
Abstract
In this work, we present a numerical approach based on the shifted Legendre polynomials for solving a class of fractional optimal control problems. The derivative is described in the Atangana–Baleanu derivative sense. To solve the problem, operational matrices of AB-fractional integration and multiplication, together with the Lagrange multiplier method for the constrained extremum, are considered. The method reduces the main problem to a system of nonlinear algebraic equations. In this framework by solving the obtained system, the approximate solution is calculated. An error estimate of the numerical solution is also proved for the approximate solution obtained by the proposed method. Finally, some illustrative examples are presented to demonstrate the accuracy and validity of the proposed scheme.
Keywords
1. Introduction
Since approximately the year 2000, fractional calculus theory has gained substantial popularity and significance. It has tremendously attractive applications in diverse and widespread fields of physics and engineering, such as rheology, viscoelasticity, electromagnetic theory, diffusive transport, fluid flow, and electrical networks (Ali et al., 2020; Aydogan et al., 2020; Kilbas et al., 2006; Mainardi, 2010; Podlubny, 1999; Samko et al., 1993; Zaslavsky, 2005). Fractional order models are often more accurate than classical integer order descriptions because fractional order derivatives and integrals embed the description of the memory and hereditary properties of different substances (Baleanu and Mendes Lopes, 2019). These derivatives are useful in rheology as crucial features of cell rheological behavior (Djordjevic et al., 2003). Recently, many authors have modeled the dynamics of novel coronavirus (2019-nCov) with fractional derivative (see Ahmed et al., 2020; Hussain et al., 2020; Khan and Atangana, 2020).
The most important fractional operators (FOs) are the Riemann–Liouville (RL) and Caputo. Because a kernel of type local and singular exists in the definition of these operators, it is difficult or impossible to describe many nonlocal dynamic systems. Hence, many authors have introduced several definitions for fractional integral and derivative operators with the nonlocal and non-singular kernel such as Caputo–Fabrizio (CF) (Caputo and Fabrizio, 2015); Losada and Nieto, 2015) and Atangana–Baleanu (Atangana and Baleanu, 2016).
The optimal control theory is an area in mathematics which has been under development for years. The FOCPs as a development of the classical optimal control problems (OCPs) are getting more and more popular. In these problems, the dynamical system and (or) the objective function may be involved with FOs. For more details, see Bahaa (2017) and references therein.
An FOCP can be defined with respect to different definitions of FOs. In this work, we numerically investigate the FOCPs in which FO is defined in the AB derivative sense as follows

Subject to fractional dynamic system

And the initial condition

Orthogonal basis functions have been generally used to achieve approximate solution for many problems in various fields of science. Approximation of the solution using these functions is known as a useful tool in solving many classes of equations numerically, for example, differential equations (Ganji et al., 2020a; Jafari et al., 2019; Sadeghi et al., 2020), partial differential equations (Tajadodi, 2020; Tuan et al., 2020b), integro-differential equations (Ganji et al., 2020b; Jafari et al., 2021; Tuan et al., 2020a), and FOCPs (Heydari et al., 2020; Lotfi et al., 2011; Nemati, 2016) of various orders (fixed, fractional, or variable order).
The order of this article is as follows: In Section 2, we recall basic definitions of fractional operators. The main properties of the SLPs are presented in Section 3. Section 4 is devoted to proposing a numerical method for solving problems (1)–(3), while an error estimate of the numerical solution is discussed in Section 5. Section 6 includes some illustrative examples. Finally, we conclude the article in Section 7.
2. Basic definitions
The main aim of this section is to recall those definitions of the FOs which will be used further.
(See
Podlubny, 1999
) Let 0 < ω ≤ 1. The RL integral is defined as The RL integral of order ω satisfies the following property


(See Atangana and Baleanu, 2016). Let 0 < ω ≤ 1, x ∈ H1(0, 1) and AB(ω) be a normalization function such that AB(0) = AB(1) = 1 and 1. The AB derivative is defined as 2. The AB integral is given as It is easy to report that the AB integral satisfies the following properties (Abdeljawad and Baleanu, 2016; Abdeljawad, 2017; Abdeljawad and Baleanu, 2017): 1. 2. 3.



Let C[0, 1] be the space of all continuous functions defined on [0, 1] and f, g ∈ C[0, 1]. Then, the following inequality can be established

According to definition of the AB integral, we have Taking ɛ = α
ω
+ β
ω
, the proof is complete.
(See
Tajadodi, 2020
). Let 0 < ω ≤ 1. Then, we can rewrite the AB derivative by

3. The SLPs and operational matrices based on the SLPs
In this section, we present some of the main properties of the SLPs.
3.1. The SLPs
The explanation of the SLPs on [0, 1] is

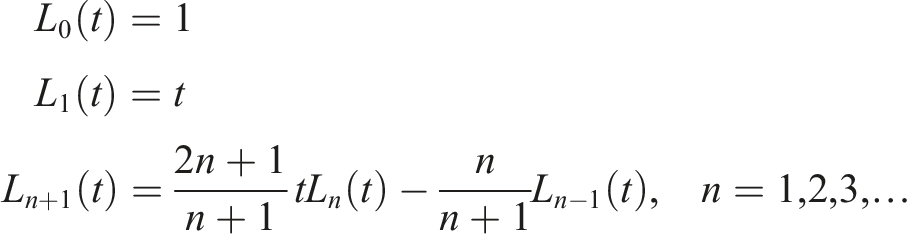
The analytic form of the SLPs of degree n is defined by

Where

The orthogonality property is satisfied for the SLPs as follows
For two arbitrary functions g, h ∈ L2[0, 1], the inner product and norm in this space are defined, respectively, by
Suppose that x(t) ∈ L2[0, 1]. Then, the function x(t) can be expanded in terms of the SLPs by

