
Abstract
This study introduces a method to establish the dynamic model of a parallel robot using screw theory and the d’Alembert-Lagrange equation. Based on this model, a robust sliding mode control strategy utilizing hyperbolic convergence laws is proposed. The d’Alembert-Lagrange equation and screw theory are employed to construct a concise dynamic equation for the parallel robot, making it more suitable for control applications. Additionally, a formula for directly calculating the inertial wrench is presented. To achieve precise control, a sliding mode control strategy with double hyperbolic convergence law is implemented to ensure chattering-free performance. A novel double hyperbolic convergence law disturbance observer is designed to estimate unmodeled dynamics and uncertain disturbances, enhancing the system’s robustness. The control strategy is validated through numerical simulations, demonstrating significant improvements in chattering-free performance, tracking accuracy, and tracking speed.
Keywords
1. Introduction
In the rapidly evolving fields of automation and intelligent manufacturing, parallel robots—a high-performance mechanical system—are gaining prominence due to their unique advantages and broad application prospects. These robots feature multiple closed-loop motion links, providing them with high rigidity, accuracy, and dynamic response (Dong et al., 2021; Gosselin, 1995; Merlet, 2005). In particular, they excel in specific tasks, particularly in scenarios demanding high speed, load capacity, and repetitive positioning accuracy.
Parallel robots commonly operate at high speeds, posing a critical challenge: achieving precise control (Wu et al., 2021). High-precision motion control is inherently demanding (Li and Wu, 2004). Firstly, the inherent structure of parallel robots results in strong coupling between their kinematics and dynamics (Cheng et al., 2022). Modeling the nonlinear dynamics of parallel robots presents considerable difficulty (Abo-Shanab, 2020). Secondly, accounting comprehensively for time-varying perturbations and unmodeled dynamics remains elusive, hindering the attainment of sufficient control accuracy.
Traditionally, researchers have employed several methods to analyze the dynamics of parallel robots, including the Newton-Euler method (Do and Yang, 1988), Lagrange method (Asker et al., 2014), and the virtual work principle (Tsai, 1999a). Additionally, some scholars have used bond graph theory (Bidard, 1993; Guo et al., 2015) to construct the multi-energy domain dynamics model of parallel robots. Newton-Euler method as a classical mechanics method, there is a need for multiple iterations and the existence of a large number of intermediate forces, which is too cumbersome for the dynamics solution of the control model. In addition to the Newton-Euler method, the rest of the Lagrange method, the method of the principle of virtual work, and the bonding diagram method are all energy-based methods, which are more suitable for the construction of the complex multi-body dynamics model. The screw theory is an effective tool to study the dynamics of space bodies (An et al., 2017; Chen et al., 2017; Cibicik and Egeland, 2019); Bidrard proposed the concept of screw bond graph in 1993 (Bidard, 1993), Guo et al. (2015) successfully applied the screw bond graph to the dynamics of parallel robots; Gallardo and Cheng combined the screw theory and the virtual work principle of dynamics to study the dynamics of manipulators (Cheng et al., 2022; Gallardo et al., 2003; Gallardo-Alvarado et al., 2008, 2018). In general, a spatial mechanism has six degrees of freedom, and the Plücker coordinates of the screw also have six variables (Qiu et al., 2021). This correspondence is advantageous for constructing a simpler and more concise process for solving dynamics.
Traditional computational torque control is effective when the robot’s dynamics are fully and accurately modeled. However, its control accuracy significantly degrades in the presence of large unmodeled dynamics and disturbances (Kardos, 2019; Xiao et al., 2024). Feedforward PD control partially mitigates disturbances but relies on high modeling accuracy. Neural network techniques can enhance the robustness of parallel robotic systems by identifying and compensating for uncertainties, but this approach demands extensive training data, computational resources, and cost, and lacks explicit stability proofs (Nguyen and Cheah, 2022). Sliding mode control, which employs a nonlinear switching function, quickly steers the system state toward the desired sliding surface even in the presence of perturbations, demonstrating robustness (Li et al., 2022). Although sliding mode control effectively handles unmodeled dynamic perturbations, the issue of high-frequency jitter in traditional sliding mode control limits its practical applicability (Levant, 1993).
In this paper, we construct a dynamics model for a robot using screw theory and the d’Alembert-Lagrange equations. Based on this model, we investigate a sliding mode control strategy for parallel robots employing hyperbolic convergence law. The paper introduces an innovative approach in two key areas. First, it presents a concise formula for directly calculating spatial inertia force using screw notation. This simplifies the calculation process and enables a concise and unified kinematics-to-dynamics modeling using screw. Secondly, we design a novel high-precision, vibration-free sliding-mode controller for parallel robots. Additionally, a sliding-mode disturbance observer is developed to address high-frequency vibration issues. The observer enhances system robustness by compensating for uncertainty. The paper proceeds as follows: In Section 2, we establish the full Jacobi matrix of the parallel robot using the dual space and closed-loop vector method. In Section 3, we construct the robot dynamics model using screw theory and the d’Alembert-Lagrange equations. We introduce a formula for calculating the inertial wrench related to the moving platform. Section 4 details the design of a combined hyperbolic convergence law sliding-mode controller (HCLSMC) and an expanded sliding-mode observer for the parallel robot control strategy. In Section 5, we simulate and verify the controller’s advantages in terms of accuracy, tracking speed, chattering-free control, and interference immunity. Finally, Section 6 presents the paper’s conclusions.
2. Kinematic modeling
2.1. Kinematic inverse solution
Kinematic analysis forms the fundamental groundwork for parallel robots. It serves as the foundation for velocity, acceleration, force, and dynamics analyses. This paper focuses on studying the robust control algorithm for parallel robots. Consequently, we establish only the inverse kinematics model for the parallel robot. Unlike tandem robots, the inverse kinematics of parallel robots are relatively straightforward to construct. We compute the inverse kinematics using the traditional closed-loop vector method, which efficiently relates the working end position to the driving position.
For the 3UPS/PU parallel robot shown in Figure 1, the Hook hinge node between the bottom base and the side chain i is marked as A
i
, the ball hinge on the side chain i is marked as B
i
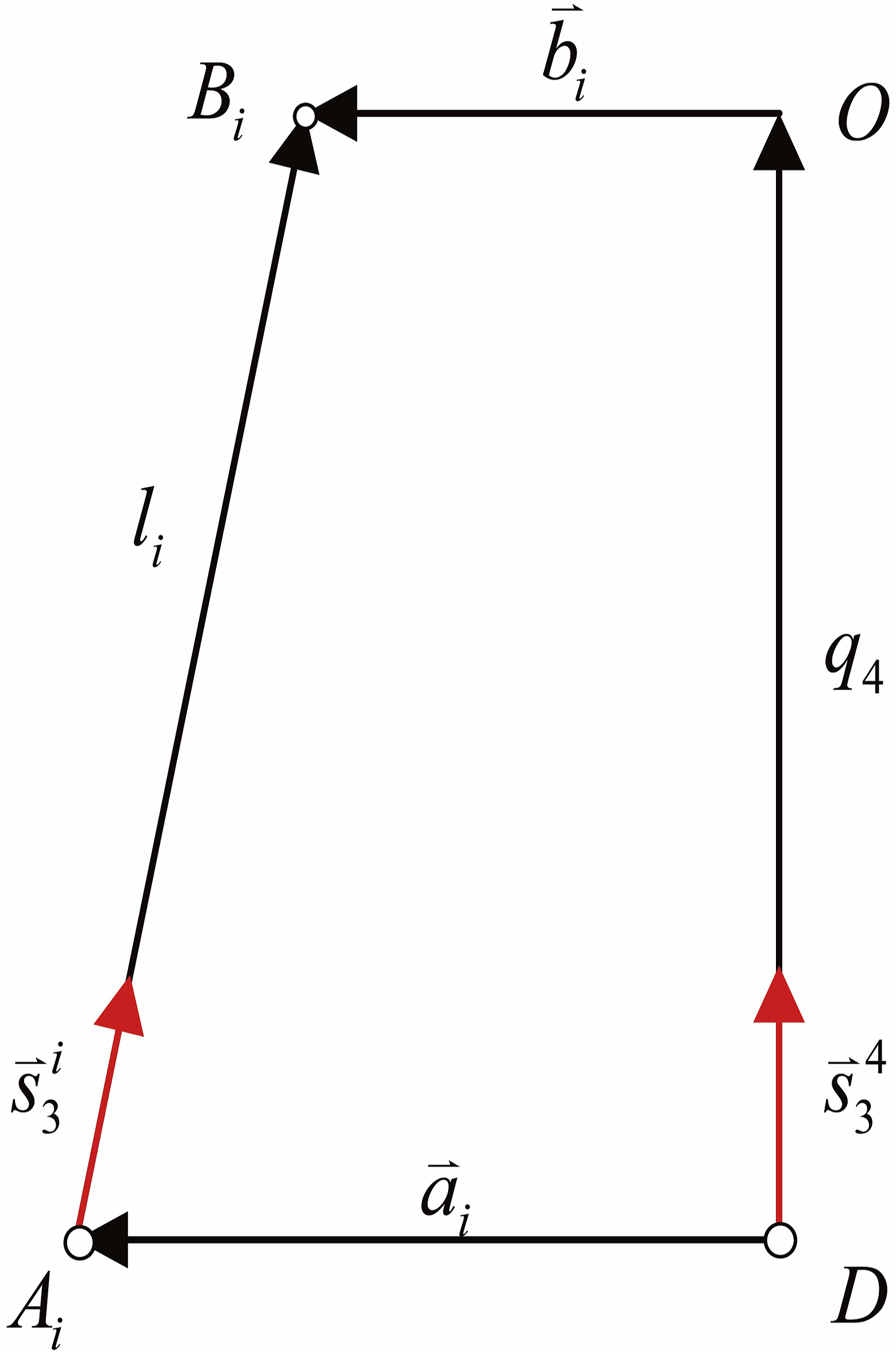
, the intersection point of the PU kinematic chain and the plane A1A2A3 is noted as point D, and the center point of Hook hinge of the movable platform connecting to the PU kinematic chain is noted as point O. The base coordinate system is established with the origin of the point D, and the direction of the vector The 3UPS/PU parallel robot model. Closed loop vector diagram.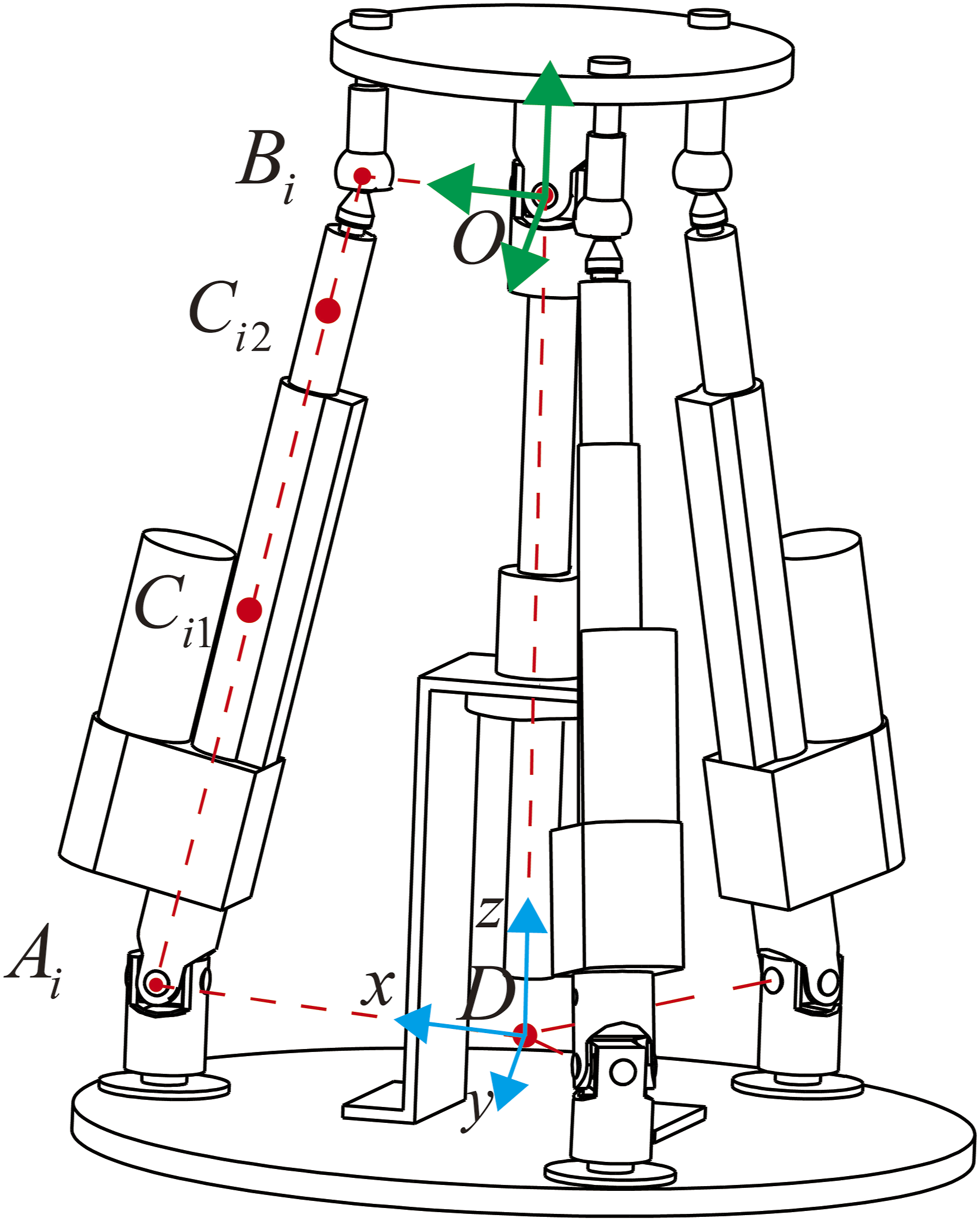


