
Abstract
Part looseness is a common fault in rotor systems, which may lead to serious dynamic problems. Rotor system with part looseness turns to be a complicated nonlinear problem, with gyroscopic and dry friction effects occurring simultaneously. The analysis of nonlinear systems is in general confronted with two key challenges: complicated calculation method and long calculation time. This work has developed a fast and efficient numerical scheme based on nonlinear modal analysis. By employing the proposed nonlinear modal analysis strategy, the essential gyroscopic effect, as well as the dry friction influence caused by part looseness, are both taken into account when analyzing the dynamic behavior of rotor systems. First, the theoretical aspects and the analysis approach considering the nonlinear force and the gyroscopic effect are proposed for a general rotor system. Second, by employing the proposed nonlinear modal strategy, simulations are conducted on a general rotor system considering the gyroscopic effect and dry friction caused by part looseness. Third, modal parameters such as resonance frequencies and modal damping ratios are carefully investigated as functions of rotation speed and modal amplitude. In the realization of a nonlinear modal analysis of a rotor system, the key point is to establish the relationship between modal parameters with both modal amplitude and rotation velocity. The proposed strategy can help better analyzing and interpreting the dynamic characteristics of rotor systems from the modal overview.
1. Introduction
The requirement of high-performance rotor systems such as aero-engine leads to a more complex structure design with lighter weight. These requirements lead to some typical kinds of faults in rotor systems, including dry friction (Shang et al., 2011), rub-impact (Chen and Liu, 2016) caused by multiple reasons, such as part looseness (see, for example, Jiang et al., 2017; Wei et al., 2019; Yang et al., 2018, 2020), mass unbalance, rotor misalignment, shaft bowing, etc. (Chen and Liu, 2016). These faults can result in a disaster to a working rotor.
Joint looseness is a common fault, which may cause different nonlinear effects. Among different joint types, bolted joints are the most used in an aero-engine (Li et al., 2018; Shao et al., 2019). Furthermore, the preload force of bolted joints will influence the dynamic characteristics, and a loosening bolted joint can cause nonlinear friction forces because of the stick-slip effect on the interfaces. Therefore, it is necessary to study the influence of these faults on a rotor, so as to avoid the potential problems and detect the possible faults, and to improve the behavior and stability of the rotor.
Many rotor dynamics problems are nonlinear in nature. In the past, nonlinear problems were often simplified to linear models to facilitate analysis, since most nonlinear problems were difficult to be solved accurately and efficiently, while linearization treatment can help obtaining approximate results. But in many cases, using linearization methods to study nonlinear problems will not only lead to quantitative errors but also qualitative errors. Faulty rotor dynamics are mostly nonlinear dynamics problems and it is of great significance to develop nonlinear methods to analyze rotor dynamic phenomenon caused by various faults. Many researches have studied different faults that may happen in a rotor system theoretically, experimentally, and numerically. Chipato et al. (2019) have investigated the effect of friction between the rotor and stator of an overhung rotor model, which showed the existence of two types of quasi-periodic bouncing solutions. More studies were brought out with the rotor system considering rub-impact effects. Sorge (2015, 2017) has employed the Krylov–Bogoliubov method and the hysteretic model, in order to study the influence of support stiffness anisotropy in a rotor system with viscous. Gao et al. (2020) have focused on the nonlinear vibration of a rotor system under barrel roll flight coupled rub-impact faults, and have found that the super-harmonic components depend on the seriousness of rub-impact and rotating speed. Ma et al. (2009) have studied two types of rub-impact faults: coupled with the crack and coupled with the oil-film instability, with different severity of rub-impact. They have discovered the influence of the severity of the crack on the system’s motion and the dominant role of oil-film instability in the coupled fault. However, most researches on gyroscopic systems did not take the dry friction effect into account.
Modal analysis is one of the most important strategies. Suh et al. (2005) have introduced modulated coordinate to realize a modal analysis method for asymmetric rotor systems with parameters which change periodically with time. Ma et al. (2020) have employed the structural intensity method to analyze the relation of modal shapes and instantaneous vibrational energy flow transmission characteristics of a dual-rotor-support-casing model. Tamrakar and Mittal (2016) have analyzed the modal characteristics of a heavy rotor with rotary inertia and shear effects with the Rayleigh beam element. Kim et al. (2021) have analyzed the modal behaviors of a rotor-blade system with flexible blades and rigid disk, and the stability of this system. Chouksey et al. (2012) have investigated the effect of material damping and forces of fluid film on modes of a rotor-shaft system with anti-friction and journal bearings. The modal analysis has been investigated for rotor systems considering nonlinear forces in recent years. For a nonlinear system, the modal parameters depend on the modal amplitude (Setio et al., 1992). Chen and Jiang (2015) have studied the influence of forward and backward whirl on nonlinear normal modes of a rotor/stator rubbing system with four degree-of-freedom. Yu et al. (2021) have proposed a strategy to study a rotor system with rub-impact, and investigated its influence on the nonlinear modal behaviors and on the response. Few modal analyses on rotor systems considering both gyroscopic effect and dry friction force has been found.
In this paper, a new procedure of modal analysis of the gyroscopic system is proposed, where the gyroscopic effect is considered as a linear force depending on the rotation speed, which is antisymmetric in the matrix form; while the dry friction effect is considered as a nonlinear force relying on both relative displacement and velocity. This method can be considered as an extension of nonlinear modal analysis, which helps to calculate the forced response of a gyroscopic system considering the dry friction effect rapidly with good accuracy. Furthermore, by applying this method, the dynamic characteristics of the nonlinear gyroscopic system can be estimated by the obtained nonlinear normal modes, without having to calculate the forced response.
This paper is organized as follows: In Section. 2, the theoretical aspects are presented. The motion equation of a general rotor system is announced in the first place. A hysteretic loop dry friction model is established based on Masing’s rule, which is later applied in nonlinear modal analysis. The nonlinear modal theory is modified to be adapted to the rotor system. A general strategy is then put forward to realize the modal analysis of the nonlinear gyroscopic system. In Section. 3, this strategy is applied to the rotor system numerically, and validated by comparing with the results obtained by the classical time integration method. The obtained modal parameters are analyzed mainly by investigating the relationship between modal frequencies, modal damping ratios, and rotation speed with modal amplitude. Some discussions are conducted in Section. 4. General conclusions and outlooks are presented in Section. 5.