where

By taking only the first M + 1 terms in (8), x(t) can be approximated as


(See
Ganji et al, 2020b
). The OM of the product of the vector where

Suppose 0 < ω ≤ 1 and With

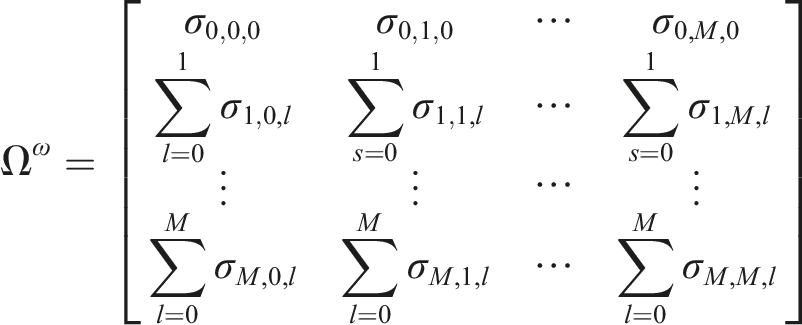
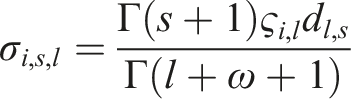
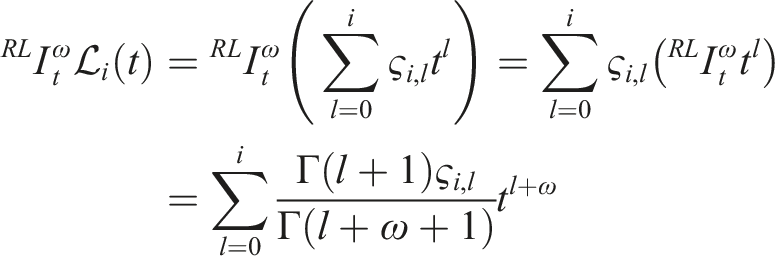
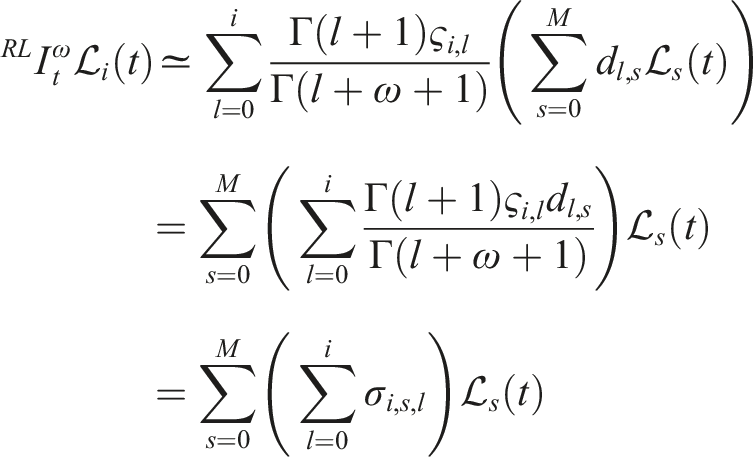
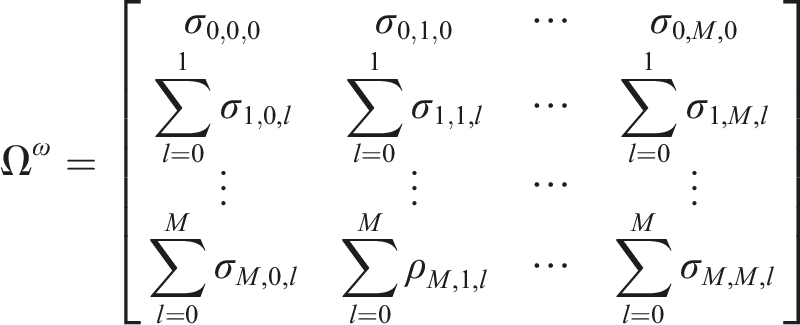
By applying the AB integral operator, Now, we must obtain the OM of RL integral of order ω. To do this, we apply the LR integral operator, By approximating the function tl+ω in terms of the SLPs, we have In view of (13) and for i = 0, 1, …, M, we get Therefore, for i = 0, 1, …, M, we can write Where With



4. Numerical method
Here, we present a numerical method for solving the FOCP (1)–(3). For this purpose, first we approximate

By taking the AB integral of (15) and using the initial condition, we have


We expand the variable t and the function y(t) in terms of the SLPs as

By substituting (16) and (17) into the performance index, we obtain

Now, we approximate the functions ξ(t) and η(t) as

According to the product operational matrix of the shifted Legendre basis and using (16), (17), and (19), we can write
Then, using (15) and (20), the dynamic system given by (2) is converted to

Moreover, according to the Lagrange multiplier for minimizing (18) subject to the condition given in (21), we define


In view of (23), we have a system of nonlinear algebraic equations. The unknown parameters of the vectors X, Y, and λ are computed by solving this system. Finally, approximations of the optimal control and corresponding state functions are given by (16) and (17), respectively.
5. Error bound
The Sobolev norm of integer order μ ≥ 0 in the interval (a, b) is given by
(See
Canuto et al,. 2006
). Let μ ≥ 0 and x ∈ H
m
(−1, 1). Suppose that where


(See
Ganji et al., 2020b
). Let

Suppose μ ≥ 0 and x ∈ H
μ
(0, 1). Let And Where


With the help of Lemma 2, we obtain By definition The proof is complete. In a similar way, we obtain where



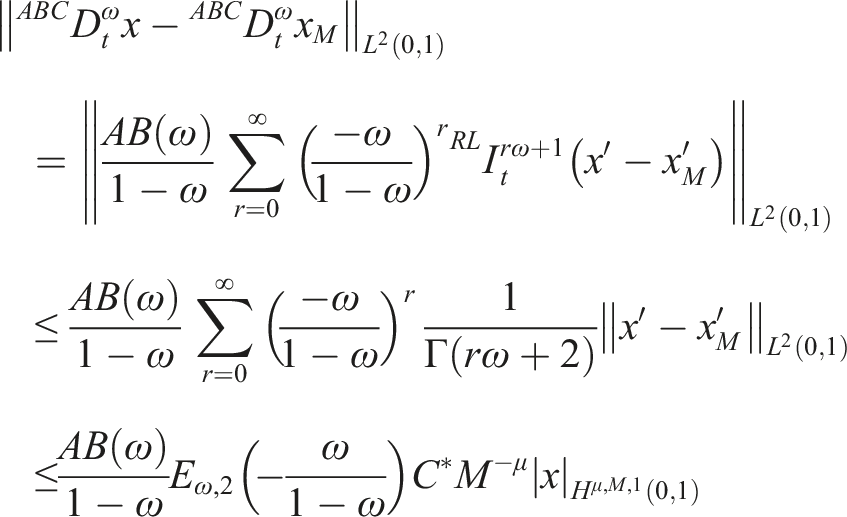
Suppose that 0 < ω ≤ 1 and x ∈ H
μ
(0, 1) satisfies in Theorem 5. Then
By using Theorems 2 and 5, we get
Suppose that μ ≥ 0 and x, y ∈ H
μ
(0, 1) satisfy in Theorems 5 and 6. Let F satisfies the Lipschitz conditions with the constant L and
According to (1), we have

