
Abstract
In recent years, operational modal parameter identification has become crucial in fields such as engineering, aerospace, mechanics, and civil infrastructure, as well as in analyzing complex structures. However, when the number of sensors is fewer than the modal parameters to be identified, the system becomes underdetermined, meaning that the limited sensor data cannot fully capture the system’s modal information. This often results in uncertainties and challenges in the identification process. Current methods for underdetermined operational modal parameter identification typically rely on signal sparsity or statistical independence assumptions, often requiring signal preprocessing to enforce sparsity, which restricts their applicability. To address these limitations, this study presents a novel underdetermined operational modal parameter identification method based on autocorrelation-optimized principal component tensor decomposition. This approach first establishes a connection between operational modal parameter identification and CP tensor decomposition, then introduces a new tensor construction technique that combines statistical characteristics of the data with time-series analysis. By decomposing the constructed tensor, the method extracts the modal shape matrix along with a set of sub-tensors representing modal responses, enabling the estimation of modal parameters. The method’s effectiveness is verified through experiments on a three-degree-of-freedom spring oscillator and a uniform cantilever beam structure, even under underdetermined and noisy conditions. Results demonstrate that the proposed method outperforms existing techniques in both recognition accuracy and noise resistance, providing a stable and precise identification of operational modal parameters.
Keywords
1. Introduction
In industries such as aerospace, automotive, maritime, railways, and heavy machinery, vibration sensitivity is a critical concern. With the increasing scale and dynamic loads on engineering structures (Taira et al., 2020), accurate modal parameter identification has become essential for ensuring structural safety and maintainability. Modal analysis is commonly used for quality control and structural health monitoring, (Rehman et al., 2024; Giordano et al., 2023; Nicoletti et al., 2023) providing vital data for managing potential failures.
Operational Modal Analysis (OMA) (Qin et al., 2024; Civera et al., 2023) derives modal parameters from response signals and has become widely used in structural monitoring across fields such as wind turbines, high-speed aircraft, and automotive engines (Zahid et al., 2020). However, as engineering structures become faster (Li et al., 2023), larger, and more complex, obtaining complete and accurate modal information is challenging, especially when sensor placement is limited (Feng and Feng, 2018). This limitation creates underdetermined conditions (Guan et al., 2019), where the data from a few sensors fail to capture the system’s full dynamic response, hindering effective modal analysis (Cadoret, 2023).
To address underdetermined identification, two primary approaches have emerged: sparsity-based algorithms (Yu et al., 2014) and tensor decomposition methods (Guan et al., 2021). Sparse Component Analysis (SCA) (Yao et al., 2022; Liu et al., 2020), which leverages signal sparsity in the frequency or time-frequency domain (Karami et al., 2020), has shown promise. By applying various transformations (e.g., Short-Time Fourier (Zhang and Deng, 2023), Discrete Cosine (Yang and Nagarajaiah, 2013), Wavelet Packet Transforms (Li et al., 2016)), SCA allows sparse signal representation, followed by clustering techniques (Zhou et al., 2018) to estimate mode shapes. However, the accuracy of this method heavily depends on clustering quality (Yao et al., 2018), which may lead to loss of modal information if suboptimal (Sadhu et al., 2013).
Tensor decomposition methods, such as those based on the Parallel Factor Analysis (PARAFAC) framework (Friesen and Sadhu, 2017), offer high computational efficiency and avoid the need for independence or sparsity assumptions. Recent advances using Block Term Decomposition (BTD) (Guan et al., 2021) have enabled accurate mode identification in limited-sensor settings by leveraging low-rank signal representations (Greś et al., 2021). Nevertheless, these methods face several challenges (Bousse et al., 2016). First, there is a need to optimize decomposition parameters because the choice of rank and other hyperparameters in Block Term Decomposition (BTD) directly impacts the accuracy and generalization of the model. Without proper optimization, the decomposition may fail to capture the essential modes of the data or lead to overfitting (Le et al., 2024; Li et al., 2016). This optimization process can be computationally expensive and requires careful tuning to adapt to different datasets or applications. Second, the limitations of static tensor construction pose another significant challenge. In many real-world scenarios, the data is not stationary and exhibits temporal or dynamic characteristics, such as in time-series or sequential data. Static tensor methods assume a fixed structure of the data, which may overlook important time-dependent features and non-stationary data characteristics. For example, in industrial systems, the behavior of the system can change over time due to external influences or system degradation, which static methods cannot adapt to. As a result, these methods may fail to accurately represent or predict the system’s behavior over time, leading to suboptimal mode identification or poor predictive performance (Koutsoukos et al., 2021).
Tucker decomposition (Shao et al., 2022) is a widely used tensor factorization method that decomposes high-dimensional tensors into the product of multiple matrices and a core tensor, suitable for low-rank approximation of high-order tensors (Xie et al., 2023). However, it typically does not account for temporal variations and dynamics in the data, and performs poorly in scenarios with high noise or limited data. PARAFAC2 is an extension of PARAFAC, designed to handle time-series data by considering non-stationarity between mode dimensions. However, it still faces challenges in dynamic mode identification, particularly when there are multiple modes or high noise, and especially when there is strong correlation between modes. BTD (Block Term Decomposition) is usually based on covariance matrix decomposition, but it does not fully leverage the temporal autocorrelation information within tensor data. As a result, it struggles to accurately identify dynamic modes, particularly when there are complex temporal dependencies in the data.
Although existing covariance-based methods (Pan et al., 2021) can handle underdetermined problems, they rely on the decomposition of covariance matrices, and the multiple decomposition steps may lead to reduced accuracy, particularly in the presence of high noise or weak mode signals. Additionally, covariance methods are heavily reliant on global feature modeling of the system, making it difficult to effectively capture subtle temporal correlations between modes, resulting in poor performance in complex underdetermined problems. While Bayesian CP decomposition (Giampouras et al., 2022) can automatically select the number of modes and handle underdetermined systems, its effectiveness is limited in cases where modes are strongly correlated or sparse. In particular, when mode signals are weak or data is scarce, Bayesian inference may struggle to accurately identify all active modes. In contrast, the method proposed in this paper enhances mode identification by optimizing autocorrelation, particularly in underdetermined cases where it can effectively reduce noise interference and improve the accuracy of mode parameter identification. Autocorrelation optimization is better equipped to address the limited data problem, improving the accuracy of low-rank tensor decomposition, and ensuring that useful mode features can still be extracted even with insufficient data. Therefore, compared to Bayesian CP decomposition and covariance methods, the proposed method demonstrates stronger robustness and higher identification accuracy in the domain of mode parameter identification for underdetermined systems. This study aims to overcome these limitations by introducing a dynamic tensor construction approach that adapts to data changes and enhances robustness in real-world applications, where non-stationary characteristics are common.
A linear time-invariant underdetermined operating mode parameter identification method based on autocorrelation optimized principal component CP decomposition (APCA-CPD) is proposed. By integrating autocorrelation, Principal Component Analysis (PCA) (Maćkiewicz and Ratajczak, 1993), and CP decomposition (Kolda and Bader, 2009), the method aims to explore and analyze complex structures and dynamic characteristics within multidimensional time series data, thereby enabling better identification of modal parameters. The contributions of this paper are summarized as follows: (1) By calculating the autocorrelation function and identifying its peaks, this method captures the periodic characteristics of the data corresponding to the structure’s natural frequencies. The lag number is then determined from the intervals between these peaks, enabling a more accurate representation of the data’s dynamic structure. (2) To overcome the limitations of static tensor construction, this study proposes a method to dynamically adjust the lag number and tensor dimensions based on the data’s statistical properties. This approach optimizes tensor construction to capture key dynamic features more effectively. (3) In scenarios with limited sensors, traditional multidimensional analysis may not fully utilize the data’s richness. By incorporating the lagged perspective of time-series data, APCA-CPD enhances the data’s information capacity, enabling effective extraction of modal information even with fewer sensors.
The remainder of this paper is organized as follows: “Related Work” provides an overview of operational modal parameter identification for linear time-invariant structures and its connection to CP decomposition. “Proposed Method” details the methodology. “Experimental Results and Discussion” presents datasets, evaluation methods, and results, including comparisons, ablation studies, and noise robustness tests. Finally, the “Conclusion” summarizes the study and discusses future research directions.
2. Related work
2.1. The basic theory of OMA parameter identification for LTI Structures
The core of modal parameter identification lies in transforming vibration differential equations from the physical to the modal coordinate system, thereby decoupling them into multiple independent single-degree-of-freedom (SDOF) systems. In the modal coordinate system, modal vectors are orthogonal and uncoupled, allowing for the determination of key modal parameters—such as mode shapes, frequencies, and damping ratios—using SDOF identification techniques (Fan and Qiao, 2011). For complex structural vibrations, engineering analysis typically simplifies the structure from an infinite to a finite degree-of-freedom system. This study, therefore, uses a multi-degree-of-freedom (MDOF) vibration system as a representative example to address the modal parameter identification problem.
