
Abstract
The robotic arm is a complicated system with multiple inputs and outputs, strong coupling, containing uncertainties and nonlinearities. This study proposes a new practical robust control method based on the dynamics model and tracking error, including a model- and error-based proportional-differential feedback term and an error-based robust term. Specifically, the dynamics of the system are modeled using the Lagrangian method. Uncertainties are presumed to be time-varying but limited. Based on the Lyapunov method, the proposed controller has theoretically demonstrated the controlled system with uniform boundedness (UB) and uniform ultimate boundedness (UUB). Furthermore, the radius of the ultimately bounded hypersphere is arbitrarily small based on selecting appropriate design parameters. Based on the two-degree-of-freedom (2-DOF) planar robotic arm experimental platform, the self-developed rapid controller prototype CSPACE-RT is intended to eliminate tedious programming or debugging, significantly simplifying the experimental process. Finally, numerical simulation and experiment results verified the excellent control performance of the suggested controller.
1. Introdution
With the rapid development of digital computer technology, robotics has become one of the focused research fields nowadays (Dean-Leon et al., 2017; Sumartojo and Lugli, 2022; Lee et al, 2022). Robots are designed to assist or replace humans in completing actual work and play an essential part in manufacturing. As the most crucial execution terminal of a robot, the robotic arm is the key to completing a specific task. Robotic arms are increasingly employed in numerous fields, including industrial manufacturing (Alandoli et al., 2022), aerospace (Santos et al., 2022), marine exploration (Sivčev et al., 2018), medical surgery (Troccaz et al., 2019), and agricultural harvesting (Tang et al., 2020) for the advantages of simple structure, high space utilization, ample working space, high flexibility, and multiple postures. The different needs of various fields have posed higher challenges to the motion control of robotic arm systems. Improving the stability, accuracy, and speed of the robotic arm system control to perform complex and delicate operations is critical.
However, the robotic arm system is a typical nonlinear electromechanical system with multiple inputs and outputs, strong coupling, and uncertainty (Zhai and Xu, 2021). When there are modeling errors, uncertainties and unknown perturbations in the robotic arm system, it is challenging to provide high-accuracy trajectory tracking control of the robotic arm for controllers without robustness. Therefore, designing a control scheme that can effectively resist uncertainties and guarantee that the robotic arm system achieves high-precision motion is essential.
Achieving trajectory tracking of the robotic arm requires designing an excellent controller to ensure the dynamic performance of the system. Many contributions have been published addressing the control challenges for nonlinear systems. The typical control methods are proportion-integration-differentiation (PID) control (Ang et al., 2005; Gaidhane et al., 2019; Zamani and Etedali, 2023), active disturbance rejection control (ADRC) (Han, 2009; Chen and Chen, 2021; Fareh et al., 2021), and adaptive control (Villani et al., 1999; Nikdel et al. 2017; Shi et al., 2021). Conventional PID control is still extensively utilized in real industrial realms since its simplicity and lack of dependence on the system model. However, the single PID control algorithm with low control accuracy and poor robustness is challenging to be applied to nonlinear systems. Inherited from PID, ADRC is widely used because of its simple implementation, excellent performance of control, and resistance to interference. ADC maintains the system in a better state by adjusting the control law through system error instantly. It, however, needs a considerable amount of computation and requires a high degree of real-time performance of the system.
Many advanced control algorithms have been proposed based on the increasing computer data processing power. In Ref. Ma and Huang (2020), a proposed novel adaptive law manipulator control scheme that approximates the neural network to the unmodeled part of the dynamics is presented. Yin et al. (2021) uses fuzzy logic system and adaptive law to compensate the uncertainty of high frequency and low frequency, respectively. As a result, the trajectory tracking performance is better. In Ref. Lai et al. (2017), the pose of the planar four-link underdriven robotic arm at different stages of motion is optimized using genetic algorithms and separate controllers are designed.
In addition to the above control methods, robust control is commonly utilized in actual engineering to compensate for the structural and non-structural uncertainty portions of the system. It enables the system to achieve a relatively good control effect in the case of a bounded uncertainty range. The main robust control methods are H ∞ control (Xu and Chen, 2002; Figueredo et al., 2021), sliding mode control (SMC) (Islam and Liu, 2011; Baek et al., 2016; Aboserre and El-Badawy, 2021), and adaptive robust control (ARC) (Solanes et al., 2018; Yin and Pan, 2018; Rad et al., 2020). Whereas H ∞ control takes uncertainty into account, the method is not model-based. Thus, it is not easy to achieve high speed/high precision in practice. Theoretically, SMC is completely robust to uncertainty. But, its properties can lead to high frequency chattering in the system. Another way to improve control is by using the state, input and output information of the controlled object system, ARC adjusts the structure or parameters of the controller online. This needs the design of the adaptive law and is relatively complex in practical applications.
A new practical model- and error-based robust controller is proposed considering the uncertainty of the internal parameters of the system and the unknown external perturbations. The proposed controller comprises a model- and error-based proportional-differential (PD) control term and an error-based robust control term. Specifically, the nominal and uncertain parts constitute the dynamics model of the system. The cumulative influence of all uncertain parts on the system is represented by the function
The proposed controller has the advantages of a simple structure, a small number of parameters, and a simple parameter adjustment process compared with other robust controllers, which is easier to apply to practical engineering.
This paper proposes a high-precision trajectory tracking control scheme for the robotic arm system with the following main contributions. 1. The proposed controller has the advantages of both traditional PD control and robust control, which guarantees accurate trajectory tracking of the robotic arm system for unknown uncertainties of system parameters. 2. By constructing an effective Lyapunov function, the proposed controller is theoretically verified to have uniform boundedness and uniform ultimate boundedness, ensuring the stability of the practical system. 3. The self-developed rapid control prototype CSPACE-RT is intended to improve experimental efficiency. Numerical simulations and experimental results of the suggested control algorithm are given on the 2-DOF planar robotic arm experimental platform. A comparative analysis with other control algorithms is performed. It is concluded that the suggested control approach can provide the system with high-accuracy trajectory tracking and powerfully robust performance.
This paper is organized as follows. Section 2 constructs the dynamics model of the robotic arm nonlinear system. Section 3 outlines the design process of the proposed controller and verifies its stability theoretically. Section 4 presents numerical simulations and experimental validation of the proposed controller and compares the results with PID and MEBPD control algorithms. Section 5 gives conclusions for the work in the whole paper.
2. The derivation of the dynamics model
The dynamics mainly research the relationship between the force and the kinematics of the research object during the movement. The dynamic model must be established and analyzed for a complex nonlinear robot system to realize real-time control.
The main research methods of robot dynamics are the Lagrangian method, Newton-Euler method, Gauss method, etc. Among them, the Lagrangian dynamic algorithm is an energy-based dynamic method. This approach requires identifying the overall energy characteristics of the system rather than examining its interior intricacies. Therefore, we select the Lagrangian technique to develop the dynamic model of the robotic arm.
For any robotic arm system with n-DOF, the Lagrangian equation is as follows:


Considering that the robotic arm may be subjected to unknown external perturbations like load variation and friction in the working environment. Combining equations (1) and (2), the general dynamics model of the n-DOF robotic arm can be written as

An appropriate friction model is crucial for modeling the dynamics of the robotic arm. The accuracy of the friction model of the system will greatly reduce chattering and significantly increase the trajectory accuracy during the motion of the robotic arm (Liu et al., 2016). The traditional friction model is usually discontinuous or piecewise continuous, which will lead to the discontinuous robust controller designed based on the friction model. Therefore, we choose the continuously differentiable friction models for this problem-the Coulomb and viscous friction models. The specific expression is as follows:
In general, using a symbolic function directly in the Coulomb friction model results in discontinuous and nonsmooth functions in the dynamics model, which affects the performance of the controller. Here the sign function can be replaced by the hyperbolic tangent function, thus ensuring its continuous and smooth properties.

There are modeling errors and unmodeled parts of the robotic arm system dynamics model. These can be considered uncertainties. Equation (3) can be rewritten as

Uncertainty in equation (6) is denoted by the parameter σ ∈ R n . Suppose the uncertainty in the robotic arm system is time-varying but bounded, and there exists a known set sum ⊂ R n that satisfies σ ∈ ∑ ⊂ R n holds.
The system matrix of the above dynamics model (equation (6)) has the following properties (Yang et al., 2018):
For all θ, J(θ, σ, t) > 0 is symmetric and uniformly bounded. That is

For all θ and

3. Controller design and stability proof
3.1. Controller design
The controller design of a mechanical system needs to ensure excellent performance (accuracy, stability, speed, and robustness) of the motion of the controlled object. The proposed controller enables each joint to track the given trajectory with the desired dynamic quality for a n-DOF robotic arm.
