
Abstract
Spacecraft (satellite) formation has several applications in space exploration. Synchronization controllers are essential in satellite formation systems. This article proposes a novel robust adaptive synchronization control (RASC) technique for two identical three-dimensional chaotic satellite systems attitude synchronization with an unknown system parameter, unknown bounded model uncertainties, unknown external disturbances, and nonlinear terms. This controller achieves smooth error vector convergence to zero. The closed-loop has a robust performance as the controller avoids plant nonlinear terms cancellation. This controller has two parts. (i) A nonlinear controller for keeping the closed-loop stable; it flourishes robust and faster error vector convergence to zero with reduced fluctuations. (ii) An adaptive nonlinear controller that compensates exogenous disturbances and model uncertainties using online estimations of model uncertainties and bounds. The Lyapunov stability theory assures the closed-loop's global asymptotic robust stability. Computer simulation results-based analysis verifies the theoretical findings. The article includes a comparative study and discusses the control effort saturation effects.
Keywords
1. Introduction
Chaotic dynamical systems show sensitivity to parameter variations and initial conditions; such systems display irregular, unpredictable, and complex behaviour (Miillin, 1991). Many dynamical systems in natural and basic sciences exhibit chaos (Abarbanel et al., 1993). Satellite systems have potential applications in astronomical sciences, including remote sensing, earth observation, space colonization, navigation, and communications systems (Zhou et al., 2018). The angular velocity of the satellite's dynamical system is sensitive to time-varying external disturbances (Piper and Kwatny, 1992). Aerodynamic drag torque, gravitation rotation, mass variations, and solar radiations cause uncertainty in the satellite dynamics model (Xiao et al., 2010). For specific choices of the perturbation torques, the satellite dynamics during the orbital motion exhibit both strange attractors and limit cycles and experience chaos (Dracopoulos and Jone, 1994, Leipnik and Newton, 1981, Meehan and Asokanthan, 2012). These torques are chosen sufficiently large to induce chaotic motion (Kemih et al., 2009). Space formation (a group of smaller satellites) accomplishes space and earth observation missions, which a single satellite cannot complete. It reduces the launching cost and improves the mission accomplishment robustness and efficiency (Sarcheshmeha et al., 2017). Spacecraft formation requires the synchronization of several small satellites (Du and Li, 2014). A follower satellite converges to the targeted prescribed orbit of a leader satellite; ultimately, multiple satellites attain a desired position and posture in a designated orbit. These spacecraft formations may have many master satellites (Liu et al., 2019).
Fast and precise chaotic satellite systems synchronization requirements in numerous applications motivate researchers to design synchronization control algorithms. Chaos in satellite kinematics revealed fundamental issues in satellite attitude synchronization (Liu et al., 2004). The three-dimensional chaotic satellite (TDCS) systems attitude synchronization through feedback controller schemes is an active research topic; a brief literature review of this research follows. Leipnik and Newton (1981) identified chaos in the three-dimensional satellite dynamics and designed a linear feedback controller; the closed-loop system has two distinct strange attractors contingent on specific feedback gains and the ultimate attractor orbit on the initial local orbit. Dracopoulos and Jones (1994) designed an adaptive neuro-genetic controller for TDCS system attitude control exhibiting strange attractors. The article (Kuang and Tan, 2000) applies the Melnikov method for analyzing quasi-rigid energy-dissipating satellites subject to the time-periodic non-Hamiltonian perturbation torques and gyrostat satellites under small perturbation torques. The paper (Liu et al., 2004) shows that satellite attitude motion has Smale horseshoe chaos based on the Melnikov method and designs a nonlinear controller for penalizing the attitude's perturbation effect. The article (Sadaoui et al., 2011) develops a systematic procedure for designing a continuous-time predictive controller; it determines necessary and sufficient conditions to ensure closed-loop exponential stability in synchronizing two identical TDCS systems. The authors (Liu et al., 2018) developed an adaptive sliding mode control for synchronizing the angular velocity of the TDCS system exposed to external disturbances. Ref. Khan and Kumar, 2018a analyses the TDCS system's chaotic behaviour using equilibrium points, dissipativity, Poincare maps, Kaplan–Yorke dimension, Lyapunov exponents, and bifurcation diagrams methods and proposes a nonlinear feedback control strategy for attitude synchronization of two identical time-delay TDCS systems. The article (Khan and Kumar, 2018b) designs a Lyapunov-based sliding mode controller synchronizing two identical TDCS systems. Khan and Kumar (2019a) realize the adaptive synchronization of two identical TDCS systems with uncertain parameters. Using the linear matrix inequality technique and Takagi-Sugeno fuzzy modelling, Khan and Kumar (2019b) designed a predictive controller for synchronizing two identical uncertain TDCS systems. The paper (Le et al., 2020) develops an interval type-2 fuzzy neural network controller that studies synchronizing two identical TDCS systems with uncertain parameters and unknown external disturbances. Based on the Lyapunov theory and Barbalat's Lemma, the paper (Pal et al., 2022) proposes an adaptive backstepping sliding mode controller that realizes two identical TDCS systems' synchronization. Al Saade et al. (2022) propose a fixed-time adaptive control technique and investigate the attitude synchronization and anti-synchronization of two identical TDCS systems with unknown parameters, moments of inertia, and disturbance torques. In the presence of external disturbances and model uncertainties, the article (Xiao et al., 2022a) proposes a fixed-time disturbance observer-based robust control strategy; it accomplishes satellite attitude control in a prescribed time. The paper (Xiao et al., 2022b) designs a Lyapunov stability theory-based robust controller for establishing attitude coordination control for flexible spacecraft formations in the presence of measurement errors, external disturbances, and model uncertainties. It successively develops less conservative attitude coordination performance bounds.
The following subsection discusses the challenges and motivations.
1.1. Challenges and motivations
(1) Most feedback control strategies (Al Saade et al., 2022, Liu et al., 2018, Khan and Kumar, 2018a, 2018b, 2019a, 2019b, Le et al., 2020, Pal et al., 2022) for synchronizing two identical TDCS systems follow the nonlinear terms cancellation approach. These approaches need exact state variables and parameters measurement; such measurements are technologically challenging due to the noisy and uncertain environments. Consequently, the closed loops (Al Saade et al., 2022, Liu et al., 2018, Khan and Kumar, 2018a, 2018b, 2019a, 2019b; Le et al., 2020, Pal et al., 2022) are contaminated by residual nonlinear terms. Therefore, these controllers assimilate erroneous control efforts, possibly causing instability in the closed-loop system. The residual terms disturb the closed-loop performance, including transient, steady-state, and long-time delays (Ma and Bigdeli, 2017). (2) Minimizing synchronization process energy consumption is challenging. Reducing variable oscillations improves energy efficiency. Accurate attitude synchronization of coupled TDCS systems keeps them in the orbit of interest. Precise coupled TDCS systems attitude synchronization maintains their orbit. Large fluctuations in synchronization errors may cause actuators' failure and complete system disaster in the worst-case scenario. (3) The proposed controllers (Al Saade et al., 2022, Liu et al., 2018, Khan and Kumar, 2018a, 2018b, 2019a, 2019b, Le et al., 2020; Pal et al., 2022) furnish a smaller synchronization error convergence gradient. (4) Several internal and external disturbances induce state variables oscillations in the TDCS system during orbital motion, resulting in the escape of the satellite from the desired orbit. The model uncertainties and external disturbances have different natures. Model uncertainties result from modelling errors, unmeasured variables, and variations in system parameters due to manufacturing tolerances, wear and tear, or changes in environmental conditions. These uncertainties are state variables functions. The sources of external disturbances are torques, including solar radiation pressure, deviations in weight, aerodynamic torque, gravity gradient torques, moving parts and mechanisms, misalignment of thrusters, out-gassing, and reaction wheels (Meehan and Asokanthan, 2012, Kemih et al., 2009), among others, causing plant parameters variations. Further, the temperature gradient is a function of the orbit altitude, which remains there. This variation severely affects the functioning of the electronic systems, which also causes variations in the system parameters.
State-of-the-art TDCS systems synchronization controllers review.
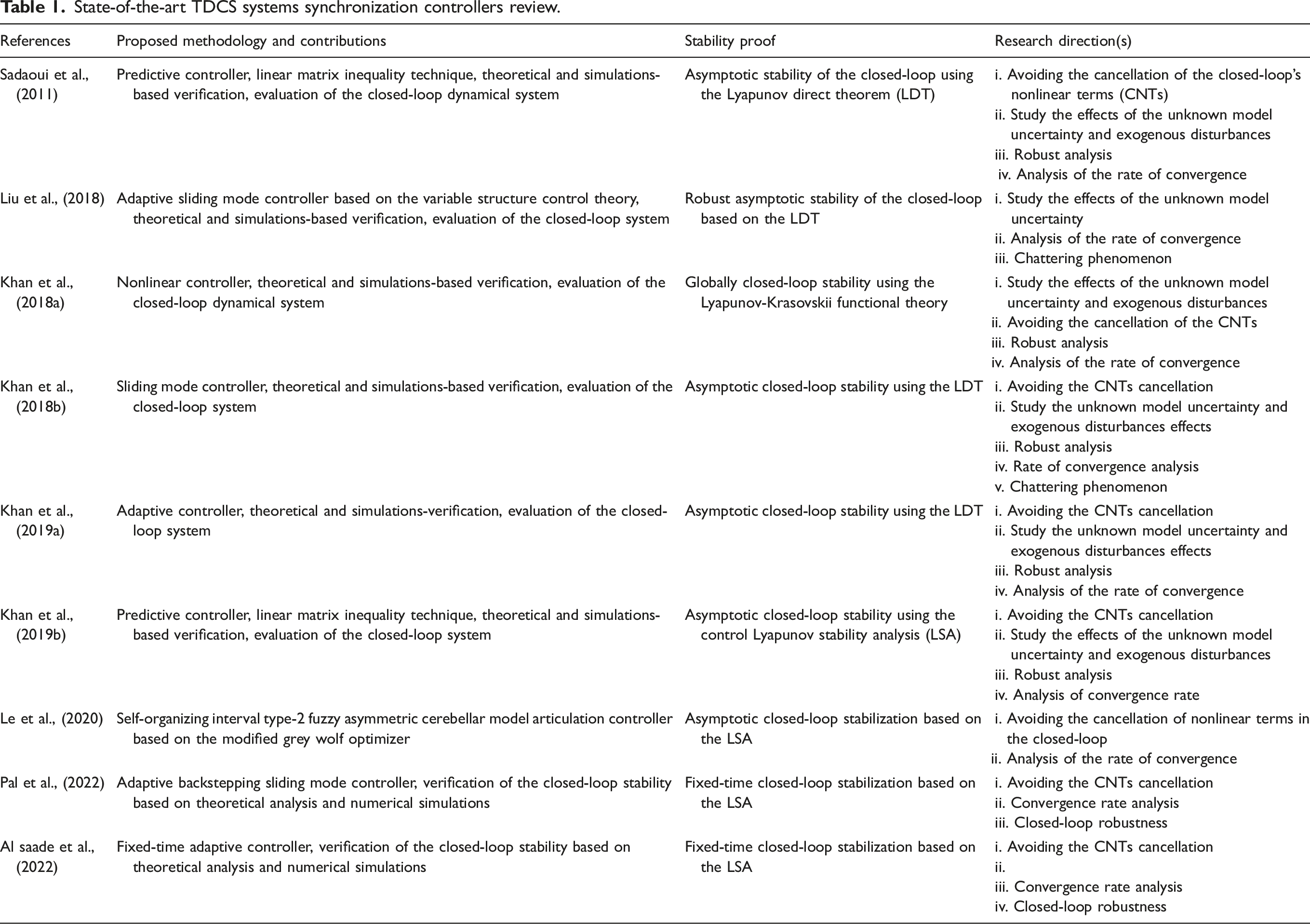
The above challenges motivate designing two identical TDCS systems synchronizing controllers for the closed-loop structure having the following attributes. (1) Avoid the TDCS system nonlinear terms cancellation. (2) Faster error vector convergence rates. (3) Robust against unknown time-varying model uncertainties and exogenous disturbances.
1.2. Research objectives
This article proposes a controller that achieves the following objectives. These objectives address all the challenges in subsection 1.1. (1) The proposed control strategy should decouple the control input from plant nonlinear terms, resulting in a stable closed-loop, robust against time-varying uncertainties, external disturbances, and the TDCS system's parameter variations. (2) The controller should synthesize a chatter-free control effort to construct an energy-efficient closed-loop. Such state-feedback control signals smooth the actuator operation, reducing failure and malfunction probability. (3) It should develop a faster-reduced oscillation stable closed-loop.