The vibration differential equation of an n-degree-of-freedom (DOF) linear time-invariant system is expressed as follows:

According to the theory of vibration dynamics, the natural frequencies and mode shapes of an n-degree-of-freedom linear system can be obtained using the following equations:

The arithmetic square root of the eigenvalue
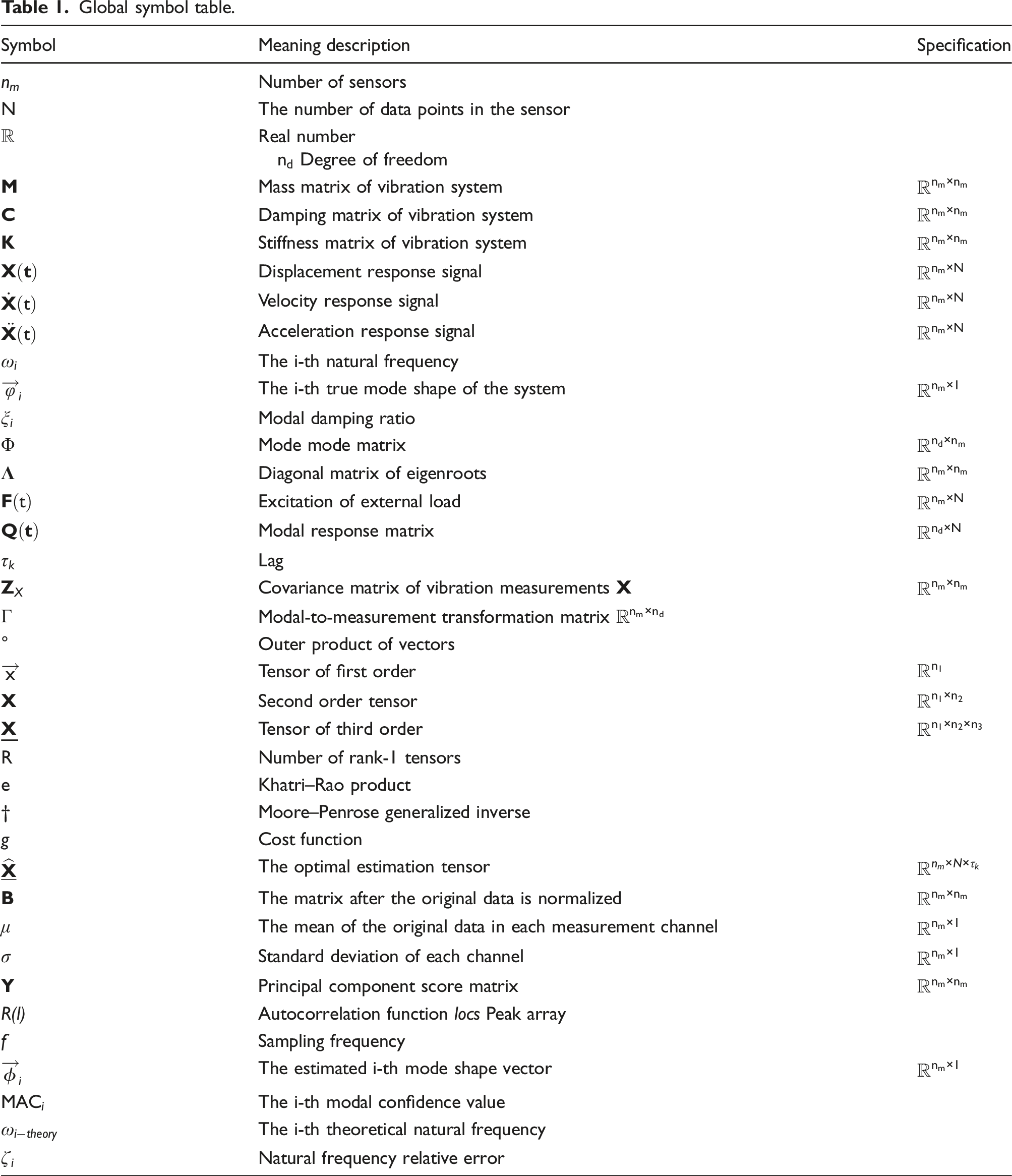
Global symbol table.
2.2. The correspondence between OMA and CP decomposition
Consider a linear, classically damped, lumped-mass structural system with 
The covariance matrix 

Here, 

The elements 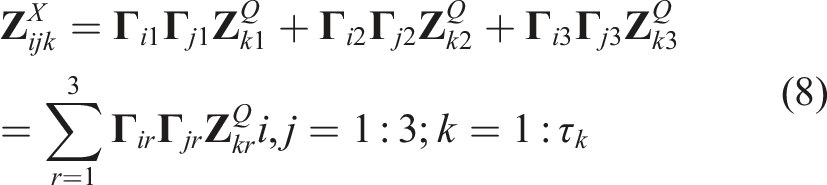

A third-order tensor is primarily decomposed into the sum of the outer products of column vectors from three factor matrices, as shown in Figure 1(b): (a) 2 × 2 × 2 Tensor block representation. (b) Sum of rank-1 tensors.
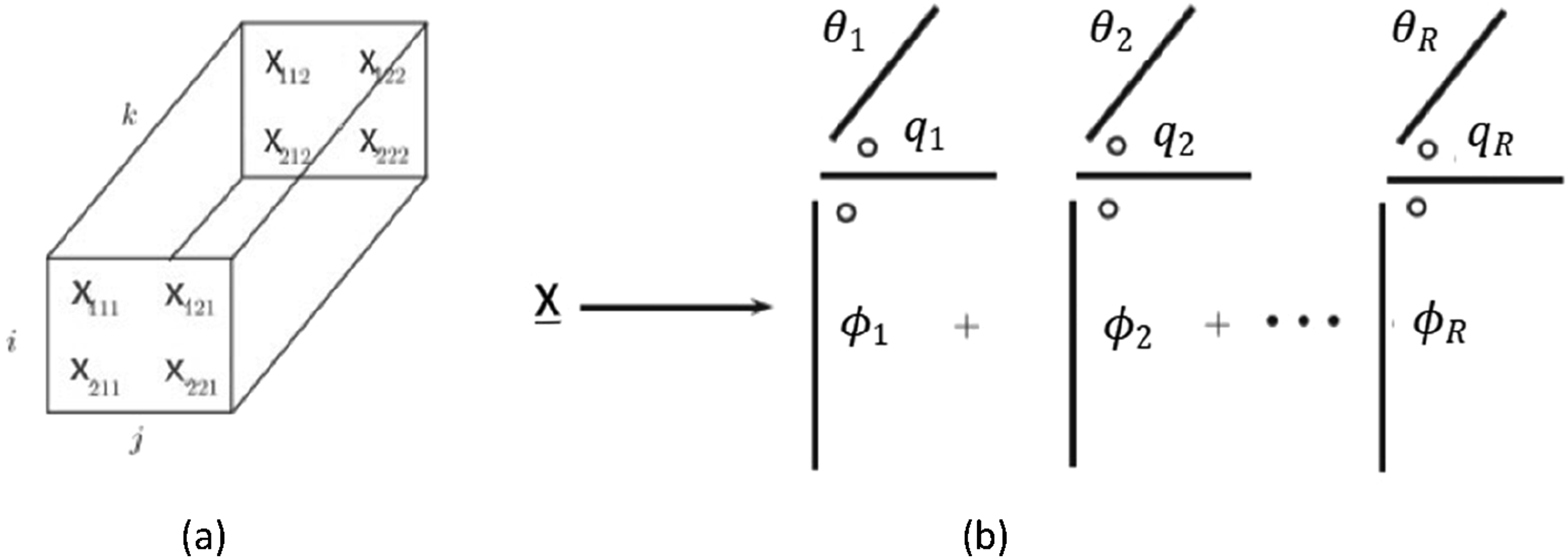
As illustrated in Figure 1(a), in the case where I = J = K = 2, a single tensor 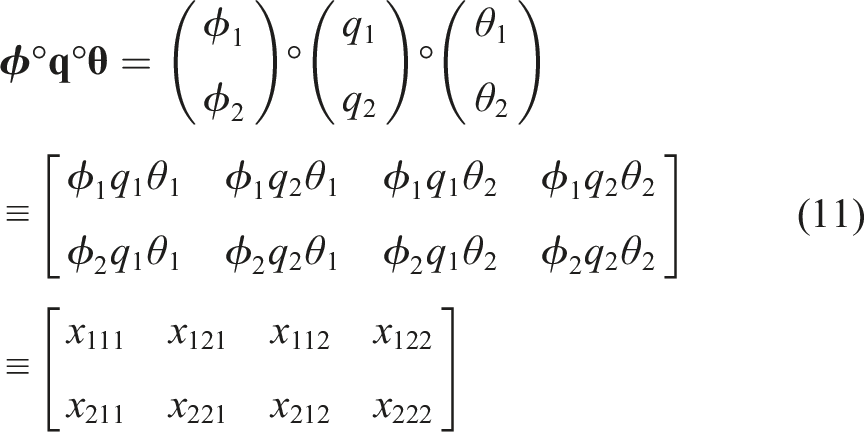
Equation (10) and Figure 1(b) represent the sum of R CP components of a high-order tensor
By observing equations (9) and (10), it can be seen that the two equations are similar. Therefore, the third-order tensor
Through the above brief introduction, the mathematical equivalence between modal identification in the context of operational modal analysis and CP decomposition has been established (Sadhu, 2013).
3. Methodology
First, Principal Component Analysis (PCA) is applied to the matrix
First, standardize the data collected from the sensors:
where
Next, calculate the covariance matrix of the standardized data:
Then, eigenvalue decomposition is performed on the covariance matrix to obtain:
Calculate the principal components to obtain the matrix:
Then, use the significant peaks in the autocorrelation function of the principal components to determine the lag 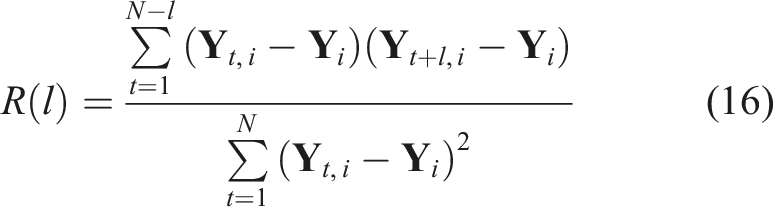
Using the autocorrelation function R(l), the appropriate lag 

Using the determined lag, a time-varying three-dimensional tensor is dynamically constructed, where each “slice” contains the data for a time lag. Let
The construction of the three-dimensional tensor follows these steps: 1) Initialize the tensor: Start by initializing a three-dimensional tensor 2) Lag embedding: For each time lag from 1 to

This tensor construction method allows for flexible adjustment of the lag, dynamically optimizing the tensor’s structure. By utilizing the statistical properties of the data, it captures dynamic, time-dependent features that traditional static tensor constructions might miss. The resulting three-dimensional tensor can capture multichannel data comprehensively while embedding lag along the time sequence dimension (Runge, 2020). This approach is especially effective in extracting modal information from multiple channels, even in challenging scenarios with limited (underdetermined) or noisy data, where traditional methods often fall short.