6. Test examples
This section includes some illustrative examples which show the accuracy and efficiency of the proposed method.
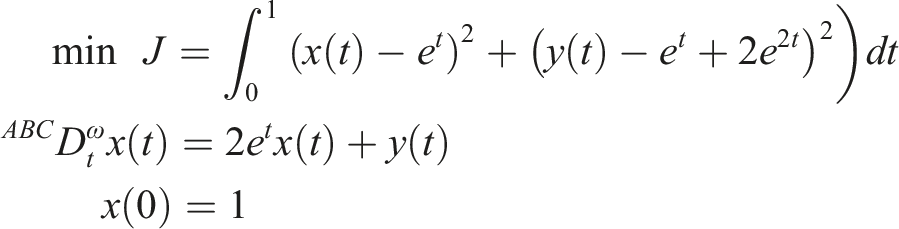
Consider the following FOCP
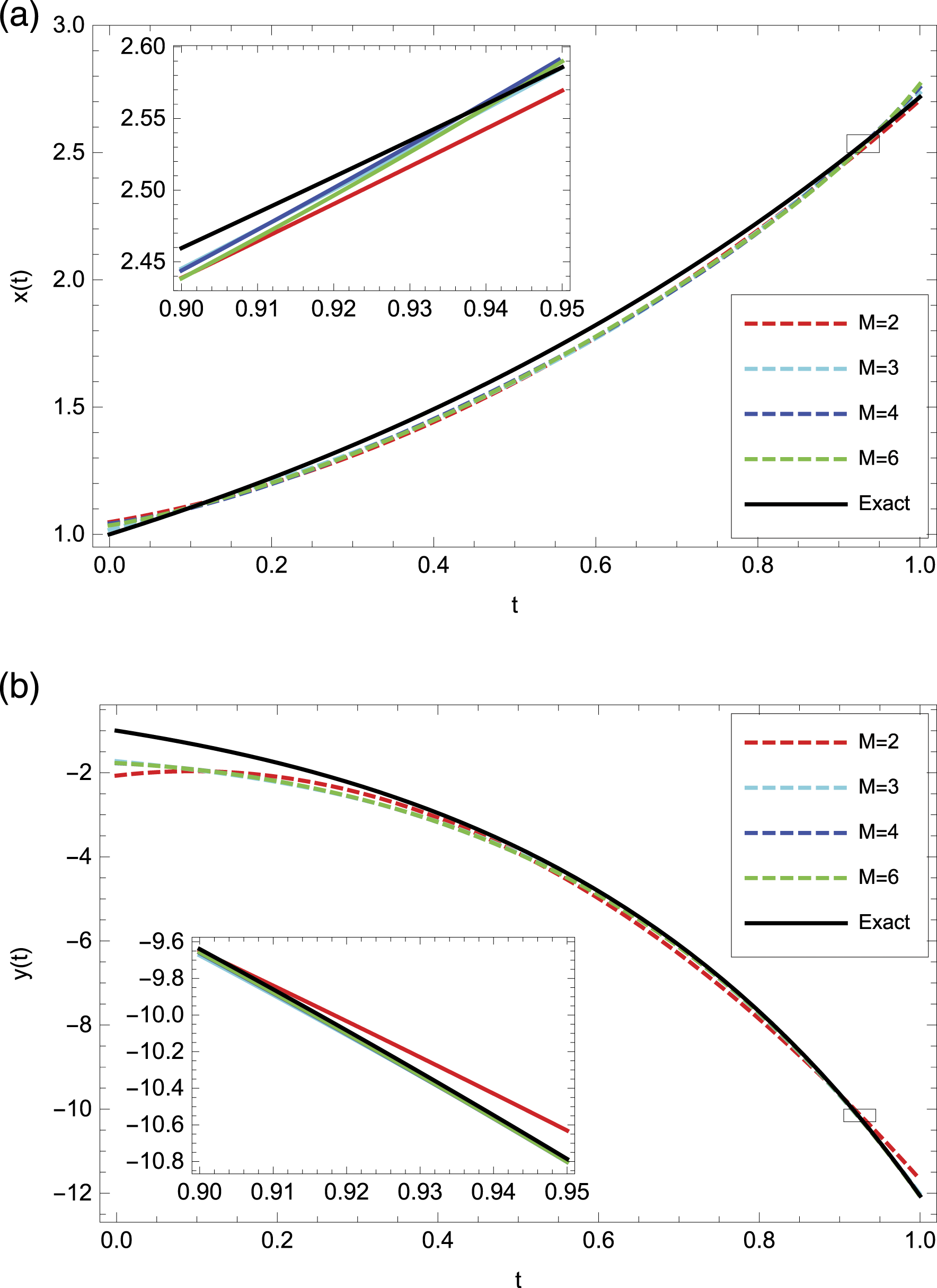
(Example 1) (a) The exact and approximate solutions (x(t)) and (b) the exact and approximate solutions (y(t)) and M = 5.
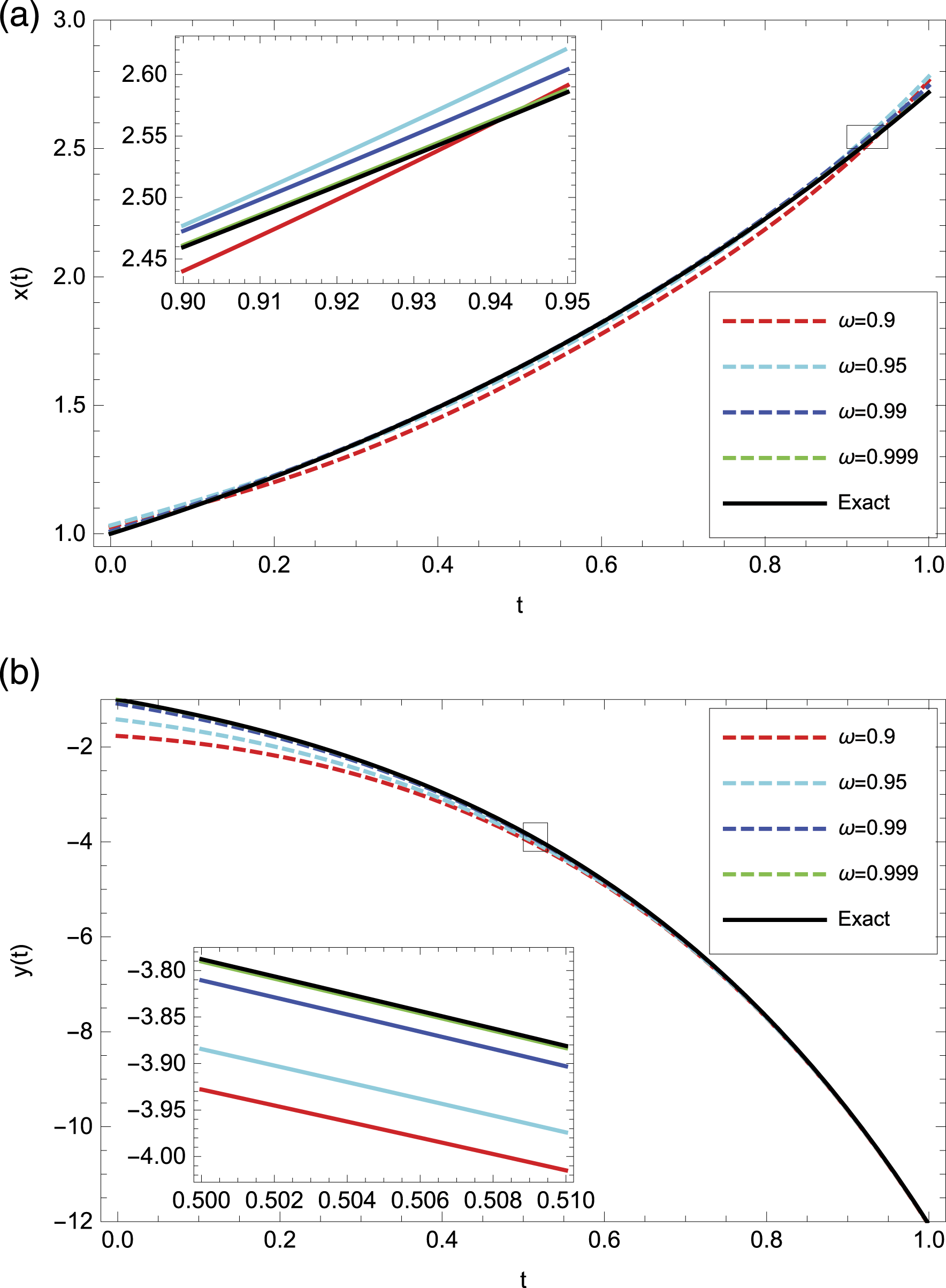
(Example 1) (a) The exact and approximate solutions (x(t)) and (b) the exact and approximate solutions (y(t)) and ω = 0.9.