2. Nonlinear modal theory of rotor system
2.1. Motion equation of the nonlinear rotor system
The motion equation of the rotor system without damping is as shown in equation (1)

According to the elastic support loosening failure of a core engine caused by the front fulcrum squirrel cage support discovered in engineering practice, a dry friction nonlinear dynamic model of the rotor was established, as shown in Figure 1 Model of rotor system.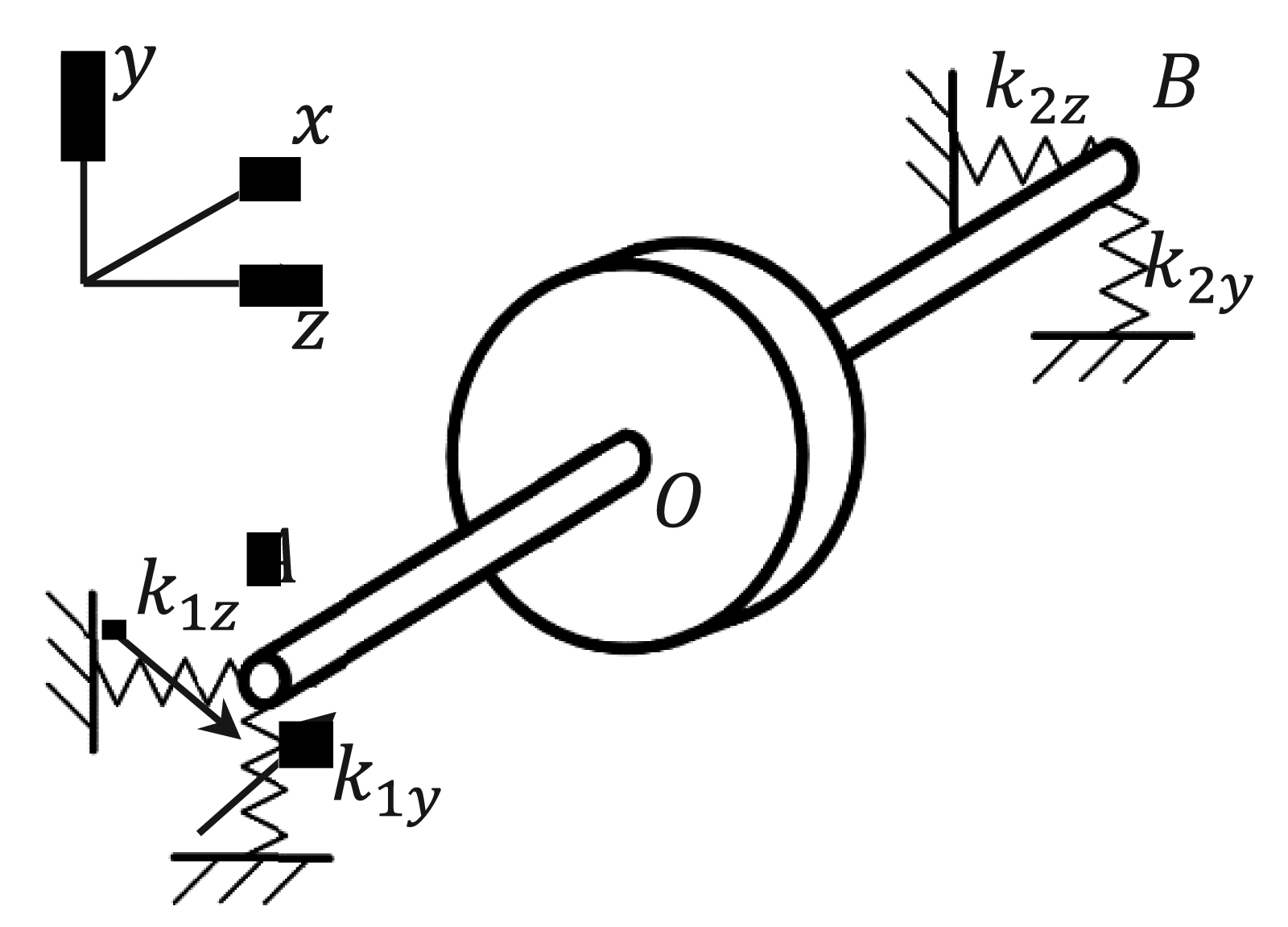
In this model, the front extreme point A and the back extreme point B are elastically connected to the casing which is considered to be fixed. The rigidity coefficient of two extremities in direction

2.2. Dry friction model based on Masing’s rule
In order to characterize the dry friction force in Figure 1, non-deteriorating Masing’s rule is employed to describe the force-displacement relation (Chiang, 1999; Huang, et al., 2018; Masing, 1926). The initial loading curve is described by

In the steady state, according to Masing’s rule, the unloading and reloading branches constitute a hysteretic loop, which is described by

In a steady period, the dry friction force can then be expressed in complex modal space

Noting
It should be pointed out that in the case of non-steady response, or loading between variable limits, the hypothesis of Masing’s rule is not satisfied. In this paper, thanks to the condition that the exciting force is far larger than the dry friction force at resonance points, the steady state is considered as single-frequency harmonic, and the high order harmonic components are negligible. If they have the same order of magnitude or the friction is more important, the higher-order harmonic components must be considered to achieve an accurate enough result, which will be discussed in a later work.