The desired tracking trajectory θ
d
(t) ∈ R
n
, t ∈ [t0, t1] for a n-DOF robotic arm system, thus


According to equation (9), equation (6) can be rewritten as
The internal uncertainty of the system is mainly caused by the system matrix model error in the dynamic model, where the uncertainties in J (⋅), C (⋅), G (⋅), and F (⋅) are separated out as
In general, using the nominal terms


When all uncertainties are ignored, that is
The designed controller guarantees that the trajectory tracking error remains within the set boundary. The approach to ensure given performance limitations may be found in Ref. Chen (1986). The deterministic robust control technique described in this work may be written as




Based on the proposed controller structure shown in Figure 1, the first part of the controller is a nominal system. The last item is the compensation for system uncertainty, reducing the impact of uncertainty on the system. The controller (equation (16)) consists of the model- and error-based PD control (non-error-based conventional PD control) and robust term. The structural block diagram of the proposed robust controller.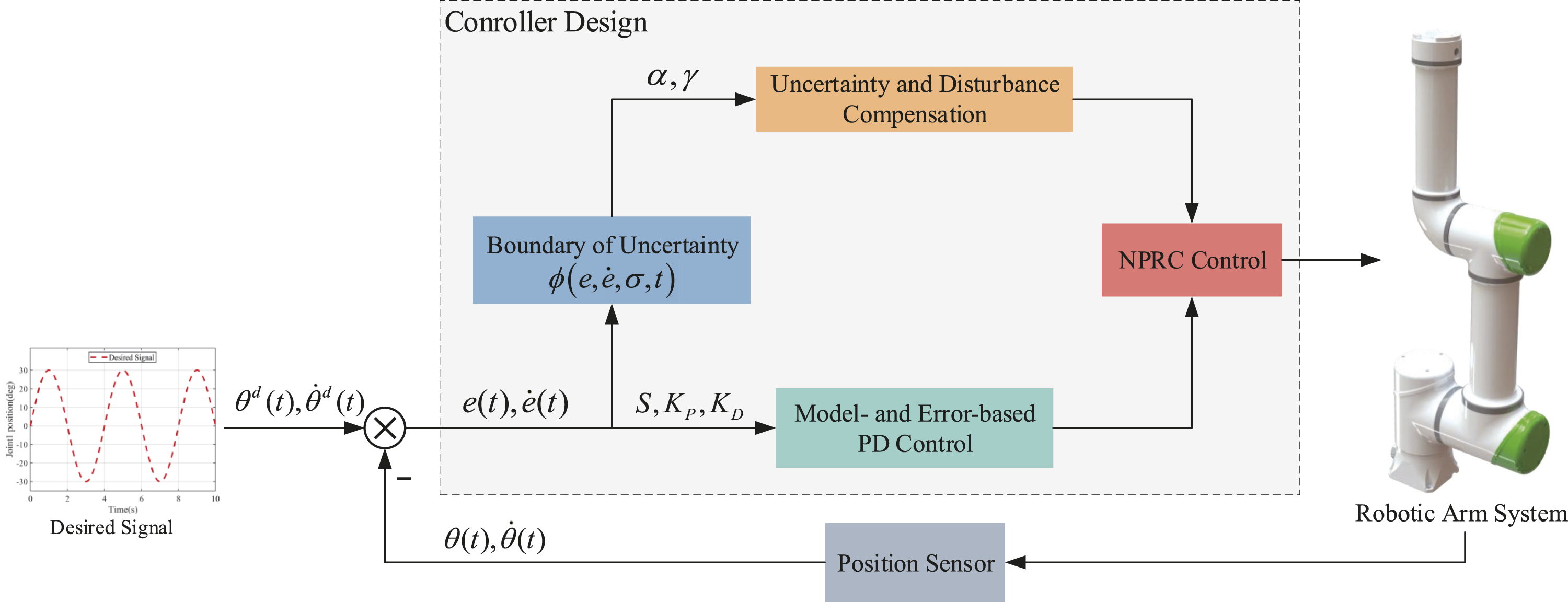
3.2. Proof of stability
Applying the suggested controller equation (16) to the planted object system (equation (6)) must prove that the trajectory tracking error 1) Uniform boundedness: There exists a z(x) < ∞ such that ‖θ(t)‖ ≤ z(x) for any x > 0 with ‖θ(t0)‖ ≤ x, ∀t ≥ t0. 2) Uniform ultimate boundedness: For any x > 0 with ‖θ(t0)‖ ≤ x, there exists a
The stability of the equilibrium state is determined by selecting the Lyapunov candidate energy function and examining whether the function decays with time. Firstly, we choose a Lyapunov function candidate and verify that it is valid (positive definite and decrescent). The candidate function is selected as According to Property 1, J (θ, σ, t) is bounded. Substituting the Inequality (7) into equation (21), we get Obviously, matrix Ψ
i
> 0, ∀i. Thus Similarly, according to the upper bound of J (θ, σ, t), there is That is Combine Inequalities (24) and (27), we can get Let Further, substituting With Property 2 and equation (12), By equation (14), there is According to equation (19) and equation (20) Combine Inequalities (32), (33), and equation (34), Substituting Inequality (35) into equation (28), there is For all Consequently, the controller (equation (16)) can assure the uniform boundedness and uniform ultimate boundedness of the robotic arm system (equation (6)). First is the uniform boundedness, for any x > 0 with Second is uniform ultimate boundedness, for any Such that












4. Numerical simulation and experimental validation
Based on the control scheme (equation (16)) proposed above, numerical simulation and experimental verification on the controlled object 2-DOF planar robotic arm are performed in this section. Figure 2 illustrates a simplified 2-DOF planar robotic arm model. Where m1 and m2 are masses of the first arm and the second arm, θ1 and θ2 are the positive rotation angles of joints 1 and 2, l1 and l2 are the lengths of the two arms, respectively. Points C1 and C2 are the centroid of the first arm and the second arm. lc1 is the distance of the point C1 to the origin point O1, and lc2 is the distance of the point C2 to the origin point O2. The schematic representation of the simplified 2-DOF planar robotic arm.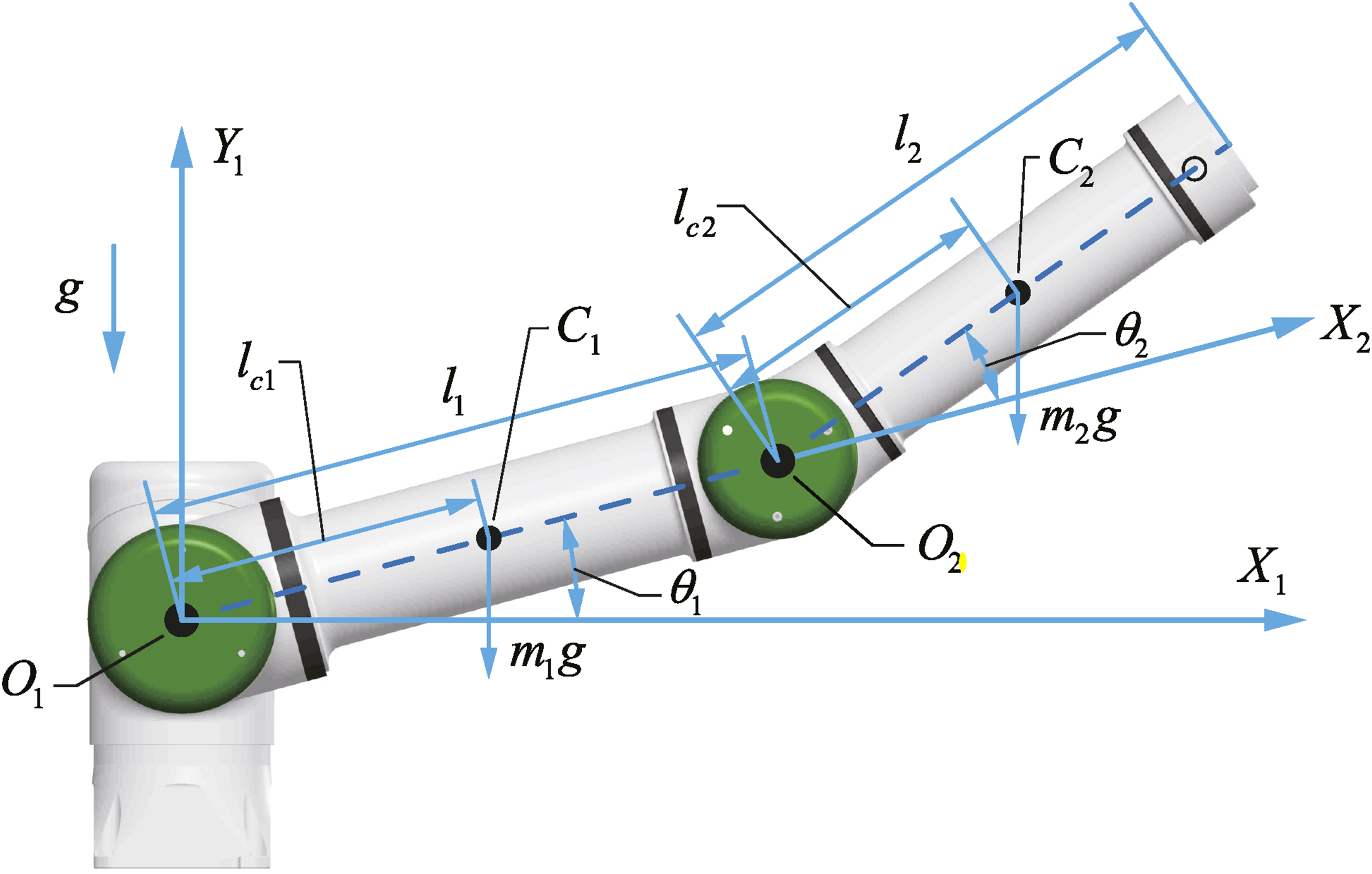
The comparison with other control algorithms can better demonstrate the superiority of the proposed control algorithm. In addition to the proposed novel practical robust control (NPRC), the comparison control algorithms include classical PID control and model- and error-based PD control (MEBPD). Considering the relative fairness, the simulation and experiments are repeated several times for each control algorithm in the same environment, and the optimal performance of each control algorithm is selected for comparison.
