
Abstract
This article investigates the fuzzy event-triggered asymptotic tracking control of nonlinear systems with full state constraints. First, to approximate unknown nonlinearity, the fuzzy logic system is employed. Second, the “explosion of complexity” issue is tackled by developing an improved dynamic surface technique. Additionally, a new Barrier Lyapunov function is introduced to make sure state constraints are not violated. Particularly, an efficient dynamic event-triggered control scheme is presented by introducing an auxiliary dynamic variable, which can not only greatly save communication resources but also achieve asymptotic tracking. Ultimately, validations are illustrated through two simulation examples.
Keywords
1. Introduction
With the prevalence of nonlinear control systems in practical engineering, the stabilization and tracking control of such systems has become a prominent field of research. For nonlinear systems (NSs) with uncertain parameters, Zhang et al. (2015) proposed an adaptive control algorithm by using the robust technique. For uncertain NSs Zhou et al. (2006), the challenge of unknown dead-zone nonlinearities was addressed by using smooth inverse functions. For the case of unknown actuator nonlinearities and bounded disturbances, the tracking problem was studied for NSs in Zhang et al. (2014). Noted that the above results become invalid when the nonlinear functions cannot be linearly parameterized or are completely unknown. To overcome the above difficulties, Wang and Mendel (1992) first proposed the notion of fuzzy basis function and applied it to approximate unknown nonlinearities of systems. Recently, numerous meaningful results were proposed by combining backstepping technology with fuzzy logic system (FLS) (Li et al. (2019a); Xu et al. (2023); Wang et al. (2021); Tong et al. (2020); Deng et al. (2024); Yao et al. (2023); Sun and Li (2023)). However, it should be emphasized that as the system order grows, the derivation of controller becomes complicated. In traditional backstepping-based design, the implementations often frequently encounter the issue of “explosion of complexity,” which arises from the repetitive differentiation of virtual controllers.
Subsequently, the adaptive dynamic surface control (DSC) was first introduced in Swaroop et al. (1997), which was recognized as an efficient tool to overcome the above difficulties. In Ma and Ma (2020), the controller was designed for NSs based on adaptive DSC. To alleviate the effects of filter performance on closed-loop stability, a modified neural DSC method was introduced in Sun et al. (2015). Furthermore, the DSC technique by using FLS for NSs were presented in Liu et al. (2023); Hu and Liu (2023); Wang and Wang (2014). Although some important works have been done with the DSC technique, the above literature is limited to bounded tracking. In order to overcome the aforementioned deficiency, a novel state-feedback controller was designed by utilizing DSC scheme in Liu (2018), where the asymptotic tracking was realized. Nevertheless, the method in Liu (2018) is available when the control coefficients of the system are known. Thus, further research is needed to build a DSC strategy for NSs with unknown virtual control coefficients (UVCC) that can accomplish asymptotic tracking.
In real-world applications, the controller always needs to maintain certain performance indicators, which requires that system states can only change in a specific boundary. Otherwise, violating state constraints may degrade system performance. To solve this problem, Tee et al. (2009) first introduced the Barrier Lyapunov function (BLF) to resolve output constraints for the first time. Since then, as a tool that can effectively avoid violating state constraints, BLF has attracted extensive research attention. Based on BLF, Sun et al. (2018) investigated full state constraints for stochastic switched system. Inspired by the early works Sun et al. (2018) and Tee et al. (2009), the tangent barrier Lyapunov function (BLF-Tans) was adopted to ensure each state were not exceed the boundary for switched NSs in Liu et al. (2022). Abundant results on state constraints control for NS have been made in Song et al. (2023); Li et al. (2019b, 2022); Wu et al. (2023); Liu et al. (2021). Note that the controllers in the above control frameworks adopted time-sampling.
In practical engineering, it is essential to consider two significant factors: control energy consumption and communication load. Event-triggered control (ETC) strategy as an alternative way has appeared, which mitigates unnecessary transmission. Motivated by this fact, for nonlinear continuous-time systems, adaptive ETC strategy was studied in Li and Yang (2017). A novel saturated ETC scheme was presented avoid continuous communication in Wang et al. (2023) for constrained NSs. Although significant progress has been made, it is worth noting that numerous ETC results on uncertain strict-feedback NSs adopt static event conditions. Recently, there has been a growing interest in dynamic ETC methods across different fields (Xing and Wen (2023); Cao et al. (2024, 2022); Ge et al. (2020); Xia et al. (2023)). Compared to static ETC control, dynamic ETC approaches tend to yield larger average inter-event intervals. However, there are relatively few dynamic ETC results for strict-feedback uncertain NSs, and most of current researches mainly concentrates on bounded-error tracking. Motivated by the above perspectives, a dynamic ETC-based asymptotic tracking algorithm for nonlinear constrained systems with UVCC is presented. The contributions are summarized as (i) Unlike Liu (2018), where the states were unconstrained and only bounded tracking errors were attained. In this paper, a novel BLF is devised by incorporating the lower bound of the UVCC to satisfy full state constraints. Meanwhile, the developed controller developed can also realize asymptotic tracking by utilizing backstepping approach and DSC technique. (ii) In contrast to the triggering function with a constant term discussed in Wang et al. (2023), which only leads to a bounded tracking error, this work introduces an auxiliary dynamic variable that ensures a zero tracking error. Furthermore, unlike the time-triggered control results in Li et al. (2019a); Jin and Li (2021) where the data transmitted periodically with the fixed sampling period, the presented dynamic ETC scheme updates the states and control laws by using only the triggered samples, thereby significantly reducing the communication resources required. (iii) Different from Liu (2018), we design a new first-order filter for nonlinear constrained system with UVCC in this paper, which can not only tackle the “explosion of complexity” issue, but also offset the influence of boundary layer error.
2. Problem statement and preliminaries
2.1. Problem formulation
Consider nonlinear strict-feedback systems as follows
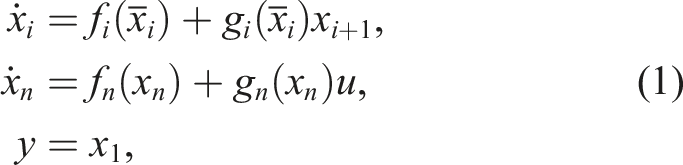
2.1.1. Control objective
Construct a dynamic ETC tracking control method for (1) to ensure the boundedness of each signal and the state constraints are not broken, while asymptotic tracking can be achieved.
