
Abstract
This paper studies a free-will arbitrary time sliding mode control (FATSMC) based on the predefined-time sliding mode observer (PTSMO) for tracking control of robotic manipulators. First, a PTSMO is constructed to estimate the coupled uncertainty of the robotic manipulator system in a preset time. Then, a FATSMC scheme is proposed to realize the free-will arbitrary time tracking control for uncertain robotic manipulators and preset the upper bound on the settling time in the reaching phase. The proposed control strategy has high tracking accuracy and smooth control torque, while the convergence time of the system is nonconservative. The stability of the FATSMC and the PTSMO are rigorously demonstrated using the Lyapunov stability theory. Finally, a three-degree-of-freedom uncertain manipulator is utilized for numerical simulation. The effectiveness and superiority of the proposed control strategy are demonstrated by comparing it with several control strategies.
Keywords
1. Introduction
Tracking control of uncertain robotic manipulators has been paid much more attention in recent years, aiming to achieve higher tracking accuracy, fast response, and strong robustness. Among many control methods, the sliding mode control (SMC) technique has attracted much attention from scholars for its robustness, order reduction, ease of implementation, and design simplicity (Brahmi et al., 2020; Li et al., 2022). Up to now, the SMC has been used in a variety of applications for different control objectives, such as the chaotic systems and robotic manipulators (Ablay, 2009; Gambhire et al., 2021).
The purpose of the SMC is to force the tracking error to the sliding manifold and then converge to the origin along the sliding manifold (Drakunov and Utkin, 1992). Although the finite-time SMC (Hong et al., 2002) has received a great deal of research, its convergence time depends on the initial state of the system. For robotic manipulators, the initial states are not always available in advance, which means that the actual convergence time is hard to be guaranteed. To address this problem, a stronger property called the fixed-time stability was proposed, where the upper bound of the settling time is independent of the initial states (Polyakov, 2011). Some critical, theoretical, and mathematical analyses related to fixed-time stability were proposed in Polyakov et al. (2015); Zuo and Tie (2014, 2016), which facilitated the development and application of the fixed-time SMC. Benefiting from the fact that the convergence time of fixed-time SMC is independent of the initial state of the system, the fixed-time SMC has been extensively studied in the tracking control of robotic manipulators (Sai et al. 2021, 2022; Su et al., 2020; Zhang et al., 2019).
It is worth noting that although the upper bound on the settling time of the system is independent of the initial states, it is often challenging to find a direct relationship between the settling time and the system parameters, and in some cases, the settling time cannot be reduced to be less than a fixed-constant, even by tuning the system parameters. This motivates the formulation of prescribed-time and predefined-time stability (Sánchez-Torres et al., 2018b; Song et al., 2017). However, most of the predefined-time SMC schemes can only guarantee the predefined-time stability of the system in the reaching phase, and the actual convergence time is quite conservative compared to the preset settling time (Jiménez-Rodríguez et al., 2017b, 2018, 2020; Sánchez-Torres et al., 2015). As a response, a more advanced concept called free-will arbitrary time stabilization was proposed in Pal et al. (2020a). Subsequently, free-will arbitrary time control is combined with terminal sliding mode control (TSMC) to provide an overall settling time for the system and not only in the reaching phase (Pal et al., 2020b). However, the convergence time of the system in the reaching phase is finite-time stable and unknown, so it is necessary to determine the convergence time in the reaching phase by continuous iterations.
In addition to the problem mentioned above, the free-will arbitrary time controller in Pal et al., 2020b) is difficult to apply to tracking control of uncertain robotic manipulators because the upper bound of the coupled uncertainty of the robotic manipulator is often difficult to obtain. Meanwhile, overestimation of the upper bound on the system uncertainty leads to strong chattering of the controller. Fortunately, the observer is an effective tool to solve the above problems (Xiao et al., 2016; Xiao and Yin, 2018). In Chalanga et al. (2016); Rabiee et al. (2019), finite-time sliding mode disturbance observers were designed based on adaptive and super-twisting techniques, respectively. Additionally, in recent years, several fixed-time disturbance observers (Ni et al., 2017; Pan and Zhang, 2022; Zhang et al., 2019) have been proposed for estimating the external disturbances of the system in a fixed time. However, the above perturbation observers can only guarantee finite-time or fixed-time estimates of system perturbations, and few studies have addressed the design of predefined-time observer.
Driven by practical requirements for the uncertain robotic manipulators tracking control problem and inspired by previous discussions, a novel free-will arbitrary time sliding mode control (FATSMC) based on the predefined-time sliding mode observer (PTSMO) for uncertain robotic manipulators is investigated. To the best of the authors’ knowledge, there is hardly any research on free-will arbitrary time controllers for tracking control of uncertain robotic manipulators. The contributions of this paper are twofold. First, a novel PTSMO is designed to enable estimation of the system coupled uncertainty in a preset amount of time. Unlike finite-time and fixed-time observers, the convergence time bounds of the designed observer are clearly given in the control design. Second, the reaching phase of the designed FATSMC is predefined-time stable, and the total settling time is free-will arbitrary time stable. Compared to the convergence time in the reaching phase obtained by constant updating in Pal et al. (2020b), the convergence time of the designed controller in the reaching phase can be pre-settable. Therefore, it avoids the excessive torques that result from achieving arbitrary time convergence by forcing the system state to converge rapidly to the origin in the sliding phase. Benefiting from the accurate estimation of the system coupled uncertainty, the designed control strategy avoids the overestimation of the upper bound of the external disturbance and thus reduces the system chattering.
The remainder of the paper is organized as follows. Some preliminaries and problem formulation are given in Section 2. In Section 3, we introduce the design of the controller and perform a stability analysis. Some numerical simulations and comparisons are given in Section 4, and the concluding remarks are summarized in Section 5.
Notation: In this paper,
2. Preliminaries and problem formulation
2.1. Some definitions and lemmas
Considering an autonomous dynamical system

(Pal et al., 2020a) For system (1), if there is a bounded continuously differentiable function
(Munoz-Vazquez et al., 2019) For system (1), if there exists a Lyapunov function

A system satisfying Theorem 2 is also called predefined-time stable. The difference with free-will arbitrary time control is that the total time of stabilization of the predefined-time control cannot be guaranteed, but only the stability of the system during the sliding phase or the reaching phase. Meanwhile, the settling time bounds of free-will arbitrary time control are less conservative compared to the predefined-time control.
2.2 Dynamic model of uncertain robotic manipulators
Consider the dynamic equation of n degree-of-freedom (DOF) rigid robotic manipulators as


The external disturbance of the robotic system consists mainly of frictional force, which is often bounded in the actual system. Therefore, it is reasonable to suppose the assumption that the coupled uncertainty of the system and its derivatives are bounded, and such assumption can be found in Jing et al. (2019).