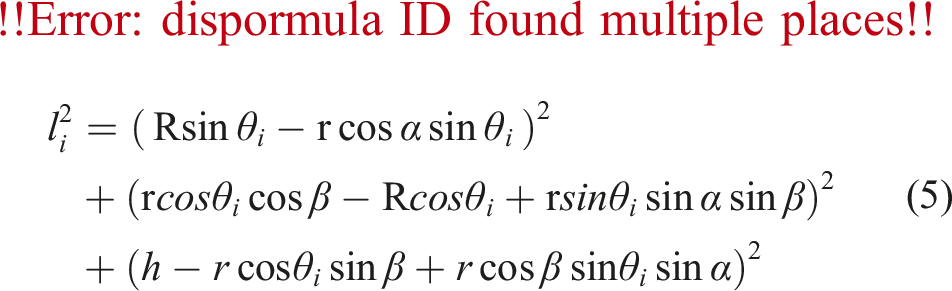
Differentiating Equation (1) with respect to time yields the velocity of point B
i
as:
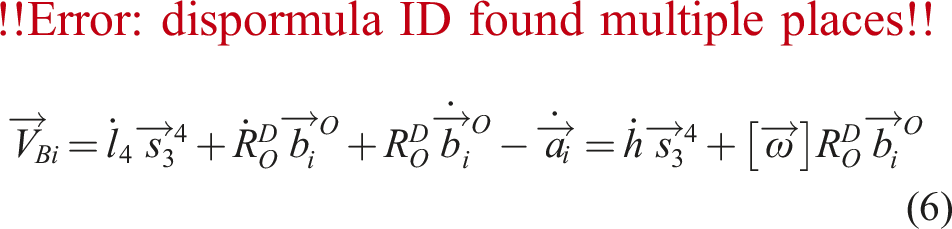
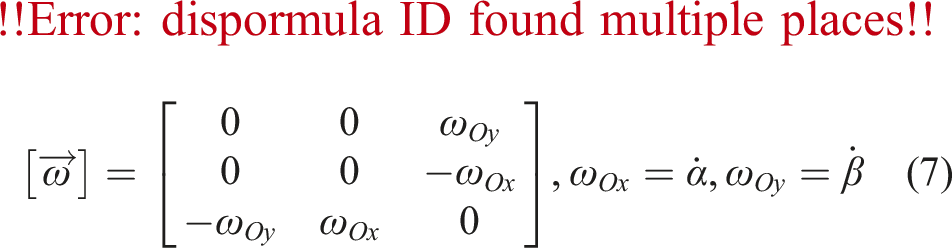

Fork multiplication operation with
The angular acceleration
Taking the first derivative of equation (6) with respect to time, we can obtain the acceleration at point B
i
:

From the closed-loop vector method, the positions of the center of mass Ci1 of the lower linkage of A
i
B
i
and the center of mass Ci2 of the upper linkage of A
i
B
i
can be calculated as:
From equation (12), the velocities and accelerations of the lower link centroid Ci1 and the upper link centroid Ci2 of A
i
B
i
can be calculated as follows:
2.2. Jacobian matrix of 3UPS / PU parallel robot
The Jacobian matrix of a parallel robot captures the relationship between joint velocities (from robot drive joints) and the spatial velocities of the robot’s end effector during manipulation. Its essence lies in mapping the tangent space of the configuration space (reflected by the Lie group) to the Lie algebra. Specifically, the Lie algebra corresponds to the tangent space at the group’s identity element. The Lie algebra se(3), residing in this tangent space, exhibits a linear structure (Condurache, 2022), making computations more straightforward than the displacement manifolds associated with the special Euclidean group SE(3). Given its connection to the Lie algebra se(3), the screw representation is well-suited for describing the Jacobian matrix of the parallel robot.
T.Huang’s work introduced a generalized Jacobian matrix for parallel robots, capitalizing on the orthogonal and dual relationships among the robot’s four screw spaces (Huang et al., 2011). This simplified approach to constructing the Jacobian matrix is particularly well-suited for parallel robot applications. In the subsequent subsection, we apply T. Huang and Tsai, L.W.’s method (Tsai, 1999a) to create the Jacobian matrix that links drive motion to end-effector screw motion in a 3UPS/PU parallel robot. Additionally, we employ the vector derivation technique to establish the Jacobian matrix connecting the side-branch chain’s variational screw with the robot’s dynamic platform variational screw.
The element
'The coordinate system shown in Figure 3 is established for the parallel robot platform, the origin of the base coordinate system 3UPS/PU parallel robot coordinate system.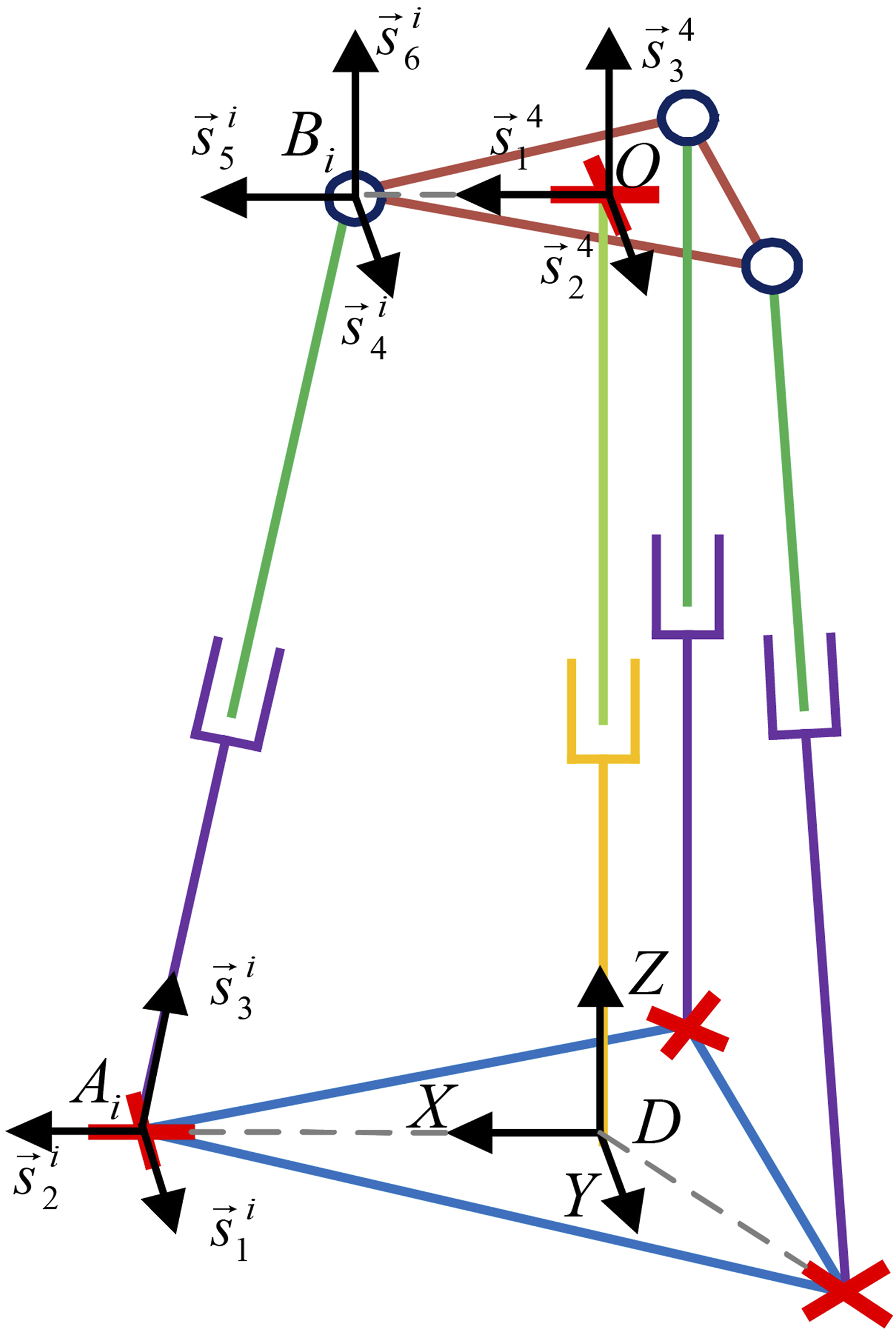
For the kinematic chain OD, its four subspace screw’s bases can be written according to the direct observation method (Tsai, 1999a), and the screw’s bases of its kinematic variational screw subspace are:
The screw’s base of the constraining wrench subspace is:
According to the dual relation and the kinematic variational screw subspace, we can get the bases of the actuation wrench subspace:
Similarly, we can get the bases of the constraining variational screw subspace:
The kinematic chain A
i
B
i
is an unconstrained branched chain with six independent screw’s bases, and the screw’s bases in the kinematic variational screw subspace can be written out by the direct observation method:
The drive on A
i
B
i
has only moving joints, so its actuation wrench subspace has only one nonzero screw:
According to the principle of mechanism composition, the velocity of the end-effector platform of a parallel robot is constituted by the intersection of all the end points of its motion chains, for the relationship between the kinematic chain A
i
B
i
and the moving platform, we can get:
There is a relationship between the kinematic chain OD and the mobile platform:
Reciprocal product operations are performed on both sides of equation (23) for the driving wrench
Since the 3UPU/PS parallel robots are driven only by moving subs on A
i
B
i
, that is, the actuation wrench subspace