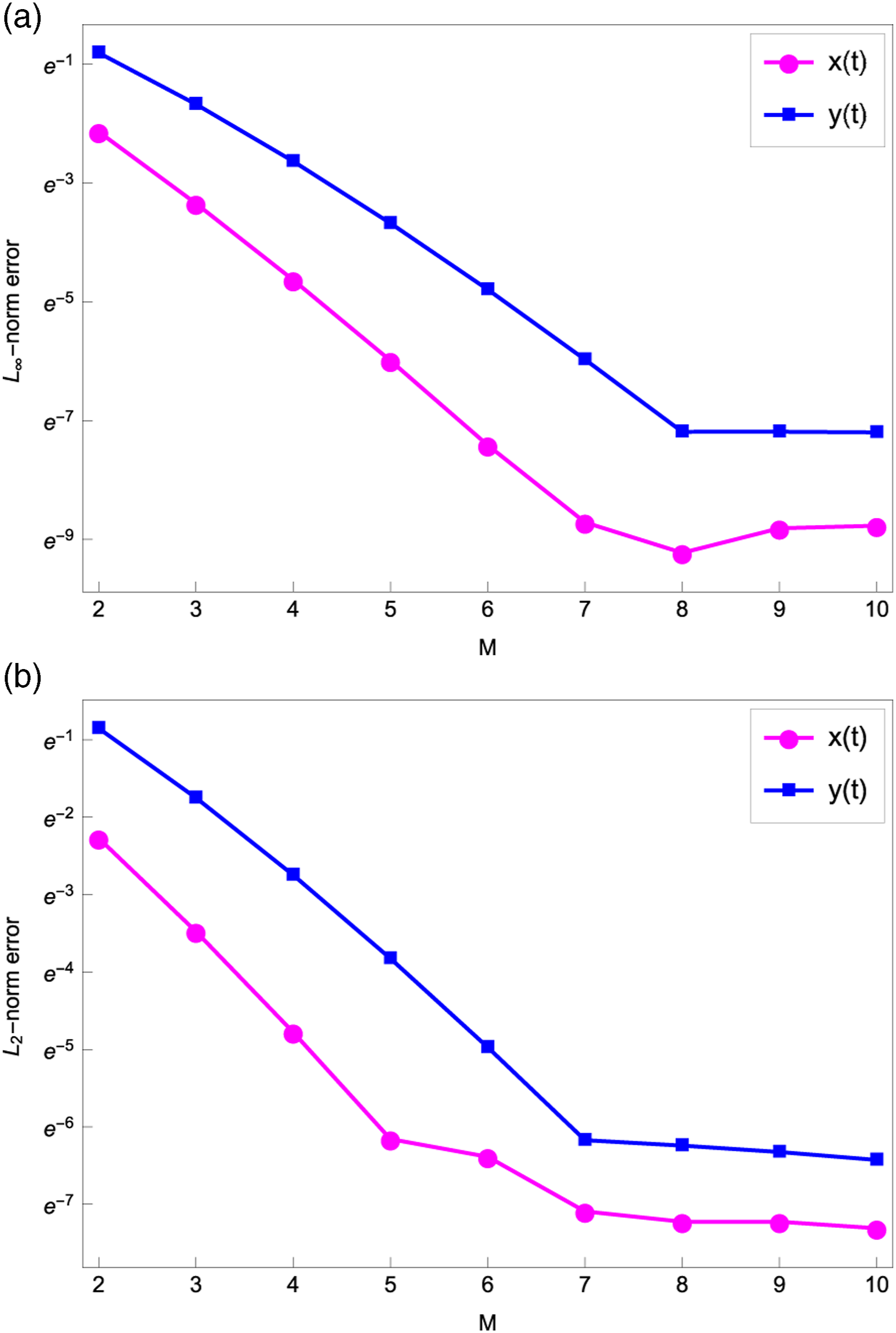
(Example 1) Comparison of (a) L ∞ -norm error and (b) L2-norm error by different values of M and ω = 1.
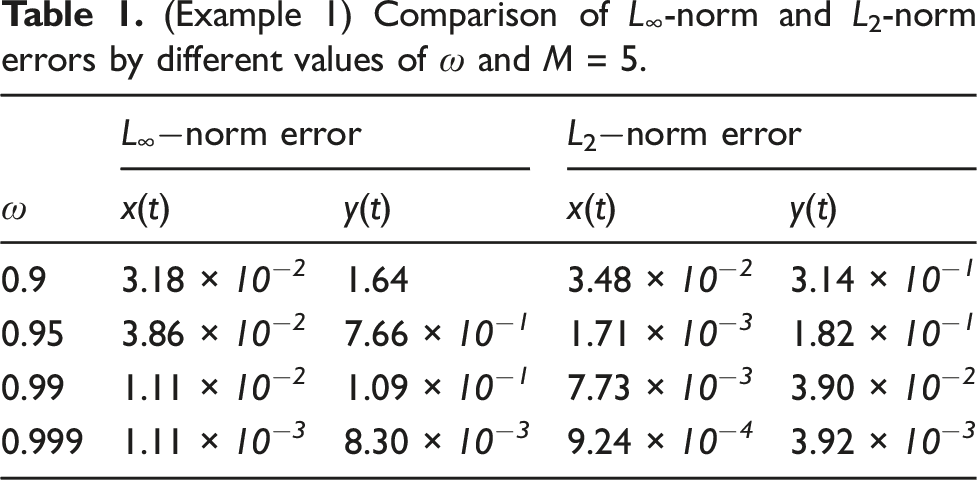
(Example 1) Comparison of L ∞ -norm and L2-norm errors by different values of ω and M = 5.
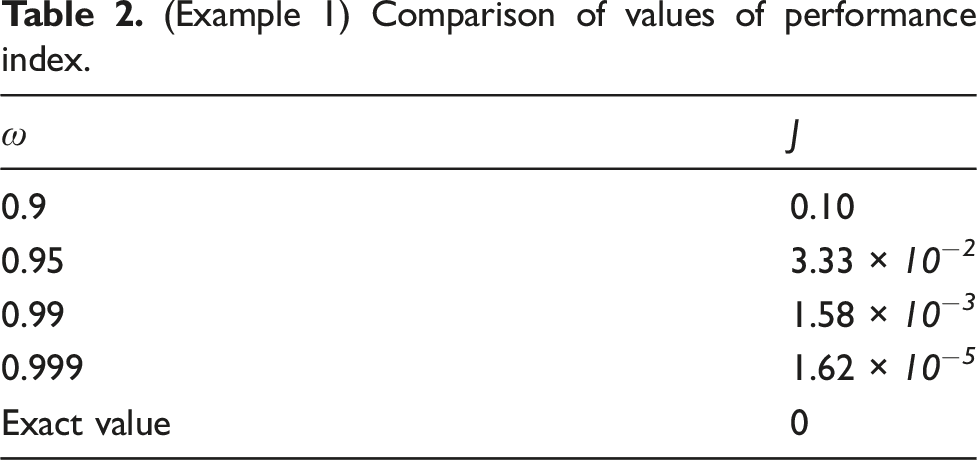
(Example 1) Comparison of values of performance index.
(See
Lotfi et al., 2011
;
Nemati, 2016
;
Oh and Luus, 1989
). Consider the following FOCP With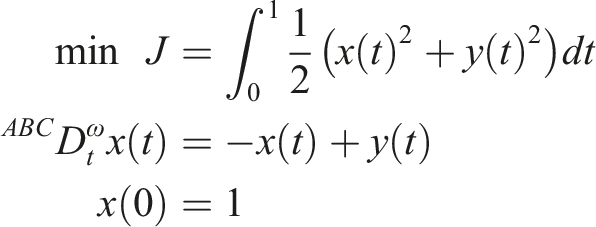

