
Abstract
Locomotive wheel bearings are prone to failure under harsh service conditions. Sparsity indexes which can evaluate the impulsive characteristics of bearing fault feature have been widely utilized in the signal processing methods. In recent years, sparsity indexes-based methods have been extensively criticized due to their high sensitivity to the random impact component. Although the feature extraction methods using the filtering framework can alleviate this issue, they still hardly achieve much in terms of the complex frequency spectrum, especially when the frequency bands of the fault and the interference information are mixed. To solve the problem, this paper proposes a robust impulse feature extraction method using dual-domain separation. Initially, the feature distinctions of the fault impulse and random impact component in the second-order amplitude-frequency (SAF) domain are explored in this paper. Subsequently, based on the distinctions, the dual-domain separation technique is performed in both the SAF and frequency domains, achieving the effective removal of random impact component. The performance of the methods including sparsity indexes-based gram, deconvolution, and decomposition methods is enhanced by using the proposed method. Finally, the strong robustness characteristics against random impact component are validated through simulation and experiment data from the locomotive wheel bearing.
Keywords
1. Introduction
Wheel bearings play a vital role in running parts of locomotive (Wei et al., 2019). In the process of railway transportation, wheel bearings are often in high speed and heavy load conditions, which make the components of the bearing prone to localized faults (Ji et al., 2025b; Miao et al., 2023). The condition of the wheel bearings is often directly related to the performance and safety of the locomotive. Therefore, the fault diagnosis of locomotive wheel bearings is of great significance in preventing failures and ensuring safe operation (Ji et al., 2025a; Jiang et al., 2023; Lu et al., 2018; Miao et al., 2024).
Sparsity indexes have received extensive attention (Chen et al., 2019; Chen and Zuo, 2022) due to the advantage of characterizing the distribution of signal energy. Generally, the sparsity indexes are used to describe the concentration degree of signal energy. In the machinery fault diagnosis area, the sparsity indexes can effectively measure the impulsive characteristics of the signal. With this outstanding advantage, the sparsity indexes not only serve as a criterion for locating the ideal frequency band in the spectral kurtosis methods (Moshrefzadeh and Fasana, 2018; Wang et al., 2022b) but also guide the feature extraction direction as an objective function for both the deconvolution methods (Cheng et al., 2019; Liang et al., 2021) and the decomposition methods (Miao et al., 2019, 2025; Zhang et al., 2018).
Research on sparsity indexes-based methods has been fairly comprehensive. Kurtosis, initially proposed by D. Dyer (Dyer and Stewart, 1978), has extensively been utilized in the extraction of machinery fault features and has emerged as a pivotal measure of sparsity. The method with kurtosis as the objective function, minimum entropy deconvolution (MED), has gained widespread application in the diagnosis of bearing faults due to its advantage in highlighting the impulsive characteristics of fault signals in the time domain (Wiggins, 1978). Later on, various time-domain sparsity indexes-based methods have emerged (Jia et al., 2017; Miao et al., 2022a; Wang et al., 2020; Xu et al., 2019a, 2019b). However, the above methods only consider the waveform characteristics of the fault impulses and perform poorly in evaluating the cyclo-stationary behavior of repetitive transients caused by bearing faults (Buzzoni et al., 2018). Subsequently, this cyclo-stationary behavior was shown to cause discrete and distinct peaks at the corresponding fault frequencies in the envelope spectrum (ES) (He et al., 2021), making ES-domain indexes more informative to compensate for the shortcomings of time-domain indexes. Since then, many excellent indexes have been constructed from the ES domain to improve the traditional methods (Deng et al., 2024; Hashim and Shakya, 2023; Shi et al., 2024; Wang et al., 2022a; Xu et al., 2021; Zhang et al., 2021).
Nevertheless, due to the inherent high sensitivity of sparsity indexes to random impact component (Xu et al., 2016), these aforementioned sparsity indexes-based methods lack robustness against such interference signals. To address this issue, some scholars have conducted thorough research on the characteristics of fault signals, incorporating periodicity into the improvement of sparsity indexes. McDonald et al. McDonald et al. (2012) considered both the impulsive and periodic characteristics of fault signals, and ingeniously amalgamated the periodicity into kurtosis, thereby proposing the concept of correlation kurtosis (CK). Similarly, Xu et al. Xu et al. (2015) introduced the harmonic-to-noise ratio to augment the proficiency of the Kurtogram method in extracting periodic characteristics from fault signals. Liu et al. (2021) utilized periodicity indexes to accentuate the periodic impulses, which enhanced the capability of the Kurtogram method to discern cyclic stationary components. These approaches have effectively facilitated the comprehensive extraction of fault impulse characteristics.
However, these methods require precise prior knowledge of the fault period (Miao et al., 2017). Without the prior information, their performance will be significantly compromised. In addition, faced with the issue of the complex frequency spectrum that usually occurs, especially when the frequency bands of the fault and the interference information are mixed, the aforementioned methods based on the filtering framework often struggle to provide a solution (Chen et al., 2025).
Therefore, to address the challenges outlined above, this paper proposes a robust impulse feature extraction method using dual-domain separation (DDS). Initially, the distinct separation feature is demonstrated between the fault impulse and the random impact component from the second-order amplitude-frequency (SAF) spectrum. Subsequently, leveraging the identified separation feature, a band-stop filter is applied within the SAF spectrum to thoroughly eliminate fault-related information while maintaining random impact component. Then, the frequency spectrum is obtained by performing an inverse Fourier transform (IFT) on the SAF spectrum after band-stop filtering. Finally, a difference operation is conducted between this derived spectrum and the initial spectrum to remove the shared random impact component, thereby retaining the fault information. The main contributions of this article are outlined below: 1. The disadvantage of the sparsity index-based methods which are highly sensitive to random impact component is thoroughly overcome without affecting the extraction ability of the bearing fault impulse. 2. The challenging issue of the filtering framework-based methods, which are troubled by the complex frequency spectrum, especially when the frequency bands of the fault and the interference information are mixed, is successfully solved. 3. The proposed method offers a potent alternative for enhancing the different filtering methods, including the sparsity indexes-based gram, deconvolution, and decomposition methods.
The structure of the remainder of this paper is as follows. Section 2 succinctly outlines the two challenges encountered by existing methods based on sparsity indexes. Section 3 is dedicated to detailing the development process of the method put forth in this paper. Section 4 assesses the efficacy of the proposed method and examines its resilience to random impact component. Section 5 utilizes locomotive wheel bearing experimental data of compound faults for verification. Finally, Section 6 concludes the findings of this paper.
2. Review of current issues
Nowadays, although the methods based on sparsity indexes show good performance, some issues still exist in practical applications. In the following two subsections, this paper addresses two typical issues in detail to demonstrate the challenges they pose to the existing methods.