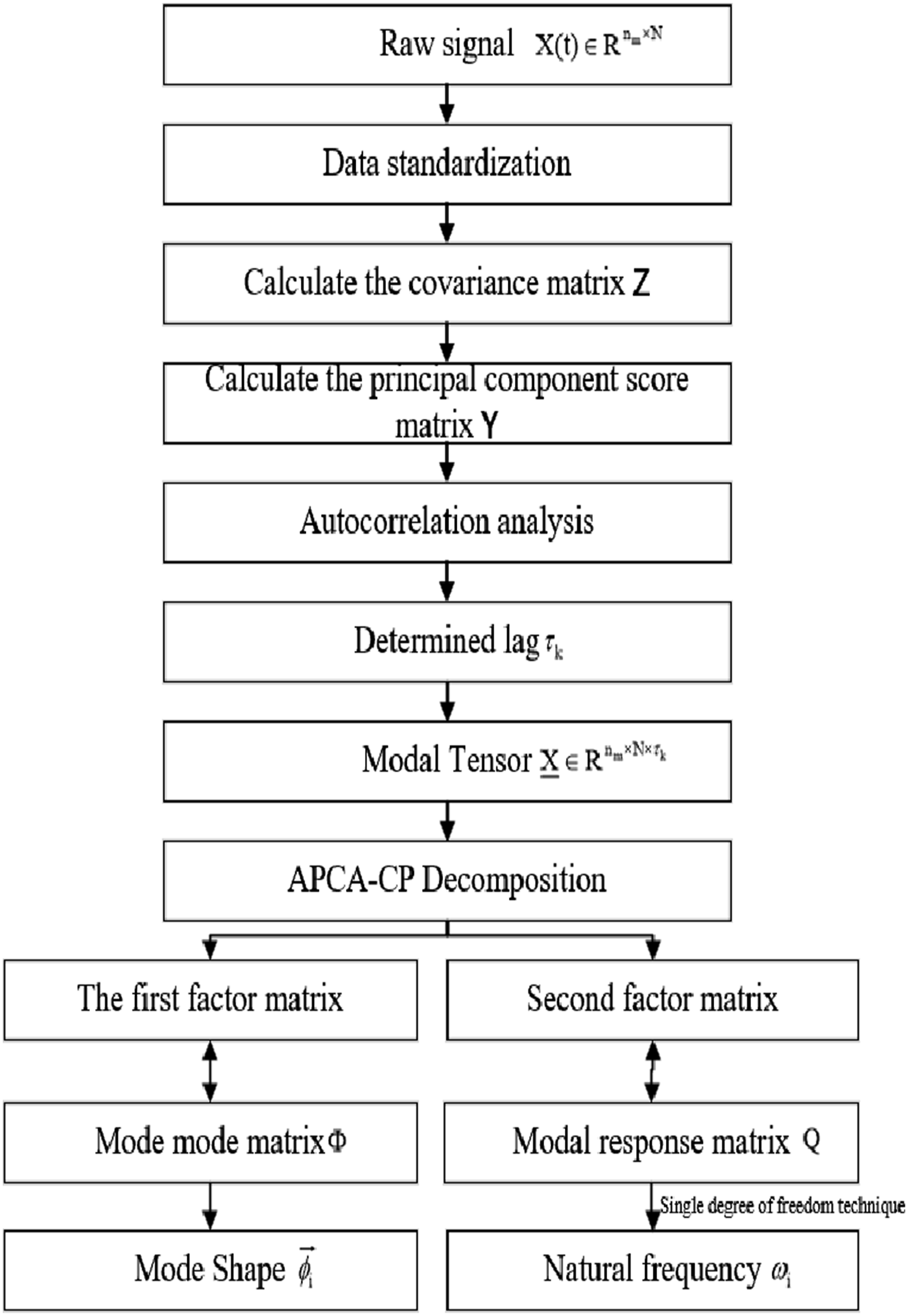
Finally, the constructed three-dimensional tensor undergoes CP decomposition: Flow chart of APCA-CPD method for identifying working modal parameters.
4. Experimental verification
4.1. Dataset introduction
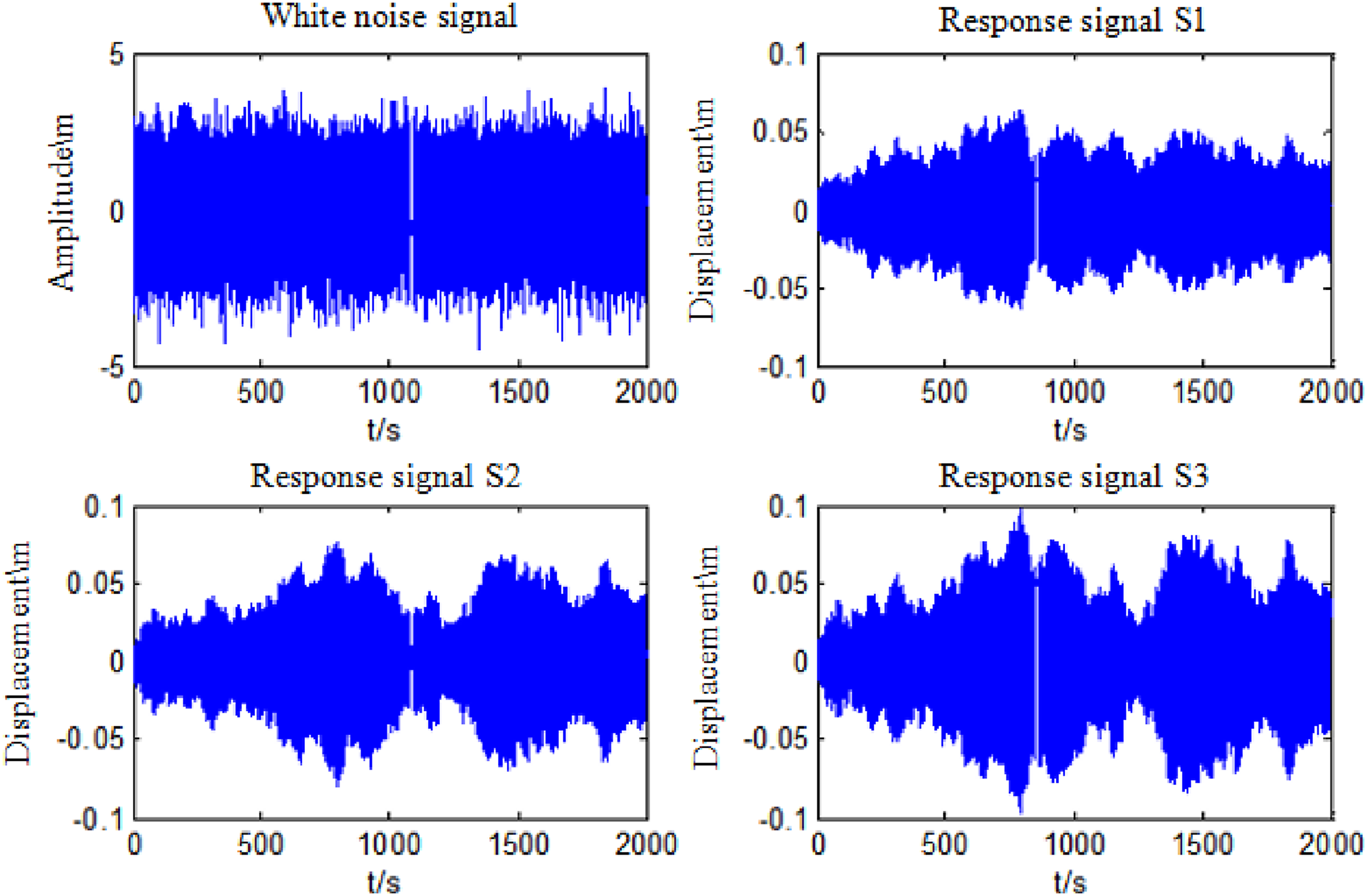
In this study, the linear steady three-degree-of-freedom spring vibration subsystem was used as the data set for experimental verification (Kerschen et al., 2007), hereinafter referred to as Dataset 1 (Figure 3). With the help of Simulink/Matlab platform, the Newmark-β integral method is used to solve the dynamic response of the system, and the time-domain response data of vibration is obtained. The time domain displacement response data obtained by simulation were used for simulation verification. More details of simulation can be found in the literature (Wang et al., 2018) With a sampling interval of 0.005s and a frequency of 20 Hz, the simulation runs for 2000s under initial zero conditions. White noise excitation is applied to mass m1, producing the response signal shown in Figure 4. The parameters are set as follows: m1 = m2 = m3 = 1 kg,k = 1000 N/m for stiffness, and C = 0.01 N.s/m for damping. Sensors 2 and 3 capture the system’s response, creating an underdetermined scenario (i.e., Model of the linear time-invariant three-degree-of-freedom spring-mass system. Gaussian white noise excitation and the obtained response signal.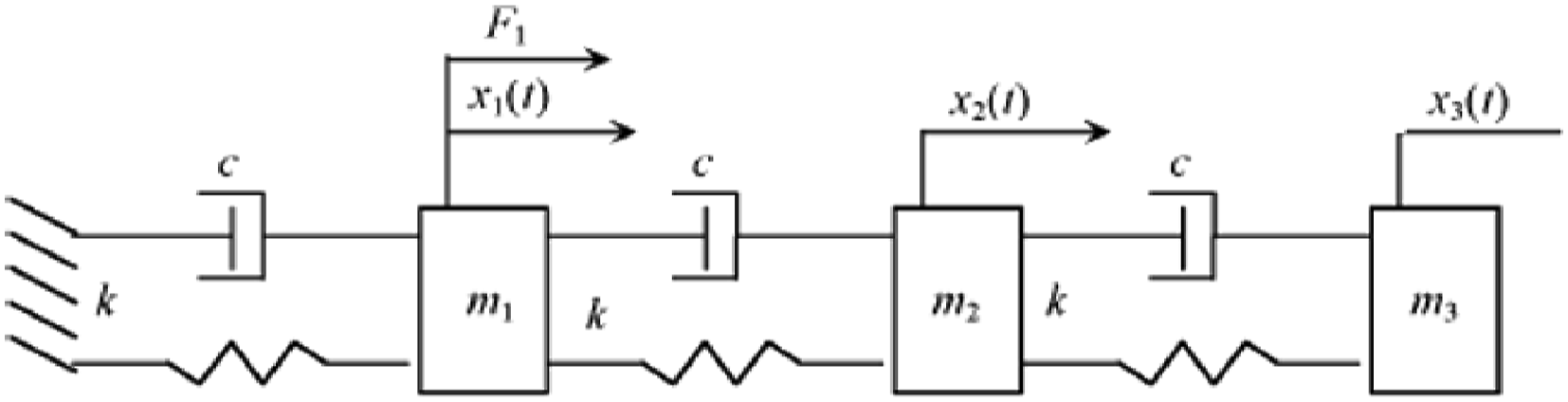