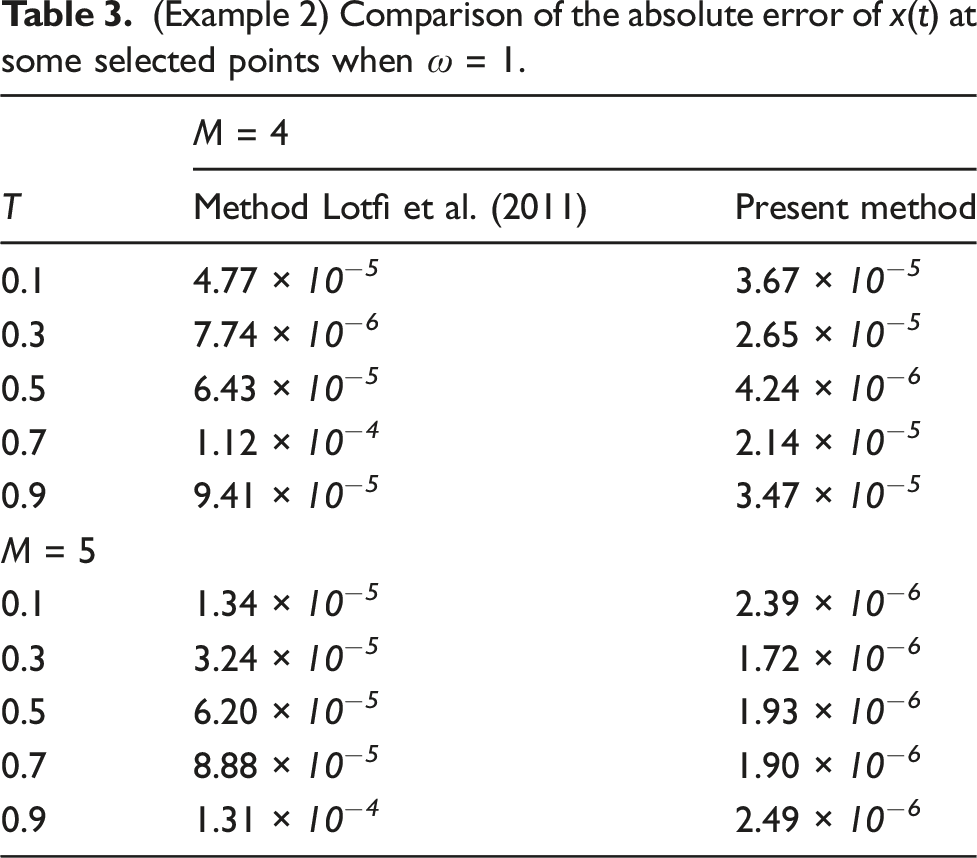
(Example 2) Comparison of the absolute error of x(t) at some selected points when ω = 1.
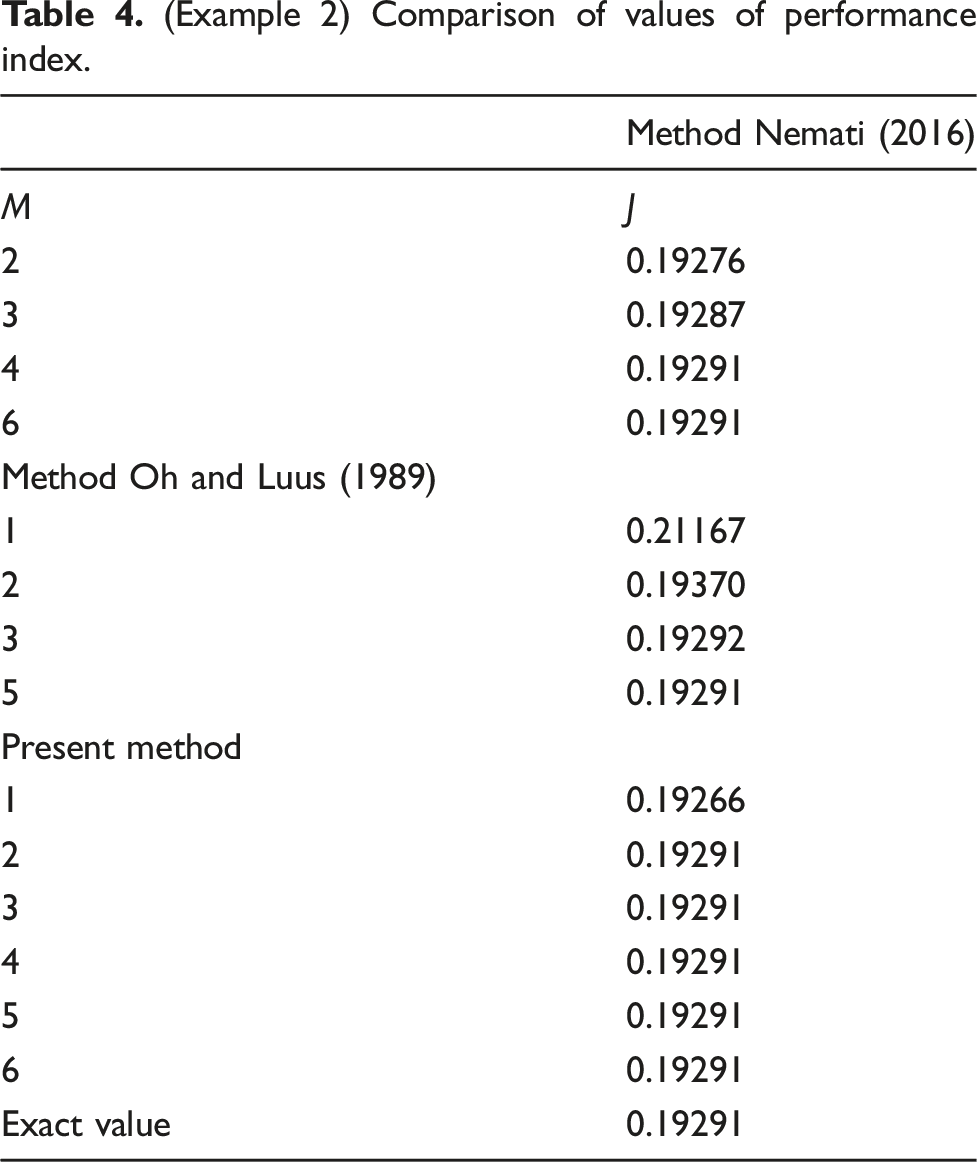
(Example 2) Comparison of values of performance index.
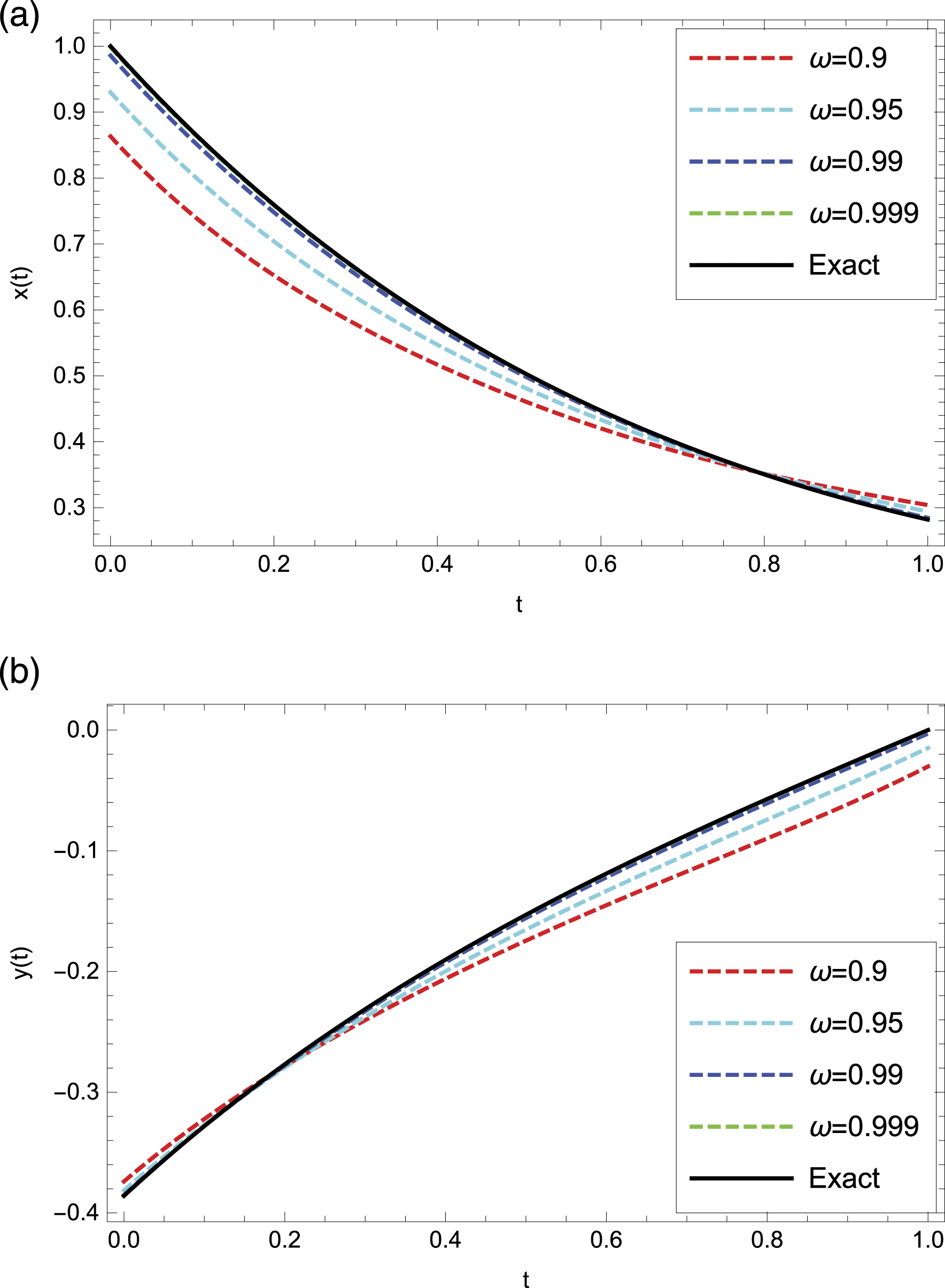
(Example 2) (a) The exact and approximate solutions (x(t)) and (b) the exact and approximate solutions (y(t)) and M = 5.
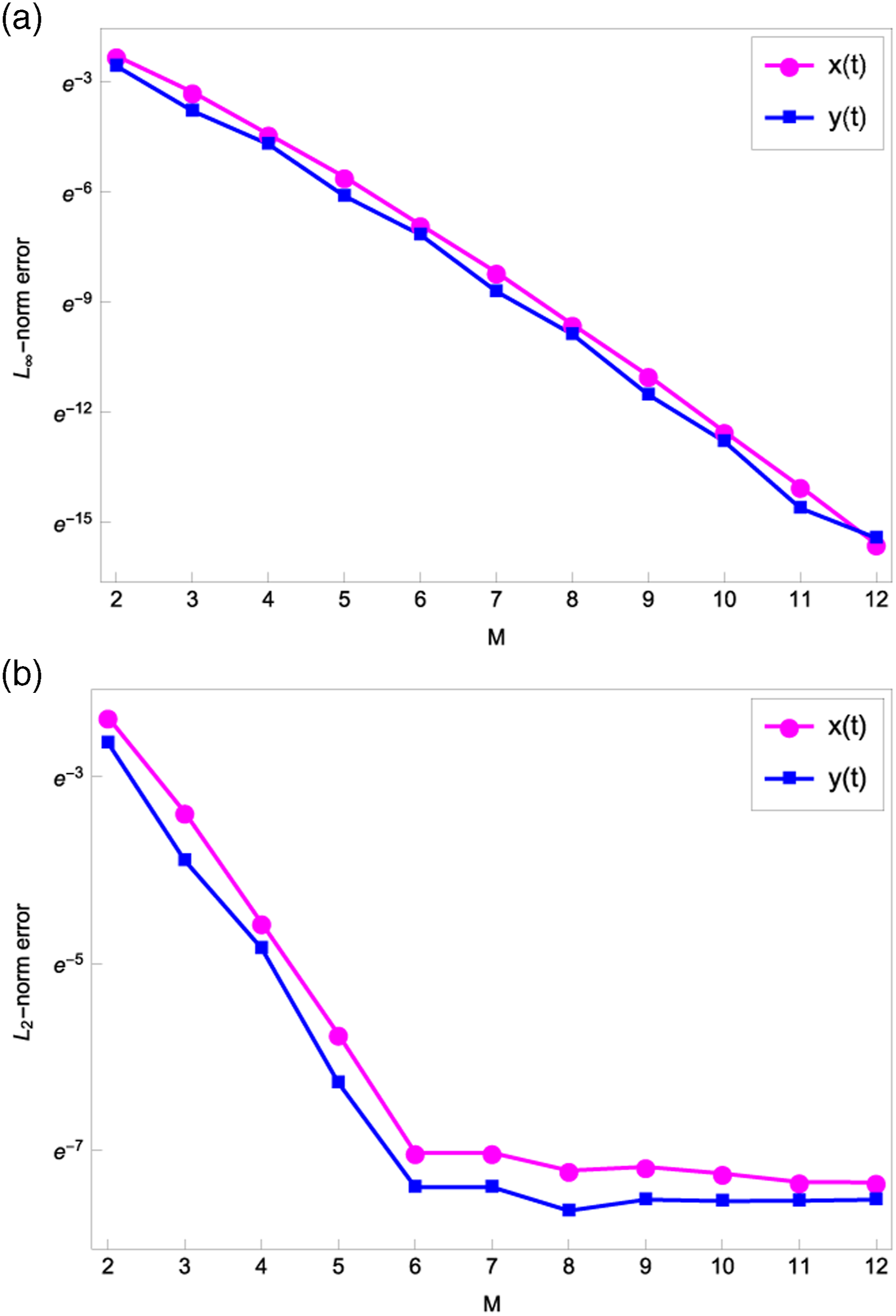
(Example 2) Comparison of (a) L ∞ -norm error and (b) L2-norm error by different values of M and ω = 1.
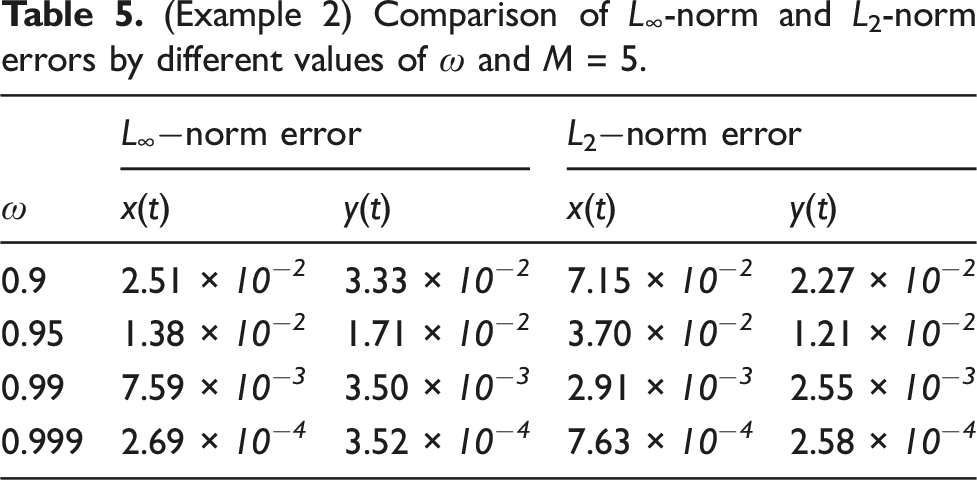