3. Main results
In this section, a novel PTSMO and FATSMC are designed for uncertain robotic manipulator, respectively. Meanwhile, their stability is rigorously proved through the Lyapunov stability theory.
3.1. Design of PTSMO
Define the tracking error
The PTSMO is designed as




Considering the uncertain robotic manipulator (4) with the bounded external disturbance, the estimated disturbance error and velocity error under the PTSMO (6)–(9) can converge to zero within
Taking the derivative of (6), we can have Taking (10) into (7) yields Choose the Lyapunov function as Then, from (11), it can be obtained According to Theorem 3, the inequality (14) satisfies the predefined-time stability, and the estimated coupled uncertainty error will converge to zero within the settling time T
2
. When the estimated coupled uncertainty converges to zero, such as Choose the Lyapunov function Taking the time derivative of (16), then we can have





3.2. Design of FATSMC based on PTSMO
Our objective is to design a novel FATSMC scheme based on the PTSMO in (6)–(9) to guarantee that the uncertain robotic manipulator achieves tracking of the reference trajectory within an arbitrary preset time. Our findings reveal that it can guarantee that the system state converges to the sliding mode surface (SMS) within a given The phase plot of the system.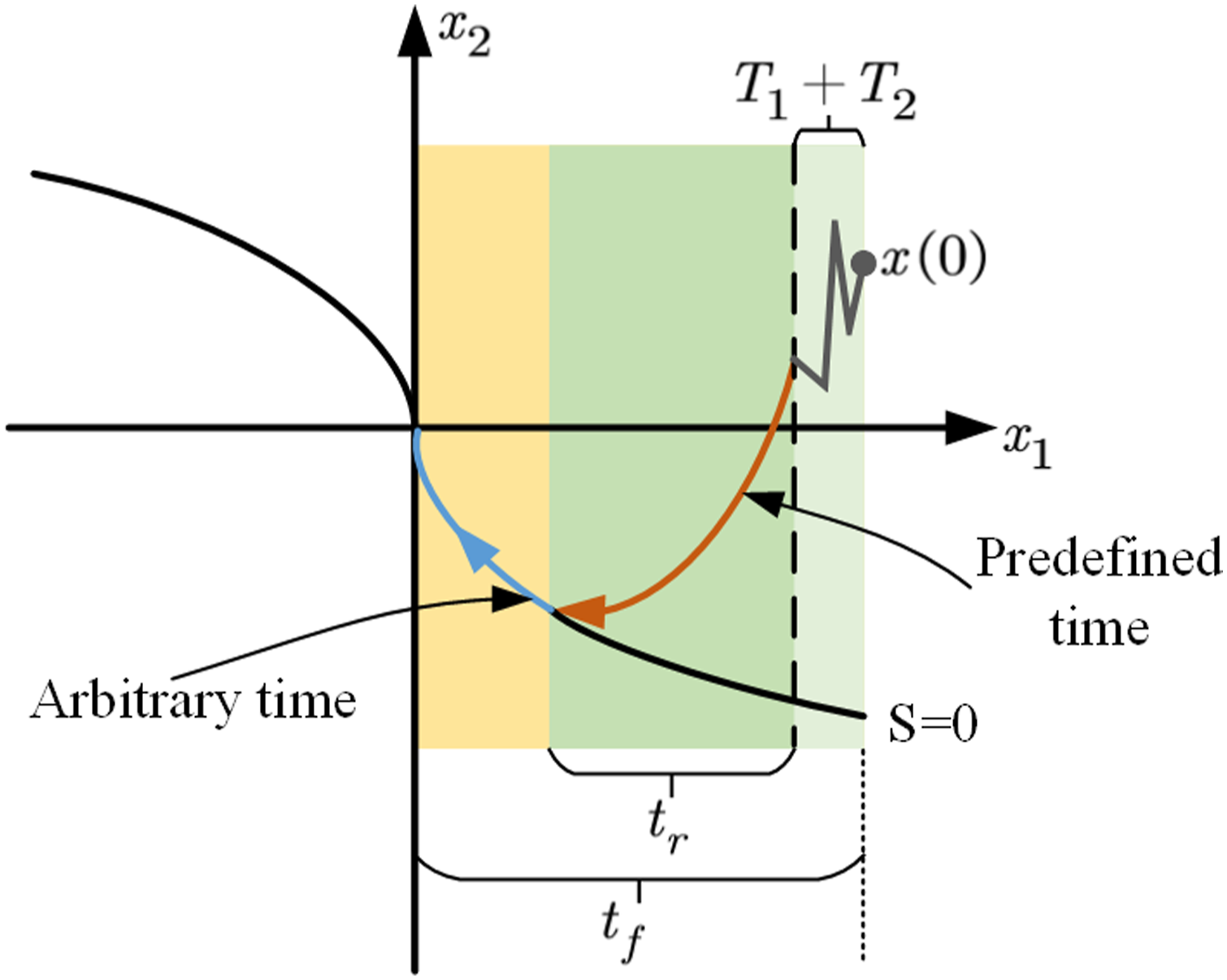
First, the SMS is designed as



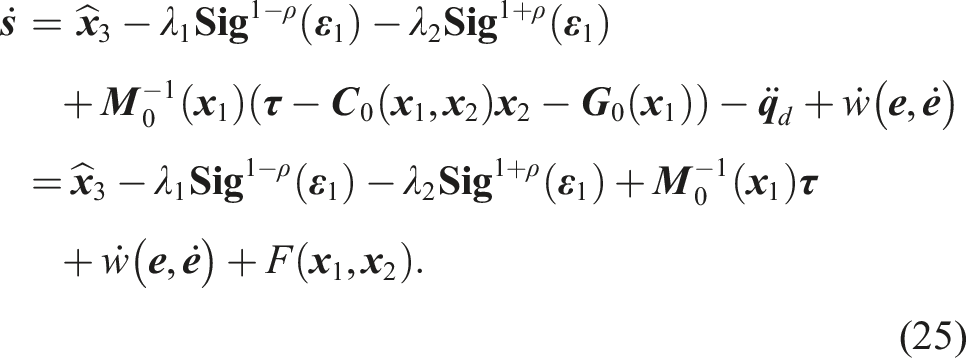
Then, based on PTSMO (6)–(9) and SMS (18), the FATSMC scheme is constructed as (21)

In (21),


The flowchart diagram of the FATSMC based on the PTSMO is presented in Figure 2. Block diagram of the proposed FATSMC based on the PTSMO.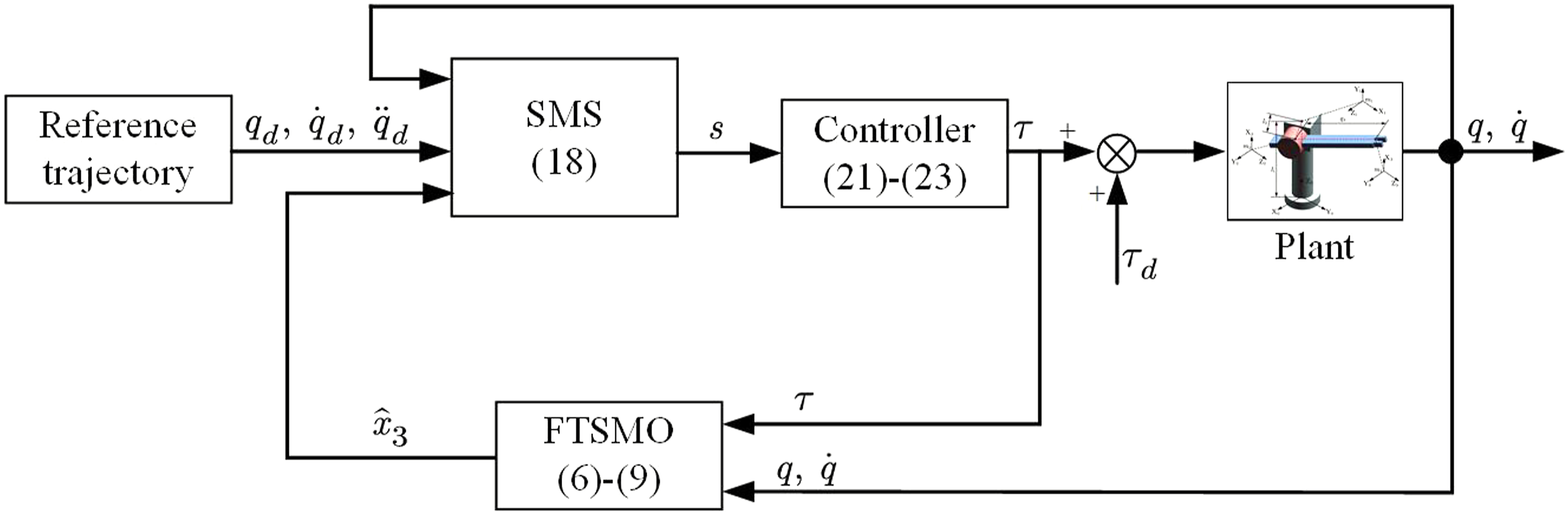
In practical model-based dynamics control applications of robotic manipulators, the main limitations on control performance are (i) knowledge of the upper bound of the robotic system model or dynamical system, (ii) system uncertainty and external disturbances, and (iii) the feasibility of control inputs (Boukattaya et al., 2018). For the proposed control strategy, neither accurate dynamics nor a priori knowledge of the upper bound of disturbances is required. Moreover, in general, the position and velocity of the robotic joints can be generally obtained by encoders or tachometers. Therefore, the proposed control strategy can be applied to the actual robotic control and does not suffer from harmful chattering. Modeling the dynamics of a multi-DOF robotic manipulator may be an essential challenge, but techniques such as neural networks may provide an effective way to address this problem.