In this study, the experimental structure of a uniform steel cantilever beam was also adopted as the data set (Yang et al., 2013), hereinafter referred to as Dataset 2, which is an experimental device with a vibrating base and five displacement sensors, the size of which is 0.9 × 0.05 × 0.008 m³. The output signals are sampled digitally by DASP (Data Acquisition & Signal Processing) when the sampling frequency is 1600 Hz, and the cut-off frequency for all the five channels is 800 Hz and the diagram of the experimental device is shown in Figure 5 (Yang et al., 2013). The system is stimulated by an impact hammer with a frame number of 8142 frames. For an underdetermined setup, only sensors 1, 3, and 5 are used (i.e., Cantilever beam experimental set.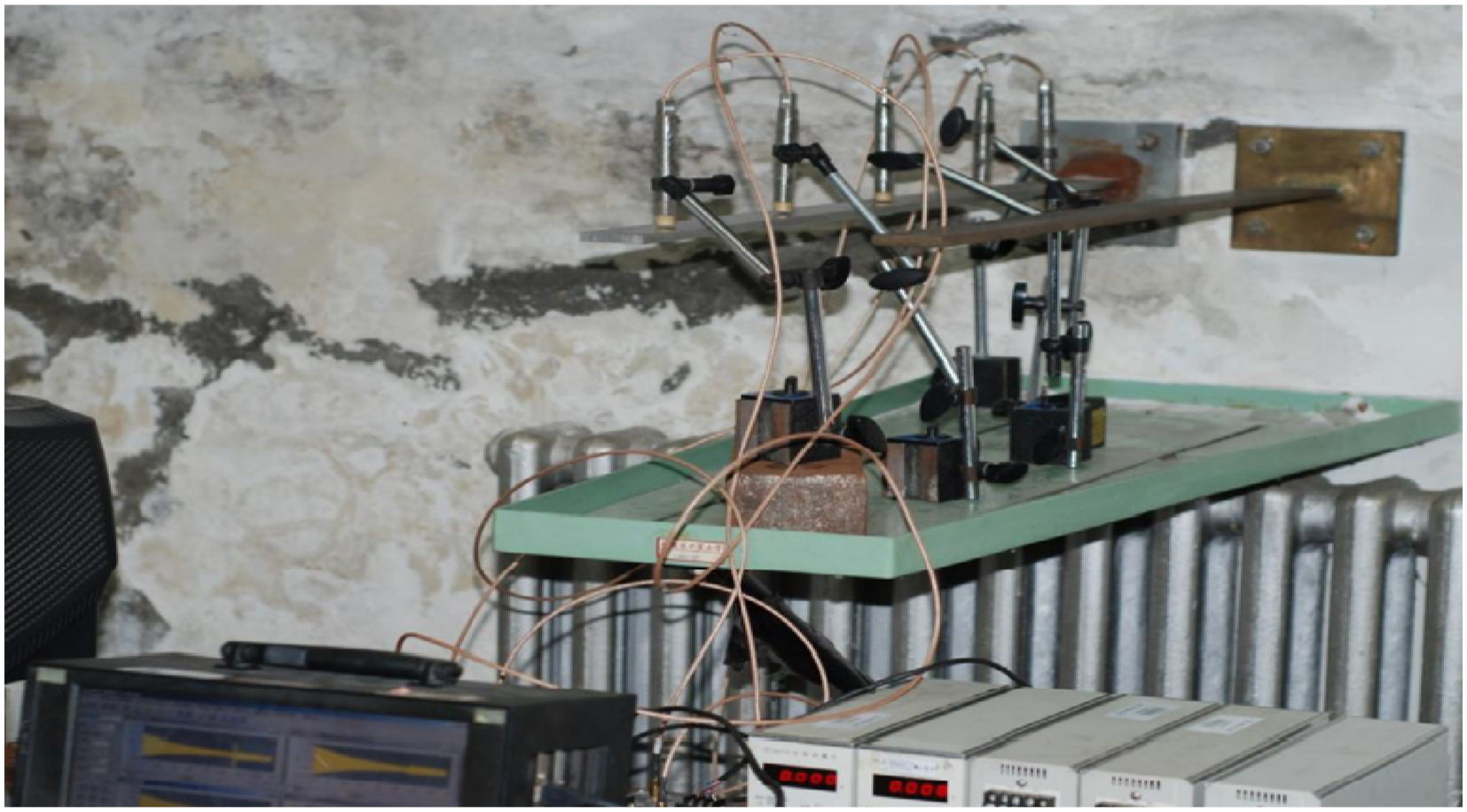
4.2. Evaluation method
To evaluate the accuracy of estimated modal shapes for a time-invariant structure, this study employs the Modal Assurance Criterion (MAC) as shown in equation (21) (Maia and Montalvão, 1997),
Additionally, the identification accuracy of natural frequencies is assessed using the relative error between the identified and theoretical frequencies, calculated as shown in equation (22):
4.3. Contrast experiment
Comparison of MAC values for underdetermined modal parameter identification on Dataset 1.

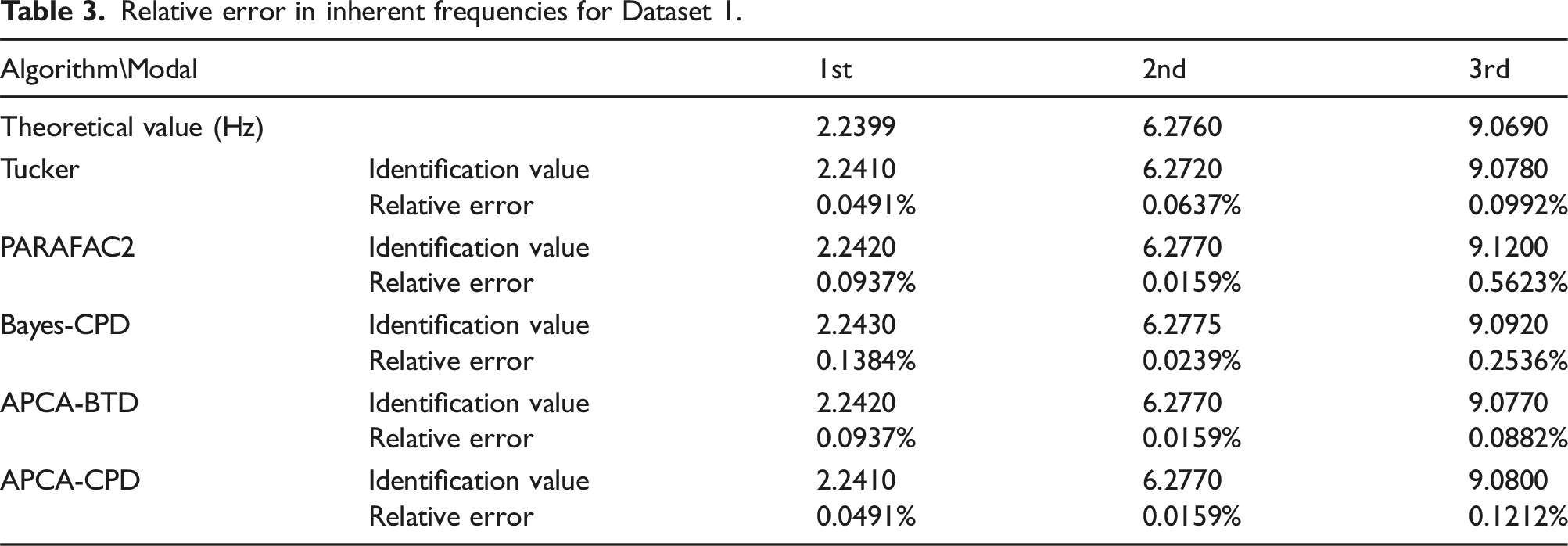
Relative error in inherent frequencies for Dataset 1.
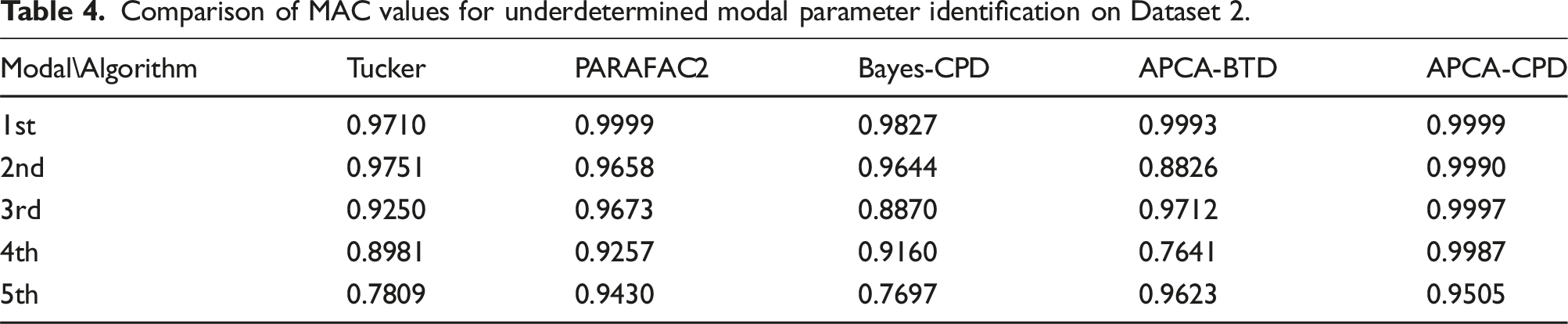
Comparison of MAC values for underdetermined modal parameter identification on Dataset 2.
