
Abstract
Robust controllers are attracting considerable interest in control of dynamic systems due to their capability of eliminating parameterized or unparameterized uncertainties. Therefore, model based robust control law is proposed in this study for ride comfort enhancement and applied on a 7 degree-of-freedom full-car suspension system with friction non-linearity. Inertia, spring and damping forces of the system are modelled with parameterized uncertainties while friction forces and external disturbances are considered as unmodelled dynamics, namely, unparameterized uncertainties. To better understand the effectiveness of proposed controller, a dry friction model that has non-linear characteristics is used for analysis. Closed-loop stability of the system is achieved by using well-known Lyapunov Stability Theorem. To better evaluate the effect of proposed robust controller on ride comfort enhancement with successful road holding, extensive numerical analysis is performed and the results are compared with those of previous similar controller and passive suspension system. The effectiveness of proposed control method has been confirmed. Consequently, satisfactory results have been obtained proving that the ride comfort of a vehicle that has both parameterized and unparameterized uncertainties has been further improved with reasonable power consumption values for a vehicle in terms of economic viability.
1. Introduction
Robustness is increasingly becoming a key factor in control of dynamic systems. In recent years, there have been considerable discussions on robust control laws (Mirrashid et al., 2022), (Tian et al., 2022), (Dixit et al., 2022). They have been gaining much attention due to their capability of dealing with both parametric uncertainties and external disturbances (Franklin et al., 2021). Various adaptive (Zuo et al., 2004), (Sciavicco and Siciliano, 1996) robust (Zuo and Nayfeh, 2004), (Corless and Leitmann, 1981) approaches have been proposed to solve control issues arising from unknown system parameters, parametric uncertainties or external disturbances.
Preliminary work in this field focused primarily on robust control of robotic manipulators with parameterized uncertainties (Spong, 1992), (Keun-Mo Koo and Jong-Hwan Kim, 1994), (Liu and Goldenberg, 1994). In their subsequent analysis, Liu and Goldenberg (1996), have made a clear distinction between ‘parameterized uncertainty’ and ‘unparameterized uncertainty’ for robot manipulators. Some system parameters such as payload variations have been considered with parameterized uncertainties and distinguished from unparameterized uncertainties. Additionally, unmodelled joint frictions and unknown external disturbances have been grouped as the unparameterized uncertainties. Integral-based and saturation-based robust compensators were designed for parameterized and unparameterized uncertainties, respectively.
Few researchers have addressed the problem of suspension friction. In their study, Yabuta et al. (2007), analysed how suspension frictions affect the ride comfort of a vehicle. Yagiz et al. (2008), designed a fuzzy-sliding mode controller to increase the ride comfort of a vehicle that has dry friction non-linearity. Marino and Cicirello (2022) examined the effect of dry friction on the dynamic behaviour of MDOFs vibrating system. With this in mind, one can easily say that the non-linear suspension friction can be considered as an external disturbance for a control system.
Quarter-car suspension system has been widely used in the field of vehicle vibrations thanks to its simpler mathematical model and being an easiest model for application of a controller (Al Aela et al., 2020), (Gao et al., 2022). A recent review of the literature on this topic showed that a half-car or full-car suspension system can easily be controlled by using quarter-car suspensions (also known as decomposed vehicle model) derived from these systems. Thus, body bounce, pitch and roll vibrations would be controlled at once (Zhang and Alleyne, 2003), (Mitschke and Wallentowitz, 2004).
In their ground-breaking studies, Zuo et al. proposed “Model Reaching Adaptive Controller (MRAC)” for active vibration isolation systems using a skyhook isolator (Zuo et al., 2004), (Zuo et al., 2005), (Zuo and Slotine, 2005). A controller with a dynamic manifold that includes ideal skyhook target dynamics was designed instead of using an error. A key problem with similar studies is need for higher controller gains. It is well-known that due to practical hardware issues such as high frequency dynamics and actuator saturation, using higher gains are not preferable (Liu and Goldenberg, 1994), (Liu and Goldenberg, 1996). An additional problem with above-given controller on full-car suspension system is that the results on time domain are remarkable while those of frequency responses are not reasonable. Moreover, it is not sensitive to disturbances. Accordingly, a robust controller is proposed in this study to achieve the stability of a vehicle suspension system in the presence of parameterized and unparameterized uncertainties by using lower controller gains which are more preferable for real applications. This proposed method prevents using higher gains and remedies the disadvantages dedicated to them.
