
Abstract
Bilateral teleoperation (BT) systems can expand the working capabilities of human operators in remote, unstructured, and hazardous environments, and can be applied in a wide range of fields such as nuclear detection, surgery, mining, outer space research, and military operations. At present, there is little research on the control theory of flexible-link BT systems, and communication delay issues have not been considered. However, in practical terms, transmission delay in communication networks is a major problem in BT systems, and even small time delay often reduce system performance and lead to system instability. This paper takes the bilateral teleoperation system composed of master and slave flexible-link manipulators (MSFLM-BT) as the research object, and designs corresponding control scheme based on partial differential equation (PDE) dynamic model in the presence of communication delay, successfully achieving vibration suppression and angle coordination tracking of the system. The stability of the system is proven using the Lyapunov method, and under this control scheme, all closed-loop signals are bounded. Finally, the effectiveness of the proposed control scheme is verified through numerical simulation.
Keywords
1. Introduction
Compared to traditional rigid mechanical systems, flexible mechanical systems have the characteristics of light weight, low energy consumption, fast speed, and high flexibility, and are widely used in service industry, manufacturing industry, aerospace, and other fields. Therefore, the modeling and control of flexible mechanical systems have become one of the key research topics in the field of control in recent years Liu et al. (2023a, 2022a); Zhou et al. (2021); Liu et al. (2022c, 2019, 2022b, 2023b); Zhao et al. (2020); Liu et al. (2023c, 2021), and Ji and Liu (2023). The motion characteristics of flexible mechanical systems are related to both time and position variables, making it a typical distributed parameter system with infinite dimensional characteristics. The establishment of an accurate dynamic model is an important prerequisite for the design of control methods. At present, the models established for flexible systems are divided into ordinary differential equation (ODE) model and partial differential equation (PDE) model. ODE model is a simplified model, which only retains the key modes and ignores the high-order modes Rasouli et al. (2021, 2020), which is easy to cause the observation or control overflow problem Zhao et al. (2020), and then affect the stability of the system. While the PDE model can accurately describe the infinite dimensional characteristics of the system, retain all the modes of the system, and effectively avoid the overflow problem that may occur based on the ODE approximate model Meirovitch and Baruh (1983) and Liu et al. (2022c). In addition, flexible mechanical systems typically use new types of flexible lightweight materials, which are prone to elastic deformation and vibration during motion Liu et al. (2022c); Zhao et al. (2020), and Ji and Liu (2024). These vibrations often interact with the system’s motion, seriously affecting its working state and even damaging its stability, causing the entire system to lose control. This hinders the practical application of flexible mechanical systems in engineering. Therefore, the research on control theory of flexible mechanical systems is of great significance.
However, in reviewing the relevant literature on modeling and control theory of flexible mechanical systems, the bilateral teleoperation (BT) system composed of master-slave flexible mechanical systems has received little attention. A BT system is a master-slave robotic framework characterized by bidirectional energy/information exchange, enabling the operator to control the remote slave while receiving feedback (e.g., position/force) from slave-side environment Tian et al. (2025) and Nahri et al. (2022). BT systems can enable humans to complete tasks without exposure to hazardous environments, and can be applied in a wide range of fields such as nuclear detection, surgery, mining, outer space research, and military operations Jiang et al. (2022); Nguyen et al. (2023); Gu et al. (2024b); Cruz Ortiz et al. (2020), and Chen et al. (2020). In recent decades, research on coordinated control of BT systems has achieved fruitful results Han et al. (2010); Jung and Jeon (2022); Gu et al. (2024a); Cruz-Ortiz et al. (2022); Wang et al. (2022); Peñaloza-Mejía et al. (2017); Wang et al. (2014); Yang et al. (2019), and Wang et al. (2018). Unfortunately, most research is focused on rigid mechanical systems.
Comparison of relevant references on the flexible BT system.
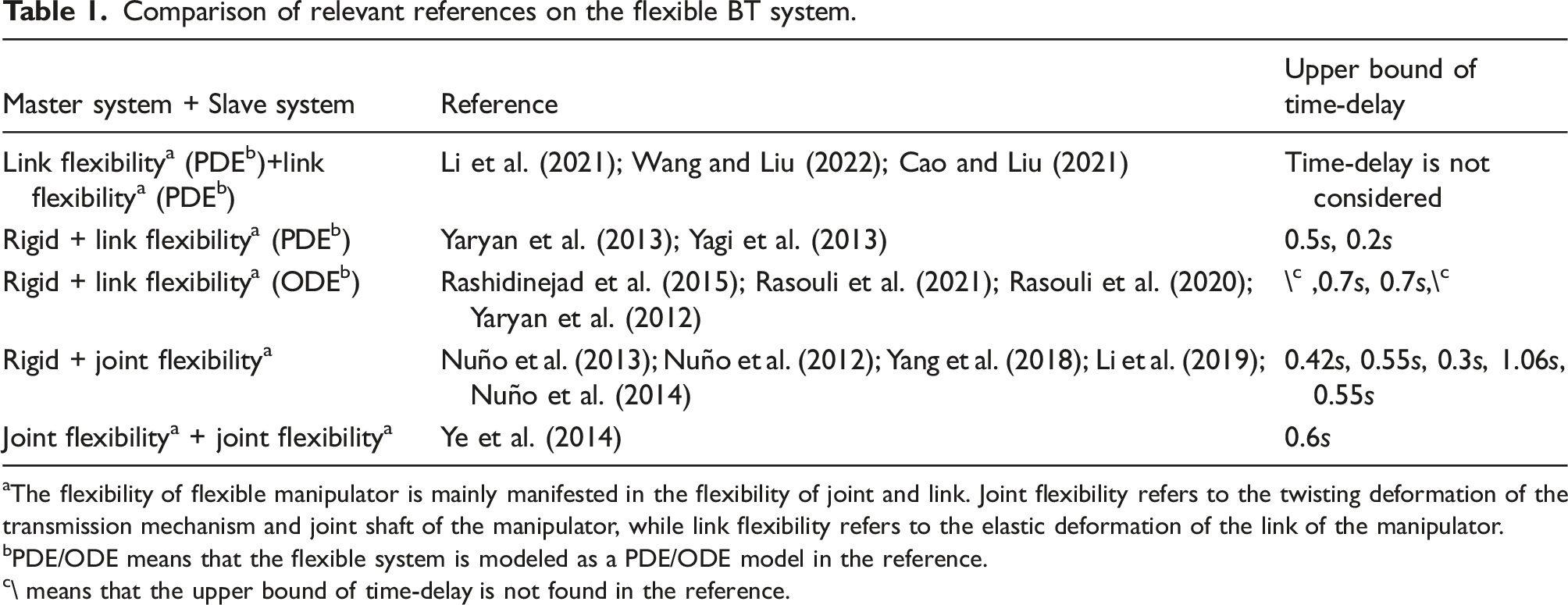
aThe flexibility of flexible manipulator is mainly manifested in the flexibility of joint and link. Joint flexibility refers to the twisting deformation of the transmission mechanism and joint shaft of the manipulator, while link flexibility refers to the elastic deformation of the link of the manipulator.
bPDE/ODE means that the flexible system is modeled as a PDE/ODE model in the reference.
c∖ means that the upper bound of time-delay is not found in the reference.