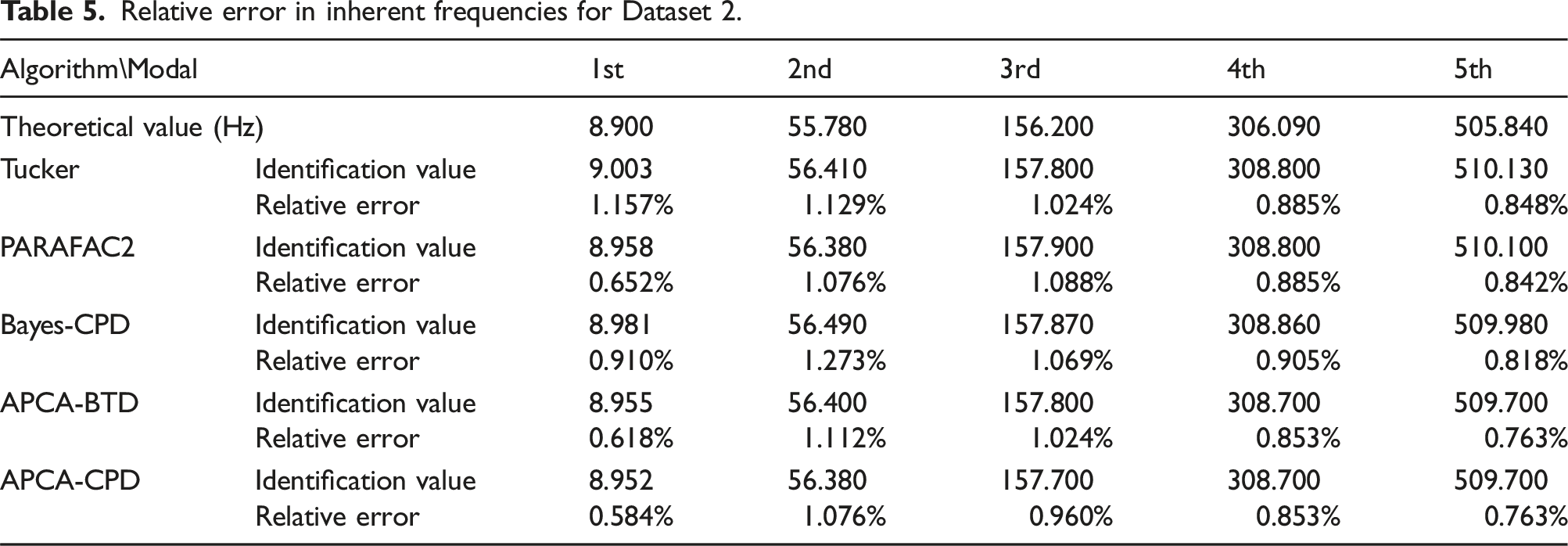
Relative error in inherent frequencies for Dataset 2.
In addition to the quantitative analysis, Figures 6 and 7 provide qualitative comparisons by comparing the modal shapes identified by the APCA-CPD method with theoretical modal shapes (for Datasets 1 and 2). This helps visually assess the accuracy of the algorithm in modal identification. Figure 6 shows the comparison of the APCA-CPD method’s modal shapes with theoretical modes for Dataset 1, while Figure 7 provides a similar analysis for Dataset 2, visually demonstrating the agreement between the proposed method and the theoretical modes. Among them, UCIMS in Figures 6 and 7 represent the Identified Mode Shapes under Underdetermined Conditions. Comparison of identified and theoretical mode shapes on Dataset 1. Comparison of identified and theoretical mode shapes on Dataset 2.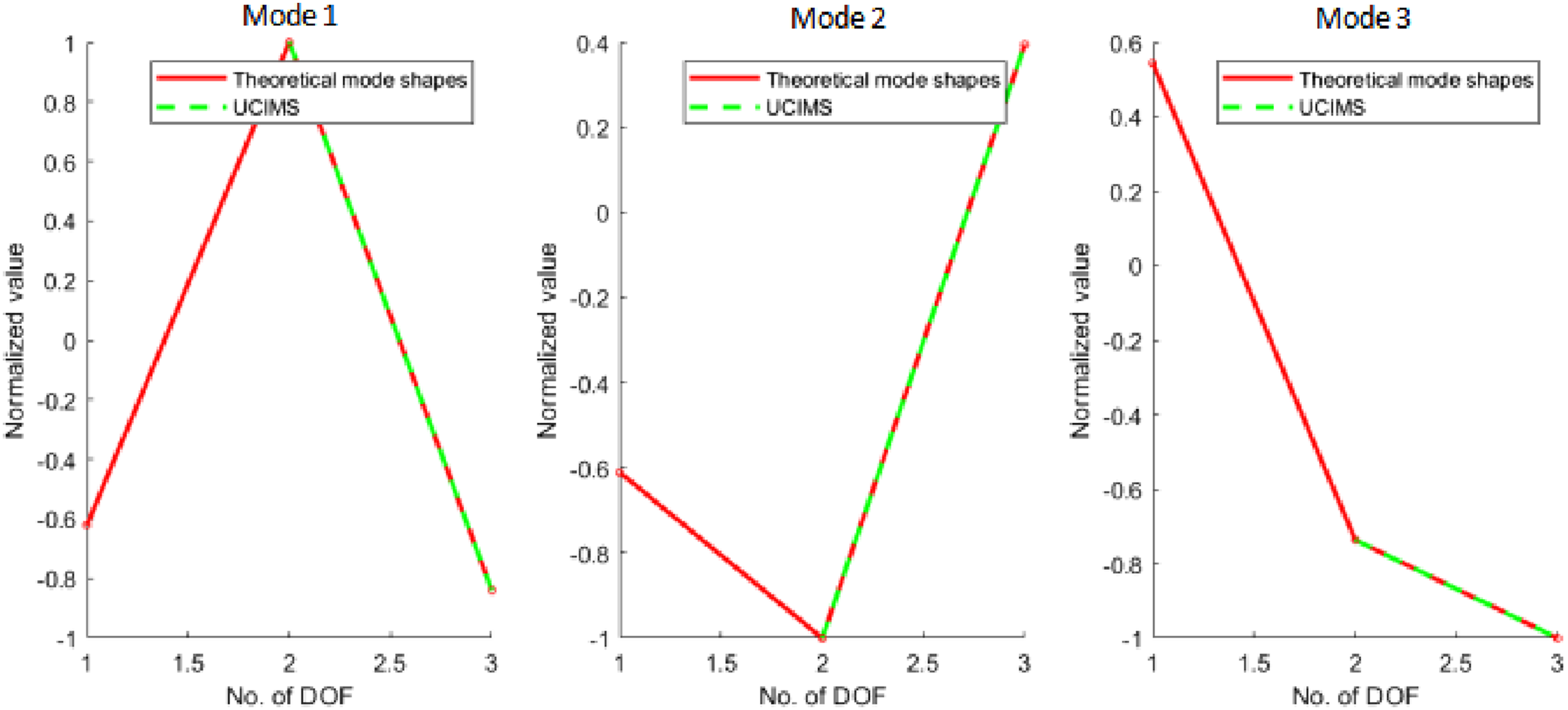
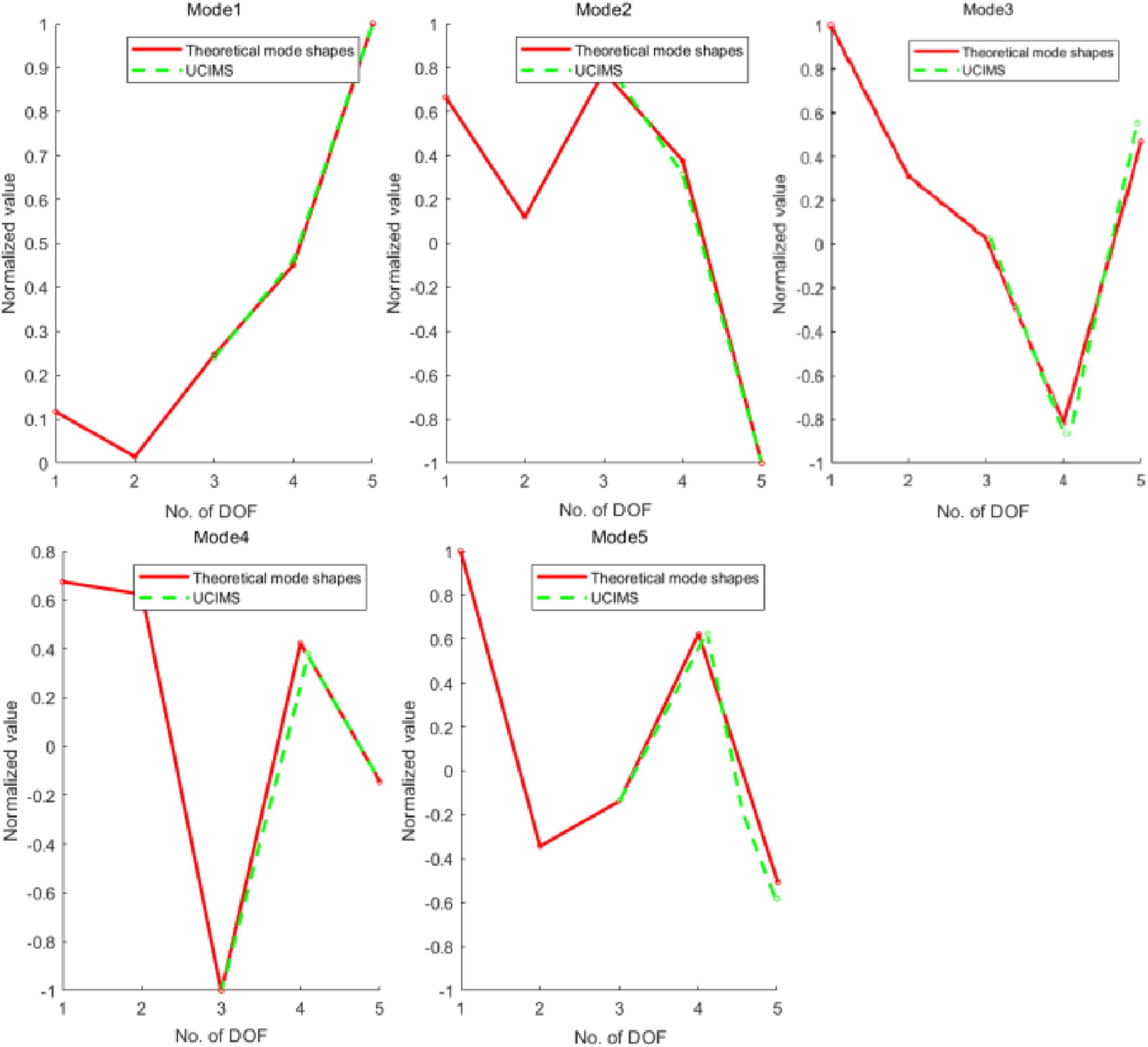
In conclusion, through both quantitative and qualitative comparisons, the results from the two datasets indicate that the APCA-CPD method proposed in this study outperforms other benchmark algorithms in terms of modal parameter identification accuracy, inherent frequency estimation, and modal shape matching, demonstrating its superior performance in addressing underdetermined problems.
