
Abstract
A non-singular fractional-order terminal sliding mode control method based on a fixed-time extended state observer (NFTSMC-FTESO) is proposed to address the susceptibility of linear magnetic levitation platform for computer numerical control (CNC) machine tools to nonlinearities, strong coupling, and other uncertainty perturbations. First, a novel FTESO is constructed to estimate the lumped perturbation of the system and compensate it into the control law to reduce the system chattering, and the observer converges quickly and does not need to know the upper bound of the perturbation derivatives compared with the conventional ESO. Second, a novel fixed-time FTSMC is designed using fixed-time theory and fractional-order differential calculus theory to improve the dynamic tracking performance of the system by adjusting the fractional-order operator to ensure that the system variables converge to the equilibrium point more quickly. Then, the proposed composite control strategy is proved to be globally fixed-time convergent and the convergence time is independent of the initial conditions using Lyapunov functions. Finally, the proposed control strategy is applied to a linear magnetic levitation platform for CNC machine tools and the effectiveness of the proposed method is verified. Compared with the traditional SMC and the new ESO based on NTSMC (NTSMC-NESO), the proposed control strategy improves the levitation accuracy by 50% with the steady state error within 4 μm. This method improves the machining accuracy of CNC machine tools and meets the needs of precision manufacturing.
Keywords
Introduction
Traditional CNC machine tool feed platforms employ a “ball screw” structure, but this driving method introduces issues of mechanical friction and deformation, which are detrimental to the high-precision machining of CNC machine tool (Liu et al., 2021; Liu et al., 2021; Zhou et al., 2023; Zhou et al., 2023). CNC machine tool feed stage with linear magnetic levitation synchronous motor (LMLSM) drive system achieves mutual independence between the feed stage and the stationary track by means of the levitation principle, which fundamentally solves the friction problem of conventional machine tools. However, due to the elimination of the intermediate drive mechanism, external disturbances and other uncertainties can directly affect the motor. Additionally, the shared magnetic field between the horizontal and levitation systems introduces electromagnetic coupling issues, making high-precision control of the levitation system more challenging. Therefore, designing a controller with high precision and strong robustness is essential to ensure the high-precision levitation of the LMLSM platform (Lei et al., 2024a).
Sliding mode control (SMC) is a widely used control method due to its robustness and immunity to interference (Fu and Zhao, 2023). The linear sliding mode surface, although simple in structure and parameters, converges the system state asymptotically to the equilibrium point. To address this, the concept of terminal sliding mode control (TSMC) was introduced, incorporating finite-time convergence (Zhu et al., 2024a). Wang et al. (2024) applied recursive TSMC to a permanent magnet linear synchronous motor (PMLSM), demonstrating through experiments that the proposed method offers better tracking accuracy and robustness. However, the finite-time convergence of system states limits its application in various engineering fields, such as missile interception (Cui et al., 2022a). To overcome this limitation, Polyakov A. (2012) proposed the concept of fixed-time stability, which was later applied to sliding mode control in Zuo (2014). Su et al. (2022) improved the fixed-time TSMC, enabling faster convergence of state variables. Zhang et al. (2022) designed a recursive fixed-time terminal sliding surface, successfully applying it to high-order systems with uncertain disturbances. While these studies achieved good control effects, they did not address the chattering issue inherent in SMC. Fractional-order sliding mode control (FSMC), which combines fractional-order theory with sliding mode control, has emerged as an important branch of SMC (Zhao and Wang, 2025a). Many scholars have applied FSMC to motor control (Zaihidee et al., 2019; Zhao and