In this paper, the classic Coulomb model is used to describe the dry friction force (Coulomb, 1785). A continuous approximation of the hyperbolic tangent function is used to avoid the problems in simulation (Dahl, 1968). With this Coulomb model, the hysteretic loop is shown in Figure 2. This figure represents the friction in a steady period with harmonic displacement Hysteretic loop of dry friction.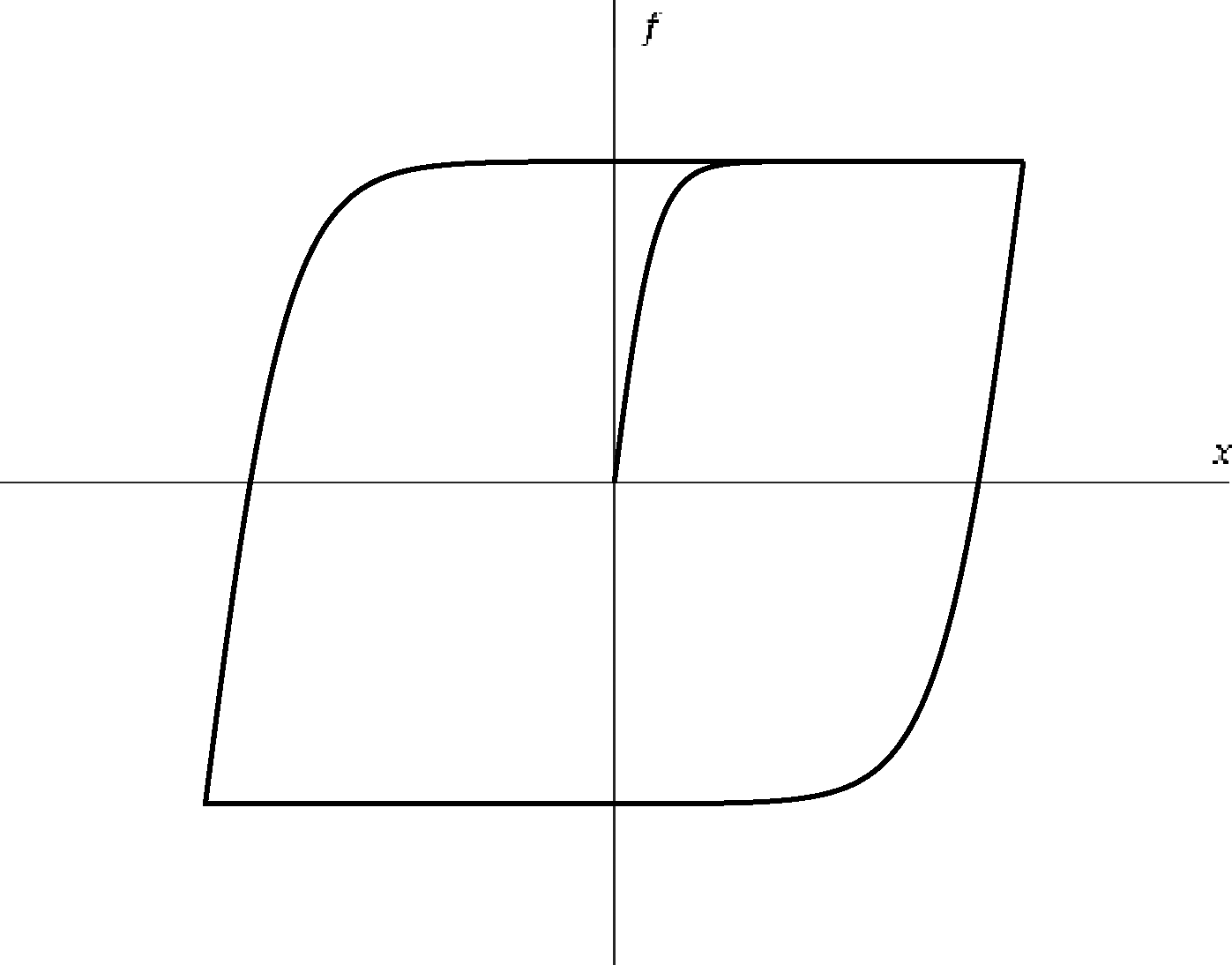

Combining with the Masing model shown in equation (4), the steady period of the hysteretic loop function of the above Coulomb model is formulated by equation (7)

2.3. Nonlinear modal theory of rotor system
With the model in precedent Section. 2.2, the dry friction force can be noted as

Therefore, in complex modal space, this friction force can be expressed as

According to the nonlinear modal theory, the

Substituting equation (9) into equation (10), and applying the normalization condition, we have:
With the nonlinear modal theory, the nonlinear modal parameters are defined as follows



In equation (10), the gyroscopic matrix is a function of rotation speed
Based on the nonlinear mode theory proposed by Setio et al. (1992), the steady state response of the rotor system corresponding to a harmonic excitation

Substituting equation (15) into the motion equation of the rotor system, under a given rotation speed

Finally, with the nonlinear mode superposition method, the forced response in frequency domain can be solved

The essential steps to analyze the steady state response of a nonlinear rotor system based on nonlinear modal analysis can be summarized as follows: Step 1, the governing motion equation of the rotor system is established, which gives the mass matrix, the stiffness matrix and the gyroscopic matrix of the system. Step 2, the nonlinear force model, which is the model of dry friction in this case, is determined according to Masing’s rule, so as to take the micro-slip phenomena into account. Step 3, the modal parameters, including modal frequencies, modal damping ratio and modal shapes, are calculated as functions of modal amplitudes and rotation speeds. Step 4, based on the results of the third step, the relation of modal parameters with modal amplitude and rotation speed are obtained with interpolation. Step 5, the steady state response corresponding to harmonic excitation of the gyroscopic system can be resolved. Step 6, the forced responses in frequency domain can be approximated based on the single nonlinear mode theory (Setio, et al., 1992).
3. Simulation results
3.1.Forced response of the rotor system
In this part, the forced response curves in frequency domain obtained with nonlinear modal theory are investigated. The unbalanced excitation is expressed by
The parameters of the rotor system are shown in Table 1. 1) Forced response in frequency domain of rotor system without dry friction Values of parameters of rotor system.