4.4. Ablation experiment
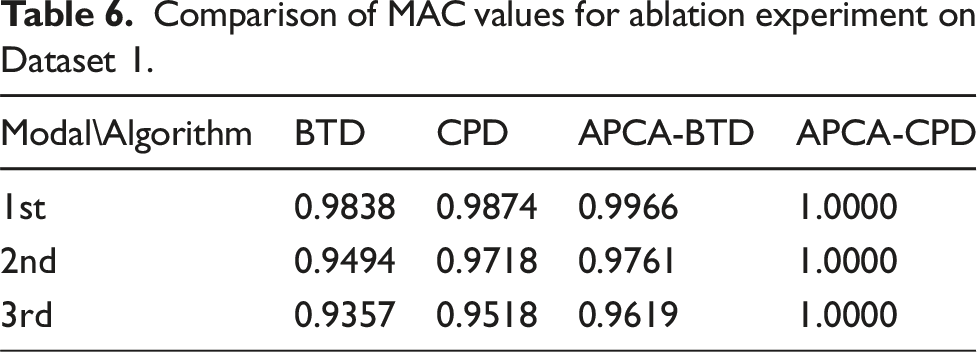
Comparison of MAC values for ablation experiment on Dataset 1.
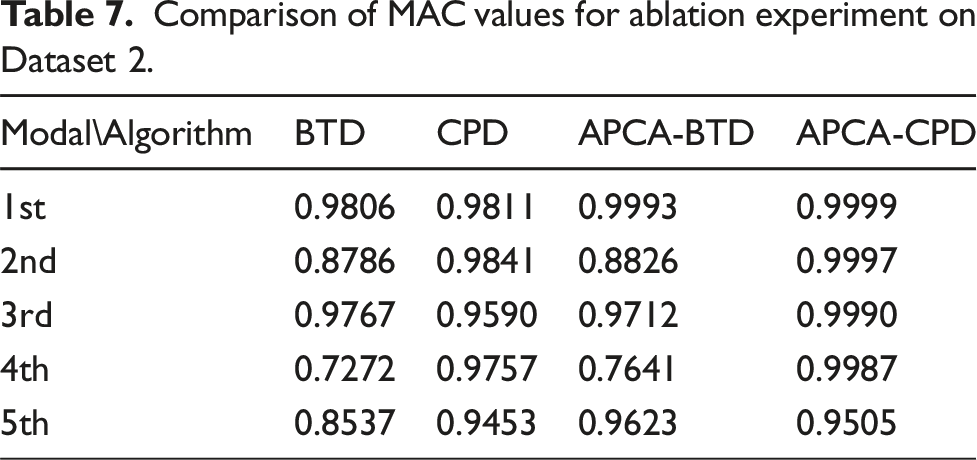
Comparison of MAC values for ablation experiment on Dataset 2.
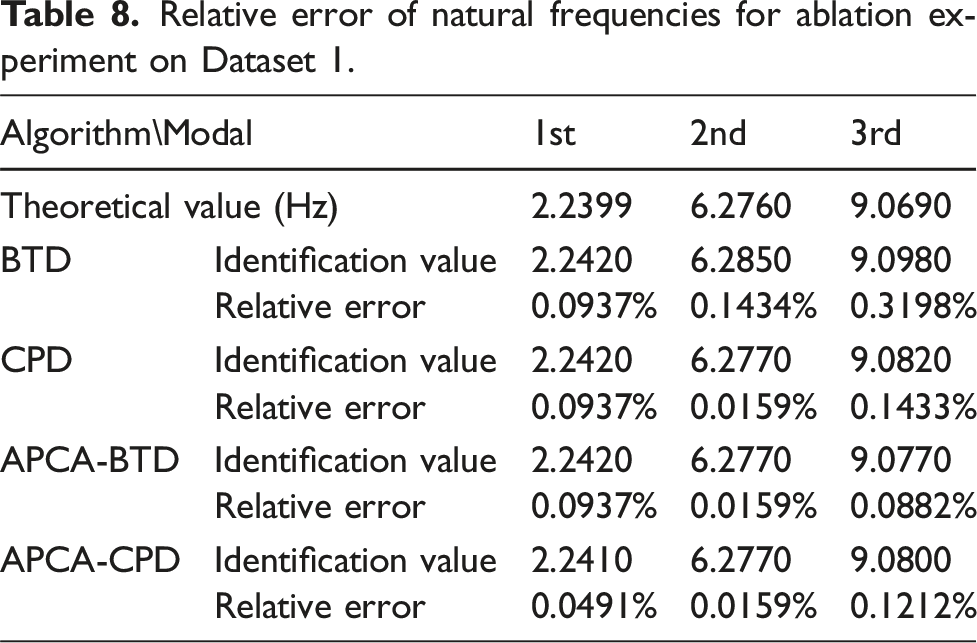
Relative error of natural frequencies for ablation experiment on Dataset 1.
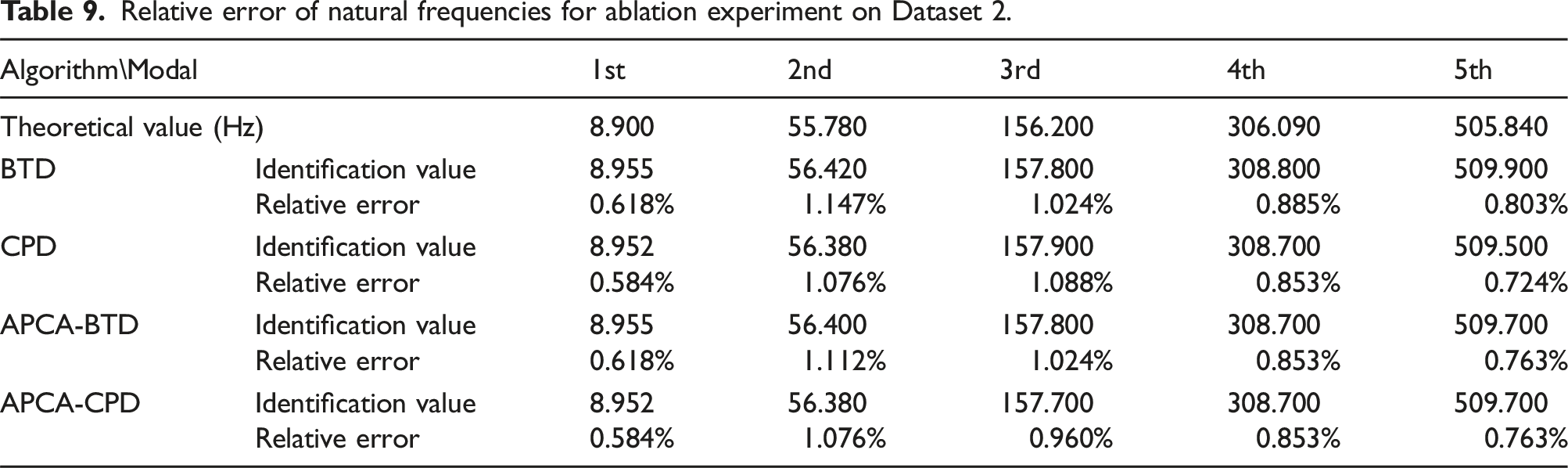
Relative error of natural frequencies for ablation experiment on Dataset 2.
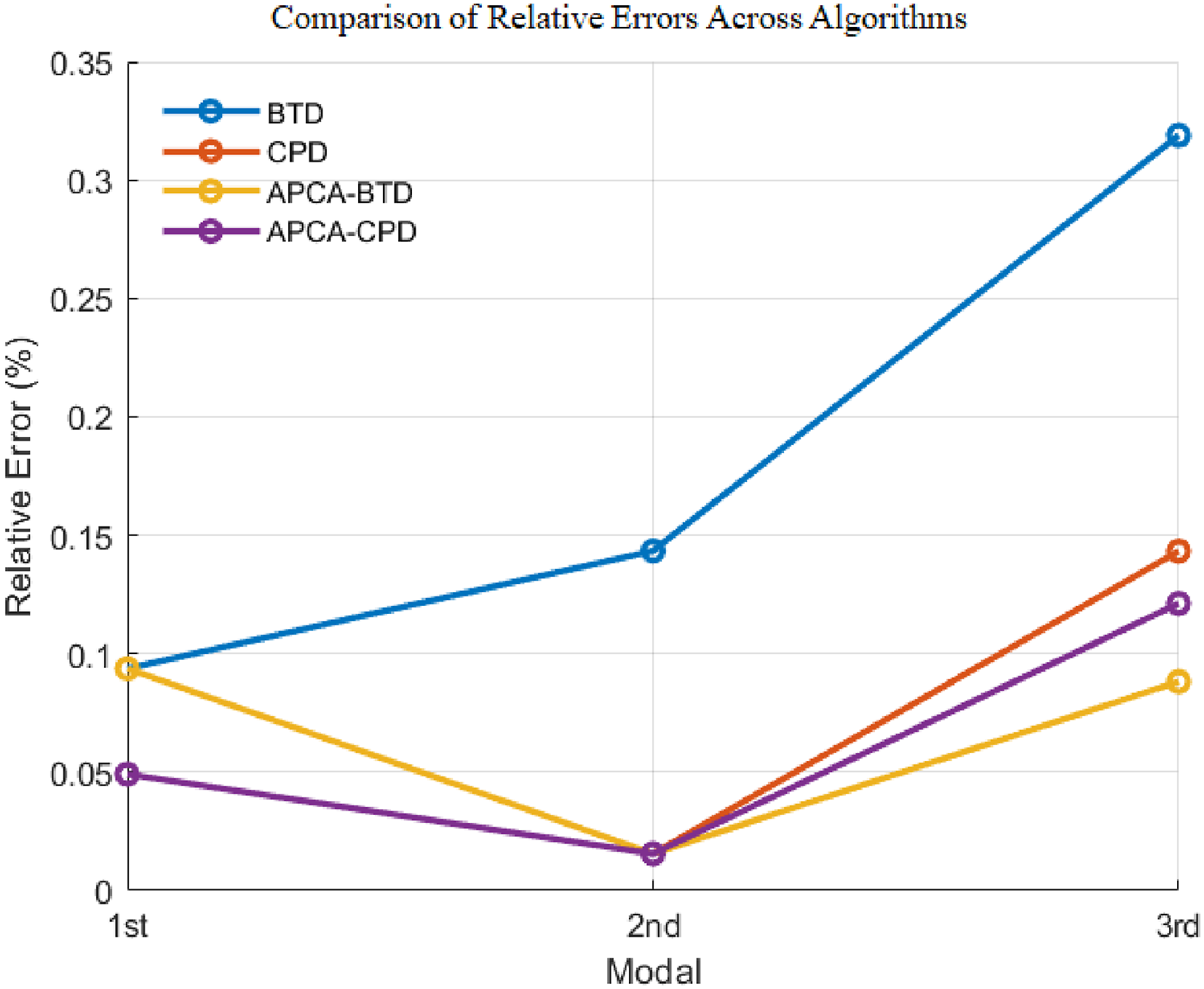
Line graph of natural frequency errors for Dataset 1.