Consequently, the main motivation is to enhance the ride comfort of a vehicle without leading suspension working space lose by eliminating the effects of uncertainties on mass, spring, damper, and to deal with the non-linear friction forces or unknown any type of disturbance by proposed a robust controller that consumes power in reasonable ranges. So, this study is divided into four sections. The proposed control law and the closed-loop stability of system are outlined in the second section. The third section analyses the numerical solutions and focuses on the results in detail to evaluate the performance and effectiveness of proposed control method. Finally, concluding remarks on how the proposed controller is successful and viable are briefly presented in fourth section.
2. Model based robust control law
Considering aforementioned robust and robust-adaptive approaches, in this study, model based robust controller (MBRC) is proposed for vehicle active suspension systems and its stability is demonstrated in this section by using Lyapunov Stability criterion.
Vehicle suspension systems can easily be controlled by using decomposed independent suspension technique. In this technique, total mass of the vehicle can be decomposed into the independent quarter-car suspension models. Thus, vehicle vibrations would be attenuated in a simpler and effective way by using independent quarter-car control, also known as suspension ends control. In addition to this, the motion of unsprung mass can be considered as external disturbance during control action as shown in Figure 1 (Zhang and Alleyne, 2003). Consequently, this technique has been suggested for the current study since it seems to be a useful approach in vehicle active suspension systems. For this purpose, an independent quarter–car suspension model is presented in Figure 1. Active suspension system with disturbance rejection.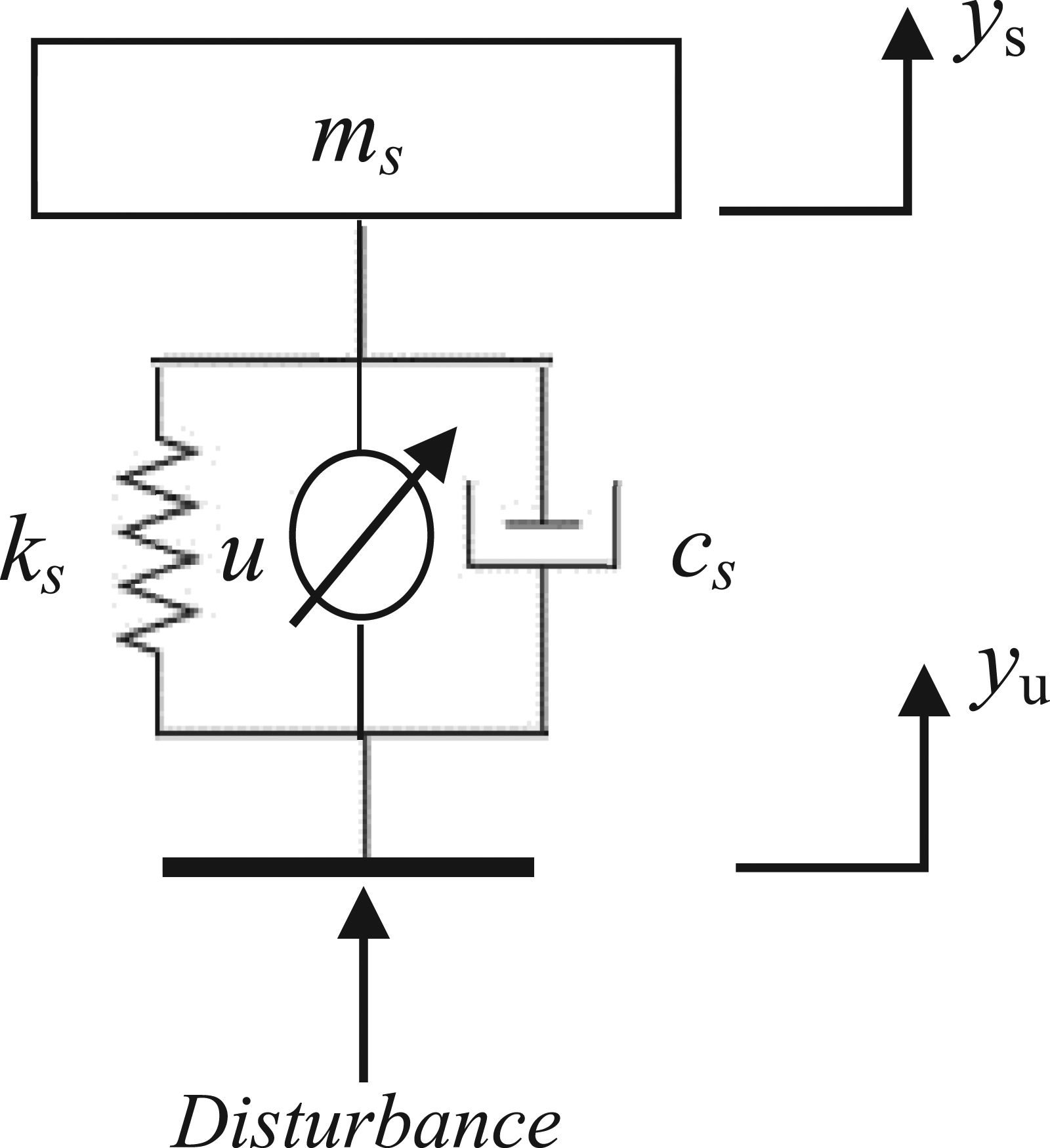
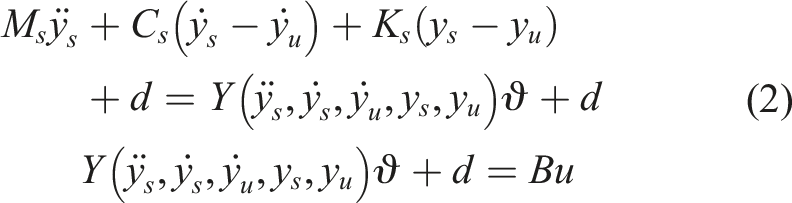
The equations of motion for an active suspension system which has n suspensions, can then be written as (Zuo and Nayfeh, 2004):

Afterwards, equation (1) can be rewritten as follows:


Then, error dynamics


Using equations (1), (2) and (4), following equation is obtained:


It is common knowledge that unparameterized or unmodelled system uncertainties are not constant. So, it is bounded as presented in below given equation:

In this study, it is assumed that the upper bound

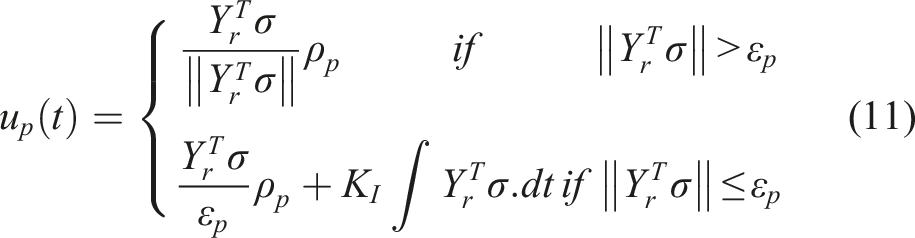
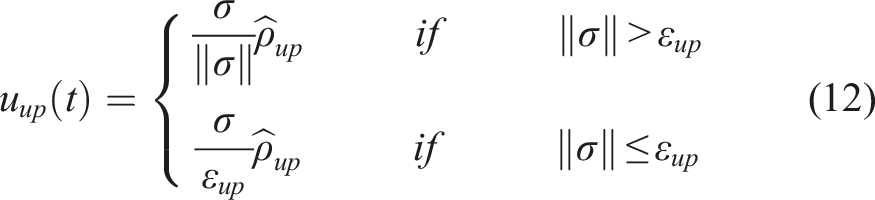
Taking the control law (4) into account, a theorem is given to ensure the stability of closed-loop system:
Let Consequently, the control inputs

A Lyapunov function is defined so as to prove the above-given theorem: Afterwards, the time-derivative of Lyapunov function is written as: Substituting equations (7) and (13) into the equation (15) yields: Using aforementioned knowledge, there are 4 different cases that should be taken into consideration so as to analyse stability familiar with the studies in (Liu and Goldenberg, 1996). 1st Case: If Then, equation (17) is rearranged as: Finally, the following equation is obtained from equation (18): 2nd Case: If Then equation (20) is rearranged as: Finally, the following equation is obtained from equation (21): It is crucial to note the last term This yields 3
rd
Case: If It is worthy to note that Afterwards, the time-derivative of Lyapunov function is written as: Substituting equations (7), (13), (27) and (28) into the equation (29) yields: Afterwards, if Then, this equation takes the following form after some arrangements: Thus, it is shown that 4th Case: If Then, if this equation is rearranged in the following form: Thus, the values of This yields




















3. Numerical analysis and results
In order to check the performance of proposed controller, numerical analysis is carried out and obtained results are presented in this part of study. To that end, a 7 degree-of-freedom non-linear full-car active suspension physical model is illustrated in Figure 2. The proposed controller is designed based on four independent quarter-car suspension control derived from this full-car suspension model. Thus, body bounce, pitch, roll motions and their accelerations can be easily controlled using this technique. The idea behind this phenomenon is that if the four suspension gaps go to zero independently, then, the motion of centre of gravity, pitch and roll motions of vehicle will go to zero, as well. Full-car with active suspensions.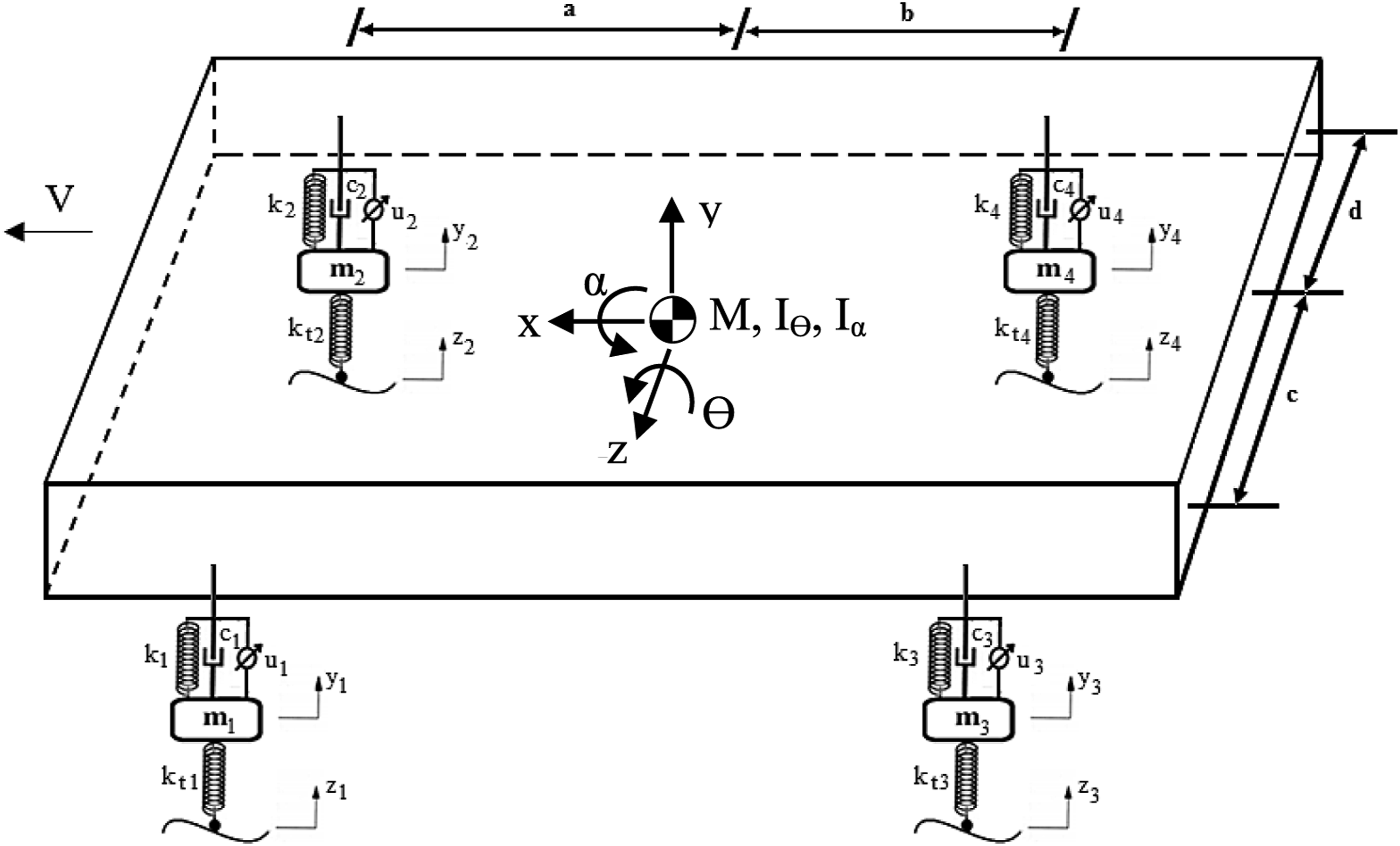
Herein, y denotes body bounce, Ө and α denote pitch and roll motions of vehicle body, respectively. In addition to this, z i stands for road surface input and u i stands for controller force where i = 1, 2, 3, 4. The numerical parameters of full-car model and their descriptions are presented in Supplemental Appendix A. Additionally, mathematical model of full-car active suspension system is provided in Supplemental Appendix B.