Taking reciprocal product operation for both sides of equation (24) with respect to

Equations (26) and (27) constitute the generalized velocity Jacobian matrix of the 3UPS/PU parallel robot:

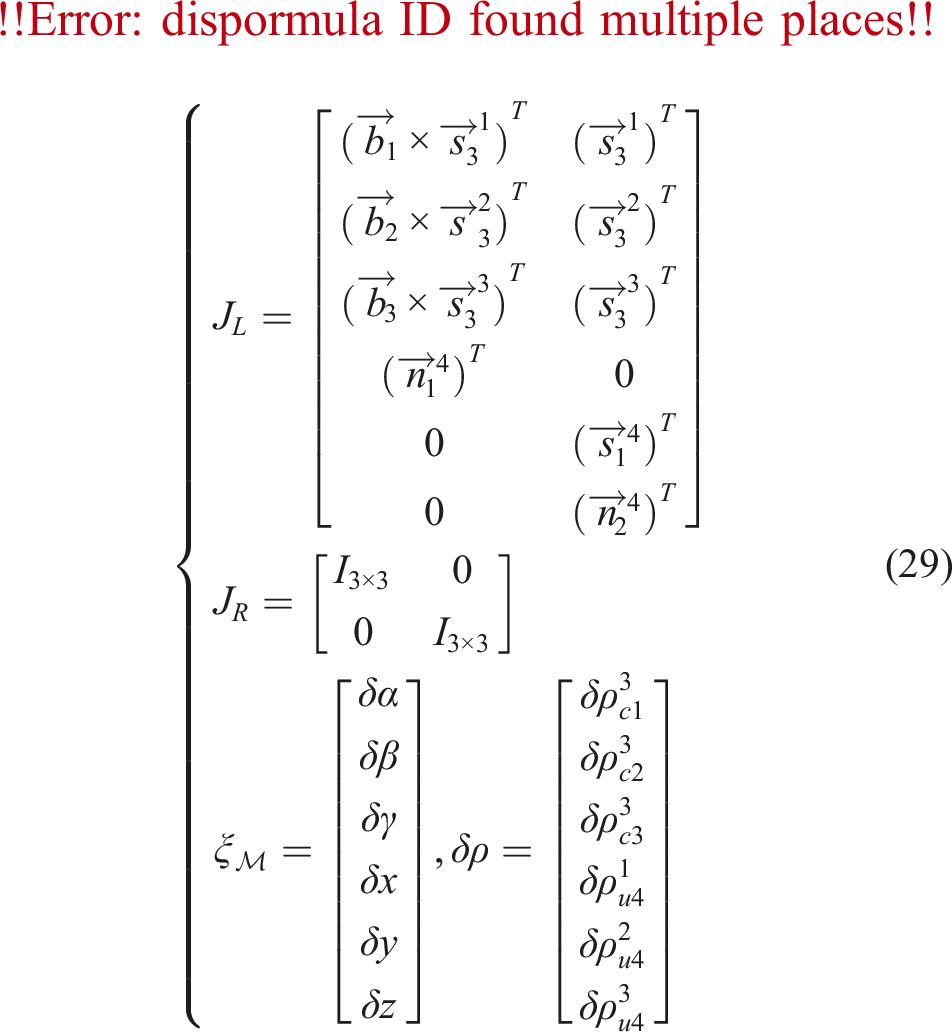
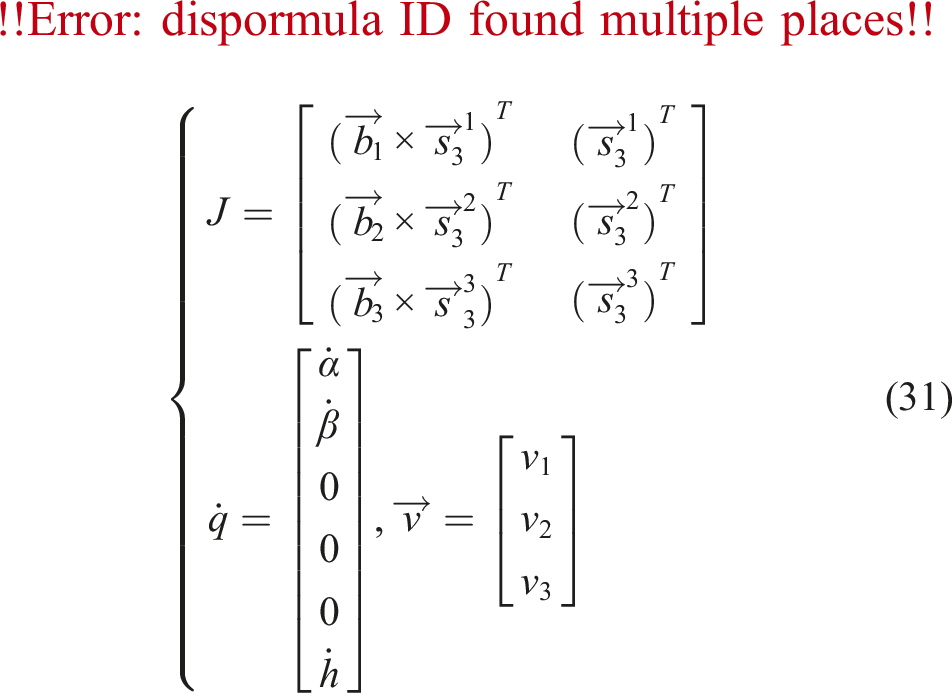
The initial three rows of the generalized velocity Jacobian matrix describe the connection between the parallel robot’s platform velocity and the drive velocity. This relationship can be expressed as:

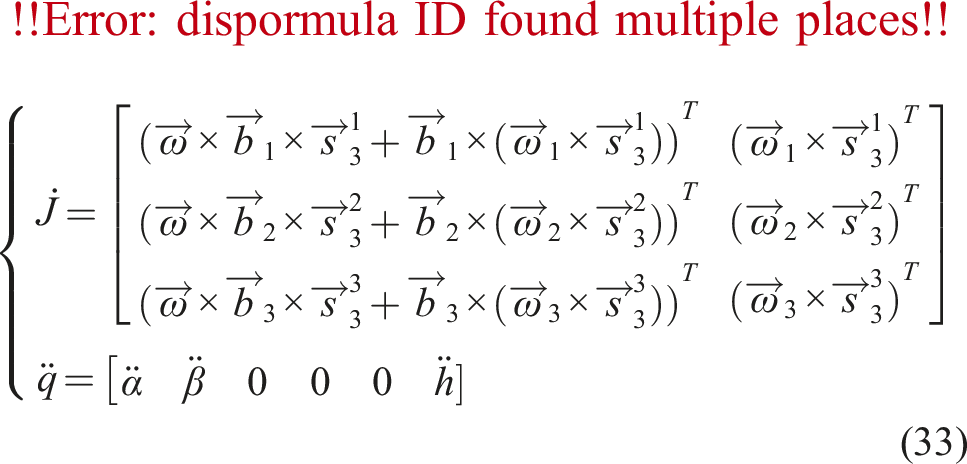
Taking the time derivative of equation (30), we obtain the connection between platform acceleration and drive acceleration:

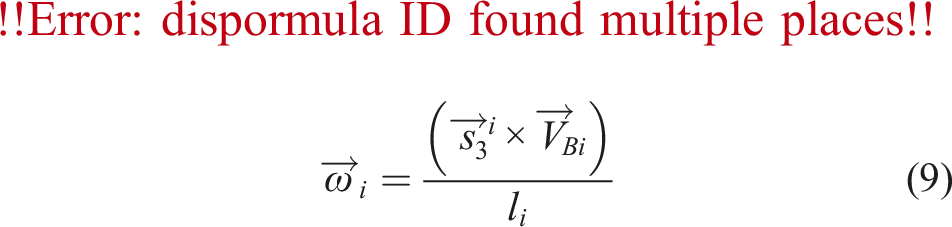
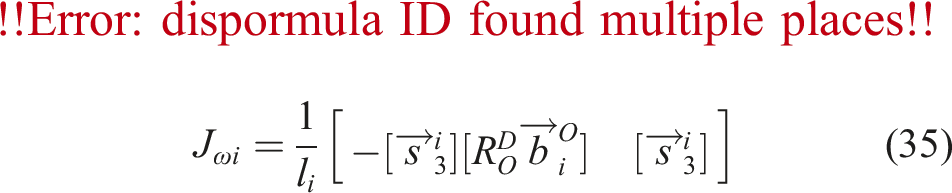
From equation (9), we obtain the Jacobian matrix J
ωi
, which relates the variation in the angle of A
i
B
i
to the variation in the moving platform’s screw:

From equation (13), we can get:


The Jacobi matrix describing the relationship between the variational screw of the lower linkage center of mass of A
i
B
i
and the variational screw of the moving platform is:
The Jacobi matrix describing the relationship between the variational screw of the center of mass of the upper link of A
i
B
i
and the variational screw of the moving platform is:
For the chain OD, whose center-of-mass velocity is the same as that of the moving platform and which has only translational displacement, in order to uniformly translate the motion variability to the variational screw of the moving platform, the Jacobi matrix between the variational screw δξ4 of the center-of-mass of the chain OD and the variational screw of the moving platform is expressed as:

