
Abstract
Stabilization of the inverted pendulum by fractional-order proportional-derivative (PD) feedback with two delays is investigated. This feedback law is obtained as a combination of PD feedback with two delays and fractional-order PD feedback with a single delay. Different types of stabilizability boundaries and the corresponding geometric and multiplicity conditions are determined using the D-subdivision method. The stabilizable region is depicted in the plane of the delay parameters for given fractional derivative orders. Several special cases and the concept of delay detuning are also discussed. It is shown that the admissible delay can be slightly increased compared to the integer-order PD feedback by introducing a fractional-order feedback term.
Introduction
Time delay in state-feedback systems sets a strong limitation in the stabilization of unstable plants. If the feedback delay is larger than some critical value related to the divergence time constant of the plant, then the system cannot be stabilized (Stepan, 1989). This feature can be demonstrated by the inverted pendulum paradigm (Molnar and Insperger, 2016; Qin et al., 2014; Sieber and Krauskopf, 2005). The inverted pendulum is the simplest model that describes an unstable system in Newtonian (second-order) dynamics. Many complex dynamical systems that have one unstable manifold can be reduced to the model equation of the inverted pendulum. Stabilization of objects around unstable periodic orbits, control of walking robots and one-wheeled vehicles, or human balancing tasks can be mentioned as examples.
Stabilization of an inverted pendulum by proportional-derivative (PD) feedback is possible if and only if the feedback delay τ is smaller than a critical delay given by

The critical delay can be increased by employing other than PD feedback. For instance, if the feedback involves acceleration (PDA feedback), then the critical delay can be increased to
Introducing fractional-order derivative in the feedback loop allows us to exploit the time history starting from some initial time to the current time instant. This can be seen from the most frequently used definitions of fractional derivative: the Riemann–Liouville fractional derivative, the Caputo fractional derivative and the Grünwald–Letnikov fractional derivative. All of these definitions of the fractional derivative resembles a distributed delay term. Implementation of fractional-order feedback is, therefore, computationally demanding. Fractional-order differential equations can be treated similarly to integer-order differential equations, although there are some concepts and techniques that need to be generalized (Podlubny, 1998).
In this paper, we consider the PD
μ
control of an inverted pendulum with different delays in the proportional and the fractional derivative terms. This concept gives a transition between two special cases already investigated in the literature. 1. Detuned PD feedback (the case μ = 1) was investigated in Sieber and Krauskopf (2005). 2. Fractional-order PD feedback without delay detuning (the case τp = τd) was investigated in Balogh and Insperger (2018).
Here, we combine these two concepts and derive the admissible feedback delay for the detuned fractional-order PD feedback.
The different delays originate in the different sensory systems used for the perception of position and velocity. In engineering applications, the operation of position and velocity sensors is different; therefore, they typically result in different delays in the feedback loop. In human postural balance, as a biological application, position and velocity information are obtained by the static and dynamic receptors of the inner ear, which induces that the corresponding delays are different. When the velocity is calculated as a discrete difference of the position, then signal processing introduces an extra delay.
The characteristic function of the system under investigation reads

This definition of the critical delay is of interest because one can also think of (2) as a control system with a single control-loop latency τ and some additional delays (or delay detunings) δp and δd. This concept leads to

The paper is organized as follows. After some preliminary thoughts, some special cases are discussed in Special Cases. In Stabilizability Analysis, stabilizability diagrams are constructed and their change is analyzed with respect to the order of the fractional derivative in order to find the critical delay.
Preliminaries
Stability of linear time-invariant fractional-order time delay systems can be investigated using their characteristic function: the system is BIBO (bounded-input bounded-output) stable if and only if the roots of the characteristic function have negative real part on the first Riemann sheet (Bonnet and Partington, 2002; Matignon, 1996; Monje et al., 2010). Consequently, the D-subdivision method can be applied to (2) as follows.
Substitution of s = 0 and s = ±iω, ω > 0 into D(s) = 0 gives the D-curves

The D-curves bound the parameter regions in the plane (kp, kd) where the number of unstable characteristic roots is constant. Stable regions (zero unstable characteristic roots) can be determined by the argument principle (Merrikh-Bayat, 2013; Wang et al., 2011). When the delays increase, then the stable regions typically shrink and disappear. There is a critical delay
Special cases
Special cases can be defined either by setting the fractional order μ to integer or by setting τp = τd.