Wang, 2024). Zhu et al. (2024b) have proposed a novel FSMC strategy for the speed tracking problem of permanent magnet synchronous motor (PMSM) in the presence of external perturbations, but the control law does not contain fractional powers of the state variables, and convergence is slow as the system variables converge to the equilibrium point. In Zhou et al. (2024), a FSMC method based on the super-twisting algorithm is proposed and applied to a PMSM system. Simulation and experimental results show that the control method maintains good robustness under parameter uncertainties and external disturbances. However, it should be noted that the convergence time of the method is dependent on the initial state of the system, which is a limitation in fast response situations. Zhao and Wang (2025b) have proposed a position tracking strategy for permanent magnet linear synchronous motor based on variable gain fractional order terminal sliding mode control, which is an algorithm that achieves adaptive control by adjusting the gain parameters in real time. The above literature further improves the control performance of the system by improving the FSMC, but the convergence time of the above method depends on the initial state of the system, and the convergence time will be prolonged accordingly when the initial error is large, which restricts the application in fast-response situations.
The inherent coupling effects and external disturbances in LMLSM systems remain critical issues. However, excessive gain in SMC can lead to severe chattering. To mitigate chattering, introducing disturbance estimation into SMC is an effective approach (Zou et al. 2024). By extending disturbances as new state variables, the extended state observer (ESO) reduces dependency on system parameters and enhances robustness. In Cui et al. (2022b), the sigmoid function was used to replace the traditional sign function and applied to a motor rotor levitation control system, but the estimation error converges asymptotically. Inspired by fixed-time theory, ESO with fixed-time convergence properties has garnered attention. Wang et al. (2023) have designed a model predictive control strategy based on improved ESO to achieve high-accuracy closed-loop control of PMSM systems, but the proposed observer has only finite-time convergence characteristics, which affects the convergence of the overall control strategy. Hong et al. (2024) have further improved the design of the observer, and proposed a FTESO to compensate for the disturbances and derive the convergence time. Lei et al. (2024b) proposed a FTSMC strategy based on an adaptive FTESO to deal with the problems of nonlinearities, strong coupling, and uncertainties in linear maglev synchronous motor system. The strategy estimates the system uncertainty and external disturbances in real time by means of an adaptive observer. The observers proposed in the above literature can accurately estimate the perturbations, but all of them need to obtain the upper bound information of the perturbation derivatives in advance; however, in practical engineering applications, the derivatives of the perturbations are often difficult to be measured directly, which limits their wide applications.
Inspired by the aforementioned literature, this paper proposes a NFTSMC-FTESO method. The contributions of this paper are as follows: (1) A novel FTESO method is proposed for system uncertainties and perturbations, which does not require the derivative information of the perturbations to improve the practicality of the observer compared with the traditional ESO. The fixed-time convergence property of the proposed observer is proved by using homogeneous Lyapunov functions. (2) Based on the fixed-time theory, a novel fixed-time NFTSMC controller is designed using fractional-order micro-integral operators to improve the control performance and saturation functions to avoid the singularity problem. (3) Experimental validation is carried out on the LMLSM platform and compared with NTSMC and NTSMC based on a novel extended state observer (NTSMC-NESO). The experimental results show that the proposed control strategy has higher tracking accuracy and stronger disturbance rejection capability.
Description
Notation: Define
Tian et al. (2017): If a function Then,


