
Abstract
The vibration isolation system using a pair of oblique springs or a spring-rod mechanism as a negative stiffness mechanism exhibits a high-static low-dynamic stiffness characteristic and a nonlinear jump phenomenon when the system damping is light and the excitation amplitude is large. It is possible to remove the jump via adjusting the end trajectories of the above springs or rods. To realize this idea, the article presents a vibration isolation system with a cam–roller–spring–rod mechanism and gives the detailed numerical and experimental studies on the effects of the above mechanism on the vibration isolation performance. The comparative studies demonstrate that the vibration isolation system proposed works well and outperforms some other vibration isolation systems.
Keywords
1. Introduction
Mechanical vibrations often deteriorate the performance and durability of equipment in engineering. The techniques of vibration control, thus, have received great attention over the past decades. Compared with active and semi-active techniques of vibration control (Hu, 1996; Li et al., 2019), the passive technique of vibration isolation has simpler structures and higher reliability and is the most prevalent choice in vibration control (Franchek et al., 1996). The simplest vibration isolation system has the model of a linear oscillator involving a mass
The most common NSM consists of two springs inclined to the major spring supporting the isolated object so as to provide an NSM. Carrella et al. (2007, 2009, 2012) and Kovacic et al. (2008) made comprehensive studies on the mechanism, analyzing the dynamic characteristics and optimizing the vibration isolation system. Hu et al. (2018) designed an adjustable NSM using springs and rods to act as an NSM and studied the impact of pre-compression of a horizontal spring on the vibration isolation performance. Liu and Yu (2018) connected a small-mass auxiliary system to the HSLDS vibration isolation system to eliminate the jump phenomenon because of the stiffness nonlinearity. Huang et al. (2014) replaced the inclined springs with Euler buckling beams to provide an NSM.
Recent years have also seen many attempts to replace traditional springs and rod mechanisms in the design of an NSM. For example, magnetic springs have served as an efficient NSM because of their advantages such as no contact and quick response (Li et al., 2013; Xu et al., 2013; Zheng et al., 2018). Besides, cam–roller mechanisms have also been a choice of an NSM. Liu et al. (2019) proposed an NSM of a cam–roller–spring and analyzed the influence of the radius ratio of a cam and roller on vibration isolation performance. Han et al. (2018) designed a base spring–roller vibration isolation system with curved edges as a negative stiffness element. Sun et al. (2019) investigated the effectiveness of the parabolic cam–roller mechanism under an asymmetric spring support structure.
It is noted that in the abovementioned vibration isolation systems using oblique springs or a spring–rod mechanism, the dynamic stiffness level can only be adjusted by changing the stiffness or pre-compression of the spring. Moreover, most HSLDS vibration isolation systems exhibit nonlinear jump phenomena when the system damping is light and the excitation amplitude is large, where the transmissibility changes suddenly for a small change in the frequency of excitation (Ho et al., 2012). The isolation effect vanishes at frequencies between the two jump frequencies, which causes the isolation performance to deteriorate. The current work is motivated by the fact that the surface of the cam in the cam–roller mechanism can be designed following special curves, which can be used for varying the end trajectories of the springs or rods. It will provide different restoring forces and stiffness (Liu et al., 2014) and make it possible to remove the jump. The cam is usually designed as a circular arc and approximated in a quadratic polynomial form for simplifying the calculation (Zhou et al., 2015). A parabolic cam is adopted in this work, which can provide the stiffness in an exact quadratic polynomial form without error in calculation (Sun et al., 2019).
This article presents the design and analysis of a vibration isolation system with a cam–roller–spring–rod (CRSR) mechanism shown in Figure 1, where four vertical springs with total stiffness coefficient Prototype model and its schematic diagram of the cam–roller–spring–rod isolator: (a) prototype model and (b) schematic diagram.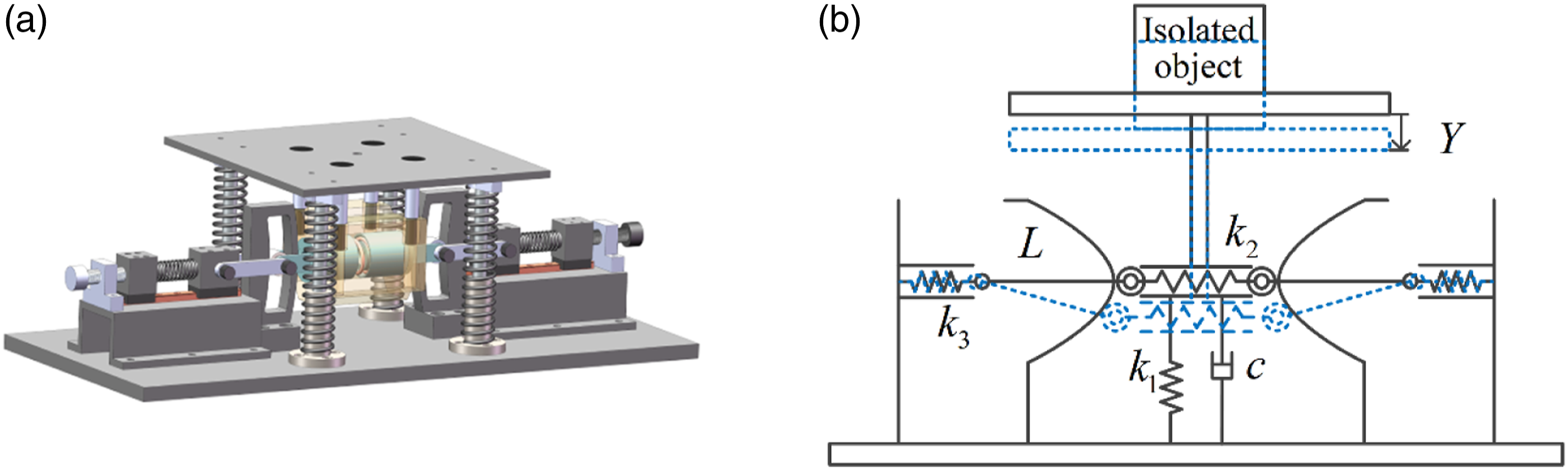
2. Static analysis
2.1. Analysis of NSM
In view of the symmetry of the system in Figure 1, only the vertical motion of the isolated object should be taken into account such that a half of an NSM in Figure 2 is analyzed. Now, the cam surface yields Force analysis of the negative stiffness mechanism.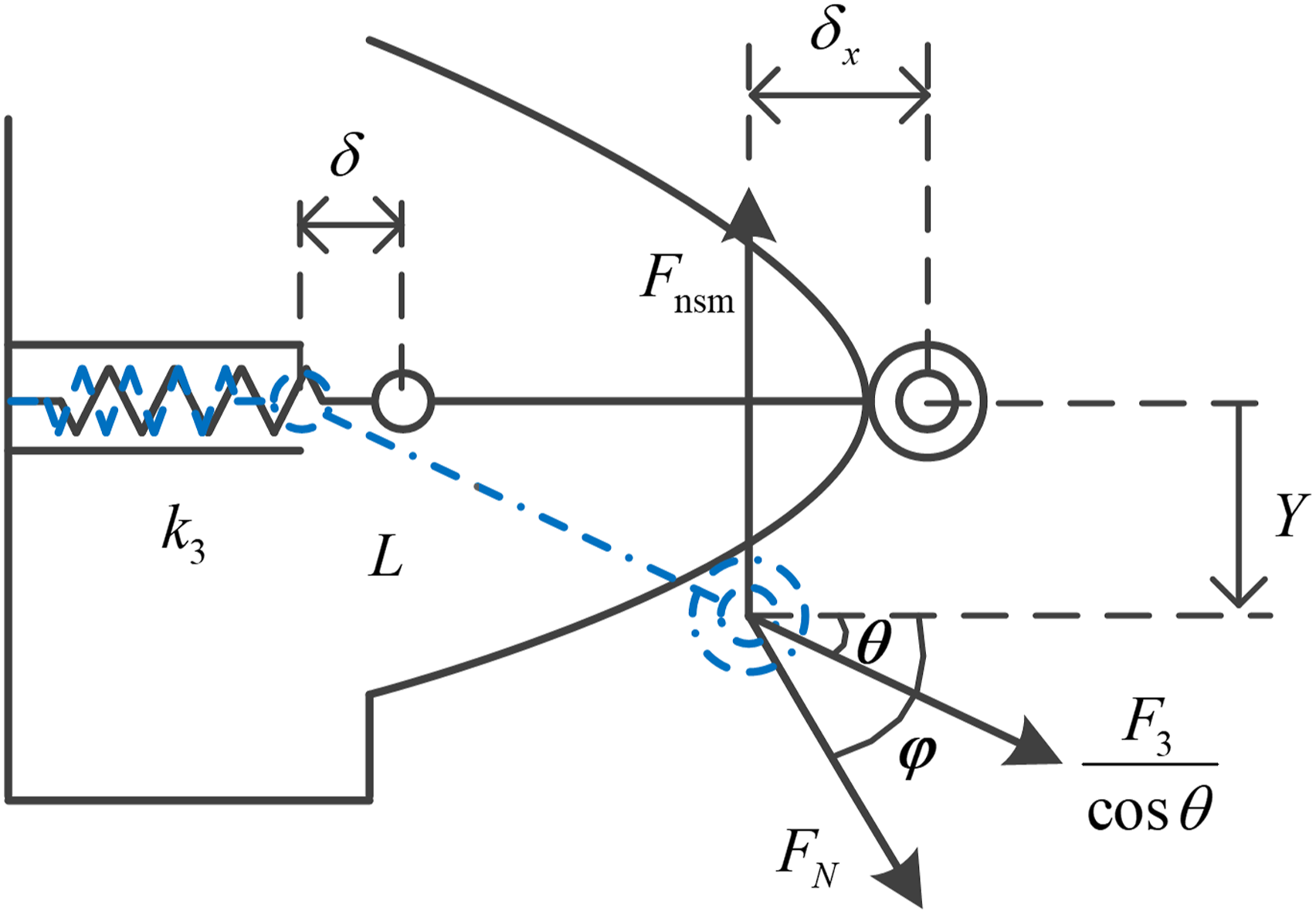
When the roller moves along the cam surface from the equilibrium position to the position in Figure 2, the compression of the horizontal spring is given by