The desired trajectory y
d
(t) and its derivatives
The sign of g
i
is known. There exists unknown constant
Zhang et al. (2024): For any variable

Polycarpou and Weaver (1995): There are bounded and positive continuous function ɛ and κ ∈ R, which satisfy

Xu et al. (2023): There exists continuous function f(X) and positive constant ϱ, under the ideal constant weights, for all X ∈ Ω
X
satisfy

3. Controller design and stability analysis
3.1. Controller design

We choose the symmetric BLF candidate V1 as

The derivative of V1 is

To avoid “explosion of complexity,” a novel filter virtual controller


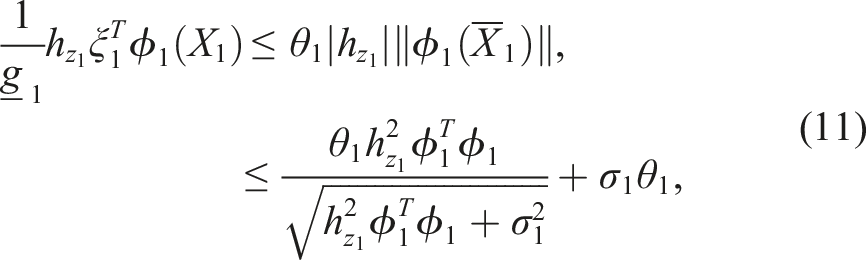
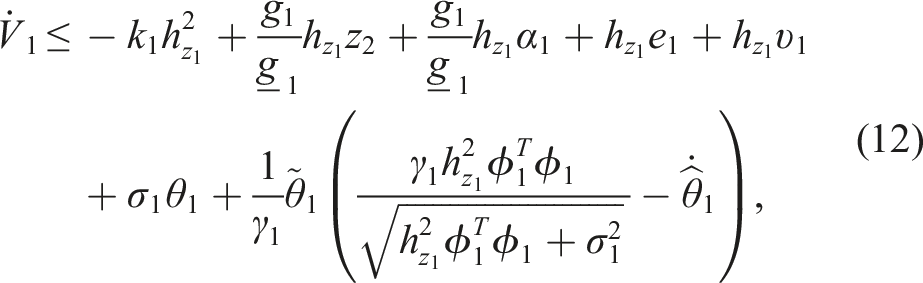
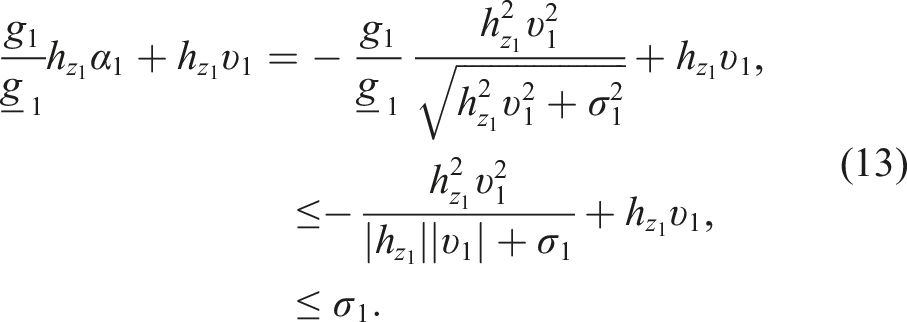
Unlike the traditional adaptive backstepping technique, the advantage of DSC scheme is that the filtered signal Since H1 includes unknown functions, the FLS is employed to approximate H1 Then, we define Based on (10) and (11), (7) becomes It is apparent that Construct the virtual controller and update law as By substituting (13)–(15) into (12), one can get Constructing the symmetric BLF candidate V
i
as Then, we arrive at Similar to (10) and (11), one has Design the virtual controller and update law as Refer to step 1, it is clear that Design the symmetric BLF V
n
as Similar to step i, repeat the above steps, it yields Introduce the dynamic variable η in the following The virtual controller and update law are chosen as Substituting (30)–(32) into (26), refer to step 1, it is clear that













It should be emphasized that the nonlinear filter in Liu (2018) contains control coefficients, therefore, it will be invalid for the nonlinear system with UVCC. Thus, a new nonlinear filter is designed in this paper, which can overcome the above limitation. Moreover, the term
3.2. Stability analysis
Given the system (1), under Assumption 1–2, for any initial condition V (0) ≤ p, p > 0 is a constant, and if ρ satisfies ρ > 1 − ξ/β, then the proposed control strategy can realize asymptotic tracking. In addition, all states are constrained and the Zeno behavior will be avoided.
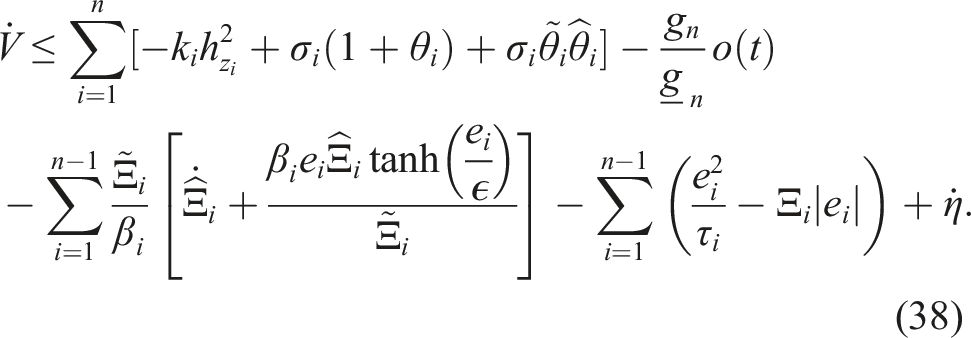
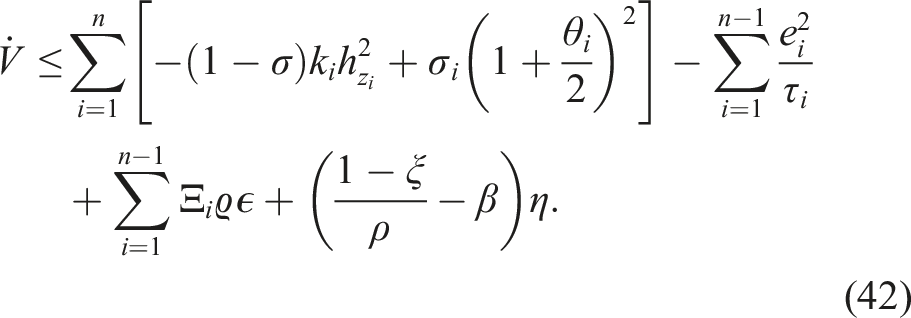
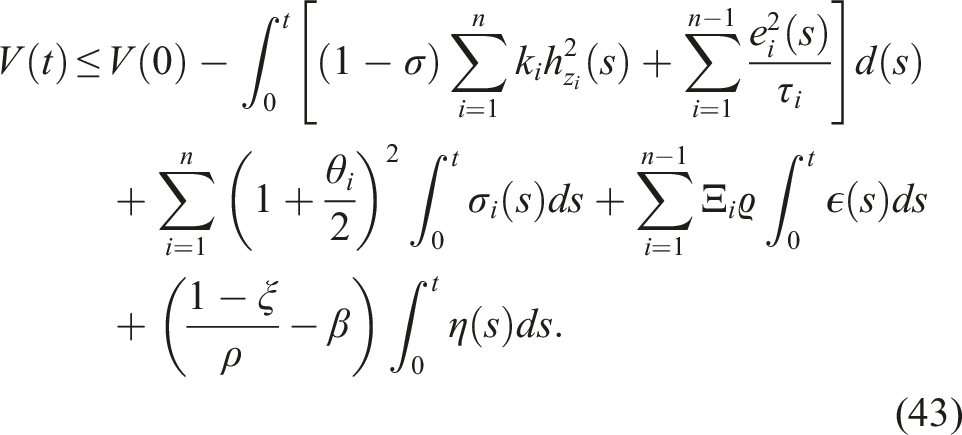
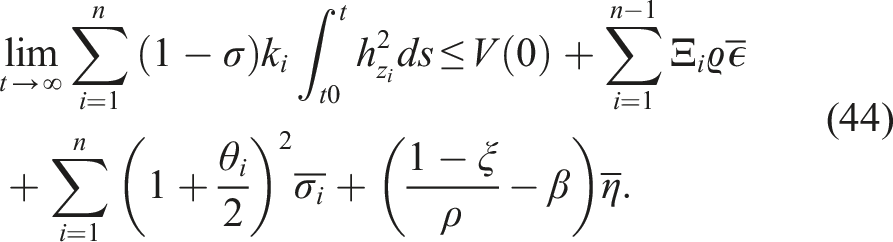
Describe compact sets The derivative of From (27) and (29), we can obtain The symmetric BLF candidate V can be constructed as Differentiating V yields Construct the update law as From Lemma 2, one can deduced that In accordance to Putting (39)–(41) into (38), and by (29), there holds Integrating (42) over [0, t] obtains From (43), we can obtain the boundness of V
n
(t) on [0, + ∞), which means From the boundedness of Next, the exclusion of Zeno behavior will be provided. Based on o (t) = ω (t) − u (t), it can derive that As Let As t ∈ [t
k
, tk+1) ∈ [0, T], one has Thus, the Zeno behavior is removed.