4.1. Parameters selection
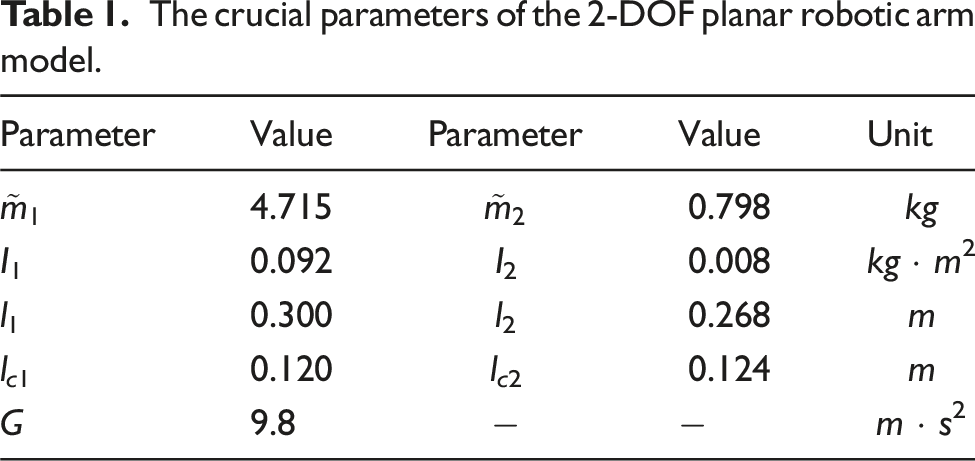
Analyze and determine the relevant parameters for each algorithm at the optimal performance, as detailed below.



The crucial parameters of the 2-DOF planar robotic arm model.
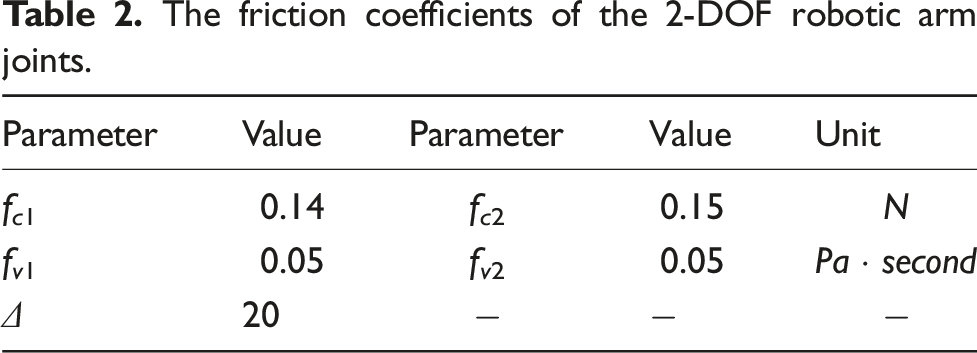
Further determine the parameters in the frictional forces to which the system is subjected. Similarly, according to the friction model in equation (4), we can get
The friction coefficients of the 2-DOF robotic arm joints.
In addition, the proper selection of parameters in the control algorithm can enhance the performance of the controller and reduce the control cost.
Among them, the diagonal matrix S directly affects the convergence rate of 

Control parameters for different controllers.
4.2. Numerical simulation results
The introduction of the reference step signal and the sine signal can compare the transient performance, steady-state performance, and trajectory tracking performance of each control algorithm more comprehensively. The step signal is
In practical engineering, the precise model of the research object is difficult to obtain. Therefore, we introduce uncertainties Δm1, Δm1, ΔF1, and ΔF2 (which are bounded) in the MEBPD control algorithm and NPRC control algorithm to better compare the robust performance of each control algorithm. The uncertainties are assumed as
In the sinusoidal signal trajectory tracking, we set an initial error. Otherwise, the trajectory tracking state can be observed more distinctly. Moreover, the robust performance of each control algorithm can be verified. The initial error can be described as

The simulation results are as follows:
4.2.1. Step response
Figure 3(a) and (b) illustrate the step response simulation results of the 2-DOF planar robotic arm system under the different control schemes. The simulation results of joint 1 are used as an example to analyze and compare each of the three control algorithms. Regarding terms of response speed, NPRC took about 0.172 s to reach the steady-state, and PID and MEBPD took about 0.672 s and 0.354 s, respectively. And the steady-state error range for the NPRC algorithm was approximately e1 = −3.077 × 10−5 ∼ 3.073 × 10−5 deg, and