It is easy to derive the following relations
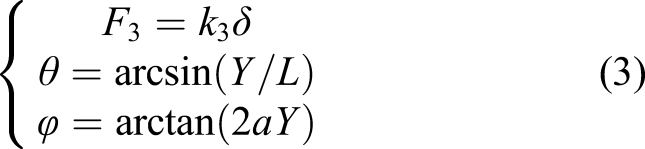
Substituting equation (3) into (2) and eliminating

By introducing the dimensionless parameters,

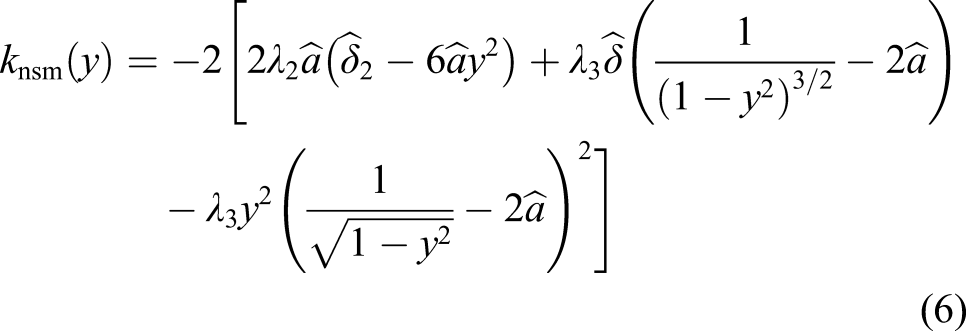
The dimensionless stiffness function can be obtained by differentiating equation (5) with respect to the dimensionless displacement
2.2. Conditions for cam–roller contact and compressed springs
Equation (2) holds true when the roller always keeps in contact with the cam surface as

The dimensionless form of equation (7) reads

For a small range of motion, both

Besides, all horizontal springs are designed in compression during motions. If

2.3. Analysis of the CRSR isolator
As shown in Figure 1(b), the vertical spring provides the positive stiffness and supports the isolated object. If the mass of the isolated object is

Therefore, the restoring force of the vibration isolator can be expressed as

Using the aforementioned dimensionless parameters, the dimensionless restoring force

It is noted that the stiffness function reaches its minimum at the equilibrium position. The vibration isolation system in Figure 1 exhibits a low-dynamic stiffness property when

which is the so-called zero-stiffness condition.
However, it is impossible to realize the above condition because of manufacturing errors (Liu and Yu, 2018), even though the zero stiffness is an ideal design of vibration isolation. Besides, the system with zero stiffness will be unstable if the vertical stiffness becomes negative. For this reason, the condition in equation (15) is relaxed as

3. Dynamic analysis
3.1. Dynamic modeling of the CRSR isolator
Figure 3 presents the schematic diagram of the CRSR vibration isolation system under a harmonic base excitation Cam–roller–spring–rod vibration isolation system under a harmonic base excitation.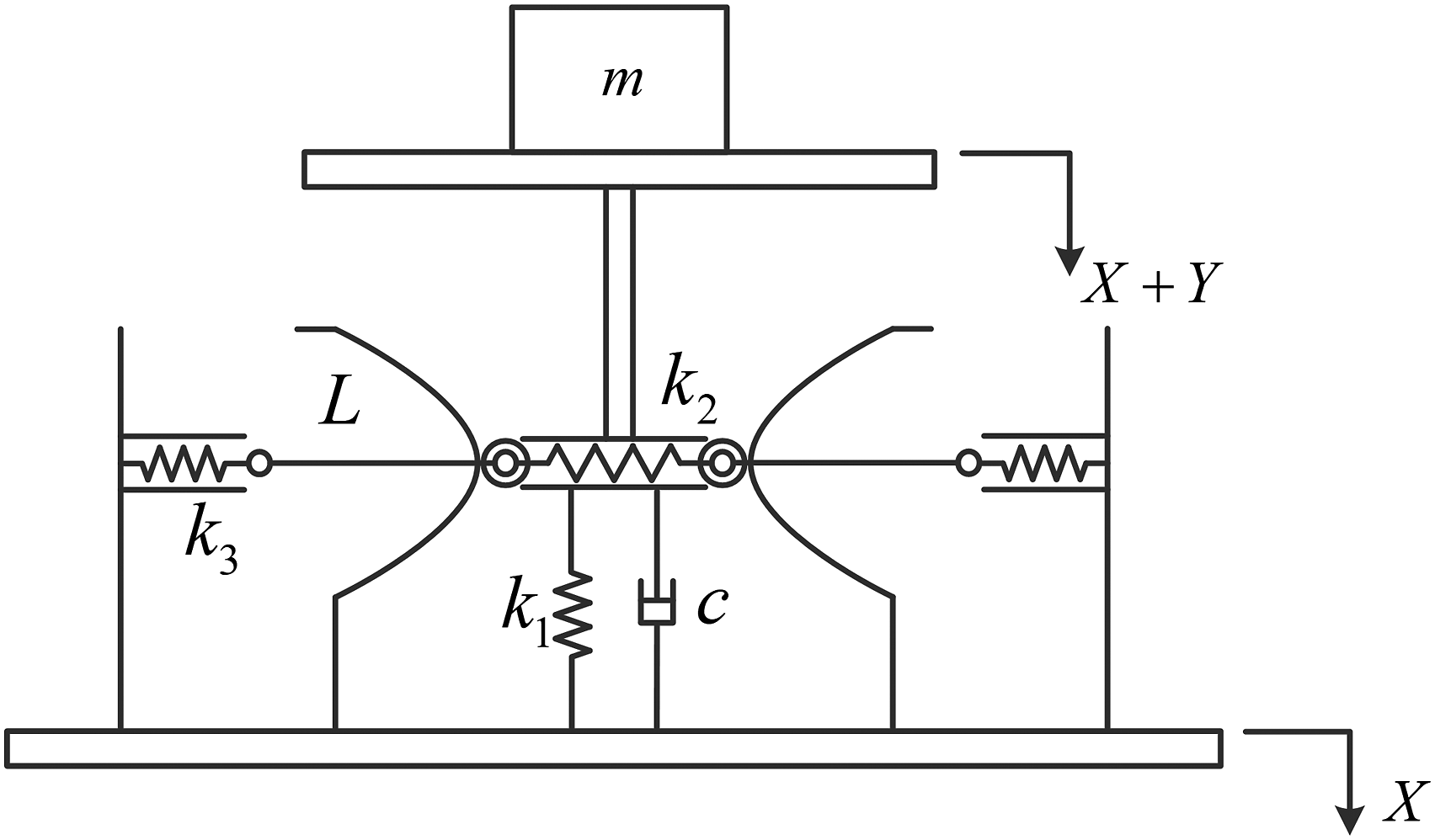