Integer-order controllers: μ = 0, μ = 1 and μ = 2
Special cases μ = 0 and μ = 1 were already analyzed in Sieber and Krauskopf (2005). If μ = 0 and τp ≠ τd then one gets the proportional minus delay (PMD) controller of Sieber and Krauskopf (2005). In this case, a non-semisimple triple-zero eigenvalue occurs at the limit of stabilizability, which corresponds to the parameter combinations

Equation (6) gives a hyperbolic relation between the delays (see Figure 1(a)). Note that τd is a strictly decreasing function of τp, therefore min{τp, τd} is maximal if τp approaches τd. The limit case τp → τd would give the critical delay The stabilizability boundaries and multiplicity conditions in the plane (τp, τd) if μ = 0 (a), μ = 1 (b), and μ = 2 (c) with a0 = 2.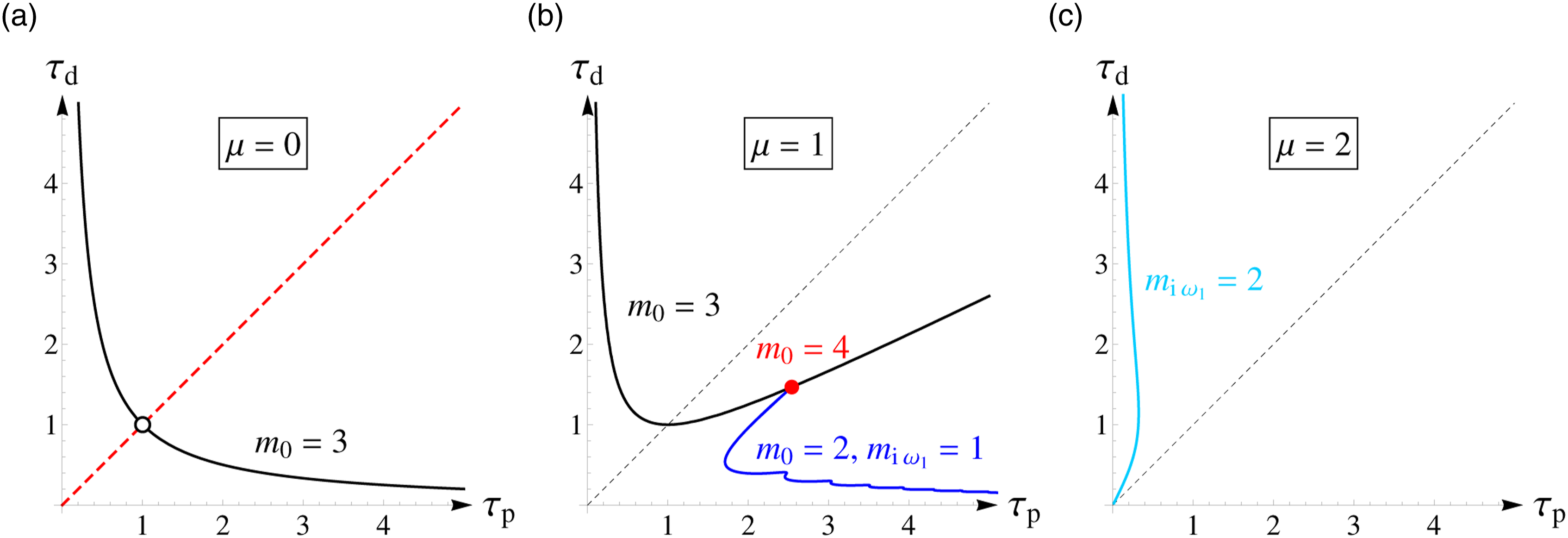
The case μ = 1 corresponds to the detuned PD (dPD) controller in Sieber and Krauskopf (2005), where it was shown that the critical delay can be extended to
The case μ = 2 corresponds to a detuned proportional-acceleration (dPA) feedback, that is, a detuned PDA feedback with kd = 0. If τp = τd, then the system cannot be stabilized similarly to the case μ = 0. If delay detuning is allowed, then the system can be stabilized and the critical delay is
A special combination of the cases μ = 1 and μ = 2 gives the detuned PDA feedback, which was investigated in Balogh et al. (2022b) in terms of stabilizability boundaries. The idea of integer-order delayed PD and derivative-acceleration controllers was also addressed in Wang and Xu (2017) in the case of the damped harmonic oscillator.
