
Abstract
This study investigates finite-time attitude synchronization and tracking control of multiple rigid bodies under event-triggered control strategy in presence of actuator faults and an external disturbance. The event-triggered implementation technique aims to reduce resource utilization in regard to control effort and communication burden. To achieve this aim, the adaptive sliding mode structure is used, and a novel triggering condition is proposed. In presence of unknown actuator faults and external disturbance, it is shown that the multiple rigid bodies track a time-varying attitude of a virtual leader synchronously in finite time under limited data communication. Moreover, a lower bound on the inter-event times has been derived to ensure that the Zeno behavior is avoided. The effectiveness of the proposed method is validated by numerical simulation along with comparison with another relevant research.
Keywords
1. Introduction
In recent years, attitude synchronization and tracking control of multiple rigid bodies has drawn increasing attention because of more requirement for reliability, fault-tolerant capability, and lower cost (Rahimi and Binazadeh, 2020). From practical point of view, efficient resource utilization is a very important factor in cooperative control of multi-agent mission, especially when lifetime duration and the number of agents are significant, such as space missions. Event-triggered control (ETC) strategy is used successively in the past few years for efficient resource utilization. In ETC strategy, control signal and information of the neighboring agents are updated when it is necessary. This control methodology leads to less cost and energy consumption by decreasing the control effort and communication burden among the agents. Different from time-triggered control in a periodic manner, ETC updates its states when its event-triggering condition holds, that is, the error between the sampled and the real-time states exceeds a certain threshold value (Wang et al., 2018). Although ETC has been studied on a single vehicle attitude control problem repeatedly (Chenliang et al., 2019; Wu et al., 2018; Liu et al. 2020a; Wang et al., 2019b, 2019c; Xing et al., 2017; Tian et al., 2020; Jiang et al., 2019; Ghasemzadeh Ebli and Nekoui, 2019; Xu et al., 2020), more challenging problems arise in the decentralized cooperative attitude control of multiple vehicles (Weng et al., 2016; Guo and Zhang, 2019; Zhou et al., 2018; Liu et al., 2020b; Weng and Yue, 2016; Zhang et al., 2018; Guo et al., 2020; Wang et al., 2020; Xu et al., 2019) where the information of the neighboring vehicles is not continuously available for making each vehicle’s control signal because of decreasing the communication pressure among the vehicles. For example, Guo and Zhang (2019) propose an event-based adaptive coordinated attitude controller for chip satellite cluster. Zhang et al. (2018) study attitude control of multi-spacecraft based on a novel event-triggered strategy such that the control updating and data transferring among the spacecraft are executed at certain triggering time. Wang et al. (2020) investigate distributed coordinated attitude control of multiple disturbed rigid spacecraft based on the event-triggered communication strategy. The problem of attitude synchronization and tracking control of multiple spacecraft is studied by Xu et al. (2019) in which limited inter-spacecraft communication, model uncertainty, and external disturbance are considered simultaneously. This study proves that the attitude of the spacecraft converges asymptotically to the desired attitude synchronously. Indeed, in control of multiple rigid bodies, the occurrence of faults becomes more probable as the complexity of the systems is increased (Mihankhah et al., 2013). In response to more safety and reliability issues, fault-tolerant ETC has attracted much attention from the academics and industries (Wang et al., 2019a, 2019d; Wei et al., 2020; Shen et al., 2019; Ye et al., 2018; Choi and Yoo, 2018). Wang et al. (2019a) solve the problem of event-triggered attitude tracking control of spacecraft which suffers from external disturbance, inertia parameter uncertainty, and actuator fault using the adaptive backstepping method. Wei et al. (2020) propose a neural network–based fault-tolerant tracking controller under event-triggered–based strategy such that no fault detection and identification mechanism is required. Wang et al. (2019d) deal with fault estimation and fault-tolerant control of a single linear dynamic system under event-triggered strategy. The problem of leader-following consensus under switching topology and event-triggered scheme has been solved by Shen et al. (2019). Distributed adaptive ETC of the general linear system is considered in Ye et al. (2018) while some adaptive parameters are presented to improve the self-regulation ability. The tracking problem of a class of interconnected nonlinear systems facing actuator fault in the event-triggered framework is solved in Choi and Yoo (2018).
To solve the problem of event-triggered–based fault-tolerant attitude control of multiple rigid bodies, the sliding mode control (SMC) structure is vastly used because of the rapid response, easy implementation, and intrinsic robustness against the faults, disturbance, and uncertainties (Mihankhah and Doustmohammadi, 2020). Most of the aforementioned ETC research studies satisfy asymptotic convergence to the desired attitude. However, asymptotic convergence is not sufficient during the critical phase of some real-time attitude control missions, especially in the multi-vehicle system (Wang and Zhang, 2019). To handle this circumstance, finite-time SMC has received much attention because of fast response, high precision performance, and better disturbance rejection capability (Rahimi and Binazadeh, 2019). Few research studies consider finite-time control of multiple rigid bodies based on the SMC and event-triggered structure (Wang et al., 2018; Nair et al., 2017; Zhou et al., 2018). Wang et al. (2018) propose a two-layer event-triggered mechanism to solve the finite-time consensus problem of some disturbed multi-agent systems while the Lipschitz condition must be held in the nonlinear dynamic. An integral sliding mode controller is proposed by Nair et al. (2017) to deal with the event-based consensus problem of the linear multi-agent system in finite time where bounded external disturbance is considered. Zhou et al. (2018) investigate the consensus problem of the multiple Euler–Lagrange system using integral SMC under event-triggered–based protocol by the assumption that a semi-Lipschitz condition must be hold.