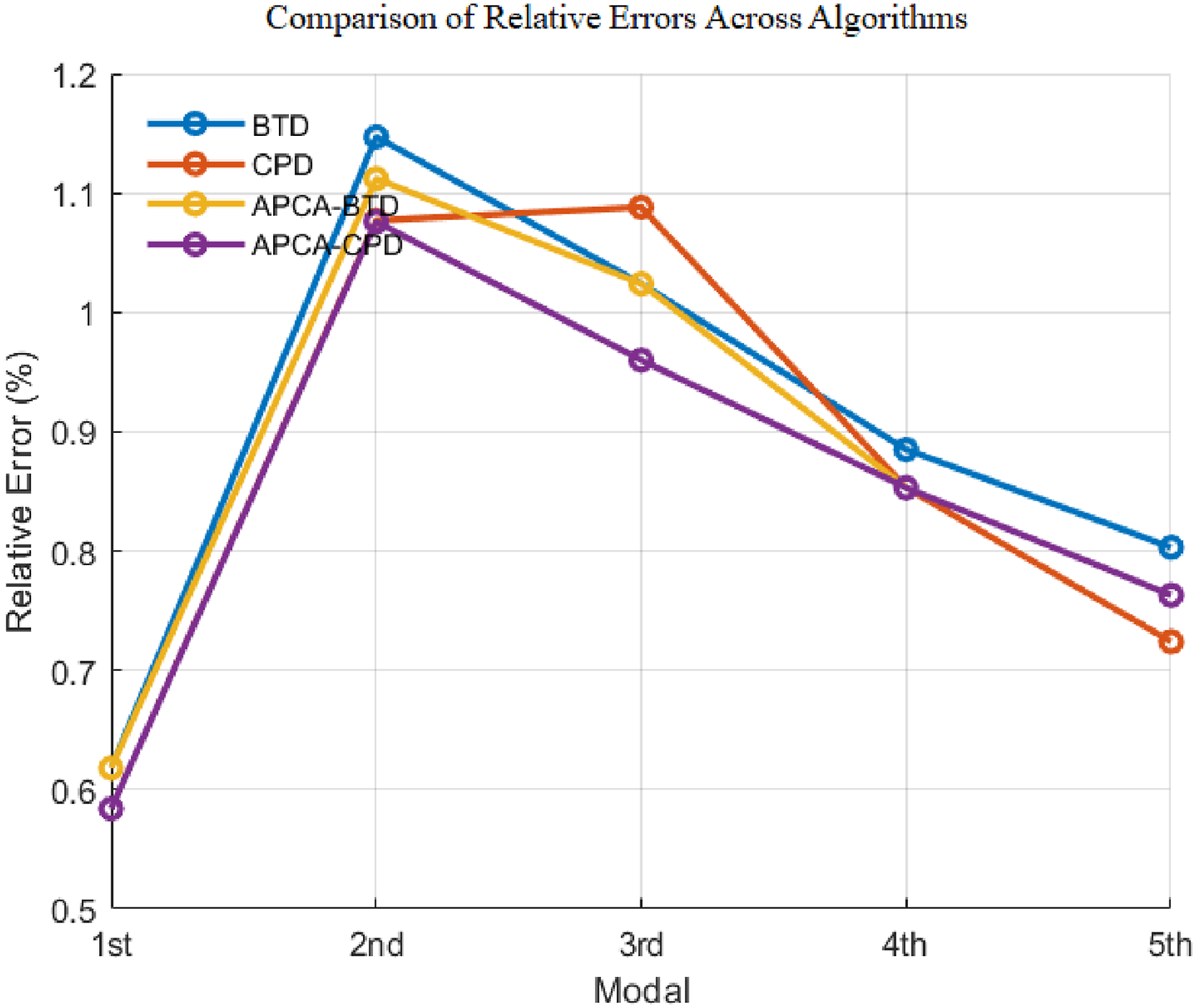
Line graph of natural frequency errors for Dataset 2.
The results of ablation experiments show that the autocorrelation optimization dynamic construction tensor contributes significantly to the model performance. In the absence of autocorrelation optimization, the modal recognition accuracy of the model will be reduced.
4.5. Noise addition experiment
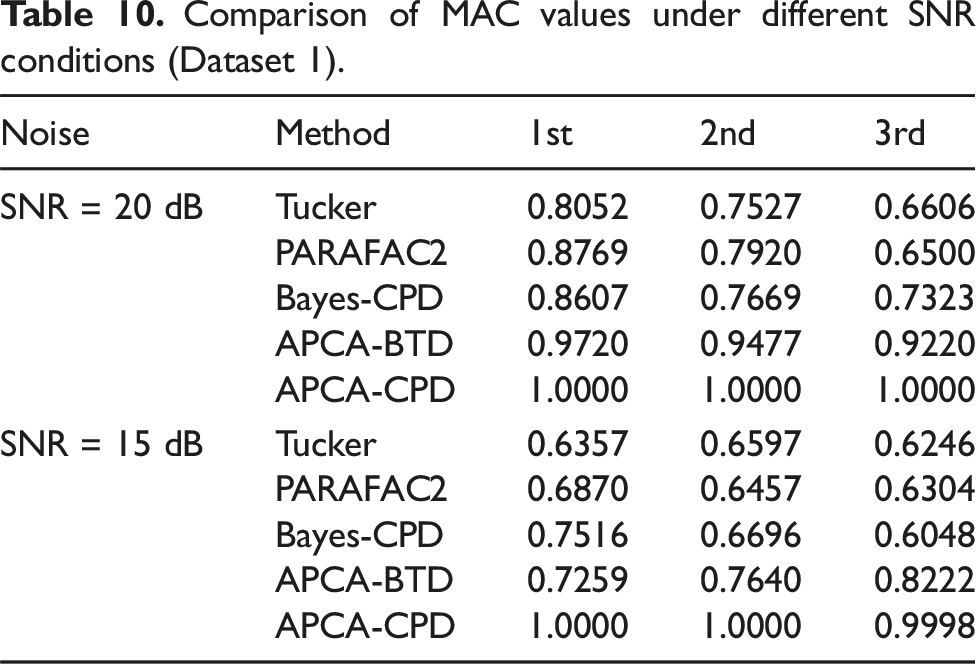
Comparison of MAC values under different SNR conditions (Dataset 1).
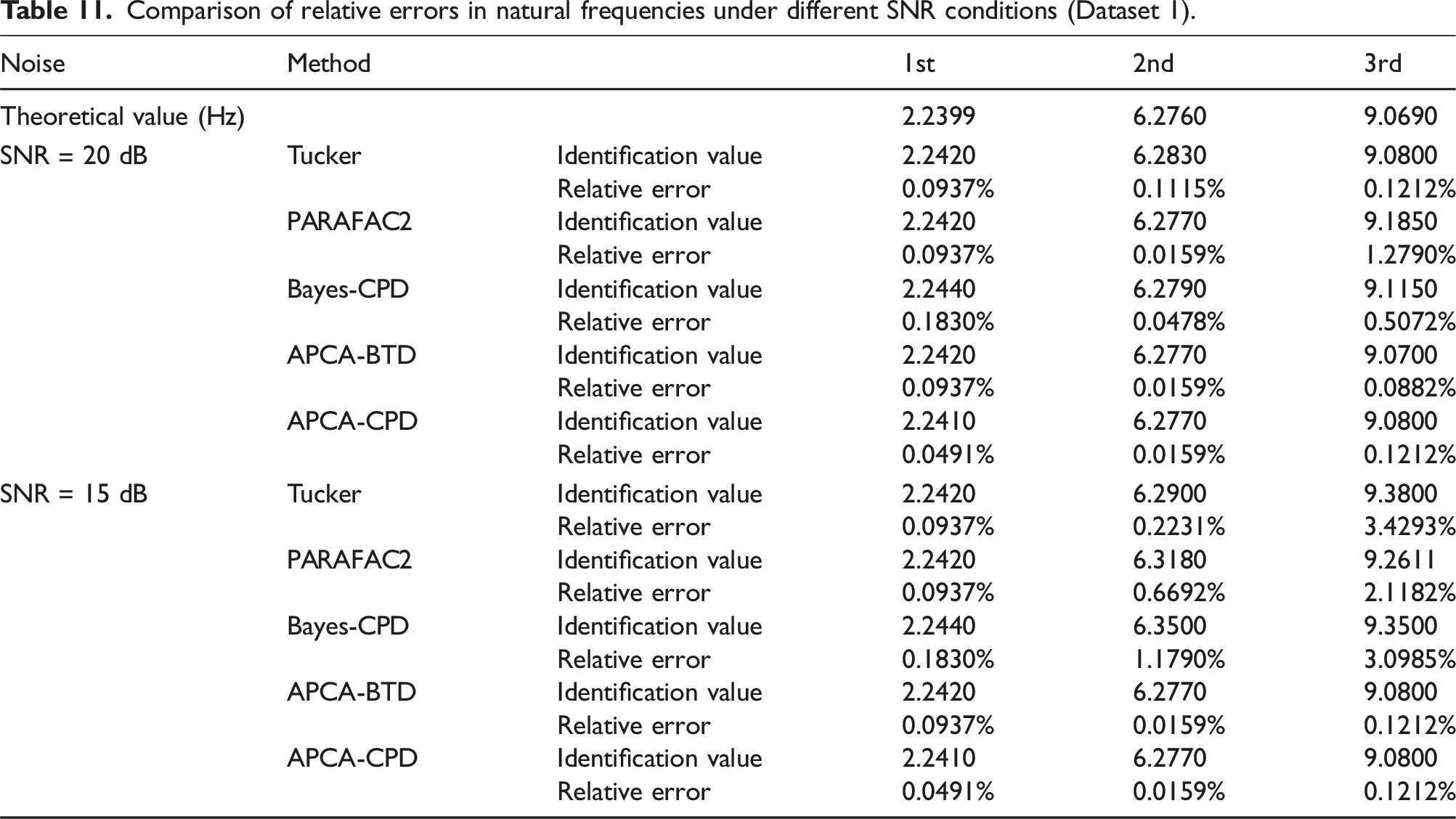
Comparison of relative errors in natural frequencies under different SNR conditions (Dataset 1).