In this article, we design an adaptive dynamic ETC algorithm for nonlinear constrained system. We have mainly achieved the following control objectives: (1) the asymptotic tracking is realized; (2) all states are constrained within a compact set; (3) communication resources can be greatly conserved and the Zeno behavior does not exist; (4) the “explosion of complexity” problem is solved.
4. Simulation example
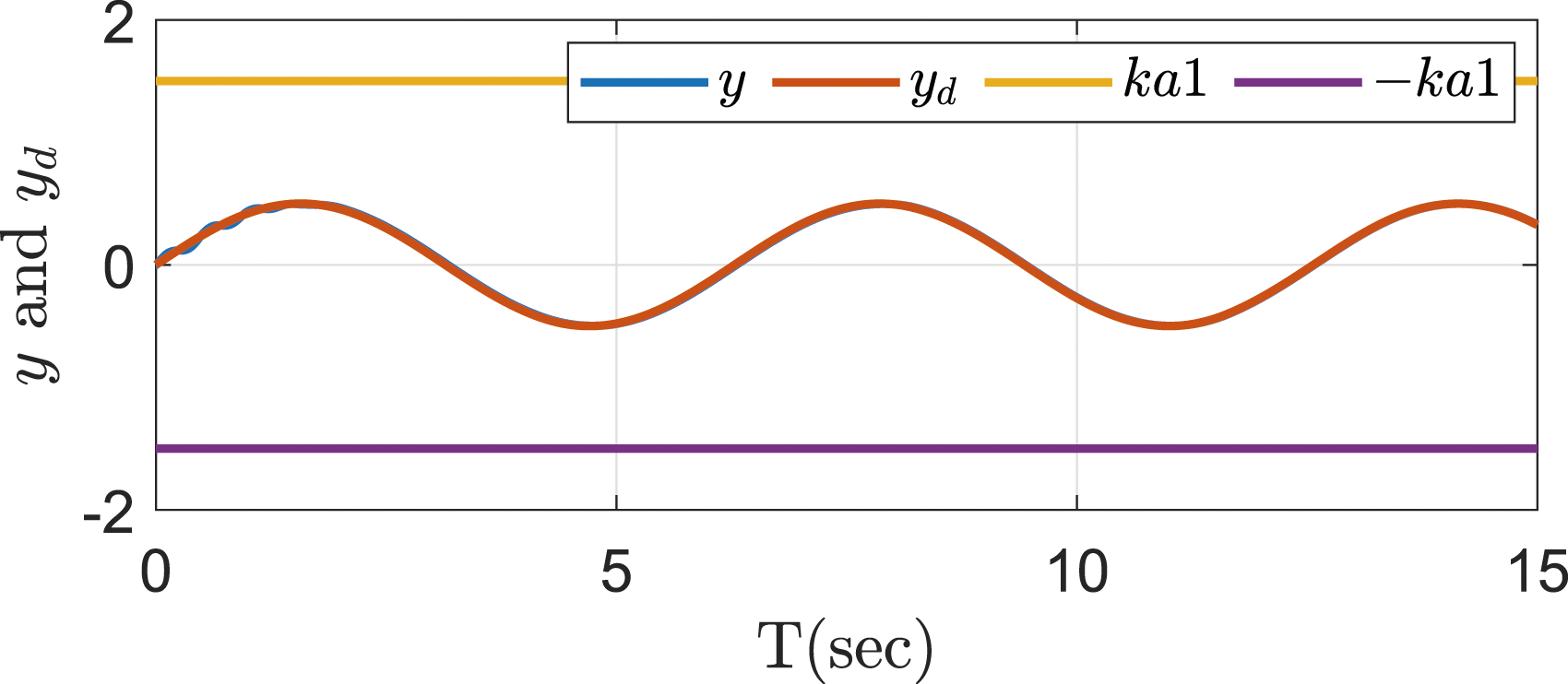
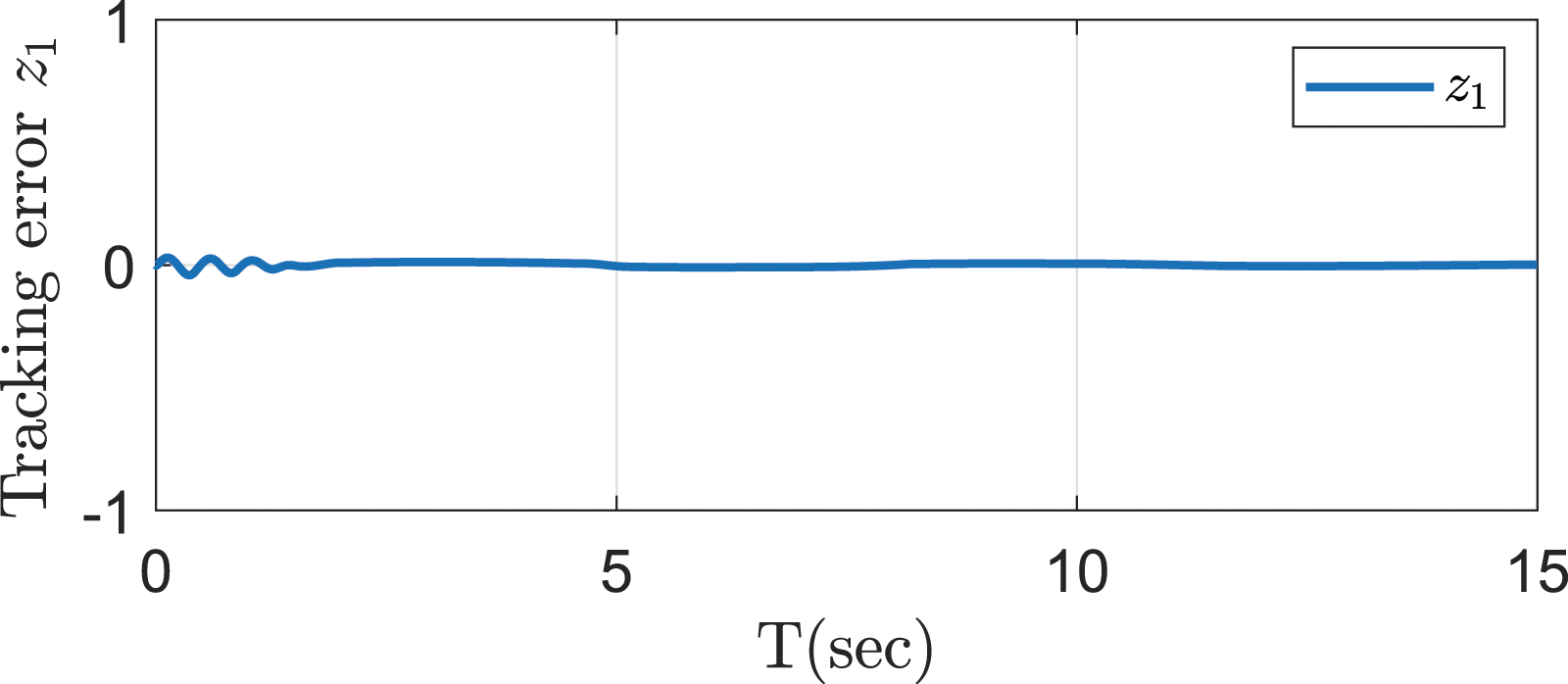