For the rotor system without dry friction, the amplitude of the excitation force Forced response curve in frequency domain of 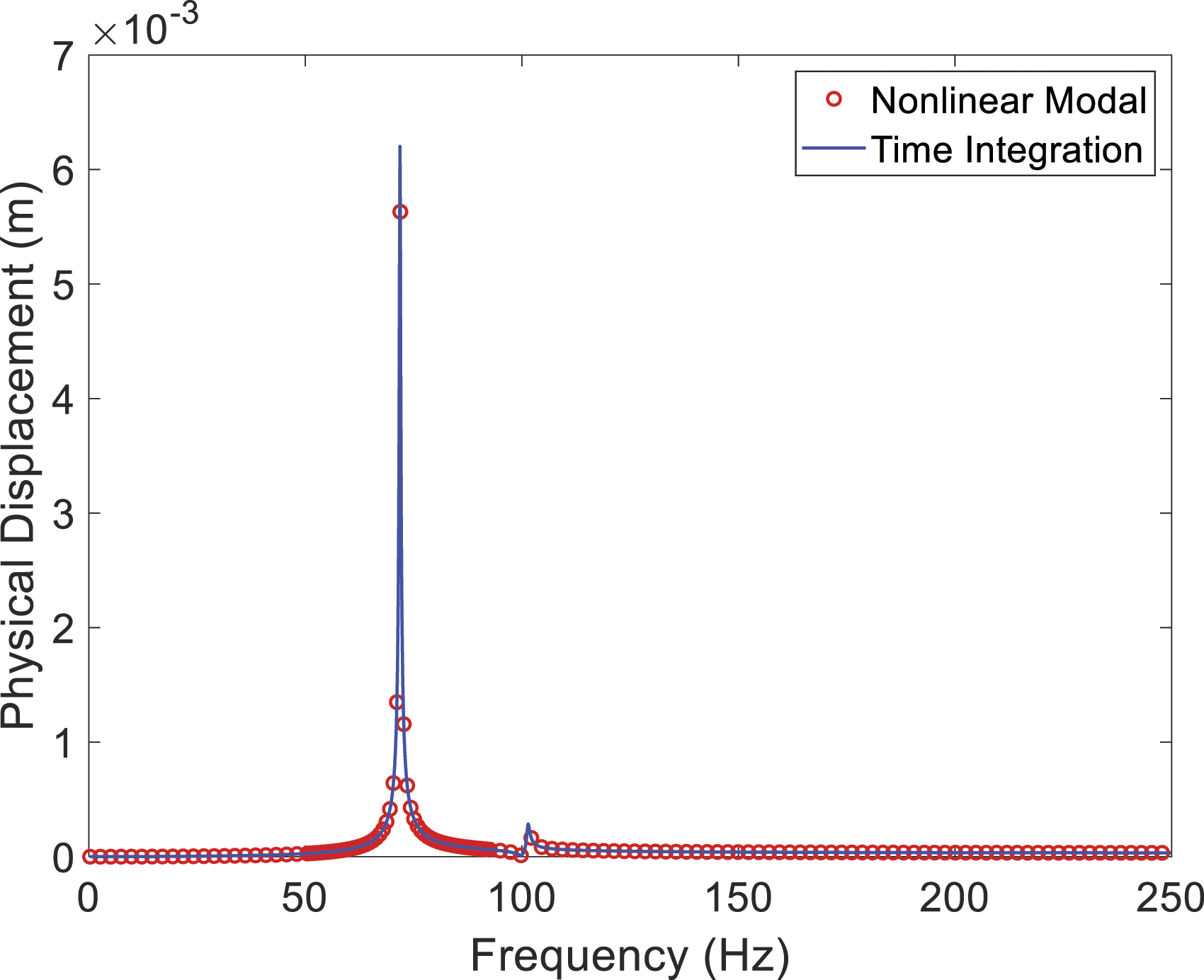
In the simulation, the time integration method is employed as the reference. From Figure 3, it can be seen that, compared with the classical time integration method, the nonlinear modal theory gives the same steady state response of a rotor system without dry friction, which demonstrates that the nonlinear modal strategy applied on a linear gyroscopic system is reliable. 2) Forced response in frequency domain of rotor system with dry friction
For the weakly nonlinear rotor system with dry friction, the amplitude of the excitation force Forced response curves in frequency domain of 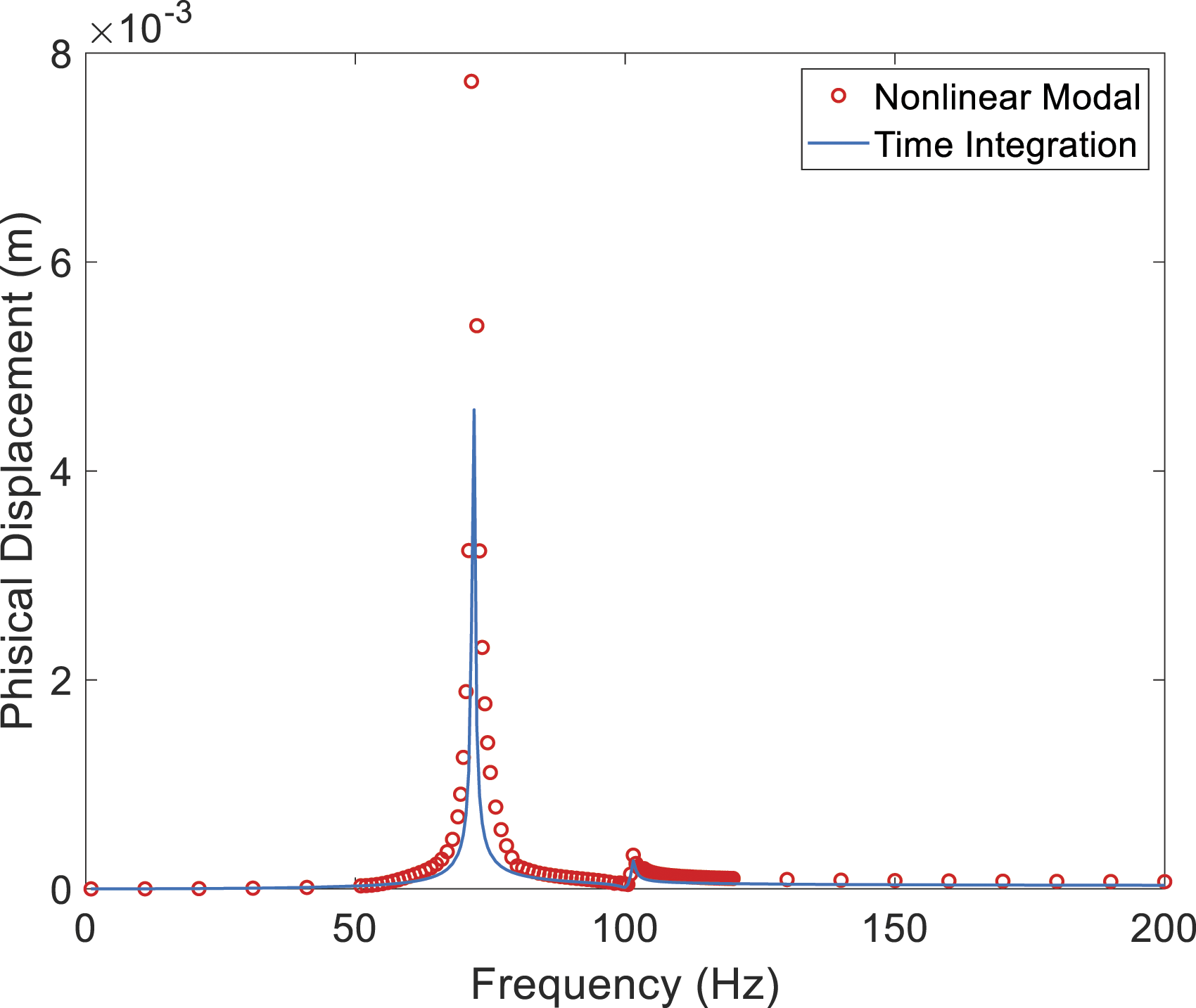
In the same way, the time integration method is employed as the reference method. In Figure 4, it is noticed that, compared with the time integration method, the two resonance frequencies given by nonlinear modal theory superpose quite well with the reference method, with a difference less than 1%. Difference in response amplitude can be observed, which is caused by neglecting higher-order harmonics of dry friction force in the modal approach. What is more, the resonant frequencies are of great importance when studying the dynamic characteristics of the rotor system, because it is essential to avoid the resonance in working rotating speed. With the proposed strategy, the resonant frequencies can be very well estimated. The nonlinear modal theory is quite promising in vibration design of rotor systems. The jump phenomenon is absent for the weak nonlinearity.