The desired signal for each suspension upper end is provided in equation (38). This method was chosen because it is one of the most practical ways to avoid suspension working space lose problem:

Using the expressions described above, the proposed model based robust controller is implemented on a 7 degree-of-freedom full-car active suspension system. The numerical values of controller parameters are provided in Supplemental Appendix C. The optimum controller parameters have been found by trial and error keeping in mind reducing these numerical values facilitates the real life applications due to practical reasons such as control input magnitude limitations.
On the other hand, considering (Spong, 1992), it is assumed that the system parameters

Then, the change in stiffness and damping coefficients shown in equation (40) are assumed to be given within the following intervals (Nguyen et al., 2000):

On the other hand, change in the mass (

Nominal control parameters.
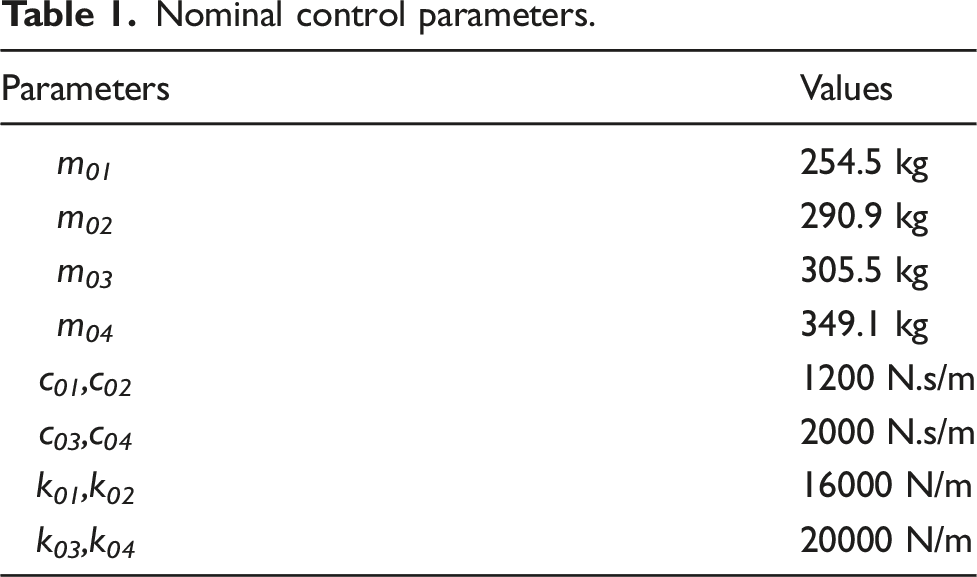
By using Table 1, upper bound of parametric uncertainties is calculated using below given equation (Burkan et al., 2018):
Upper bounds of parametric uncertainties.
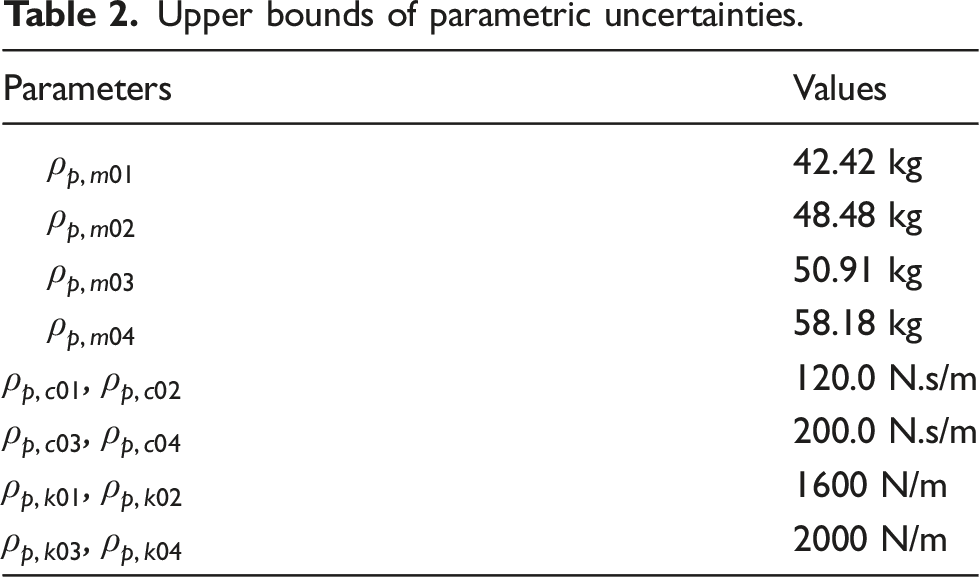
It is crucial to note that Table 2 lists the constant upper bounds of parameterized uncertainties. With this in mind, it is obvious to the reader that upper bounds for unmodelled friction forces or external disturbances are assumed to be exactly unknown. Instead, they have been made adaptive using an upper bound estimation algorithm that is given in equation (13). Thus, for instance, it is not necessary in this study, to calculate exact value of upper bound for friction forces which is not an easy matter to calculate. This can be evaluated one of the principal advantages of proposed controller.