the steady-state error ranges for PID and MEBPD were approximately e1 = −2.269 × 10−4 ∼ − 1.274 × 10−4 deg and e1 = −1.139 × 10−4 ∼ 1.143 × 10−4 deg, respectively. Similarly, for joint 2, the NPRC took about 0.131 s to reach a steady-state, and the PID and MEBPD took about 0.519 s and 0.311 s, respectively. The steady-state error range for NPRC was approximately e2 = −1.554 × 10−5 ∼ 1.562 × 10−5 deg, and for PID and MEBPD was approximately e2 = −1.555 × 10−4 ∼ − 6.395 × 10−5 deg and e2 = −5.690 × 10−4 ∼ 5.688 × 10−4 deg, respectively. The above analysis indicated that the NPRC control algorithm has a faster response and a smaller error range than the other two control algorithms for both joints 1 and 2. The position step response simulation curves of the two joints of the 2-DOF planar robotic arm.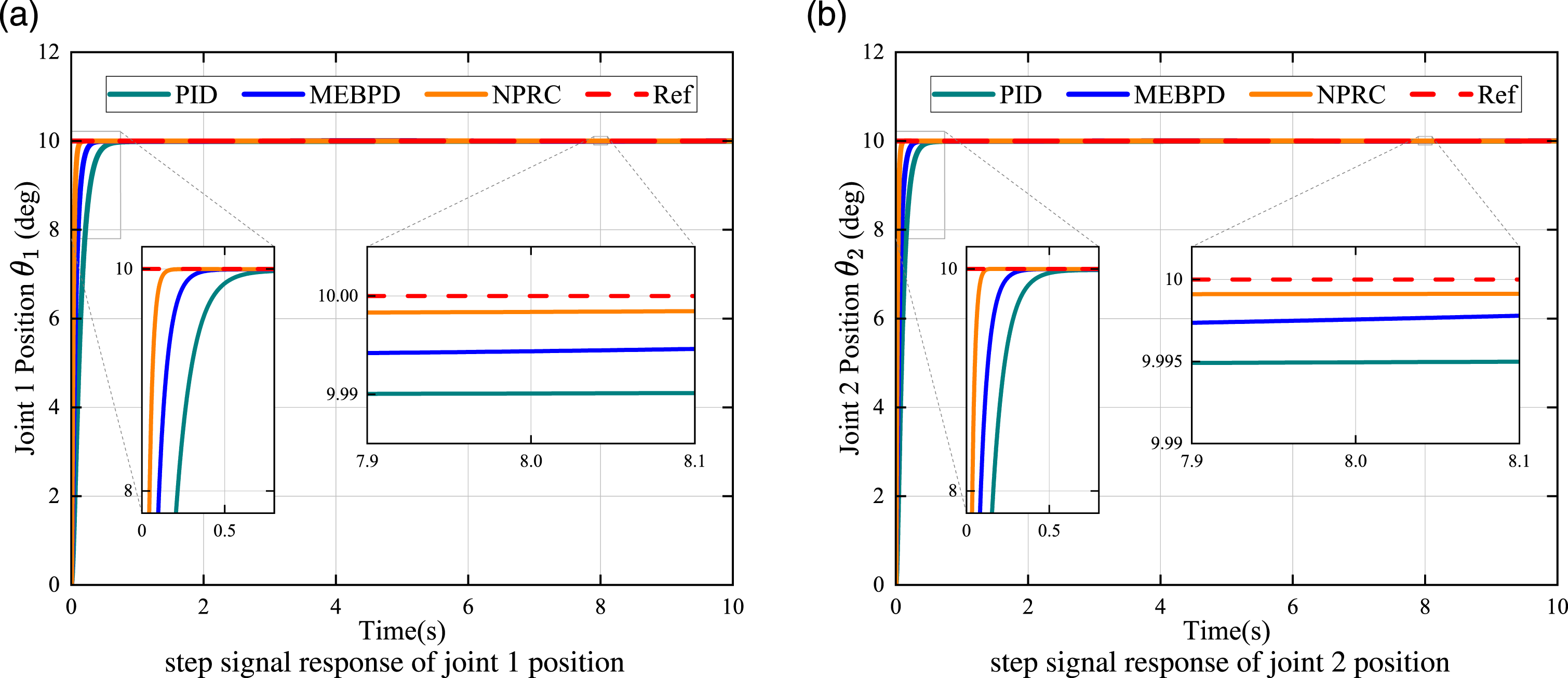
4.2.2. Sinusoidal signal tracking
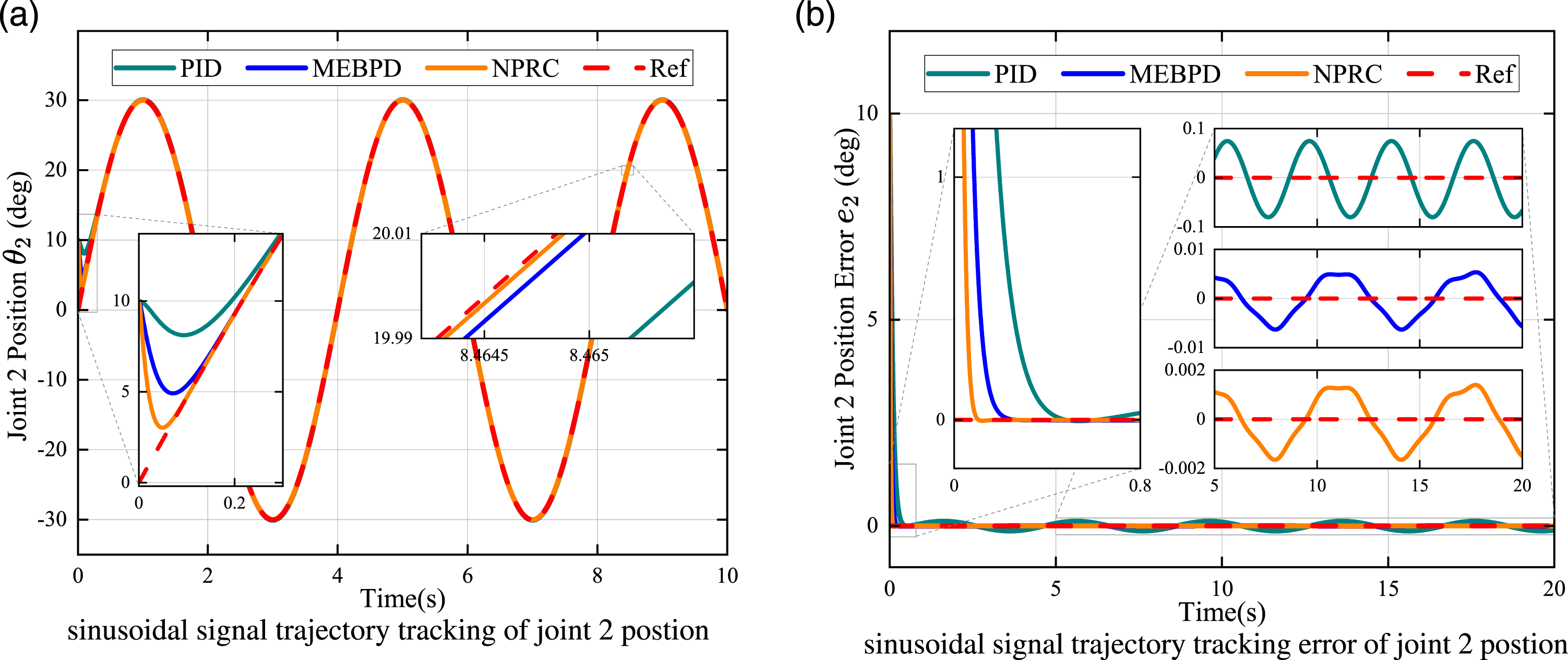
Figures 4(a)–5(b) show the simulation results of sine signal trajectory tracking for the three control algorithms. The NPRC control algorithm is the first to catch up with the sinusoidal signal for a given initial error as indicated in Figures 4(a) and 5(a). It can maintain a small tracking error to track the desired trajectory as shown in Figures 4(b) and 5(b). Specifically, the NPRC control algorithm has tracking errors of e1 = −0.0045 ∼ 0.0041 deg, e2 = −0.0017 ∼ 0.0014 deg, while the PID and MEBPD control algorithms have tracking errors of e1 = −0.1106 ∼ 0.0876 deg, e2 = −0.1205 ∼ 0.1120 deg, and e1 = −0.0113 ∼ 0.0104 deg, e2 = −0.0.0063 ∼ 0.0054 deg, respectively. The above indicates that the NPRC control algorithm reaches up to the desired trajectory faster and maintains a minor tracking error than the other control algorithms, whether joint 1 or joint 2. The sinusoidal signal trajectory tracking simulation curves of the joint 1 of the 2-DOF planar robotic arm. The sinusoidal signal trajectory tracking simulation curves of the joint 2 of the 2-DOF planar robotic arm.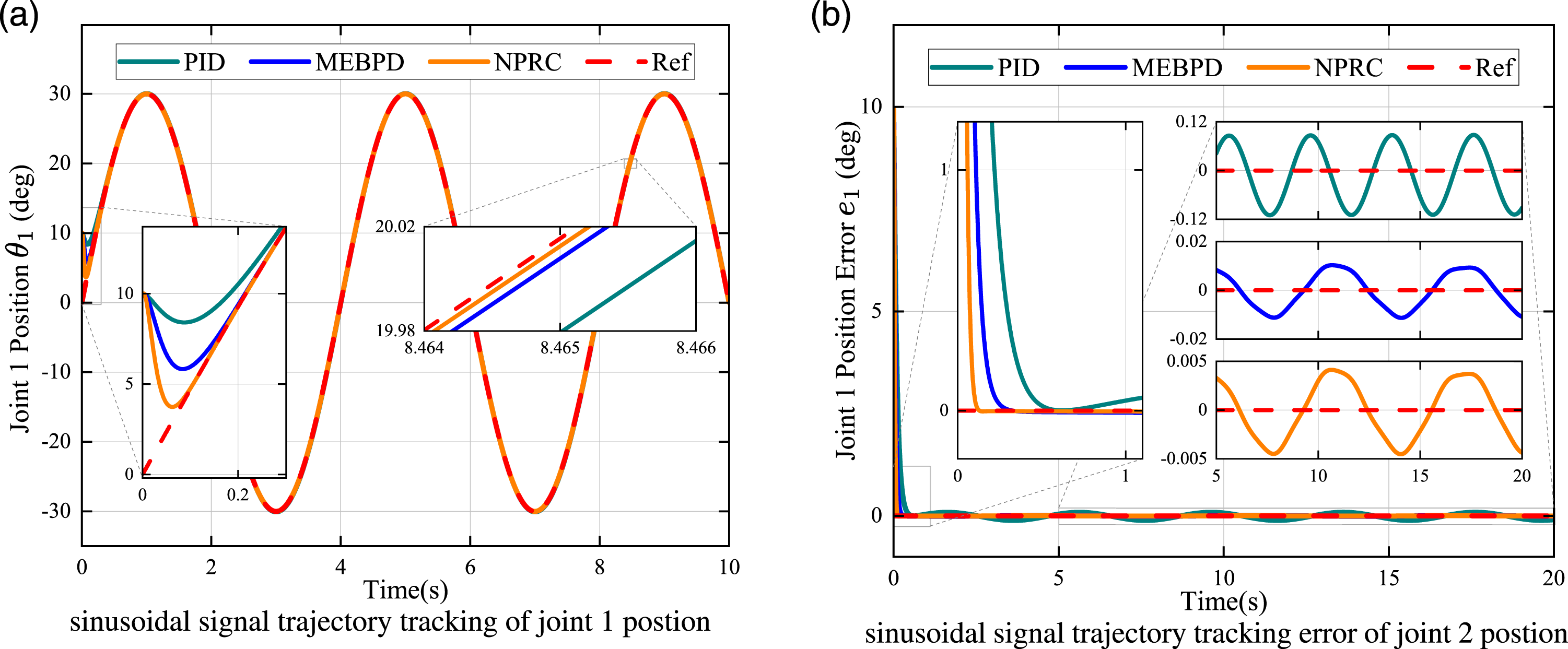
From the above simulation results, it can be concluded that the proposed controller can theoretically ensure the superior dynamic performance of the 2-DOF planar robotic arm.