Consideration of the circumstances stated above has motivated us to develop an event-triggered–based finite-time controller for attitude synchronization and tracking control of multiple rigid bodies in presence of actuator faults and external disturbance. Using the adaptive SMC structure, the proposed controller can accommodate unknown multiplicative and additive actuator faults and external disturbance. In addition, a novel asynchronous triggering condition is proposed where the states of the agents are triggered at different time instants leading to less communication burden and control efforts. Unlike the aforementioned relevant studies such as Wei et al. (2020), Zhou et al. (2018), and Shen et al. (2019), the proposed event-triggered controller has the advantage that it uses the self-angular velocity value only at the triggering times leading to less variations in control signals and less energy consumption. Another advantage is that the fault-tolerant capability is achieved without requiring any fault detection and identification mechanism. At the same time, a lower bound on inter-event times is obtained that guarantees Zeno behavior prevention. To the best of our knowledge, the problem of finite-time fault-tolerant attitude synchronization and tracking control of multiple rigid bodies has not been studied in the framework of the event-triggered strategy. Indeed, the main contributions of this study can be summarized as follows: 1. An ETC strategy is developed based on the SMC structure to solve the problem of attitude synchronization and tracking control of multiple rigid bodies in presence of actuator faults and external disturbance. 2. An adaptive mechanism is incorporated into the controller to handle unknown multiplicative fault. 3. Unlike most event-triggered–based attitude controllers, the proposed controller does not have a complicated structure and achieves attitude synchronization and tracking in finite time. 4. The triggering conditions and controllers are designed such that the states of each rigid body are triggered at different time instants preventing unnecessary variations in control signals and communication among the agents.
Compared with the most relevant recent studies, the proposed approach considers simultaneous attitude synchronization and tracking control of multiple rigid bodies, event-trigger control strategy, finite-time convergence, fault-tolerant, and disturbance rejection capabilities. Moreover, the triggering conditions of the multiple bodies are activated in an asynchronous manner to reduce the communication pressure, and the controllers use only the triggered value of the self-angular velocities to decrease energy consumption. Wang et al. (2018) and Nair et al. (2017) have studied the ETC problem with finite-time convergence, but they have neither considered attitude synchronization and tracking problem nor the fault issue. In particular, Wang et al. (2018) assume that the Lipschitz condition must be held in a nonlinear dynamic model of the system (this is a condition that is not easily satisfied). Also, Nair et al. (2017) do not consider the nonlinear systems at all. Even though Wang et al. (2020) and Gue et al. (2020) solve the problem of coordination attitude control for a group of rigid spacecraft that obey a directed communication topology in spite of undirected communication topology assumption in our work, finite-time convergence and fault-tolerant capability are not considered. Shen et al. (2019) and Ye et al. (2018) have considered the coordinated control of the multi-agent system in presence of actuator fault, but the finite-time convergence and nonlinear dynamic model have not been discussed. As opposed to this study, although Guo and Zhang (2019), Zhang et al. (2018), and Xu et al. (2019) study event-based coordinated attitude control of multiple spacecraft and guarantee asymptotic convergence in presence of external disturbance, fault-tolerant capability and finite-time convergence are not considered by them.
The outline for the study is as follows: Preliminaries are given in Section 2. The proposed event-triggered–based controller along with stability proof is presented in Section 3. Numerical simulations demonstrating the effectiveness of the proposed method are presented in Section 4. Finally, conclusion and future works are given in Section 5.
2. Preliminaries
In this section, attitude dynamic of the rigid bodies, some notes about graph theory, and the required lemmas needed for the proposed theorems are stated.
2.1. Rigid bodies attitude dynamic and kinematic
Unit quaternion is used for representing the attitude of the rigid bodies in the formation to avoid singularity. The unit quaternion of the ith rigid body is defined as




It is assumed that the actuators encounter loss of effectiveness (LOE) and bias faults. So, by incorporating the actuator fault dynamics into (3), faulty dynamic is obtained as

If the efficiency factor equals one, the corresponding actuator works normally; otherwise, it loses its effectiveness, that is, The following assumptions are considered in this study:
The external disturbance vector is assumed to be unknown, but it is bounded above such that
The efficiency factor coefficients,
Actuator bias fault may be time varying and unknown, but it is bounded, that is, The rigid bodies in the formation must track the attitude of a virtual leader, The relative angular velocity between the ith rigid body and the virtual leader represented in the body frame of the ith rigid body (velocity error) is given by Based on (6)–(8), relative attitude kinematic and dynamic models are obtained as







2.2. Graph theory
The agents in the formation need to exchange information for establishing the cooperative control strategy. A graph is used for modeling and analyzing the communication network between the agents. The graph
Communication topology among the rigid bodies obeys an undirected connected graph.
2.3. Lemmas
In this section, some lemmas are presented that are required for the subsequent proposed theorems.
(Hardy et al., 1952). The following inequality holds for

(Liu et al., 2020a). Suppose

(Zhu et al., 2011). Consider the system
3. Event-triggered–based fault-tolerant attitude control design
In this section, the event-triggered fault-tolerant control methodology is proposed based on the SMC structure. At first, a sliding surface is used to guarantee the finite-time convergence and then it is followed by proposing the cooperative ETC law for reaching the sliding surface in the presence of actuator faults and external disturbance. The event-based controllers satisfy attitude synchronization and tracking of virtual leader’s attitude, whereas limited communication among the agents is held. Another advantage of the proposed method is the control signals remain constant between two consequent event times that leads to less control effort and energy consumption.
3.1. Event-triggered sliding mode controller
The sliding surface for each rigid body is proposed as

The second phase in the event-triggered sliding mode controller implementation is to design a control law such that the trajectory of the system achieves the sliding manifold under simultaneous occurrences of LOE, bias fault, and external disturbance. The communication between the ith agent and the other agents is only performed at some triggering times depicted by
The proposed control law is defined as (see Theorem 1)




In (20),

In (18),
Consider the attitude error dynamic of the multiple rigid bodies in presence of actuator’s LOE and bias faults and external disturbance described by (10)–(12) and suppose that Assumptions 1–4 are valid. Then, using the event-triggered fault-tolerant control law (16)–(18), adaptive law (19), and the event-triggered condition (20), the attitude of the rigid bodies converges to a desired neighborhood of the virtual leader’s attitude synchronously in finite time in a sense that
Consider a Lyapunov candidate function as Using Using the adaptive law (19) and definition of By definition of Applying Using Young’s inequality with Using definition of L, one can write Then, using triggering condition (20), one can obtain Using Lemma 2, one can obtain

Hence, (32) can be written as Combining equations (33) and (35) yields Therefore, according to Lemma 3, the origin of V is practical finite-time stable and the trajectory of the multiple rigid bodies can be synchronously driven to the neighborhood of

3.2. Admissibility of the event-triggered scheme
In this section, the admissibility of the proposed event-triggered algorithm is demonstrated in a sense that inter-event time is bounded below (Zeno behavior is prevented).