1.3. Contributions
The proposed novel adaptive controller synchronizes attitudes of two identical TDCS systems with an unknown parameter and devises a closed-loop stability analysis procedure. The proposed RASC strategy achieves all objectives in subsection 1.2. The article provides a detailed stability analysis using the Lyapunov stability theory (Khalil, 2022), ensuring robust asymptotic closed-loop stability. Computer simulation results are discussed to verify the theoretical findings. The paper compares the closed-loop's performance with other state-of-the-art synchronization control methodologies reported in (Khan and Kumar, 2018b, 2019a, Haris et al., 2020).
The paper is organized as follows. Section 2 illustrates the TDCS system attitude dynamics. Section 3 formulates the attitude synchronization problem between two identical TDCS systems with an unknown parameter. Section 4 designs a novel feedback controller for synchronizing master-slave TDCS systems and proves the robust closed-loop stability. Section 5 provides numerical simulation results analysis and comparative studies. It also discusses the control effort saturation sequels. Section 6 concludes the article.
2. Attitude dynamics of the chaotic satellite system
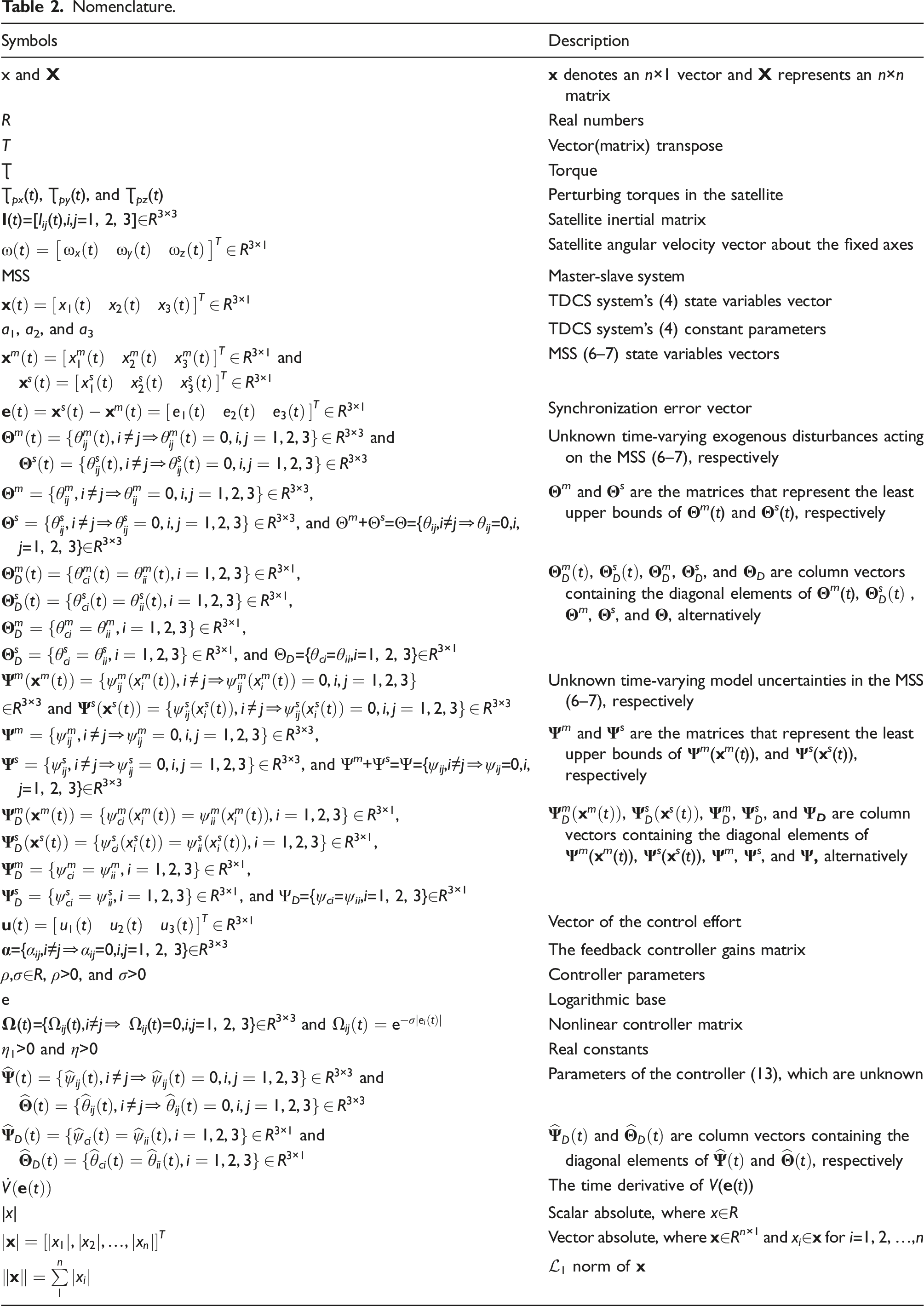
2.1. Notations and symbols
Nomenclature.
2.2. Dynamics of the chaotic satellite system
Numerous satellite kinematic models are reported in the literature for spacecraft dynamics (Leipnik and Newton, 1981, Dracopoulos and Jones, 1994, Kuang and Tan, 2000, Liu et al., 2004; Sadaoui et al., 2011). The dynamical system Euler equations in (1) represent satellite attitude (Dracopoulos and Jones, 1994, Kuang and Tan, 2000, Liu et al., 2004, Sadaoui et al., 2011).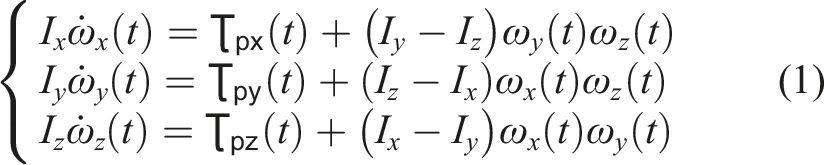
The perturbing torques are given in (2) (Leipnik and Newton, 1981, Dracopoulos and Jones, 1994, Kuang and Tan, 2000, Liu et al., 2004).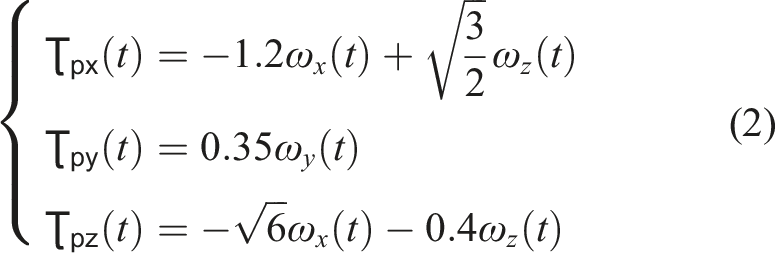
The perturbation torques may disrupt the spacecraft's attitude. Some sources of these torques are solar radiation pressure, earth's gravity field, magnetic field interactions, atmospheric drag, un-modelled forces or moments, friction, elastic forces (Piper and Kwatny, 1992, Xiao et al., 2010, Kemih et al., 2009, Liu et al., 2018), etc. Substituting equation (2) into equation (1) gives equation (3). Equation (3) represents the satellite system attitude dynamics (Leipnik and Newton, 1981, Dracopoulos and Jones, 1994, Liu et al., 2004) exhibiting chaotic behaviour for I
x
>I
y
>I
z
(Leipnik and Newton, 1981, Xiao et al., 2010). This paper considers I
x
=3, I
y
=2, and I
z
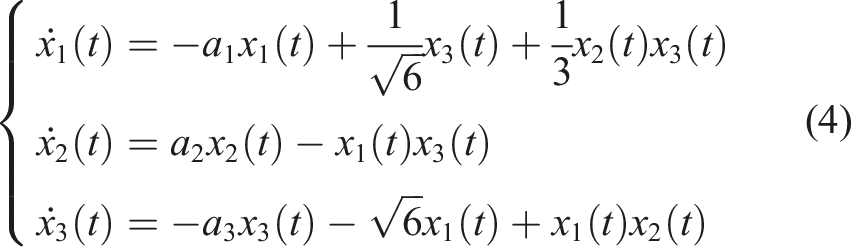
=1 for the benchmark problem (Khan and Kumar, 2018a, 2018b, 2019a, 2019b). Let ω
x
(t)=x1(t), ω
y
(t)=x2(t), ω
z
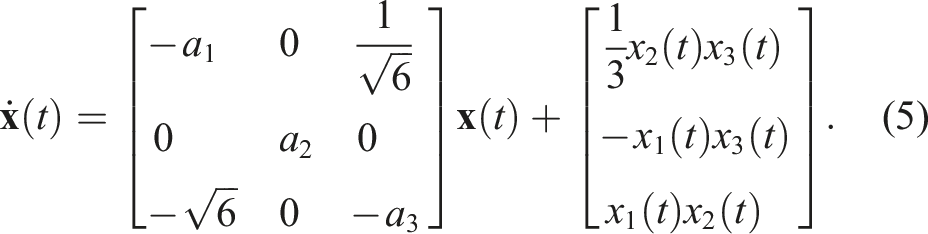
(t)=x3(t), Equation (5) presents the mathematical model of the TDCS system (4) in the matrix form. The computer simulation results are produced using a1=0.4, a2=0.175, and a3=0.4 (Khan and Kumar, 2018a, 2018b, 2019a, 2019b) with initial conditions The following section presents the problem statement for attitude synchronization of two identical TDCS systems described in (5).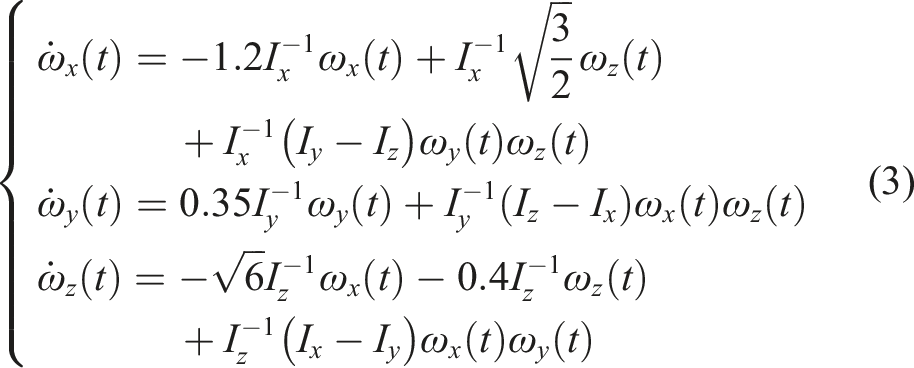
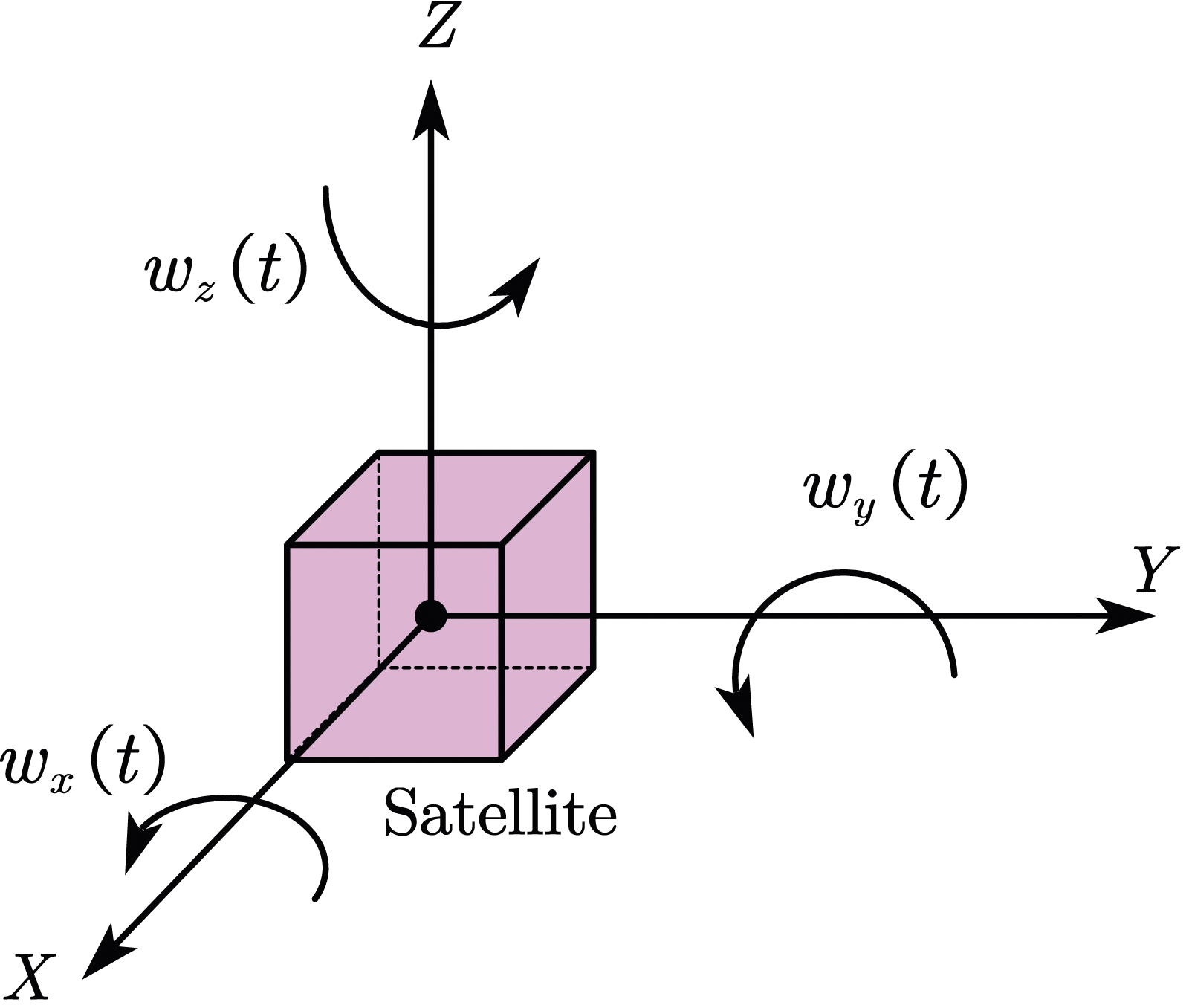
Reference frame.