2.1. Sensitivity to random impact component
To illustrate the sensitivity of sparsity indexes to random impact, this paper selects kurtosis, D-norm, and the Hoyer measure as the subjects for analysis. The specific expressions of these three indexes are shown as follows:



Subsequently, this paper constructs the periodic impulses and a single random impact signal with a time-domain amplitude maximum of 1. Since the energy of the signal is considered to be associated with its amplitude, this paper simulates different signal energies by singularly adjusting the amplitude of the signals while keeping other parameters constant. Subsequently, the normalized calculated values of the three indexes for the two signals under varying amplitude are depicted in Figure 1. From the results, it can be observed that the outcomes of the three indexes for the random impact signal are consistently greater than those for the periodic impulses. This indicates that the three sparsity indexes are highly sensitive to random impact component and, therefore, the methods based on these sparsity indexes are destined to exhibit such susceptibility. The normalized calculated results of the indexes under different amplitude of the signals.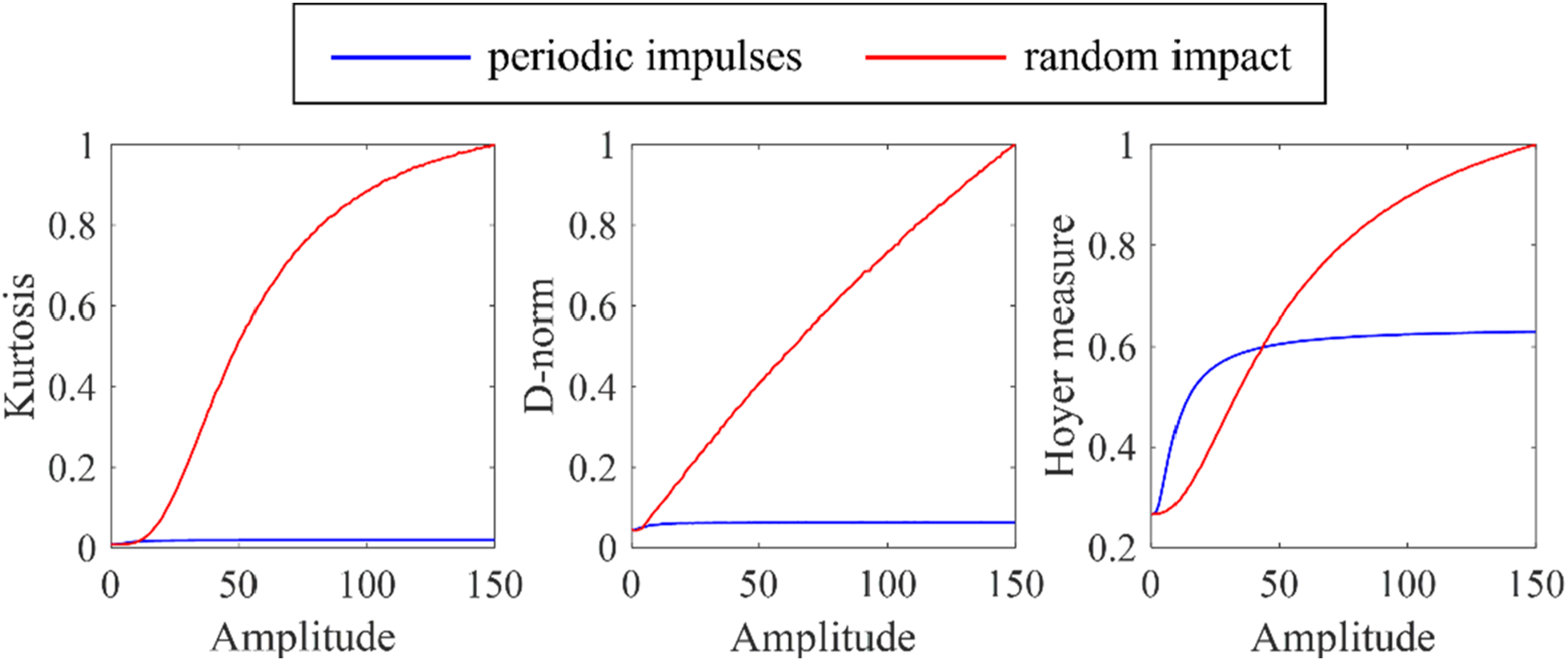
2.2. Challenge of handling complex frequency spectrum issue
Most of the existing sparsity indexes-based methods rely on the filtering framework to realize fault feature extraction (Miao et al., 2022a; Wang et al., 2022a; Xu et al., 2021). However, these filtering framework-based methods are challenged in terms of the complex frequency spectrum especially when the frequency bands of the fault and the interference information are mixed. This is because the fundamental mechanism of filtering entails the application of a window function within the frequency domain (Lei et al., 2011), which serves to attenuate spectral components that lie outside the bandwidth encompassed by the window. Consequently, when the bands of two signals are mixed, the act of windowing during the isolation of the fault impulse frequency spectrum inadvertently encompasses the interference spectrum as well. This inherent limitation presents a significant challenge in achieving effective separation of interference component.
Figure 2 presents the separation under mixed frequency bands for two signals. It can be observed from the results that the filtering framework-based methods are struggling to achieve the separation of the interference component when the bands of the fault and the interference information are mixed. The separation under mixed frequency band for two signals: (a) the spectrum before filtering and (b) the spectrum after filtering.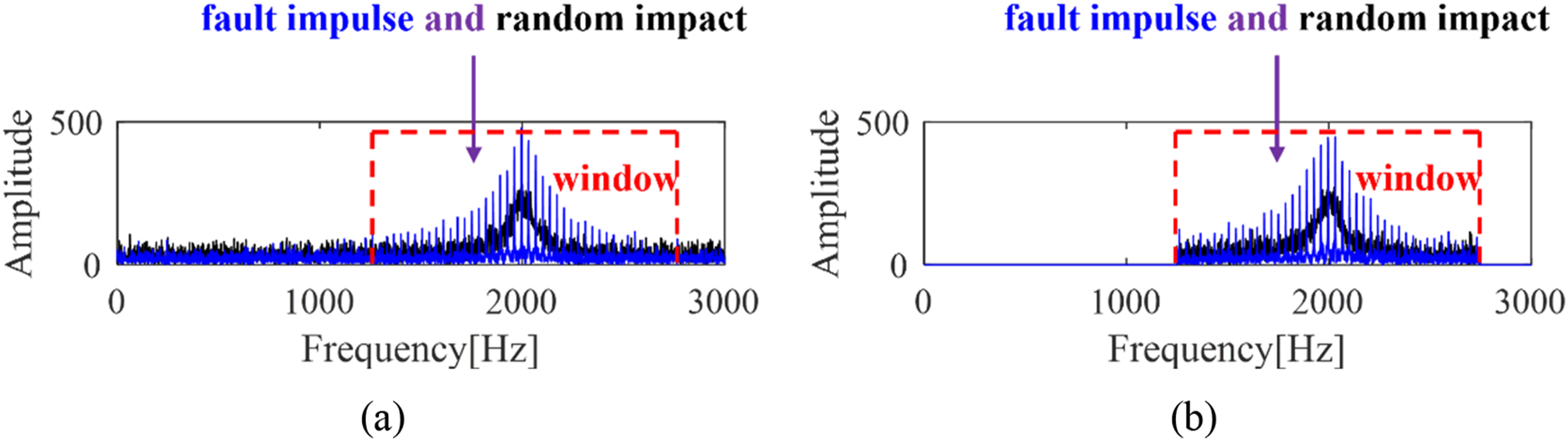
3. Proposed method
Motivated by the aforementioned issues, this paper proposes a robust impulse feature extraction method using dual-domain separation to offer a solution. By exploring the feature distinctions of the fault and random impact component and employing the separation technique in different domains, the complete separation of the interference component can be achieved. The specific construction of the method is detailed in the following subsections.
3.1. Feature distinctions
The bearing fault signals usually exhibit periodic impulse characteristics. During the study of the fault features across different domains, Barszcz and JabŁoński (2011) found that periodic impulses in the time domain also manifest as a series of periodic impulses in the frequency domain. This paper conducts further research on the SAF domain, which is obtained from the Fourier transform of the frequency domain, and explores the feature distinctions of the fault and random impact component in the SAF domain. The relevant derivations are as follows.