However, the above three references do not consider the issue of communication delay. In practical terms, transmission delay in communication networks is a major problem in BT systems. Even small time delays often reduce system performance and lead to system instability, which has become one of the complex problems that researchers urgently need to solve Chen et al. (2020); Forouzantabar et al. (2012), and Li et al. (2013). At present, there have been many studies on the communication delay problem of BT systems Chen et al. (2020); Sun et al. (2016b); Zhang et al. (2022); Sun et al. (2020); Liu and Hu (2019); Sun et al. (2016a); Daly and Wang (2014); Sun et al. (2017); Mohammadi et al. (2017); Gong et al. (2022), and Gong and Ji (2022). In reference Chen et al. (2020), an adaptive robust control scheme based on radial basis function neural network is proposed to ensure the global stability of BT robot system under time-delay. Based on a four channel nonlinear teleoperation system, reference Sun et al. (2016b) proposes a novel time-domain passivity method based on waves, which can ensure system stability in the presence of random time delays. Reference Zhang et al. (2022) applies adaptive control method to estimate the upper bound of time delay for a class of nonlinear BT systems, in order to solve the problem of the significant impact of time delay on system stability. However, these studies are all based on the ODE model for control scheme design, and there is currently no research on the communication delay problem of flexible-link BT systems based on the PDE model. The infinite-dimensional nature of PDE models hinders the direct application of control methods developed for the rigid mechanical systems to flexible mechanical systems. Additionally, it poses significant challenges to the controller design and stability analysis of flexible systems Liu et al. (2023b). This paper focuses on the control theory research for the MSFLM-BT system with the objectives of achieving vibration suppression and angular coordination tracking of master-slave flexible-link manipulators under communication delays. The master manipulator operates in a safe environment to track a desired angle, while the slave manipulator, located in a remote workspace, synchronizes its angular position with the master.