4.3. Experimental platform introduction
The main experimental setup mainly consists of a 2-DOF planar robotic arm, personal computer, CSPACE-RT control system, and loads of different masses as shown in Figure 6. Each joint of the 2-DOF planar robotic arm integrates a 20,000-line incremental encoder, a 17-bit absolute value encoder, a frameless torque motor, a harmonic reducer, and a servo drive. The incremental encoder is used to detect the rotation angle of the motor, and the absolute value encoder is used to detect the angle of the output shaft (link) of the harmonic reducer. The CSPACE-RT control platform enables efficient verification of control algorithms and is a rapid controller prototype (real-time) system composed of digital signal processors (DSP). Experimental setup of 2-DOF planar robotic arm.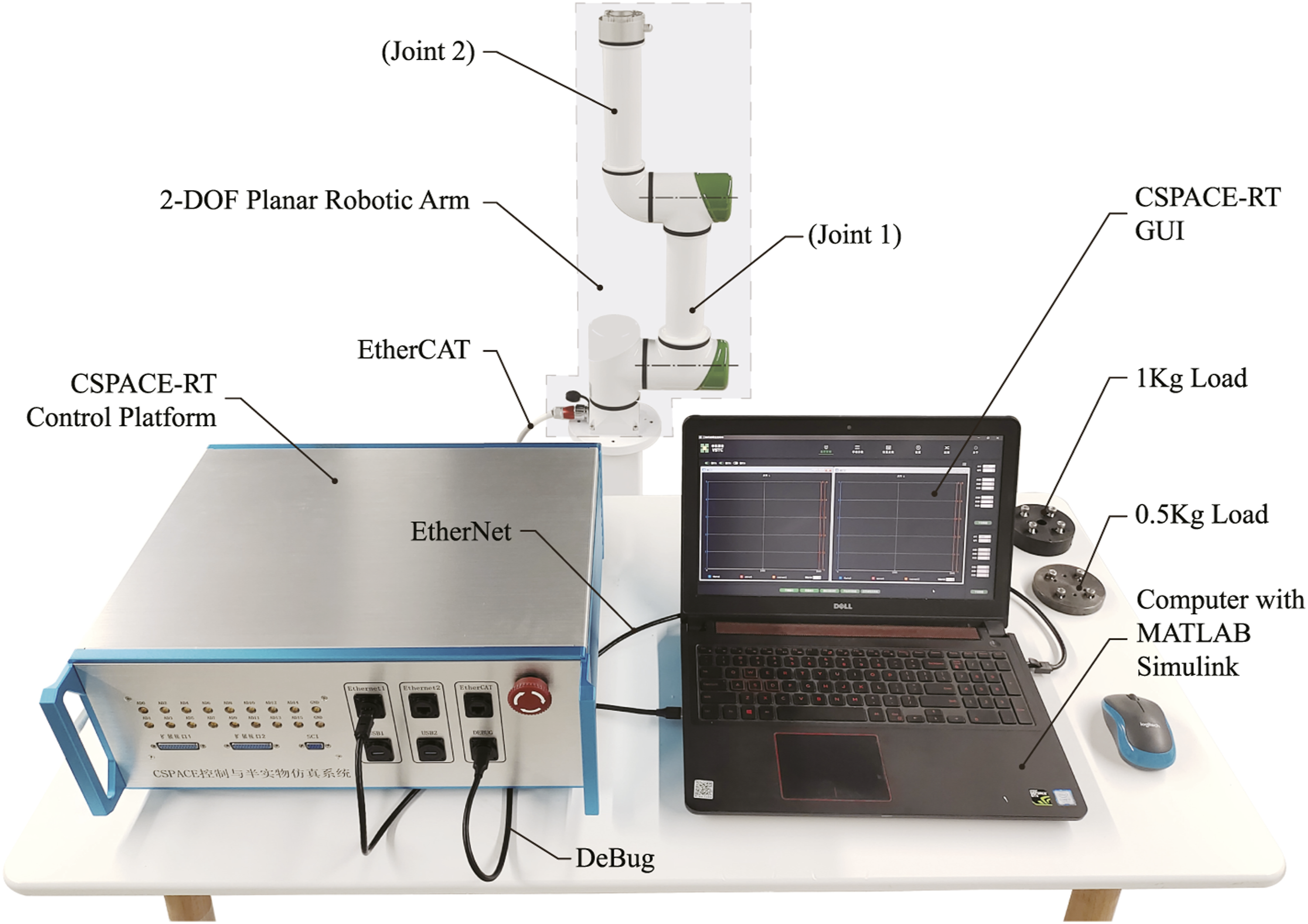
The software for the CSPACE-RT control system uses the Texas Instruments C2000 Processor Embedded Encoder Support Package based on MATLAB R2020b or later. The support package integrates all peripheral I/O drivers of DSP C2000 in a graphical way, which is convenient for users to integrate the control algorithm into the experimental object and realize the fast verification of the algorithm. By associating MATLAB/Simulink with CCS compiling environment in advance, the Simulink model can be converted into a real-time executable file through an embedded coder toolbox and downloaded to the DSP chip for running. The CSPACE-RT GUI is a graphical user interface developed based on the MATLAB App Designer environment. On the right side of the GUI, we can modify six data under different group numbers to change different variables. Up to 42 variables can be modified to realize online modification of variable values. There are three windows in the middle of the interface, and each window can display the curve of three variables, equivalent to a real-time display of nine variable data. The simple interface operation function provides great convenience for our experiment.
The CSPACE-RT control system is jointly developed with MATLAB/Simulink, enabling the simulation to be quickly transferred to real-time control and speeding up the algorithm development cycle. This development method is convenient for researchers to verify the algorithm design and performance. The flowchart for developing and verifying the control algorithms using the CSPACE-RT control system is shown in Figure 7. Flowchart of the algorithm development using the CSPACE-RT control system.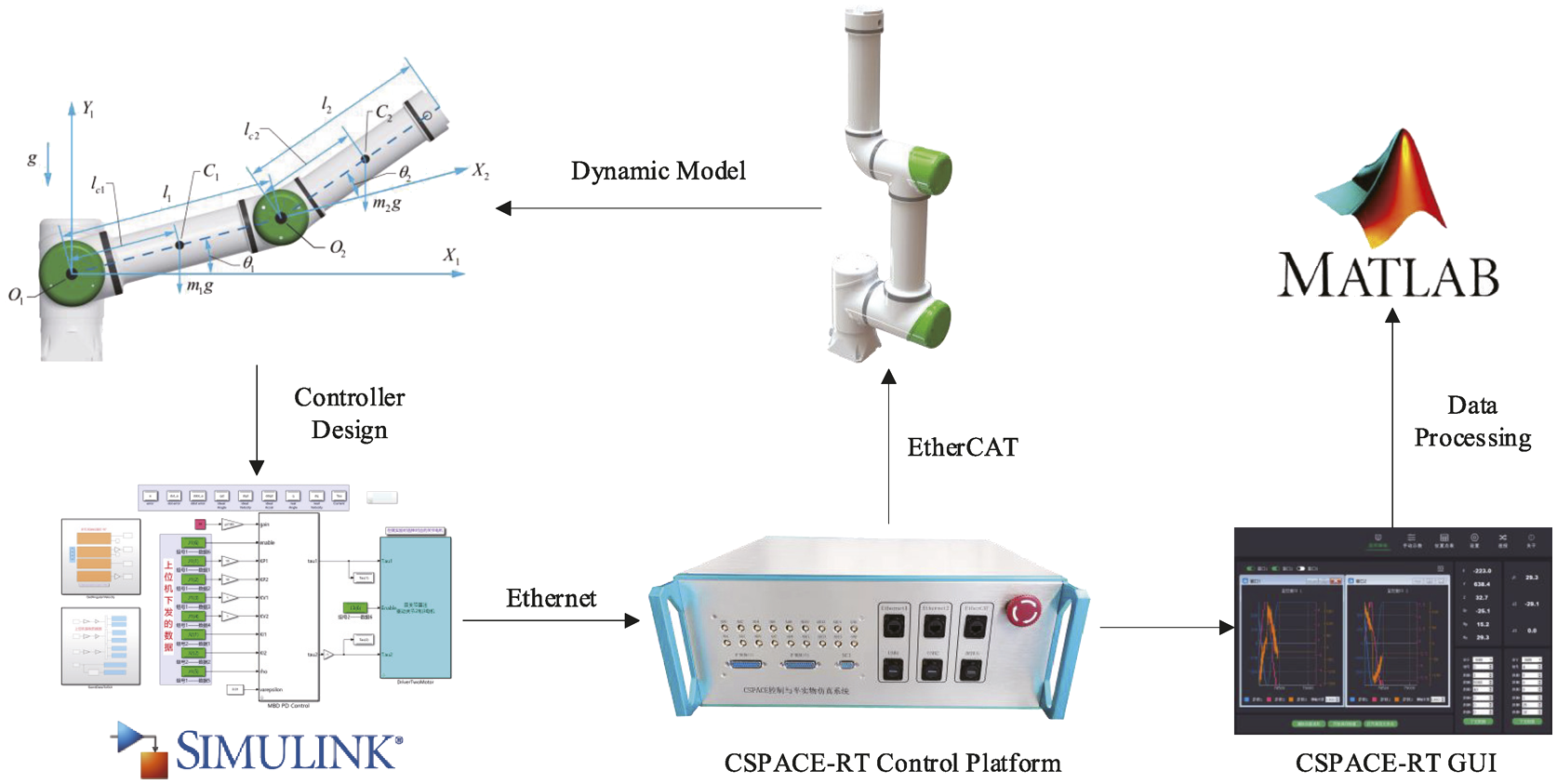
The steps for developing and validating an algorithm implementation using the CSPACE-RT control system are as follows.
Dynamic model and controller design in MATLAB/Simulink based on the controlled object.
The conversion of the model into C codes using MATLAB, which can be downloaded and run on the CSPACE-RT control platform.
Compile and download the generated C codes to the CSPACE-RT control platform using the Code Composer Studio (CCS) software.
Set the sampling time to 0.005 s and run the C codes on the CSPACE-RT control platform. Real-time adjustment of critical parameters of the algorithm by observing the controlled object motion curves in the GUI and saving and processing motion data.
4.4. Experiment validation
Based on the 2-DOF planar robotic arm platform, the performance of each control algorithm in practical applications is further investigated, and the results are analyzed and compared. Similarly, the relevant control parameters are selected with reference to Table 3, where the performance metrics include transient performance, steady-state performance, and robust performance for varying load perturbations. The control experiment is summarized in three steps: (i) The driver receives the joint position of the robotic arm from the absolute encoder. (ii) The angle and current signals from the drive are transmitted to the CSPACE-RT controller via the Control Automation Technology Ethernet (EtherCAT) bus, which calculates the control signals in combination with the control algorithm. (iii) The control signals are transmitted to the drive via the EtherCAT bus and amplified to drive the motor movement.