To begin with, the fault signal which behaves in periodic impulses is simplified to the Dirac comb function (Xu et al., 2021):

The Fourier transform of

From (5), it can be observed that
To further explore the fault feature, the Fourier transform is conducted again to obtain the double Fourier transform of

From (4) and (6), it can be found that the expressions of
Therefore, the conclusion can be drawn that the fault signal still exhibits periodic impulse characteristics in the SAF domain and its period reverts to the original
To further highlight the feature distinctions between them, the simulation analysis of the fault signal with a single random impact of sampling time 1 s and sampling frequency 10 kHz is carried out. Figure 3 presents the waveform in the time domain and the SAF spectrum of it. It is evident from these two plots that the fault-related component retains notable periodic impulsive features in the SAF spectrum. However, the behavior of random impact in the SAF domain does not resemble their manifestation in the time domain. (a) The time-domain plot of the fault signal with a single random impact and (b) the SAF spectrum of it.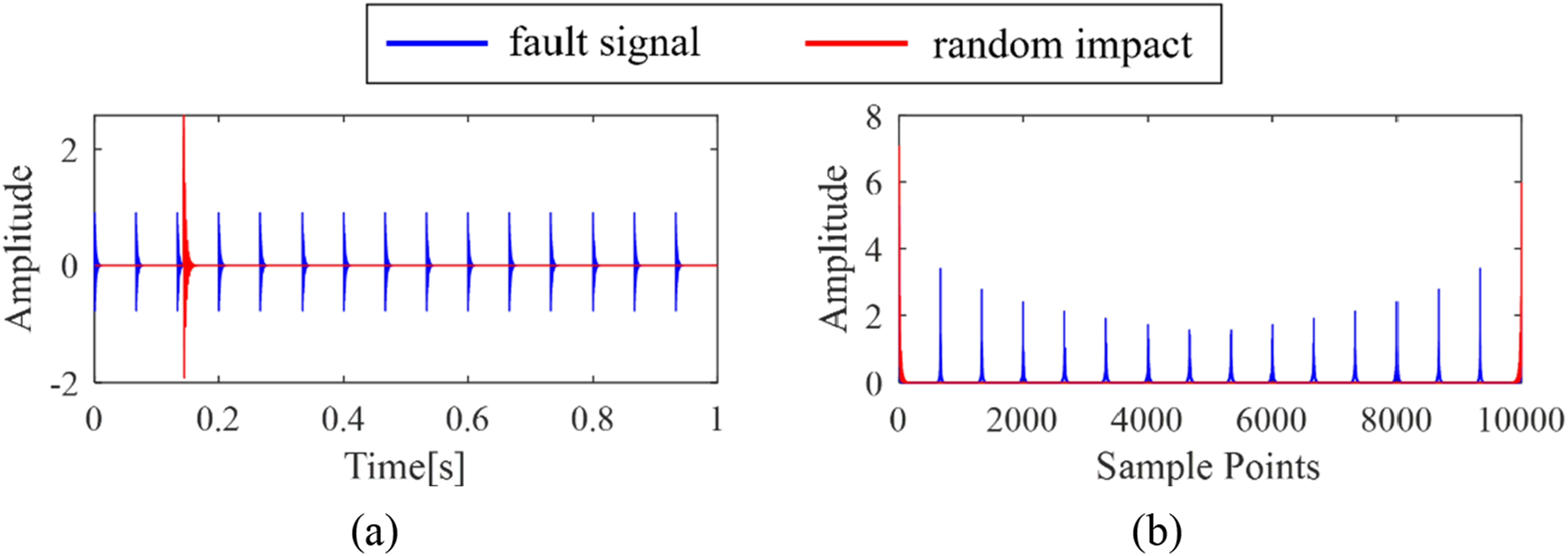
3.2. Dual-domain separation
Based on the feature distinctions described in Section 3.1, this paper designs a dual-domain separation technique, which is delineated as follows.
Initially, the random impact is predominantly distributed at the sides of the SAF spectrum as seen in Figure 3. Therefore, a band-stop filter is designed in the SAF domain to preserve the random impact component, thereby ensuring the substantial retention of interference information.
Subsequently, the filtered signal is then transformed back into the frequency domain via an IFT to derive its frequency spectrum, which predominantly comprises the random impact component.
Then, by executing a spectrum difference operation with the original spectrum in the frequency domain, the shared random impact component is excised, thereby obtaining a purified frequency band that primarily contains fault-related information.
Finally, the IFT is applied again to the above result, returning to the time domain and reconstructing the waveform, in which case the random impact interference is effectively removed.
3.3. Execution of the proposed method
Drawing from the previous description, the detailed procedures of the robust impulse feature extraction method using dual-domain separation are outlined below: Step 1: Acquire the raw signal Step 2: Obtain the spectrum through the application of the Fourier transform to the signal Step 3: Implement a band-stop filter on XTF, specifically retaining approximately 2.5% of data points at each side of it. Acquire the filtered spectrum by performing an inverse Fourier transform on the filtered outcome, denoted as XIF. Step 4: Acquire the spectrum by direct difference operation between XIF and XF, denoted as XDF. Gain the time-domain signal by applying an inverse Fourier transform to XDF, denoted as Step 5: Employ the sparsity indexes-based methods to process Step 6: Analyze the final result processed through the sparsity indexes-based methods by envelope spectrum and detect the fault.
Figure 4 depicts the schematic of the proposed method. Schematic of the proposed method.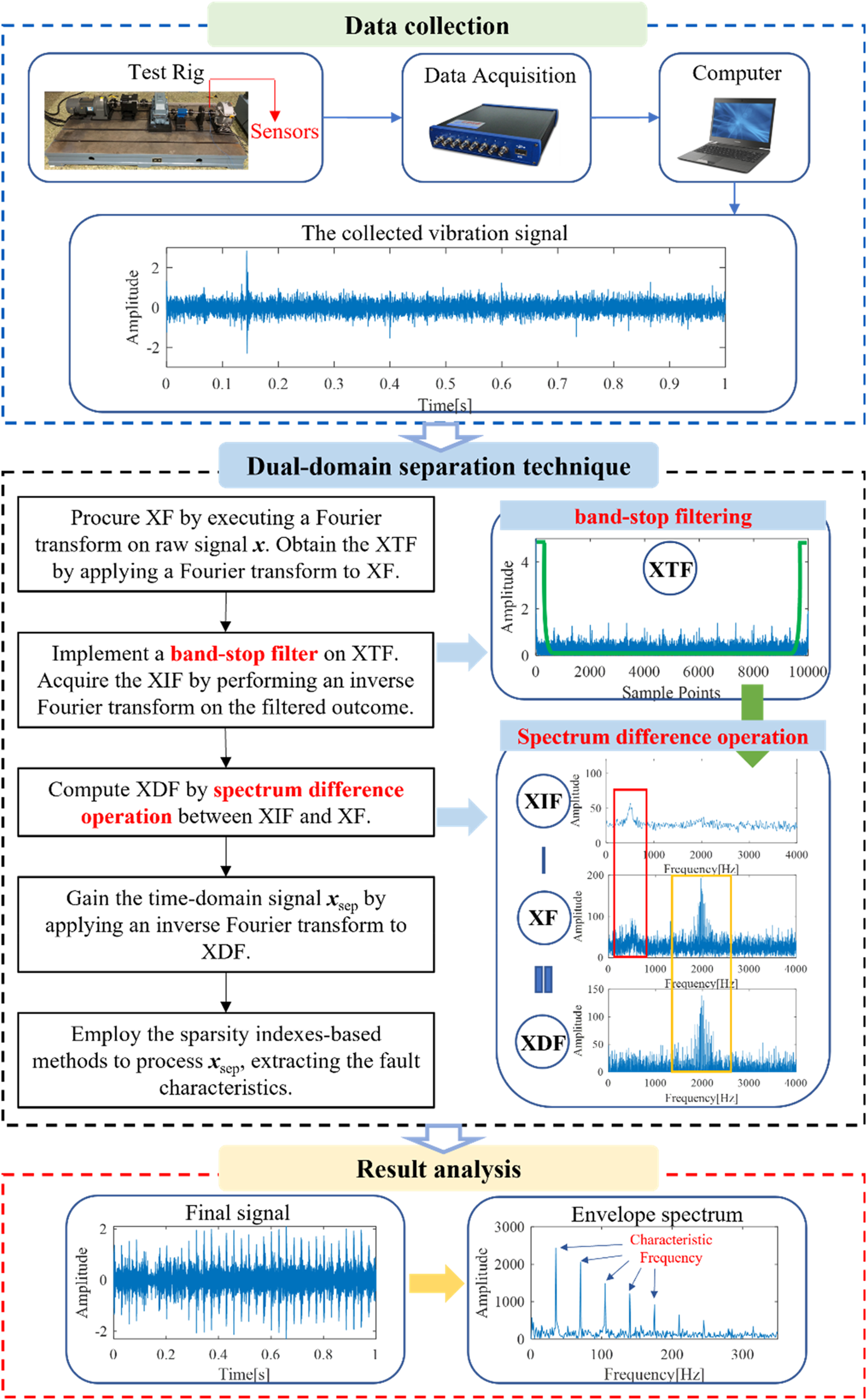
4. Simulation analysis
In this section, to assess the efficacy of the proposed method and its robustness against random impact, simulated rolling bearing vibration signals are employed for analysis. The comparative methods selected for simulation verification include the conventional FK method, the MED method, and the kurtosis-based feature mode decomposition (K-FMD) method, which is constructed by the replacement of the index CK with kurtosis based on the decomposition framework of the FMD method (Miao et al., 2022b).