To sum up, this paper is based on the PDE model of MSFLM-BT system, and studies the control scheme in the presence of communication delay between the master and slave flexible-link manipulators. The difficulty of this study can be summarized as follows: (1) The vibration of flexible-link manipulators will affect the angle coordination tracking of the system. (2) At present, there is no research on the communication delay problem of flexible-link BT system based on PDE model. (3) The PDE model of MSFLM-BT system is infinite dimensional, which will bring difficulties to the design and stability analysis of the controller. Therefore, the vibration suppression and angle coordination tracking of MSFLM-BT system in the presence of communication delay is a challenging and meaningful topic, and it is of great significance for the application of flexible-link BT system in practical engineering.
The remainder of this paper is structured as follows: Section 2 presents system modeling and essential preliminaries. Section 3 provides an overview of the control system design and a detailed stability analysis. In Section 4, the effectiveness of the control scheme is verified by numerical simulation. The conclusion of this paper is in Section 5.
2. Modeling and preliminaries
2.1. Modeling
The controller is designed based on the PDE dynamic model of the MSFLM-BT system established in reference Li et al. (2021). The model structure of the system is shown in Figure 1, in which the master manipulator is in a safe environment and tracks the given angle θ
d
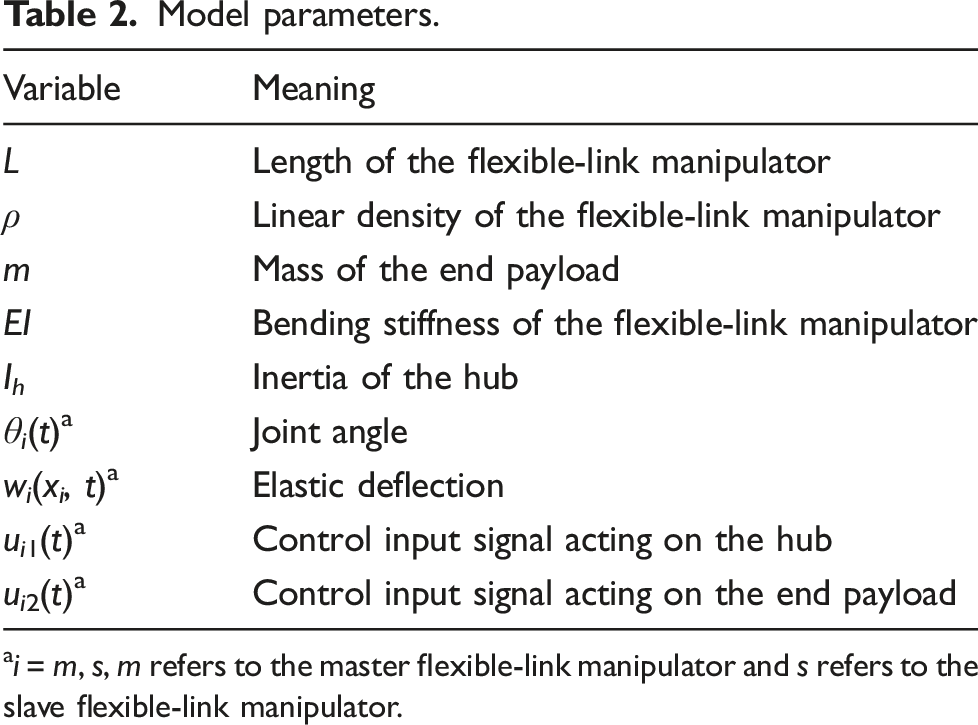
, and the slave manipulator is located in a remote environment and tracks at the same angle as the master manipulator. In Table 2, the model parameters are elucidated. Structure of MSFLM-BT system. Model parameters. ai = m, s, m refers to the master flexible-link manipulator and s refers to the slave flexible-link manipulator.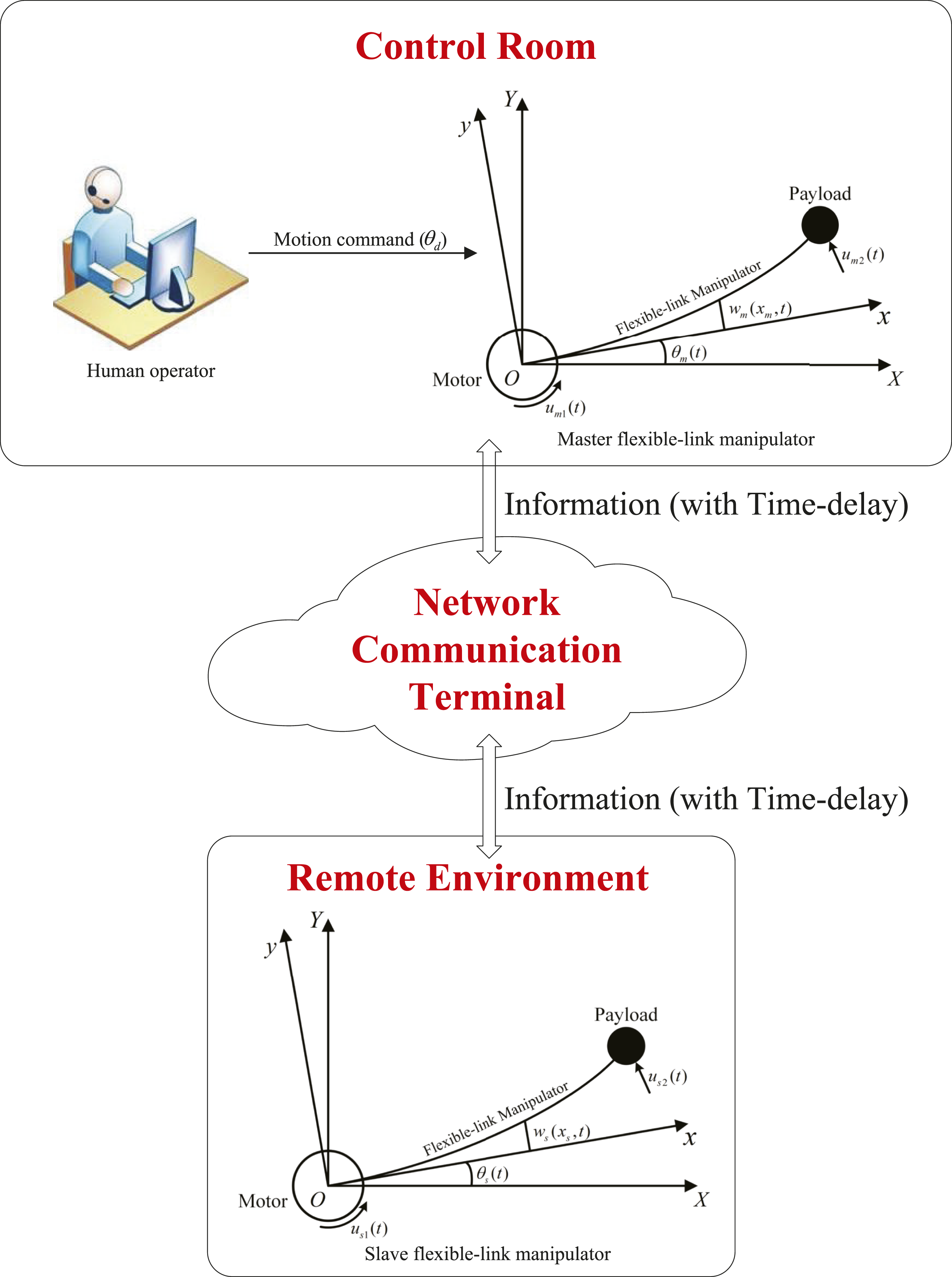
To enhance clarity, the subsequent notations are employed throughout this paper:
The displacement of the master and slave flexible-link manipulators can be expressed as follows
It is easy to obtain