Based on the above results, some observations can be drawn: (1) For a gyroscopic system without dry friction, the nonlinear modal strategy can provide accurate responses when considering gyroscopic effects. (2) For a gyroscopic system with dry friction, the nonlinear modal approach can provide a relatively accurate estimation of resonant frequencies, but in order to obtain more accurate results of resonant amplitude, it should be admitted that higher-order harmonics of dry friction forces should be taken into account, which will be discussed in future work.
3.2. Analysis of modal parameters
1) Analysis of modal parameters of rotor system without dry friction
For the rotor system without dry friction, by applying the proposed nonlinear modal analysis approach, the modal frequency is a function of rotation speed Modal frequencies of rotor system without dry friction. (a) Modal frequencies in function of rotation speed. (b) order 1 backward whirl. (c) order 1 forward whirl. (d) order 2 backward whirl. (e) order 2 forward whirl. Campbell diagram of rotor system without dry friction.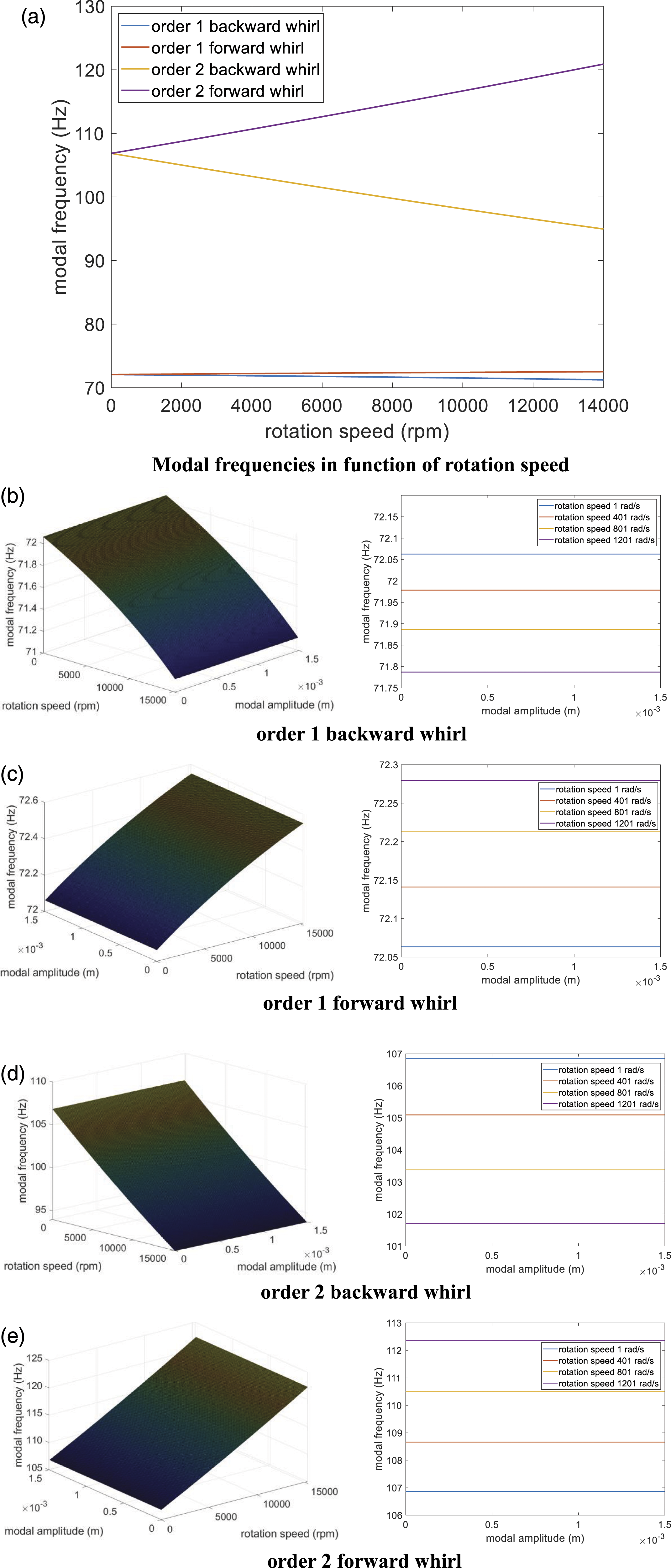
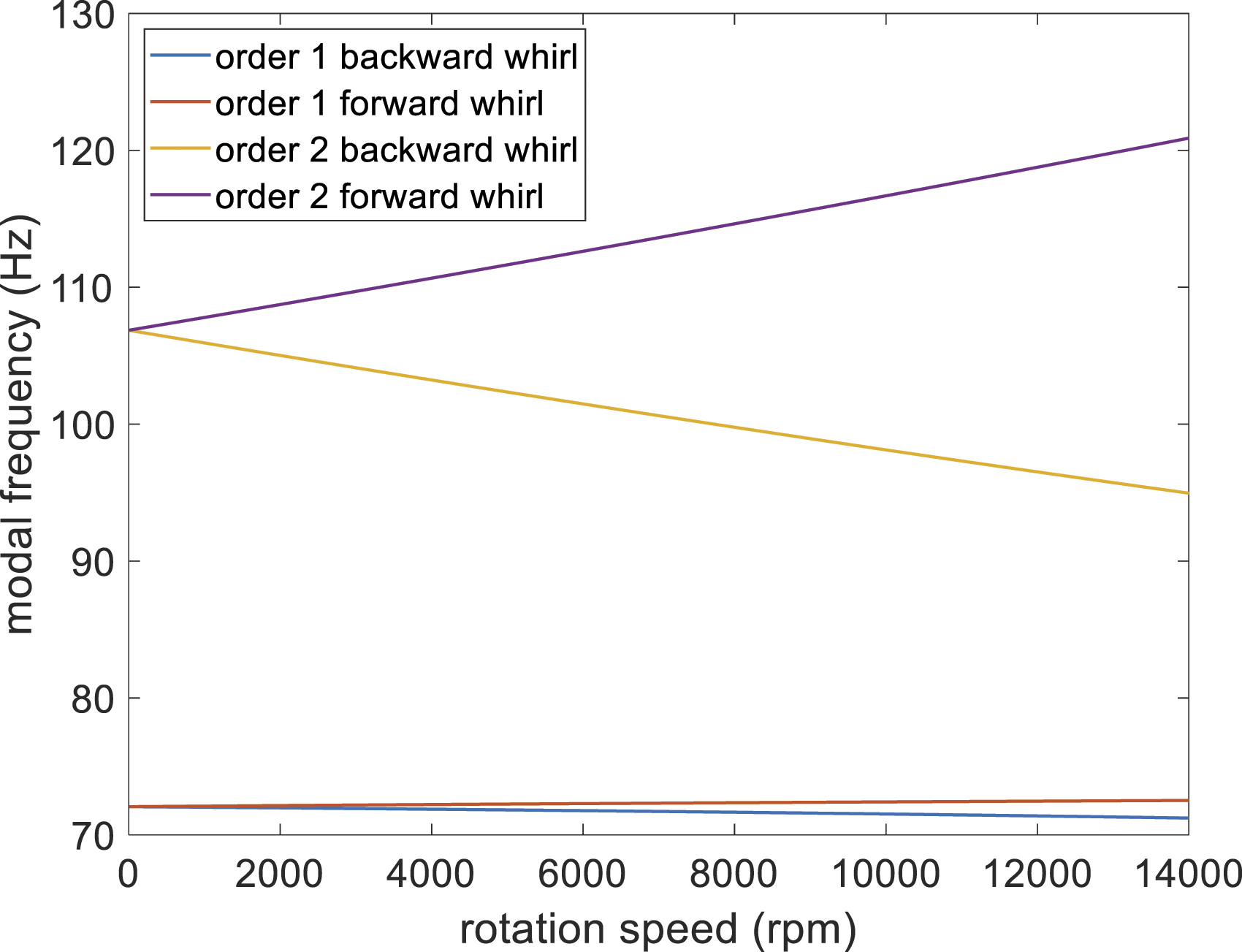
It can be observed from Figures 5(b)–(e) that the nonlinear modal frequencies do not vary with the modal amplitudes. This is reasonable since the gyroscopic effect only depends on the rotation speed. With the comparison of Figure 5(a) and Figure 6, it can be concluded that the modal frequencies obtained by the nonlinear modal theory are the same as the classical approach. Since the rotor system is assumed to be symmetric, when the rotation speed is zero, the modal frequencies are the same as those without the gyroscopic effect. With the increase of rotation speed, these modal frequencies show the characteristics of forward whirl and backward whirl, and they can be distinguished according to the rotor theory. Together with Figure 4, it is shown that the gyroscopic effect leads to a clear decrease of the second resonant frequency, compared with the system of zero rotation speed, as a result of backward whirl effect. 2) Analysis of modal parameters of rotor system with dry friction