From the static equilibrium condition of equation (11), the dynamic equation of the above system in Figure 3 is given as

In the dynamic analysis as usual, the following dimensionless parameters are introduced, that is

Accordingly, equation (18) can be recast as

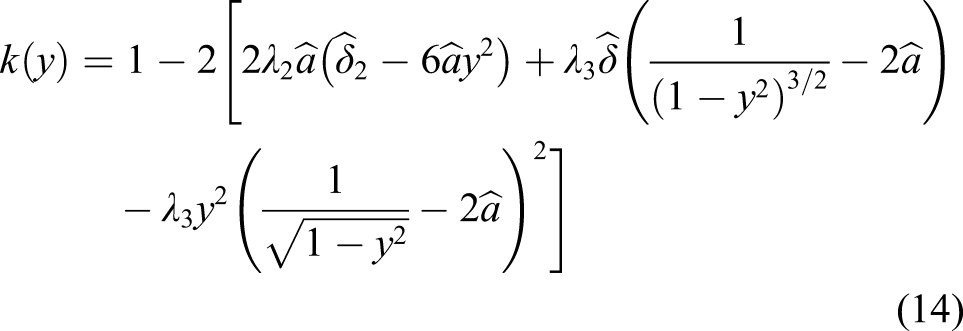
To simplify the dynamic analysis, the restoring force

where

Figure 4(a) presents both exact expression and approximate expression for the restoring force, and Figure 4(b) shows that the difference between the two expressions is less than 7% for Comparison and difference between the exact and approximate restoring forces (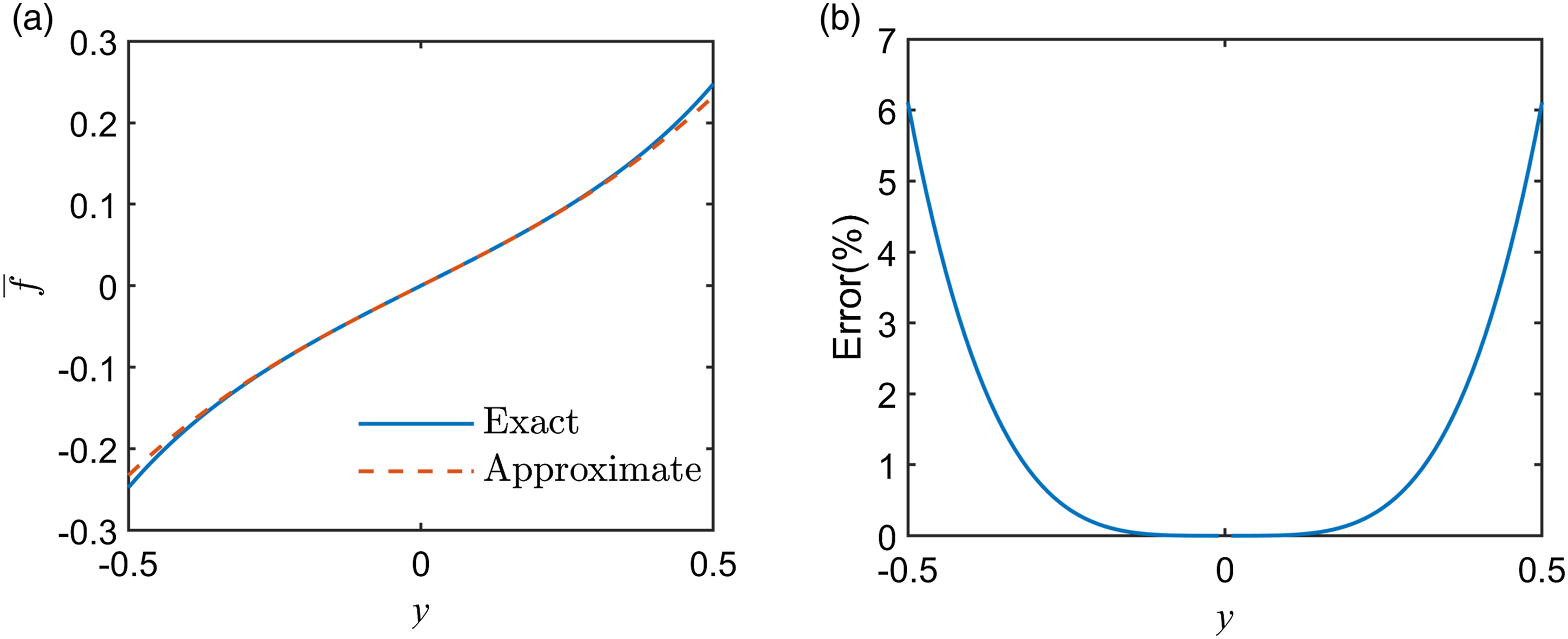
Thus, according to equations (21) and (22), (20) can be approximately written as

3.2. Analytical solution of primary resonance
According to the averaging method, the primary resonance of equation (23) can be assumed as



Then, by taking the derivative of equation (25), one obtains

Substituting equations (24), (25), and (27) into (23) and then comparing the result with equation (26), one derives the expressions of the amplitude and phase angle as follows
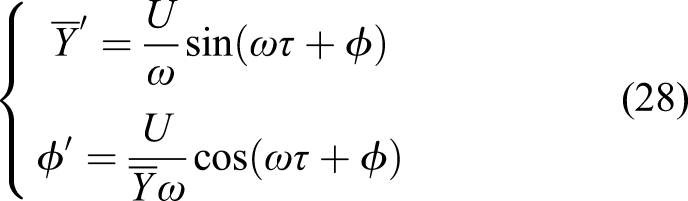
Under the slow-varying assumption, the right-hand side of equation (28) can be replaced by an average over a period of excitation as follows
After the integration, equation (29) can be expressed as
To derive the steady-state response, the left-hand side of equation (30) is set to be zero. Eliminating the phase angle