With PTSMO (6)–(9), the uncertain robotic manipulator system (4) attains predefined-time stability in the reaching phase within
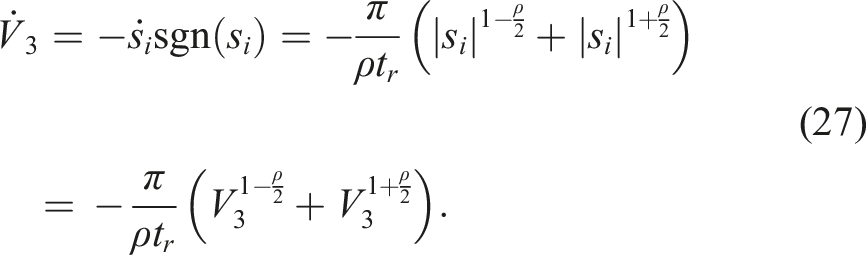
First, considering In the reaching phase, taking the time derivative of SMS (18), it can obtain that When Taking the control torque (21) into (25) derives to For any joint i, consider the candidate Lyapunov function as According to Theorem 2, it can draw that the SMS can be reached within the preset time Once the system tracking error is constrained to the manifold s
i
= 0, the following reduced-order dynamics can be obtained from (18) as According to Theorem 1, the position error e
i
and the velocity error Then, considering the stability analysis for t⩾t
f
, the SMC is switched to the linear surface Taking the control torque



Different from the free-will arbitrary time control strategy in Pal et al. (2020b), the reaching time in the proposed controller is explicit and independent of the initial state of the system. Therefore, reasonable t
r
and t
f
can be preset to avoid the high control requirements when the convergence time is close to t
f
.
Unlike the most existing predefined-time controllers (Jiménez-Rodríguez et al., 2017a, 2017b, 2019; Sánchez-Torres et al., 2018a), the actual convergence time of the proposed control strategy is more nonconservative compared to the preset convergence time, which facilitates the selection of a more reasonable settling-time parameter.
Besides the preset time parameters, only control parameters η, ρ, κ, and
The control parameters ρ in FATSMC can be different from that in PTSMO, but they are generally chosen to be 0.5 to simplify the control strategy. The settling time T
1
and T
2
should be chosen as small as possible to ensure that the observer is able to estimate the coupled uncertainty of the system quickly. However, too small T
1
and T
2
can lead to drastic changes in the value of the observer during the initial phase, which can affect the control performance of the controller. Similarly, a smaller t
f
means that the tracking error of the system can converge faster, but leads to an increase in the control torque and therefore requires a trade-off between the control performance and the control input.
According to (5), the proposed control scheme can be easily extended to a class of general dual integrator systems with the form of

4. Simulation and comparison
In this section, three numerical simulation examples are shown to illustrate the effectiveness and superiority of the proposed control strategy. The numerical simulations are programmed in Simulink of MATLAB R2020a, based on the Euler integrator and 10 −3 fundamental sample time.