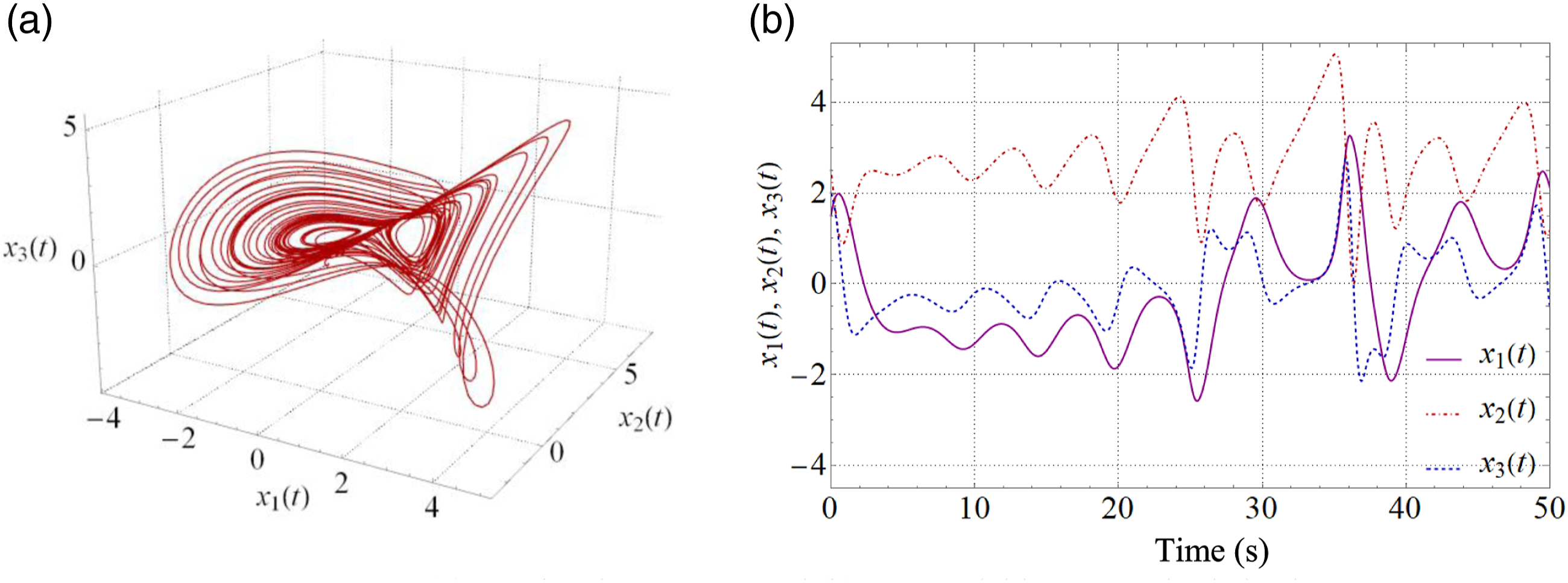
(a) 3D chaotic attractor and (b) state variable trajectories behaviour.
3. Problem formulation
3.1. Attitude synchronization of two identical TDCS systems with an unknown parameter
Consider master and slave TDCS systems state variable vectors are
Master TDCS system: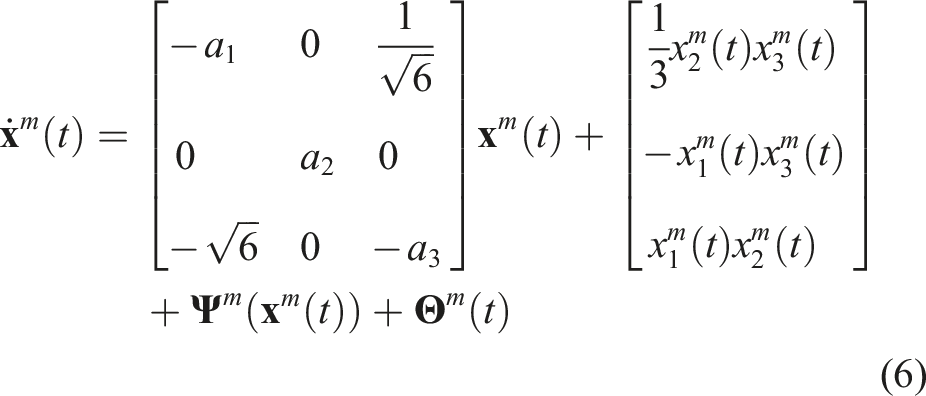
Slave TDCS system: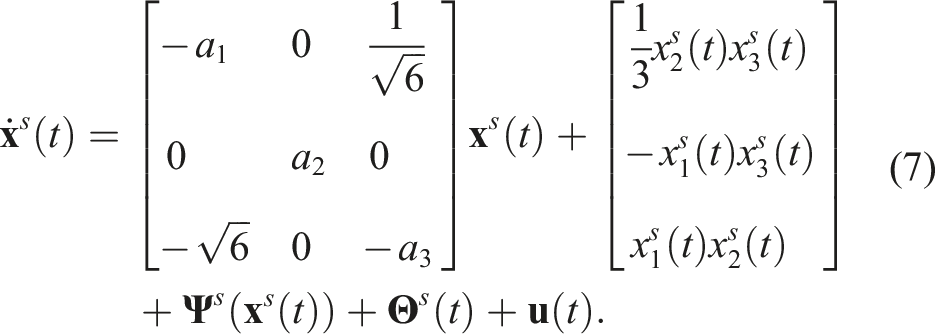
Equation (8) defines the error dynamics of the MSS arrangement in (6–7).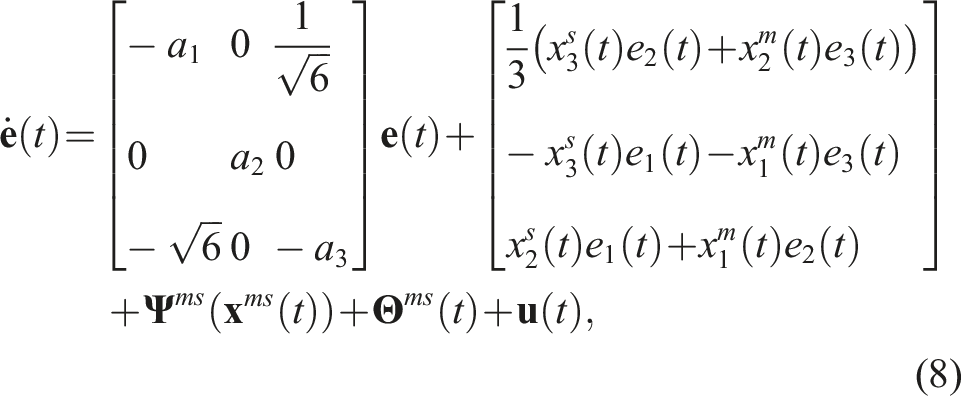
Internal and external disturbances influence the satellite's attitude uniform motion by producing model uncertainties, ultimately causing the satellite to escape from the desired orbit (Du and Li, 2014, Piper and Kwatny, 1992, Meehan and Asokanthan, 2012). Among others, the disturbance sources are measurement and dynamic modelling errors (Zhang et al., 2021, Carpentras and Quayle, 2022), various propagation errors (Mezic and Runolfsson, 2008, Januszewski, 2017), and control system errors (Avanzini et al., 2019). These uncertainties are time-varying due to variations in the spacecraft's aerodynamic drag, mass, and spatial structure (Xiao et al., 2010), which generates oscillations in the system state variables, resulting in the divergence of the system's state error signal. Further, exogenous disturbances are mainly the un-modelled parts of the perturbation torques. The random noise sources are due to the electronic measurement and actuation systems, including the solar system and associated power electronics.
Let us assume the unknown model uncertainties {Ψ( and Hence, equations (10b) and (11b) conclude that:




The suitability of Assumption 1 is described in the appendix.
3.2. Problems in the controllers and a possible solution
The synchronization control strategies (Liu et al., 2018, Khan and Kumar, 2018b, 2019a) use discontinuous signum (sgn) functions for compensating uncertainties and increasing the convergence rates; this approach leads to abrupt changes in control signals, causing chattering and producing oscillations. Articles (Aghababa and Akbari, 2012, Fang et al., 2019, Haris et al., 2020) (among others) compute control signals using continuous hyperbolic tangent functions instead of signum functions to avoid chattering, but the proposed control laws generate oscillations due to hefty controller gains.
3.2.1. Challenge 1
The literature survey substantiates that various control strategies synchronize MSS in (6–7), but the state error vector oscillates and has large overshoots, and they provide slow convergence rates.
3.3.2. Objective 1
The aim is to construct a feedback control algorithm synthesizing a chattering-free control signal vector
The following section proposes a novel robust adaptive controller that addresses the challenges described above and develops a controller design procedure based on the Lyapunov stability analysis theory.
4. A solution to the problem
4.1. Controller design and parameters update laws
Equation (13) designs an RASC structure, which computes a control effort 
where
Applying the control effort 

4.2. Robust stability analysis of the closed-loop
Let us construct the Lyapunov candidate function as follows:
The parameters adaptation laws (14) ensure that
The simulation results in Figures 10(a)–(b) and 11(a)–(b) verify Remarks 4 and 5. Now, Substituting 

4.3. Analysis of
,
, and
stability
4.3.1 Analysis of
Let us choose α
ii
>0, which assures that
4.3.1.1. Analysis of
and
To show that 
Using update law (14) into (23) gives:

Similarly,
Therefore,
Large values of α
ii
and ρ increase the synchronization speed as depicted in Figure 13(a)–(c).
5. Numerical simulations
Initial conditions, TDCS system parameters, controller parameters, exogenous disturbances, and model uncertainties.
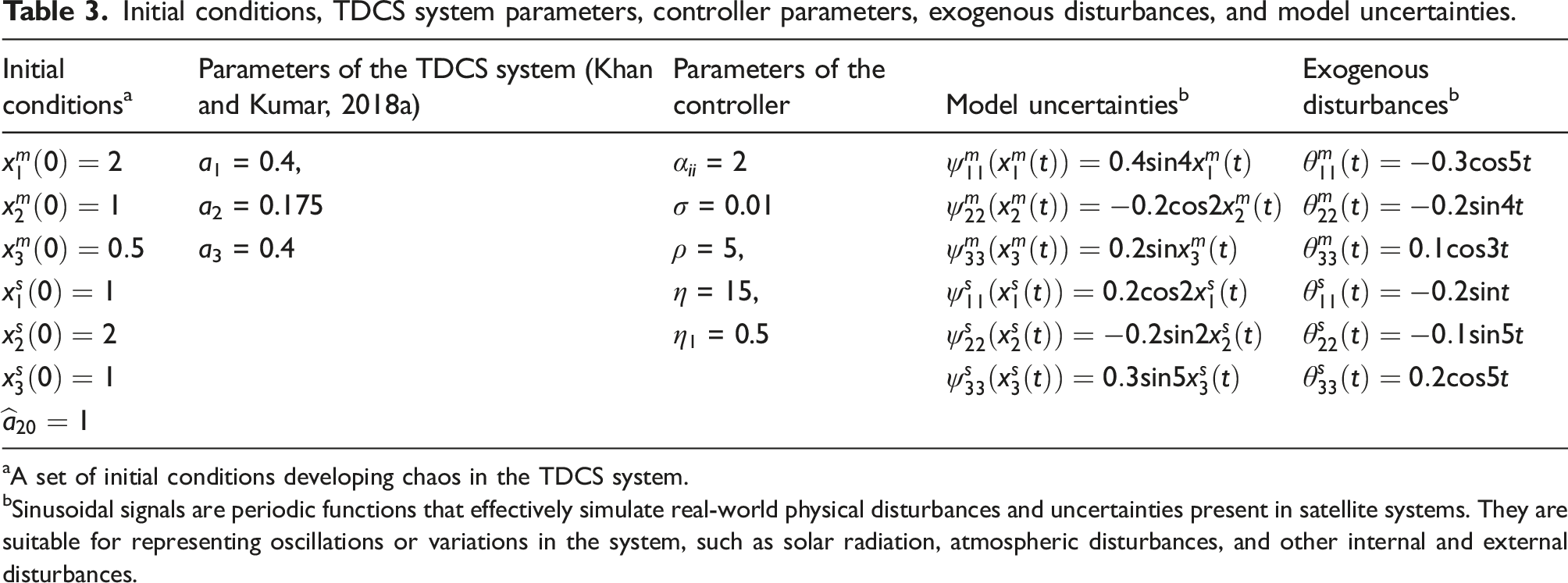
aA set of initial conditions developing chaos in the TDCS system.
bSinusoidal signals are periodic functions that effectively simulate real-world physical disturbances and uncertainties present in satellite systems. They are suitable for representing oscillations or variations in the system, such as solar radiation, atmospheric disturbances, and other internal and external disturbances.