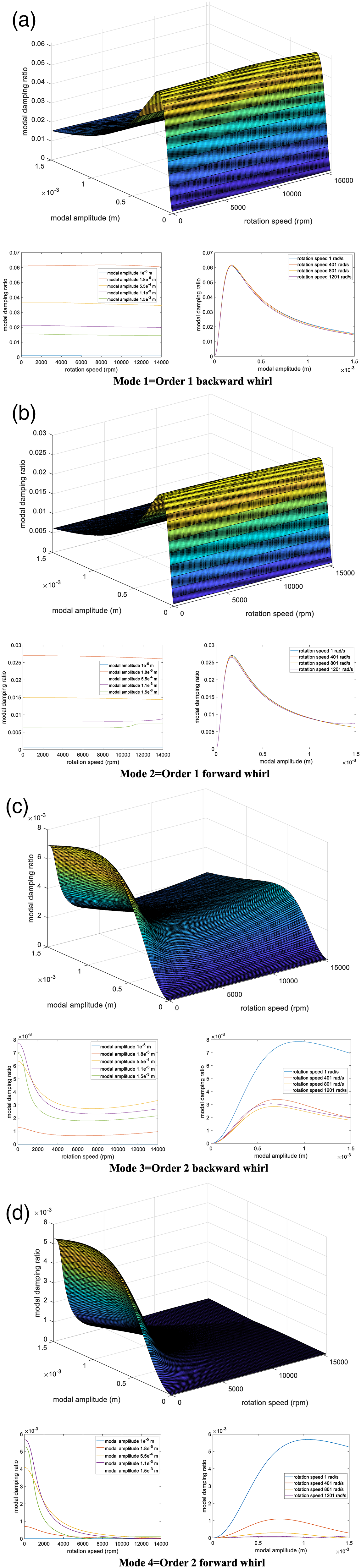
For the weakly nonlinear rotor system with dry friction, the modal parameters to analyze are modal frequency (Figure 7) and modal damping ratio (Figure 8). With these two modal parameters, it is more intuitive to interpret the influence of vibration level and working rotational speed for rotor systems. Modal frequency in function of modal amplitude and rotation speed of rotor system with dry friction. (a) Mode 1 = Order 1 backward whirl. (b) Mode 2 = Order 1 forward whirl. (c) Mode 3 = Order 2 backward whirl. (d) Mode 4 = Order 2 forward whirl. Damping ratio in function of modal amplitude and rotation speed of rotor system with dry friction. (a) Mode 1 = Order 1 backward whirl. (b) Mode 2 = Order 1 forward whirl. (c) Mode 3 = Order 2 backward whirl. (d) Mode 4 = Order 2 forward whirl.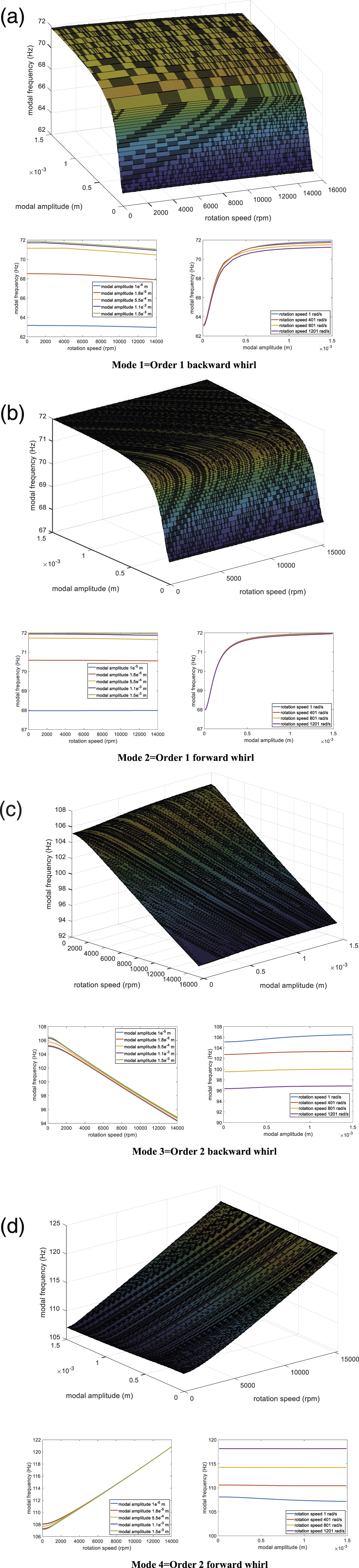
For this rotor system with dry friction, each nonlinear mode can be corresponded to a backward whirl or forward whirl mode of this rotor system. Figure 7 shows the modal frequencies in function of modal amplitude and rotation speed of the rotor system considering dry friction effect.
The first nonlinear mode corresponds to the first order backward whirl mode (Figure 7(a)). The modal frequency changes from about 63 Hz to 72 Hz with its modal amplitudes and rotation speeds. For weak modal amplitude, the modal frequency is smaller than that of the system without dry friction. This frequency increases with modal amplitude at a determined rotation speed. This frequency increases from about 63.2 Hz to 71.9 Hz with the increase of modal amplitude under weak rotation speed (1 rpm), while this