
Abstract
This study proposes an adaptive nonsingular integral dynamic terminal sliding mode tracker/synchronizer for disturbed nonlinear systems along with its usage in safe communication systems. The convergence of the closed-loop structure under unknown uncertainty and disturbances is guaranteed via Lyapunov analysis. Furthermore, a parameter-tuning method is planned to approximate the upper bound of uncertainty and disturbance terms, since this latter is typically unknown in practice. The proposed approach is used to design a digital secure transmission scheme according to the chaotic systems. The effectiveness of the suggested approach is validated using computer simulations on a benchmark example of chaotic system. The obtained outcomes clearly confirm the ability of the planned control approach enables to attain the desired tracking/synchronizing performance despite the disturbances. Additionally, when implemented to the data encryption of a communication system, the proposed control and secure communication techniques enabled the complete and secure retrieval of the original digital sequences.
Highlights
This article recommends a finite-time chaos synchronization method based on the nonsingular adaptive second-order integral-type sliding mode control for nonlinear systems subject to external disturbances and parametric uncertainties. The proposed approach is used to design a digital secure transmission scheme based on the chaotic systems. Its chief innovations are listed as follows: a design scheme is proposed to combine the robustness of SMC with the low cost and security features of chaotic systems and a design method is presented that is robust to uncertainties and parameter variation, simple to be constructed, and there is no necessity to the information of upper bounds of uncertainties.
1. Introduction
Nonlinear systems such as chaotic systems were shown to have many useful applications in many engineering systems such as chemical reactors (Berezowski, 2020), genetic control systems (Azar and Vaidyanathan, 2015), power converters (Lv et al., 2019), lasers (Bao et al., 2020), biological systems (Justin et al., 2020), permanent-magnet motors (Lu and Wang, 2020), and secure communication systems (Chan et al., 2020; Xiu et al., 2021b). The control (Ouannas et al., 2020), tracking, or synchronization (Godavarthi et al., 2020; Ma et al., 2021) of these systems has a vital role in the engineering applications. However, disturbances and system uncertainties are ubiquitous in any engineering system (Li et al., 2021b; Mirrezapour et al., 2021). Hence, their effect should be taken into account when analyzing the system efficiency. A number of approaches were proposed in the former decades for control of the systems with disturbances and uncertainties (Koronovskii et al., 2020; Trikha et al., 2021; Yadav et al., 2019; Yan et al., 2021). Sliding mode control (SMC) is known to be one of the most efficient robust controller design techniques (Hu et al., 2021; Li et al., 2021a; Modiri and Mobayen, 2020; Mofid and Mobayen, 2022; Roopaei and Zolghadri Jahromi, 2008; Wang et al., 2021a). It is widely used in tracking/controlling nonlinear uncertain systems. Its robustness against uncertainties, ability to completely reject matched disturbances, as well as its simple design and simplicity of execution are amongst its main characteristics (Mobayen et al., 2020; Goel and Mobayen, 2021). The design of SMC consists of two phases (Wang et al., 2021b; Zhu et al., 2021): the design of switching manifold and the control input design. The sliding surface is frequently planned to attain the wanted dynamics of control system. The control input is designed to force the sliding mode, that is, direct the system states to the sliding surface in the finite time (Fu and Ma, 2020; Perruquetti and Barbot, 2002; Wang et al., 2021c). Chattering, however, is recognized as the main problem when implementing first-order SMC. Second-order SMC was shown to alleviate this problem by using an integrator term in the input of conventional first-order SMC, thus making the real controller input and its derivative clearly appear. As an alternative to acting on the first-order SMC surface time derivative, the discontinuous term incomes on its second-order derivative. Therefore, the real controller signal is a continuous integration term of its derivative, and the chattering problem is removed. This process refers to the second-order SMC design (Kchaou et al., 2017; Matraji et al., 2018; Muñoz et al., 2017).
Chaotic systems have recently received great attention in data encryption and secure communication systems due to their nonlinearity features and interesting behaviors (Asgari-Chenaghlu et al., 2021; Balamash et al., 2020; Chen et al., 2020; Hanif et al., 2020; Wu et al., 2021). Among the most relevant features of chaotic sequences is the close similarity of their behavior to that of noise. This characteristic can be applied to design digital data encryption systems (Nguyen et al., 2020; Moradi Zirkohi and Shoja-Majidabad, 2021; Zarebnia et al., 2019; Zong et al., 2020). Chaotic-based encryption techniques use chaotic sequences and signals made by nonlinear chaotic systems to encrypt systems (Hsiao and Lee, 2015; Liu et al., 2016; Mazloom and Eftekhari-Moghadam, 2009). It is worth noting that though ordinary encryption methods can meet the security of digital message information through transmission, there are some restrictions to protecting the content of all digital messages and barricading illegal access. Additionally, researches have shown that these techniques cannot display good performance against attacks, in some applications, due to lower key space (Vaseghi et al., 2017). Moreover, conventional encryption methods entail long computational time and require high computing power (Lv et al., 2019). Additionally, they lead to significant latency in practice as a result of low speed of encryption/decryption. Consequently, cryptography based on chaotic signals and sequences provide better alternative than the traditional encryption methods, specifically in terms of ensuring a suitable mixture of security, capability, and speed. According to the above discussion, designing secure digital communication system by means of SMC-based synchronized nonlinear systems can combine the low cost and security of chaotic sequences with the noteworthy features of SMC and properly solve the security problem in digital data transmission systems.
This article recommends a chaos tracking/synchronization method based on nonsingular adaptive integral sliding control for nonlinear systems subject to disturbances and uncertainties with unknown upper bounds. The proposed approach is used to design a digital secure transmission scheme based on chaotic systems. Its chief innovations are listed as follows: a design to combine the robustness of SMC with the low cost and security features of chaotic systems; a design that is robust to uncertainties and parameter variation and simple to be constructed; and a design that does not need any information for the upper bounds of uncertainties.
The paper remainder is set as follows: The explanation of the system and required preliminaries are given in Section 2. The main outcomes including the integral sliding surface, terminal sliding mode tracker design, and estimation-based control for synchronizing the nonlinear chaotic systems are detailed in Section 3. Section 4 highlights the successful implementation of the planned controller approach to secure communication systems. The numerical results are given in section 5. Concluding remarks are finally provided in section 6.
2. System definition and preliminaries
Consider the subsequent nonlinear system with disturbance (Mondal and Mahanta, 2014)