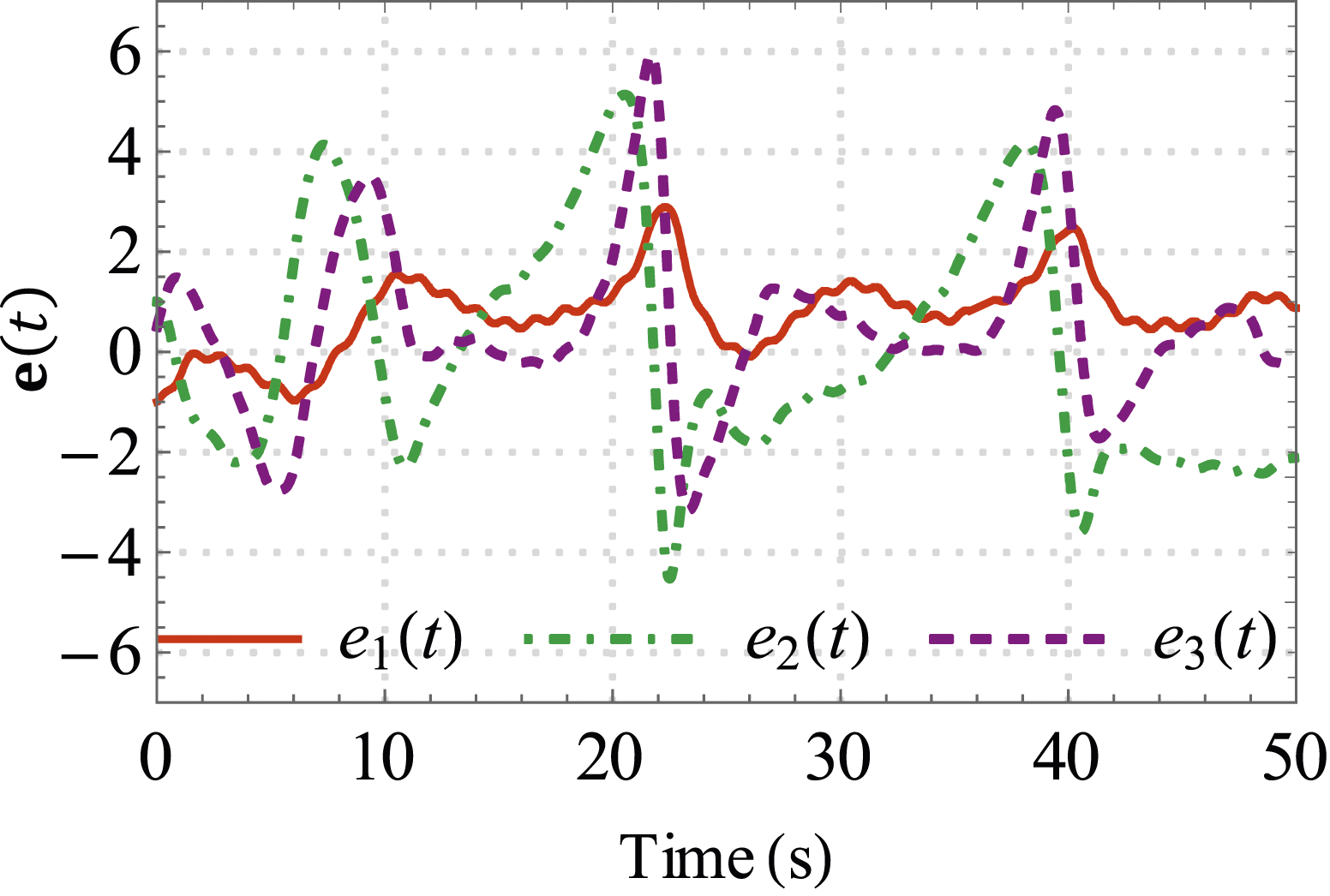
The state variables in Figure 3(a)–(c) and error trajectories in Figure 4 demonstrate that the MSS (6–7) do not synchronize without any control effort. The MSS (6–7) state variables behaviour (a) Synchronization error vector behaviour without any control effort.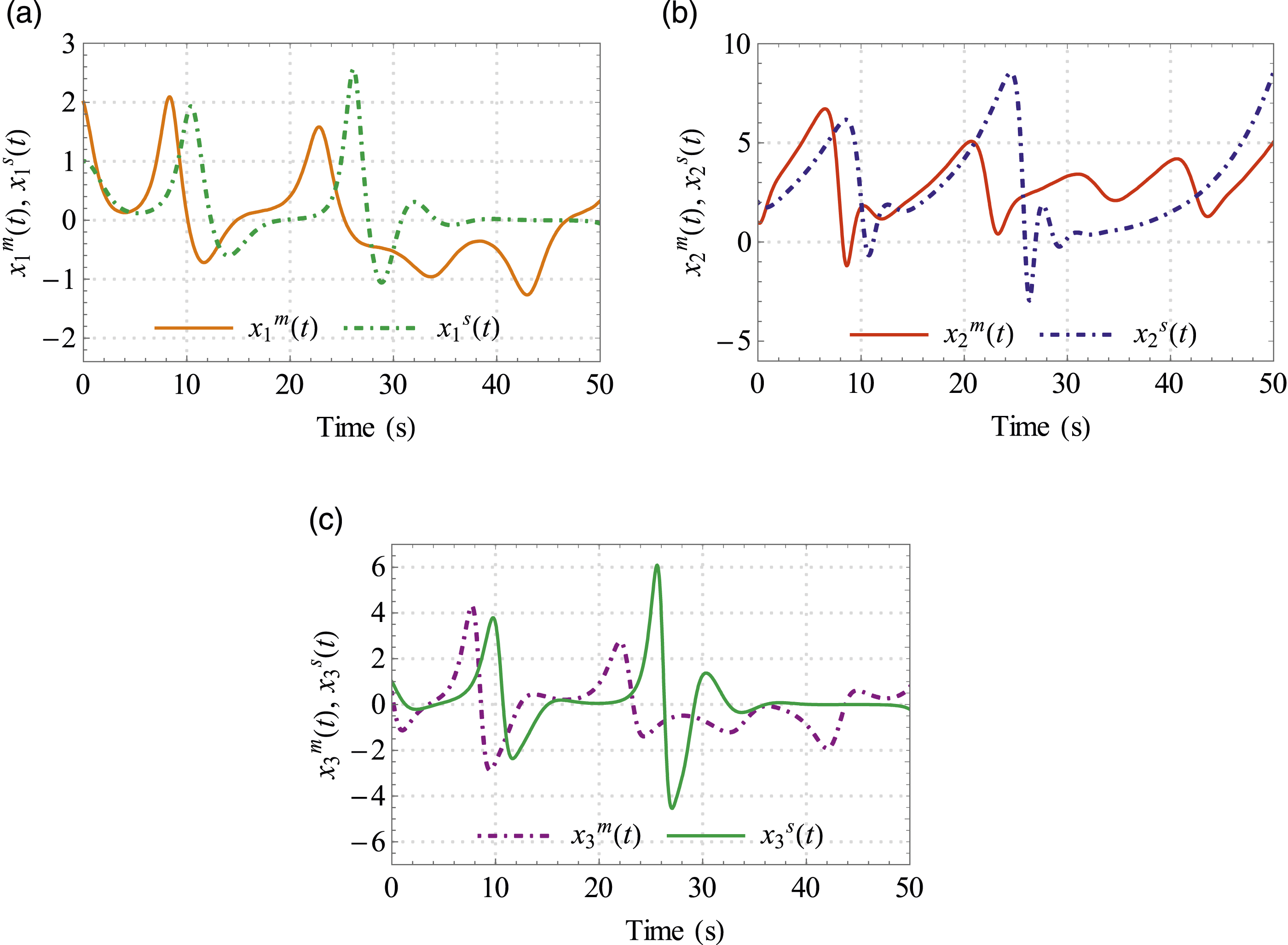
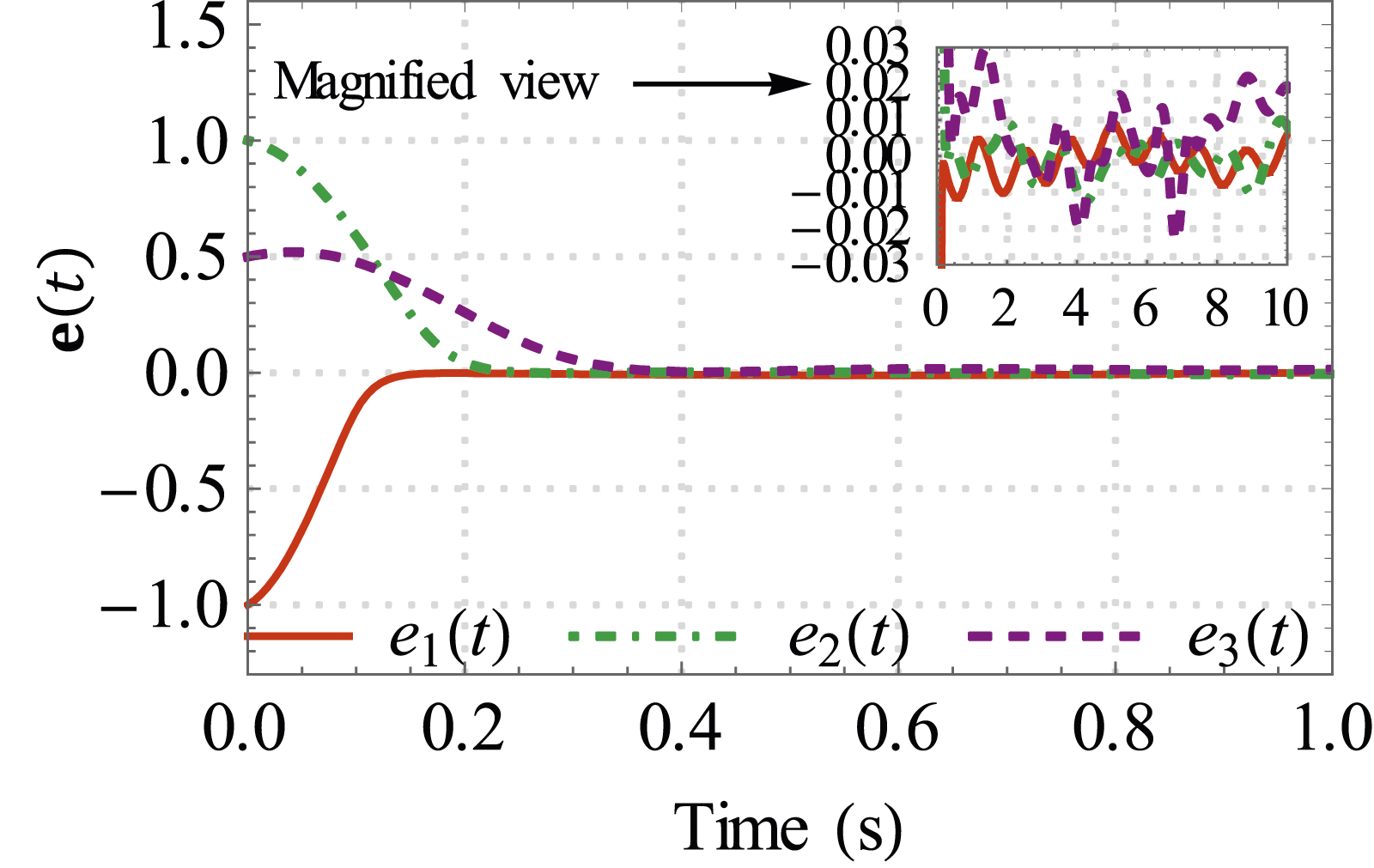
Figures 5(a)–(c) and 6 depict that the MSS (6–7) state variables show similar behaviour, and error trajectories (8) converge to the vicinity of zero under the control effort computed by (13). The MSS (6–7) state variable synchronization behaviour using a control effort (13). (a) Synchronization error vector using a control effort (13).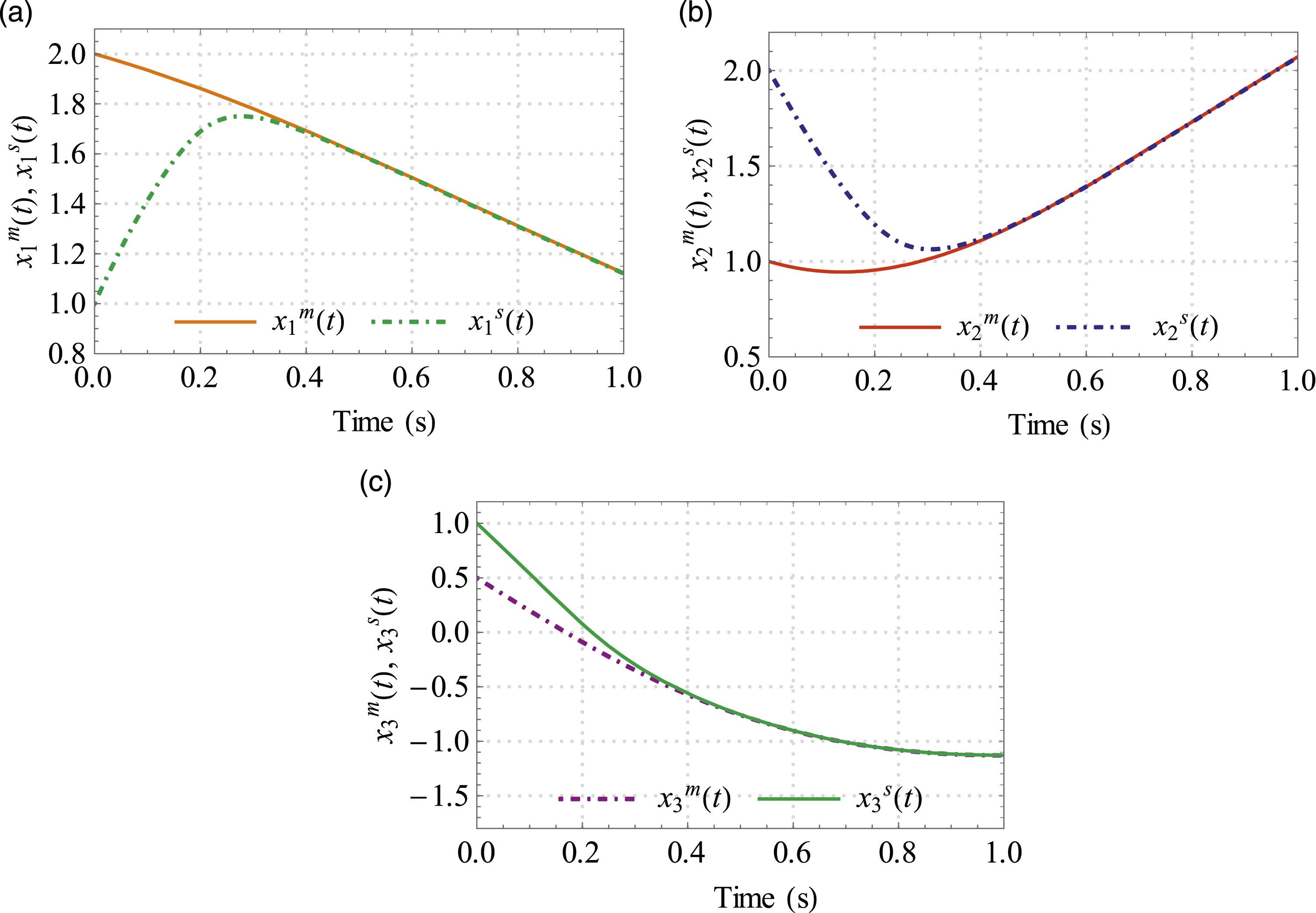