Bhat and Bernstein (2005): If the continuous real-valued functions F1(

Wang et al. (2022): If

Caputo calculus definition and lemmas
Xue (2018): The α order integral of a function f(t) is defined as follows: The α order differential is defined as



Song et al. (2020): Let

Consider the following ordinary differential equation:


Polyakov (2012): If there exists a continuously differentiable positive definite function V:


Ding and Liu (2022): If there exists a continuous positive definite function V(t), such that


LMLSM operation mechanism and mathematical model of maglev system
The structure of the LMLSM maglev feeding stage is shown in Figure 1. Structure of LMLSM magnetic levitation feeding stage.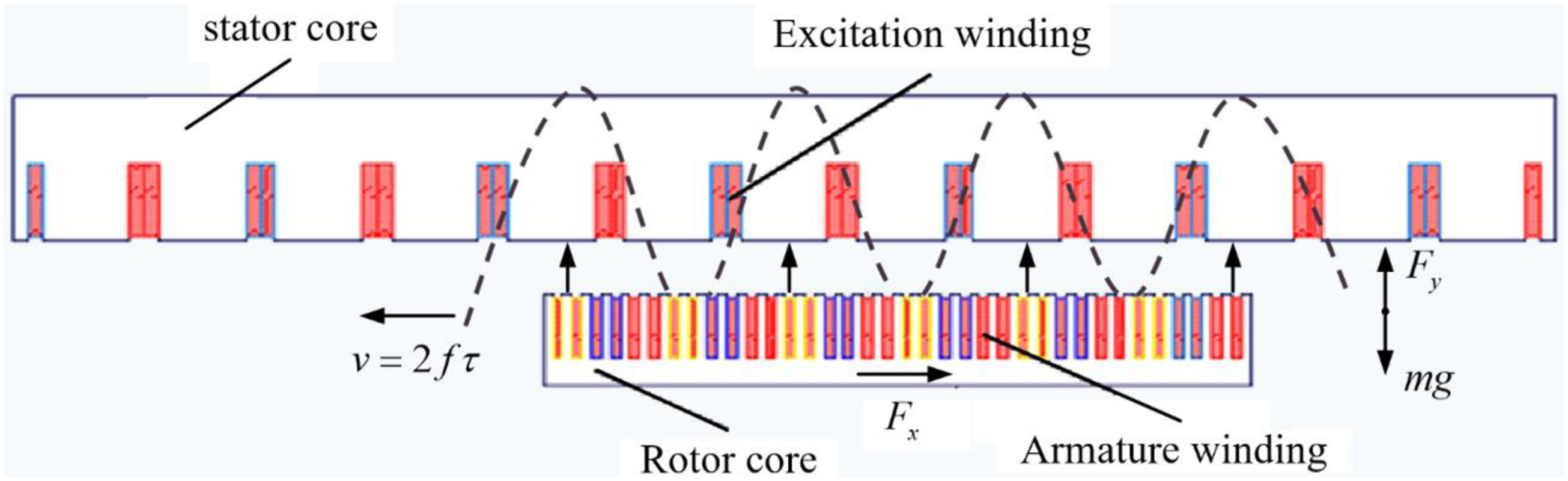
When the excitation winding is energized with direct current, an excitation magnetic field is generated in the air gap between the moving platform and the excitation winding. This excitation magnetic field then generates an electromagnetic force of levitation on the moving platform. By adjusting the excitation current, the moving platform can be guaranteed to levitate stably.
When the armature winding is energized with three-phase alternating current, a traveling wave magnetic field is generated in the air gap, and the interaction between the traveling wave magnetic field and the excitation magnetic field generates electromagnetic thrust in the horizontal direction, which pushes the actuator platform to run in a straight line.
The voltage equation for the excitation loop of the LMLSM maglev system is given by