As shown in Figure 3, a 3-DOF robotic manipulator (He et al., 2017) is considered. The robotic manipulator includes two rotary joints and a prismatic joint, and the two rotation angles of rotary joints are defined as q
1
and q
2
, and the translational of the prismatic joint is defined as q
3
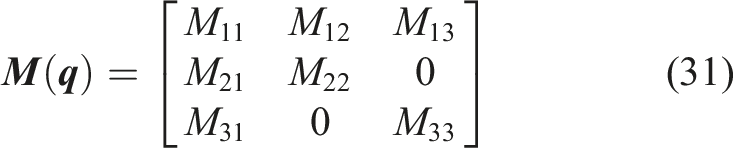
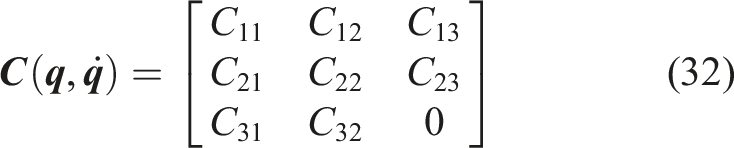
. The dynamics model of the robotic manipulator can be represented as Coordinate frame for each link utilizing D-H method.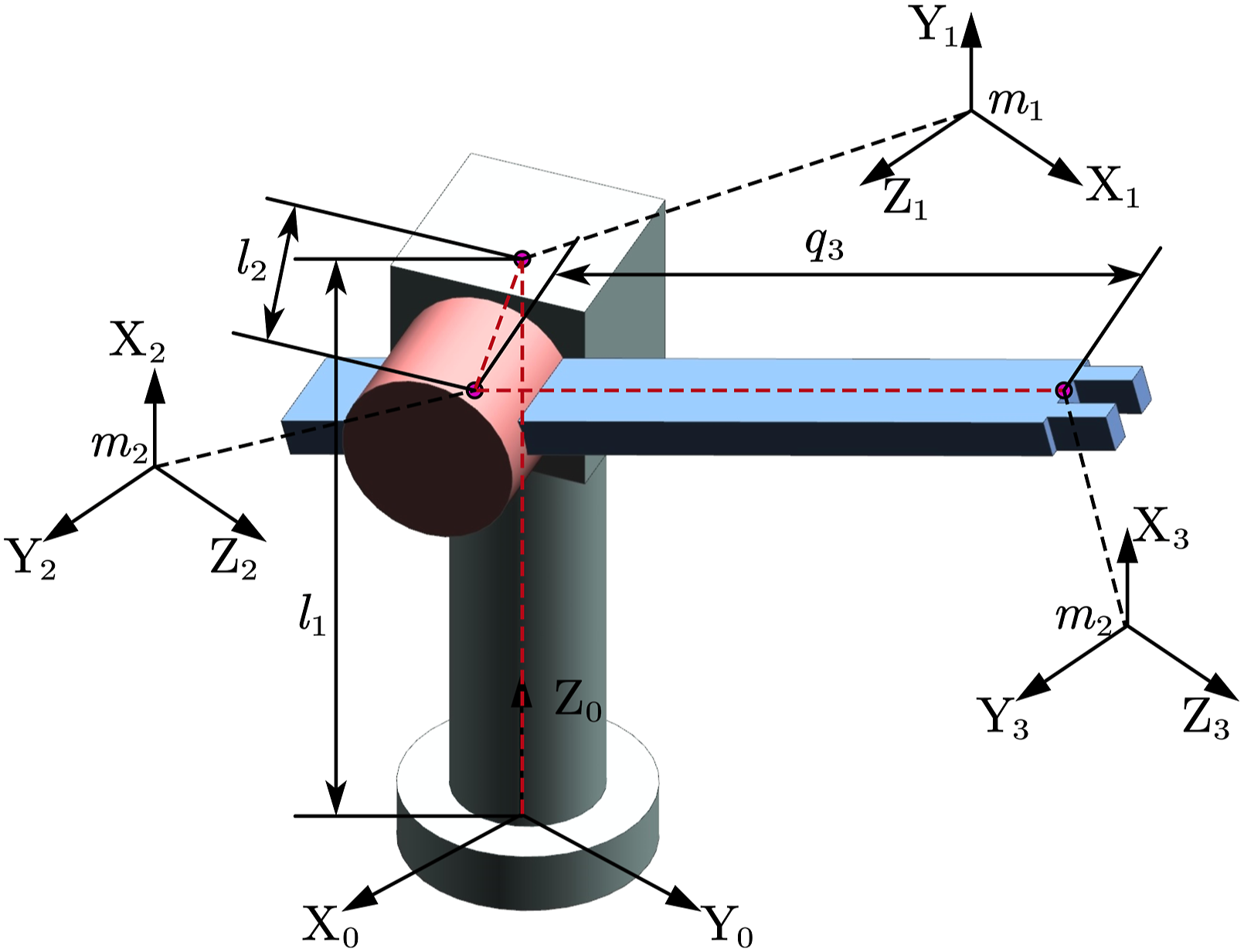
The control goal is to make the output Simulation results are shown in Figures 4–7. From Figures 4 and 5, it can be seen that the position errors and velocity errors can converge to zero when t = 3 s, which is consistent with the given settling time t
f
. Figure 6 shows that the proposed control strategy can guarantee the smooth control torque. Figure 7 shows that FATSMC based on the PTSMO can accurately estimate the velocity and coupled uncertainty of each joint accurately within the predefined time. This example illustrates the effectiveness of the proposed controller through different performance metrics.