Detailed stability analysis for the steady-state response is available in Hao and Cao (2015) and Yang and Cao (2018).
Figure 5 shows the amplitude–frequency relation of the primary resonance obtained by using the average method compared with the numerical solution by using the fourth-order Runge–Kutta algorithm for the following system parameters Analytical and numerical solutions of frequency responses.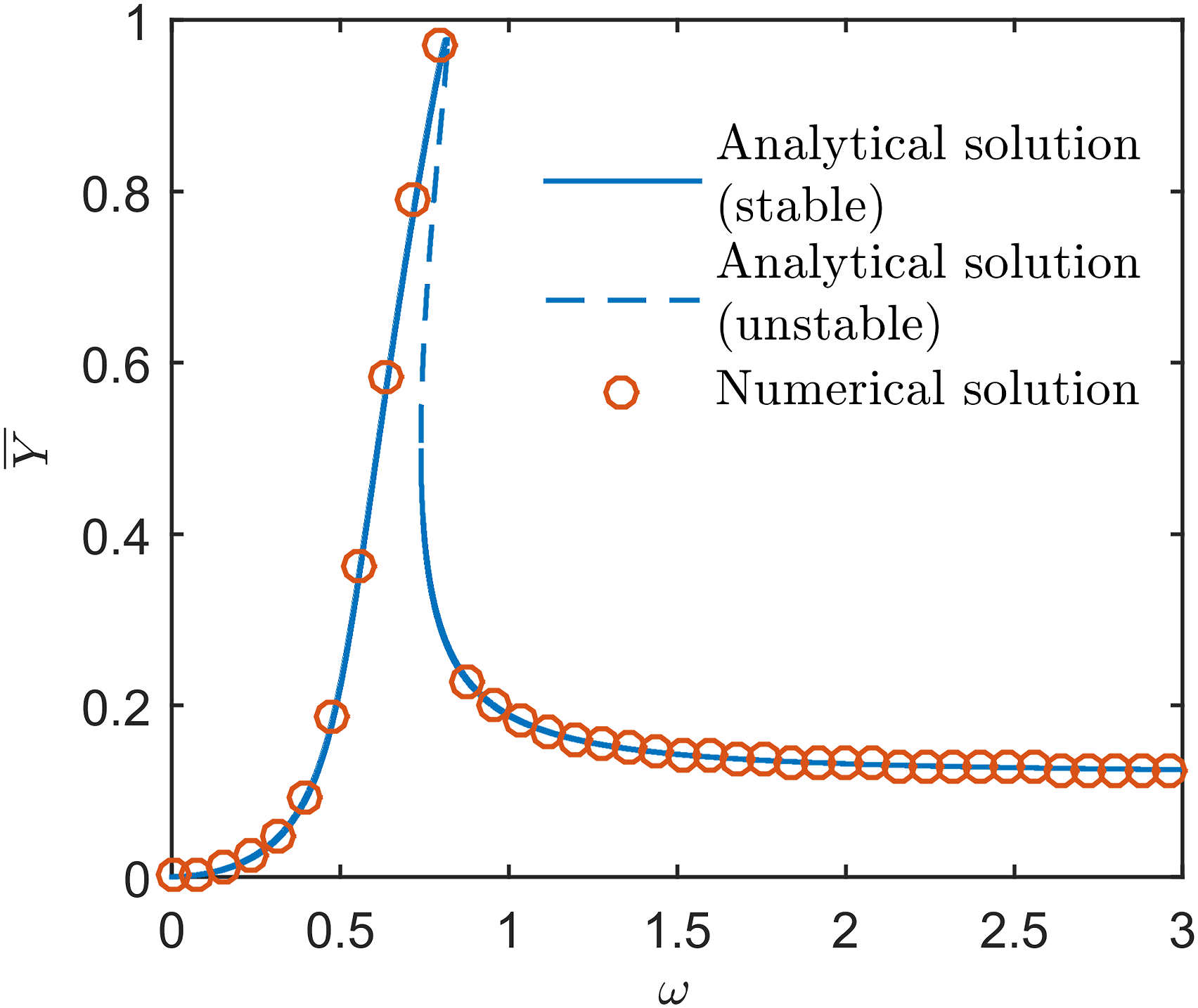
3.3. Jump phenomenon
The amplitude–frequency relation of primary resonance of a hardening Duffing oscillator often exhibits a jump phenomenon induced by the saddle-node bifurcation. Such a jump will deteriorate the dynamic performance of a hardening Duffing-type system of vibration isolation and has stimulated many studies on the jump conditions and jump avoidance (Jazar et al., 2006; Sun et al., 2018). For example, the jump-up and jump-down frequencies of a hardening Duffing-type system of vibration isolation under a harmonic force excitation were determined (Brennan et al., 2008; Kevorkian and Cole, 1981).
This subsection focuses on the jump frequencies and the corresponding response amplitudes of a hardening Duffing-type system under a harmonic base excitation described by equation (23). Following the study in Subsection 3.2, the amplitude of primary resonance in equation (31) can be reformulated as a polynomial in
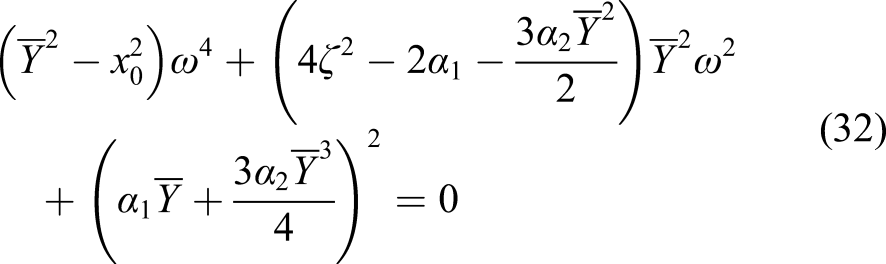
Solving the above equation gives



The jump-up frequency weakly depends on the damping coefficient (Brennan et al., 2008). Thus, by setting