The maglev force equation is as follows (Lan et al. 2021):
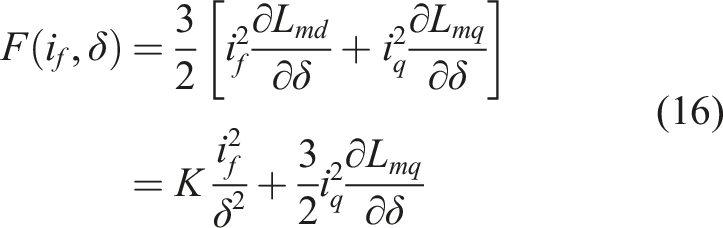
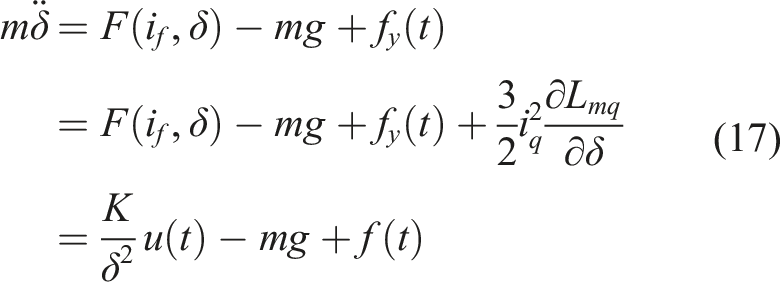
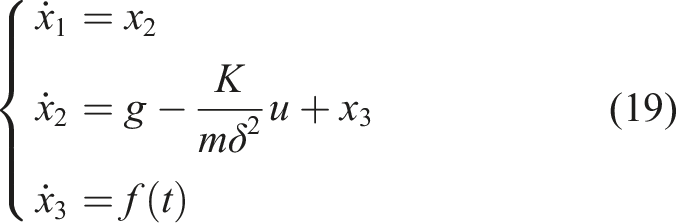
Combining equation (16), the equations of motion for the LMLSM magnetic levitation system can be obtained as
LMLSM servo system
Figure 2 illustrates the LMLSM servo system control block diagram. LMLSM servo system control block diagram.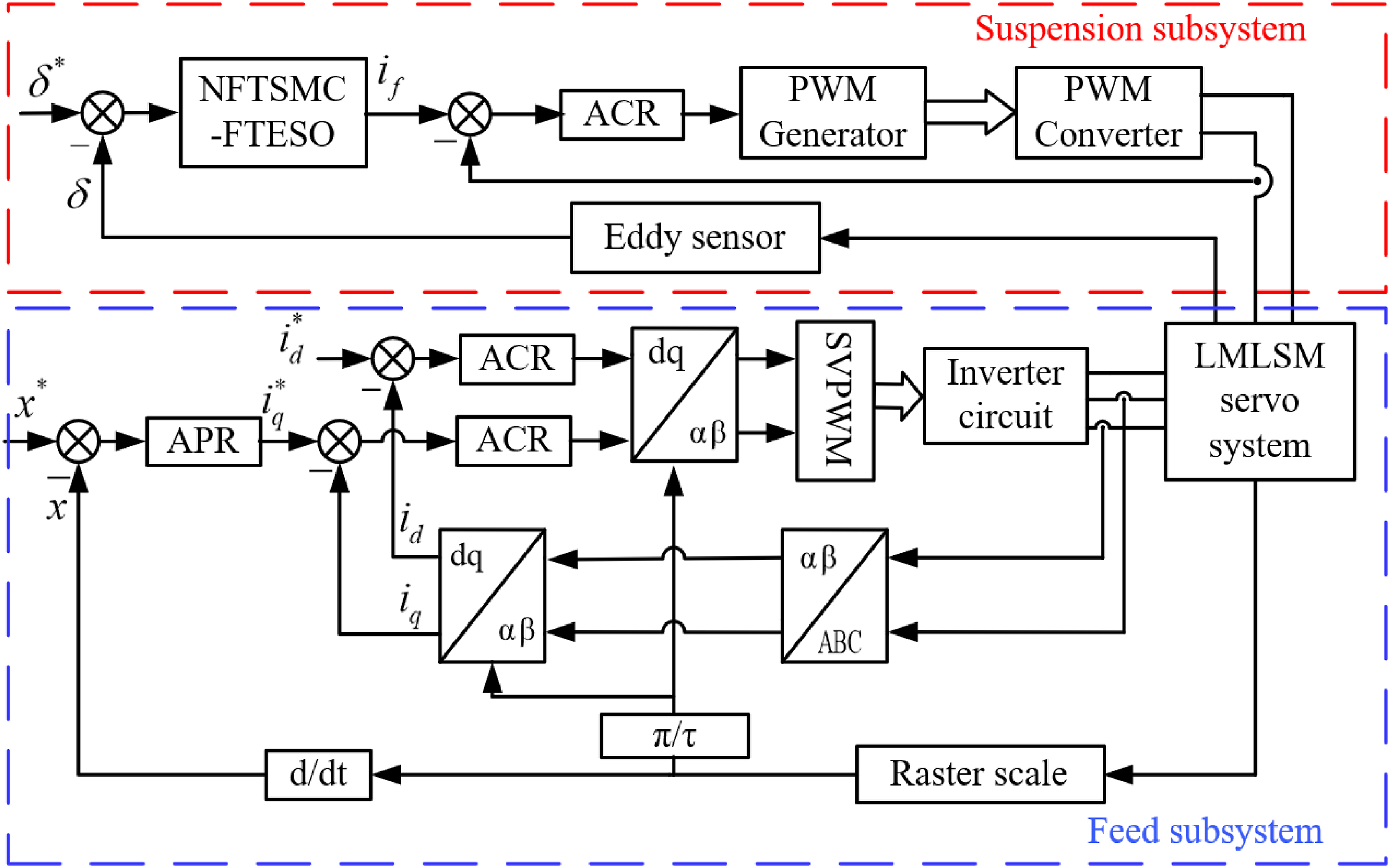
From Figure 2, it can be seen that the LMLSM system is divided into a levitation subsystem and a horizontal subsystem, and the focus of this paper is on designing the height ring of the levitation subsystem to ensure that the system is levitated stably with high accuracy. From equation (17), it can be seen that the aggregate perturbations of the LMLSM levitation system include coupling effects and load perturbations, and