By using above-mentioned details, extensive numerical analysis is performed in this part of the study. So, a limited-ramp road input with a certain elevation, is used in the current study (refer to Figure 3), in particular, to check whether the proposed controller causes the suspensions to degenerate or not. Road surface.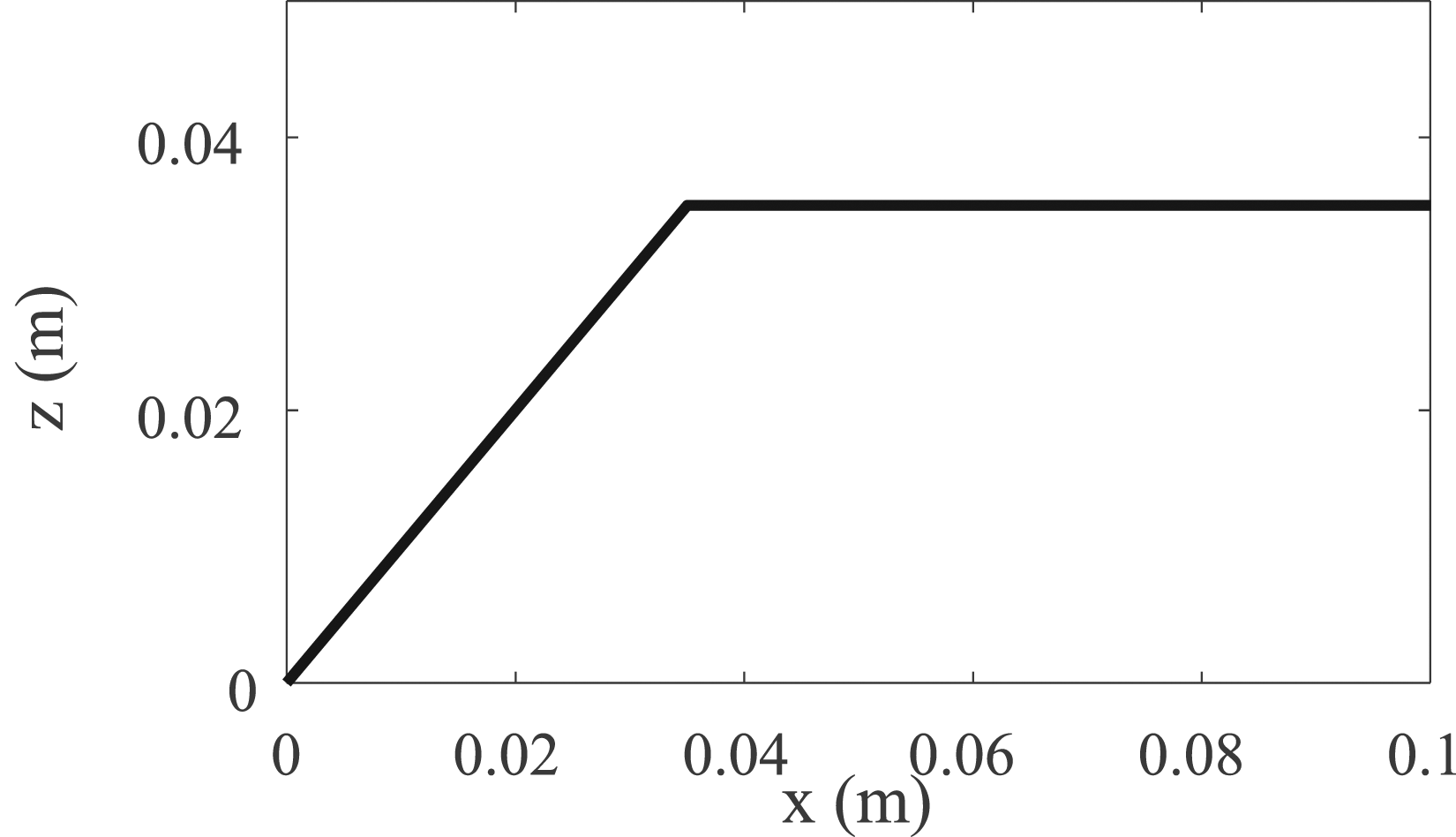
Numerical analysis was performed to test the performance of controller and obtained results were provided in Figures 4, 5, 6, 7, 8, 9,10, 11, 12, 13 and 14. Given that the primary goal of the current study was to enhance the ride comfort in the presence of parameterized uncertainties and unmodelled external disturbances, such as friction forces, any reduction in vibrations come into focus. It is common knowledge that if the peak values of vibrations are reduced, the ride comfort will then be enhanced. With this in mind, the body bounce, pitch and roll displacements and their accelerations are presented in Figures 4, 5 and 6, respectively. Body bounce of sprung mass. Pitch of sprung mass. Roll of sprung mass. Suspension displacements; (a) front left, (b) rear right. Control forces; (a) front left, (b) rear right. Frequency response of body bounce (a) and its acceleration (b). Frequency responses of pitch (a) and roll accelerations (b). Frequency response of dynamic tire loads; (a) front left, (b) rear right. Frequency responses of vehicle body for different loading conditions. Power consumption of actuators; (a) front left, (b) rear right. (a) Body bounce of sprung mass with broken front left spring, (b) Frequency response of body bounce with different gains.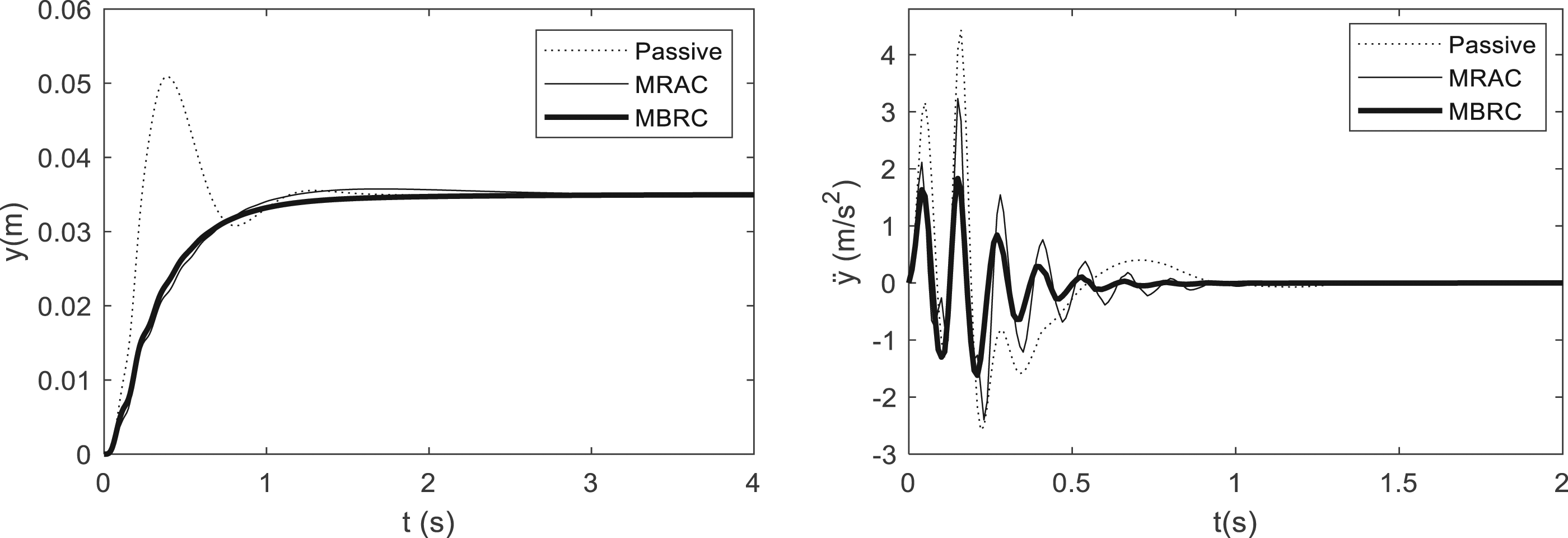
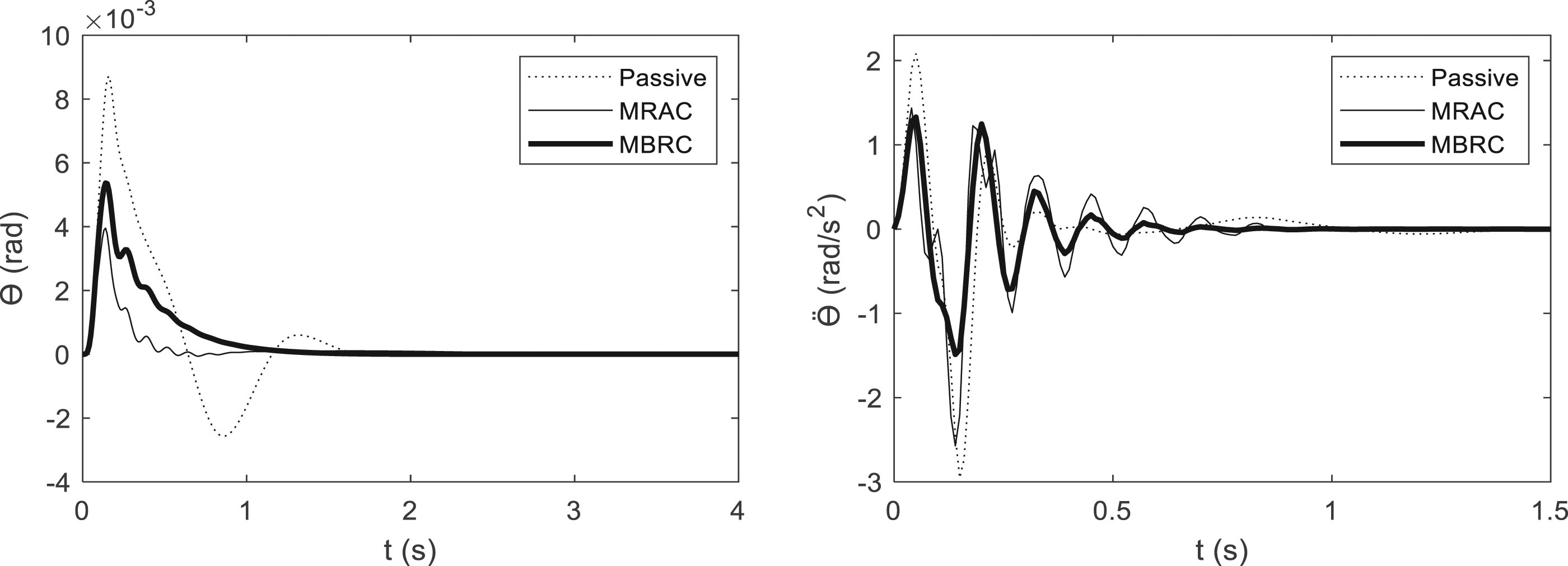
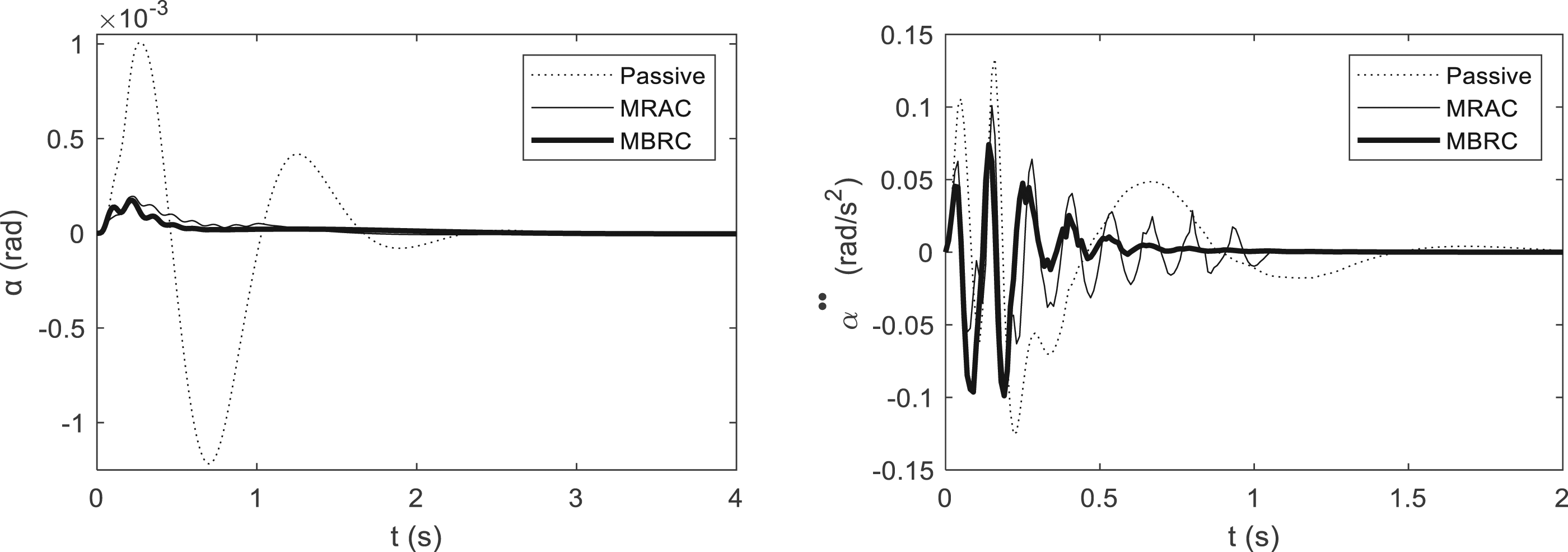
The results on vibration attenuation and settling time in figures reveal that both displacements and accelerations have been remarkably reduced by proposed robust controller. That is, it can be clearly observed that the peak values of amplitudes are lower than those of MRAC and passive ones. On the other hand, MRAC gives better results on pitch displacement given in Figure 5. As the focus of the study was on the passenger comfort, these findings confirm how successful the proposed controller is.