Remove impossible solutions of equation (37) (two of which are equal to

In fact, only when Jump phenomenon: (a) jump phenomenon with 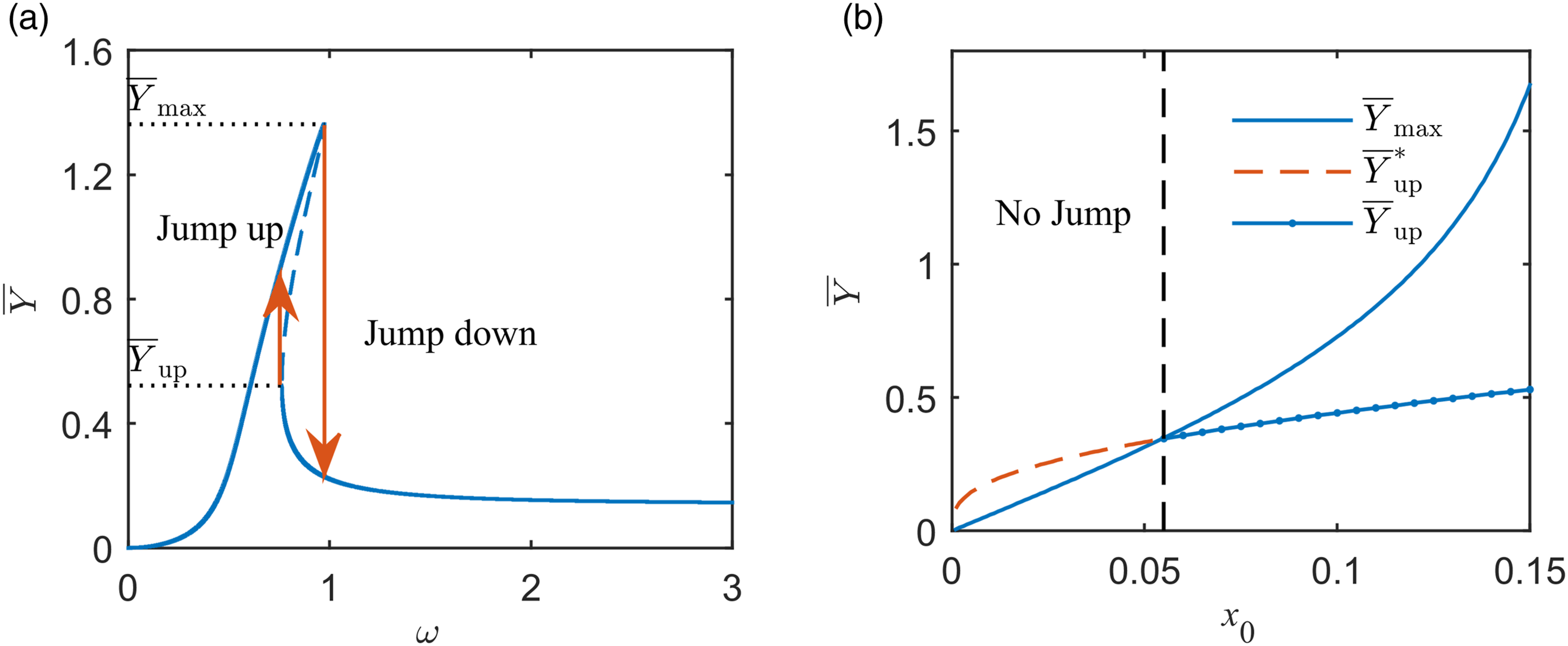
4. Comparative analysis of vibration isolation systems
The proposed CRSR vibration isolation system is compared in this section with other two vibration isolation systems shown in Figure 7. Model 1 is a common HSLDS isolation system with two spring–rod mechanisms. Model 2 uses a similar NSM with the isolator in Sun et al. (2019) that a horizontal spring is combined with a pair of cam–roller mechanisms. The effectiveness of the proposed CRSR system is verified by comparing the negative stiffness and absolute displacement transmissibility with these systems. Simplified models of two isolators: (a) Model 1: a spring–rod isolator and (b) Model 2: a cam–roller–spring isolator.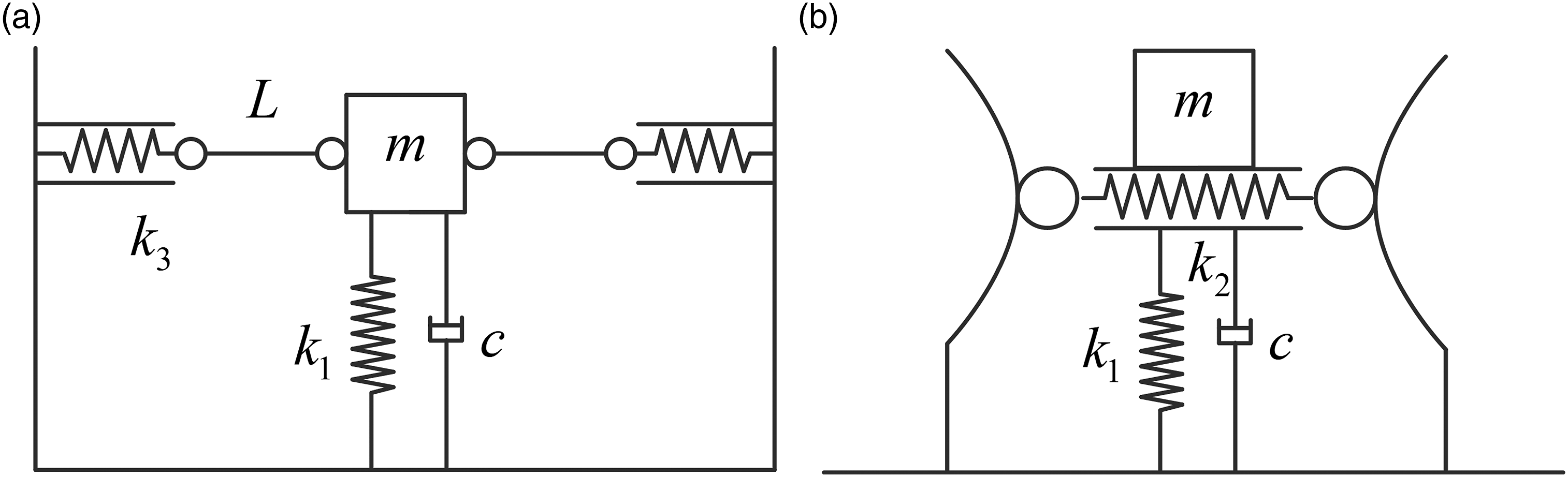
4.1. Negative stiffness
The dimensionless negative stiffness function of the CRSR system is given in equation (6), and the negative stiffness function of Model 1 can be obtained by setting

which is the same as the expression in Liu and Yu (2018). The negative stiffness function of Model 2 is calculated by
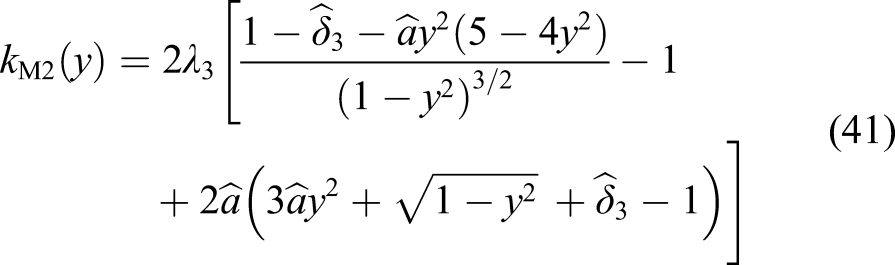
Assume that the two kinds of horizontal springs have the same stiffness, and the negative stiffness of the three systems is compared as shown in Figure 8. A wider range of relative displacement for achieving negative stiffness enables the vibration isolation system to withstand a stronger excitation. And the static carrying capacity will be expanded by combing a stiffer vertical spring if the NSM can provide a lower peak value of negative stiffness. Figure 8 shows that the CRSR vibration isolation system has the two advantages simultaneously. Dimensionless negative stiffness provided by three isolators (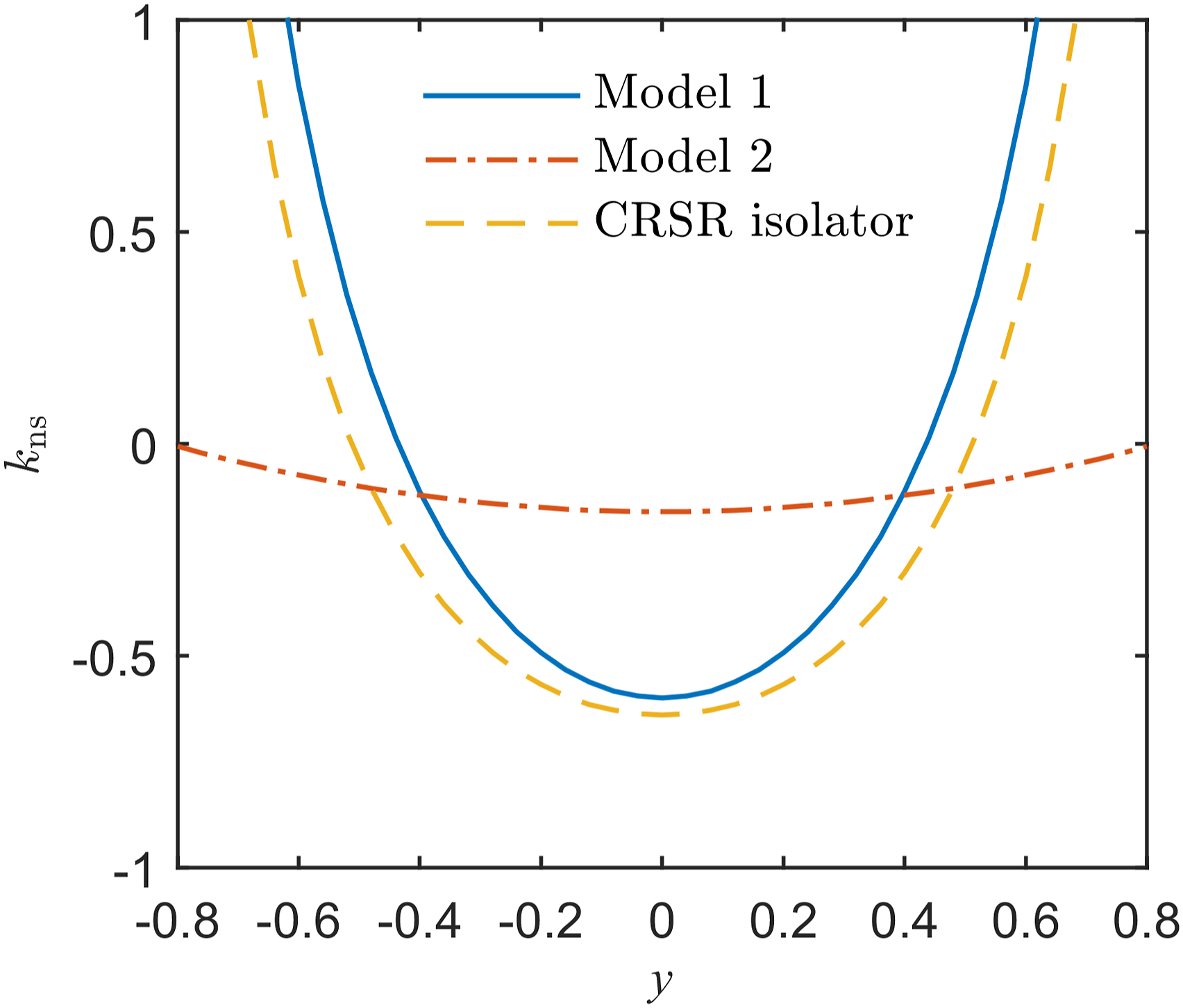
4.2. Vibration isolation performance
The vibration isolation performance can be evaluated by comparing the absolute displacement transmissibility, which is defined as the ratio of the amplitude of absolute displacement of the isolated object to the excitation amplitude of the base