Figures 7, 8(a)–(b), and 9(a)–(b) illustrate the estimated parameters Estimated parameters Estimated parameters 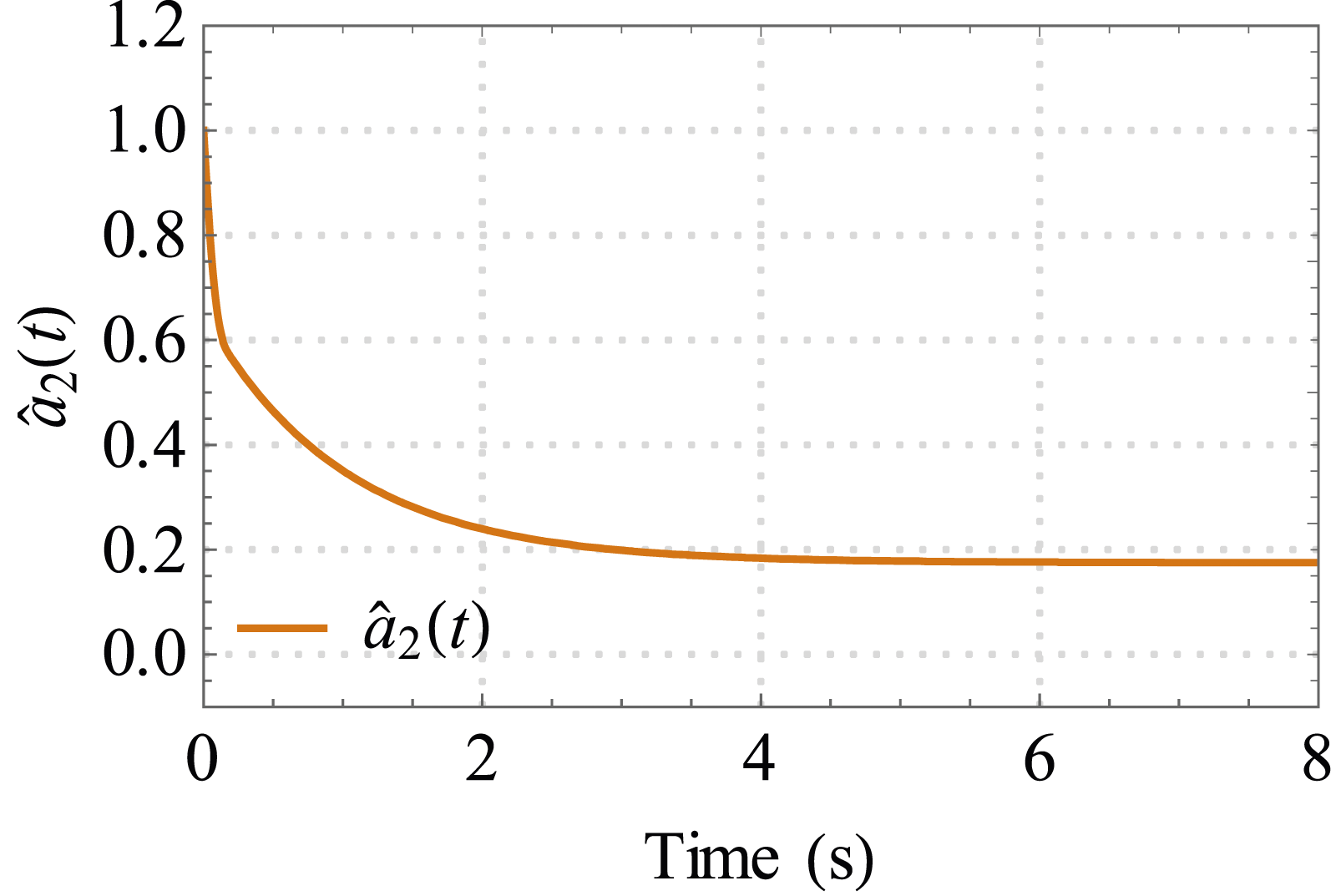
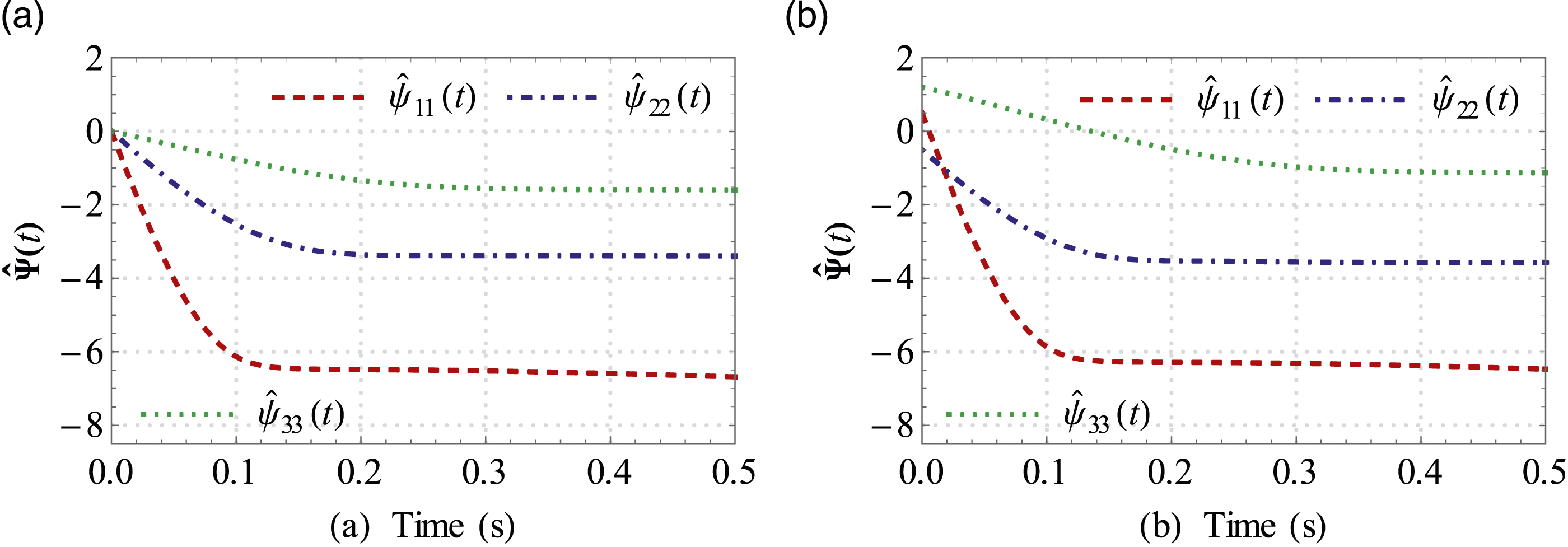
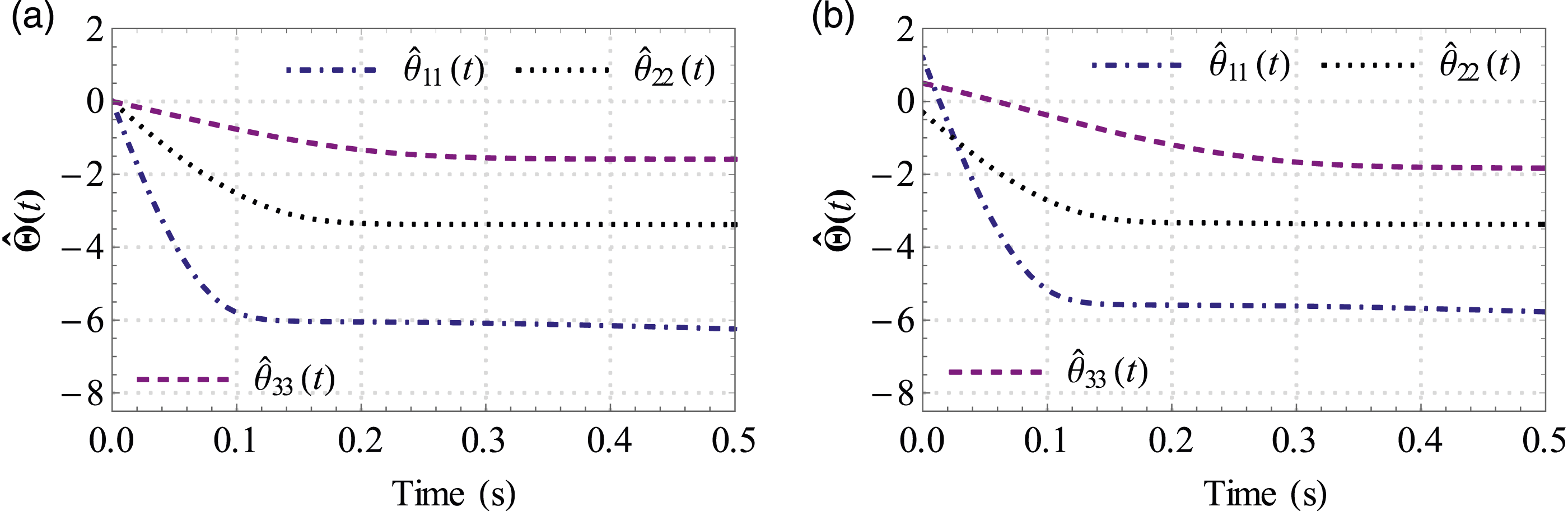
Figure 10 demonstrates the synchronization error vector behaviour to the vicinity of zero. It shows reduced oscillation of the error vector convergence. Error vector convergence.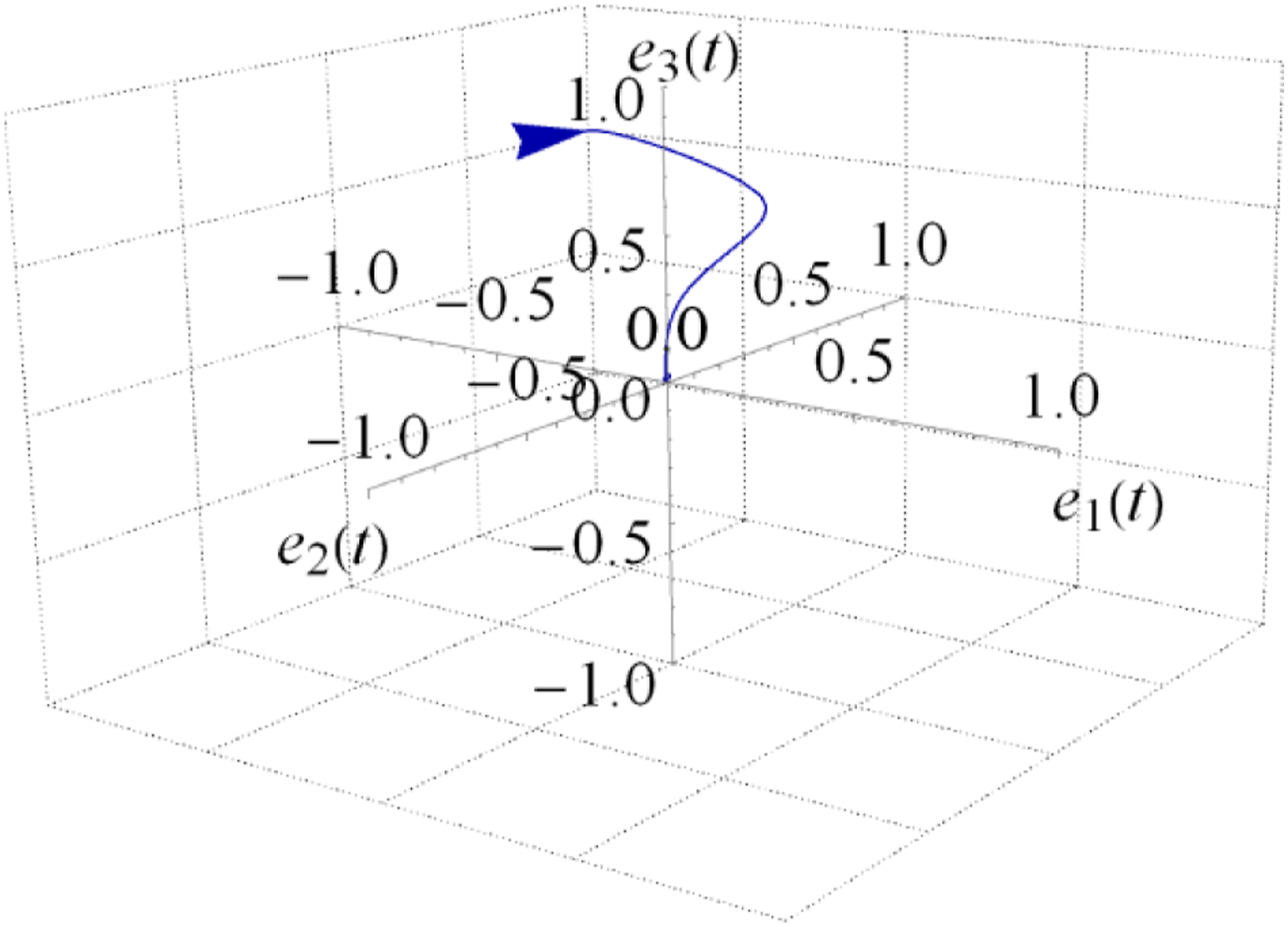
The error vector convergence behaviour for different controller parameters ρ and α
ii
are shown in Figure 11(a)–(c). These figures demonstrate that the error convergence speed increases and the steady-state oscillations reduce when the values of ρ are large. Faster error convergence speed is also observed by increasing the values of α