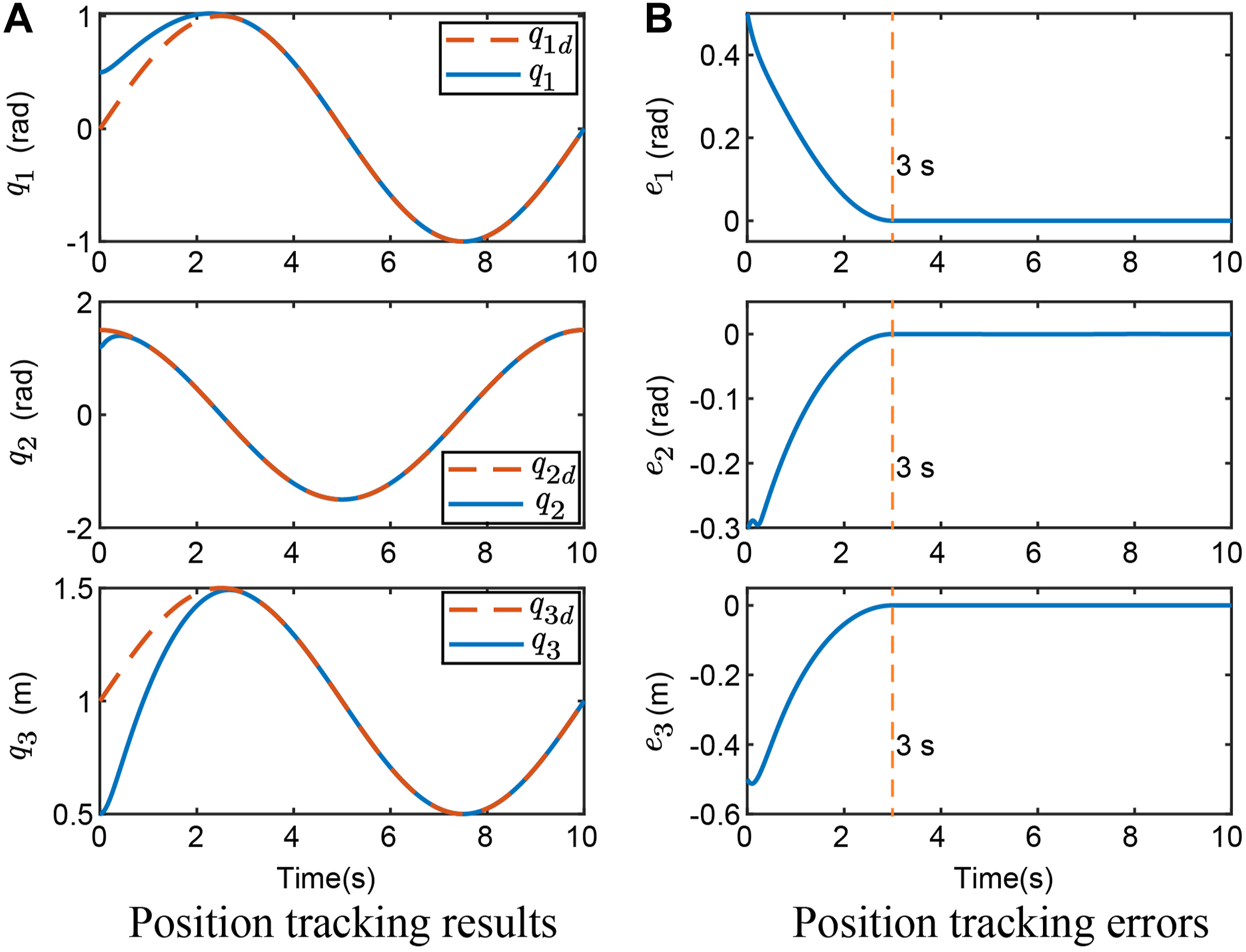
Position tracking results and errors.
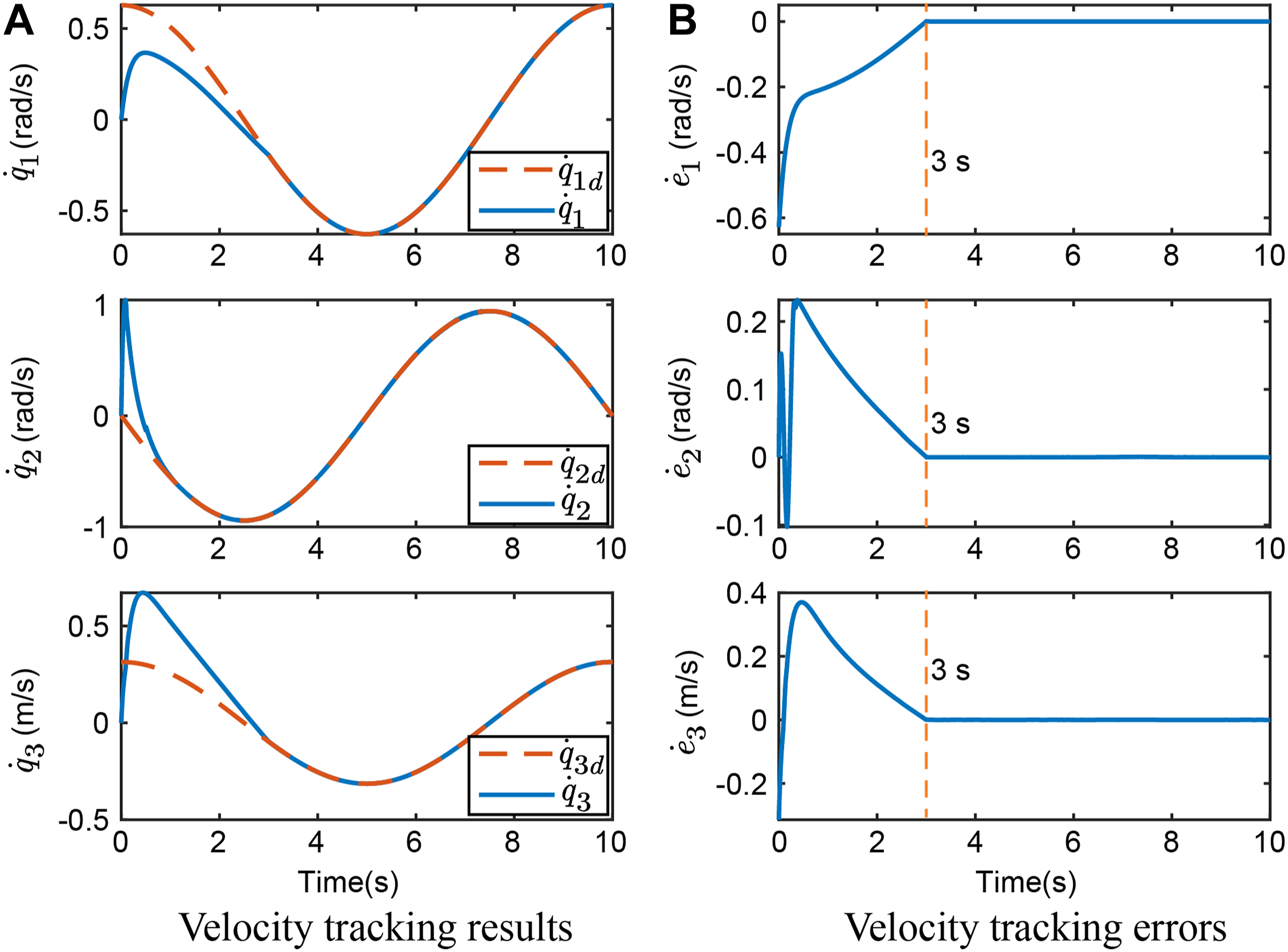
Velocity tracking results and errors.