Select the values of parameters as k1 = 40, k2 = 40, γ1 = 15, γ2 = 5, β1 = 1, τ1 = 0.3, Figures 1–6 reveal the simulation results. From Figures 1 and 2, the controller can achieve asymptotic tracking. The curves of x2 is plotted in Figure 3. We can see from Figures 1 and 3 that full state constraints are not broken. In Figure 4, the input u is presented. Figure 5 presents that the adaptive parameters

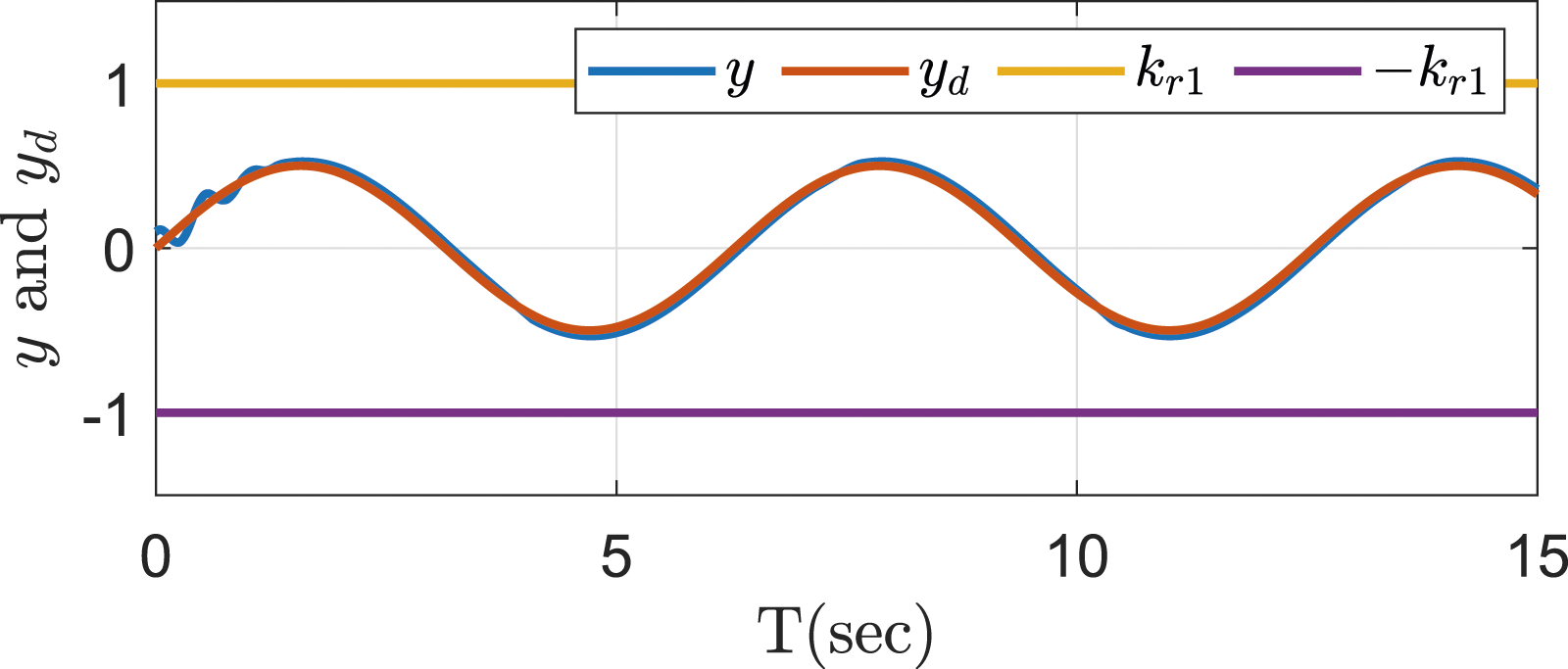
Tracking trajectory: y (t) and y d (t).
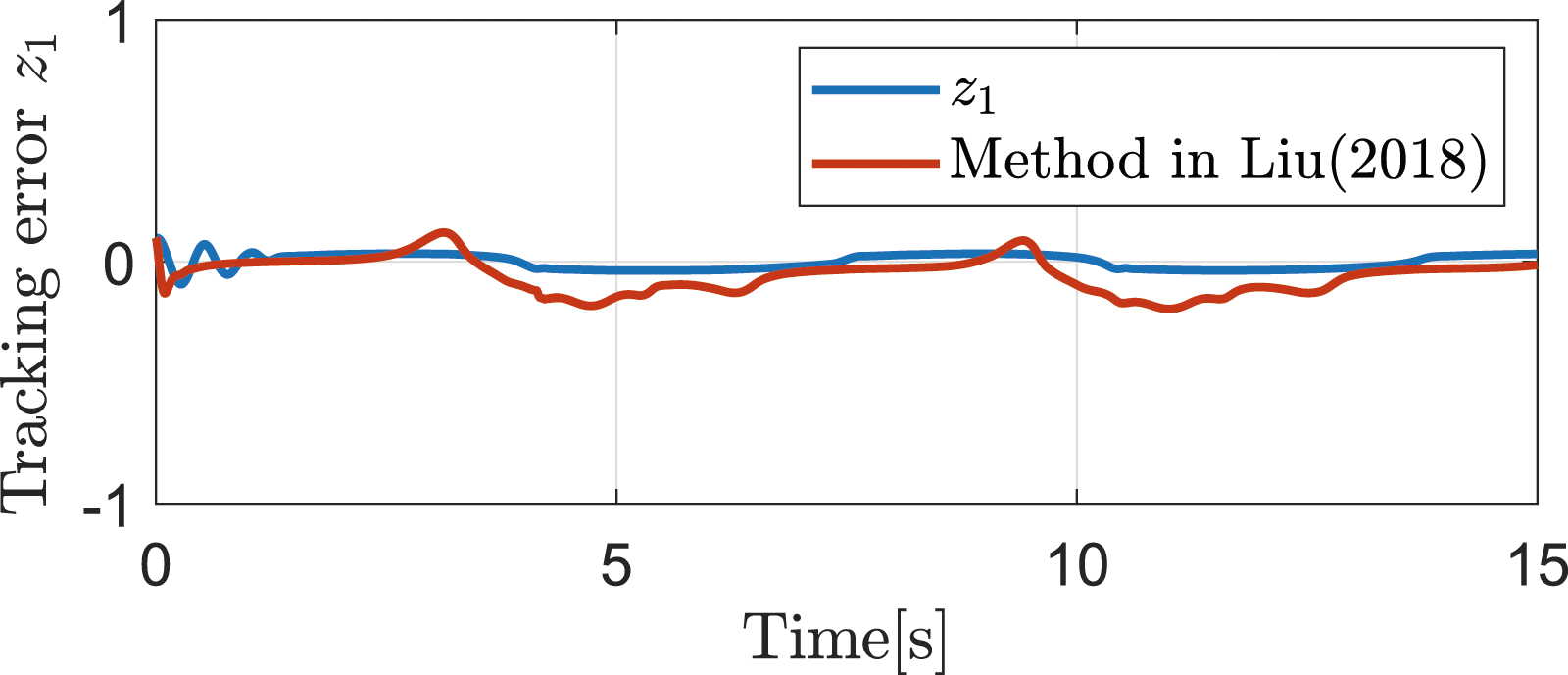
Tracking errors: y − y d .