For logical clarity, here we directly present the results after taking the first-order derivative of the Jacobian matrices (35), (37), and (39) with respect to time:
3. Dynamic model construction based on screw theory and d’Alembert-Lagrange equation
This paper aims to model the dynamics of parallel robots accurately. Without the need for intermediate joint force variables, we focus on the control problem. Employing the screw-based d’Alembert-Lagrange equation approach, we construct a control model specifically designed for parallel robots.
The d’Alembert-Lagrange equations, also known as the virtual work principle of dynamics, represent a powerful analytical tool in mechanics. These equations combine d’Alembert’s principle with the virtual displacement principle. Unlike Newton’s Euler equations, which necessitate calculating constraint forces for each joint, the d’Alembert-Lagrange equations simplify the dynamics analysis of parallel robots by eliminating the need to compute intermediate forces. This advantage is particularly pronounced for complex dynamic systems like parallel robots with numerous coupled joints. In the context of parallel robots, where non-driven joints do not contribute to the force dynamics, the d’Alembert-Lagrange equations are more suitable. Moreover, they facilitate obtaining explicit analytical solutions—an advantage over the Lagrange equations, which involve extensive derivative operations.
The screw theory, based on Lie group and Lie algebra, offers a more suitable tool for representing spatial motion, particularly for expressing the spatial force and velocity of a rigid body. Moreover, it simplifies the calculation of the inertial wrench in rigid body space, as shown in equation (47), thereby facilitating the integration of screw theory with the d’Alembert-Lagrange equations. This integration is based on the principle of energy conservation, similar to bonding diagrams (Guo et al., 2015; Ma et al., 2018), and incorporates external force, inertial force, and virtual displacement as main elements. The concept of energy can be extended from virtual work, an energy mediator, to the operation of screw quantities. Utilizing the screw form for the three main elements in the d’Alembert-Lagrange equation—external force, inertial force, and virtual displacement—allows the virtual displacement to correspond to the element of the variational screw in the movable variational space. Meanwhile, the force vector can be generalized to the wrench, and the computation of inertial force can be replaced by that of the inertial wrench.
Let the external force on the moving platform be
From the equation for the inertial wrench rotation of a rigid body (see Appendix for detailed derivation), the inertial wrench


The virtual work of moving the platform for:
The virtual work done by the driving force
The virtual work done by the driving force on all chains

Suppose that a robot has two variational screws δξ1 and δξ2, and the relationship between the two variational screws is δξ2 = J21δξ1, so the work of the wrench

It can be seen from equation (56) that the generalized wrench generated by the wrench

The virtual work generated by the upper rod of the A
i
B
i
chain is:

The gravity of the lower connecting rod of the A
i
B
i
chain is
The generalized wrench generated by the wrench

The virtual work generated by the lower rod of A
i
B
i
chain is:

The virtual work generated by the kinematic chain A
i
B
i
is:

Let the mass of the movable part of the chain OD be m4, then the inertia wrench of the centroid position of the chain OD is:

We can conclude that the virtual work generated by the inertia wrench


According to the d’Alembert-Lagrange equation, the dynamic equation of the parallel robot can be obtained by adding the virtual work generated by the above inertial wrench and the external wrench:
The rotation matrix and all the shape and position parameters of the parallel robot are brought in. Since δξ
M
≠ 0, equation (67) can eliminate δξ
M
and simplify it, and obtain:

4. Controller design
In this paper, we further discuss the control problem of parallel robots using the explicit robot dynamics equation (equation (68)). In the pseudo-linear dynamic model of the parallel robot, dynamic parameters change with the posture. Additionally, the modeling process does not consider the effects of unmodeled dynamics such as the frictions and other time-varying disturbances (Wu et al., 2021). These factors can lead to inaccuracies in the model. Therefore, we introduce unmodeled dynamics and external disturbances into the control model to improve the accuracy of the mathematical description of parallel robots, thereby providing a foundation for the design of high-precision controllers for parallel robots.
4.1. Control strategy design
To address the difficulty of traditional control models in resisting uncertain interference and to improve the accuracy and robustness of robot control, we employ the sliding mode control method to design the robot’s control strategy, thereby reducing the dependence on an accurate robot model.
The robot’s error is defined as:

The integral sliding surface is defined as:
To eliminate the chattering problem in sliding mode control, a chattering-free hyperbolic convergence law (Tao et al., 2018) is used to design the controller. This reaching law ensures that the sliding variable remains far from the sliding surface when the surface’s speed is high, and decreases rapidly when the sliding variable is very close to the sliding surface. This feature allows the controller to quickly reach the sliding surface without chattering (Zhao et al., 2024a). The convergence rate is determined by hyperbolic sine and hyperbolic tangent functions:
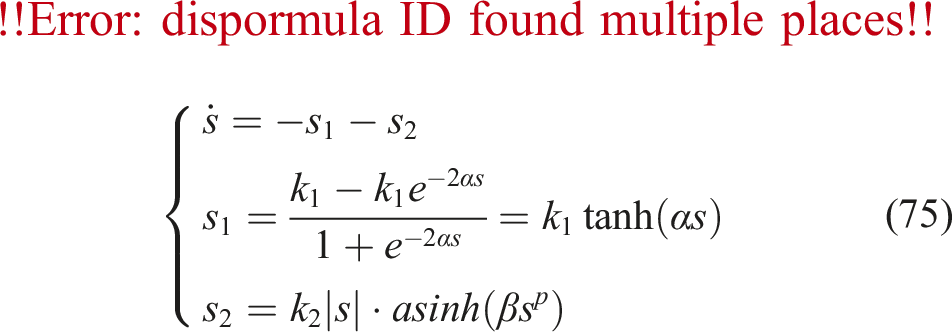
The impact of the parameters in equation (75) on the approaching speed of the sliding variable has been analyzed in detail in the article (Zhao et al., 2024b). The velocity of the sliding variable s near the sliding mold surface is controlled by adjusting k1 and α, while k2, β, and p determine the magnitude of s as it moves away from the surface. In this model, the parameters should not be too small to ensure sufficient approaching speed when the sliding variable s nears the sliding surface.
Deriving equation (74) to time, we can get:

From equations (75) and (76), we can get the controller output should be:
4.2. Stability analysis
To prove the stability of the controller, the Lyapunov function is defined as:

The time derivative of the Lyapunov function is given by:
It can be observed from equation (79) that the designed controller satisfies the Lyapunov stability condition, ensuring that the system is asymptotically stable.
4.3. Hyperbolic convergence law sliding mode disturbance observer design
In traditional sliding mode control, to achieve zero steady-state error, the switching gain is usually set higher than the upper bound of the total disturbance and model uncertainty. However, this larger switching gain causes greater chattering. The hyperbolic convergence law sliding mode control can significantly reduce the system chattering caused by sliding mode switching. The purpose of designing this observer is to estimate the disturbance value, feed it back to the controller, and offset the disturbance at the controller level, thereby improving the system’s robustness.
Firstly, the disturbance part of the original system is defined as the extended state variable
The observer is designed as:
The observer error is defined as:

The error state equation obtained by subtracting equation (80) from equation (81) is:
The sliding mode surface of the observer is defined as S = E2. The derivative of the sliding mode surface is
In equation (84),
It can be solved by equation (85):
That is, the observation error of the observer to the disturbance can approach zero in a finite time.
The extended sliding mode observer based on the hyperbolic convergence law does not rely on an accurate mathematical model of the controlled object and does not require direct measurement of disturbances and their effects. This makes it particularly suitable for controlling parallel robots, which are challenging to model accurately (Gu et al., 2022). We combine the hyperbolic convergence law sliding mode controller with the observer to develop a control strategy for the parallel robot. The control scheme is illustrated in Figure 4. Schematic diagram of the control strategy.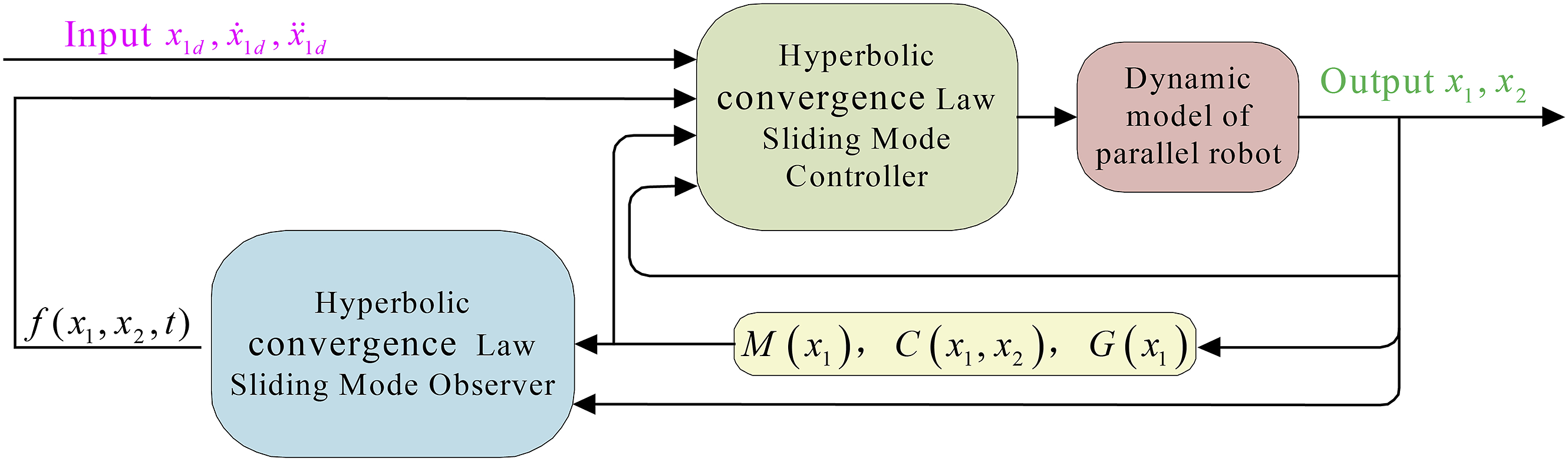
5. Simulation
Simulation signal source.