4.4.1. Transient performance
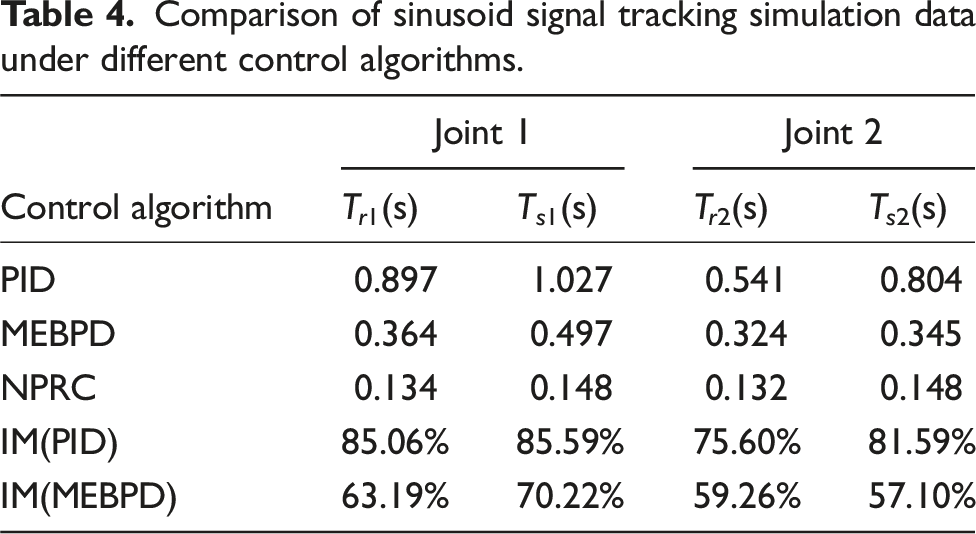
The step signal amplitudes used in the experiment are both 10°. Figure 8(a) and (b) show experimental curves of the step response of the 2-DOF planar robotic arm. For both joint 1 and joint 2, the NPRC control algorithm reached the desired position faster than the other control algorithms. More details can be obtained from Table 4, where T
r
represents the rise time, T
s
represents the steady-state time, and IM represents the degree of improvement relative to other control algorithms. For all control algorithms, the steady-state error of joint 1 is larger than that of joint 2, and joint 1 produces more chatter than joint 2, which may be due to the influence of joint 1 by the weight of joint 2. Also, the NPRC control algorithm achieves steady-state with less error and chatter than other control algorithms, which is attributable to the robustness term of the controller. The position step response experimental curves of the two joints of the 2-DOF planar robotic arm. Comparison of sinusoid signal tracking simulation data under different control algorithms.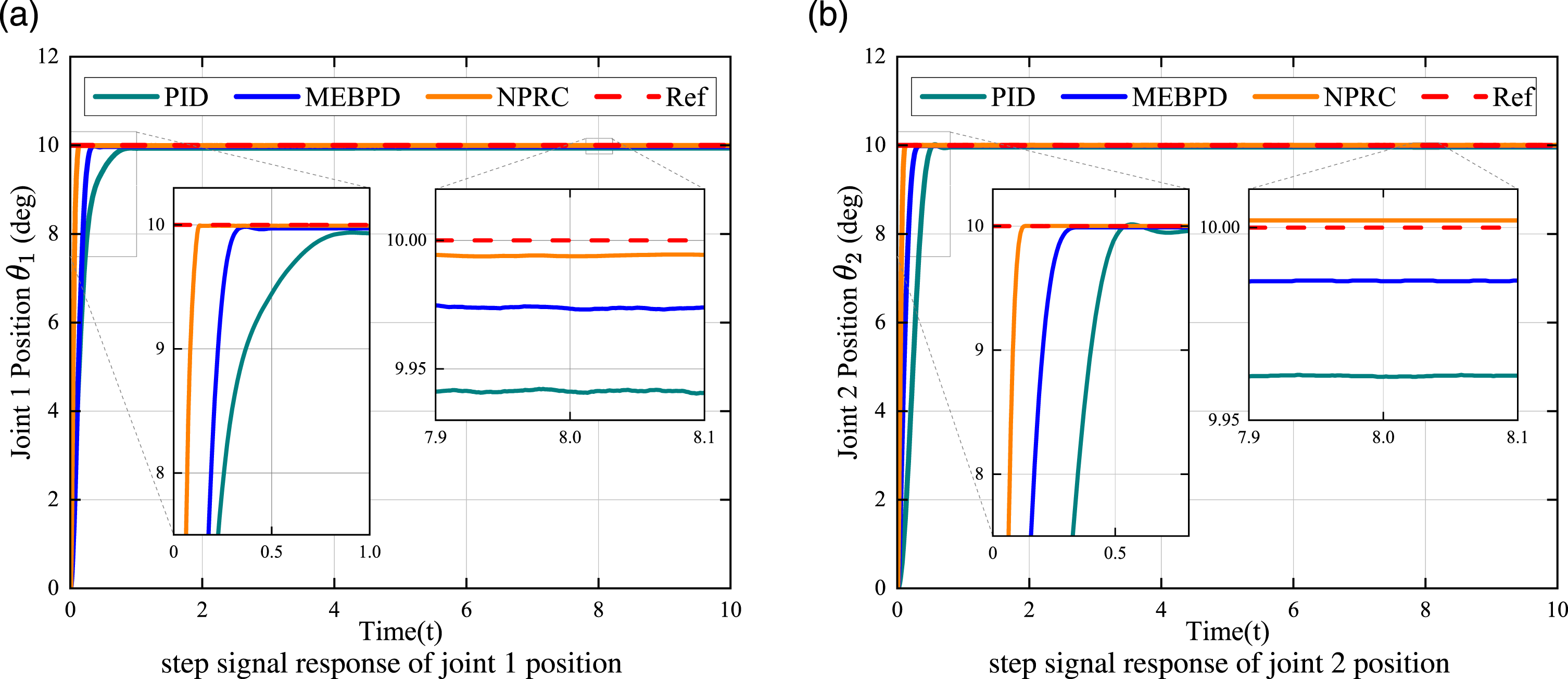
Specifically, the steady-state errors of the PID, MEBPD, and NPRC control algorithms are e1 = 0.0578 ∼ 0.0661 deg, e2 = 0.0356 ∼ 0.0382 deg, e1 = 0.0243 ∼ 0.0277 deg, e2 = 0.0088 ∼ 0.0111 deg, and e1 = 0.0029 ∼ 0.0068 deg, e2 = −0.0018 ∼ − 0.0011 deg, respectively.