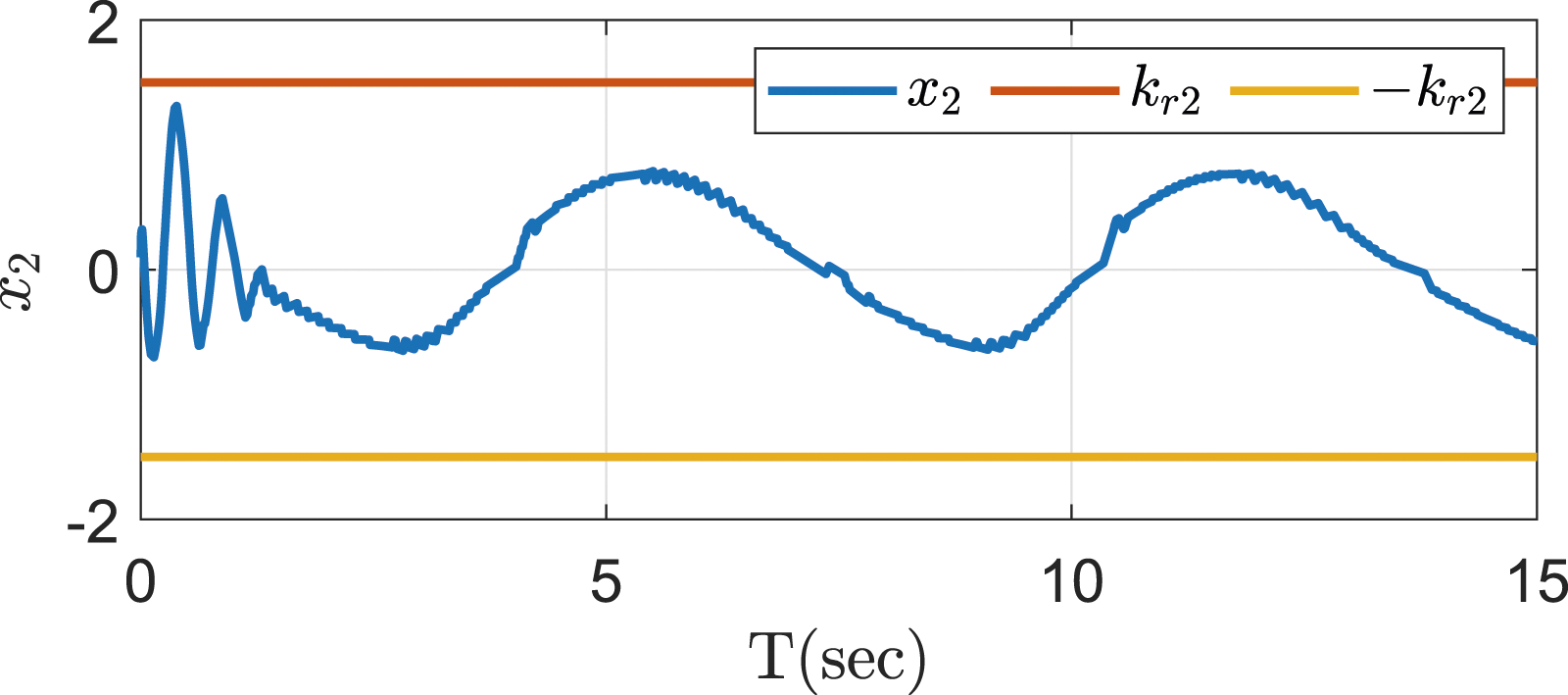
State trajectories:x2.
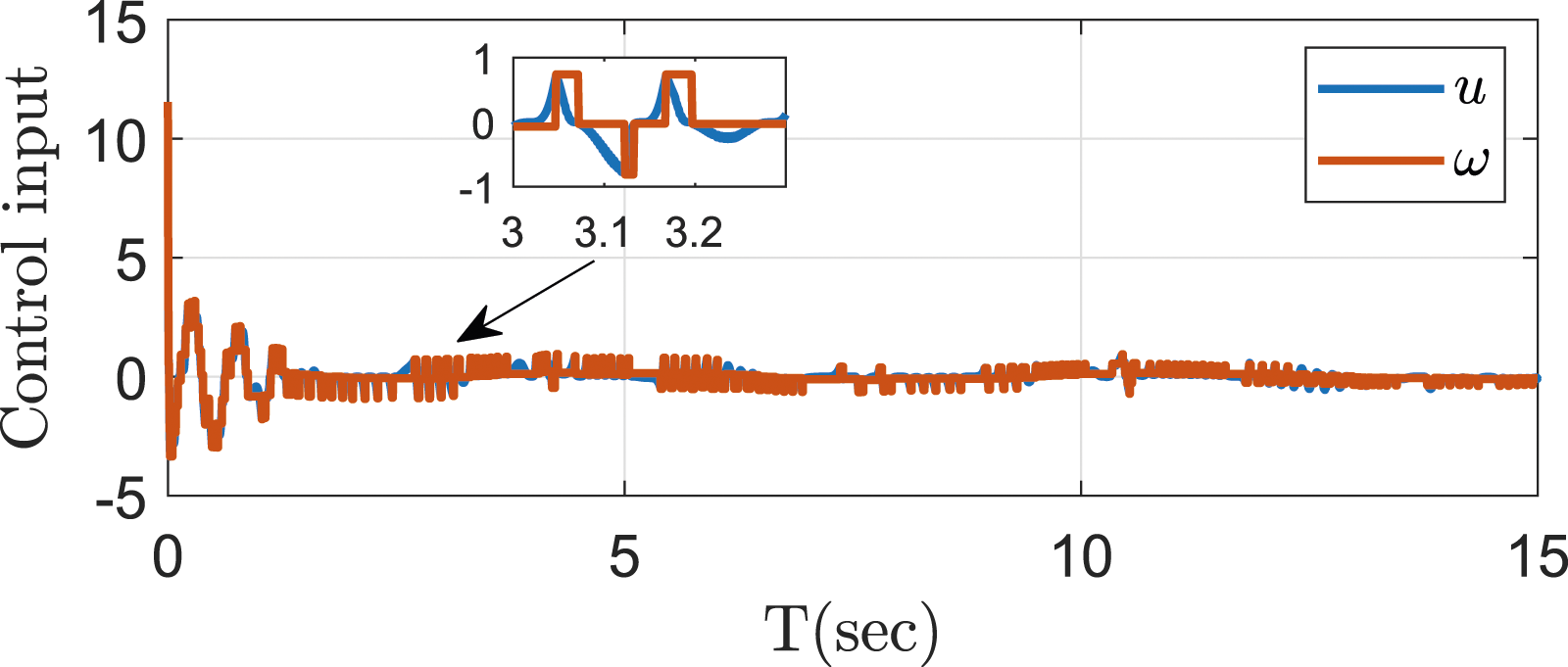
Control input: u.