PD μ controller with a single delay
The special case τp = τd = τ was already investigated in Balogh and Insperger (2018). The stabilizable region was derived in the plane of the dimensionless parameters a = a0τ2 and μ (see Figure 2(a)). Using the D-subdivision technique, one can observe four types of loss of stabilizability. These geometric conditions can directly be translated into the multiplicity conditions shown in Figure 2(b). The stabilizability boundary consists of three segments: Stabilizable region of (2) if τp = τd = τ with a = a0τ2 (a). The stabilizability boundaries and multiplicity conditions in the plane (μ, τ) if a0 = 2 (b).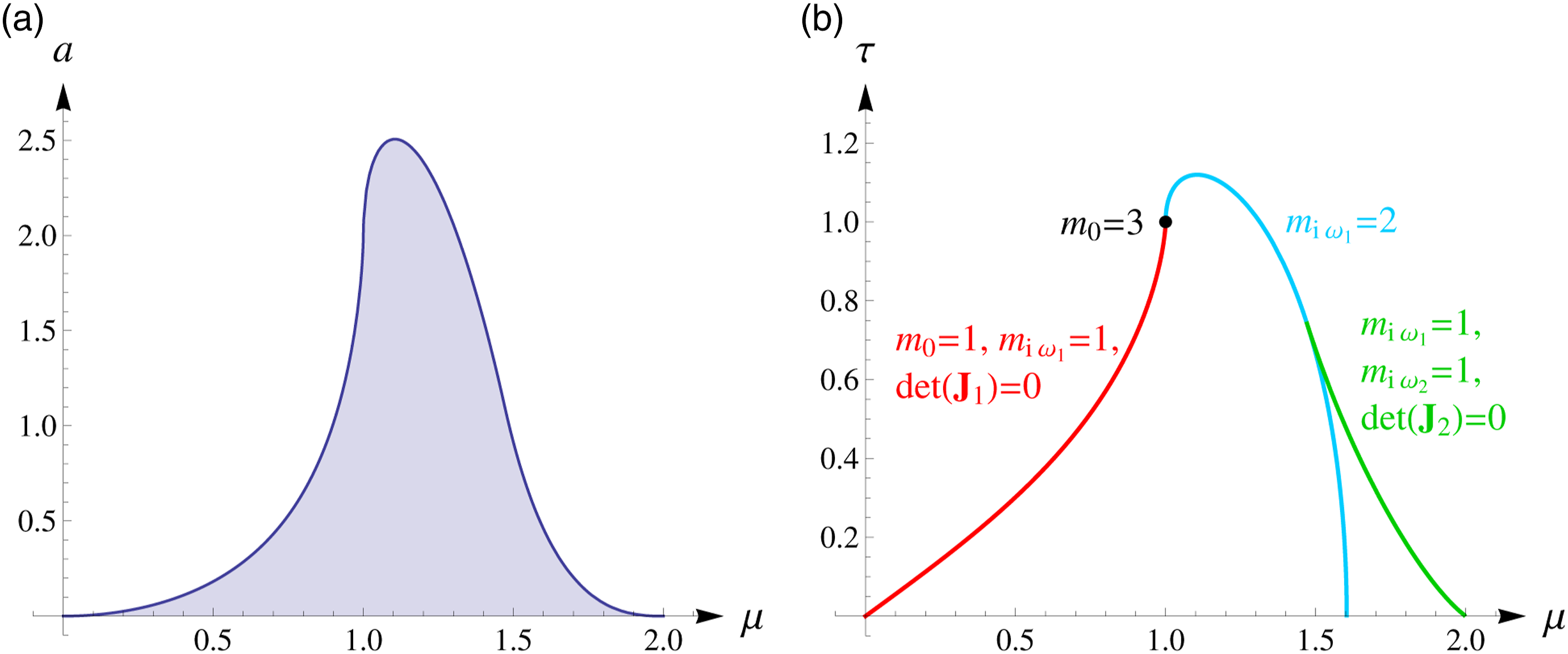
1. There is a single zero root (s = 0) and a single pair of purely imaginary roots (s = ± iω1, ω1 > 0) with an additional condition

where

with respect to kp, kd, and ω1 (for more details, see Appendix 1). Thus, equation (7) represents the singularity of the Jacobian matrix 2. There is a double pair of purely imaginary roots shown by blue line in Figure 2(b). The corresponding geometric interpretation is a loop-cusp transition of the stable region similarly to the case shown in Figure 3(c). 