their boundaries are difficult to obtain in advance. Therefore, it is necessary to design the controller to improve the control accuracy of the levitation system and eliminate the effects of the lumped disturbances on the system.
Controller design
Figure 3 shows the block diagram of the FTESO-based NFTSMC. The design process of the control algorithm is derived in detail in the following two subsections. Block diagram of FTESO-based NFTSMC.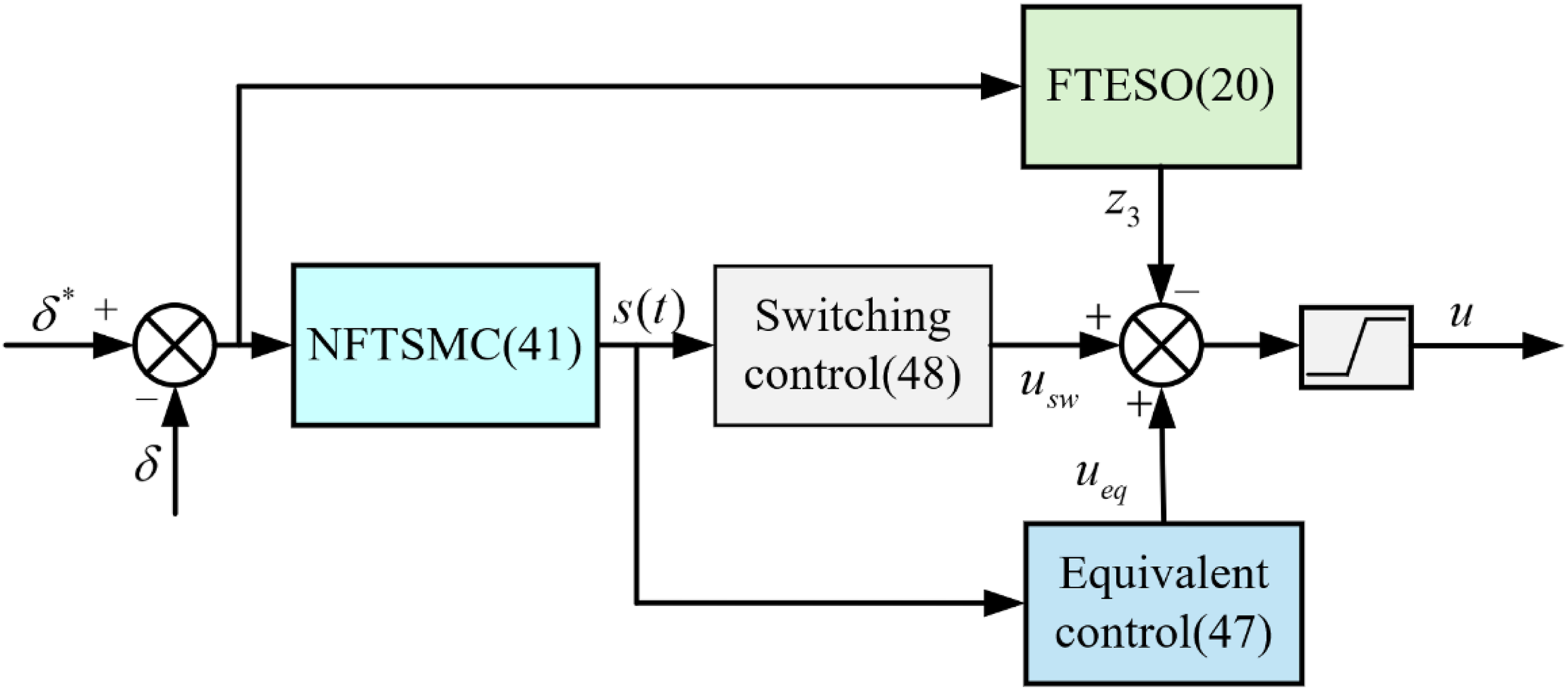
Fixed-time expanded state observer design
Since the uncertain disturbances of the LMLSM system can lead to a serious chattering problem of the controller, FTESO is designed to compensate the disturbances by decreasing the controller gain to achieve the purpose of weakening the chattering and ensuring that the estimation error converges in a fixed time.
Define the LMLSM suspension error as