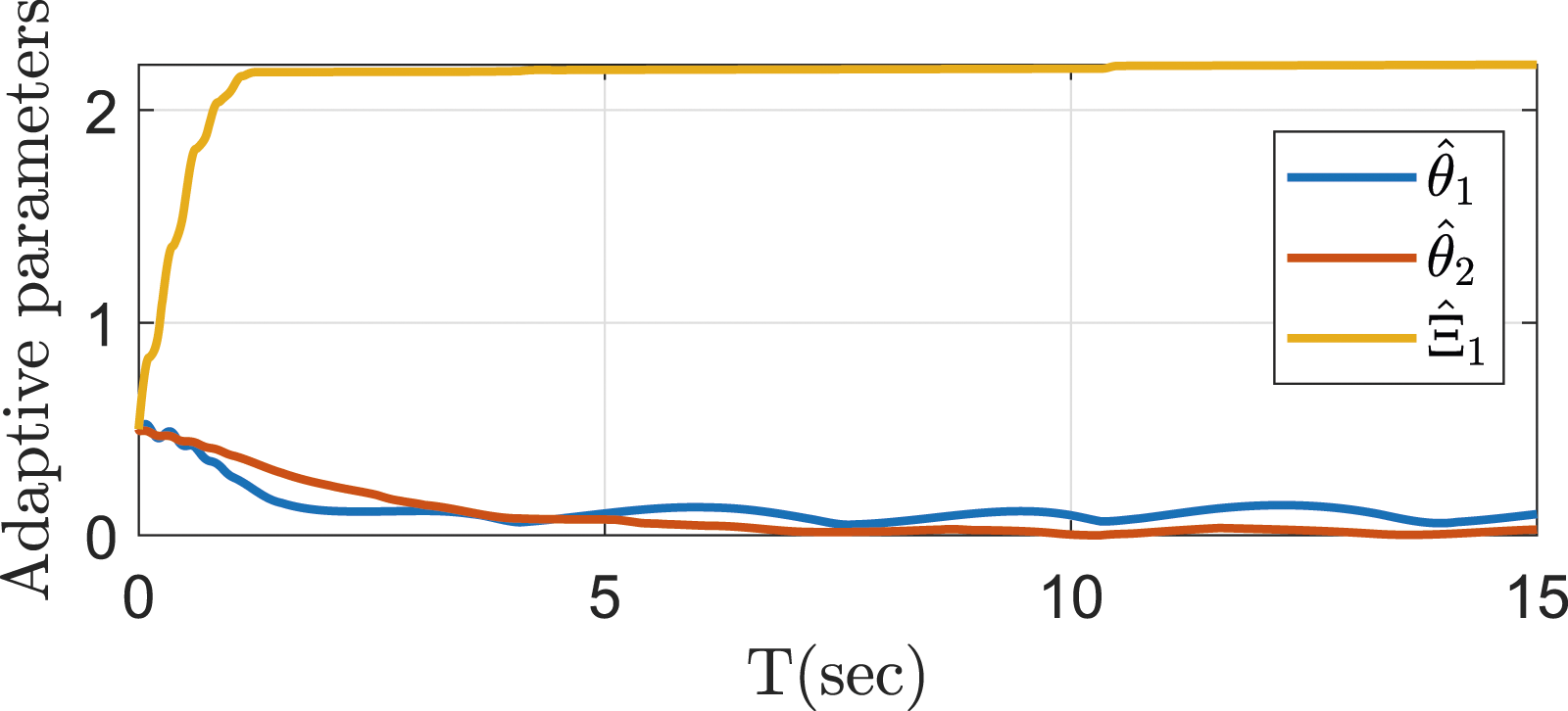
Adaptive parameters.
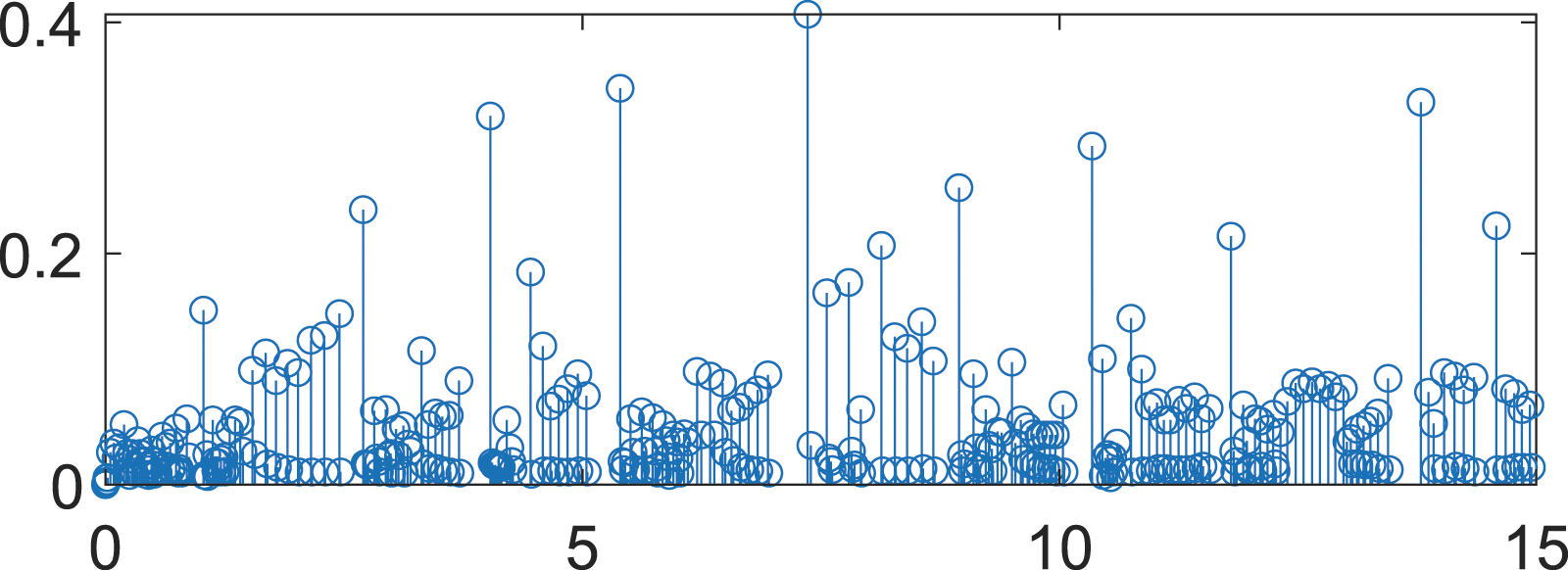
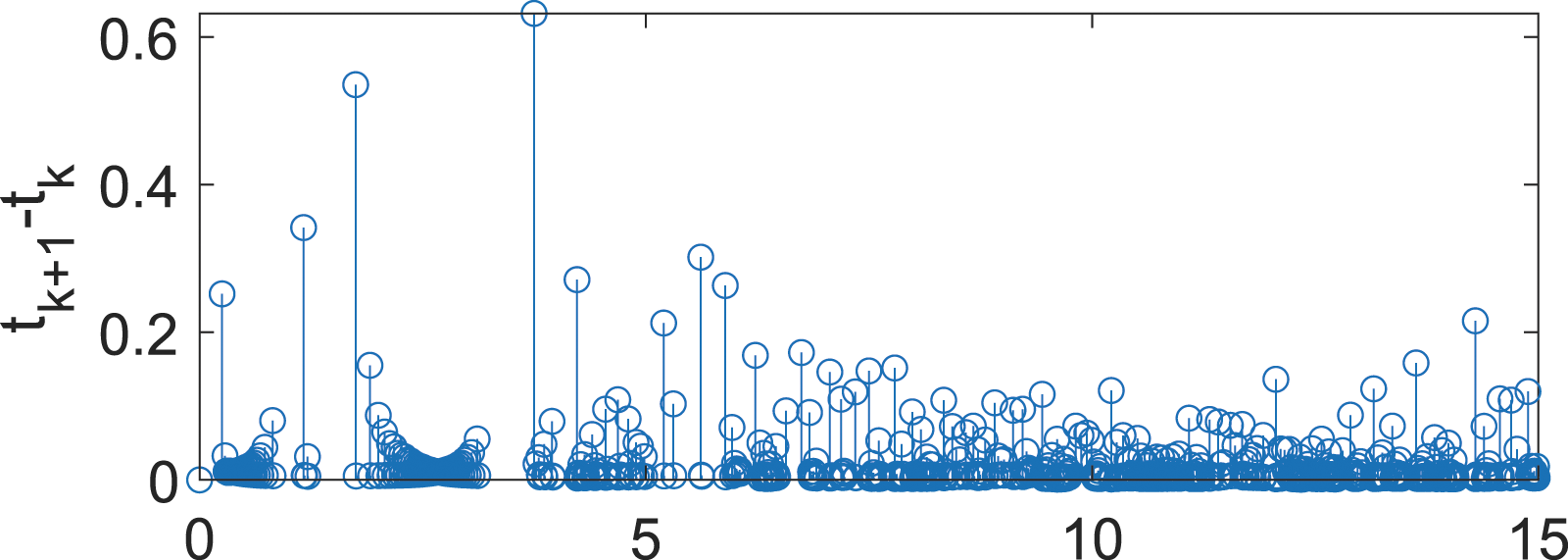
Time interval of triggering events.