ii
(i=1, 2, 3), but it slightly raises the steady-state oscillations. Table 4 summarizes the data for the simulation results shown in Figure 11(a)–(c). Error vector behaviour with a control effort (13) when (a) ρ=10 and α
ii
=2, (b) ρ=15 and α
ii
=2, and (c) ρ=10,α
ii
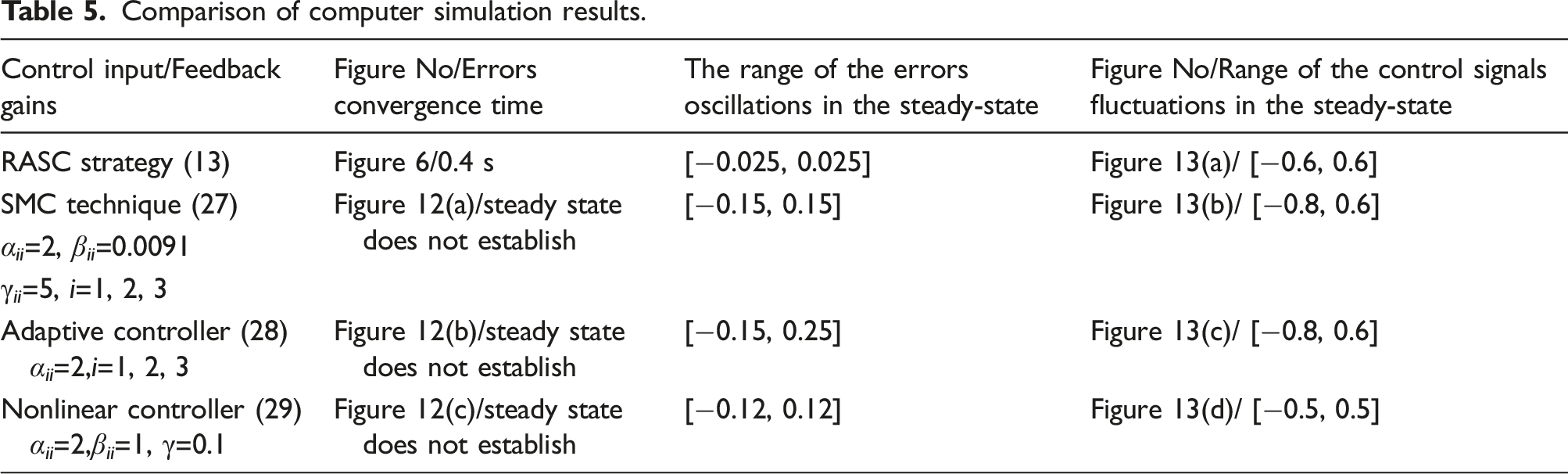
=10. Comparison of the computer simulation results.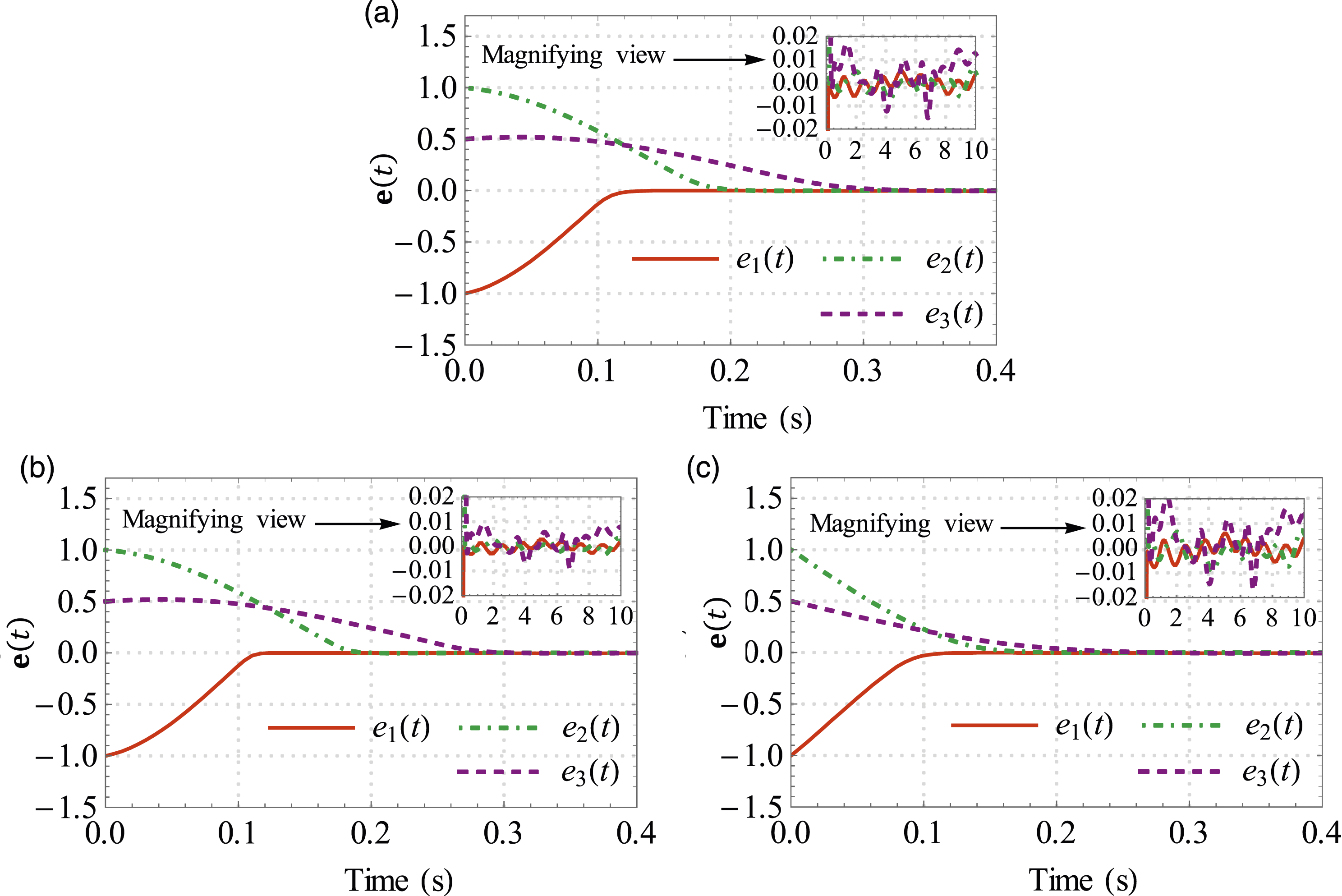

Based on numerical simulation results, the following subsection performs a comparative study with the other control techniques (Khan and Kumar, 2018b, 2019a, Haris et al., 2020) to evaluate the proposed RASC approach (13) effectiveness.