According to the reference Li et al. (2021), we get the PDE model of MSFLM-BT system. It can be seen that vibration and angle are coupled



2.2. Preliminaries
Rahn (2001) For 

Hardy et al. (1952) For If ϕ′(0, t) = 0, ∀t ∈ [0, ∞), then

Queiroz et al. (2000) If the kinetic energy is bounded for ∀t ∈ [0, + ∞), then
Queiroz et al. (2000) If the potential energy is bounded for ∀t ∈ [0, + ∞), then
3. Controller design
Firstly, the angle tracking errors of the master flexible-link manipulator and the slave flexible-link manipulator are defined as ɛ m (t) = θ m (t) − θ d and ɛ s (t) = θ s (t) − θ d , respectively.
In order to reduce the impact of communication delay on the MSFLM-BT system, the following auxiliary systems are introduced



To design the control law, we introduce the following auxiliary signals



The control law is


In Figure 2, the structural diagram for designed controller is illustrated. In this figure, The structure diagram of closed-loop system.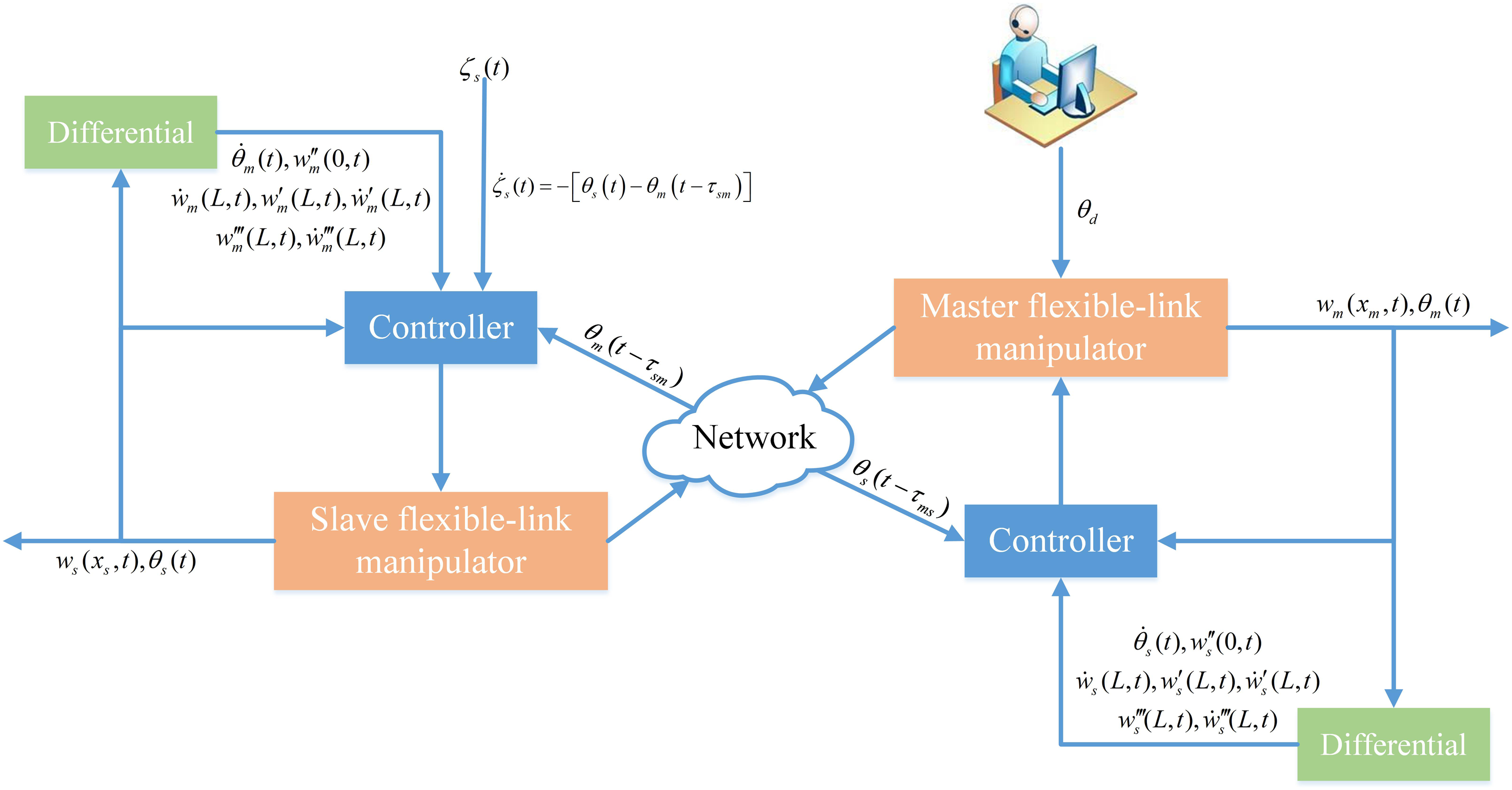
Considering MSFLM-BT system (2)–(5), the control laws (18)–(21) can successfully realize vibration suppression and angle coordination tracking, that is,
This proof is established through Lyapunov theory. Firstly, we design Lyapunov–Krasovskii function: Using Lemmas 1–2, we can get Then we have Combining equations (3), (14), (18), and skillfully using Combining equations (3), (15), (20), and skillfully using By using Lemma 1 and the partial integration method, combining equations (2), (5), (16)–(17), and the boundary conditions Combining equations (4), (16), (17), (19), and (21), we obtain By using Lemma 1 and the partial integration method, combining equations (2), (5), (16)–(17), and the boundary conditions Combining equations (10)–(11), we obtain Set ω
s
equal to ω
m
, then we get Then Then the derivative of the Lyapunov function can be obtained According to Lemmas 1–2 (detailed derivation process can be found in equations (A6)–(A16) in the Appendix), we can further obtain From equation (42), we can get Integrating both sides of equation (42) at the same time, we get Accordingly, equation (43) follows that Since w
i
(x
i
,t), To sum up, 






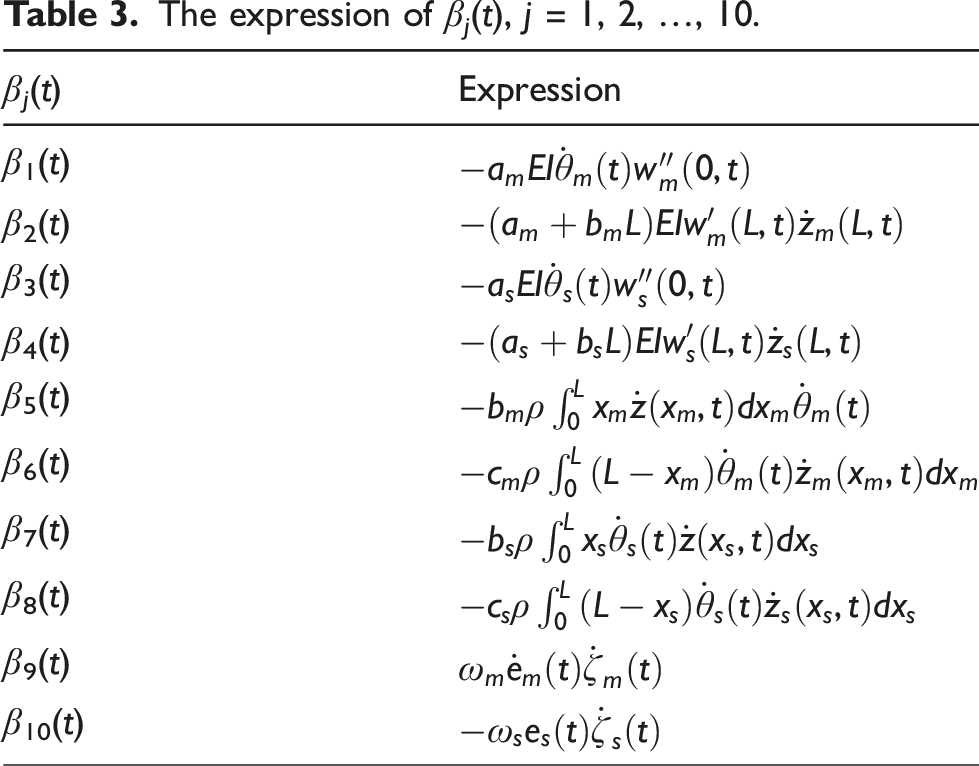
The expression of β j (t), j = 1, 2, …, 10.
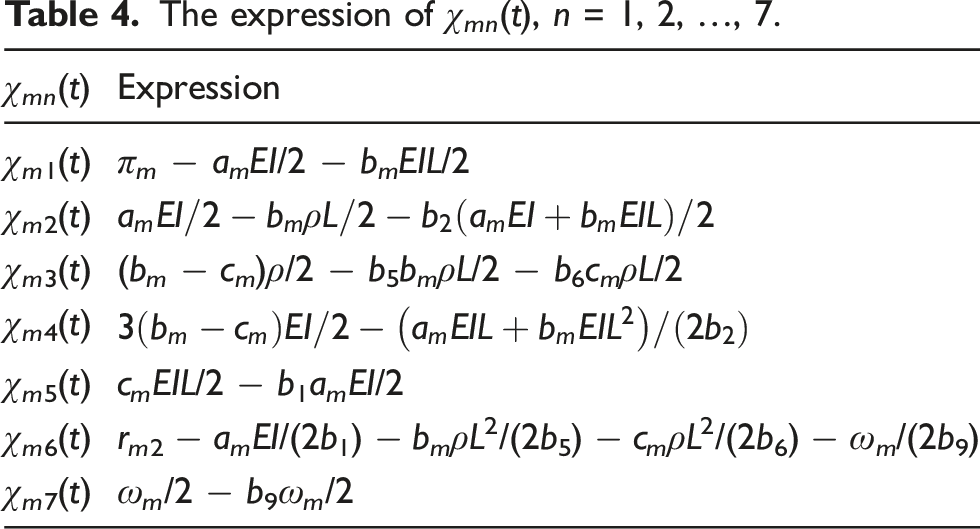
The expression of χ mn (t), n = 1, 2, …, 7.