4.1. Simulation signal construction
The simulation signal based on the rolling bearing faults vibration model is constructed as follows:
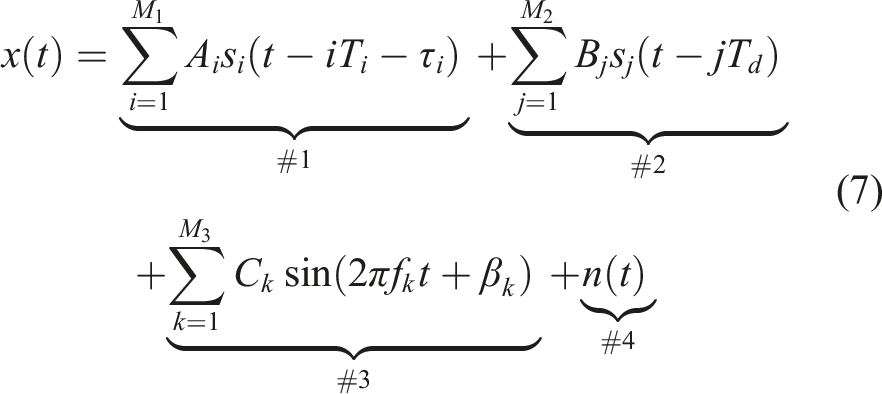
The simulated fault signal x(t) is composed of four components. The initial component comprises the periodic impulses generated by the bearing faults. It is worth mentioning that this section mainly focuses on the single outer race fault to analyze. A
i
denotes the amplitude of neighboring impulses of the fault signals, and T
i
indicates the time interval between them. The parameter τ, employed to mimic the erratic roller skidding within the bearing, is adjusted to be 1%–2% of T
i
. The second part is the random impact component generated by sudden impulses on the bearing shell or electromagnetic interference, etc. B
j
, T
d
, and M2 represent the amplitude, the moment, and the number of them, respectively. s
i
(t) denotes the impulse response function of the bearing system, which is formulated as indicated below:

The third component consists of the harmonic interferences. C k indicates the amplitude of neighboring impulses, while f k and β k stand for rotational frequency and phase, respectively. The last component is the background noise.
4.2. Validation for the efficacy
Parameters of the simulated signals.
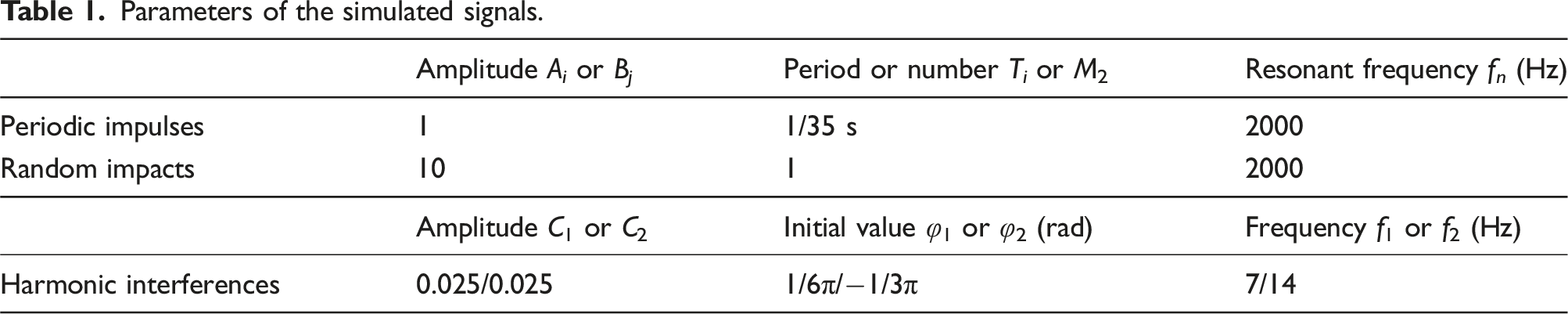
Figure 5 presents the plots of the generated simulation signals, which show severe noise, with the random impact component particularly highlighted. Moreover, the envelope spectrum fails to reveal fault-related characteristic frequencies. The plots of simulated signals: (a) the generated signal and (b) the envelope spectrum of it.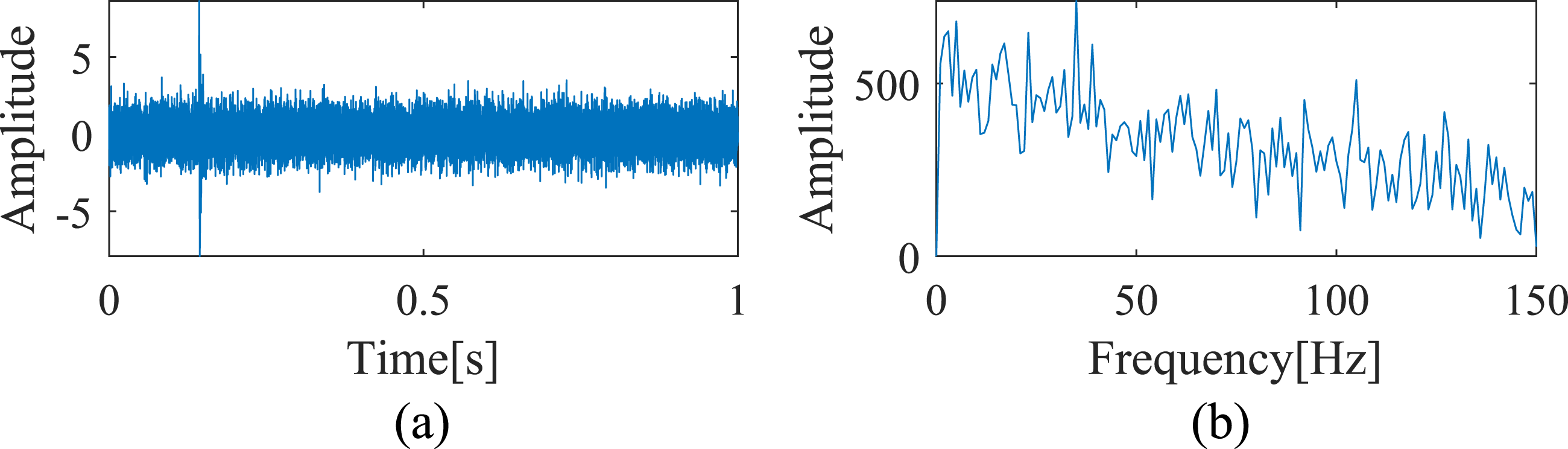
The DDS technique is first applied to process the simulated signal. Figure 6 visually presents the separation result. It can be observed that the random impact component is eliminated after DDS, whose result is shown in Figure 6(b), strongly demonstrating the effective removal of the interference component and the outstanding performance of the DDS technique. (a) The original signal spectrum and (b) the spectrum after DDS.