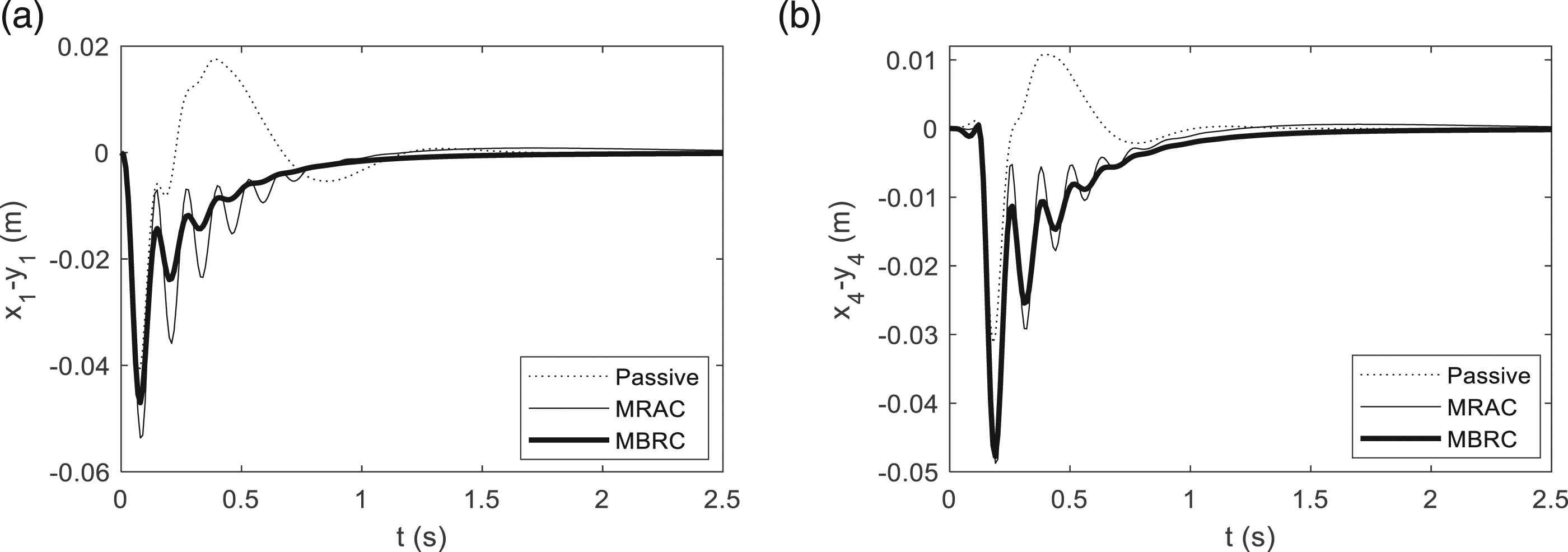
The time response for suspension deflections is presented in Figure 7. It is crucial for a controller to maintain the initial position of suspension. On the contrary, any lose in working space of the suspension may lead a possible suspension lock resulting the passengers to feel discomfort. As can be seen from the figure that all suspension displacements return to their initial positions as soon as vibrations end. Furthermore, as anticipated, it is observed that the peak values of suspension displacements are increased by proposed controller. This is in good agreement with the literature since it is well-known that if the peak values are increased, then ride comfort will be increased, as well. Accordingly, the achievement of the proposed controller on ride comfort enhancement has been further confirmed with no suspension degeneration.
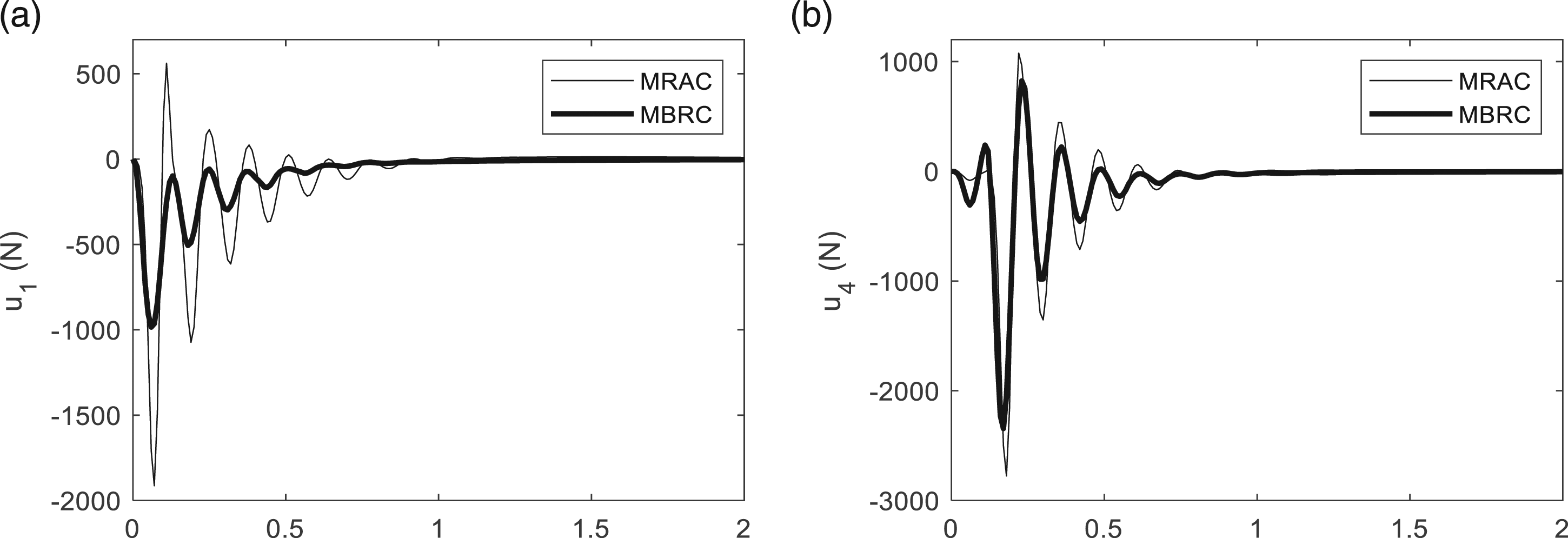
For a passenger car, an actuator produces controller forces within the reasonable values due to physical capabilities. For this purpose, all actuators are constrained in such a way that they can produce controller forces (u i ) within the range of ± 4000 N (Yagiz et al., 2008). A key problem with much of the controllers is that they can cause sharp changes or jerks resulting in chattering issue that is a common phenomenon in vehicle vibrations. Besides, the chattering issue can be destructive for mechanical parts of the vehicle. In order to investigate these mentioned concerns, time histories of controller forces for actuators are given in Figure 8. This figure clearly shows that no chattering observed and the actuators need the controller values within the given range. Besides, it is fundamental to note that much higher values are needed by MRAC than those needed by MBRC. This comparison has revealed that satisfactory results are obtained by MBRC in terms of controller forces needed.