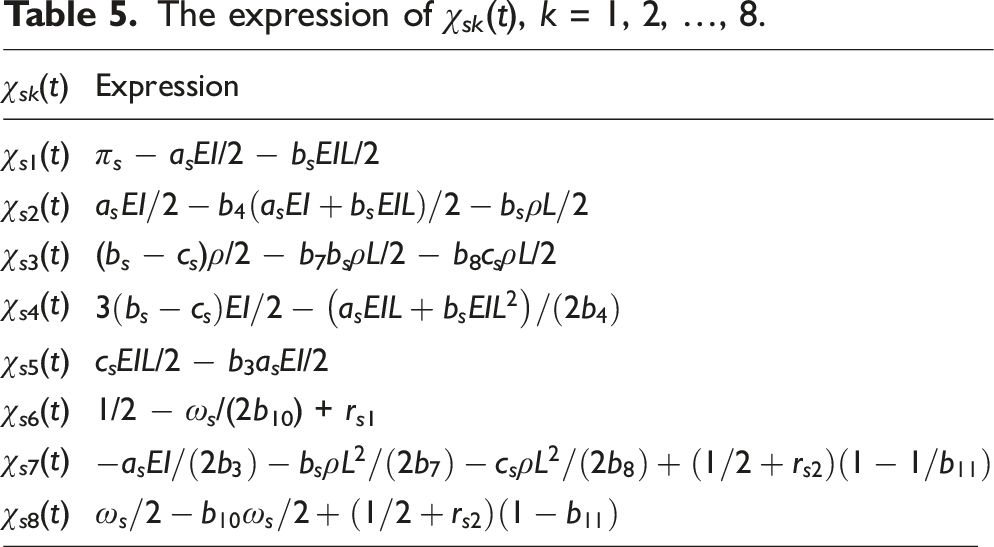
The expression of χ sk (t), k = 1, 2, …, 8.
4. Simulations
The performance of the control law (18)–(21) for the MSFLM-BT system is verified by applying the finite difference method He et al. (2014) and Zhao et al. (2020). The system parameters determined according to reference Li et al. (2021) are given as: L = 1m, ρ = 0.2 kg/m, m = 0.1 kg, EI = 3Nm2, and I
h
= 0.1kgm2. w
i
(x
i
, 0) is initialized to
According to equation (42) analysis, increasing the values of k
m
, rm1, rm2, π
m
, k
s
, rs1, rs2, π
s
and appropriately selecting the value of ω
m
can ensure that
To assess the effect of the control law, simulations of the system are conducted under five scenarios.
Without control.
τ
sm
= 0.5s, τ
ms
= 0.5s.
τ
sm
= 1s, τ
ms
= 1s.
τ
sm
= 1.5s, τ
ms
= 1.5s.
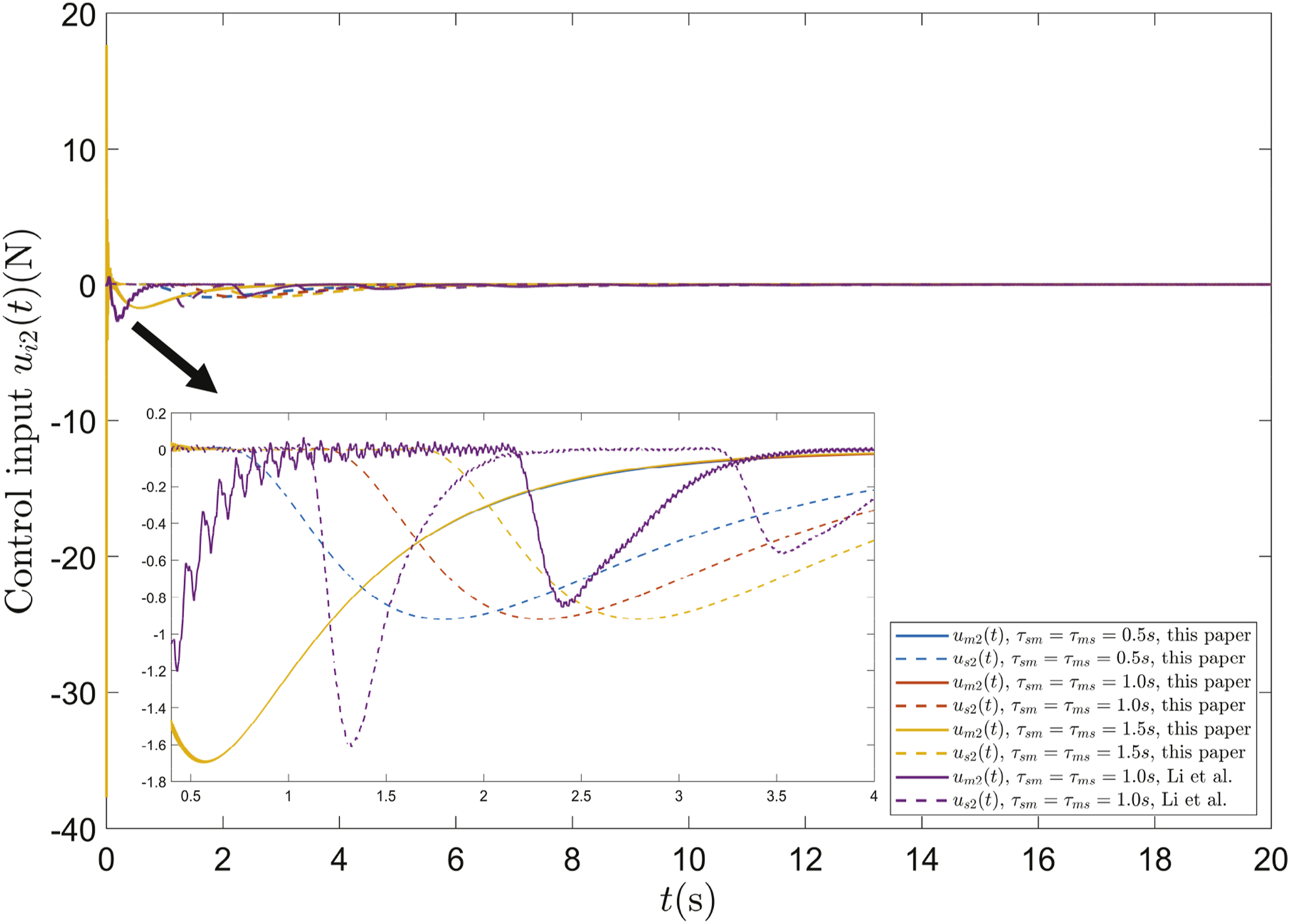
are simulated under the control law proposed in reference Li et al. (2021). Communication delay is τsm = 1s, τms = 1s.