3. There are two pairs of purely imaginary roots (s = ±iω1, ω1 > 0 and s = ±iω2, ω2 > 0) with an additional condition

where

with respect to kp, kd, ω1, and ω2. In this case, the stable region disappears as the complex root boundary crosses itself tangentially similarly to the case shown in Figure 3(f). This stabilizability boundary is shown by green line in Figure 2(b). Stability charts: Types of loss of stabilizability and the corresponding multiplicity conditions. Here, 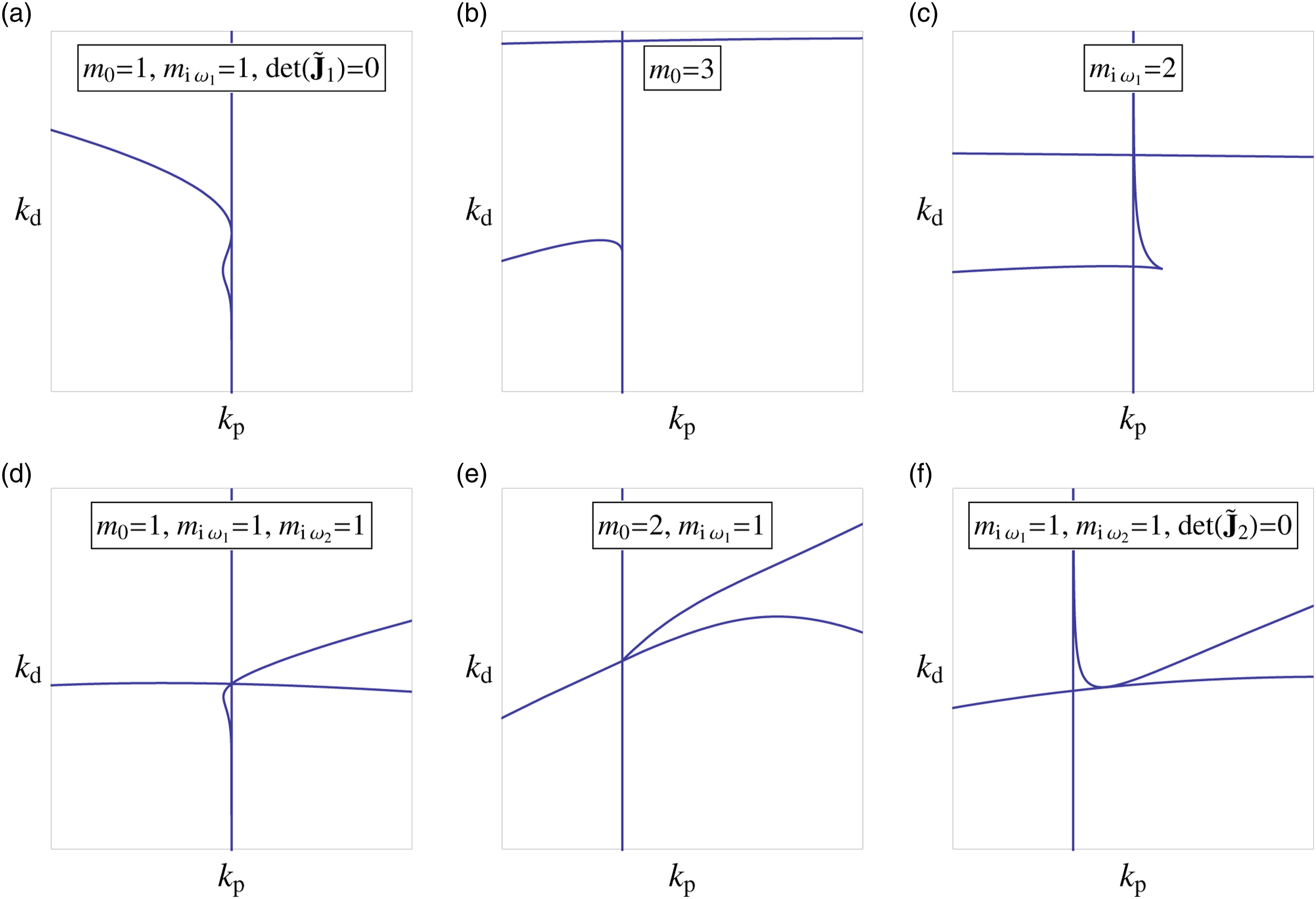
At the connection point of segments 1 and 2, there is a triple zero root (s = 0) similarly to the case shown in Figure 3(b).
Stabilizability analysis
The main goal is to determine the stabilizable region in the plane (τp, τd) for the general case (0 < μ < 2). Then, the critical delay for (3) can also be obtained by analyzing the changes of the stabilizability boundaries for varying μ.