5.1. Comparative study
The state-feedback control input vector (i) SMC strategy (Khan and Kumar, 2018b):
According to Khan and Kumar, 2018b, s
i
(t)=γ
ii
e
i
(t)∈R and (ii) The adaptive controller (Khan and Kumar, 2019a):
(iii) The nonlinear control technique (Haris et al., 2020):
Figures 6 and 12(a)–(c) depict the error vector convergence behaviour accomplished by the controllers (13) and (27–29), respectively, demonstrating that the proposed RASC strategy (13) establishes the synchronization in 0.4 s with reduced oscillations. Figure 13(a)–(c) shows oscillatory behaviour; the error vectors do not achieve a steady state.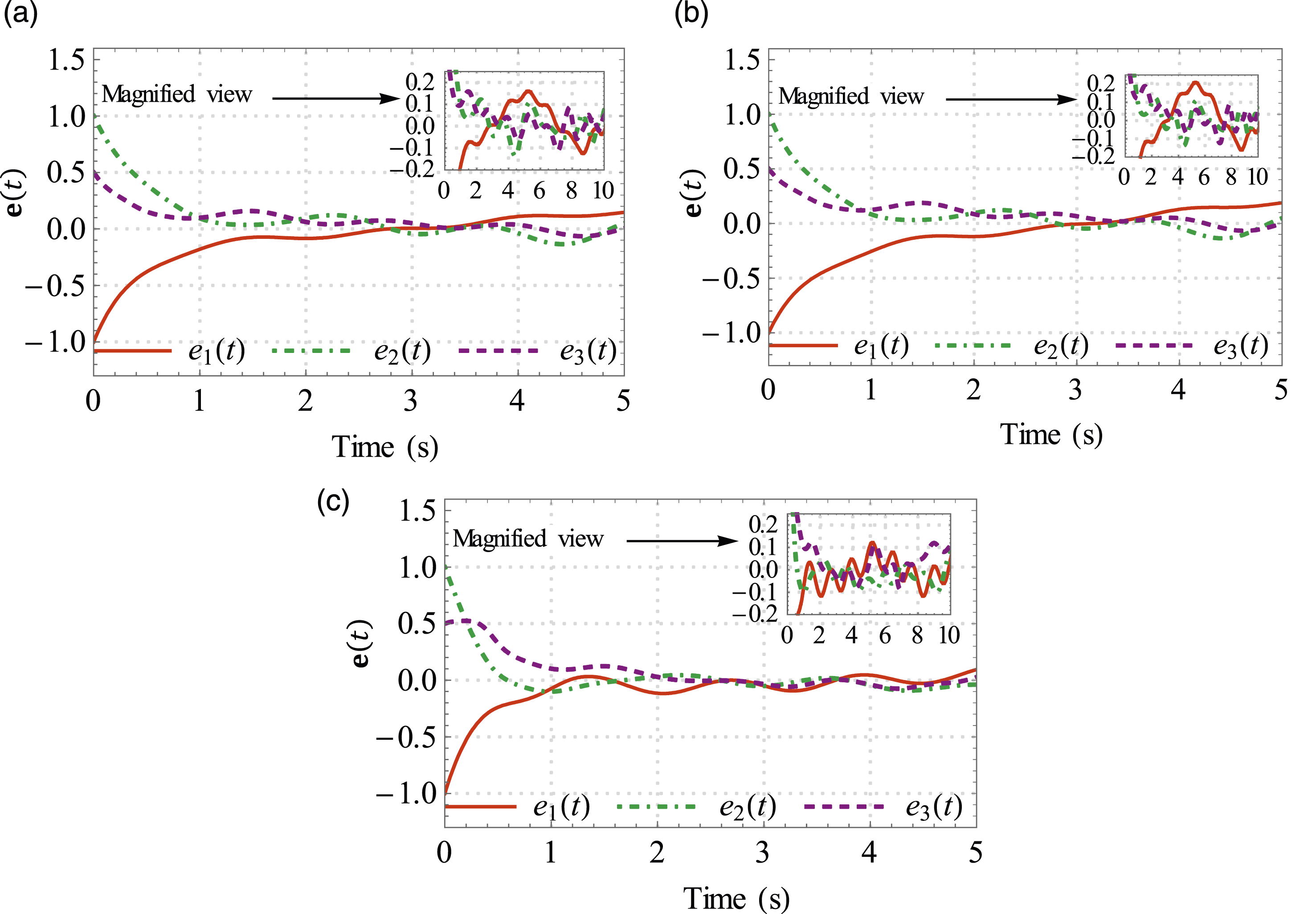
The proposed controller (13) synthesizes a control effort, shown in Figure 13(a), is chatter-free, and takes appropriate action for compelling the state error vector to the origin. Controllers in (27–29) synthesize similar control signals, but the synchronization error vectors remain oscillatory.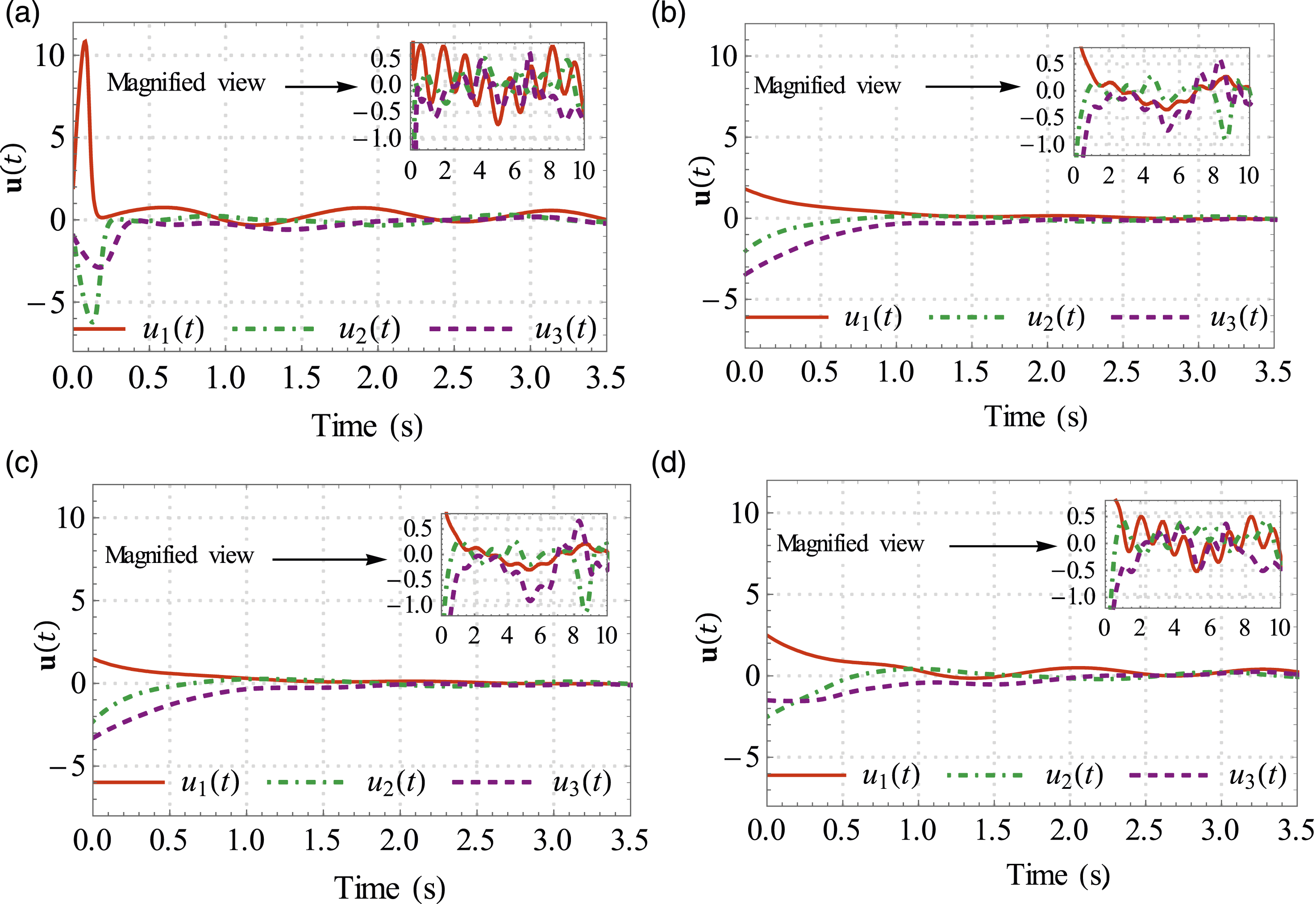
Comparison of computer simulation results.
Simulation results in Figure 14 illustrate that the proposed RASC approach (13) furnishes faster convergence by initially dissipating energy at a higher rate. In the zero's vicinity, the energy dissipation rate is low, which reduces oscillations in the closed-loop signals as well, where energy refers to V( Comparison of 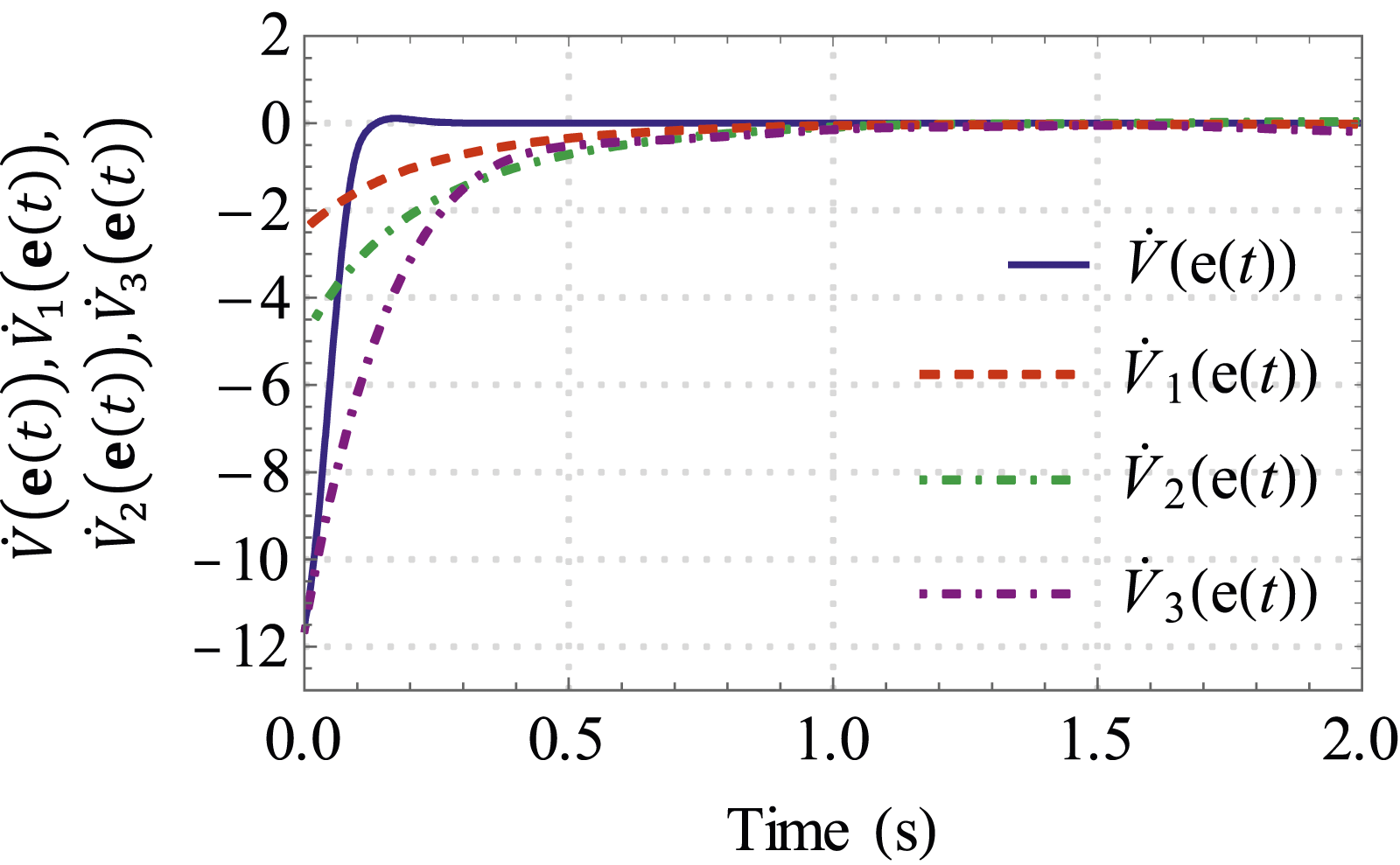
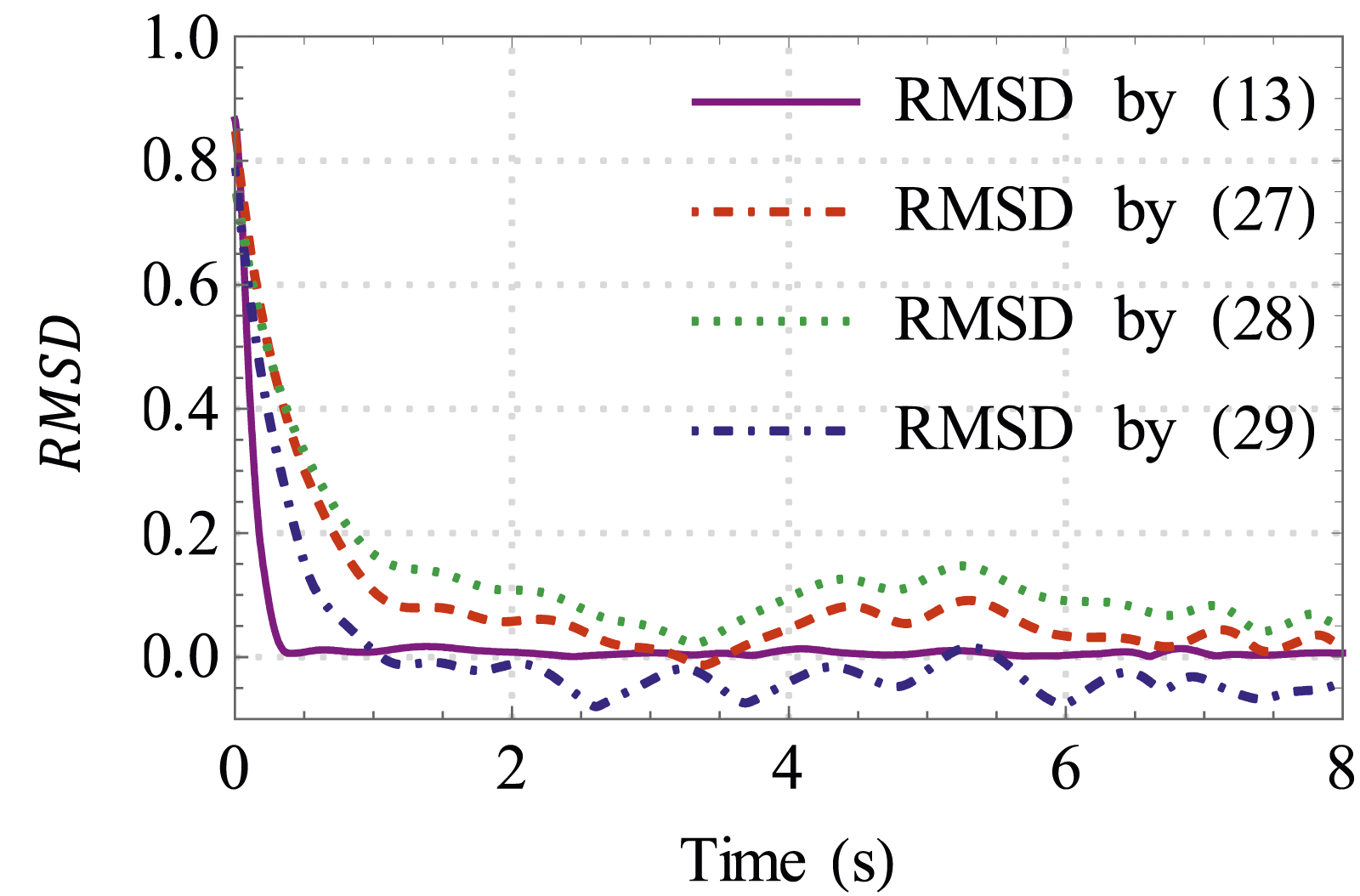
Figure 15 shows that the proposed RASC strategy (13) flourishes faster and smoother synchronization error convergence root-mean-square deviation (RMSD) than (27–29). Equation (30) represents the synchronization error RMSD. Comparison of RMSD.