The nonlinear functions
The system uncertainty


(Razzaghian et al. (2021)): The matrices The main control aim is to guarantee that the system output follows a desirable reference trajectory The tracking error signal is defined as To fulfill the above control objectives for system (1), we propose in the paper to design a nonsingular second-order terminal sliding tracker control signal with a rapid reaching condition.


Consider the subsequent time-invariant nonlinear dynamics: Assume that the subsequent circumstances are fulfilled: (I) The equilibrium point is asymptotically stable in the subset (II) The equilibrium is finite-time convergent in Then, the equilibrium is locally finite-time stable. In addition, if

The affine nonlinear dynamics is considered as:

(Xiu and Guo, 2018) Let

3. Main results
3.1. Design of the sliding manifold
To ensure the tracking control design purpose, define the subsequent integral terminal sliding surface

When the tracking error reaches the terminal switching surface

Thus, we have,

Define the following Lyapunov function

Computing the time derivative of

This implies the uniform bounded of the error signal and its asymptotic convergence to the origin, once the error trajectory reaches the sliding surface (9). Additionally,
3.2. Tracking controller design
To ensure that the sliding surfaces are converged to the origin, consider the subsequent surface



The sliding surface (14) results in a faster decay rate than (7) and hence speeds up the dynamic response of the system. Assuming the subsequent initial conditions for functions (15) and (16)


Further, the boundary condition of (15) and (16) is given by


The parameters


Using the sliding surface (14), the reaching interval of the sliding surface is removed. Since Deriving (14) with respect to time gives



Considering system (1) and forming the control input as


The Lyapunov functional is constructed by From (15), (16), and (25), the term Calculating the time derivative of (29) gives





3.3. Adaptive tracker design
Practically, the upper bound of uncertainty and disturbances
The disturbed nonlinear system (1) and the dynamic terminal sliding manifold (14) are considered. Assume that the perturbation terms are bounded with unknown upper bound. Defining the following adaptive terminal sliding tracker:


Consider the estimator error defined by From time derivative of (3) and employing (34) yields The Lyapunov function is constructed by Using (25), (36), and (38), one obtains Because Thus, confirming the gradual decrease of the Lyapunov function (37) and the convergence of terminal switching manifold to origin. □