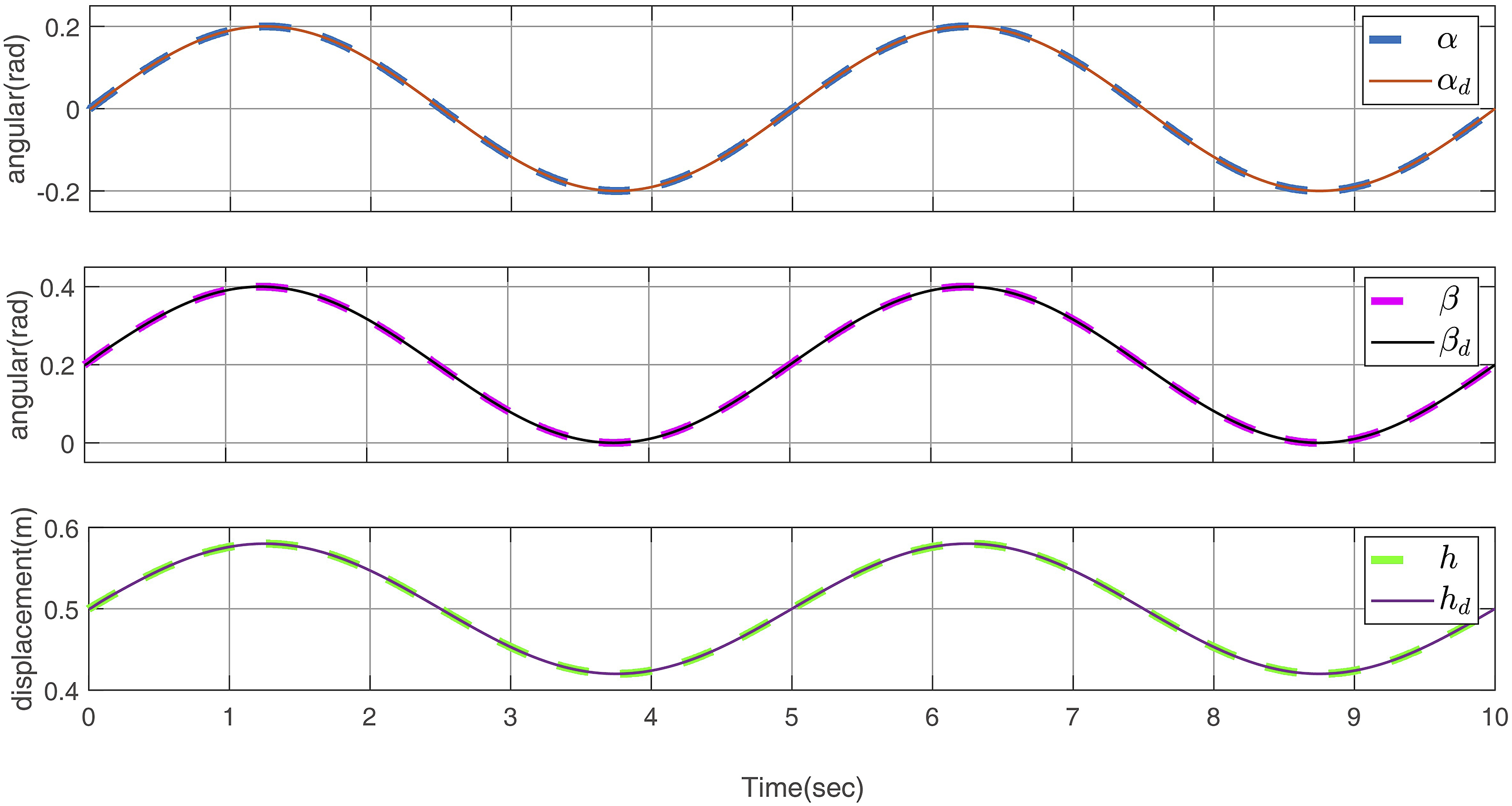
Trajectory tracking curve.
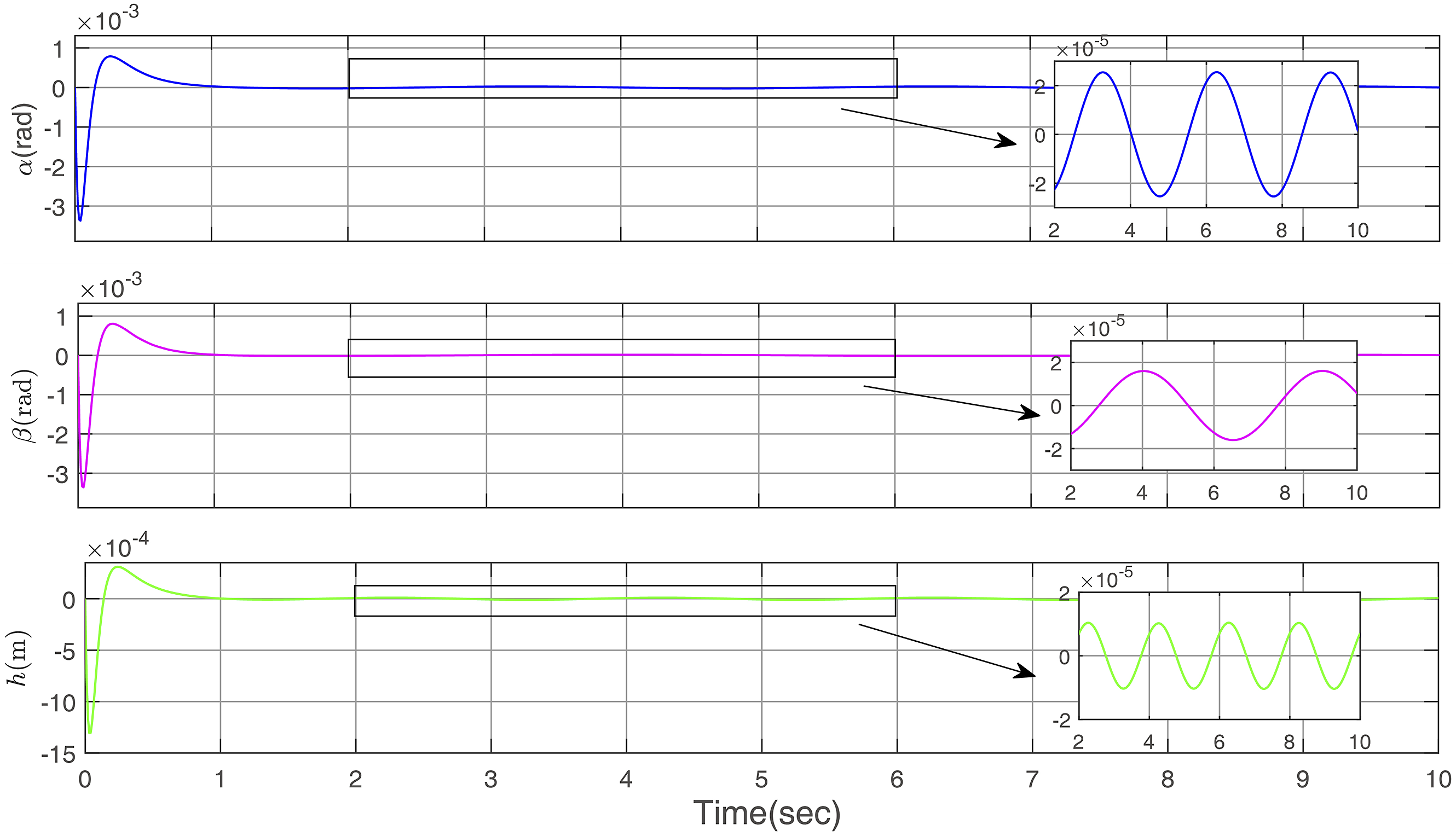
Tracking error curve.
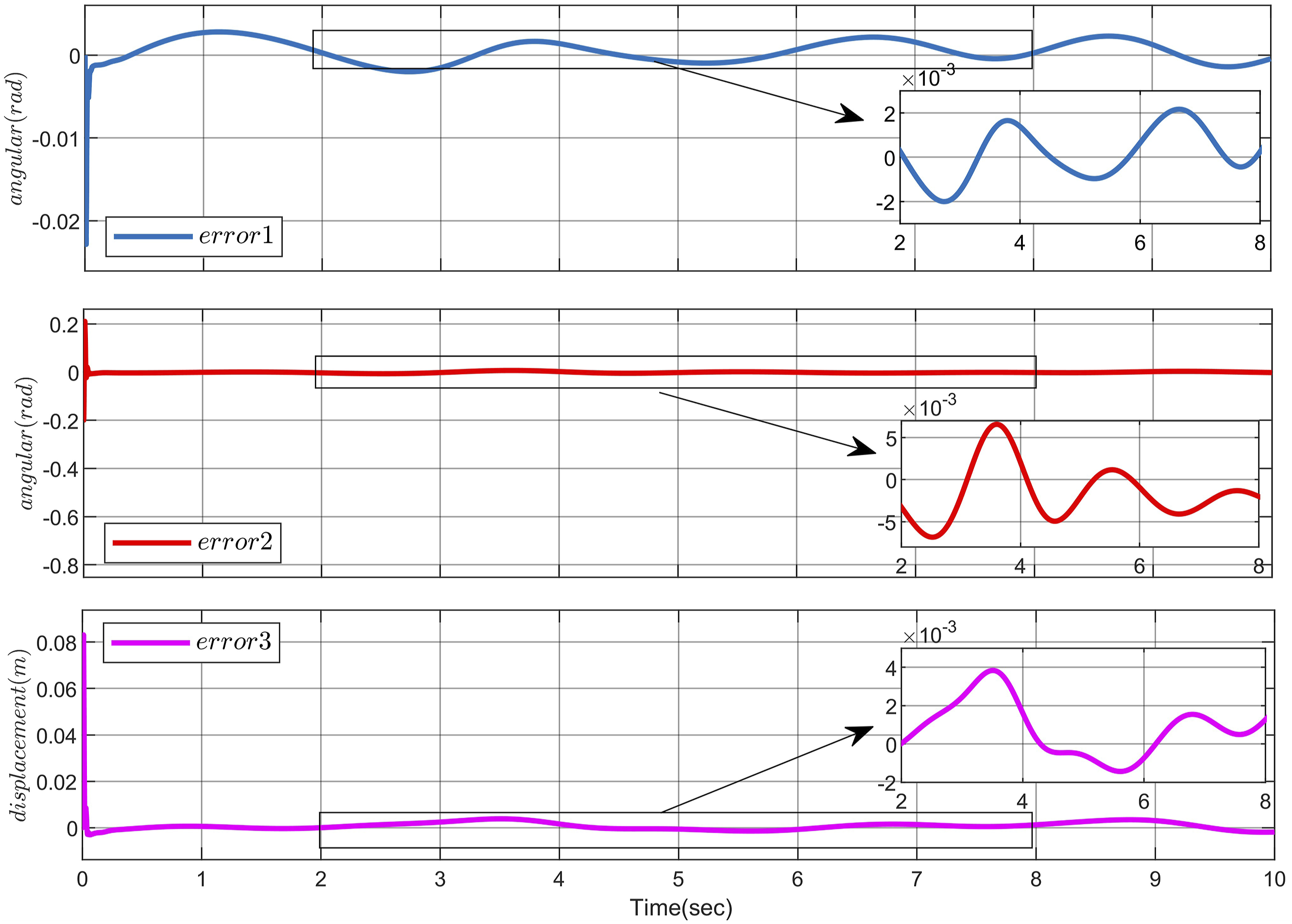
To evaluate the performance of the observer, the tracking curve of the observer to the set disturbance and its error curve are provided, as shown in Figures 7 and 8. The observer can track the disturbance within 0.1 seconds and control the tracking error within the order of 10−3, demonstrating its effectiveness. Utilizing the observer can offset the disturbance at the controller level to a certain extent, thereby improving the system’s robustness. Observer tracking curve. Observer error curve.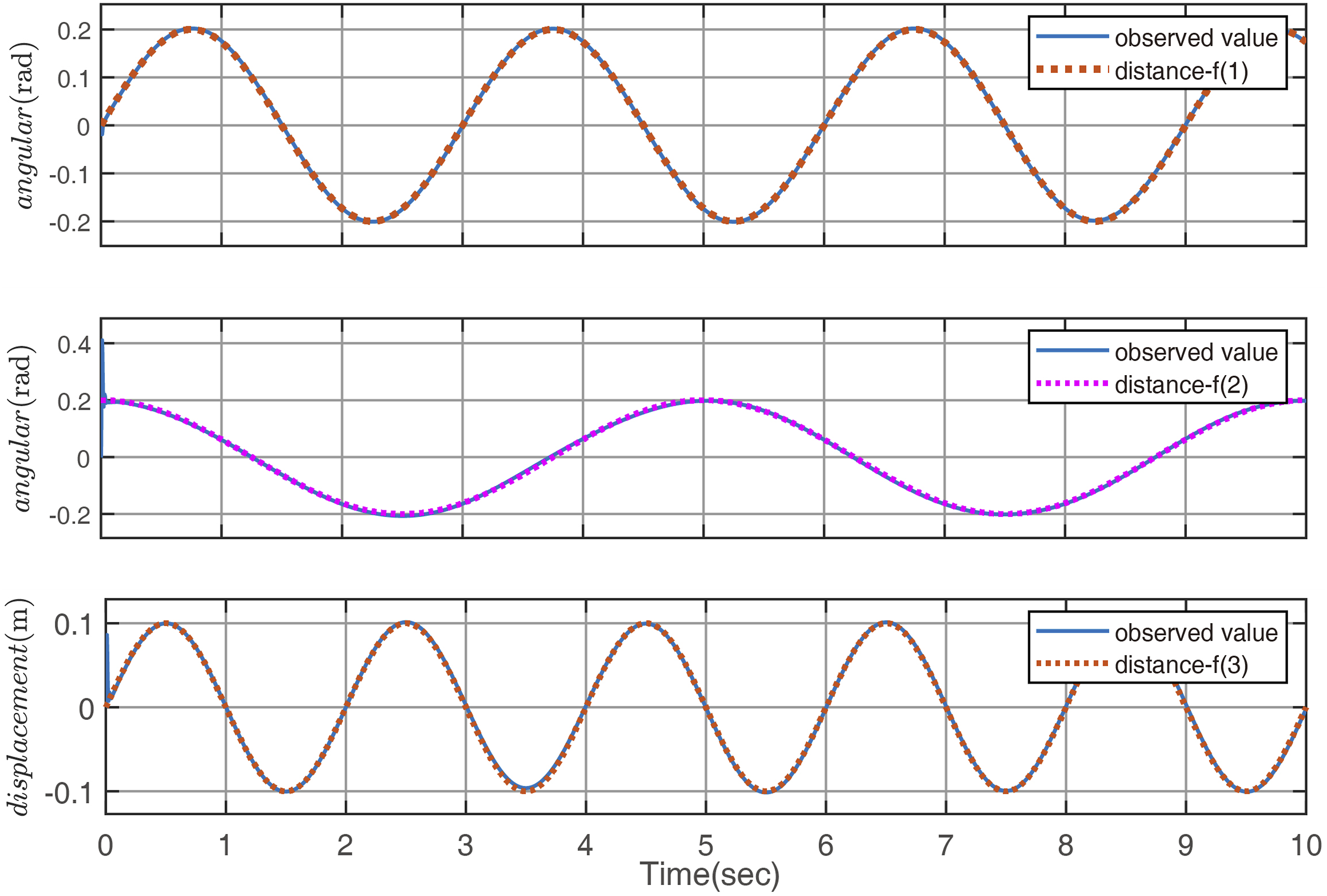
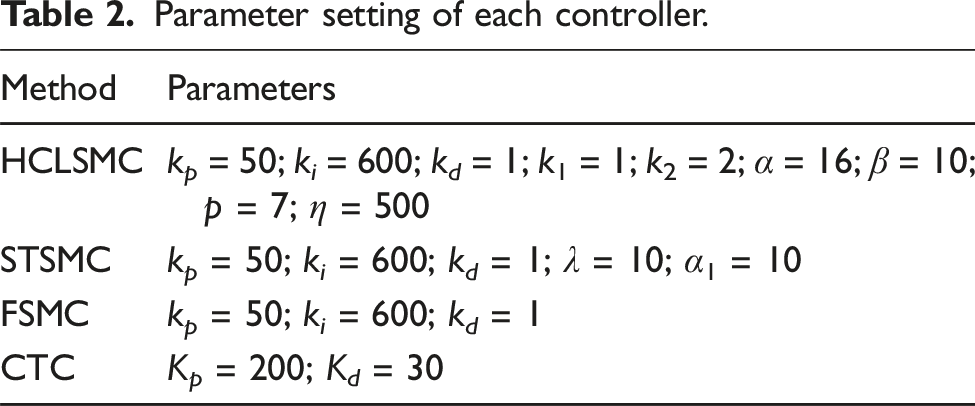
To demonstrate the excellent performance of the hyperbolic convergence law sliding mode control strategy proposed in this study for the parallel robot, we compare it with recent control strategies. Controllers such as the computational torque controller (CTC), fuzzy sliding mode controller (FSMC), and super-twisting sliding mode controller (STSMC) exhibit better convergence speed and control accuracy, respectively. The computational torque controller significantly improves error convergence speed compared to feed-forward PD and simple PID control. Meanwhile, the fuzzy sliding mode controller and super-twisting sliding mode controller are more effective in reducing the jitter and vibration associated with sliding mode control. In traditional sliding mode control, the jitter mainly comes from the discontinuity of the control signal, the fuzzy sliding mode controller ensures that the convergence speed is small near the sliding mode surface and increases when moving away from the sliding mode surface by means of fuzzy rules, and the super-twisting sliding mode avoids the direct use of the high-gain switching function term by the design of convergence law. Instead, it employs a state estimation term and a switching function that is related to the output error magnitude, and this design makes the control signal more continuous and smooth.