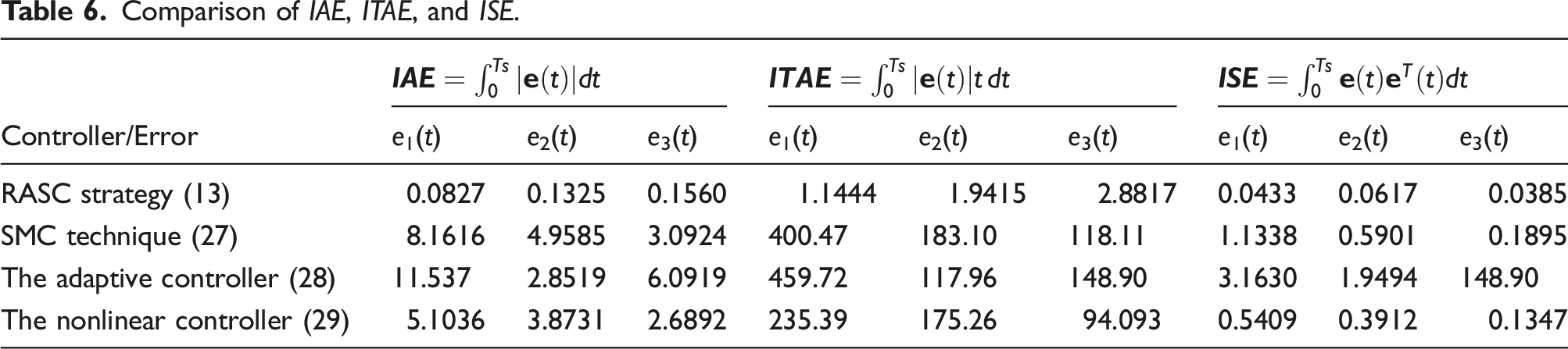
Comparison of IAE, ITAE, and ISE.
5.1.1. Control effort saturation consequences
In practice, actuation processes have saturation limits. Simulation results shown in Figure 16(a) and (b) and 17(a) and (b) are included for analysis to study the saturation effects on the synchronization error. The control effort should be kept below the actuator's saturation level. Adjusting the controller's parameters to ensure the control effort remains within a specific limit is possible. In the current situation, the synchronization process will take longer if the control effort exceeds the saturation point. It is evident from Figure 16(a) and (b) that the synchronization time is increased when the control input saturation is [−1, 1]. But still, it is faster than the simulation results of other algorithms shown in Figure 12(a)–(c). (a) Synchronization error vector using a control effort (13) and (b) the transient behaviour of the proposed RASC signals (13). (a) Synchronization error vector using a control effort (13) and (b) the transient behaviour of the proposed RASC signals (13).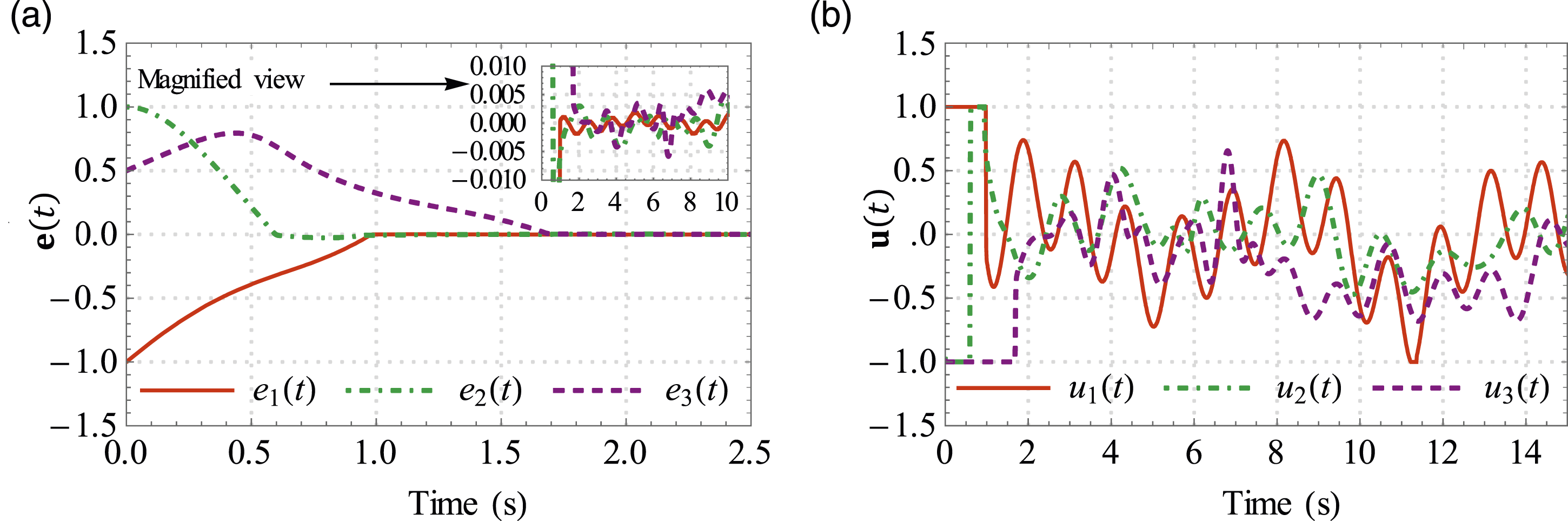
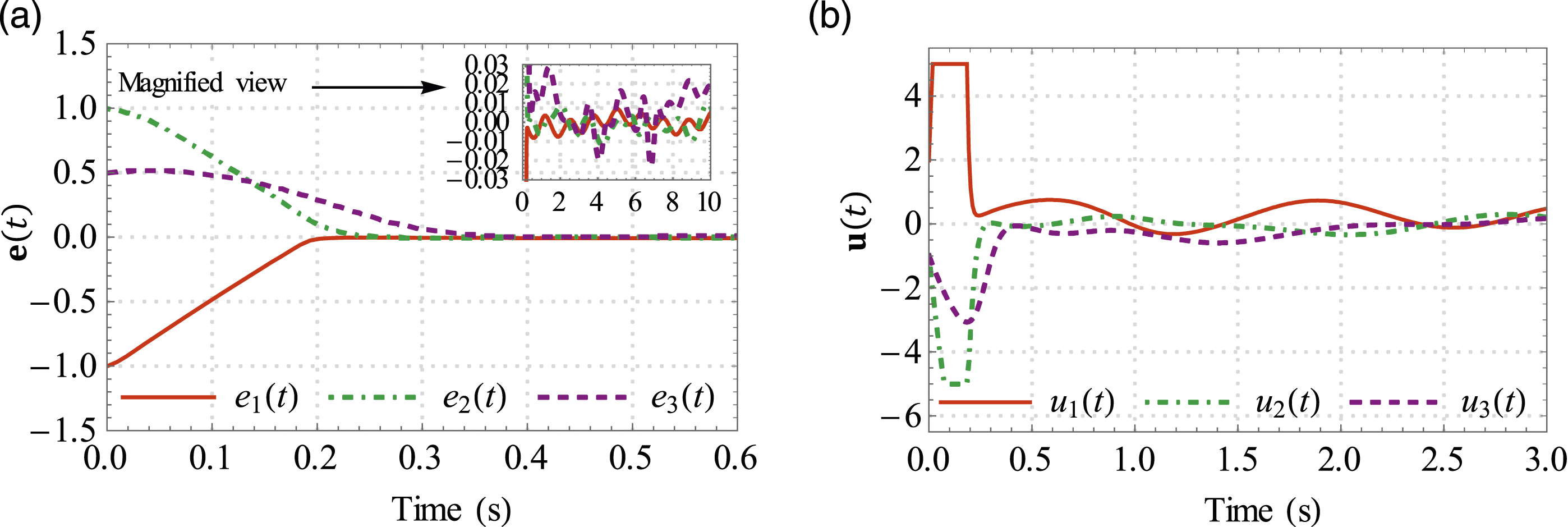
Further, the steady-state error in Figure 16(a) is closer to zero than in Figure 6. When control input saturation is [−5, 5], the behaviour is depicted in Figure 17(b); the error synchronization time is similar to Figure 6, while the steady-state performance is better than it. Improvement in the steady-state behaviour seems to be due to the reduced control effort as it transfers less energy to the state variables.
6. Conclusions
The article proposes a new robust adaptive control law that realizes synchronization between two identical three-dimensional chaotic satellite systems with time-varying unknown model uncertainties and exogenous disturbances. The mathematical proofs are based on the Lyapunov stability theory. The computer simulations analysis proves that the proposed adaptive controller achieves faster and smoother synchronization error convergence to zero. The closed-loop shows robust performance to the unknown model uncertainties and compensates for the effect of exogenous disturbances. Simulation results of many representative examples demonstrate that the proposed controller performs effectively and verifies the analytic findings. The article also provides a comparative simulation results analysis showing faster and non-oscillatory behaviour of the synchronization errors due to the chatter-free control effort. The saturated control effort simulation results show an increase in the synchronization error time and an improvement in the steady-state error.
Footnotes
Acknowledgements
The authors thank the anonymous reviewers for providing expert and constructive feedback that has helped enhance the article's presentation.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Appendix
The appendix uses (Λ#) for an equation number, where # denotes a positive integer.
Consider the following open-loop system.
The gradient of the system energy is a function of x1(t), x2(t), and x3(t), and it is denoted by
Bounded disturbances cause bounded variations in the output of a stable physical system, while unbounded disturbances do not guarantee bounded output for even stable systems. In spacecraft systems dynamics, gravitation rotation, mass variations, electronic components, solar radiation pressure, etc., are the sources of state-dependent and time-dependent disturbances, which are considered bounded. Hence, Assumption 1 is compliant.