Subsequently, three traditional methods without DDS are applied to process the simulated signal, respectively, and the results are shown in Figure 7. It is readily apparent that the three conventional methods based on kurtosis unavoidably converge to the random impact component due to their high sensitivity to the interference. In addition, the fault characteristic and some of the multiple harmonics are also found in their corresponding envelope spectra. This is mainly because the frequency bands of the fault and interference component are mixed, leading to the inclusion of fault information when the interference component is filtered. (a) The filtered results of the traditional methods and (b) their envelope spectra.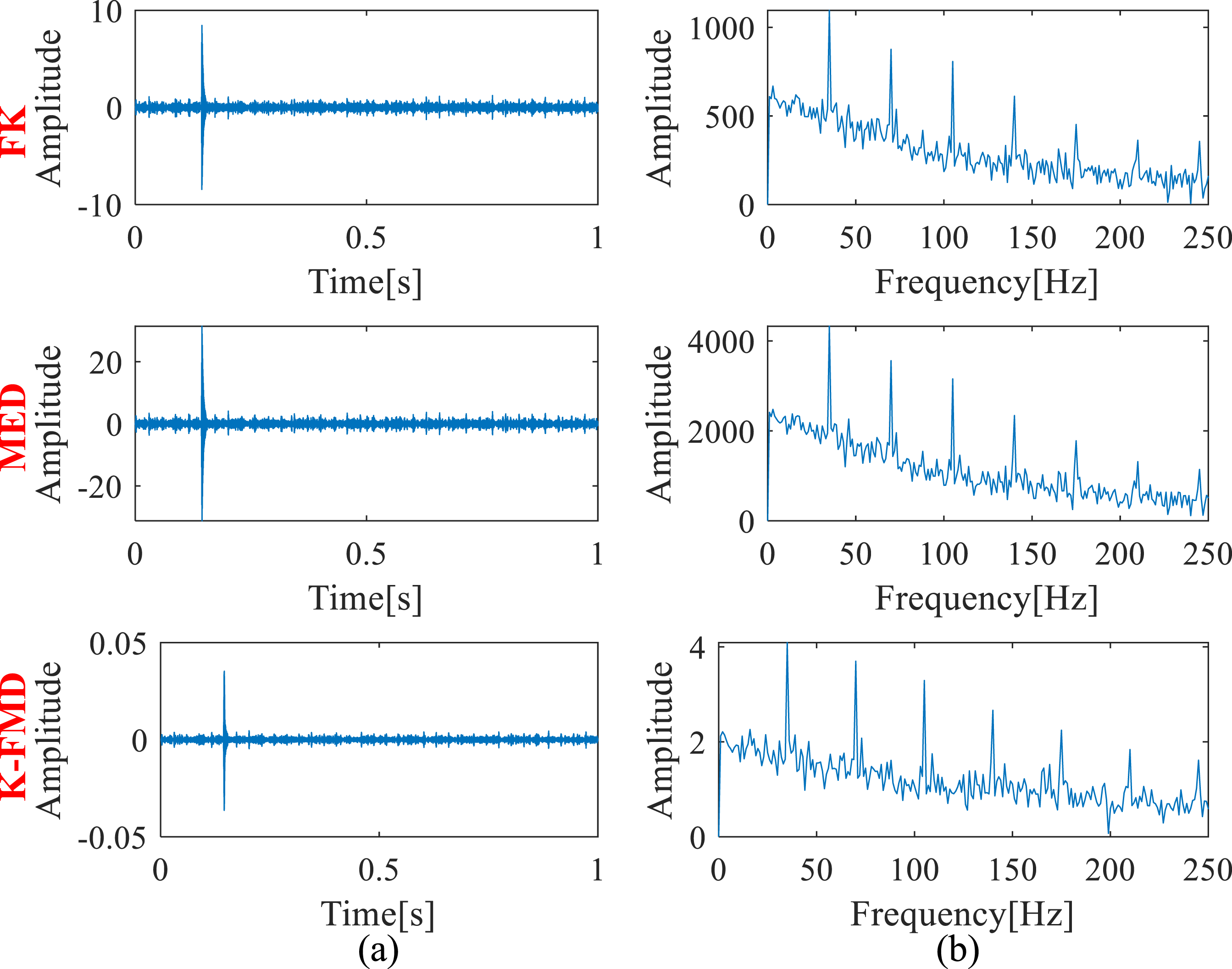
In contrast, the same simulated signal is processed by these three methods with the DDS framework under the same parameters, and the outcomes are presented in Figure 8. It can be seen that the improved methods successfully extract the fault features, even under strong random impact interference. This demonstrates the efficacy of the method with DDS framework and its advantage over conventional sparse indexes-based methods in the situation where the frequency bands of the fault and interference signals are mixed. (a) The filtered results of the methods with DDS and (b) their envelope spectra.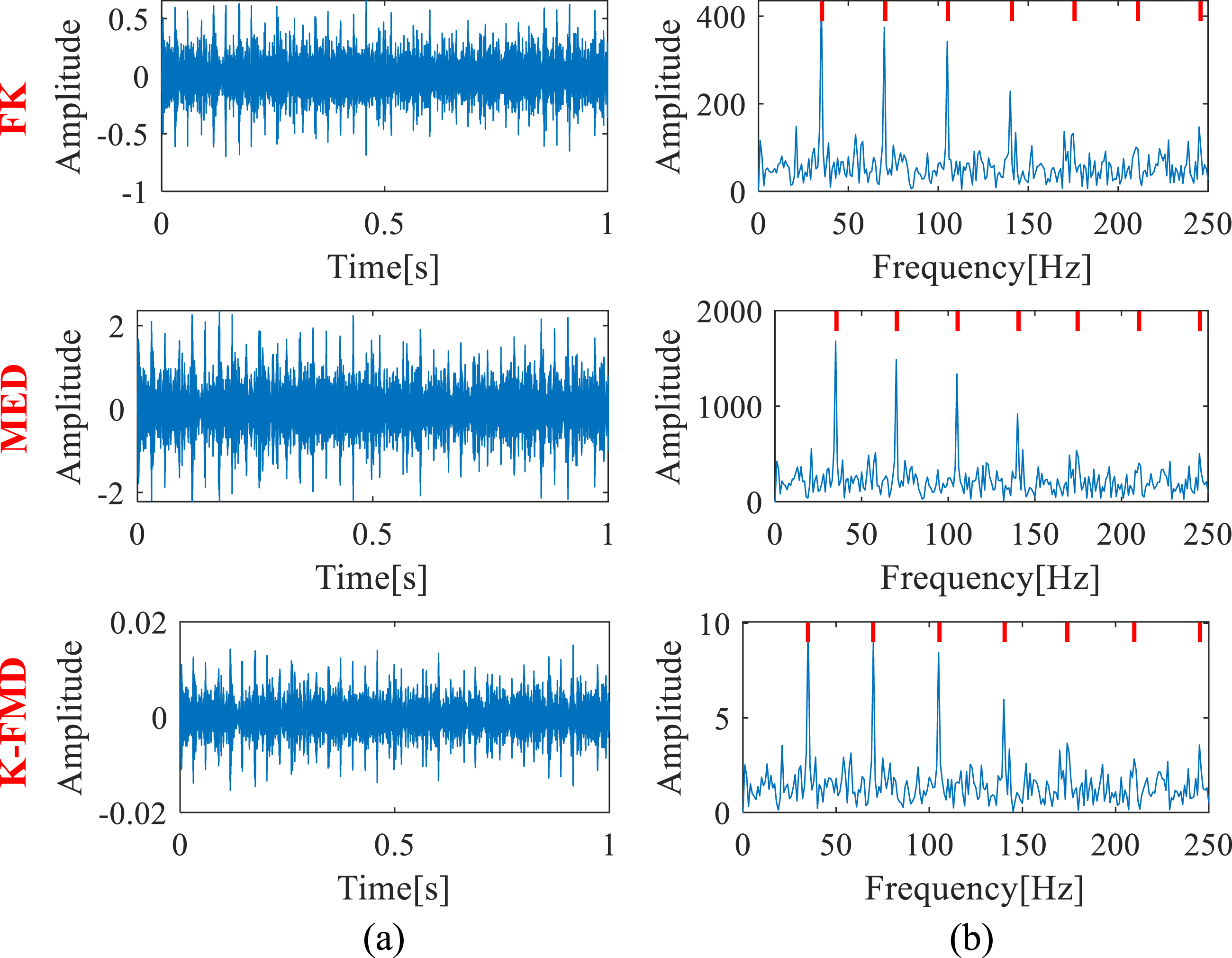
4.3. Robustness analysis to random impact component
In this section, a simulation analysis is conducted to further substantiate the robustness of the method against random impact. To avoid repeating the existing results in section 4.2, this paper adjusts the intensity of random impact by changing the amplitude ratio of the interference to the fault component from 10 to 100 while keeping other signal parameters constant, generating a total of 90 sets of signals. The signals are processed by