Constructing stabilizability diagrams in the plane (τp, τd)
Stabilizability can be investigated by observing the change of the stable parameter region with respect to the change of some other parameters. Figure 4 shows an example of how the stable region in the parameter plane (kp, kd) (bounded by the loop of (5)) changes as parameter τp is increased if μ = 1.2 and τd = 0.58 with a0 = 2. The stable region shrinks to a single point if τp ≈ 1.19. At this critical point, the characteristic function has a distinct pair of purely imaginary roots since the complex root boundary (5) touches itself. The tangency at the critical point imposes another condition, namely, Stability charts of (2) if μ = 1.2 and τd = 0.58 with a0 = 2. The critical point corresponds to 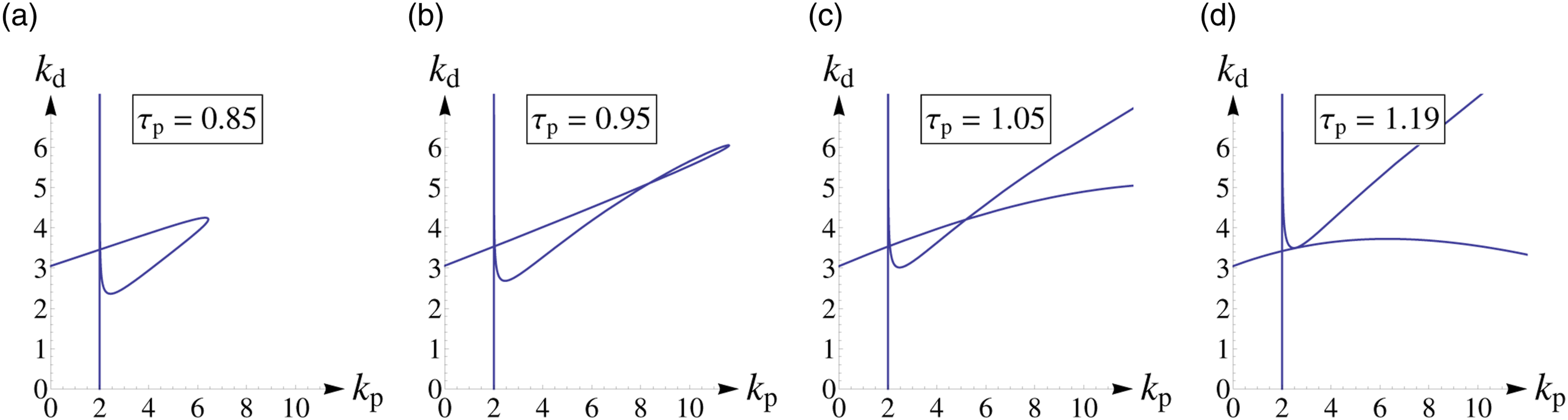
The multiplicity conditions in PD
μ
Controller With a Single Delay give a more uniform description of the stabilizability boundaries compared to that of Balogh and Insperger (2018). Furthermore, the techniques in PD
μ
Controller With a Single Delay can also be applied if τp ≠ τd. That is, the stabilizability boundaries can be obtained following the steps below. 1. Geometric conditions at the limit of stabilizability should be detected by D-subdivision as shown in Figure 4. Different parameter regions exhibit different types of loss of stabilizability. Here, six different geometric conditions are distinguished which are represented in Figure 3. 2. Geometric conditions should be translated into multiplicity conditions. The multiplicity conditions corresponding to the critical points are also shown in Figure 3. Note that multiplicity condition 3. Each multiplicity condition gives a nonlinear system of M + 3 equations for variables kp, kd, τp, τd, μ, and ω
i
, i = 1, …, M for some M that could also be 0. If μ and τp or τd are fixed, then this system of equations could be solved for the rest of the variables. These nonlinear systems of equations are linear in kp and kd, therefore reduced systems of equations can be obtained by solving two of the equations for kp and kd. Then, only the remaining equations have to be solved numerically. 4. A solution can be represented by a point in the plane (τp, τd) for a fixed μ. In order to find an initial solution, a critical point and the corresponding parameter values (obtained by D-subdivision) can be used as an initial guess. If the reduced system of equations consists of less than three equations, then contour plots of these equations also give insight into the possible initial solutions. Then, such a (initial) point can be extended to a curve (i.e., to a stabilizability boundary) by using numerical continuation. Pseudo-arclength continuation allows us to follow the solution curve even if the tangent is vertical (or horizontal).