4.4.2. Steady-state performance
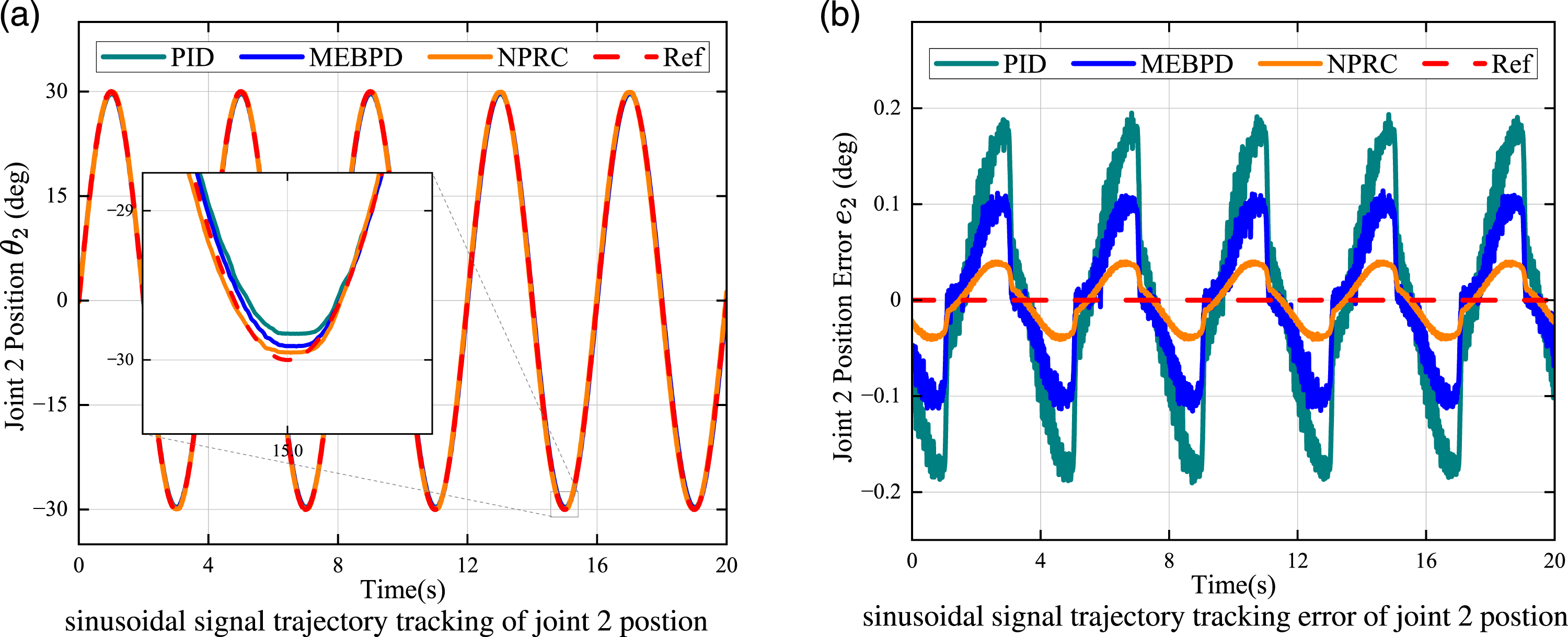
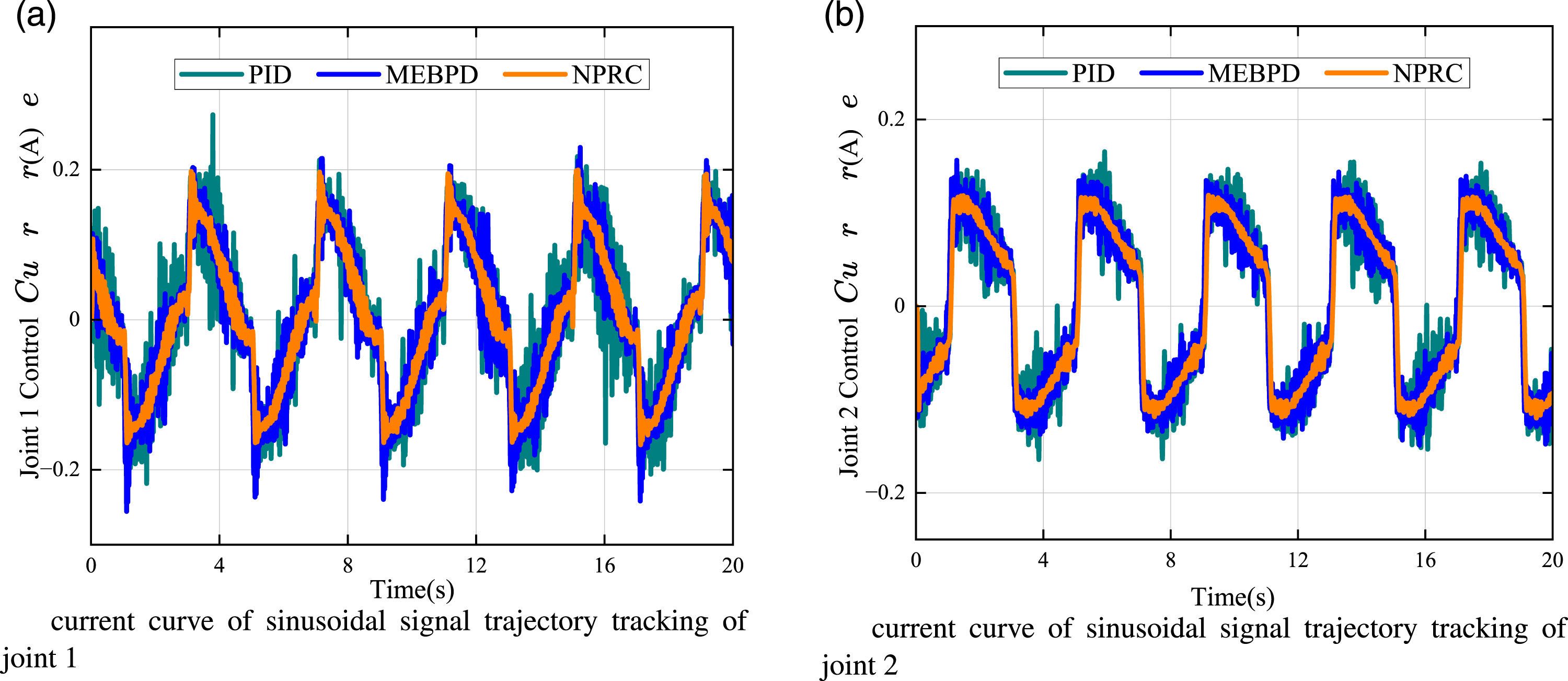
Figures 9(a) and 10(a) indicate joint position curves in the sinusoidal signal tracking experimental. Likewise, the tracked sinusoidal signal can be obtained from equation (51). The tracking performance comparison of different control algorithms can be obtained from the tracking error curves in Figures 9(b) and 10(b). Specifically, the tracking errors of the PID, MEBPD, and NPRC control algorithms are e1 = 0.0578 ∼ 0.0661 deg, e2 = 0.0356 ∼ 0.0382 deg, e1 = 0.0243 ∼ 0.0277 deg, e2 = 0.0088 ∼ 0.0111 deg, and e1 = 0.0029 ∼ 0.0068 deg, e2 = −0.0018 ∼ − 0.0011 deg, respectively. The NPRC control algorithm offers better trajectory tracking performance owing to its smaller tracking error. Figure 11(a) and (b) show the control current curves for joint 1 and joint 2 tracking sinusoidal signals, where the NPRC control algorithm had smaller control current fluctuations than the other control algorithms, especially for Current2. The sinusoidal signal trajectory tracking experimental curves of the joint 1 of the 2-DOF planar robotic arm. The sinusoidal signal trajectory tracking experimental curves of the joint 2 of the 2-DOF planar robotic arm. The sinusoidal signal trajectory tracking experimental control current curves of the two joints of the 2-DOF planar robotic arm.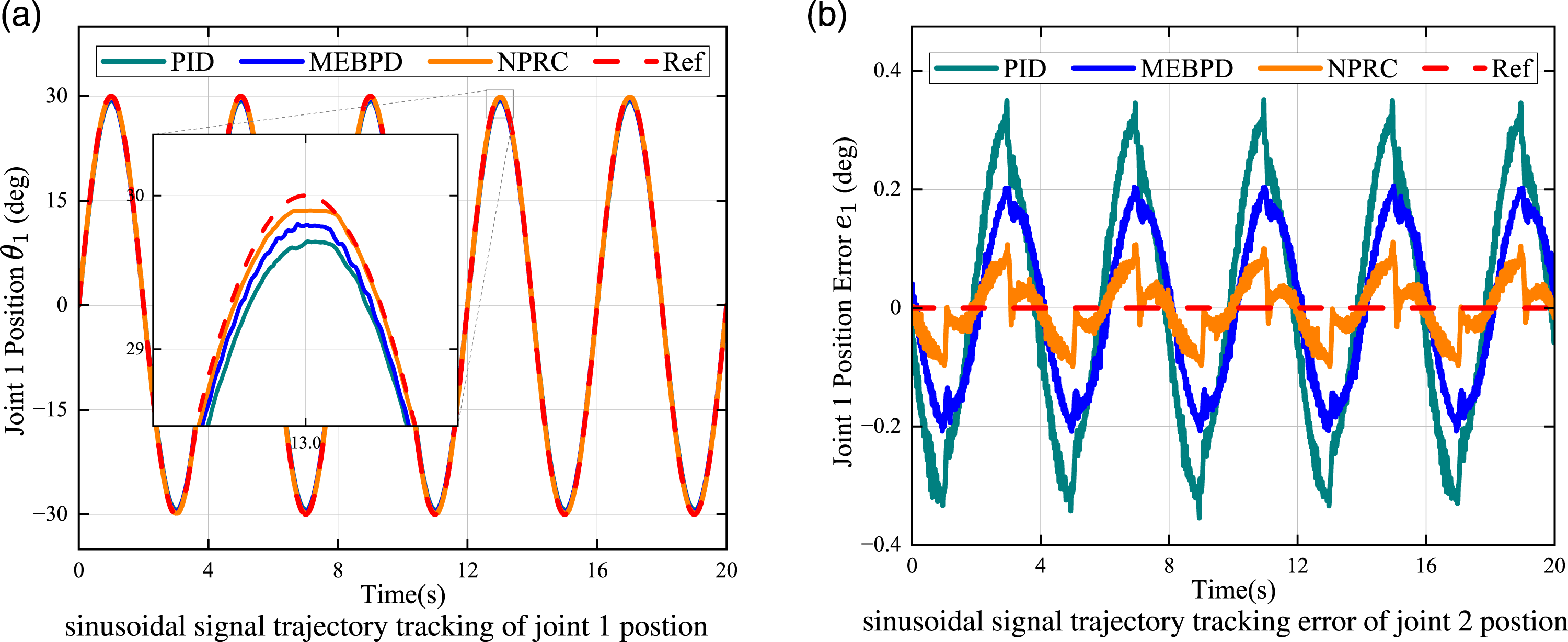
4.4.3. Robustness against the load variation
Changing loads can affect the uncertainty (both structural and parametric) within the robotic arm system indirectly. By installing loads of different masses (0 kg, 0.5 kg, and 1.0 kg) on the end flange of the 2-DOF planar robotic arm and making it follow the desired sinusoidal signals, the robustness of different algorithms to load disturbances is verified. Experimental details of the results can be obtained from the error curves from Figure 12(a)–(f). The vertical comparison shows a reasonable increase in tracking error with increasing load for both joints, with a more significant increase in tracking error for joint 2. The sinusoidal signal trajectory tracking experimental curves of the two joints of the 2-DOF planar robotic arm with different loads.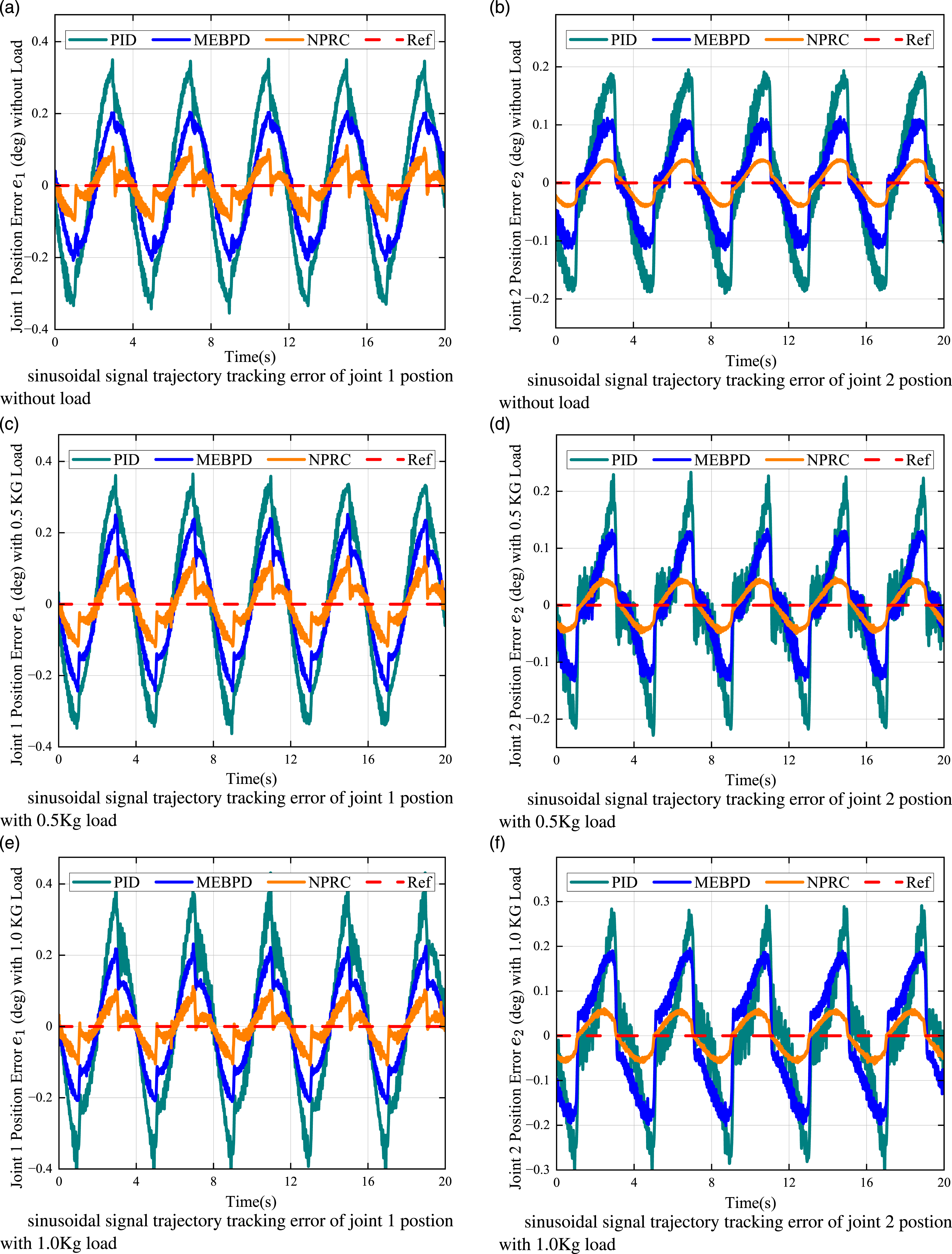

Tracking performance comparison of 2-DOF planar robotic arms under different loads.
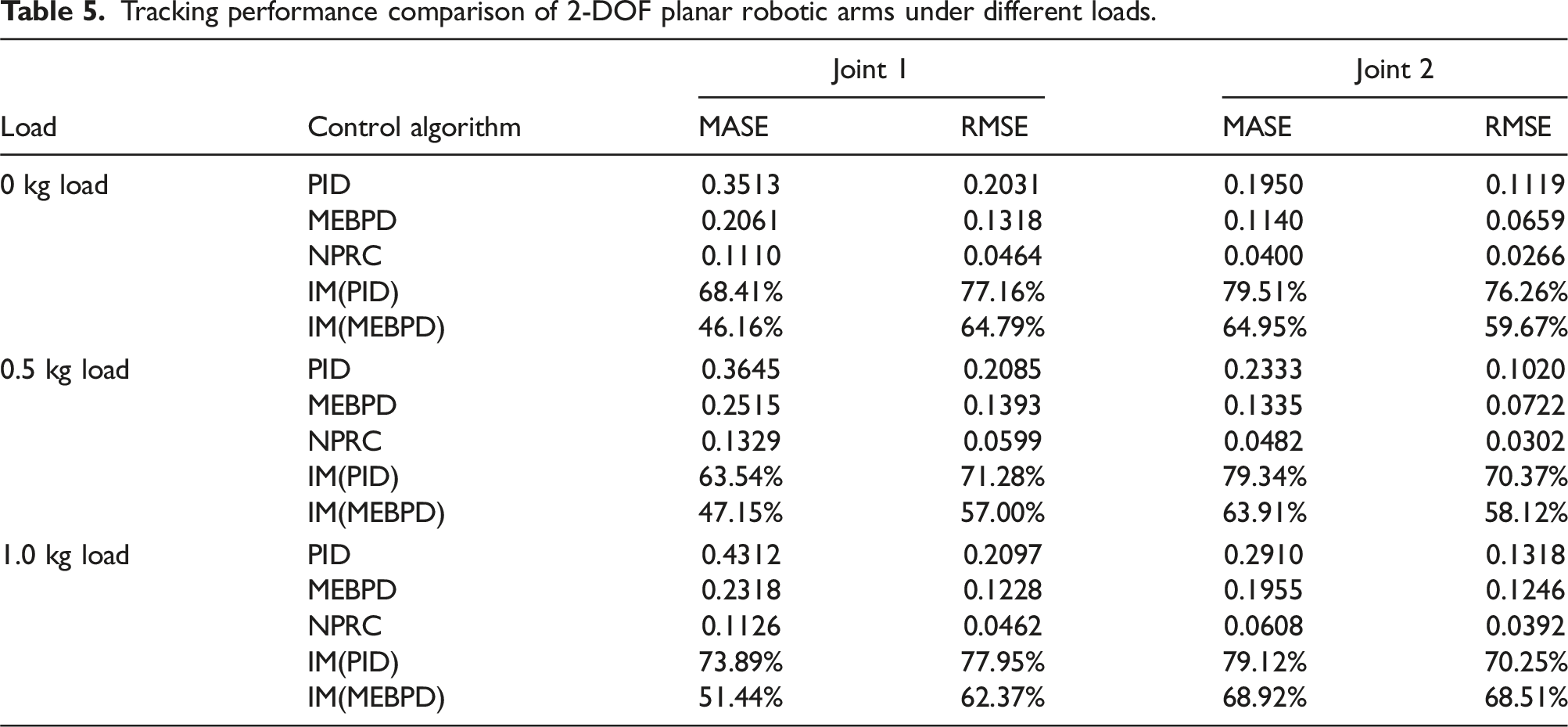