Parameter setting of each controller.
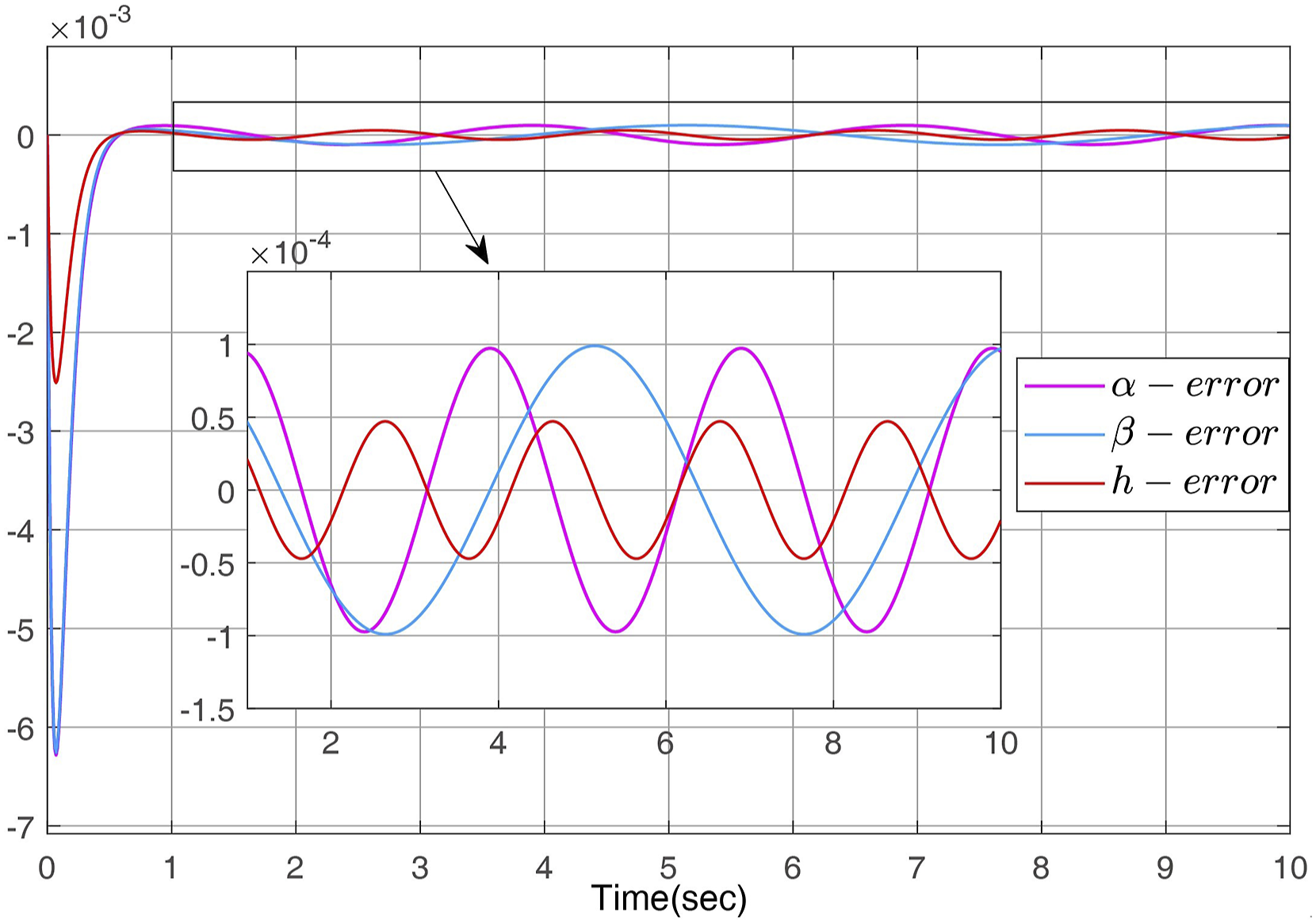
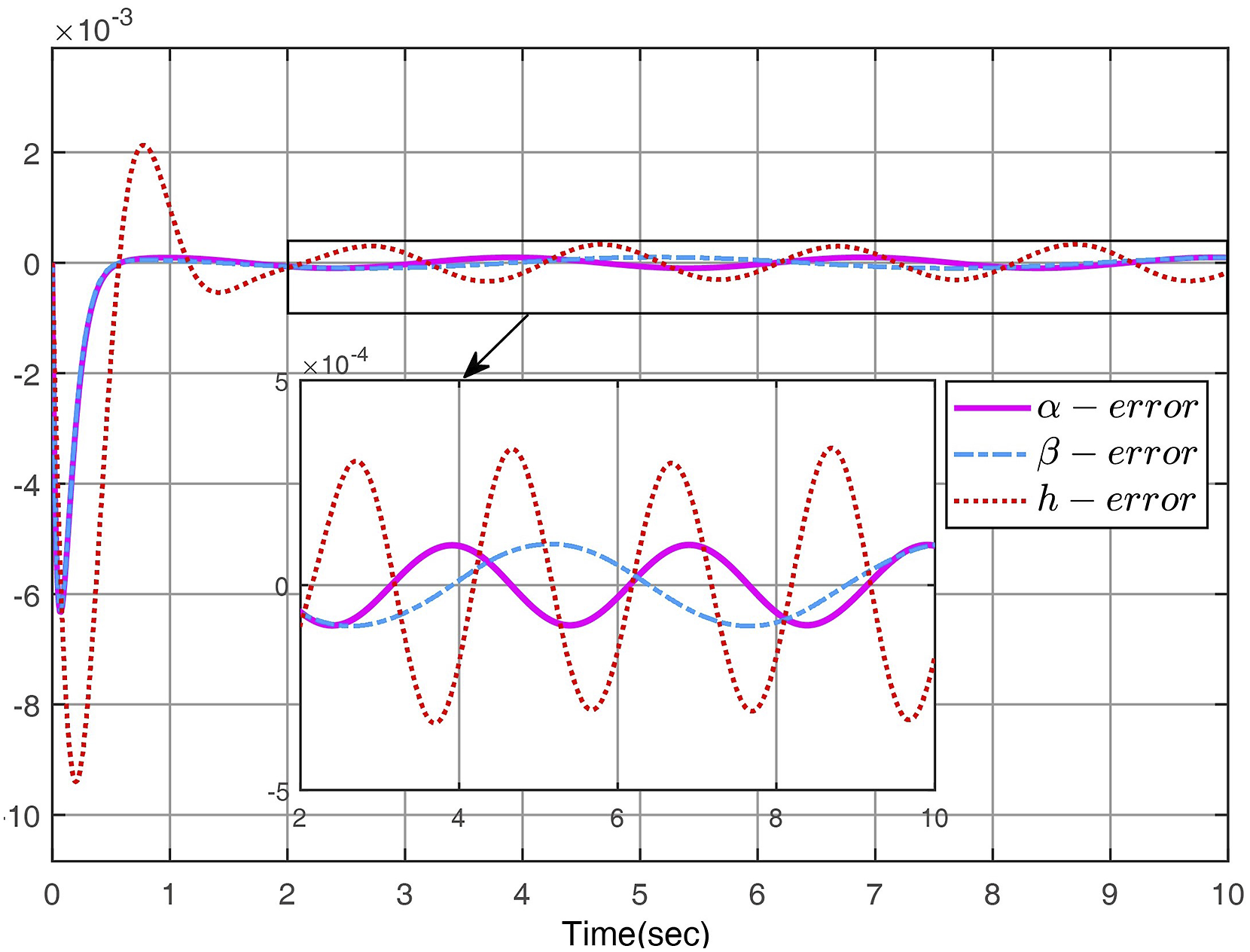
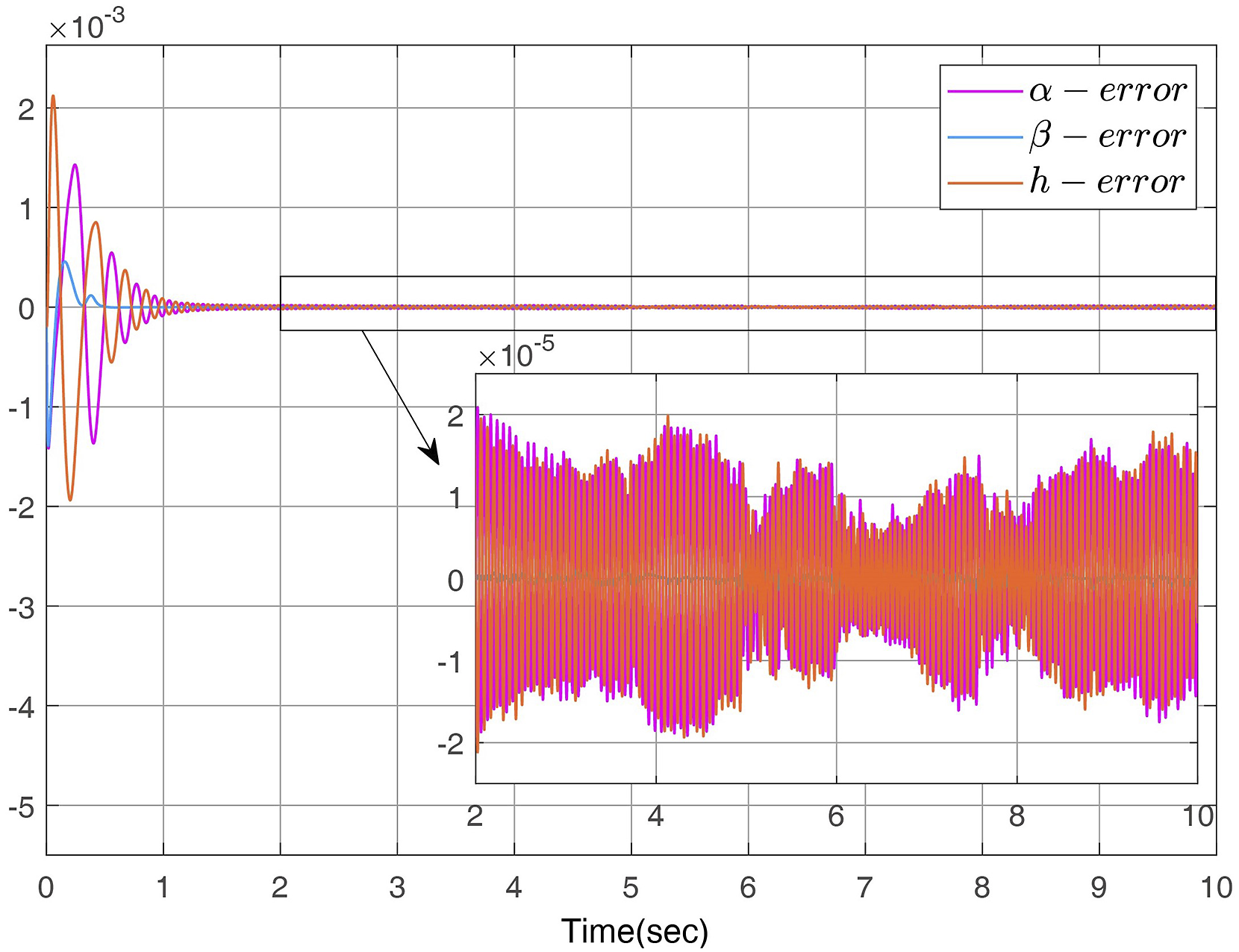
We compare the hyperbolic convergence law sliding mode control strategy proposed in this paper with the three aforementioned control strategies. First, Wu et al.’s fuzzy sliding mode control strategy (Wu et al., 2021) (see Figure 9) exhibits a tracking error of 1 × 10−4, whereas the control strategy presented in this paper achieves a higher control accuracy with a tracking error of 2 × 10−5. Furthermore, the controller devised in this study outperforms the fuzzy sliding mode control strategy in terms of speed, converging to a smaller error within 0.3 seconds. When compared to commonly used feedforward PD control and computational torque control methods in robotics (see Figure 10, Figure 11), the control strategy proposed in this paper exhibits substantial enhancements in control accuracy and tracking speed. In contrast to the super-twisting sliding mode control strategy (Dai et al., 2019; Saied et al., 2023) (see Figure 12), the control approach presented here achieves both chattering-free behavior and faster convergence speed without compromising accuracy. Fuzzy sliding mode controller tracking error. Calculate torque controller error. Feedforward PD controller error. Super-twisting sliding mode controller error.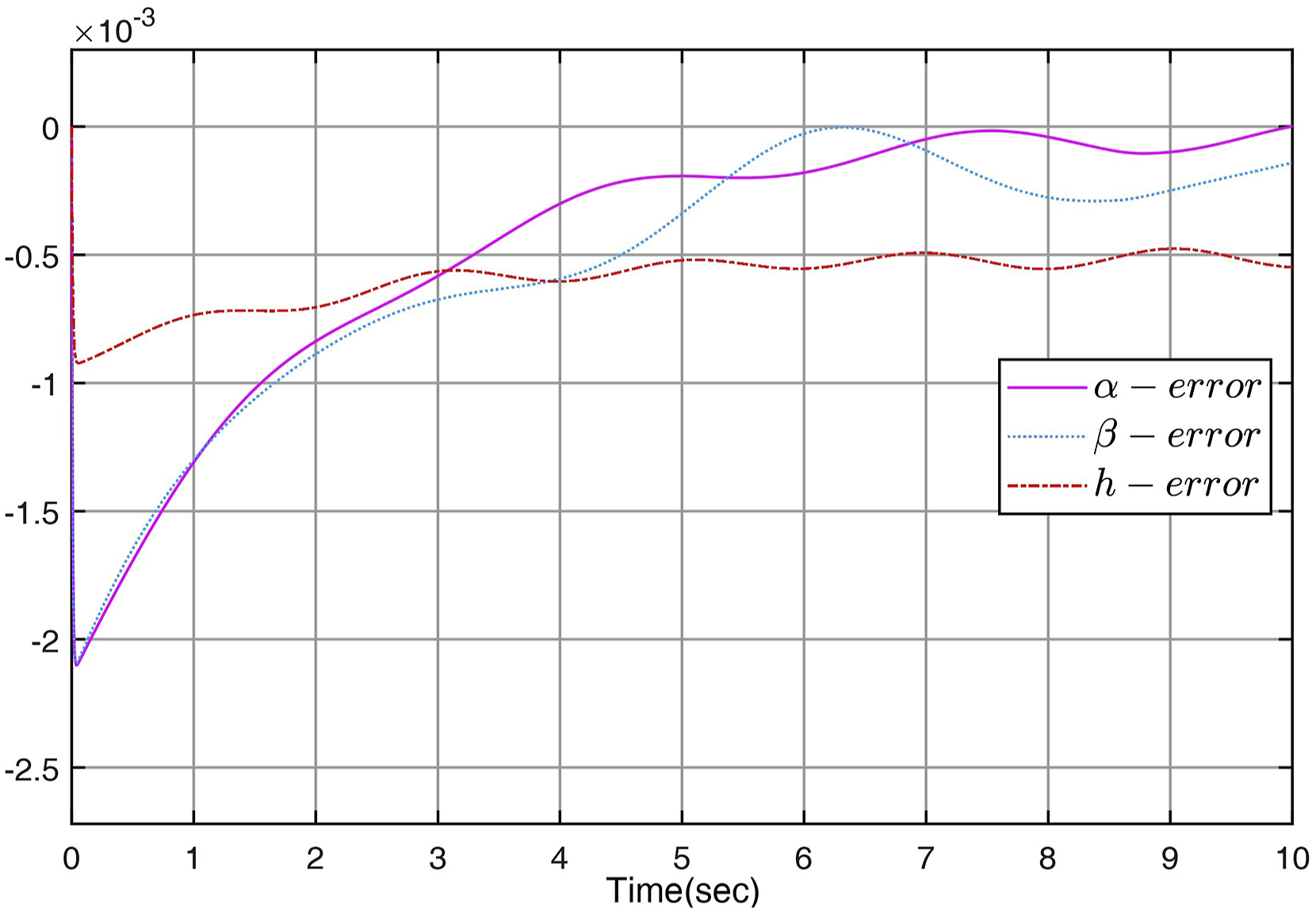
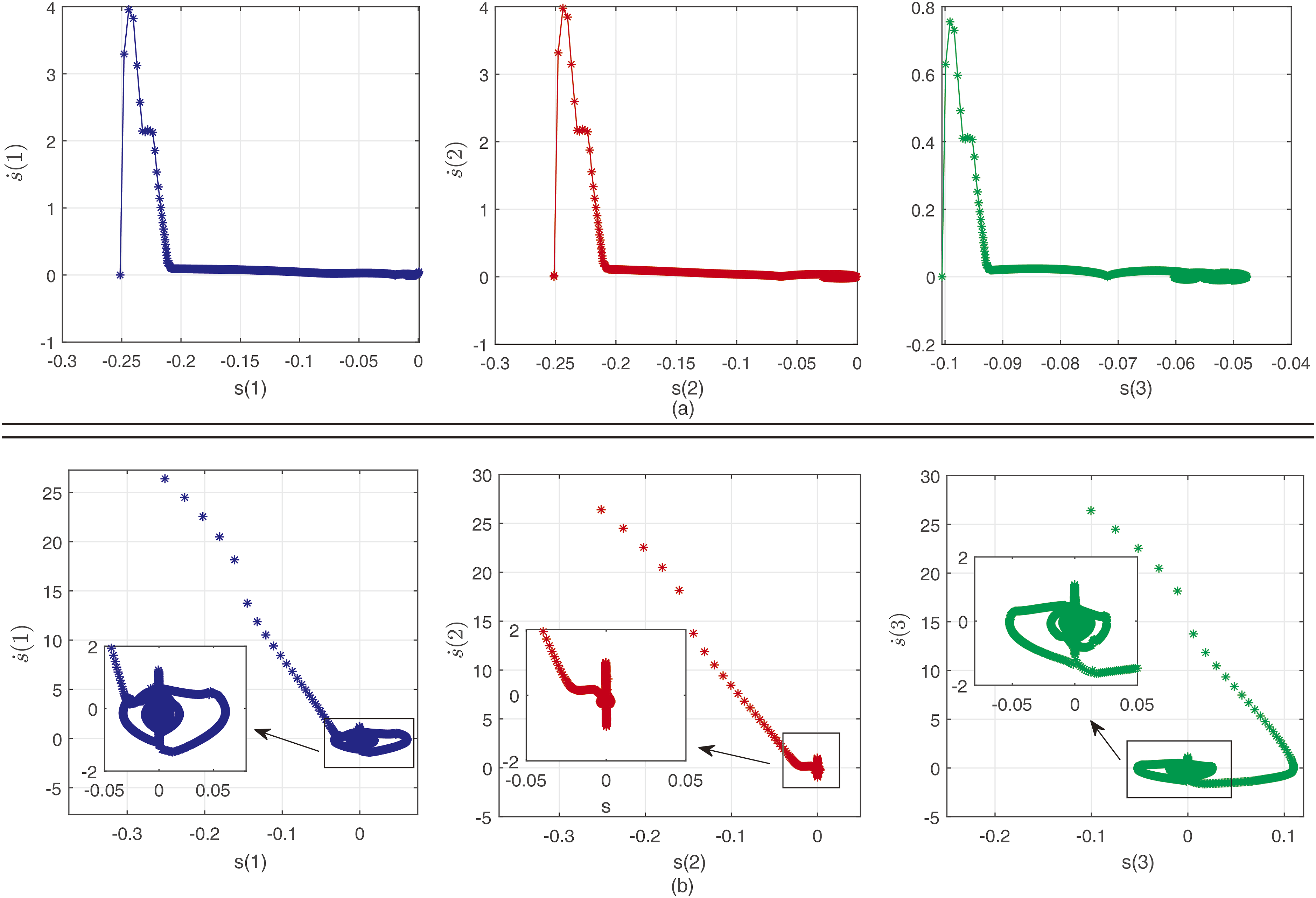
To verify the performance of the parallel robot controller in eliminating chattering, the phase diagram of the sliding mode control based on the hyperbolic convergence law is presented in Figure 13. The control phase diagrams for fuzzy sliding mode control and super-twisting sliding mode control algorithms, which can reduce chattering, are shown in Figure 14. From the phase diagrams, it can be observed that the sliding mode control based on the hyperbolic convergence law exhibits very low speed near the sliding mode surface and no jitter. The slow movement of the sliding variable only causes it to slowly cross the sliding mode surface. The hyperbolic convergence law sliding mode control strategy quickly increases the speed of approaching the sliding mode surface when it is far from it, demonstrating good performance. Although the super-twisting method reduces the amplitude of chattering, some jitter remains, especially near the sliding mode surface, where its approaching speed is larger than that of the hyperbolic convergence law sliding mode control strategy. Therefore, it is less effective in suppressing jitter. The phase diagram also shows that the fuzzy sliding mode can effectively suppress chattering, but the