(Example 2) Comparison of L ∞ -norm and L2-norm errors by different values of ω and M = 5.
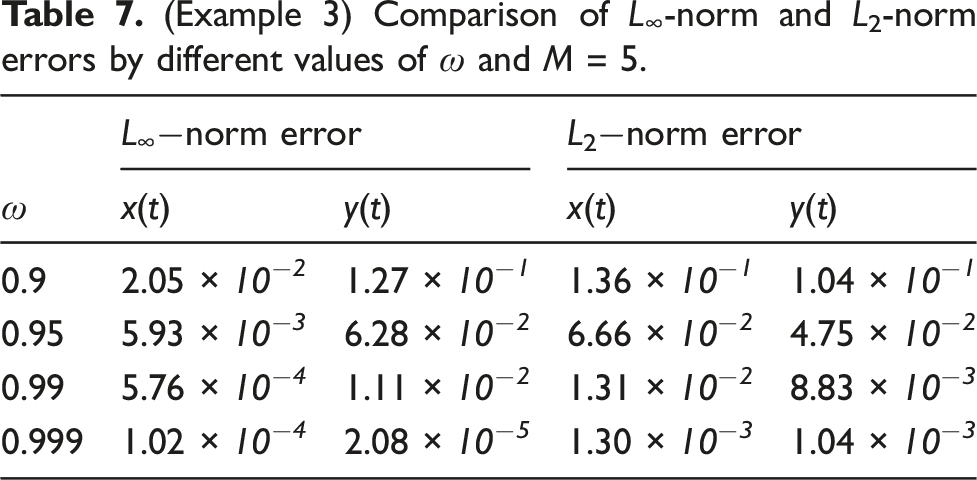
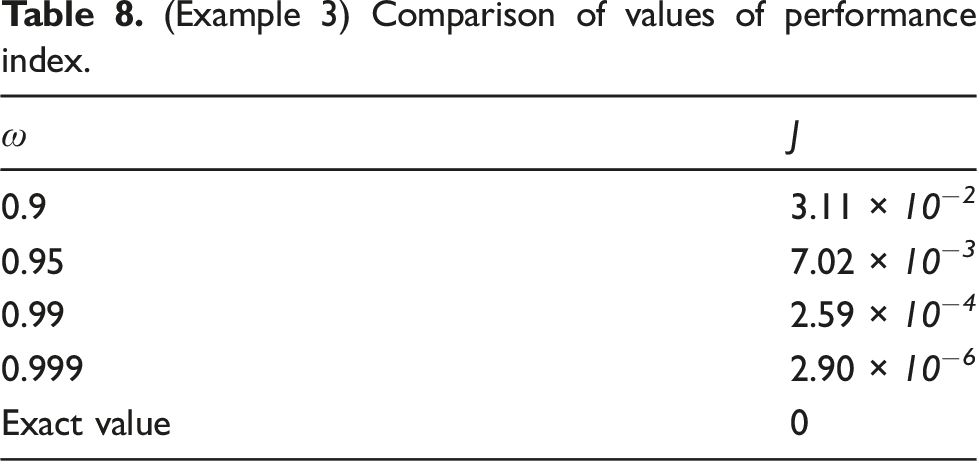
Consider the following FOCP
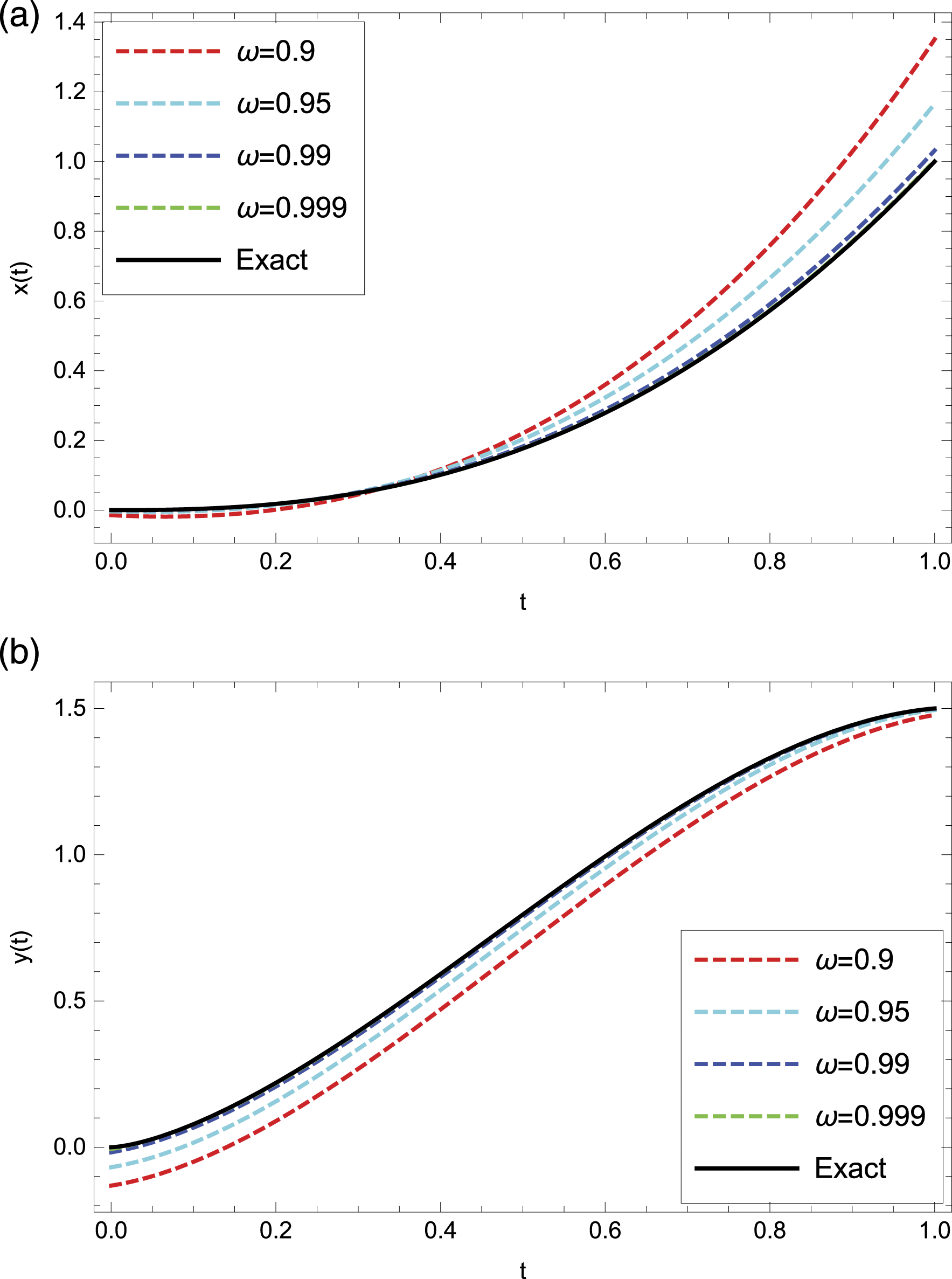
(Example 3) (a) The exact and approximate solutions (x(t)) and (b) the exact and approximate solutions (y(t)) and M = 5.
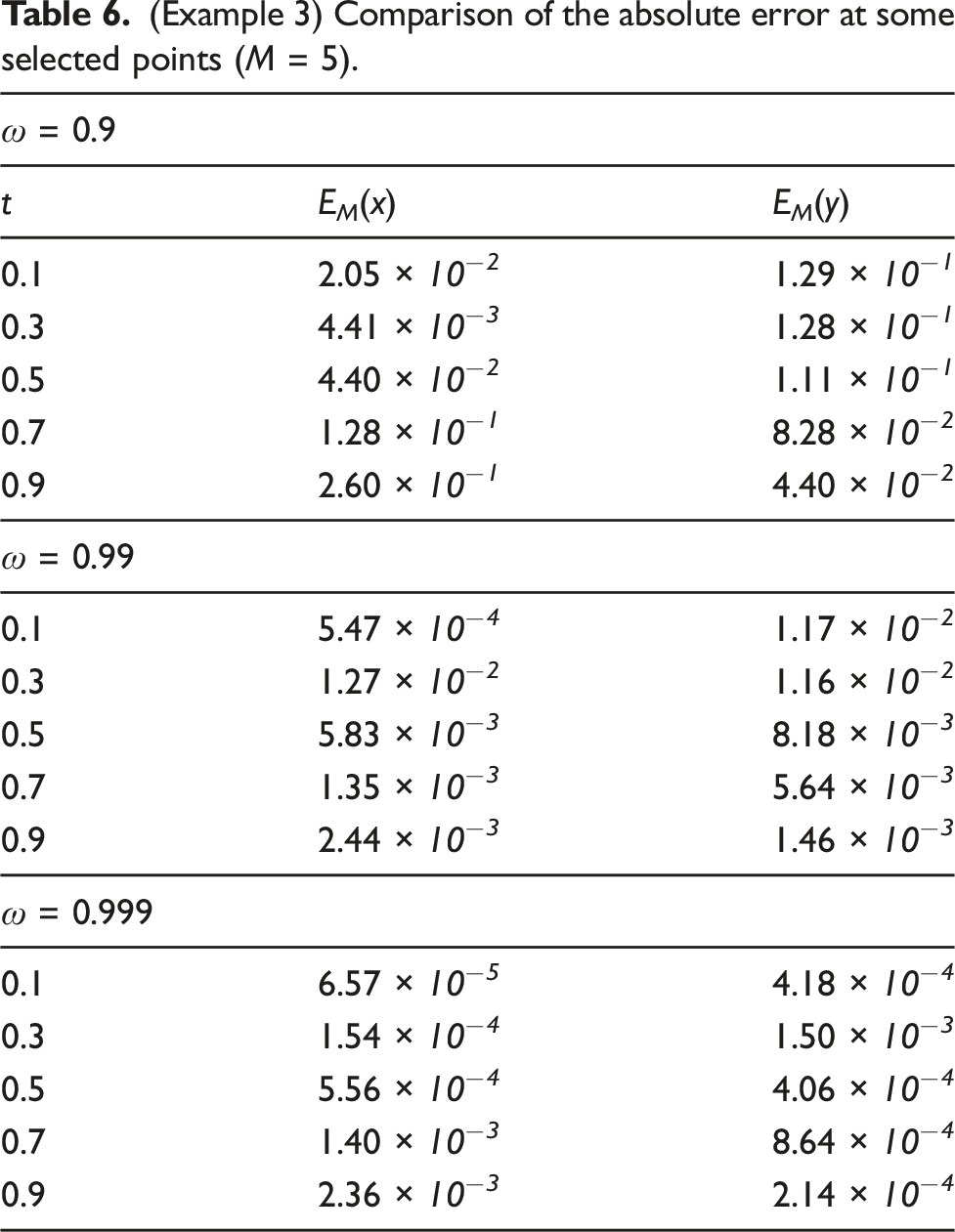
(Example 3) Comparison of the absolute error at some selected points (M = 5).
(Example 3) Comparison of L ∞ -norm and L2-norm errors by different values of ω and M = 5.
(Example 3) Comparison of values of performance index.
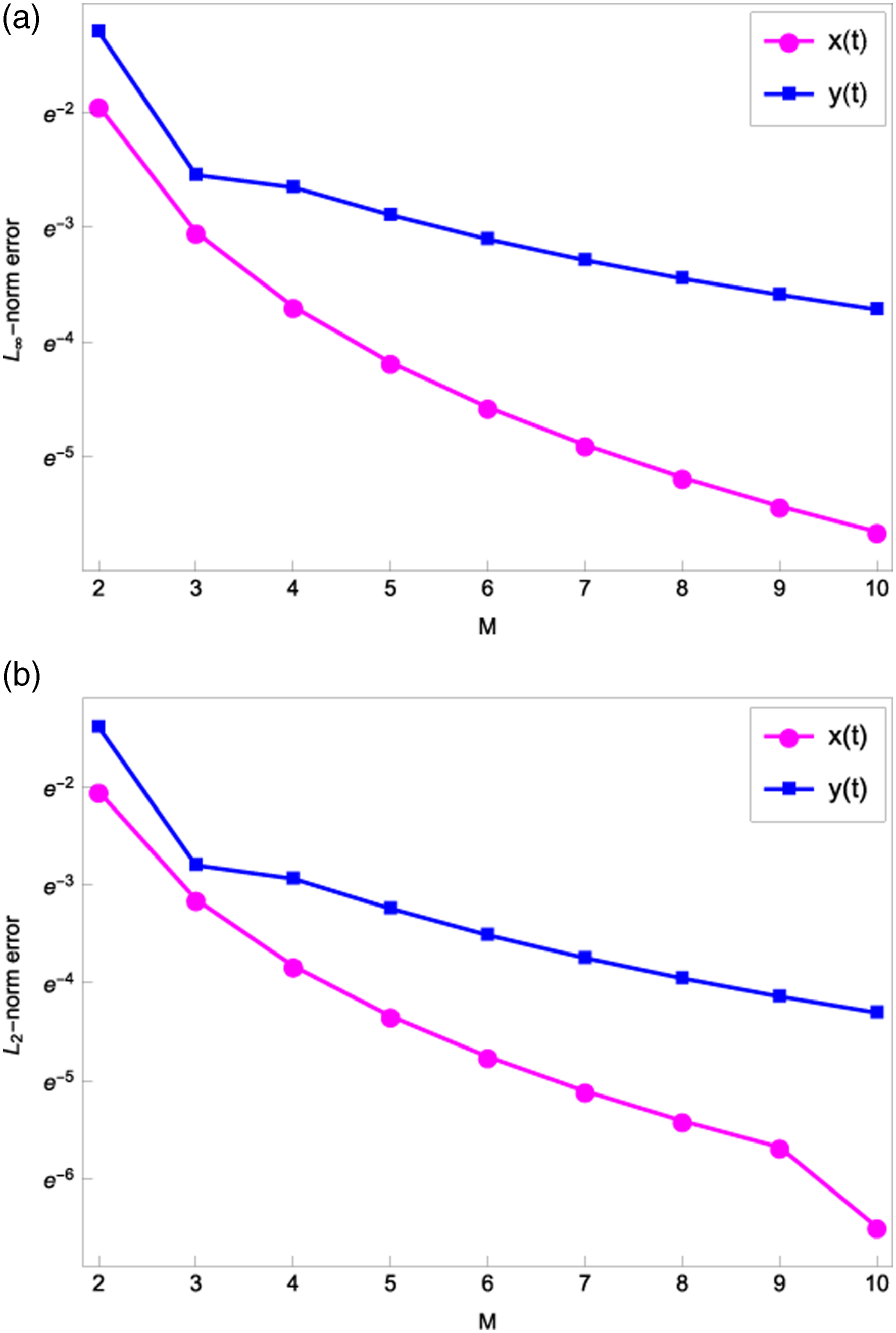
(Example 3) Comparison of (a) L ∞ -norm error and (b) L2-norm error by different values of M and ω = 1.
7. Conclusion
In this article, we have put forth a new numerical method for solving the fractional optimal control problems. By the definition of the Atangana–Baleanu integral operator and properties of the shifted Legendre polynomials (SLPs), the operational matrices of fractional integration and product have been presented. The approximation of the unknown function and its derivative in terms of the SLPs allow us to reduce the FOCPs to a set of nonlinear algebraic equations which greatly simplifies the problem. Then, an error analysis of this scheme has been given. Moreover, several examples have been presented to demonstrate the accuracy and efficiency of the proposed method. The numerical results show that the theoretical findings are in accordance with numerical experiments, and that the proposed algorithm is superior to others available in the literature. Finally, it seems that the global convergence and asymptotic stability of variable order FOCPs can be examined as further works for different type of fractional derivative.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.