Consider the attitude error dynamic of the multiple rigid bodies in presence of actuator’s LOE and bias faults and external disturbance described by (10)–(12), and suppose that Assumptions 1–4 are valid. If the adaptive control signals (16)–(18) along with the triggering condition (20) are implemented to achieve event-based finite-time attitude synchronization and tracking control of multiple rigid bodies, then inter-event times,
The parameter Now, using (21), one can obtain The derivative of the Equation (39) can be simplified as According to results of Theorem 1, we know that Integration of (39) with respect to t from In other words,


From (42), it is important to note that the nonzero constant
4. Simulation results
Numerical simulation is performed to verify the effectiveness of the proposed control methodology. Formation of four rigid bodies under a fixed undirected connected communication topology is used in this study that is depicted in Figure 1. In addition, the comparison between the proposed event-triggered methodology in this study and the event-triggered scheme in Xu et al. (2019) is provided through numerical simulation results to illustrate the benefits of the proposed method. Similar to our work, Xu et al. (2019) solve the problem of attitude synchronization and tracking control of multiple rigid bodies based on the event-triggered and SMC strategy, but the fault-tolerant capability and finite-time convergence are not considered. Because of space constraint and assumption of four rigid bodies in this part, more comparison could not be demonstrated here, but similar results can be achieved easily. Communication topology among the rigid bodies.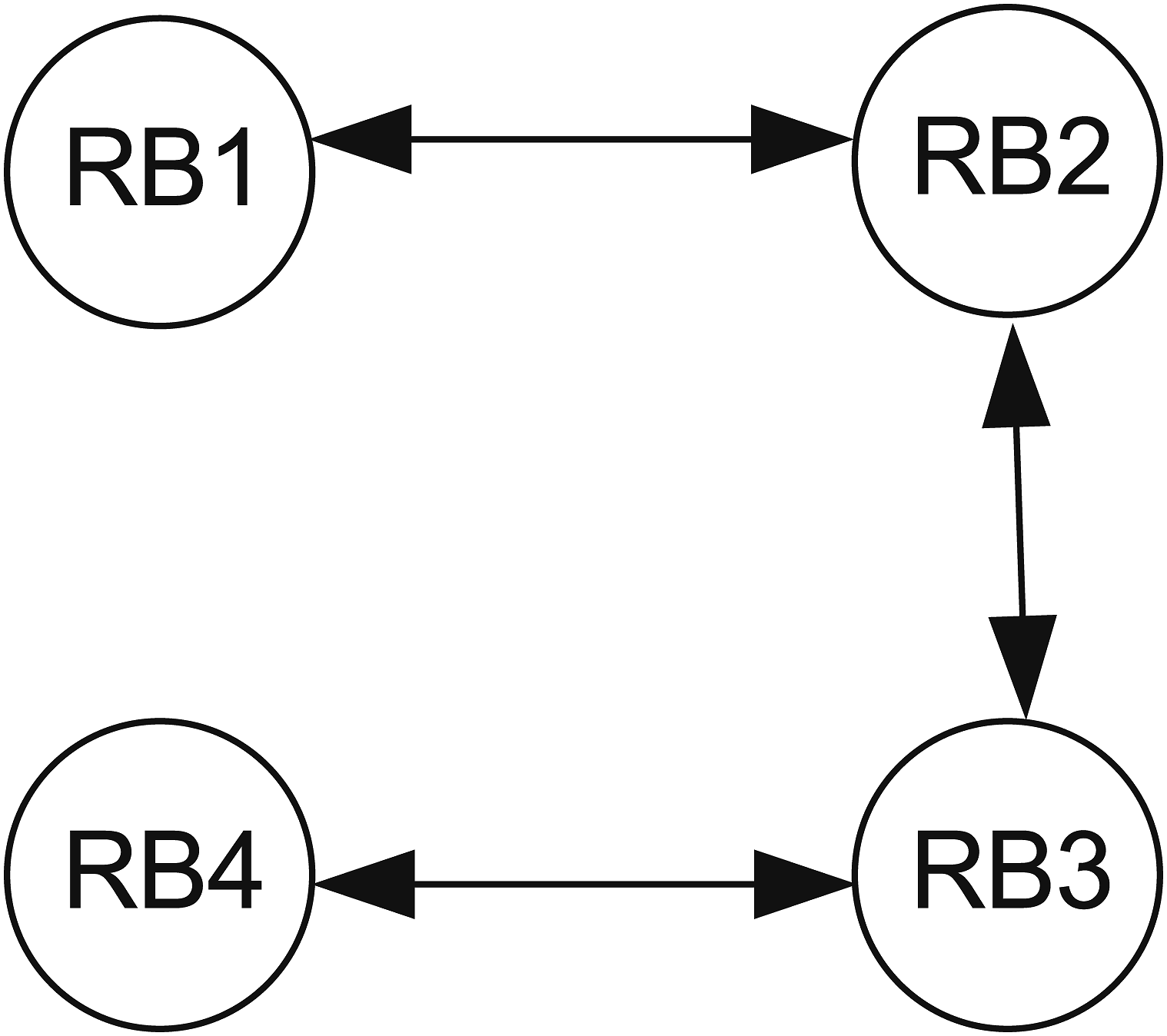
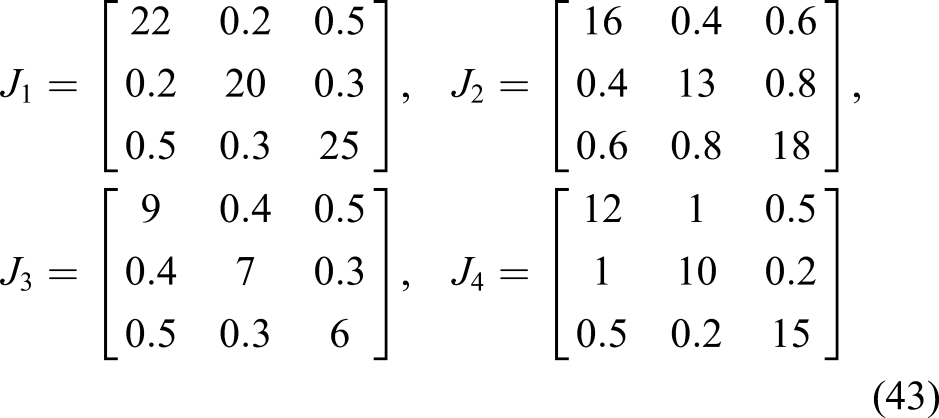
Suppose the inertia matrices of the rigid bodies are given by
Furthermore, suppose that the initial attitudes and angular velocities of the rigid bodies are chosen as (44) and (45), respectively

The external disturbance on the second rigid body is taken to have a nonzero value in the form of

To satisfy good performance at the sliding phase, the parameters of the sliding surface (15) are selected as
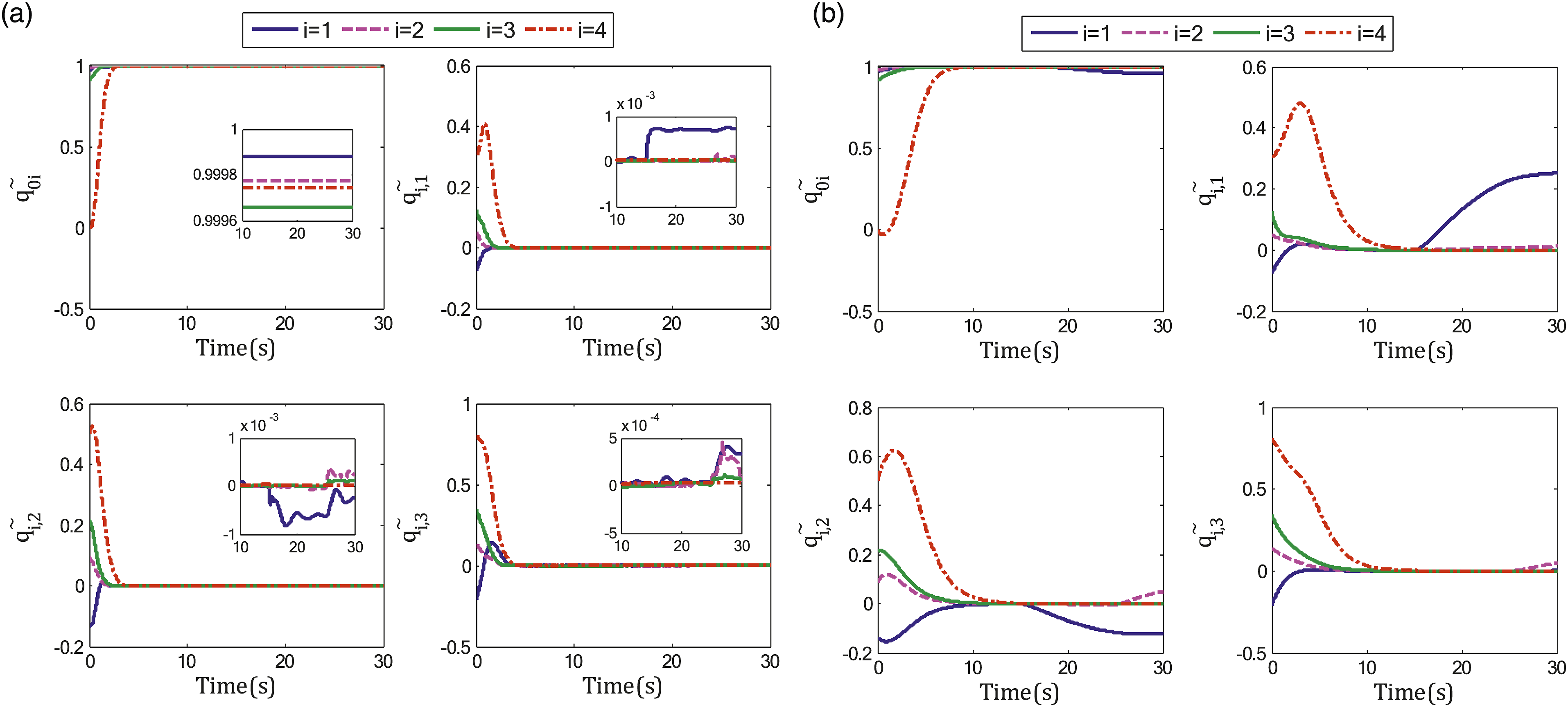
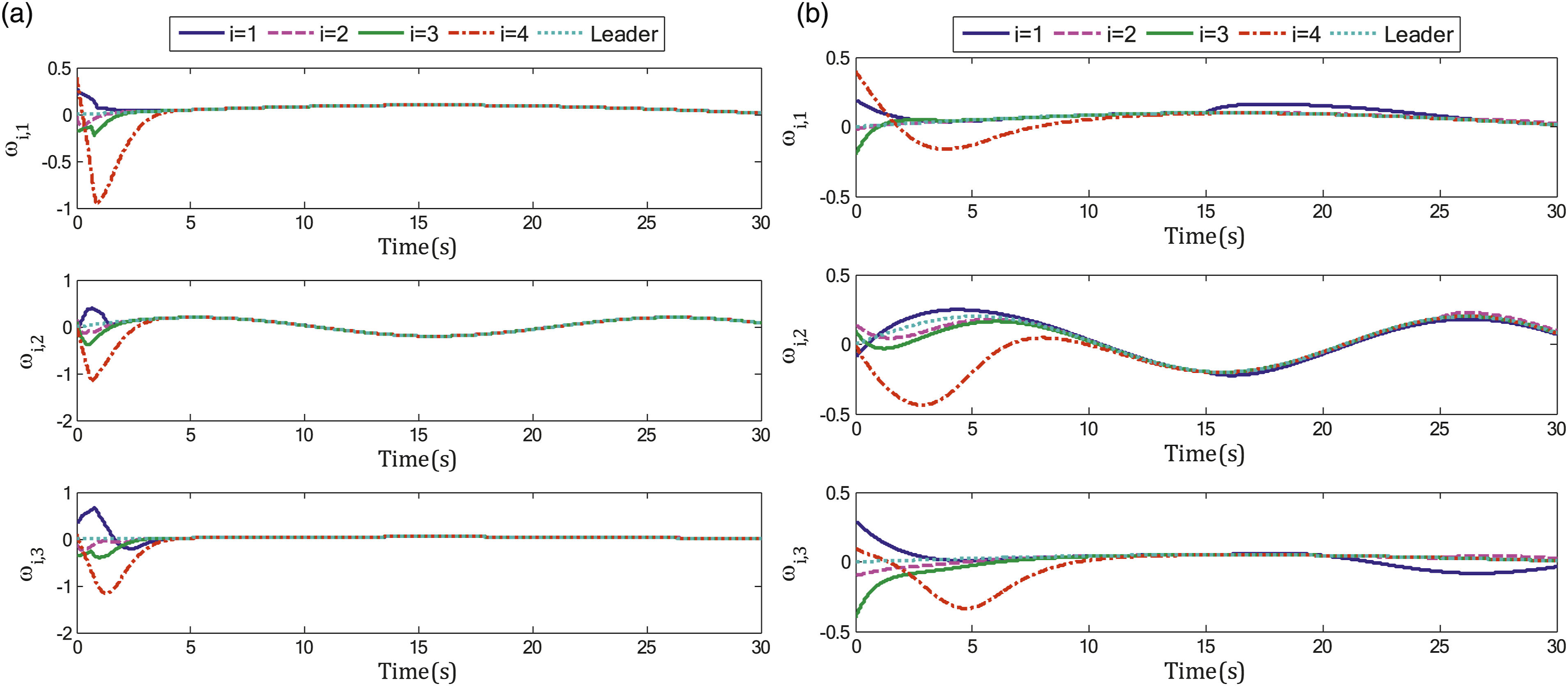
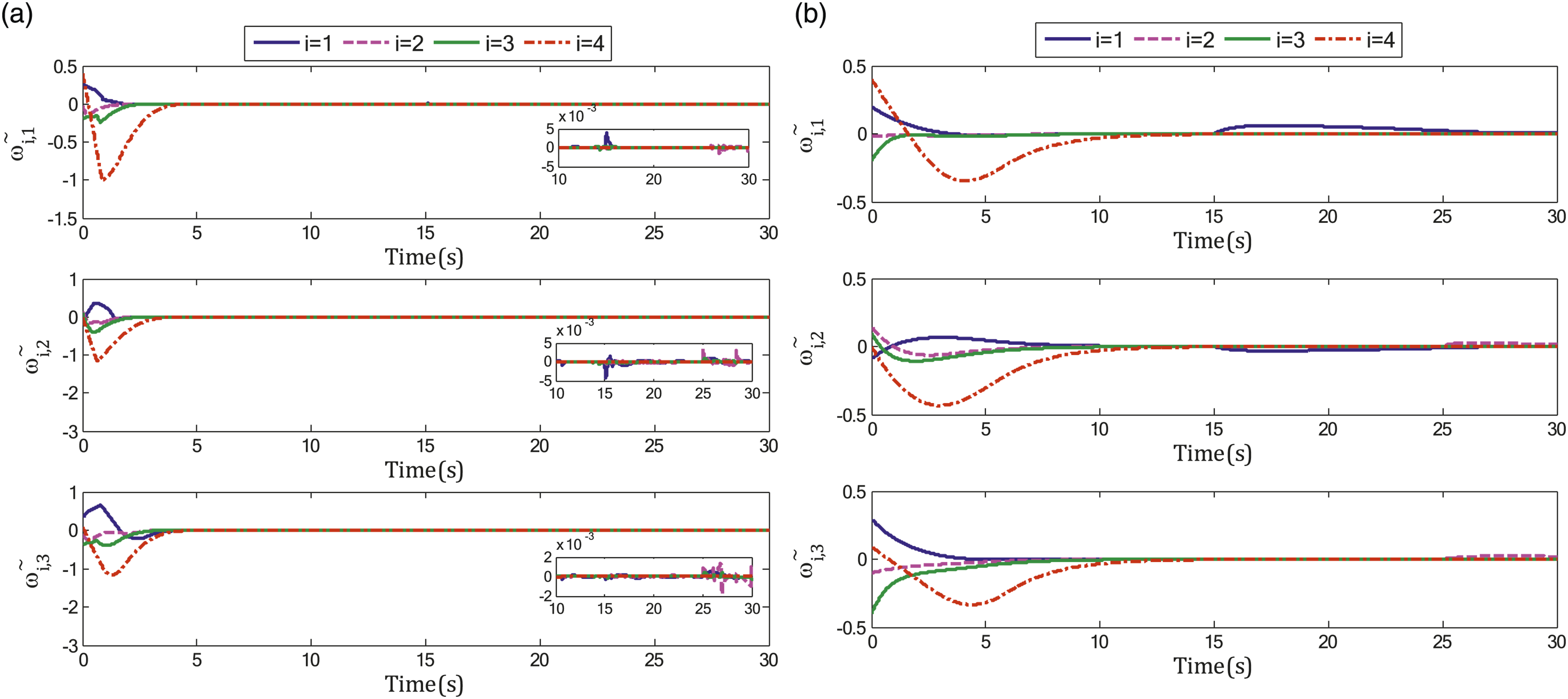