By employing the dynamic terminal sliding mode control law (33) for the disturbed nonlinear system (1), the finite-time convergence of terminal switching manifold (14) is not fulfilled. Hence, via the adaptive control input (33) in Theorem 2, the Lyapunov function (37) is decreased gradually and the convergence of dynamic terminal sliding surface (14) is guaranteed.
4. Application to secure communication
Chaotic secure communication systems contain a master nonlinear chaotic system in the transmitter and a slave nonlinear chaotic system in the receiver. Chaotic Shift, Parametric Modulation, Chaotic Masking, Keying, and the Inclusion methods are among the most popular techniques applied for chaotic cryptosystems. In the chaotic masking, the message data
In this regard, the nonlinear chaotic system in the transmitter side can be considered as Block diagram of planned chaotic cryptosystem.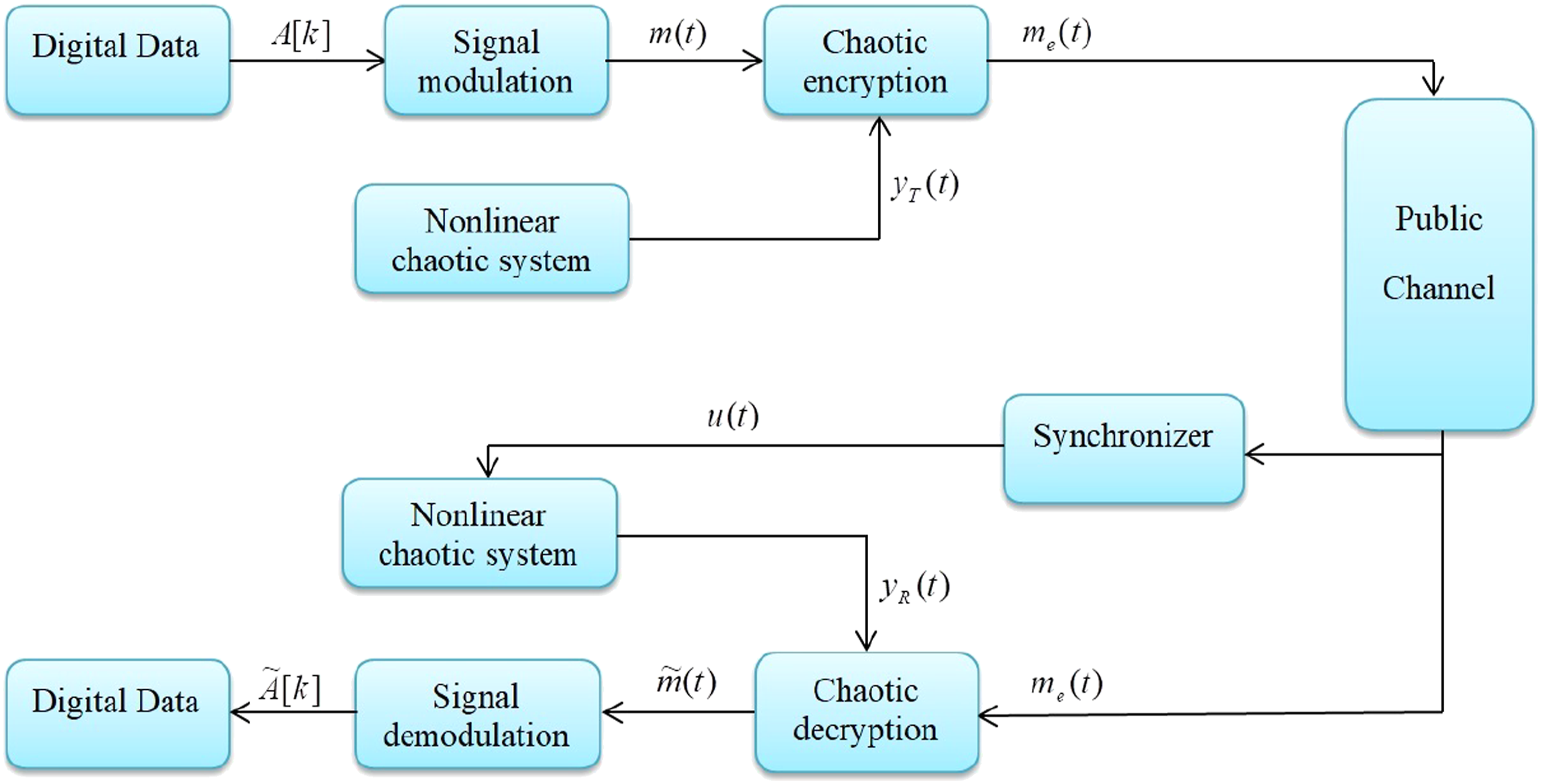