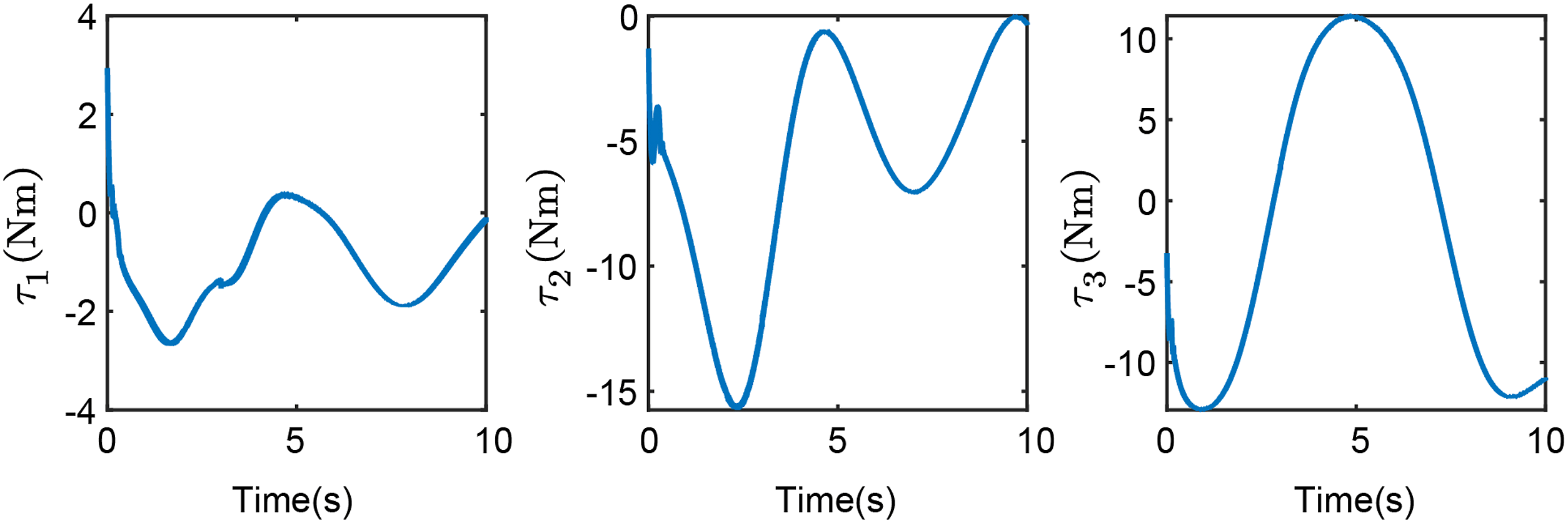
Control torque.
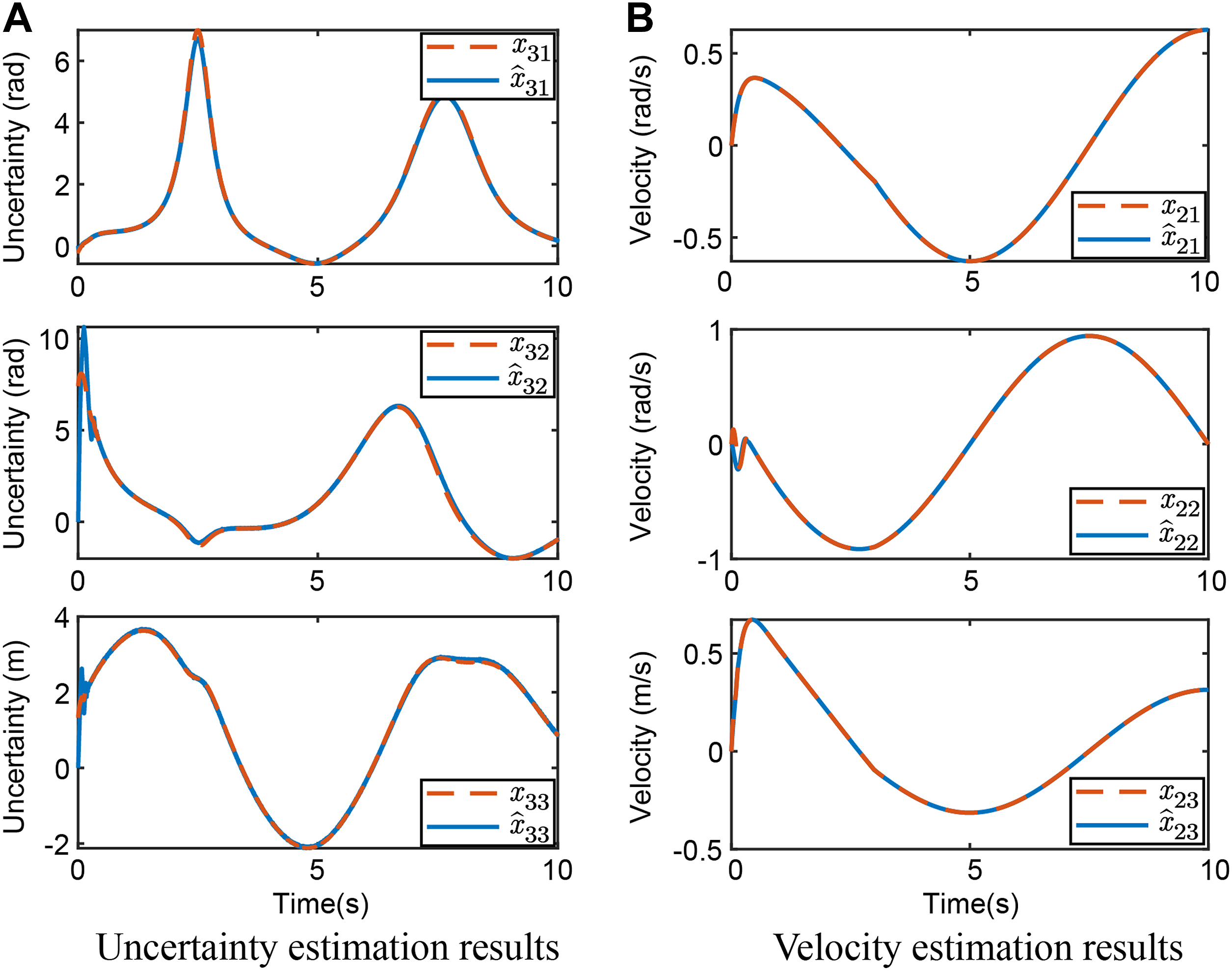
Uncertainty and velocity estimation results.
To further illustrate the free-will arbitrary time stability of the proposed controller, four different initial states are considered as Case 1: The simulation results are shown in Figure 8. It can be seen that the tracking errors can always converge to zero at t
f
= 3 s without changing with different initial states. Therefore, for operational tasks with strict time requirements, the initial state of the system is not required, and arbitrary time convergence of the robotic system can be achieved by choosing the parameter t
f
.