The system dynamic is expressed as shown below In this simulation, select the initial values as k1 = 80, k2 = 80, γ1 = 15, γ2 = 9, β1 = 0.5, τ1 = 0.5, We can see from Figures 7 and 8 that the designed control scheme can achieve asymptotic tracking. The curve of state variable x2 is shown in Figure 9. Figure 10 exhibits that the adaptive parameters


Tracking trajectory: y (t) and y d (t).
Tracking errors: y − y d .
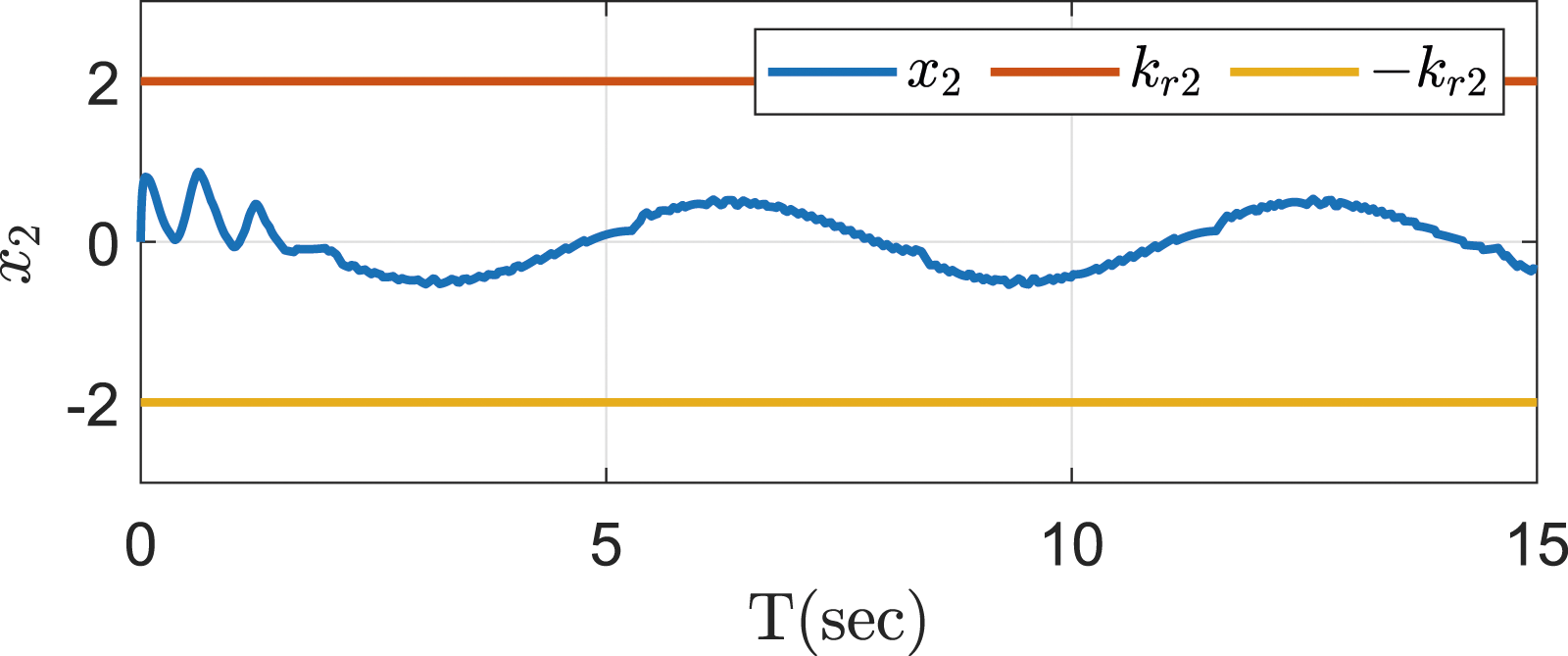
State trajectories:x2.
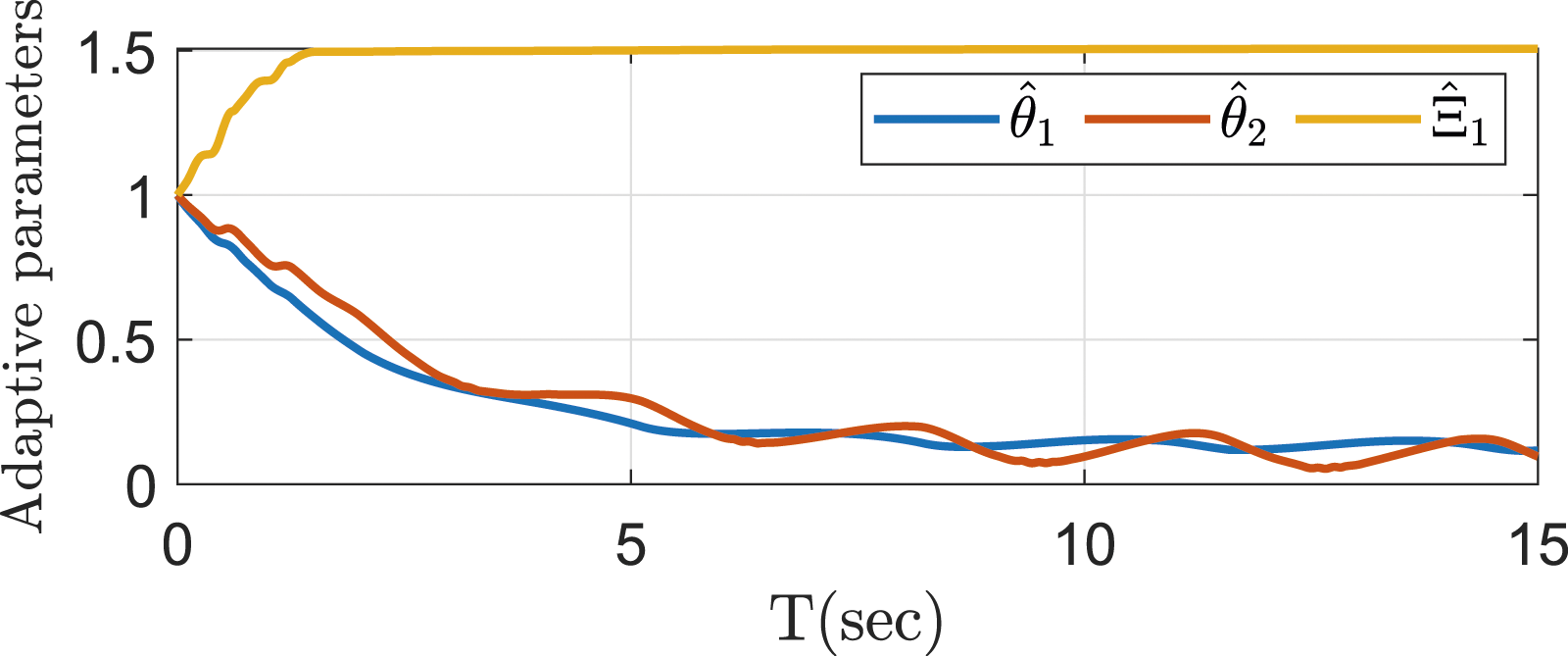
Adaptive parameters.