By expanding the total perturbations into new state variables and combining equations (18) and (19), the tracking error equation for the suspension system is obtained as
Design a new FTESO as follows:
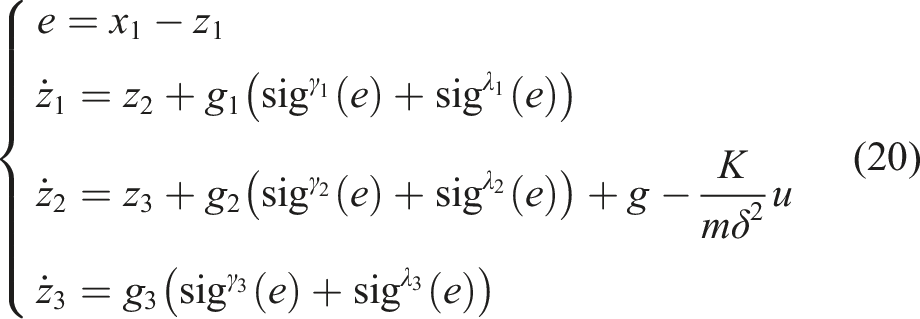
The proposed FTESO estimates the total system set perturbation in fixed time and the convergence time is

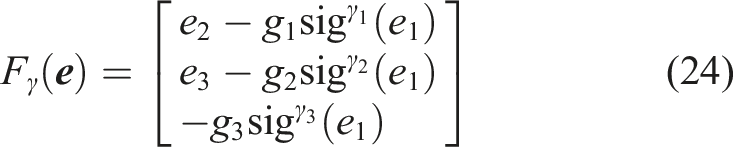
Define e2 = x2 − z2, e3 = f(t) − z3, and the error equation can be obtained from equation (21) as Define By Definition 1, F
γ
( Define the Lyapunov function It can be shown that the Lie derivative L
F
V
γ
( Similarly, we consider the following system separately: By Definition 1,
For the complete ground error equation (23), construct the Lyapunov function By Lemma 2, ∂V
λ
( Combining equations (28), (32), and (35), it can be deduced that equation (34) satisfies There exists According to equations (37) and (38), and Lemma 5, the fixed time convergence from V0( According to equation (38), the estimation error ς converges at fixed time T1 to the following equation: In addition, it is possible to obtain














In comparison with the existing ESO in Wang et al. (2023), inequality (21) shows that the expression for the settling time does not involve the initial estimated state and depends only on the design parameters. Furthermore, unlike the FTESOs in Hong et al. (2024), the upper bound on the perturbation derivative is no longer required in the design of the switching gain. Therefore, it is easier to implement in practical applications due to the minimum number of design parameters.
FTESO-based NFTSMC design
The fixed time non-singular fractional order sliding mode surface is

The designed fractional order sliding mode surface ensures that the system state converges to zero in a fixed time.
Define the Lyapunov function When the sliding mold surface is reached there is By Lemma 3, the fractional order derivative of V1 can be obtained Substituting (44) into (45) yields According to Lemma 6, the sliding mode surface (42) ensures that the system state converges to the origin at a fixed time, and its convergence time satisfies the following conditions: On the other hand, according to the theory of sliding modes and Lemma 4, it can be obtained that According to the system equations and The fixed time fractional order convergence law is designed as






Compared with sliding mode surface s1 = x2 + βD−λx1 in Zhu et al. (2024a), when From equation (48), it can be seen that the equivalent control u
eq
contains the singular term Therefore, the NFTSMC-FTESO control law u is

The control law designed according to equation (52) is such that the system can be stabilized at a fixed time and its convergence time satisfies the following condition:
Define the Lyapunov function Taking the time derivative, one obtains According to Theorem 1, the perturbation estimation error can converge to zero in time T1, with e3 = f(t) − z3 = 0. Then there are According to Lemma 5, the proposed controller ensures that the system converges to the origin in a fixed time of