the proposed method, and the kurtosis values of filtered signals are calculated, which are compared with those of traditional methods under the same filtering parameters. Due to the similarity of the processing results, this paper only presents the comparison results between the traditional MED method and the corresponding improved method proposed in this paper, as shown in Figure 9. In addition, it also displays the time-domain plots of filtered signals by two methods for amplitude ratios of 20, 50, and 80. Trending of kurtosis calculations of filtered signals obtained by the two methods.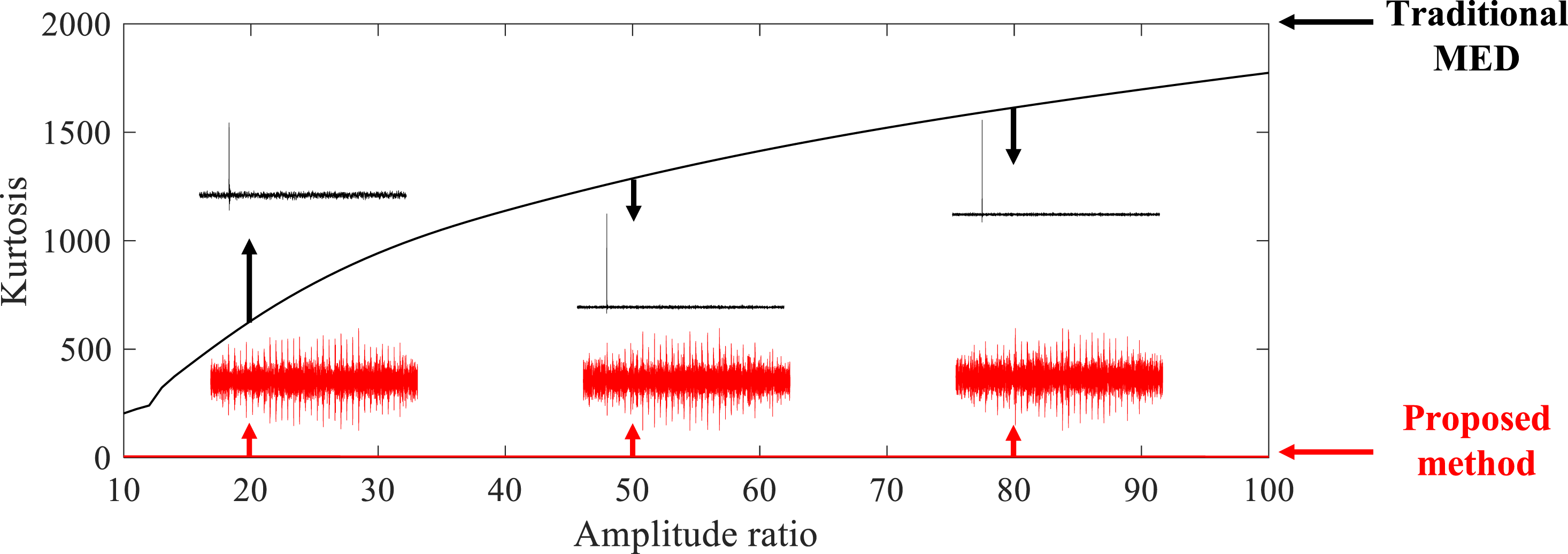
From the results above, it is evident that the kurtosis calculations for the deconvolved outputs obtained through traditional MED are significantly higher compared to those from the proposed method, as the former tends to converge towards the random impact. Moreover, the two methods display different tendencies with the increase of amplitude ratio, where the kurtosis calculations of the filtered signals obtained by the proposed method are almost constant, but the higher the amplitude ratio is, the greater the kurtosis of outputs filtered by traditional MED is. Therefore, the conclusion can be drawn here that the proposed method exhibits strong robustness to random impact interference.
5. Experiment verification
In this section, the efficacy and preeminence of the proposed method are substantiated through the analysis of real data with compound faults of the locomotive wheel bearing. To avoid similar conclusions repetitively demonstrated, the verification is performed by using only the traditional K-FMD method and its corresponding improved method.