frequency increases from 62.9 Hz to 70.9 Hz for high rotation speed (14,000 rpm). For one certain modal amplitude, the influence of the rotation speed reveals the backward whirl characteristic, since the modal frequency decreases with the rotation speed. The maximum modal frequency is limited to a certain value.
The second nonlinear mode corresponds to the first order forward whirl mode (Figure 7(b)). The modal frequency varies from about 68 Hz to 72 Hz. For weak modal amplitudes, the modal frequency is smaller than that of the system without dry friction. This frequency increases from about 68 Hz to 72 Hz with the increase of modal amplitude at both low and high rotation speeds. When the modal amplitude is small, the modal frequency increases with the rotation speed. When the modal amplitude is bigger, the modal frequency decreases with the rotation speed. This mode shows little difference with the forward whirl effect, whose frequency increases with the rotation speed. However, since this is the first order forward whirl, the variation in frequency is not remarkable as shown in Figure 6. In comparison with mode 1, the difference of the modal frequency of mode 2 with different modal amplitude under a certain rotation speed is smaller.
The third nonlinear mode corresponds to the second order backward whirl mode (Figure 7(c)). For weak modal amplitudes, the modal frequency is smaller than that of the system without dry friction. The modal frequency increases from about 105.1 Hz to 106.5 Hz with an increasing modal amplitude at weak rotation speed (1 rpm), while this frequency increases from 96.4 Hz to 96.9 Hz at high rotation speed (14,000 rpm). This mode coincides very well with the backward whirl mode characteristic, as for any modal amplitude, the modal frequency decreases when the rotation speed decreases.