Under small excitation amplitude and high damping, the vibration isolation performance is quite different from that under large excitation amplitude and light damping. Therefore, the vibration isolation performance of the three systems is analyzed in the two cases mentioned above. Besides, a linear isolation system is also included for comparison in the following.
When the damping is high enough and the base excitation amplitude is small enough, corresponding to Absolute displacement transmissibility of four vibration isolation systems (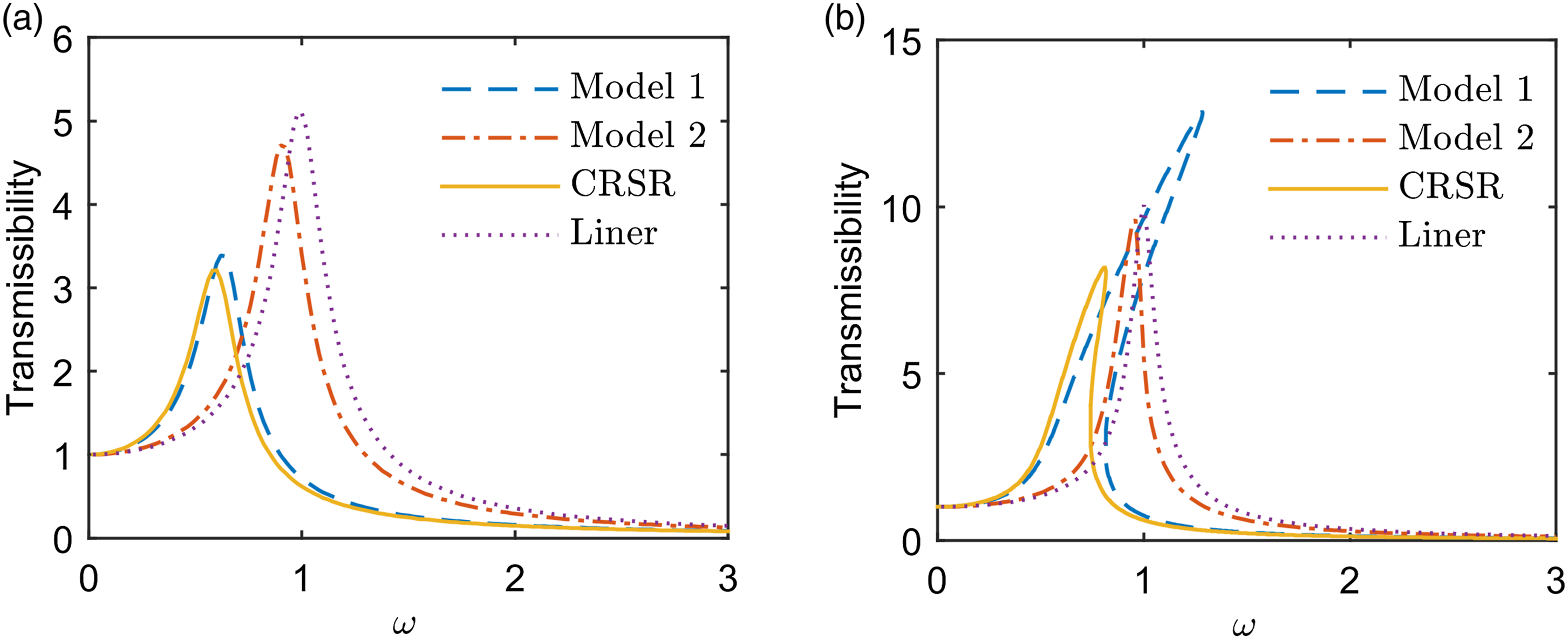
It can be seen from Figure 9 that in the first case, Model 1 has a lower peak frequency and a lower peak transmissibility than Model 2. However, under large excitation amplitude and light damping, the transmissibility curve of Model 1 will bend to the right, which will make the isolation effect even worse than the linear model. The CRSR vibration isolation system can effectively eliminate the jump phenomenon in Model 1 without affecting the vibration isolation performance in the high frequency band. The hardening nonlinearity of the isolation system is weakened by the introduction of the cam–roller mechanism. The cubic coefficient
5. Prototype and experiments
5.1. Prototype and experimental setup
Parameters of the prototype of the cam–roller–spring–rod isolator.
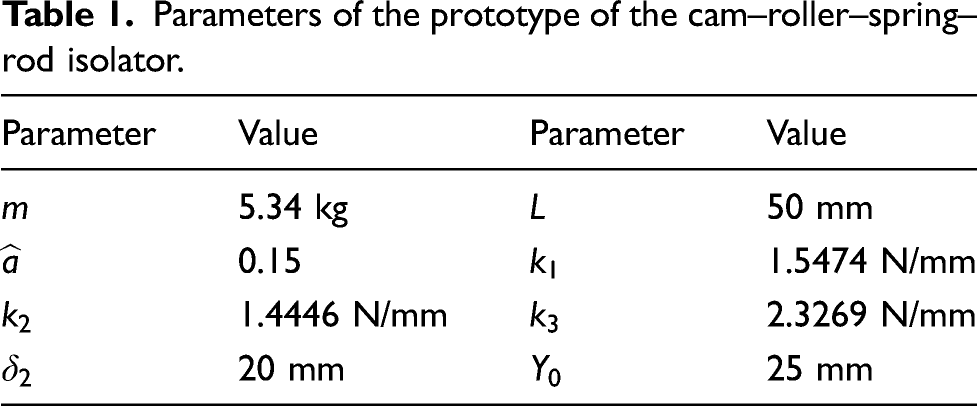
Figure 10 shows the prototype of the proposed isolator and the experimental setup. The isolator is suspended using four rubber strings and subjected to a sinusoidal displacement excitation on its base. Two acceleration sensors (A and B) are installed on the base and the upper platform, respectively. Because the