In the proposed chaotic cryptosystem,
5. Numerical simulation
This portion illustrates the performance of recommended scheme. To this end, consider the differentiable function
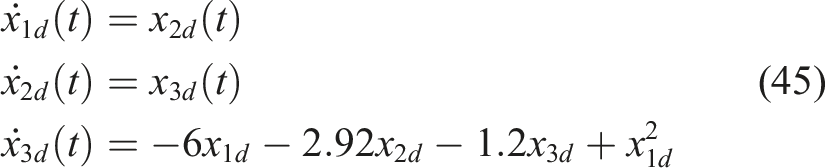
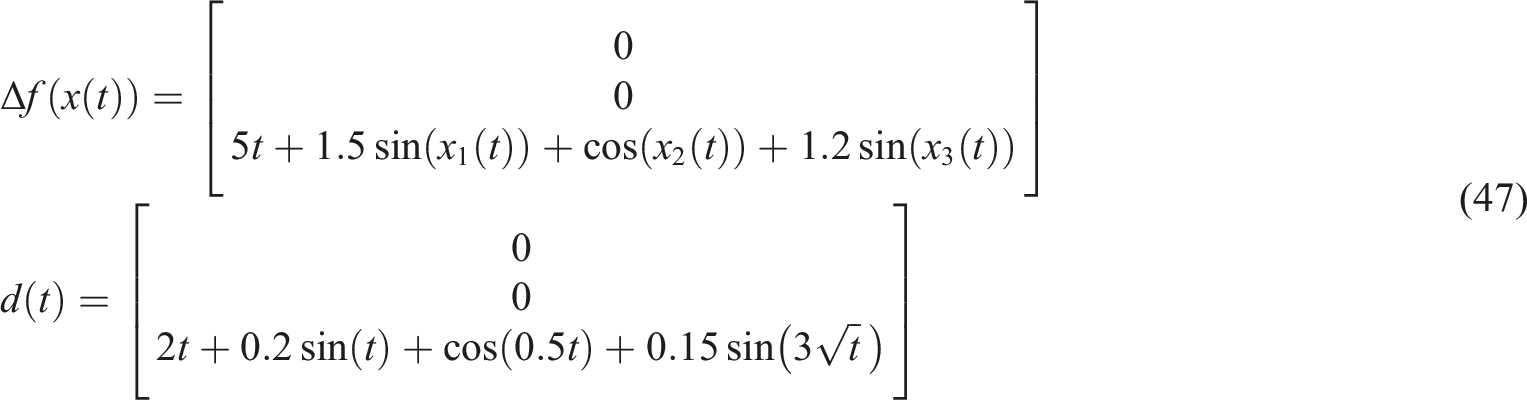
Moreover, the desired system (45) with uncertainties, external disturbances, and control inputs can be consider as the receiver chaotic system as follows