approaching speed becomes very slow when it is not in the smaller neighborhood of the sliding mode surface, affecting the speed of reaching the sliding mode surface. Additionally, the phase diagram indicates that the steady-state neighborhood of the sliding mode control using the hyperbolic convergence law method, when reaching the sliding mode surface, is 0.02. In comparison, the steady-state neighborhoods are 0.2 for the fuzzy sliding mode control and 0.1 for the super-twisting sliding mode control when approaching the sliding mode surface. The hyperbolic convergence law method of sliding mode control, therefore, approaches the sliding mode surface in a significantly smaller neighborhood and maintains stability. This demonstrates the high accuracy of this control strategy. Overall, the sliding mode control based on the hyperbolic convergence law designed in this paper achieves good results in suppressing chattering and reaching speed. Hyperbolic convergence law sliding mode control phase diagram. (a) Fuzzy sliding mode control phase diagram and (b) super-twisting sliding mode control phase diagram.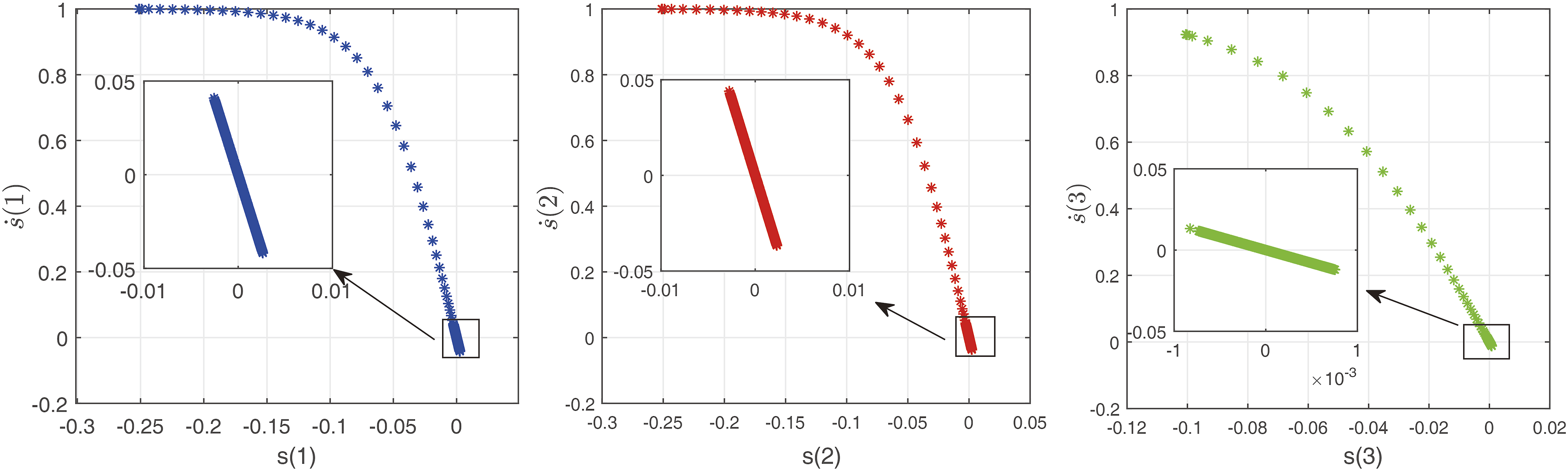
6. Conclusion
This paper introduces an improved dynamic modeling method for parallel robots based on screw theory and the d’Alembert-Lagrange equation, along with a chattering-free sliding mode control strategy. The proposed method calculates inertial wrench using screws and unifies the modeling process for parallel robots. The modeling method can be accomplished by relying on the same set of spin coordinates, which simplifies the modeling process of the parallel robot control problem. The double hyperbolic convergence law sliding mode control method can theoretically and effectively eliminate chattering in sliding mode control, and has the property that the sliding mode variables are closer to the sliding mode surface, which significantly improves the error convergence accuracy and enhances the robustness of the system. Simulation results demonstrate that the sliding mode control strategy based on the hyperbolic convergence law effectively controls the parallel robot, the control accuracy has improved from the order of 10−4 to the order of 10−5 compared to control methods with less jitter, such as fuzzy sliding mode control methods, offering advantages in eliminating chattering, reducing tracking error, and improving response speed. Therefore, the proposed screw-based dynamic modeling and sliding mode control strategy effectively meets the precise control requirements of parallel robots.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is supported in the National Natural Science Foundation of China under Grant (52375490).