Figures 2 and 3 depict the attitude and attitude error of the rigid bodies, respectively. It can be seen that the attitude of the virtual leader is tracked by the rigid bodies synchronously in presence of actuator faults and external disturbance. A more rapid response can be obtained by selecting different coefficients of the control law (18) in the expense of more control effort. Compared with results of the method in Xu et al. (2019), more rapid response is obtained by the proposed method in this study originated from the finite-time convergence property. In addition, when actuator faults occur after t = 15, the proposed method compensates the destructive effects of fault efficiently, whereas the compared method does not, and as a consequence, the attitudes of the rigid bodies are diverged from the desired value. Angular velocities and their corresponding errors are illustrated in Figures 4 and 5, respectively. From Figure 5, it can be seen that the angular velocity errors converge to the neighborhood of the origin at a finite time while synchronization among the rigid bodies originating from the synchronization term in the control signal (17) is satisfied. The trajectories of the angular velocities do not exhibit a smooth response in the initial time of the simulation because of the larger inter-event times determined by the triggering condition (20). Comparing the results of the proposed method and the one in Xu et al. (2019), depicted in Figures 4 and 5, leads to similar conclusion about the response speed and robustness against the faults as the one that was stated before about the response of the attitudes. Time response of attitudes. (a) Proposed method. (b) Event-triggered method in Xu et al. (2019). Time response of the attitude error. (a) Proposed method. (b) Event-triggered method in Xu et al. (2019). Time response of the angular velocities. (a) Proposed method. (b) Event-triggered method in Xu et al. (2019). Time response of the angular velocity error. (a) Proposed method. (b) Event-triggered method in Xu et al. (2019).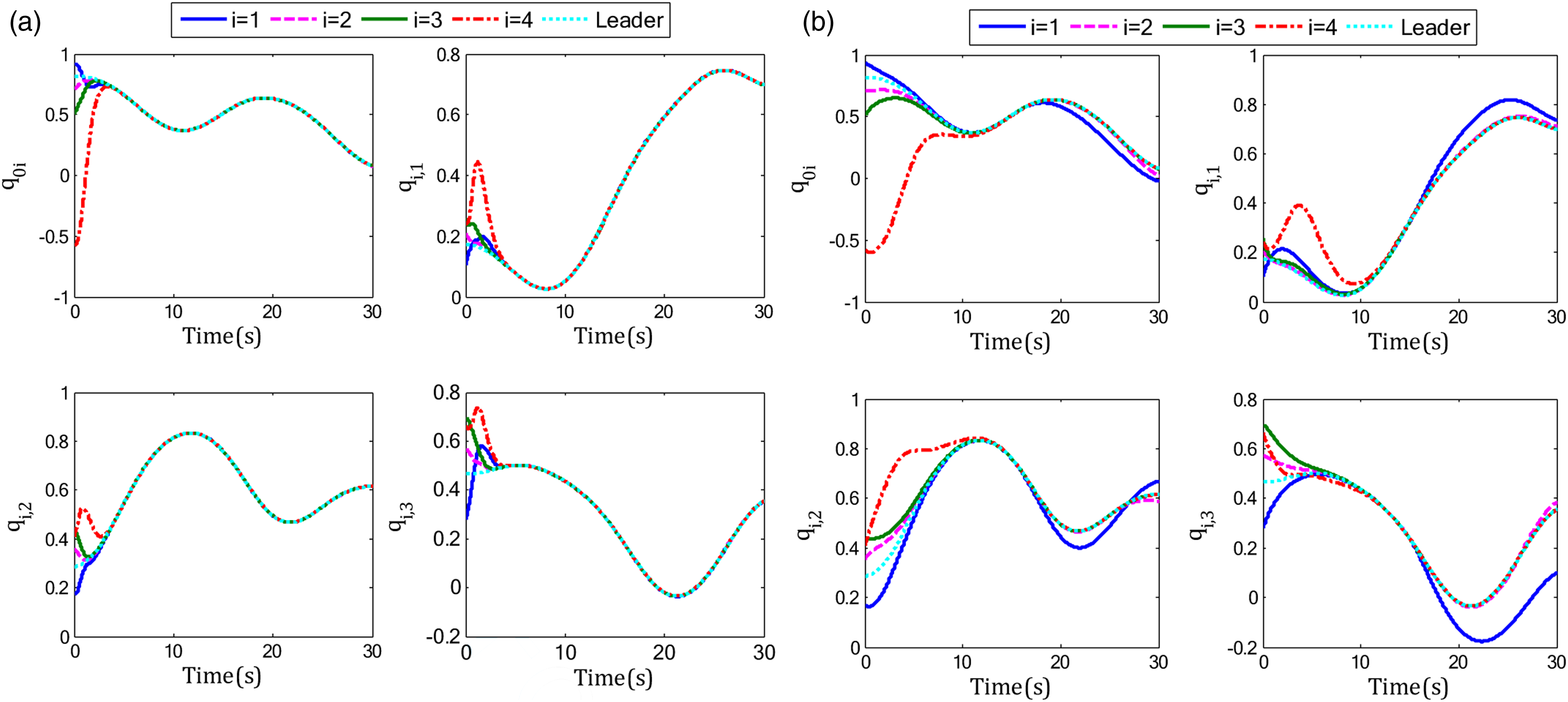
Figures 6 and 7 demonstrate the saturated control signals and the values of the triggered sliding surfaces, respectively. As can be seen from Figure 6, the input signals take values in a desirable range while the chattering is eliminated except in the initial period of simulation because of the large difference between the initial attitude of the