The exterior disturbance and uncertainty terms of receiver chaotic system are chosen as follows
Also, the nonlinear function
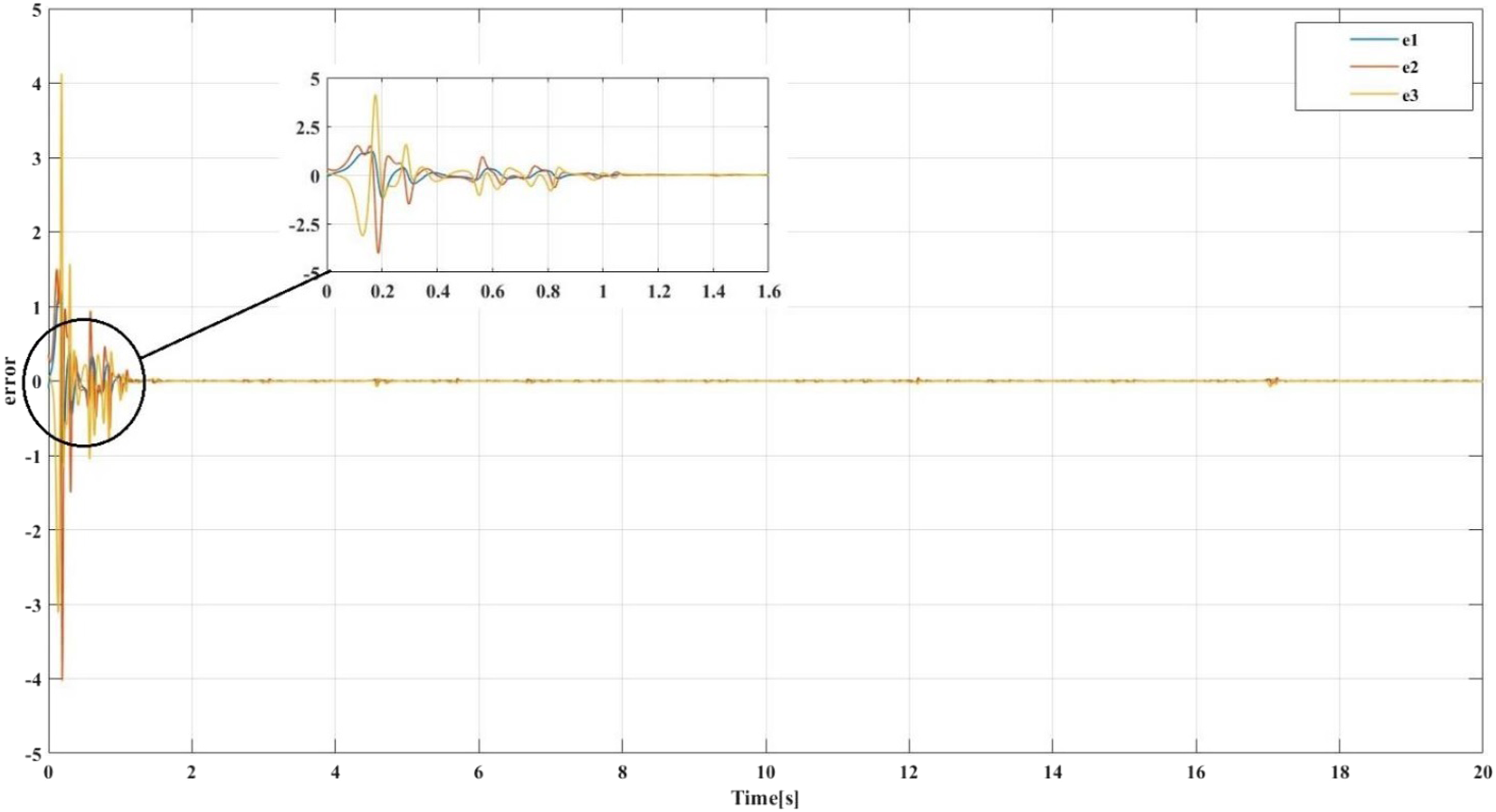
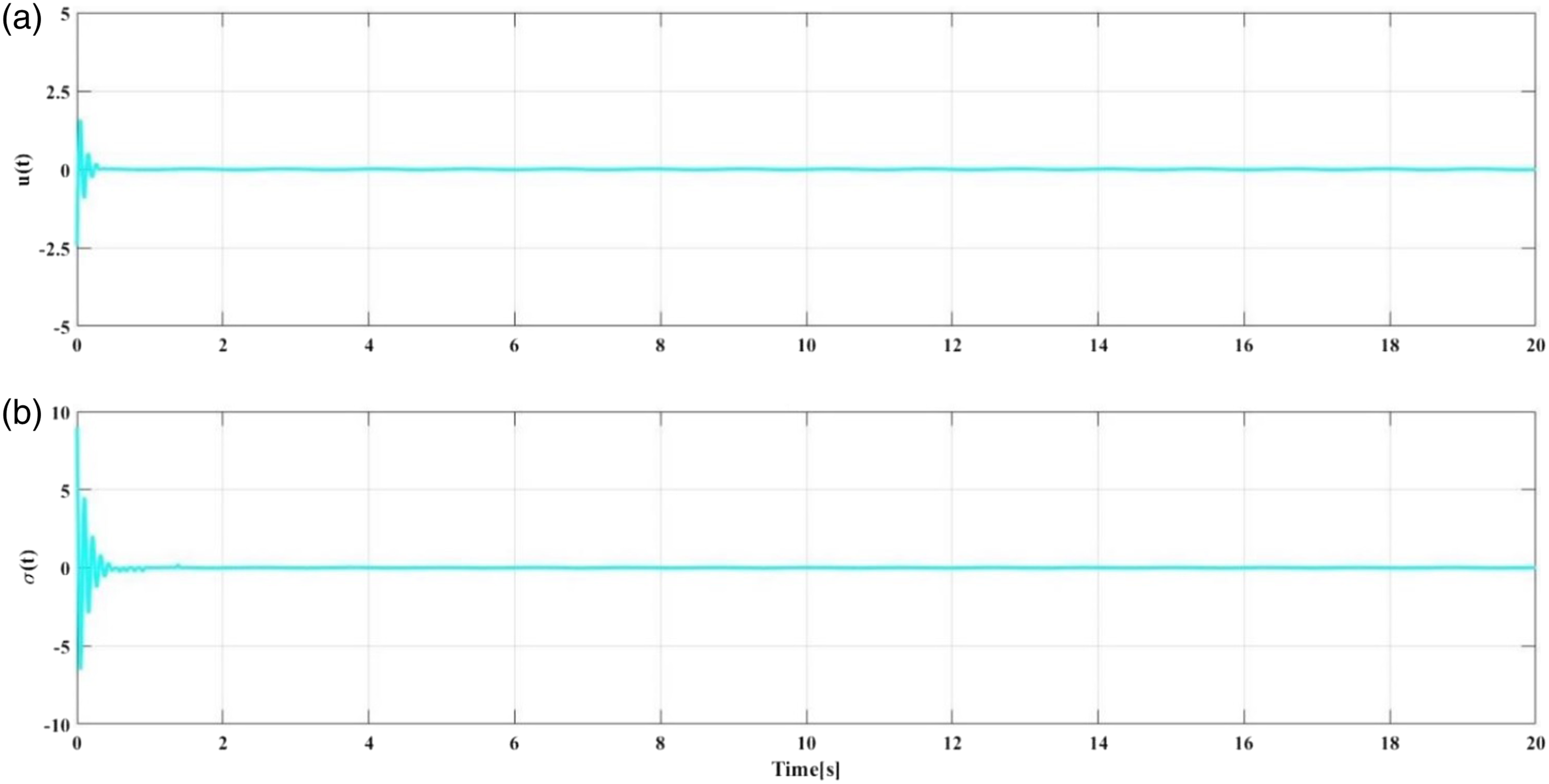
In this simulation, the initial conditions of transmitter/receiver chaotic systems are chosen as State responses State responses State trajectories Error signals Control signal 
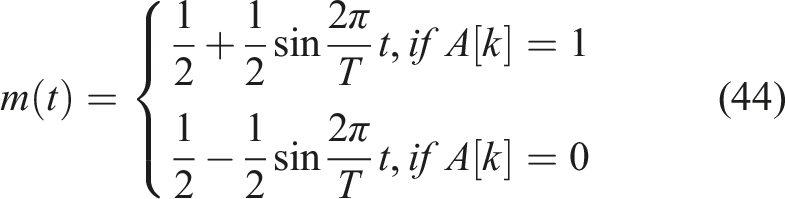
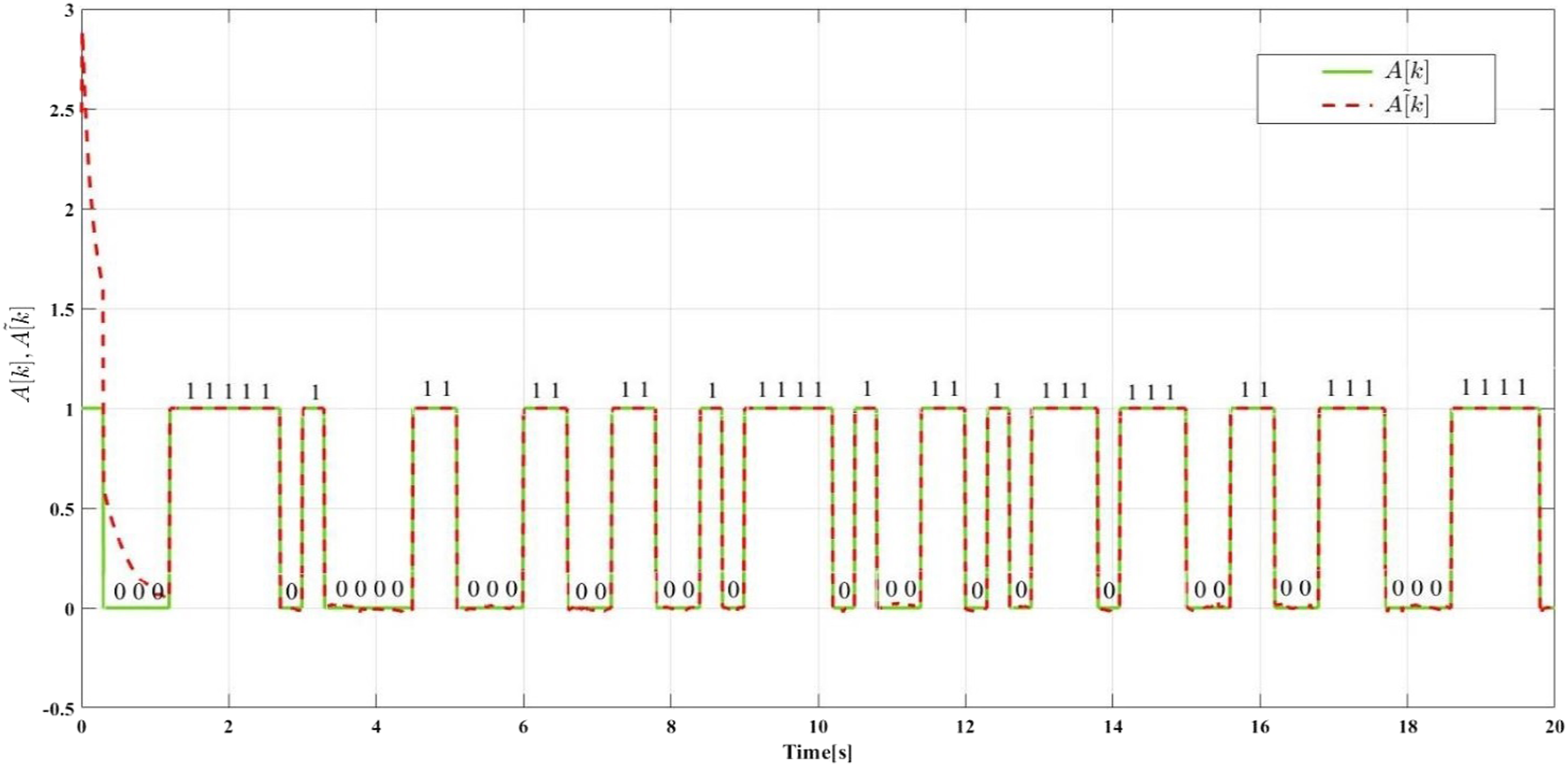
In what follows, the practicality and application of suggested scheme for chaotic cryptosystem is confirmed using numerical simulation. Binary digital input with data rate 3 bit/s is applied in this simulation as the original digital sequences that will be delivered. Also, the combination matrix (a) Original and decrypted modulated signal. (b) Encrypted modulated signal. Original and reiterative digital sequences.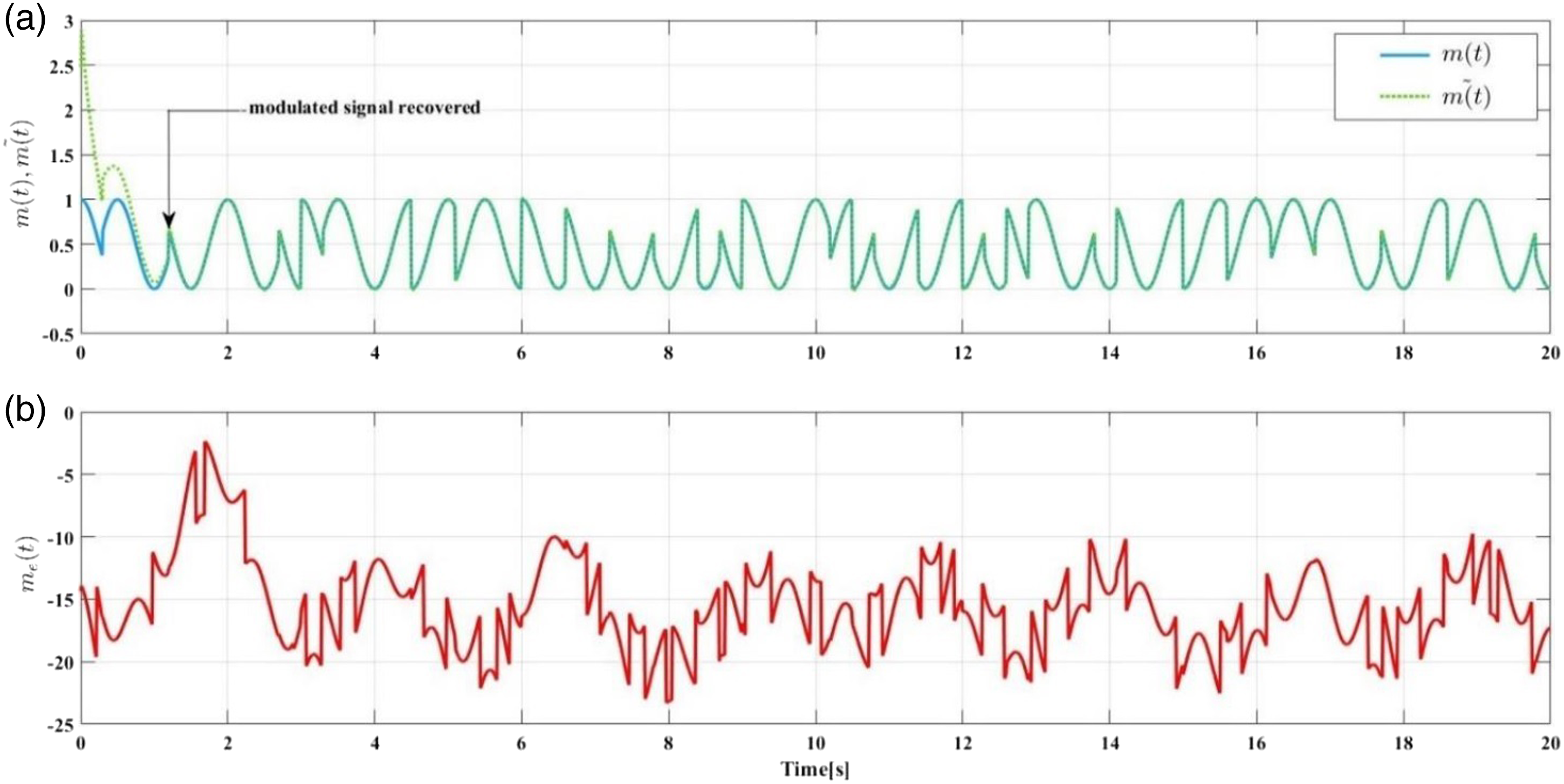
The conventional pseudorandom signals are used for encryption of digital signals (“0”, “1”) in wireless communication. Due to the increase of gain of the system, the code word length is required to be increased; but, due to the practical limitation and increase in complexity, the chaotic signals can be used as alternative to pseudorandom codes for