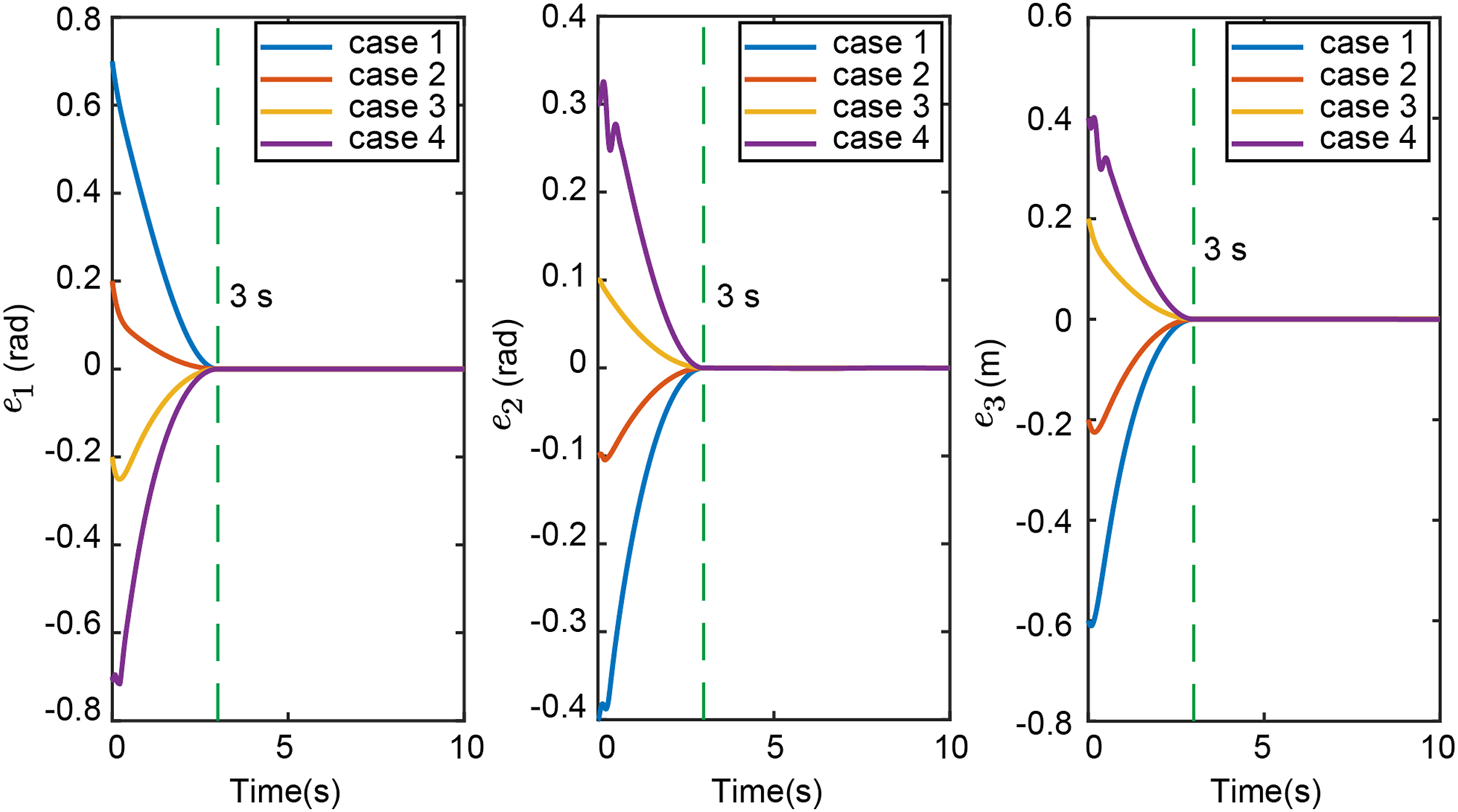
Position tracking results with different initial states.
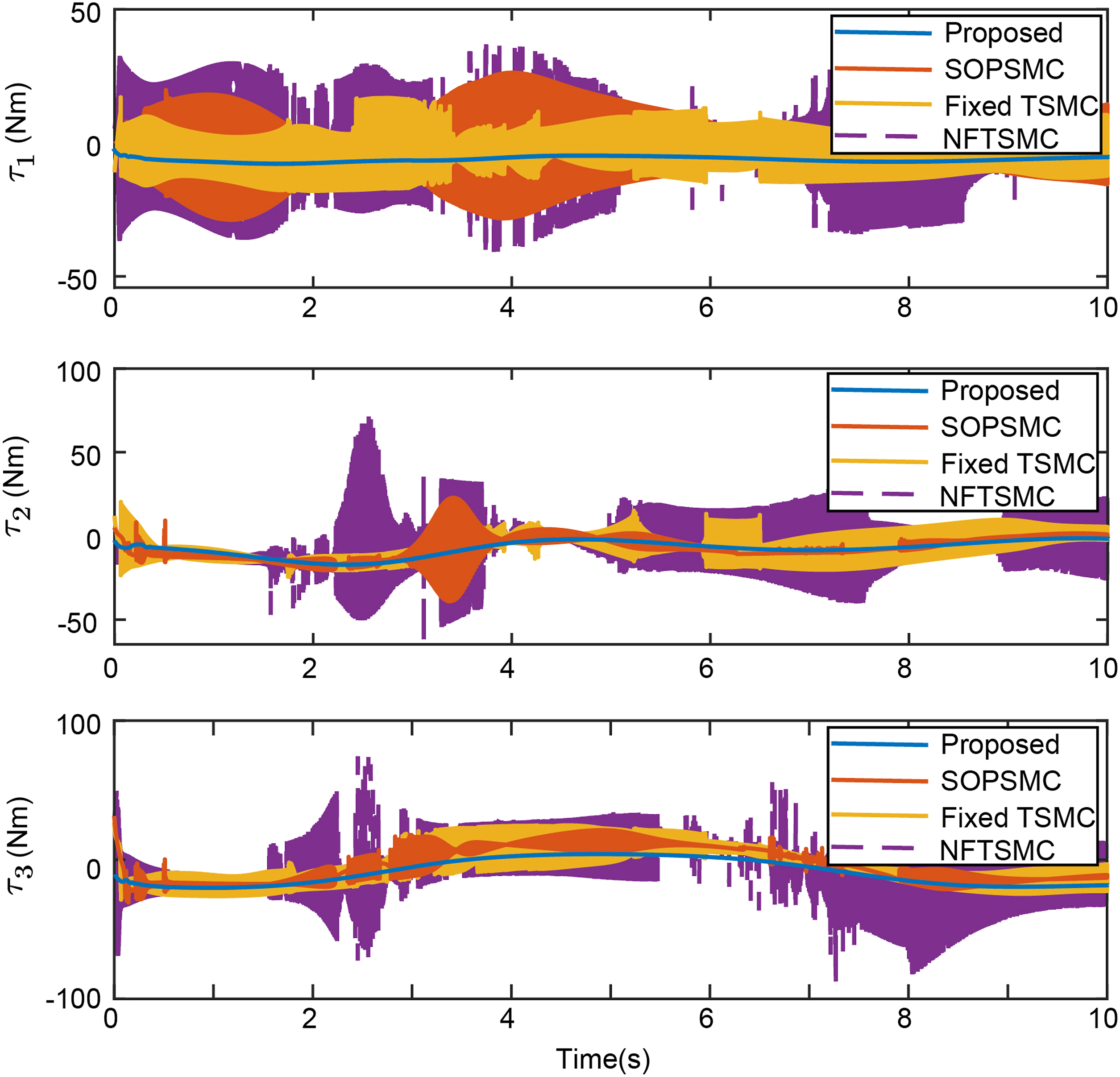
To further demonstrate the advantages of the proposed control scheme, several existing SMC schemes with different stability are utilized to compare with the proposed control scheme, including the nonsingular fast terminal SMC (NFTSMC) (Yang and Yang, 2011), the fixed-time terminal SMC (Fixed TSMC) (Zhang et al., 2019), and the second-order predefined-time SMC (SOPSMC) (Jiménez-Rodríguez et al., 2017a). For a fair comparison, the settling time in the SOPSMC was set to 3 s, and the boundary layer approach was not considered in all controllers. The initial state and the desired trajectory are used in Example 1. The simulation results are shown in Figures 9 and 10, and we can obtain that the proposed control strategy can obtain higher position tracking accuracy and significantly smoother control torque. As a predefined-time controller, the actual convergence time of SOPSMC is quite conservative as mentioned in Remark 4, compared to the preset settling time of 3 s. For the three existing control schemes, the signum function is used to suppress the disturbances. However, the discontinuity of the signum function leads to strong chattering. Comparison on tracking errors. Comparison on control torque. Moreover, as a finite-time stabilization controller, the actual convergence time of NFTSMC depends on the initial state of the system. For fixed-time controllers, there is a complex tuning relationship between the convergence time of Fixed TSMC and the control parameters. For most of the predefined-time controllers, such as