rigid bodies and the virtual leader. As shown in Figure 7, the control law (16) makes the system trajectory reach the sliding surface very rapidly because of finite-time capability of the proposed controller. In addition, the stepwise behavior of the sliding surface values caused by the event-triggered scheme can be better seen in the first 2 s of the simulation. Although the rigid bodies formation has encountered external disturbance and actuator faults after t = 15, no destructive effects of the external disturbance and actuator faults are visible in Figures 2–5. Zooming in Figures 3 and 5, one can see that the impacts of the actuator faults and external disturbance on attitudes and angular velocities are negligible. This indeed validates the good performance of the proposed controller. The control effort to weaken the destructive effects of the actuator fault and external disturbance to maintain the system trajectory in the neighborhood of the desired values can be seen in Figure 6. For example, at Time response of the control signals. (a) Proposed method. (b) Event-triggered method in Xu et al. (2019). Time response of the sliding surfaces. (a) Proposed method. (b) Event-triggered method in Xu et al. (2019).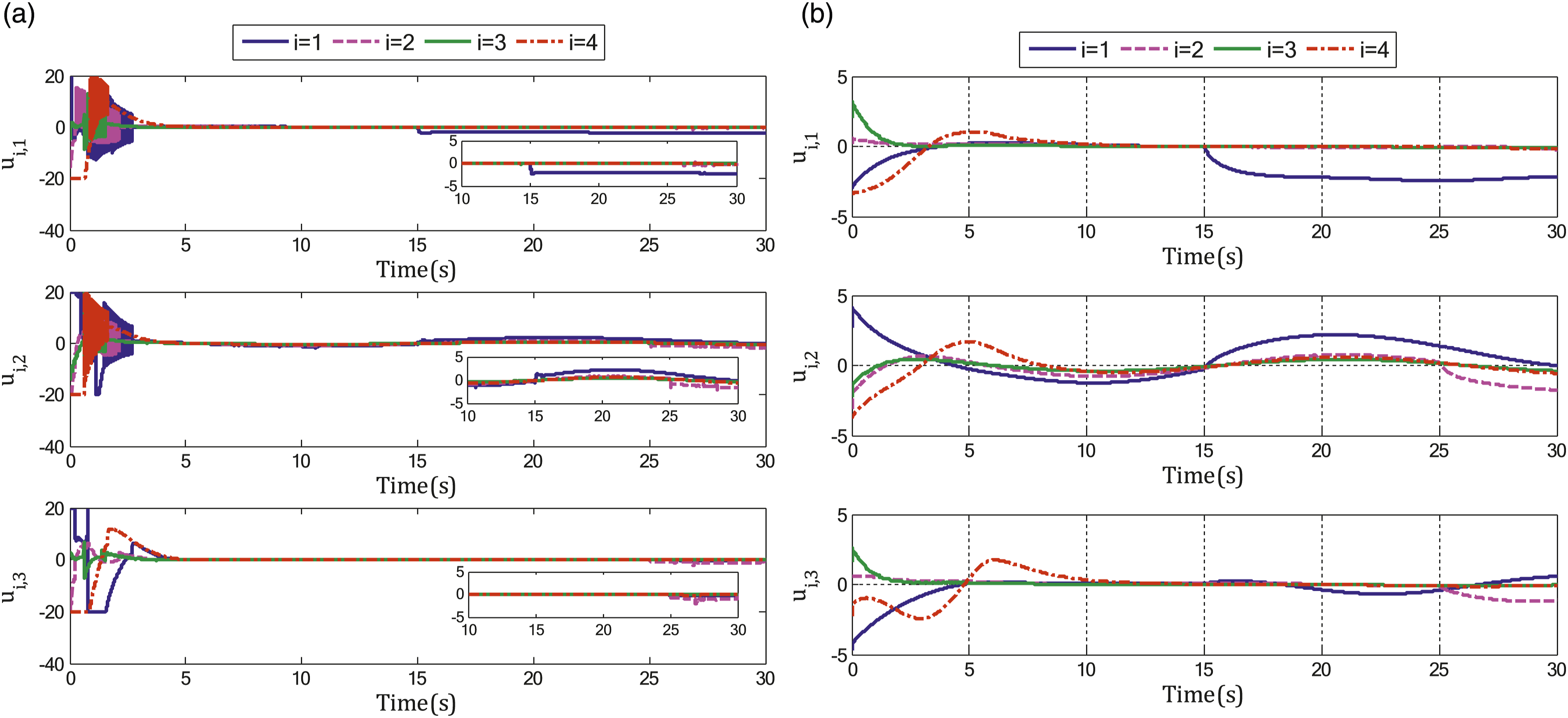