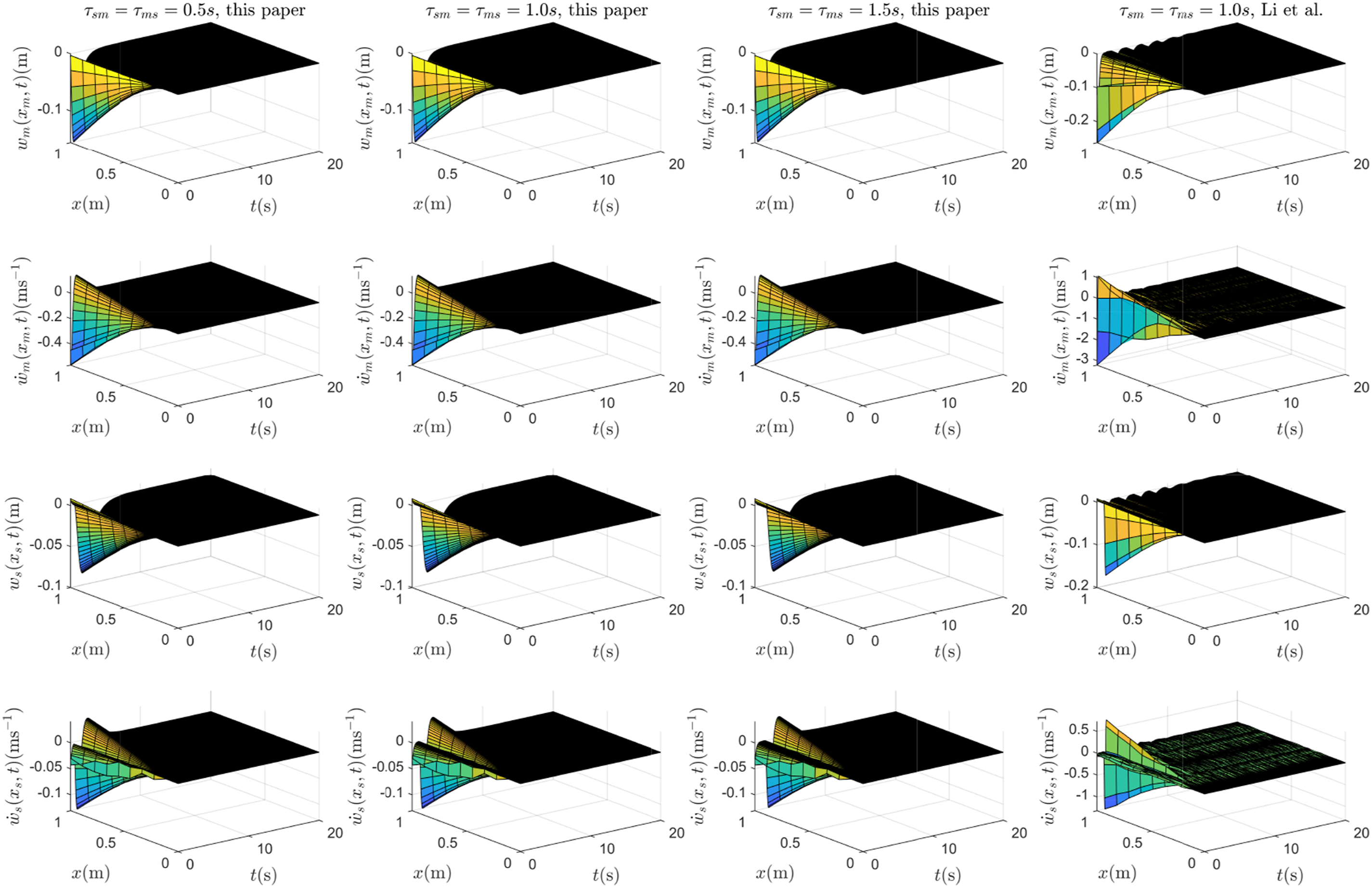
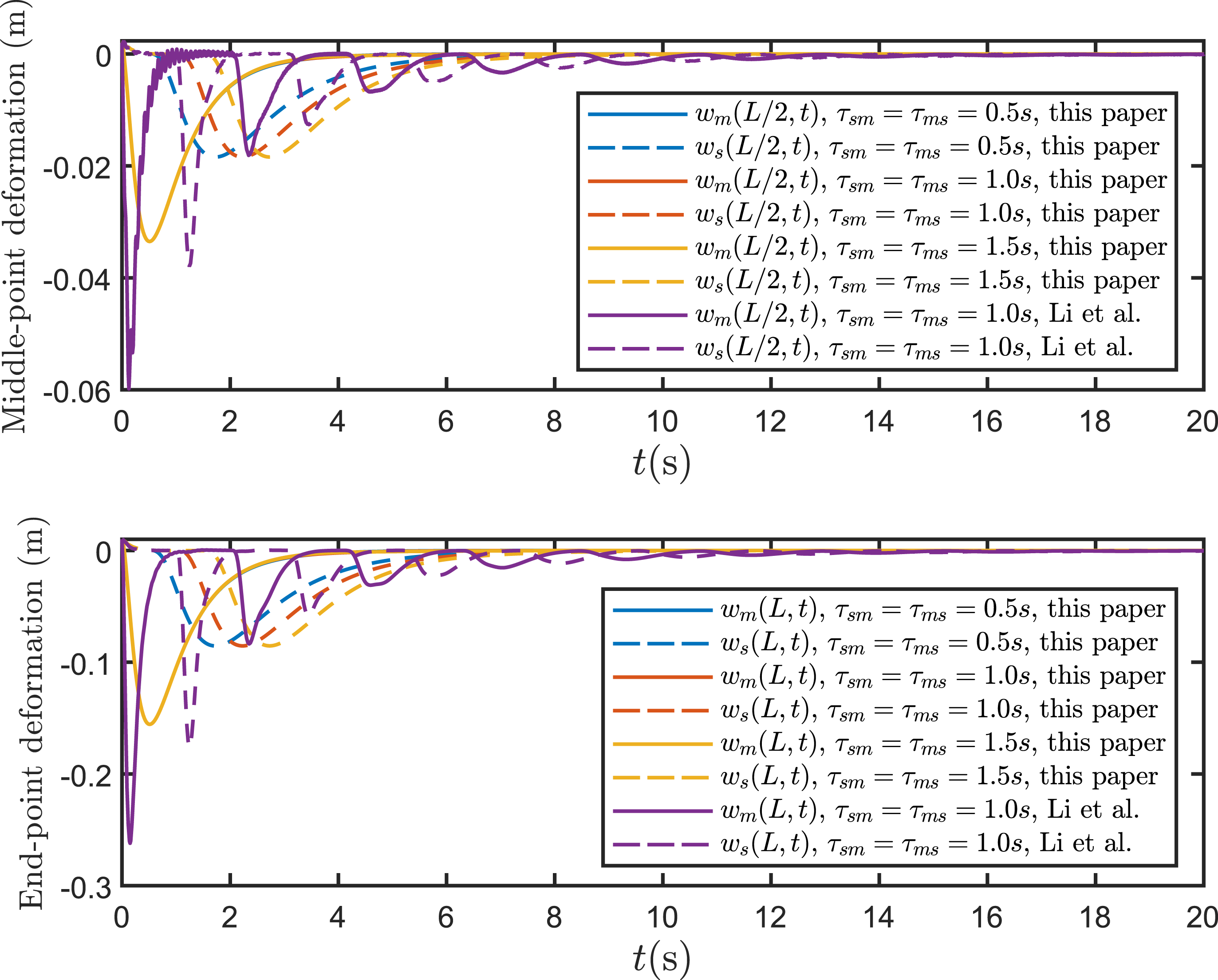
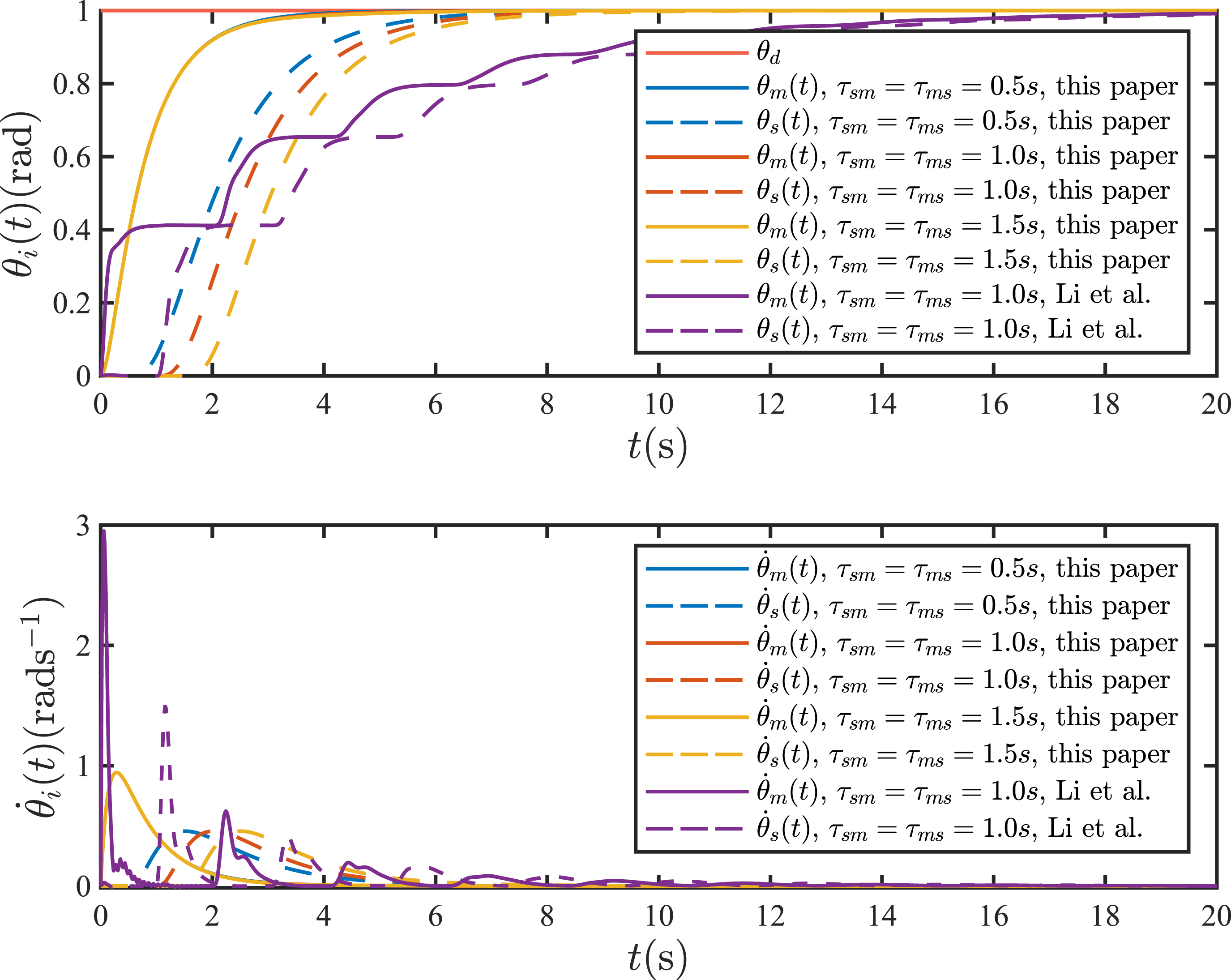
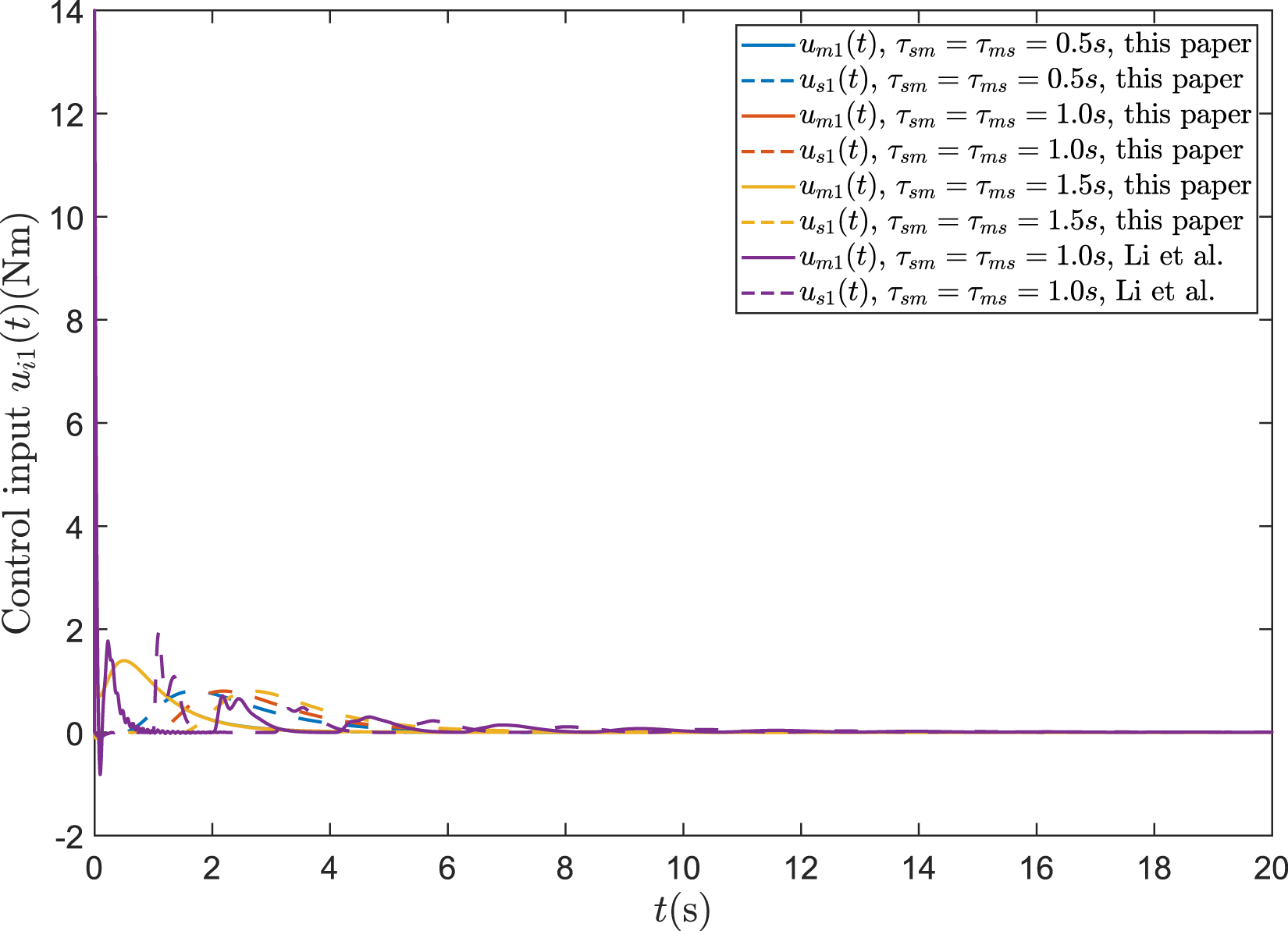
Figure 3 shows the uncontrolled dynamics of the MSFLM-BT system, with the red and blue lines overlapping. It is evident from this figure that the master-slave flexible-link manipulators experience significant vibration in the absence of control. Figures 4–6 show the vibration suppression and angle coordination tracking results of the MSFLM-BT system under The simulation results of The deformation and deformation rate results of the MSFLM-BT system under The middle-point deformation and end-point deformation results of the MSFLM-BT system under The angle θ
i
(t) and angle speed The output of actuator ui1(t) results of the MSFLM-BT system under The output of actuator ui2(t) results of the MSFLM-BT system under 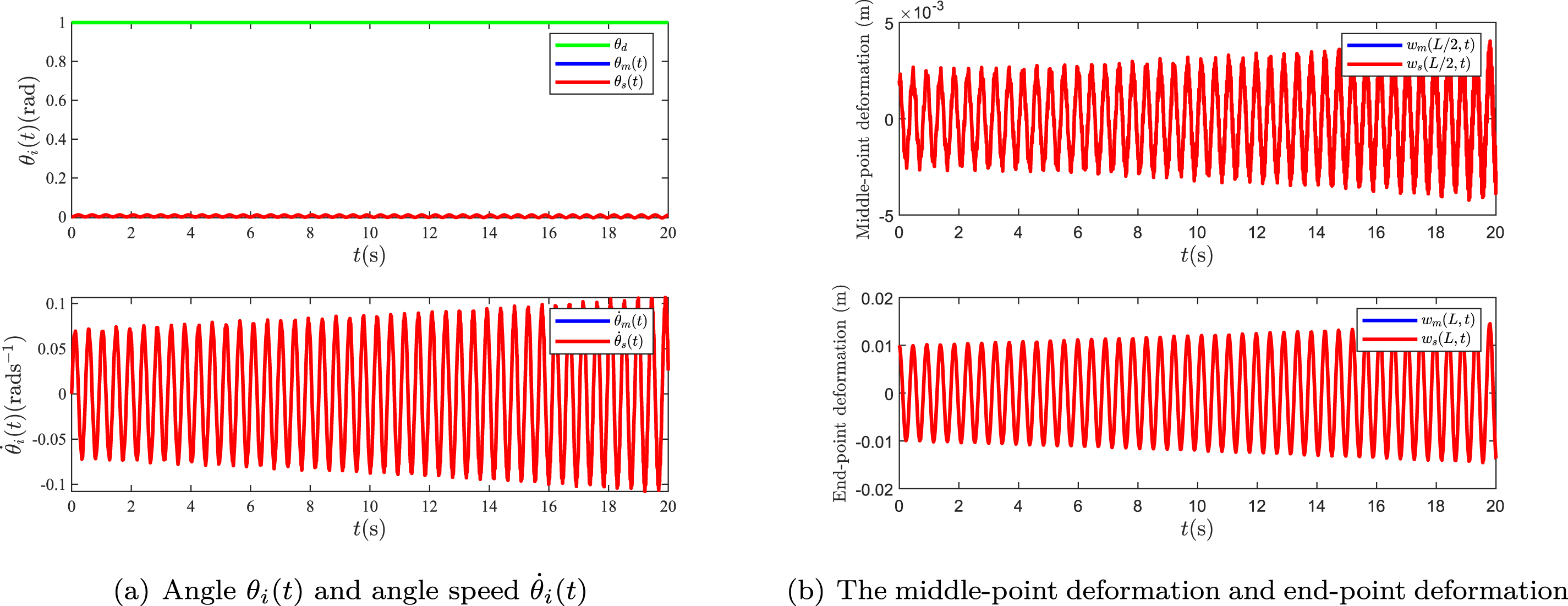
Quantitative results of vibration suppression under