An example for the stabilizability boundaries is shown in Figure 5 for μ = 1.2. Two types of loss of stabilizability may show up: a pair of purely imaginary roots with multiplicity two indicated by blue line; and two pairs of distinct purely imaginary roots with and additional condition The stabilizability boundaries and multiplicity conditions in the plane (τp, τd) if μ = 1.2 with a0 = 2.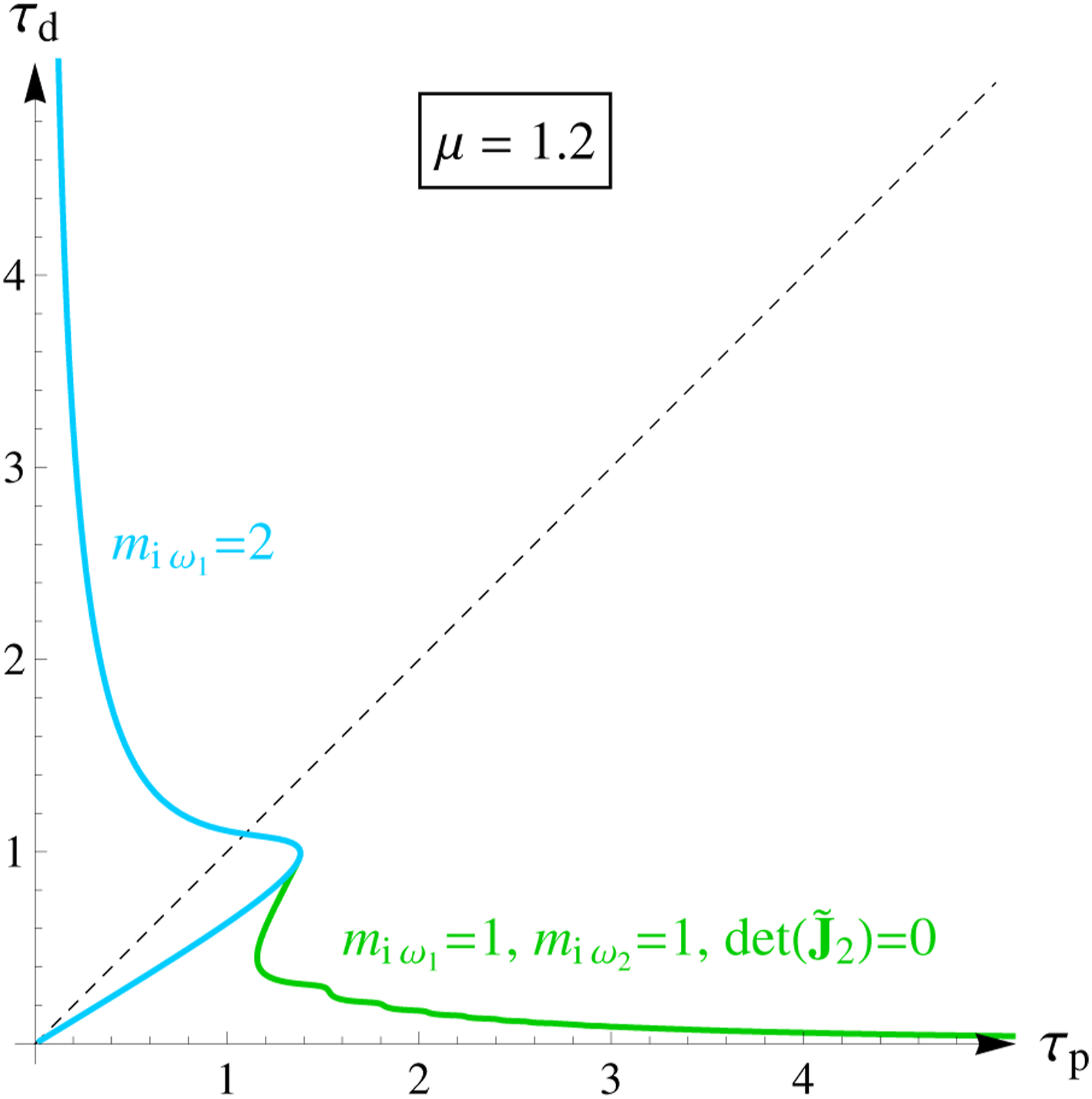
Changes in stabilizability for varying μ
Figure 6 shows the stabilizability boundaries in the plane (τp, τd) for different values of μ in the neighborhood of μ = 1. The stabilizable region can be extended compared to the detuned PD controller (μ = 1) by choosing an appropriate value of the fractional order μ. The line The stabilizability boundaries in the plane (τp, τd) if μ ≤ 1 (a) and μ ≥ 1 (b) with a0 = 2. Stabilizable regions are to the left of the curves.