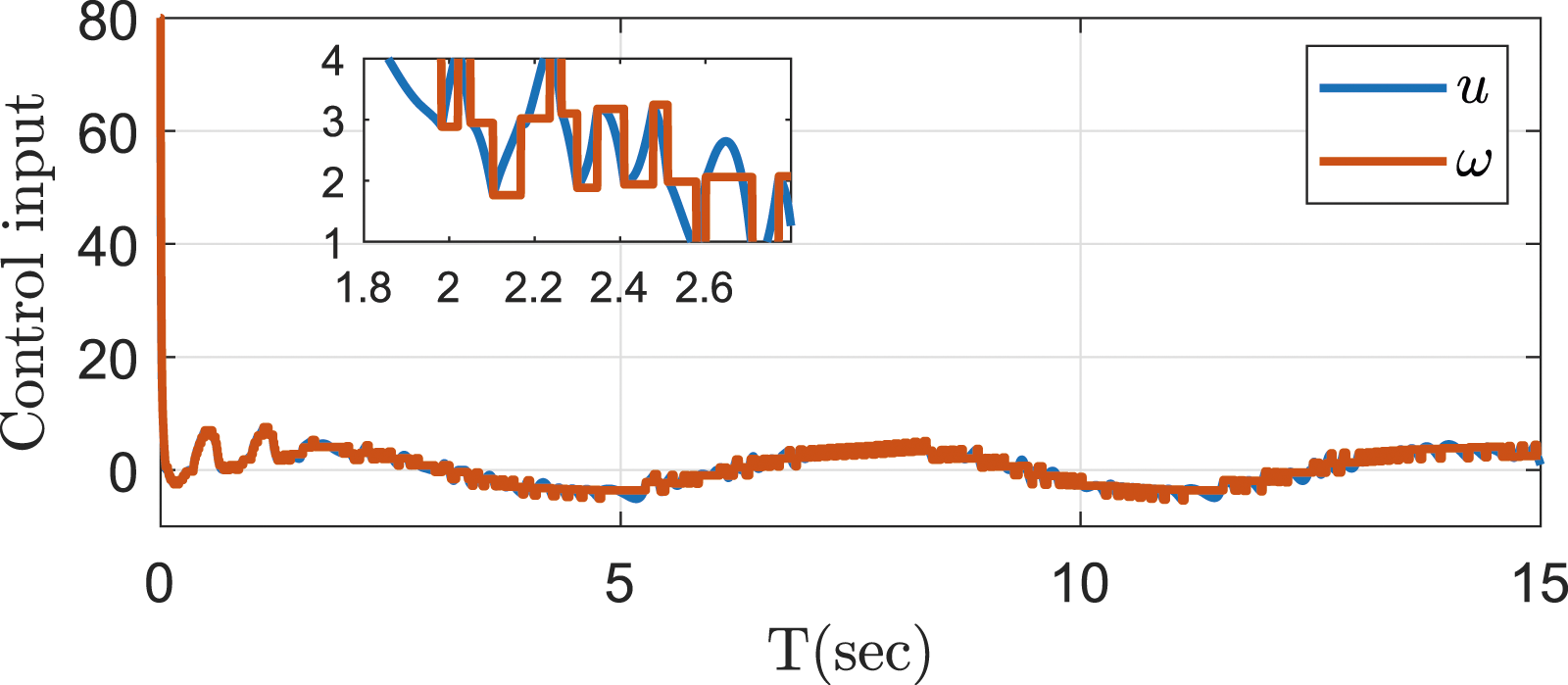
Control input: u.
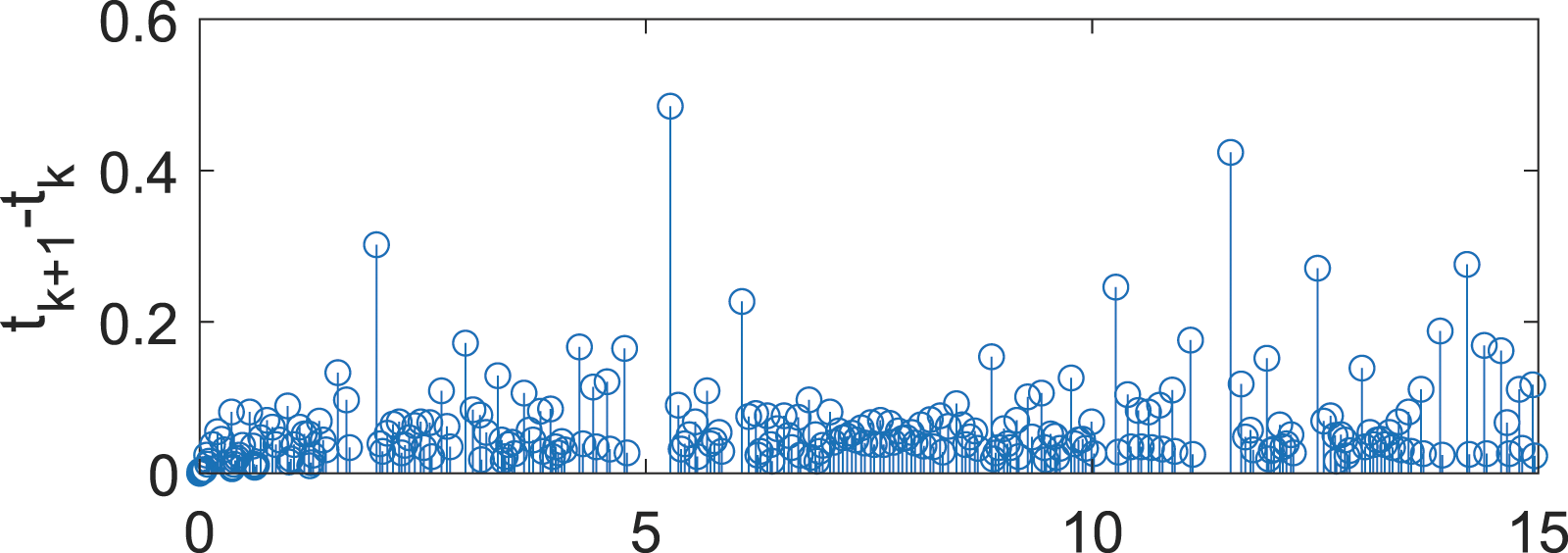
Time interval of triggering events.
Time interval of triggering events in.
5. Conclusions
This paper puts forward a dynamic event-based asymptotic tracking control algorithm for UNSs. Specifically, the fuzzy adaptive DSC method can tackle the calculating explosion problem. By incorporating the lower bound of the UVCC, the new BLF is important to obtain asymptotic tracking and guarantees full state constraints are not violated. Moreover, an efficient dynamic ETC scheme is presented by introducing an auxiliary dynamic variable, and the Zeno phenomenon is perfectly avoided. The feasibility of the developed method is proven in simulation results.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Funds of National Science of China (Grant 62373176 and Grant No. 61973146), in part by the Applied Basic Research Program in Liaoning Province (No. 2022JH2/101300276); and in part by the Key Project of the Educational Department of Liaoning Province (Grant No. JYTZD2023084).