SOPSMC, their stability time bounds tend to be very conservative, which leads to undesired convergence rates. The overall settling time of the proposed controller depends on only one control parameter, and the settling time bound is quite nonconservative. Besides, with the designed PTSMO, the priori knowledge of the upper bound of the coupled uncertainty is not necessary, and the chattering of the controller is avoided.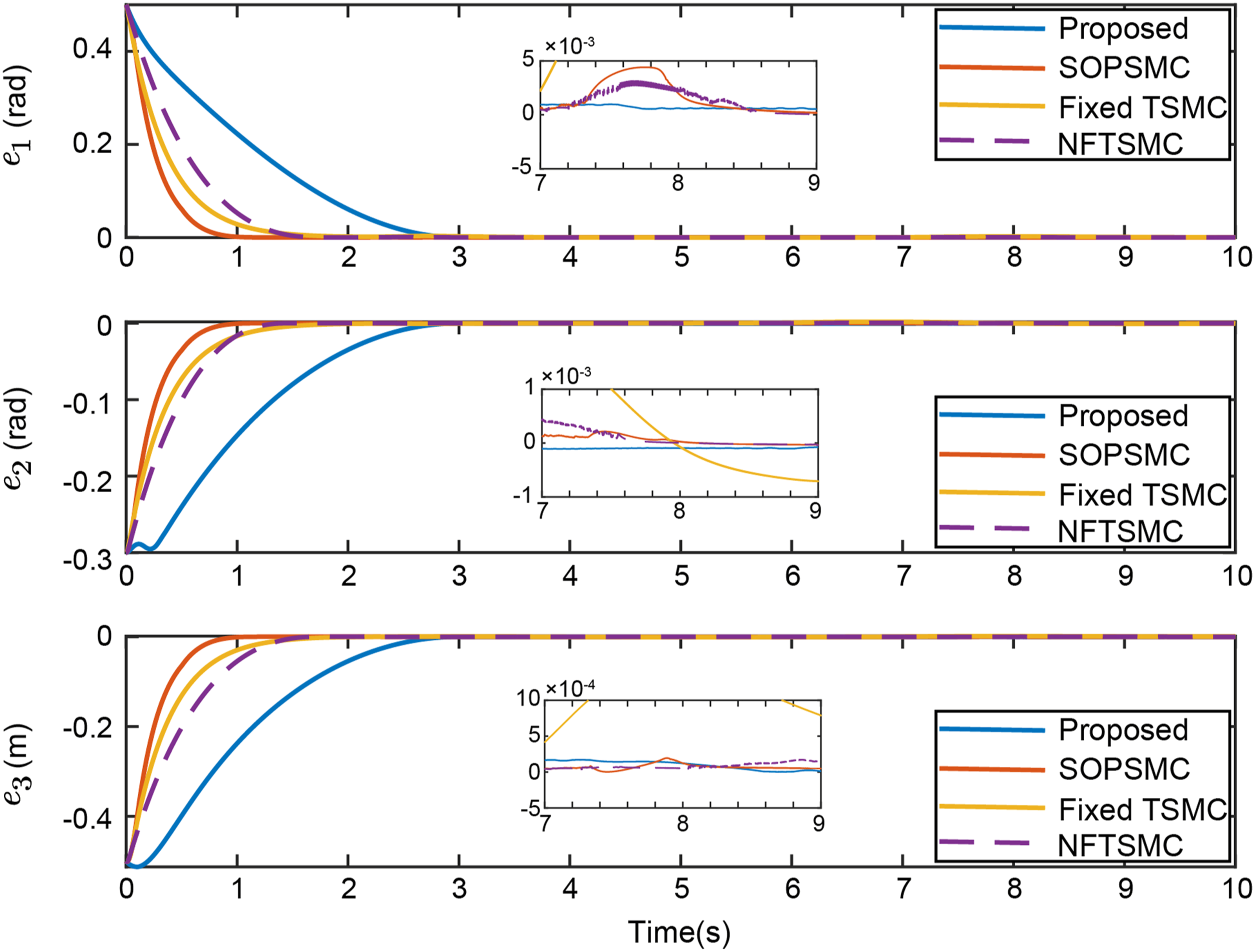
5. Conclusion
In this work, a FATSMC scheme based on the PTSMO has been presented for uncertain robotic manipulators. A novel PTSMO and FATSMC strategy are designed to guarantee free-will arbitrary time stability and the predefined-time convergence in the reaching phase for manipulators, which means that the total settling time of the system and the settling time in the reaching phase are available in advance. Additionally, the proposed PTSMO guarantees that the estimation of the coupled uncertainty of the system can be completed in a predetermined time and avoids a priori knowledge of the upper bound of the coupled uncertainty. Compared with existing SMC schemes, numerical simulation results show that the designed controller has higher tracking accuracy and less chattering while ensuring a less conservative actual convergence time with significant economic benefits. Some future work will mainly focus on the experimental evaluation of our approach by actual robotic manipulator systems to verify the availability of the proposed control scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China Under Grant No. 11972343 and Jilin Province Science and Technology Research Project Under Grant No. 20200404149YY.