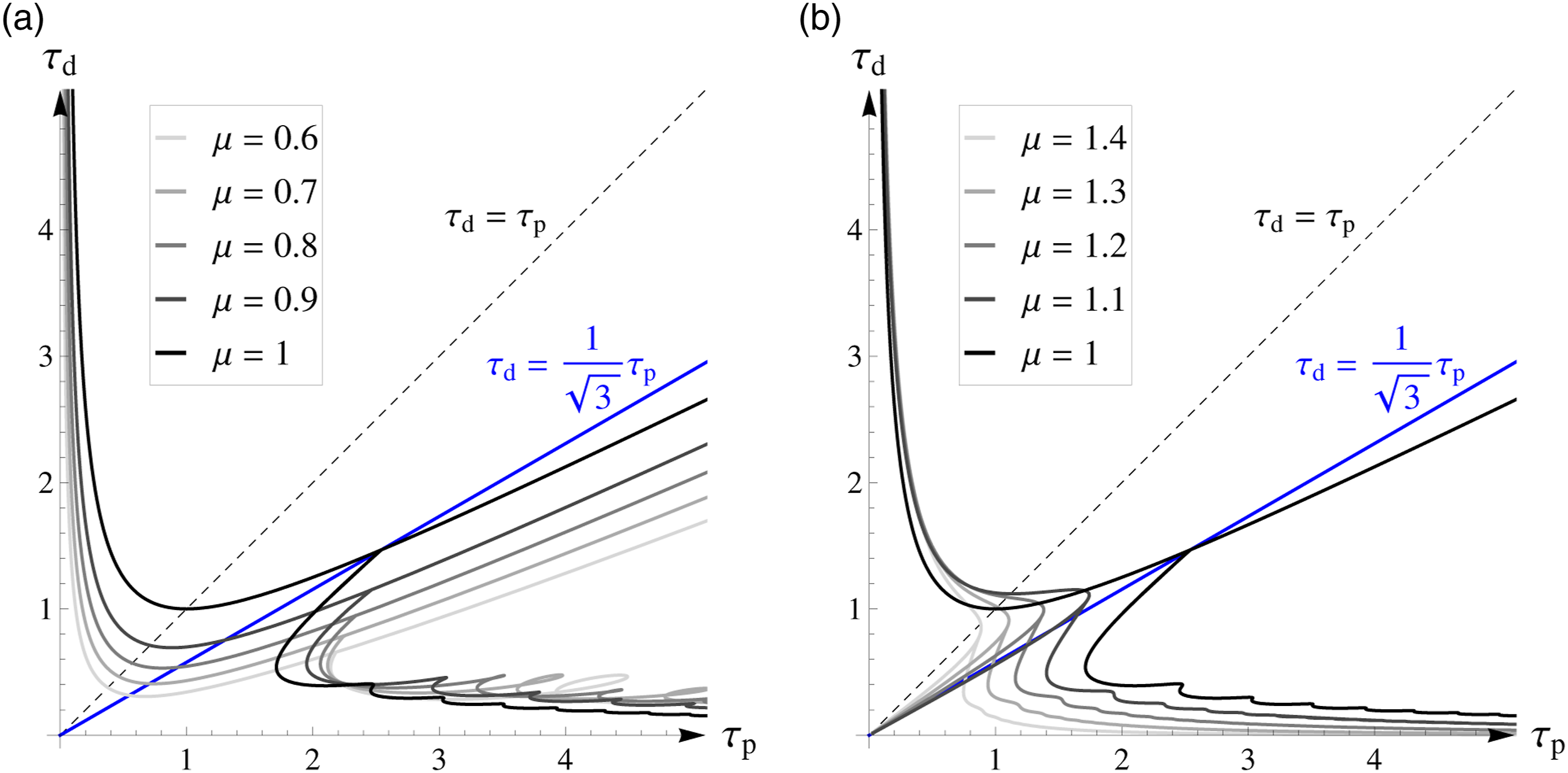
Critical delay in the sense of detuned fractional-order PD feedback
We can draw more conclusions from the stabilizability diagrams. For every μ, we can find a point in the stabilizable region where the minimum of τp and τd is maximal. The path of this point is shown by red line in Figure 7(a) if μ ≤ 1. In Figure 7(b), the critical delay (related to the detuned fractional-order PD feedback (3)) is shown as a function of μ in the left neighborhood of μ = 1. The path of the critical point in the plane (τp, τd) if μ ≤ 1 (a) and the critical delay for 0.99 ≤ μ ≤ 1 (b) with a0 = 2.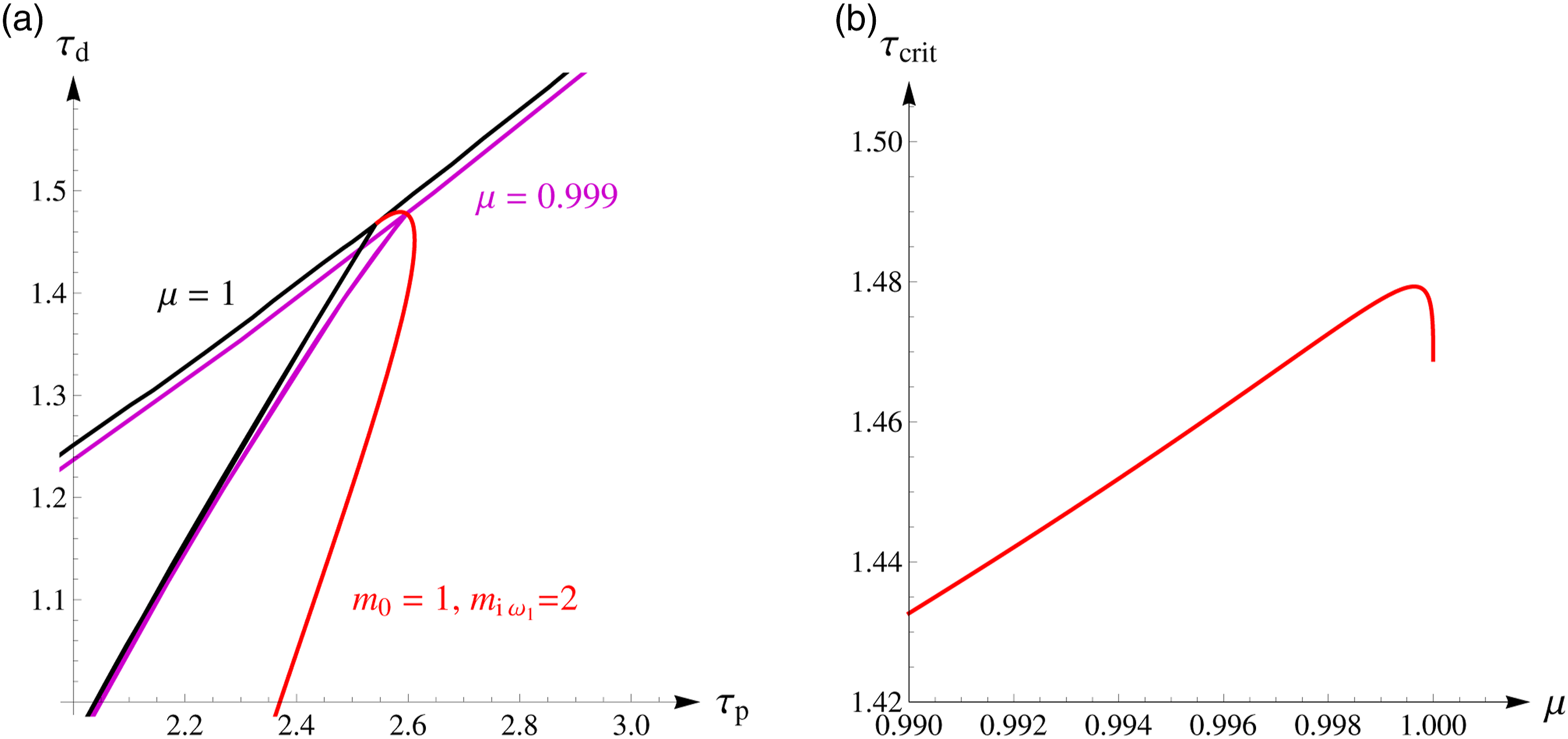