encryption of digital signals. In this regard, a signal encryption technique based on the chaotic systems is presented. By using the functions (45) and (46), the chaotic signals are generated and used as the encryption signals by which the digital modulated signal function (44) is scrambled at the transmitter system. The proposed scheme recovers the digital information signal exactly via synchronization by using the control input (33) in the receiver portion.
The SMC approach is a robust control method which has many powerful characteristics, such as low sensitivity to external disturbances and robustness to the uncertainties due to the structural variations and unmodeled dynamics. Furthermore, the finite-time control strategies have demonstrated better robustness and disturbance rejection properties (Yu, 2010). However, due to the application of the proposed nonlinear dynamic system in the implementation of secure communication system, and also due to the characteristics of the communication channel such as noise and parametric uncertainty, the adaptive nonsingular integral-type sliding mode controller introduced in this paper can overcome time-varying parametric uncertainties and time-varying external disturbances (Xiu et al., 2021a; Zhang et al., 2020).
Various nonsingular TSMC approaches have been investigated in recent years to mitigate singularity problem (Han et al., 2015; Jing et al., 2019; Pukdeboon and Siricharuanun, 2014; Wang et al., 2018; Yi and Zhai, 2019). On the other hand, in order to have a reliable secure chaotic communication system, the synchronization time should be as short as possible, the transmitter must be able to change the chaotic function of the dynamic system (
In comparison with the common encryption schemes, due to high time consumption, key distribution problem, and low-efficiency level in the traditional encryption schemes, various new research works based on chaos encryption algorithms have been investigated. The chaos-based encryption is a fast and advanced security algorithm with high sensitivity to the initial conditions, pseudo-randomness property, no periodicity, and the system parameter dependency. These properties enable to support permutation-diffusion requirement in the cryptosystem establishment (Thein et al., 2017). Specially, unlike the models introduced in other chaotic secure communication methods reported in the literature, such as (Chen et al., 2020), our proposed method as multi-shift cipher encryption and chaotic modulation presents the following main aspects: (a) using the advantages of the chaotic masking method such as simplicity, low time consumption, and very easily implementation in electronic circuits and (b) eliminating the disadvantages of chaos masking such as weakness against the conventional attack methods by using data modulation algorithm and improvement of the security of masking method.
6. Conclusions
This article proposed an adaptive second-order SMC tracking control law with fast reaching condition for tracking/synchronization of nonlinear dynamical systems with unknown upper bounds of uncertainties and disturbances. The proposed approach was also used to design a digital secure transmission scheme according to the chaotic systems. Computer simulations and analytical study confirmed the robustness, ease of implementation, and fast convergence rate of recommended tactic. Furthermore, its implementation to a digital data transmission scheme showed that chaotic secure communication improves the security of the communication system and results in the recovery of the encrypted signals in approximately 1s.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data Availability Statement
The data that support the findings of this research paper are available from the corresponding author upon reasonable request.