Since the vehicle suspension system that is used in current study is non-linear, this system should be linearized to evaluate the performance of proposed controller on the frequency responses. It is obvious from equations of motion that the full-car suspension system has non-linear characteristics due to trigonometric functions and dry friction non-linearity. In an attempt to obtain linearized model, following methodology has been utilized. First, the system has been linearized at around initial conditions where the Ɵ≈0 and α≈0 then, sinusoidal describing function technique is used to obtain equivalent viscous damping coefficient 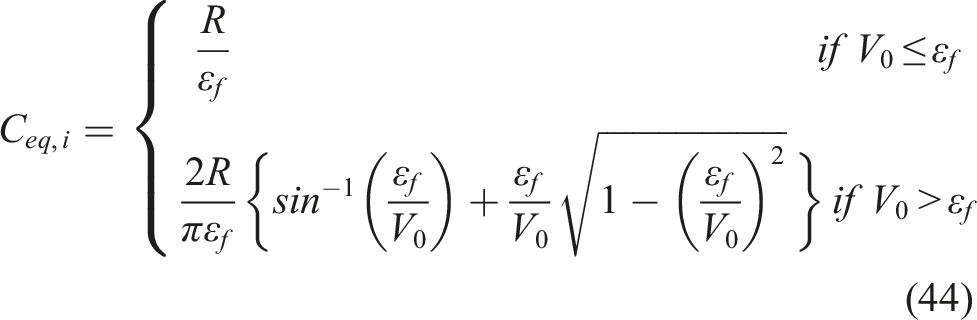

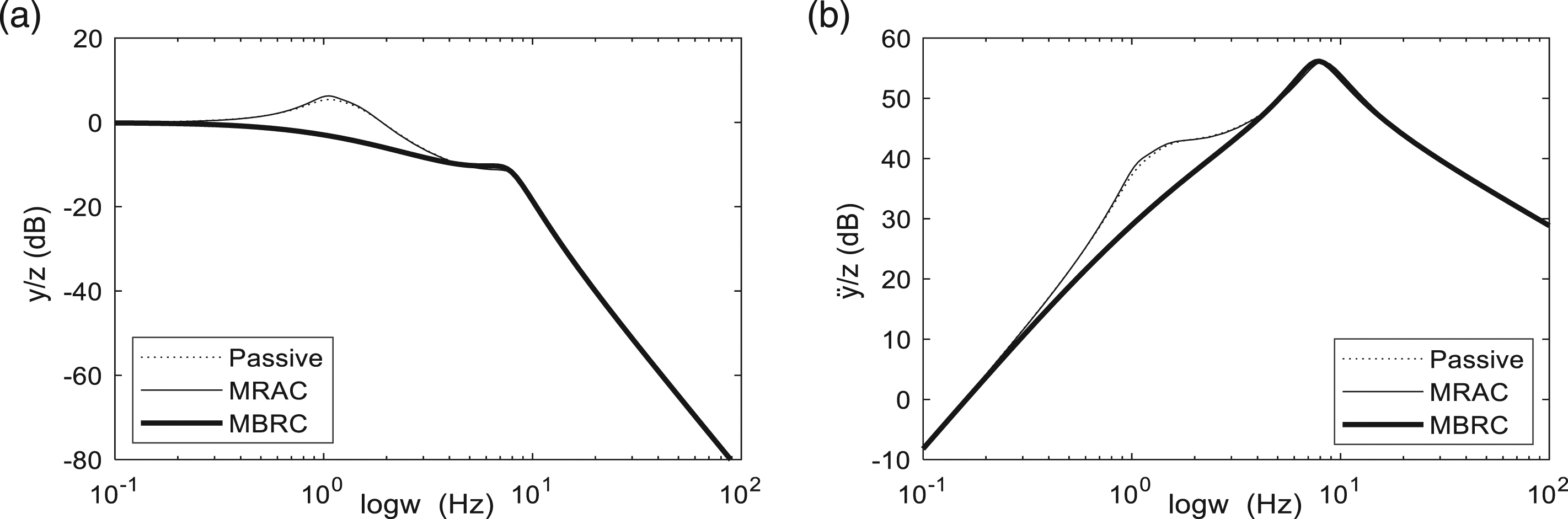
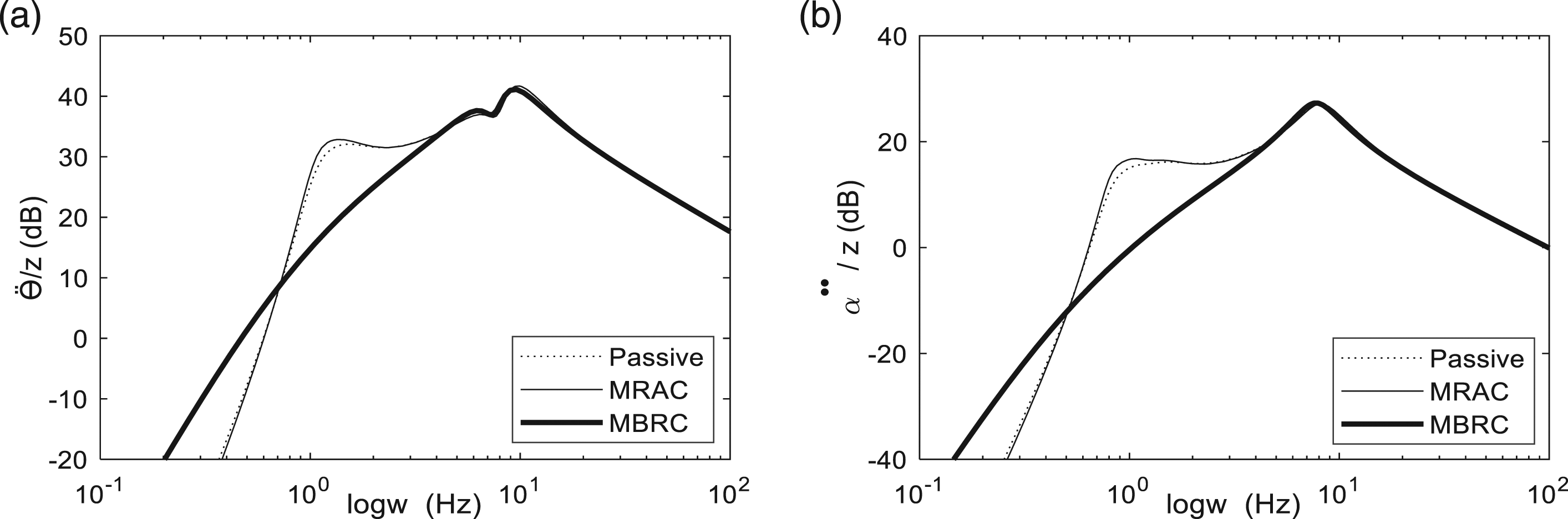
Thus, the linear model of dry friction is obtained along with the calculated value of equivalent viscous damping coefficient. Afterwards, the frequency responses have been evaluated using the linearized model. It is crucial to note that the frequency responses give broad information on vehicle ride comfort, so have great importance in the field of vehicle dynamics. Therefore, resonance frequencies at around 1 Hz which is due to sprung mass should be attenuated for vehicle ride comfort enhancement without any deterioration in resonance frequencies at around 10 Hz which is due to unsprung mass. To that end, the frequency responses of body bounce, pitch and roll motions with their accelerations are given in Figures 9-10. These figures show that the clear improvement on ride comfort enhancement has been achieved with no significant deterioration in road handling characteristics, proving that vehicle ride comfort has been enhanced and satisfactory results have been obtained since the resonances at around 1 Hz are significantly attenuated by proposed controller. Moreover, it is observed that no any undesired resonances at higher frequencies are occurred. This implies that the proposed controller has significant role and clear advantage on reducing the vehicle vibrations even if lower gains are used. Furthermore, it is obviously seen that the frequency responses of MRAC is similar to those of passive system although higher gains are used. If different and much higher gains are used, undesired resonance frequencies are observed (Figure 14 (b)).