The largest admissible delay is obtained for μ = 0.999,637. In this case, the critical delay is
Conclusions
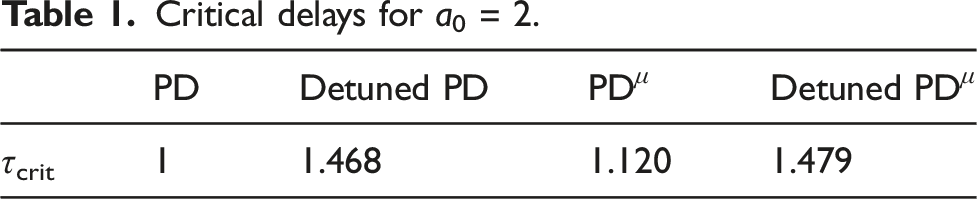
Critical delays for a0 = 2.


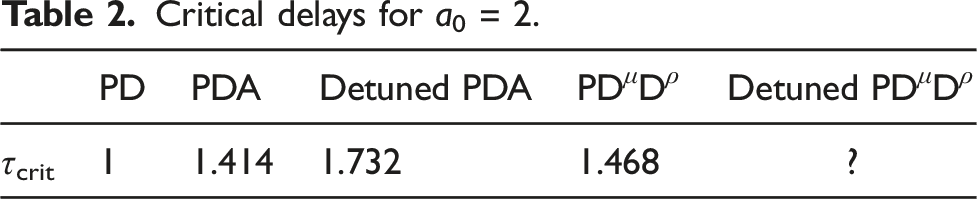
Critical delays for a0 = 2.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research reported in this paper has been supported by Project no. TKP-9-8/PALY-2021 provided by the Ministry of Culture and Innovation of Hungary from the National Research, Development and Innovation Fund, financed under the TKP2021-EGA funding scheme, by the Nemzeti Kutatási Fejlesztési és Innovációs Hivatal (Grant nos. NKFI-K138621 and BME-NVA-02) and by the ÚNKP-22-3-II-BME-98 New National Excellence Program of the Ministry for Culture and Innovation from the source of the Nemzeti Kutatási Fejlesztési és Innovációs Hivatal.