absolute acceleration transmissibility and displacement transmissibility have the same expression (Han et al., 2018), the transmissibility under consideration is defined as the ratio of root-mean-square values of the accelerations measured at A and B. Prototype of the cam–roller–spring–rod isolator and experiment setup: (a) prototype and (b) experiment setup: 1—the vibration isolation system, 2—vibration exciter (S 51075-M TIRA GmbH), 3—vibration controller (Spider-81 Crystal Instruments), 4—power amplifier (B&K2718 Brüel& Kjær), 5—acceleration sensor A, and 6—acceleration sensor B.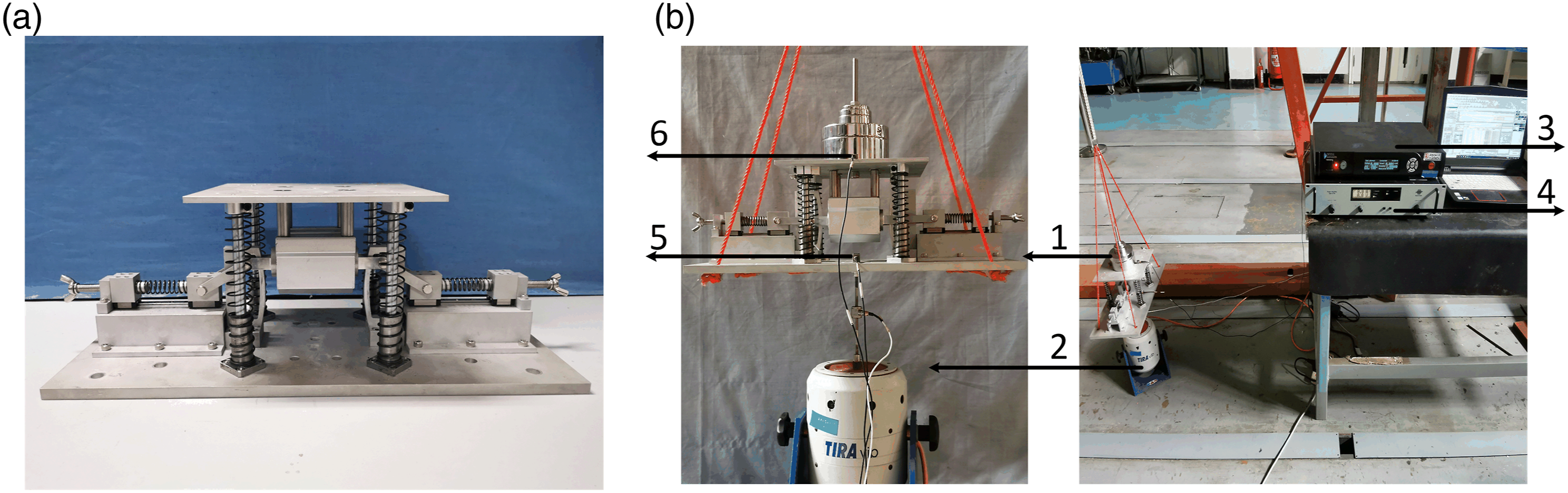
5.2. Experimental results
The linear model and Model 2 have high values of peak transmissibility. Considering the upper limit of relative displacement amplitude Experimental and simulation results of the models: (a) linear model and Model 2 and (b) cam–roller–spring–rod isolator and Model 1
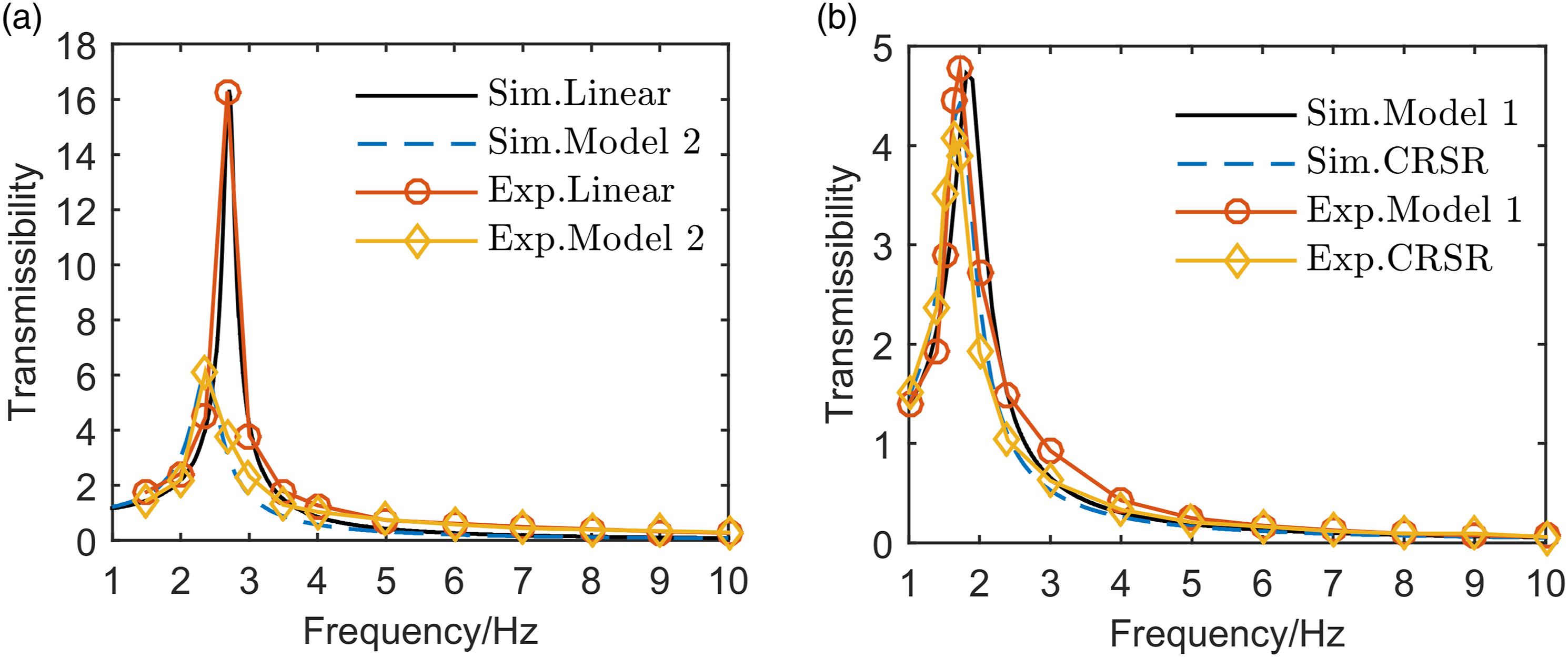
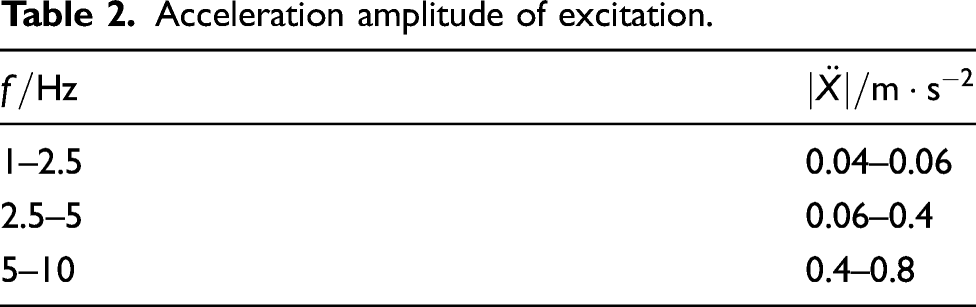
As seen in Figure 11(a), in the high frequency band, the experimental results are slightly higher than the simulation results. This can be explained by equation (43) that as the frequency increases, the displacement amplitude of the excitation will become smaller, which will result in a decreasing relative displacement between the base and the upper platform. Consequently, the negative stiffness effect will not be obvious, and the motion may even be affected by friction forces.
Acceleration amplitude of excitation.
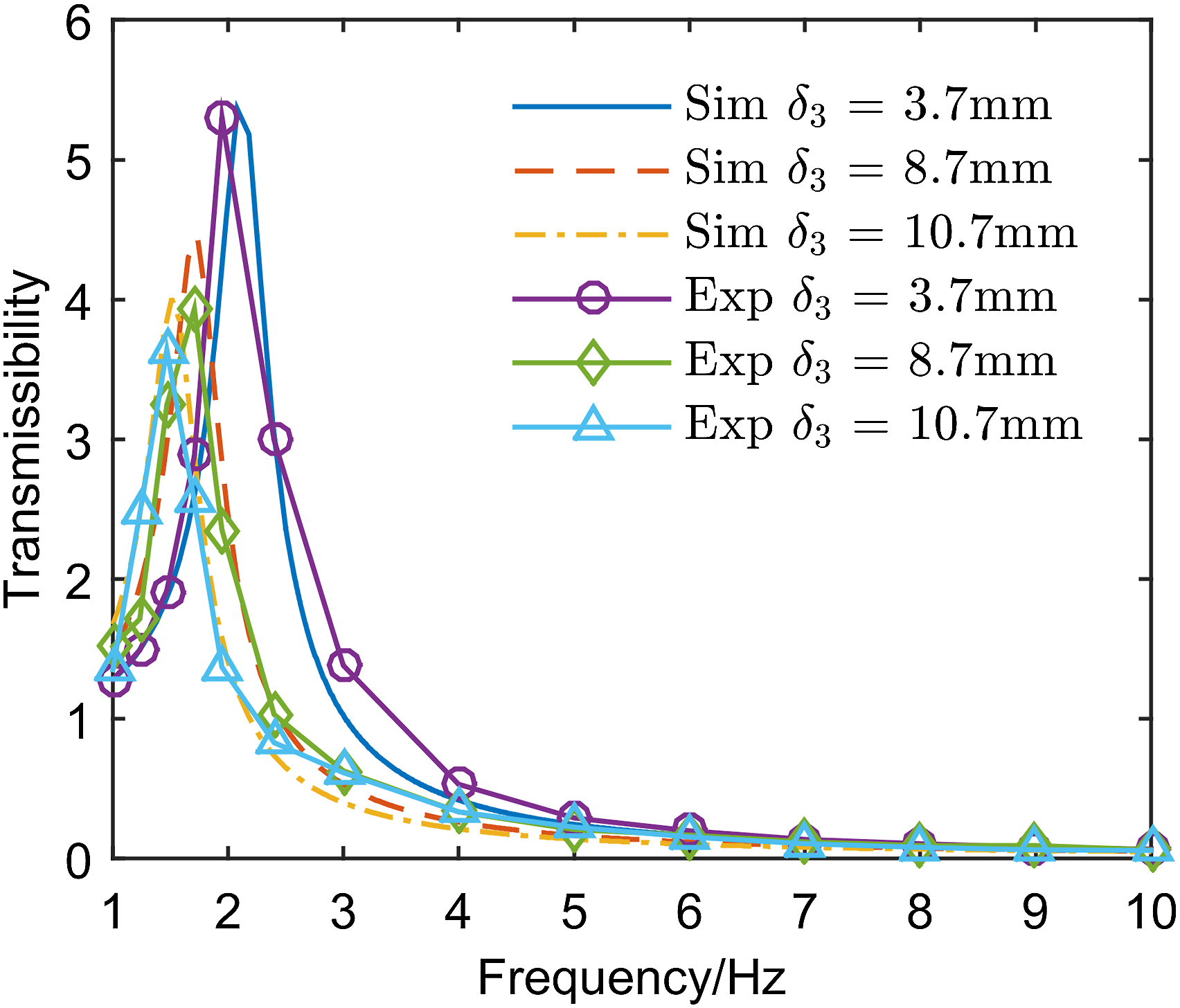
Experimental and simulation results of the cam–roller–spring–rod isolator with different
Comparison of isolation frequencies.
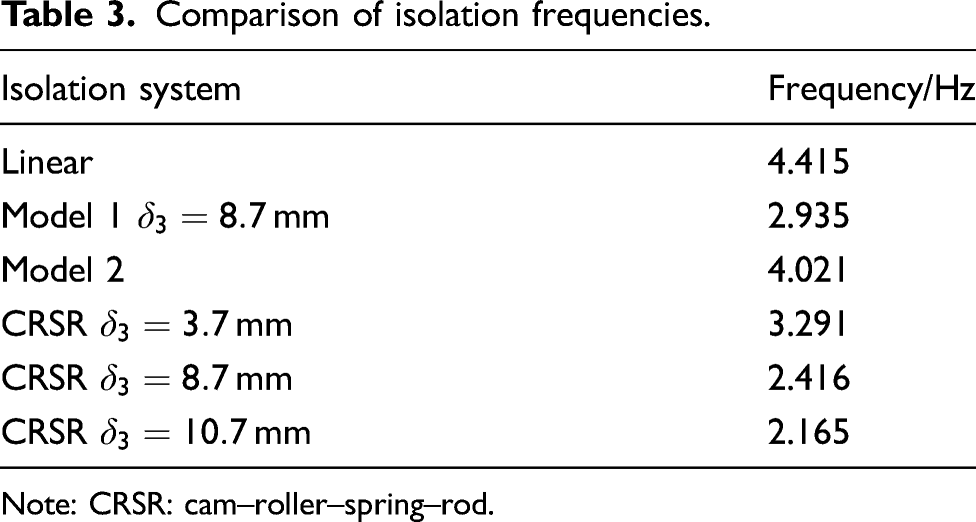
Note: CRSR: cam–roller–spring–rod.
6. Conclusions
A vibration isolation system with an HSLDS characteristic is proposed by combining a pair of cam–roller mechanisms and two spring–rod mechanisms (called CRSR for short) as an NSM. The static analysis is made to give the analytic expressions of restoring force and negative stiffness of the system, along with the contact and compression conditions for cam–rollers and springs. Then, the primary resonance of the system is solved by using the averaging method, and the jump conditions of the amplitude–frequency relation are derived. The proposed system is compared with some other vibration isolation systems from the aspects of the negative stiffness and absolute displacement transmissibility. The numerical and experimental studies indicate that the proposed system is superior to some other vibration isolation systems studied before.
The above studies show that the NSM can not only reduce the resonant frequency and resonant transmissibility of the cam–spring isolation system under high damping and small excitation amplitude but also alleviate the transmissibility jump of the slightly damped cam–spring isolation system under strong base excitation. Furthermore, adjusting the pre-compression of the spring can improve the vibration isolation performance. However, the selection of system parameters is also subject to multiple constraints, such as contact constraints and the upper bound of relative displacement. The optimization of the system parameters is the topic of our future work.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant number 11732006) and the Equipment Pre-research Foundation (grant number 6140210010202).