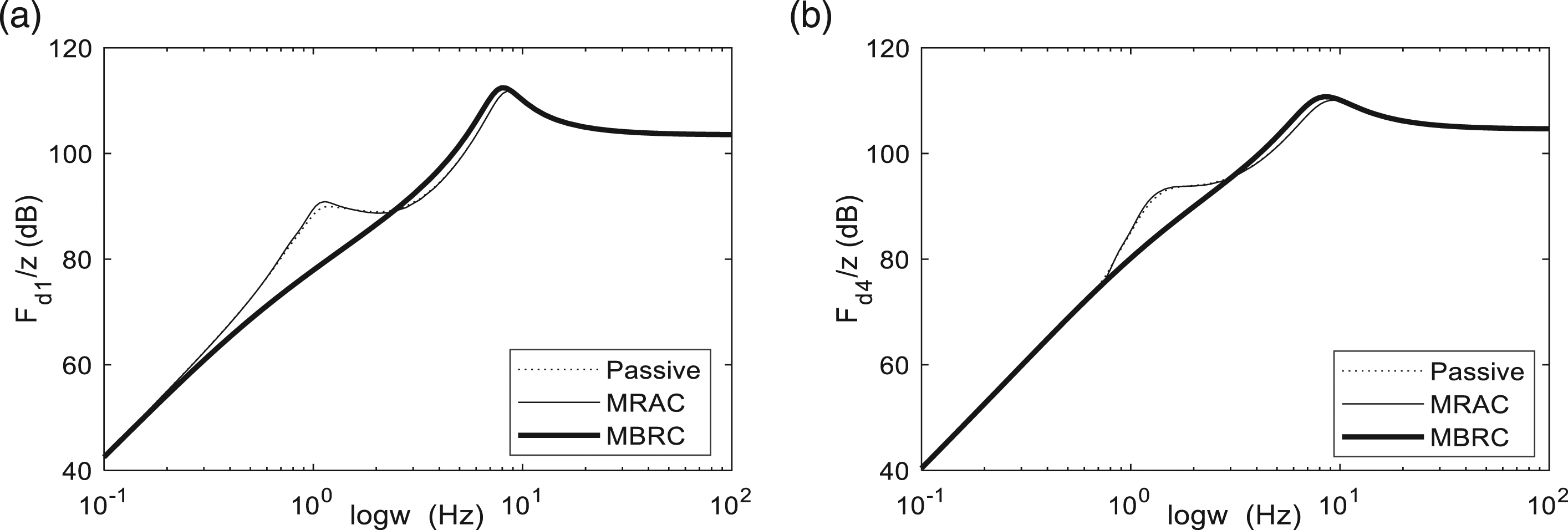
Ride comfort and road handling are always two conflicting criteria in vehicle dynamics. Thus, there must be a trade-off between ride comfort and road handling performances of vehicles, the frequency responses of dynamic tire loads are need to be evaluated for road handling characteristics (Figure 11). It is apparent from the figure that the findings validate the success of proposed controller on ride comfort enhancement without remarkable deterioration in road handling while MRAC behaves like passive system on frequency responses.
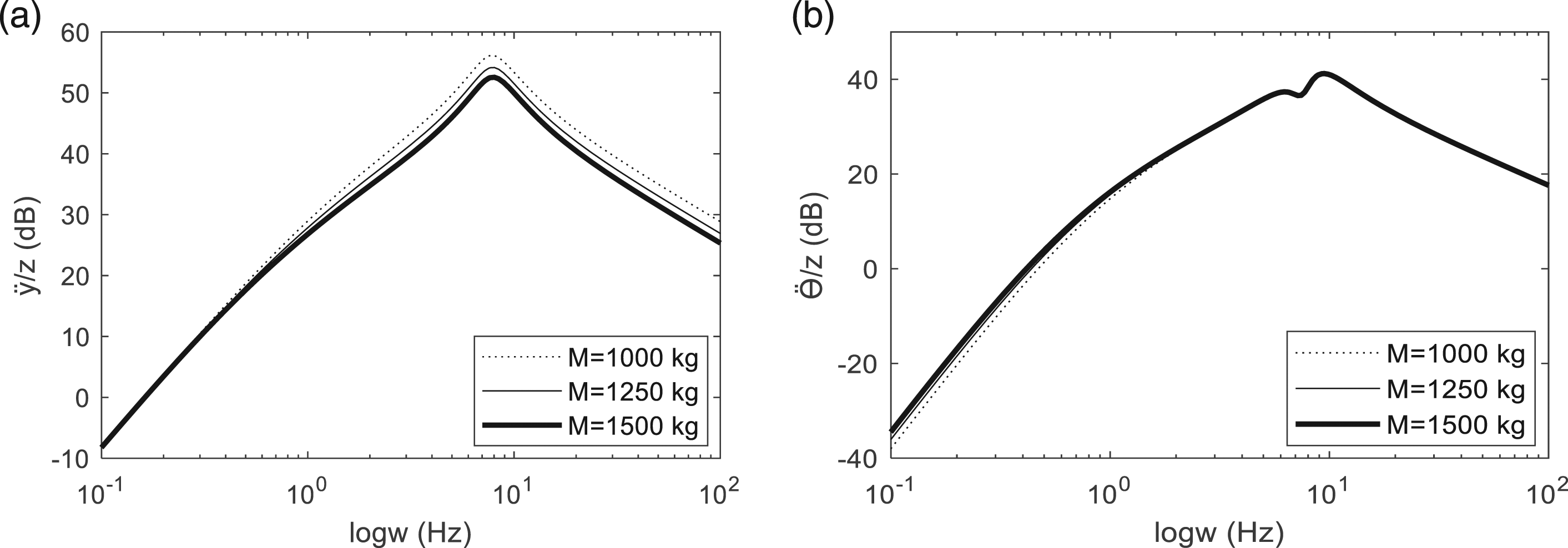
During the control action, the exact value of vehicle mass may not be calculated, that is, it can be exactly unknown. For instance, additional luggage, changing passenger numbers, supply and consumption of fuel cause the mass to change. Additionally, one cannot guarantee to calculate the exact values of damping and stiffness characteristics, as well. That is, there is always some parametric uncertainties on the vehicle suspension components. The number of passengers and the mass of the luggage change the vehicle body weight. In order to verify the robust behaviour of designed controller, frequency responses of body bounce, pitch and roll accelerations for different sprung mass values are given in Figure 12. It is apparent from the figure that highly satisfactory results have been obtained by the proposed controller demonstrating the insensitiveness towards parametric uncertainties.