The experiment data is obtained from a locomotive wheel bearing test rig, with its diagram shown in Figure 10(a). The driving motor, via the driving wheel, interacts frictionally with the wheelset bearing to turn the outer race of the bearing, whereas the inner race stays fixed in place. This case employs test data of the model 197726 rolling bearing with combined inner and outer race faults, as shown in Figure 10(b), for verification, and Table 2 provides its parameters. (a) Diagram of the locomotive wheel bearing test rig and (b) the locomotive wheel bearings with inner and outer race faults. Parameters of locomotive wheel bearings.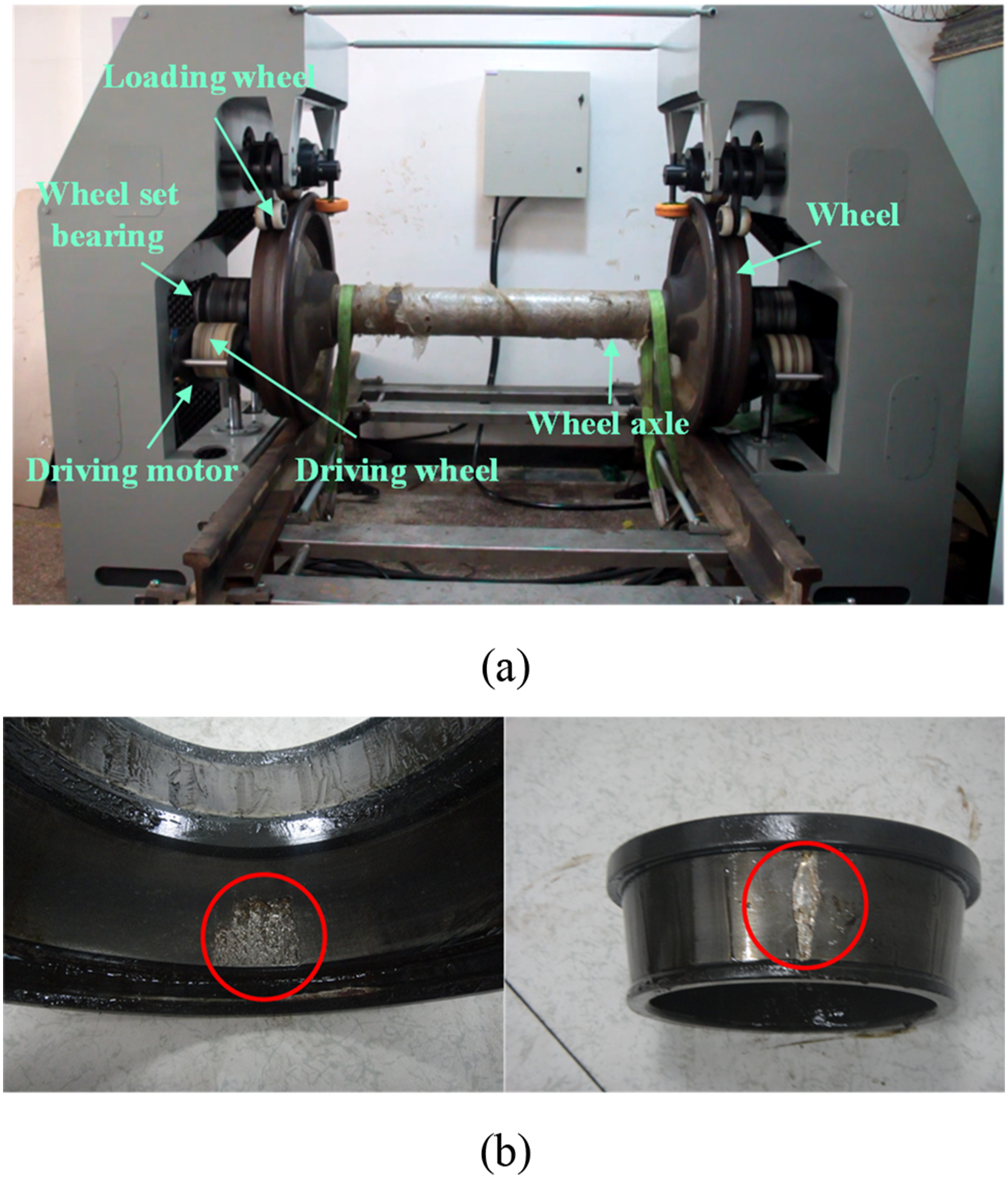

During the experiment, the outer race of the bearing is rotated at a speed of 250 rpm. The sampling frequency is set to 76.8 kHz and the collected data is 1 s. Figure 11 presents the time-domain waveform of the experimental signal. It is obvious that there is a significant random impact amplitude at around 0.3 s of the plot, and the periodic impulse component is not pronounced. The time-domain plot of the original signal.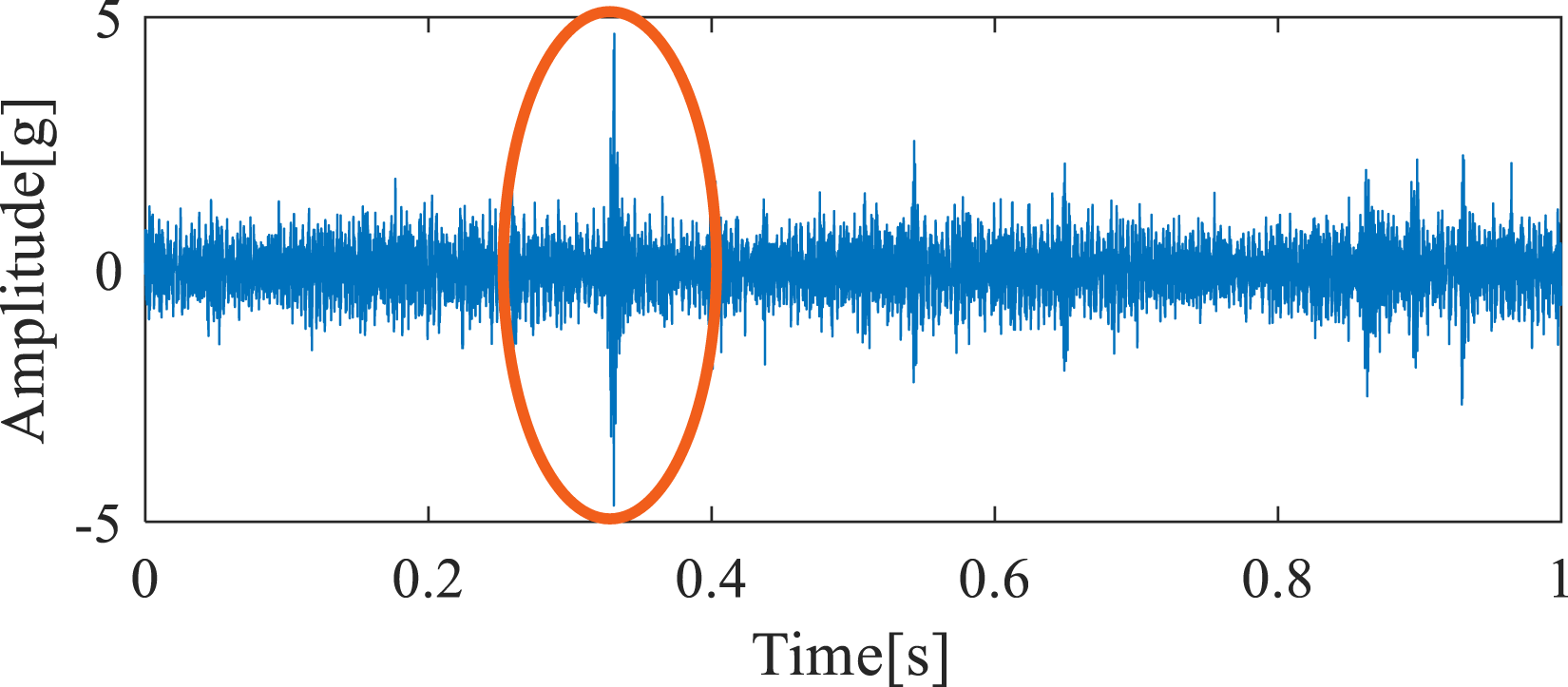
Employing both the conventional K-FMD and the proposed method, while maintaining consistent filter parameters and the mode numbers of 2, the signal is subjected to analysis, with the respective outcomes presented in Figures 12 and 13. The outcomes shown in Figure 12 reveal that the final mode 1 derived from the conventional method still extracts the random impact component with high amplitude, although mode 2 shows some of the inner race fault information. In contrast, the results presented in Figure 13 show that the two final modes derived from the proposed method successfully extract the fault information of both outer and inner race, respectively. (a) Decomposition modes of traditional K-FMD and (b) their envelope spectra. (a) Decomposition modes of the K-FMD with DDS and (b) their envelope spectra.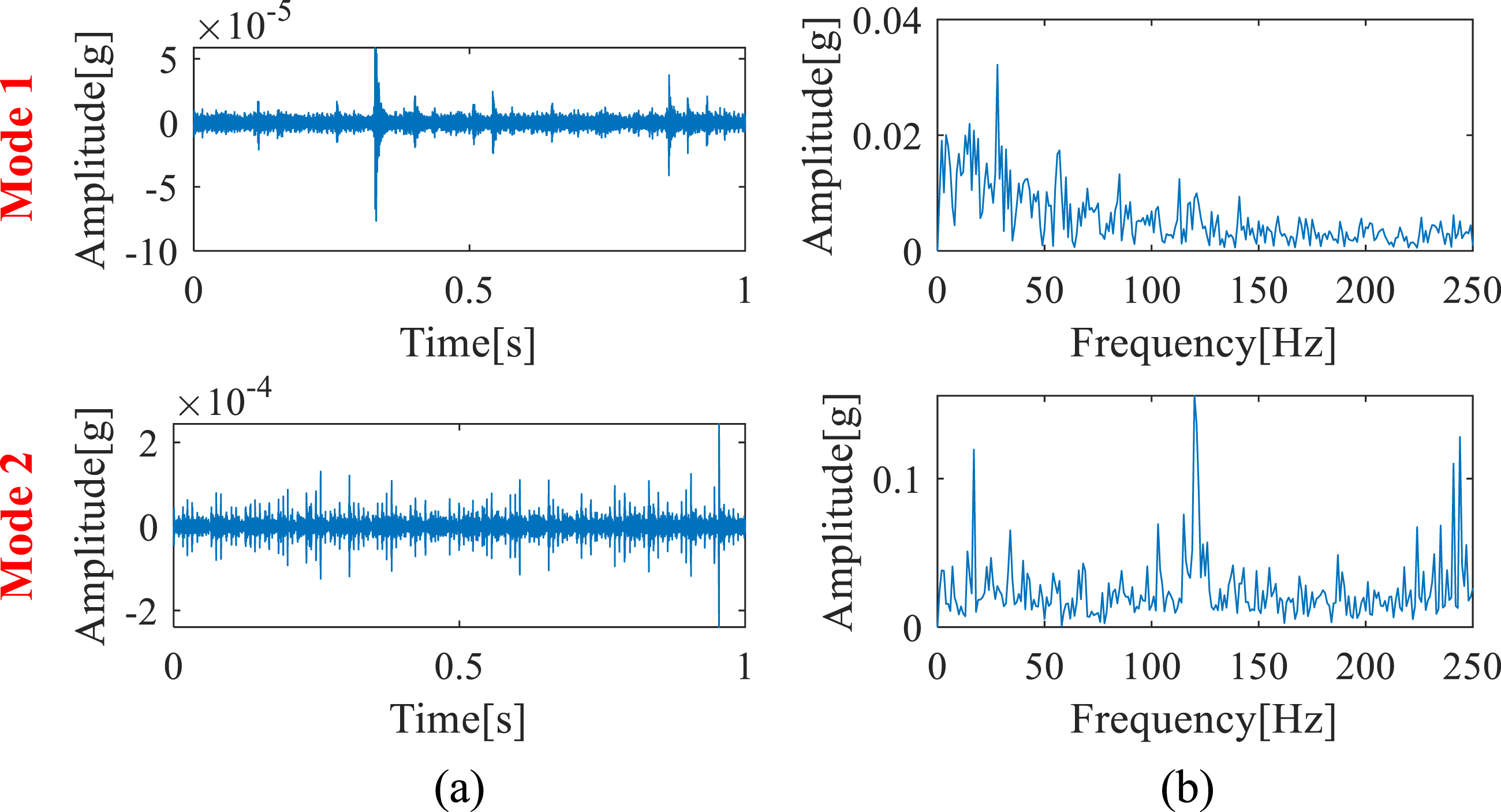
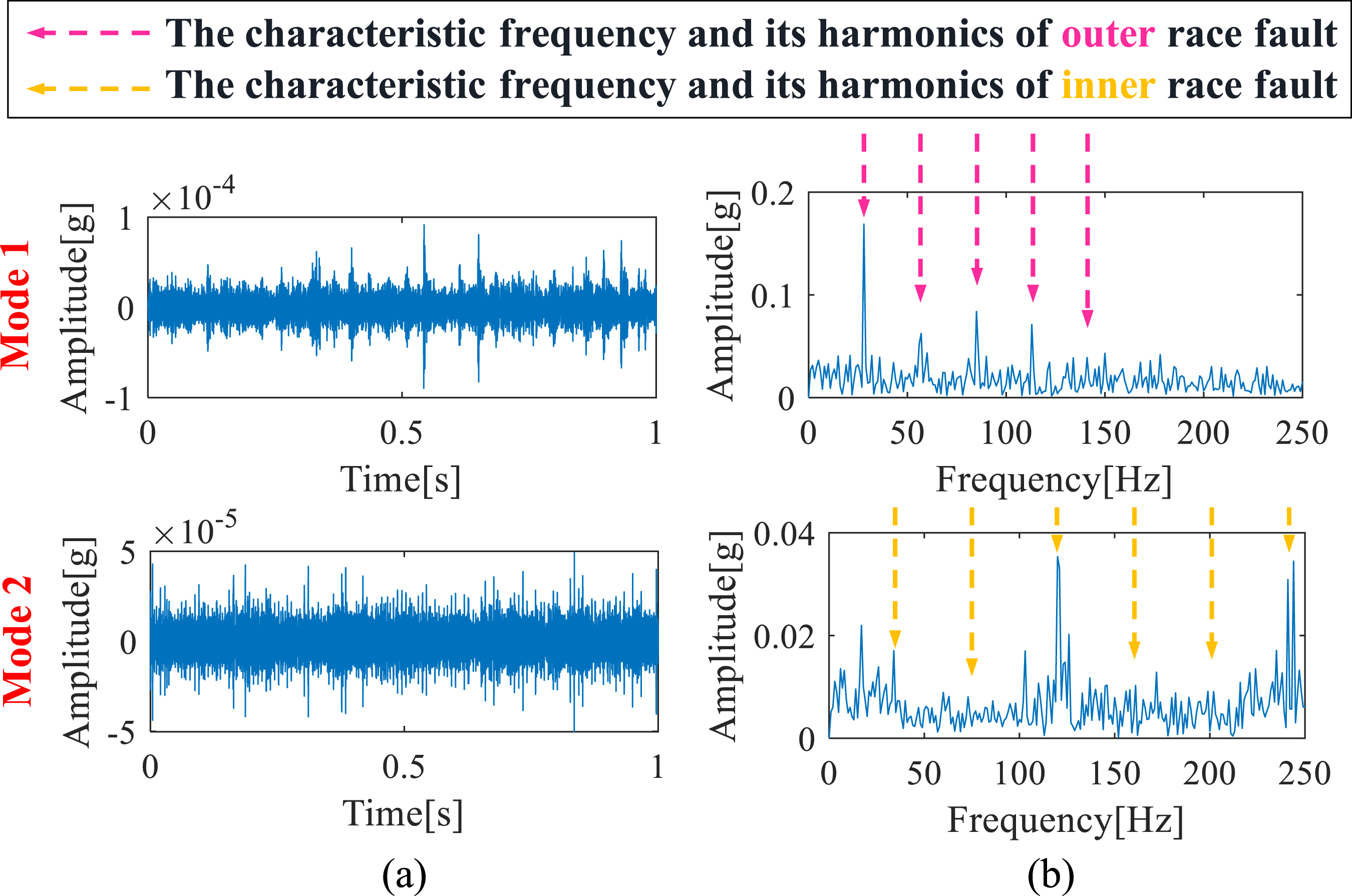