Overall, the NPRC control algorithm provides faster response speed for the 2-DOF planar robotic arm system compared to the experimental PID control algorithm and MEBPD control algorithm, while ensuring better steady-state performance due to the robustness term of the proposed method. The smaller fluctuation in tracking error of the NPRC control algorithm during load variation indicates that the proposed controller has better tracking performance and robustness against uncertainties.
5. Conclusions
This paper proposes a new practical robust control scheme for the robotic arm, and the controller is verified with excellent dynamic performance and robustness through numerical simulations and experiments. The energy-based Lagrangian method is used to model the dynamics of the system, and both Coulomb friction and viscous friction are considered to suppress the reversal chattering. The uncertainties within the system are assumed to be time-varying but bounded, which is represented uniformly by a function. The proposed controller consists of a model- and error-based PD term and an error-based robust term containing the upper bound of the uncertainty term. Further, the Lyapunov minimax approach theoretically proves the proposed controller to guarantee the controlled system with UB and UUB. Based on the 2-DOF planar robotic arm experimental platform, the self-developed rapid controller prototype CSPACE-RT is used to improve the rate of dynamic load and multi-algorithm debugging processes. The proposed controller provided excellent transient, steady-state performance, trajectory tracking capability, and robustness through numerical simulations and experimental results compared with MEBPD and PID control algorithms. We will implement this control algorithm in engineering practice to solve other control problems of time-varying nonlinear systems in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China [Grant No.52305084]; the Key Research and Development Program of AnHui Province [Grant No.2022a05020014]; the Fundamental Research Funds for the Central Universities [Grant No. PA2021KCPY0035]; the University Synergy Innovation Program of Anhui Province [Grant No. GXXT-2021-010]; the Key Laboratory of Construction Hydraulic Robots of Anhui Higher Education Institutes, Tongling University [Grant No. TLXYCHR-O-21ZD01]; and the Pioneer Program Project of Zhejiang Province [Grant No.2022C03018].