The fourth nonlinear mode corresponds to the second order forward whirl mode (Figure 7(d)). For weak modal amplitudes, the modal frequency is bigger than that of the system without dry friction. The modal frequency decreases from about 108.1 Hz to 107.2 Hz with an increasing modal amplitude at weak rotation speed (1 rpm), while this frequency shows little difference (118.2 Hz) at high rotation speed (14,000 rpm). This mode shows well the characteristic of a forward whirl mode, as for any value of its modal amplitude, the modal frequency increases when the rotation speed increases.
In a few words, in the selected rotation speed range, for the first order backward and forward modes, dry friction effect shows more importance in the influence of modal frequency than rotation speed does, while for second order backward and forward modes, the influence of rotation speed, thus the gyroscopic effect, is more important. Therefore, the shape of modal frequencies of each order backward and forward mode are similar.
Figure 8 shows the modal frequencies in function of modal amplitude and rotation speed of the rotor system considering dry friction effect. For all modes, their modal damping ratios are all zero when modal amplitude tends to zero.
The first nonlinear mode corresponds to the first order backward whirl mode (Figure 8(a)). The modal damping ratio reaches the maximum (0.06) when modal amplitude is about
The second nonlinear mode corresponds to the first order forward whirl mode (Figure 8(b)). The modal damping ratio reaches the maximum (0.027) of when modal amplitude is about
The third nonlinear mode corresponds to the second order backward whirl mode (Figure 8(c)). The modal damping ratio reaches the maximum (
The fourth nonlinear mode corresponds to the second order forward whirl mode (Figure 8(c)). The modal damping ratio reaches the maximum (
4. Discussion
According to Figure 5, the modal parameters of the rotor system without dry friction effect are in function of rotation speed, which is reasonable since the gyroscopic matrix is a linear function of rotation speed.
According to Figure 7, for the 2 premier orders, the modal frequency is mainly influenced by the modal amplitude, which is the characteristic of dry friction effect. For the 2 higher orders, the modal frequency is mainly influenced by the rotation speed, which shows the influence of gyroscopic effect. For a given modal amplitude, the relationship between modal frequency and rotation speed mainly obeys the rules defined by rotor dynamic theory. For a modal amplitude big enough, the modal frequency tends to the modal frequency of the corresponding linear system, which is one of the characteristics of the dry friction effect.
According to Figure 8, for the 2 premier orders, the modal damping ratio is mainly influenced by the modal amplitude, which is the characteristic of dry friction effect, with little difference at different rotation speed. For the 2 higher orders, the rotation speed shows more influence on modal damping ratio. At a same modal amplitude, the modal damping ratio decreases at low rotation speed. The decrease of the damping ratio of these 2 modes is more remarkable than the 2 premier modes.
For both of the modal parameters, it is reasonable that these parameters show more characteristics of the dry friction effect at weak rotation speeds, when the gyroscopic effect is not remarkable. The first backward and forward modes are more influenced by the dry friction effect, and the second ones are more influenced by the gyroscopic effect.
When calculating natural frequencies and mode shapes of the rotor system, due to the asymmetry of the gyroscopic matrix, the right vector does not form an orthogonal group. Therefore, the transposed eigenvalue problem must be solved to obtain the left vector adjoint group for modal decoupling. This paper has provided a new method for calculating rotor system’s modal information by considering the gyroscopic term as a varying force. The fact that this term is proportional to the rotating speed makes nonlinear mode strategy quite suitable for the analysis. Moreover, the simulation results have shown quite good proof for the validation of the proposed method.
It is also noticeable that the calculation speed of this strategy is much quicker than the traditional time integration method. for a computer of CPU Inter® Core™ i7-7900 CPU @ 3.60 GHz 3.60 GHz, the time to solve the same rotor system is about 2 hours for 1600 frequencies of excitation for nonlinear modal method, so about 4.5 s for one frequency. It takes about 4.5 h for 121 frequencies of excitation for time integral method, so about 135 s for one frequency. With this comparison, we can see that the resolution speed of proposed nonlinear modal theory is much higher than traditional time integral method.
5. Conclusion
This paper has proposed a nonlinear modal approach for analyzing dynamic behavior of weakly nonlinear rotor systems considering gyroscopic effects and friction effects. From the simulation results applied on a general rotor system, the following conclusions can be drawn: (1) For a gyroscopic system without dry friction, the nonlinear modes are exactly the same as the modes of forward whirl and backward whirl. For a gyroscopic system with dry friction, the relation of modal parameters (modal frequency and modal damping ratio) and modal amplitude and rotation speed depends on the order of this mode and whether the mode correspond to a forward whirl or a backward whirl. (2) The influence of rotation speed on modal parameters, including modal frequencies and modal damping ratios, differs in the order of the mode. For lower orders, the influence of modal amplitude is more important, while for the higher orders, that of rotation speed is dominant.
The proposed nonlinear modal strategy is capable to give good estimation of resonant frequencies efficiently, as well as providing interesting modal parameters for analyzing rotor dynamics, which is quite promising for the vibration design of rotor systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the National Natural Science Foundation of China, project approval number 52105083 and 11804015, the Innovation Centre for Advanced Aviation Power, grant number HKCX2020-02-016, and the major projects of aero-engines and gas turbines, grant number J2019-IV-023-0091.
Appendix
Symbol
Variable type
Explanation
Matrix
Mass matrix
Matrix
Gyroscopic matrix
Matrix
Stiffness matrix
Vector
Displacement vector
Scalar
Rigidity coefficient of
direction at A
Scalar
Rigidity coefficient of
direction at A
Scalar
Rigidity coefficient of
direction at B
Scalar
Rigidity coefficient of
direction at B
Vector
Nonlinear dry friction force
Vector
Harmonic exciting force
Scalar
Distance between barycenter and front fulcrum
Scalar
Distance between barycenter and back fulcrum
Scalar
Distance between front fulcrum and back fulcrum
Scalar
Angle between shaft and axis
Scalar
Angle between shaft and axis
Scalar
Mass of rotor
Scalar
Moment of inertia about a diameter of rotor
Scalar
Polar moment of inertia of rotor
Scalar
Rotation speed (
Scalar
Friction coefficient
Scalar
Norm of pressure in friction