Under identical communication delay condition, the proposed control scheme is compared with the method in reference Li et al. (2021). As shown in Figures 4–8 and Table 6, the system under Li et al.’s control scheme exhibits increased vibration amplitude, higher oscillation frequency, prolonged settling time, and high-frequency variations in the control signal when subjected to communication delay. In contrast, the proposed control scheme exhibits significantly smoother transient dynamics and faster convergence rates. These results demonstrate that the proposed control scheme can reduce the impact of communication delay on system stability.
Therefore, for MSFLM-BT system with communication delay, the proposed control scheme can achieve vibration suppression and angle coordination tracking. To sum up, the simulation results validate the efficacy of the control scheme.
5. Conclusion
This paper investigates the vibration suppression and coordinated control problem of a bilateral teleoperation system composed of master and slave flexible-link manipulators in the presence of communication delay. Using the PDE dynamics model of MSFLM-BT system, a corresponding control scheme is designed based on Lyapunov–Krasovskii function. Under this control scheme, system stability is ensured in the presence of communication delay, and vibration suppression and angle coordinated tracking of the system are achieved. Numerical simulation verifies the effectiveness of the control scheme. This study has the following limitations:
The model assumes fixed communication delays, whereas real-world networks typically experience time-varying or random delays. Future work could extend the proposed control scheme to handle time-varying delays via robust or adaptive strategies. In addition, the maximum limit of communication delay cannot be calculated quantitatively, we will strive to solve this problem in future research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported by the National Natural Science Foundation of China under Grant No. 62273020 and 62473009.
Appendix
According to Lemma 1–2, we can obtain