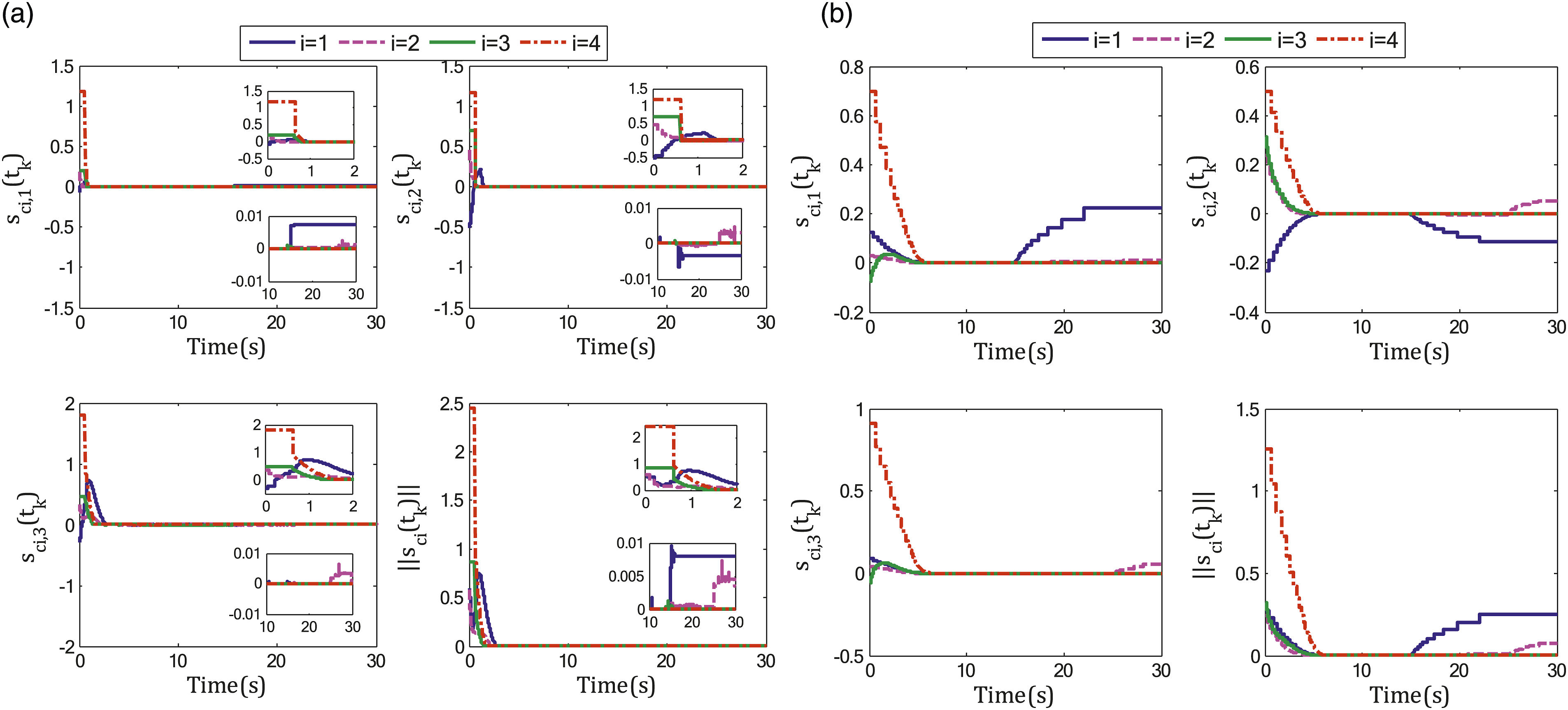
In addition, the control law makes successful modification of the corresponding input signal to maintain the sliding surfaces in the vicinity of the origin in presence of multiplicative faults of the first and the second actuators of RB3 at Inter-event times of the rigid bodies.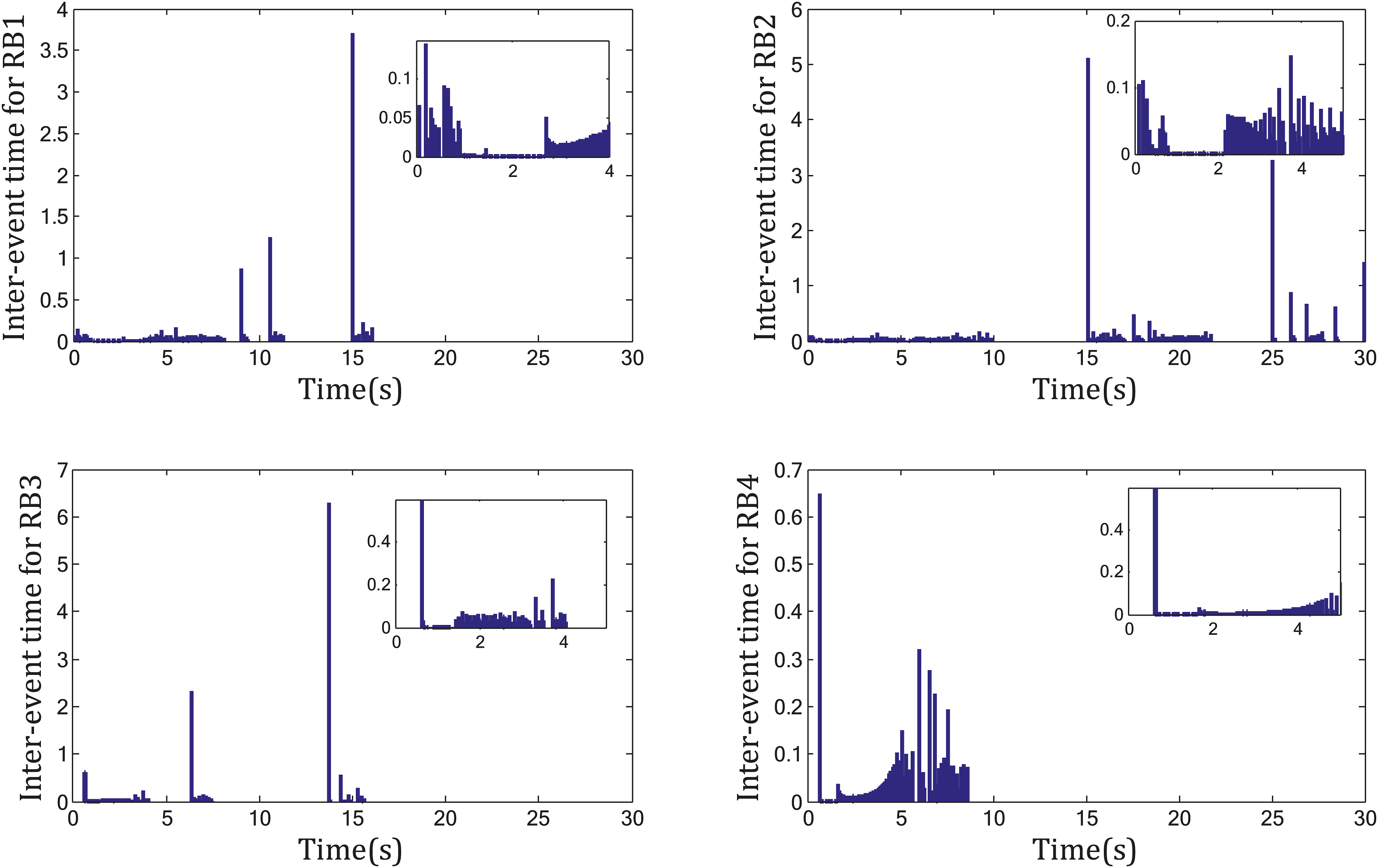
5. Conclusion
In this study, the problem of event-triggered–based fault-tolerant attitude synchronization and tracking control of multiple rigid bodies with finite-time convergence has been solved. For this purpose, the adaptive SMC structure was used, and a novel triggering condition was proposed. It was shown that the proposed event-triggered technique has reduced resource utilization in regard to control effort and communication burden in the task of synchronization and tracking control of multiple rigid bodies in presence of unknown actuator faults and external disturbance. Using the Lyapunov stability theorem, finite-time convergence of the sliding surfaces to the vicinity of
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.