The conclusion drawn here is that the proposed method exhibits effectiveness and superiority in solving the issue of locomotive wheel bearing compound fault diagnosis under the condition of high random impact component, and is not influenced by this interference.
6. Conclusion
The sparsity indexes-based methods hardly solve the issue that they are sensitive to random impact especially when the frequency bands of the fault and the interference information are mixed by optimizing the feature indexes. Motivated by this, this paper proposes a robust impulse feature extraction method. It initiates from the perspective of the characteristics of the fault and interference signals, and explores the feature distinctions of them across different domains to design the dual-domain separation technique. It thoroughly overcomes the disadvantage of the sparsity index-based methods which are highly sensitive to random impact component without affecting the extraction ability of the bearing fault impulse. Furthermore, the complex frequency spectrum issue, which heavily troubled the filtering frameworks, has been successfully tackled by the proposed method. Finally, the proposed method provides novel insights to improve the different filtering methods. Its performance is verified by the improvement on the sparsity indexes-based gram, deconvolution, and decomposition methods, which indicates the potential for future applications in the field of the fault diagnosis of the locomotive wheel bearing.
Despite the above advantages, it remains to be seen whether the method is also highly robust against other interference signals. Future research will continuously refine this method, further optimizing the theoretical foundation to make its application more widespread.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China (No.52375072) and the Fundamental Research Funds for the Central Universities , which are highly appreciated by the authors.