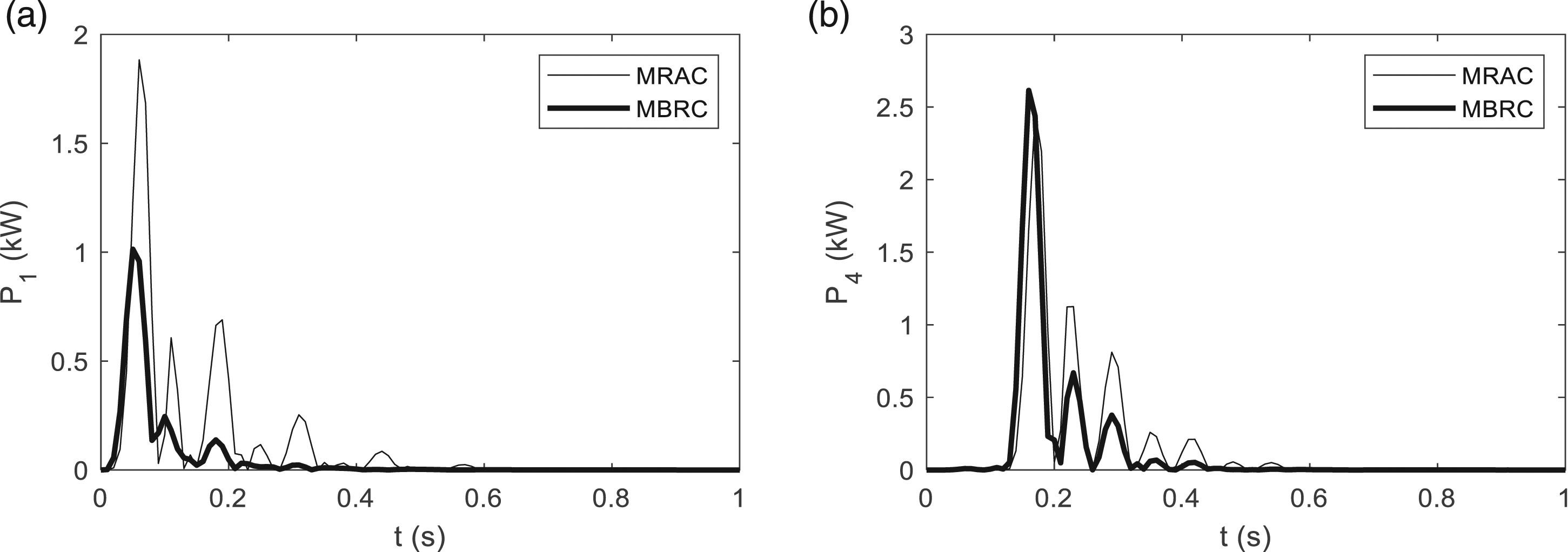
Power consumption is of great importance in vehicles whether they are mechanical or electrical. So as to design an eco-friendly cost effective controller, power consumption with respect to time comes into focus and should be taken into consideration, as well (Figure 13). Given the fact that a vehicle auxiliary system can consume 3-5 kW of engine power (Yagiz et al., 2008), these findings appear to be well supported by reasonable power consumption of a real vehicle.
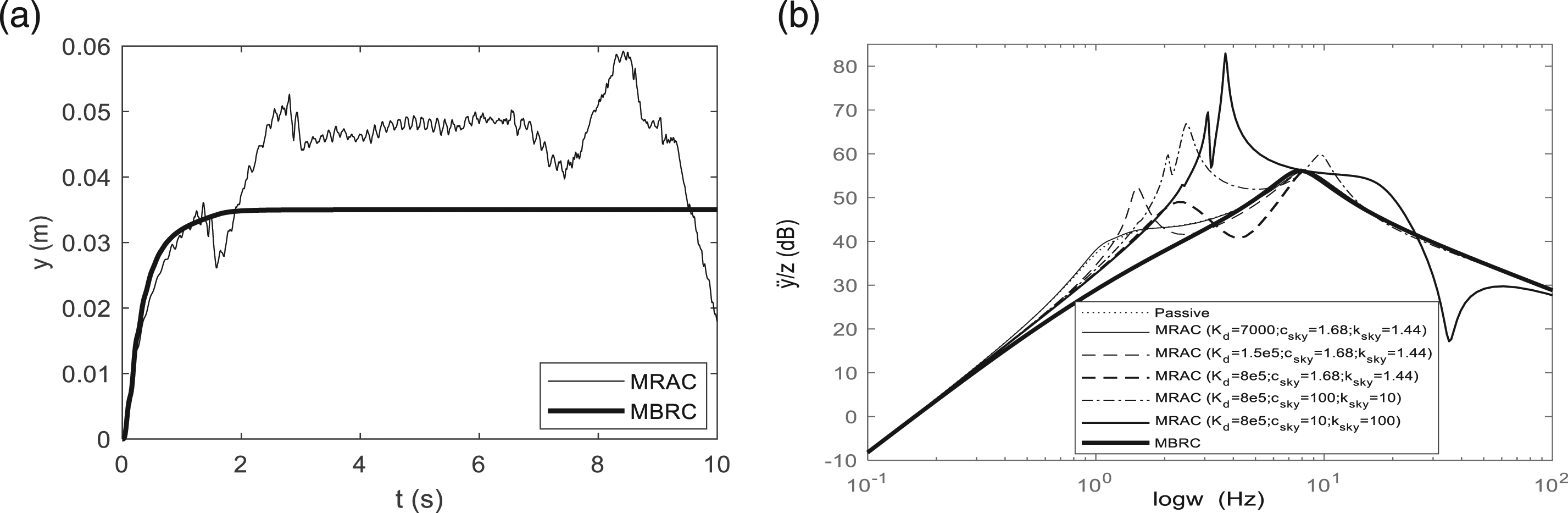
So as to demonstrate the performance of MBRC towards all kind of disturbances, it is assumed that the front left spring is broken right after the vehicle exposed to road disturbance (Figure 14 (a)). It is clearly observed that MBRC is not being affected by broken spring while MRAC is unsuccessful to maintain control action. Thus, this figure proves that it is not important which type of friction model or disturbance is used. That is, this technique clearly has an advantage on rejecting unknown disturbances. Returning to above-given results, vehicle vibrations can be reduced by MRAC in time domain while the results on frequency domain are not reasonable. So, frequency response of body bounce with different controller gains is illustrated in Figure 14 (b). Surprisingly, undesired resonance frequencies at around 3-5 Hz are occurred which deteriorate the passenger comfort. These resonance frequencies cannot be suppressed by MRAC even with higher Kd values and there is a rising trend in resonance frequencies. On the other hand, the resonance frequency at around 1 Hz is significantly reduced without deterioration at 10 Hz by proposed controller. Furthermore, undesired resonance frequencies at around 3-5 Hz are not observed.
Energy consumption of the actuators.

From the Table 3, one can note that the vehicle consumes 0.36 kJ of energy by MBRC until it reaches the stand still position while the energy consumed is 0.55 kJ by MRAC. The most remarkable result to emerge from the data given in table is that MBRC consumes less energy than MRAC for all independent four suspensions. Consequently, Table 3 and above-given figures show exactly where the aim of this study meets the expectations from a controller. From this point of view, it is said that the ride comfort is enhanced by proposed controller without causing any suspension degeneration problem and weakness in road holding within the reasonable values of power consumption. Moreover, this controller ensures the stability of non-linear vehicle suspension system.
4. Conclusion
This paper has investigated the robust control of a suspension system with friction non-linearity for ride comfort enhancement of a vehicle. A model based robust control law based on Lyapunov Theory has been proposed and applied on a full-car active suspension system. The current study corroborates that ultimate uniform boundedness of the error is achieved. A methodology has been suggested which decomposes the model uncertainties. Initially, uncertainties on the system parameters have been considered as the parameterized uncertainties. Afterwards, unmodelled suspension friction and external disturbances have been distinguished as unparameterized uncertainties. It is crucial to note that this methodology has a clear advantage in controlling of a suspension system with unknown unmodelled friction forces or external disturbances along with the any uncertainty on model parameters. To prove the performance of proposed robust control law, a non-linear dry friction model and a disturbance of broken spring have been used. The results on both time and frequency responses are remarkable with lower controller gains. Besides, findings of the study suggest that other types of friction models can be used, as well. Namely, it is worthy to note that it is not important which friction model is used. In addition to this, the robustness of the proposed control approach has been proven towards parameterized and unparameterized uncertainties. To sum up, the results of this research show that the ride comfort of a vehicle is significantly enhanced without degeneration in suspension working space and without a decrease in road holding. Besides, as the research has suggested that the power consumption values are acceptable for a commercial actuator. Thus, one can easily conclude that the proposed control approach is economically viable for vehicles.
Supplemental Material
Supplemental Material - Robust control of vehicle suspension systems with friction non-linearity for ride comfort enhancement
Supplemental Material for Robust control of vehicle suspension systems with friction non-linearity for ride comfort enhancement by Cengiz Ozbek, Recep Burkan and Nurkan Yagiz in Journal of Vibration and Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental Material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.