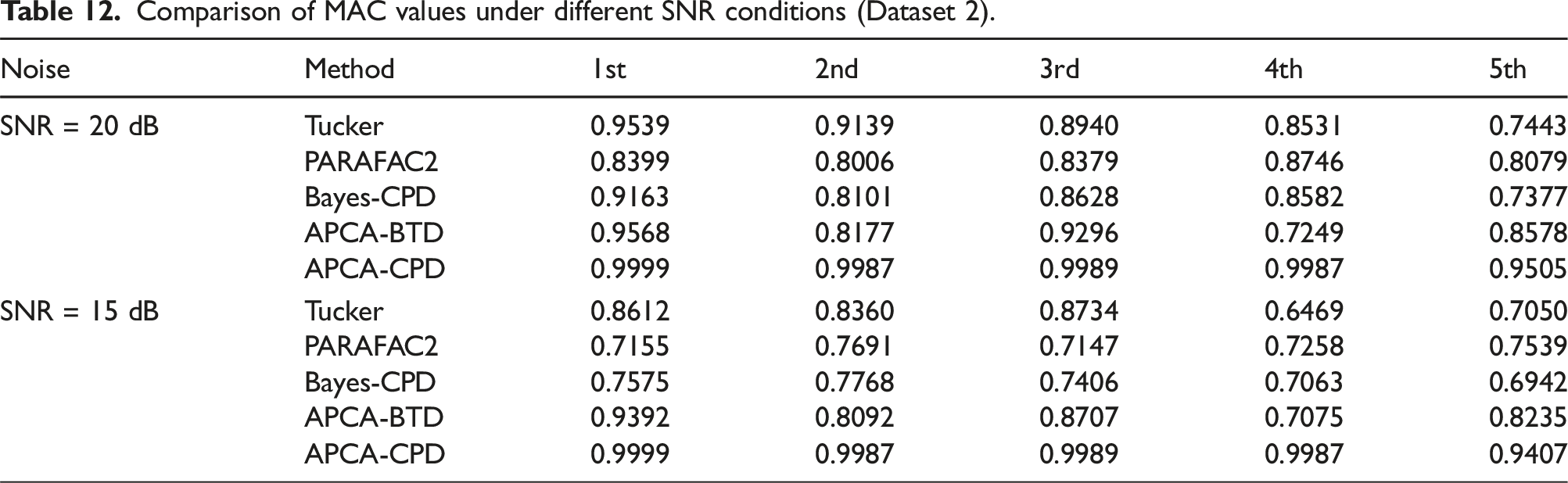
Comparison of MAC values under different SNR conditions (Dataset 2).
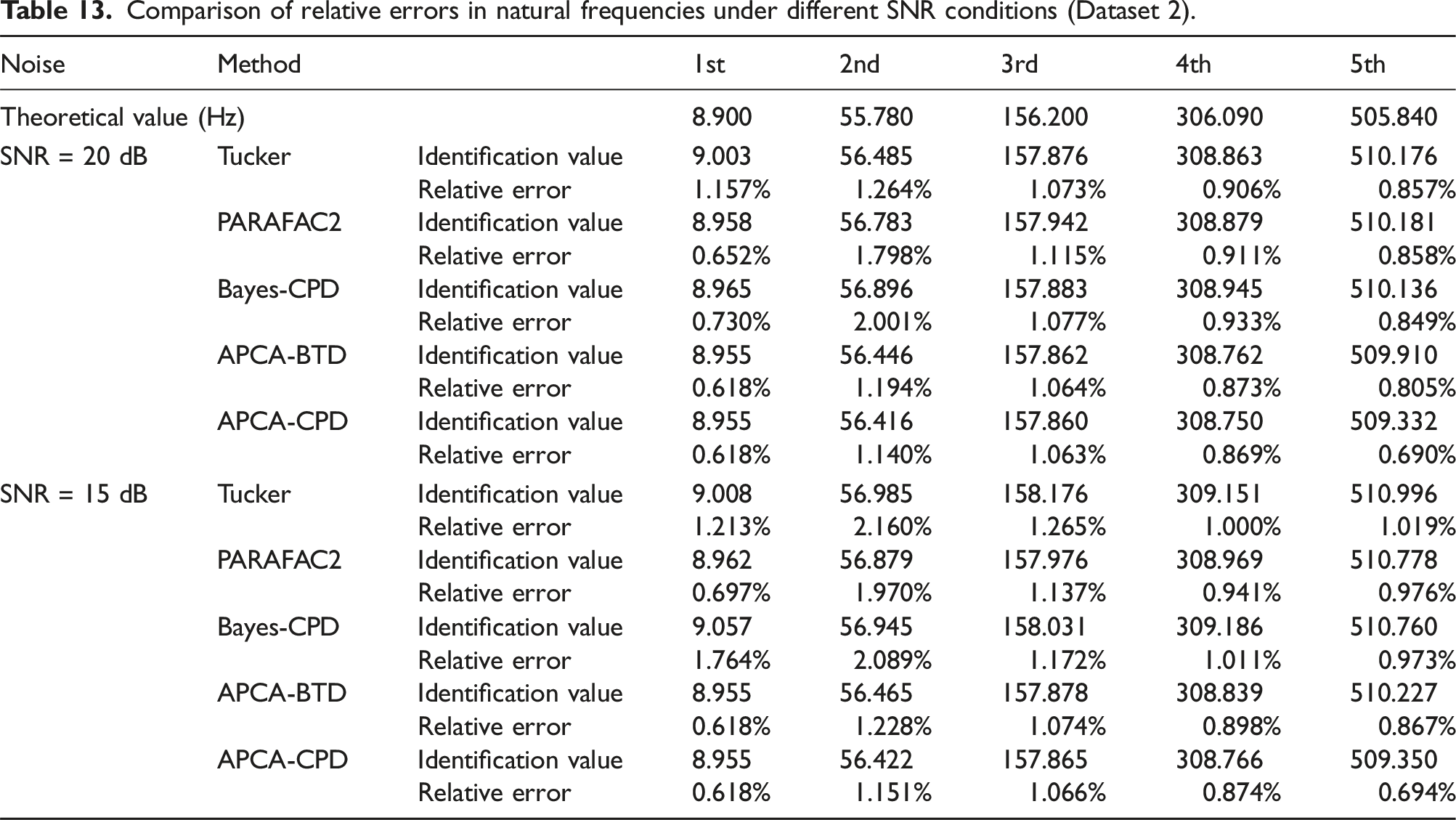
Comparison of relative errors in natural frequencies under different SNR conditions (Dataset 2).
5. Discussion
The experimental results from the comparative analysis, ablation studies, and noise-robustness tests comprehensively validate the effectiveness and advantages of the proposed APCA-CPD method. In comparison to benchmark algorithms such as Tucker decomposition, PARAFAC2, APCA-BTD, and Bayesian CP decomposition, the APCA-CPD method consistently demonstrated superior performance in identifying modal parameters under underdetermined conditions. Specifically, the results from Tables 2–5 highlight its higher MAC values and lower relative errors in natural frequencies across two datasets, showcasing its robustness and reliability in both parameter estimation and modal shape matching. The ablation experiments further revealed that the incorporation of autocorrelation information and dynamic tensor construction significantly enhances the model’s performance. By comparing dynamic and static tensor construction strategies, it was observed that dynamic tensor construction improves the model’s ability to capture modes more accurately, as evidenced by the results in Tables 6–9. Without autocorrelation optimization, the recognition accuracy of the model declines, underscoring the critical role of this feature in handling underdetermined systems. Moreover, noise robustness experiments using Gaussian white noise with different SNRs (Tables 10–13) further validate the method’s effectiveness in noisy environments. The APCA-CPD method maintained near-perfect MAC values and the lowest relative errors even at low SNR conditions (15 dB), whereas traditional methods exhibited significant performance degradation. These findings emphasize the robustness and adaptability of the proposed method to real-world noisy scenarios. In summary, the APCA-CPD method not only addresses the limitations of existing algorithms but also sets a new standard for underdetermined modal parameter identification, offering exceptional accuracy, robustness, and versatility across various datasets and noise levels.
6. Conclusion
This paper presents a method for identifying the modal parameters of linear time-invariant structures, using an approach based on autocorrelation-optimized principal component CP decomposition. In this paper, the basic relation between the identification of operational modal parameters and tensor decomposition is established, and a new method of third-order tensor construction combining time series analysis and multidimensional data processing is introduced. This approach optimizes tensor construction according to the data’s statistical characteristics, making it particularly effective for extracting modal information from multichannel data under underdetermined conditions (where sensor numbers are limited but data richness is high). The method’s effectiveness is validated through numerical simulations and experiments, with results showing stable and accurate identification even in noisy, underdetermined settings.
Future research will focus on developing more efficient ways to determine the tensor decomposition rank R, which significantly impacts identification results, especially under dense modal conditions. Currently, rank selection relies on experimental trial and error, highlighting the need for optimized approaches to choose the best tensor decomposition rank for robust modal parameter identification.
Footnotes
Author contributions
Haonan Chen: Conceptualization, Methodology, Formal analysis, Writing—Original Draft.
Cheng Wang: Data curation, Resources, Writing—Review & Editing, Supervision.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by National Natural Science Foundation of China (Grant No.12372029) and research was supported by Xiamen City Construction Science and Technology Program for the Development and Application of Smart Construction Site Remote Online Real-Time Safety Monitoring System and this work is supported by The Major Science and Technology Special Project of Fujian Province (grant nos.2024HZ022013).