According to the literature (Ni et al., 2016), the design of the saturation function does not affect the stability proof and the fixed-time convergence property.
Parameter tuning rules
In practical applications, a reasonable selection of controller parameters is crucial for high performance control of LMLSM. To ensure the convergence and robustness of the system, we will discuss the parameter selection guidelines for the proposed controller.
Selections of a1, a2, α1, α2 and α. Parameters a1, a2, α1, α2, and α affect the sliding mold surface dynamics in (41). The performance comparison for different values of a1 is shown in Figure 4. It can be found that a1 affects the convergence speed of the system. When a1 = 5, the system converges the slowest but has the least chattering. When a1 = 7, 9, the system converges slightly faster, but the amplitude of the system output chattering increases significantly. It can be concluded that the larger these parameters are, the faster the system converges, but the larger the output of the controller. Therefore, for high precision control of LMLSM, it is important to carefully select values that are not extreme and to focus on the characteristics of the controller. In this study, we chose a1 = 7, a2 = 3, α1 = 0.6, α2 = 1.4, α = 0.9. Performance comparison for different a1 values. (a) Suspension height response curve; (b) Excitation current response curve.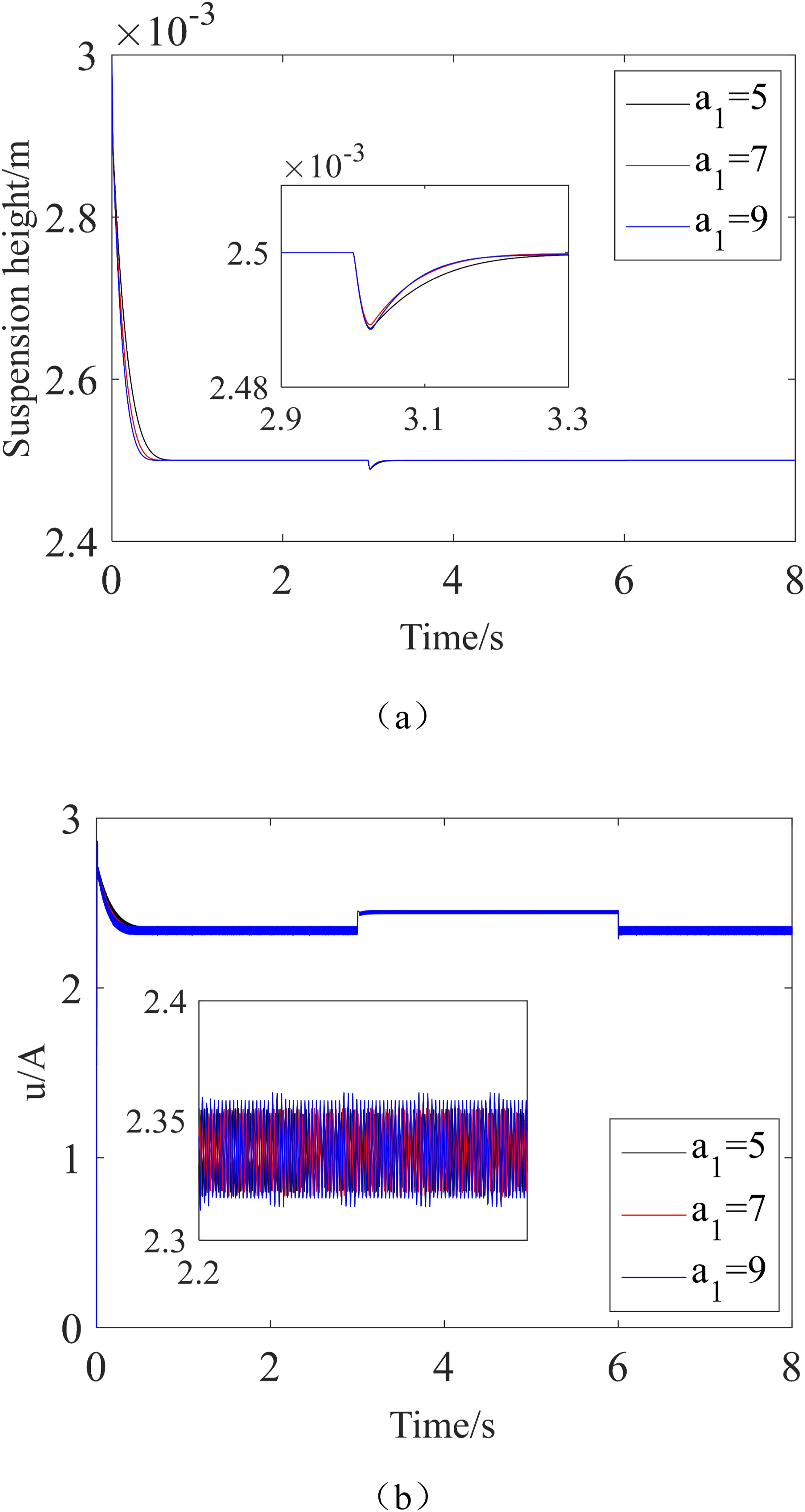
Selections of k1, k2, β1, β2. The performance comparison for different values of k1 is shown in Figure 5. Larger values of k1 and k2 will speed up the convergence of the sliding mode variables and improve the system robustness, but will significantly increase the value of the controller chattering amplitude; larger values of β1 and β2 will improve the system control accuracy, but too large values may lead to oversaturation of the control inputs. We choose k1 = 5, k2 = 5, β1 = 0.8, β2 = 1.2. Performance comparison for different k1 values. (a) Suspension height response curve; (b) Excitation current response curve.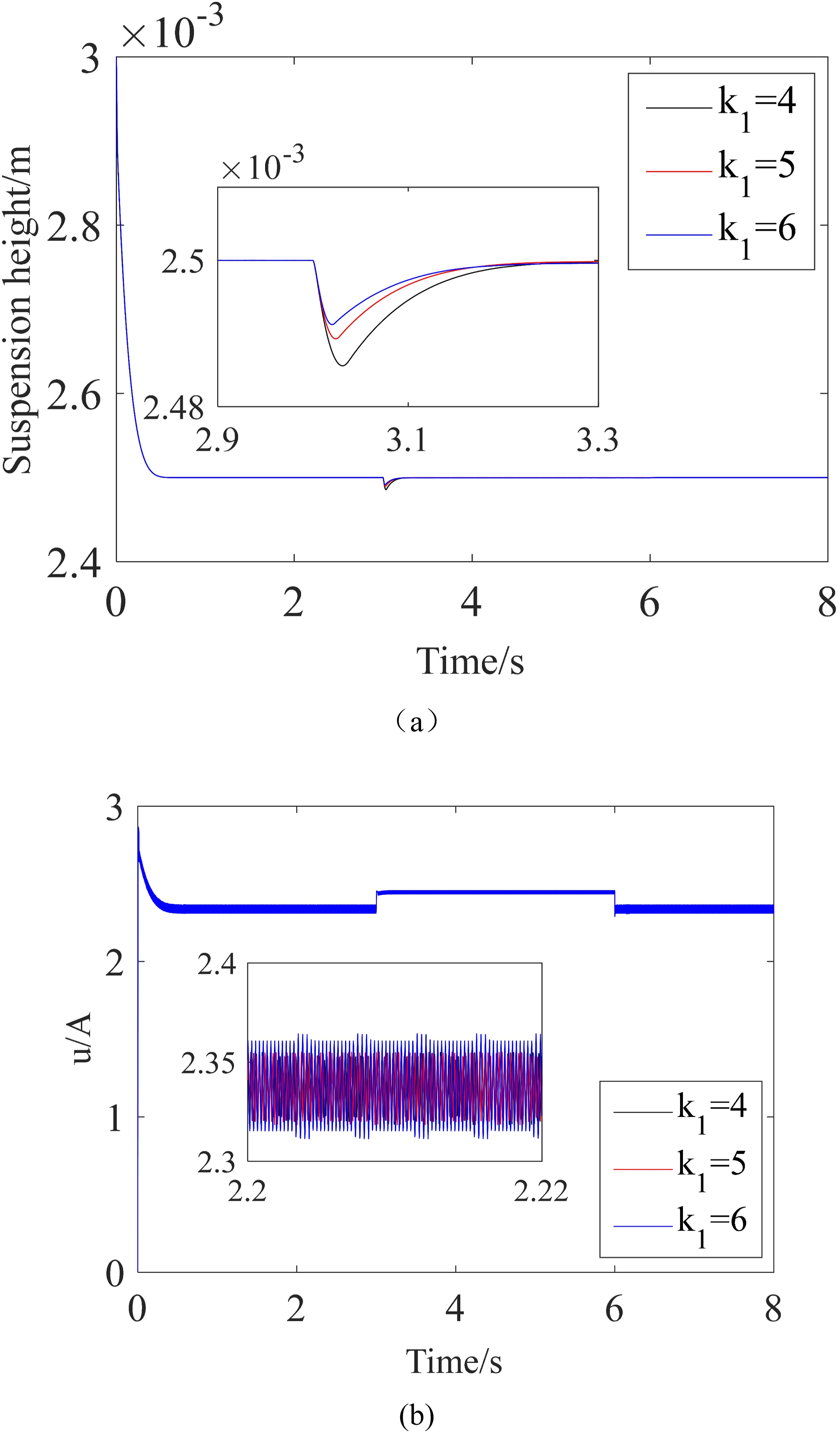
Selections of g1, g2, g3, γ. g1, g2, and g3 are the gains of the FTESO, which converge to the estimate faster when their values are chosen too large, but introduce high-frequency noise. The selection of γ affects the estimation accuracy of the observer. In order to weigh the accuracy and the peak phenomenon, we choose γ = 0.85, g1 = 8, g2 = 25, g3 = 34.
Experimental verification and analysis
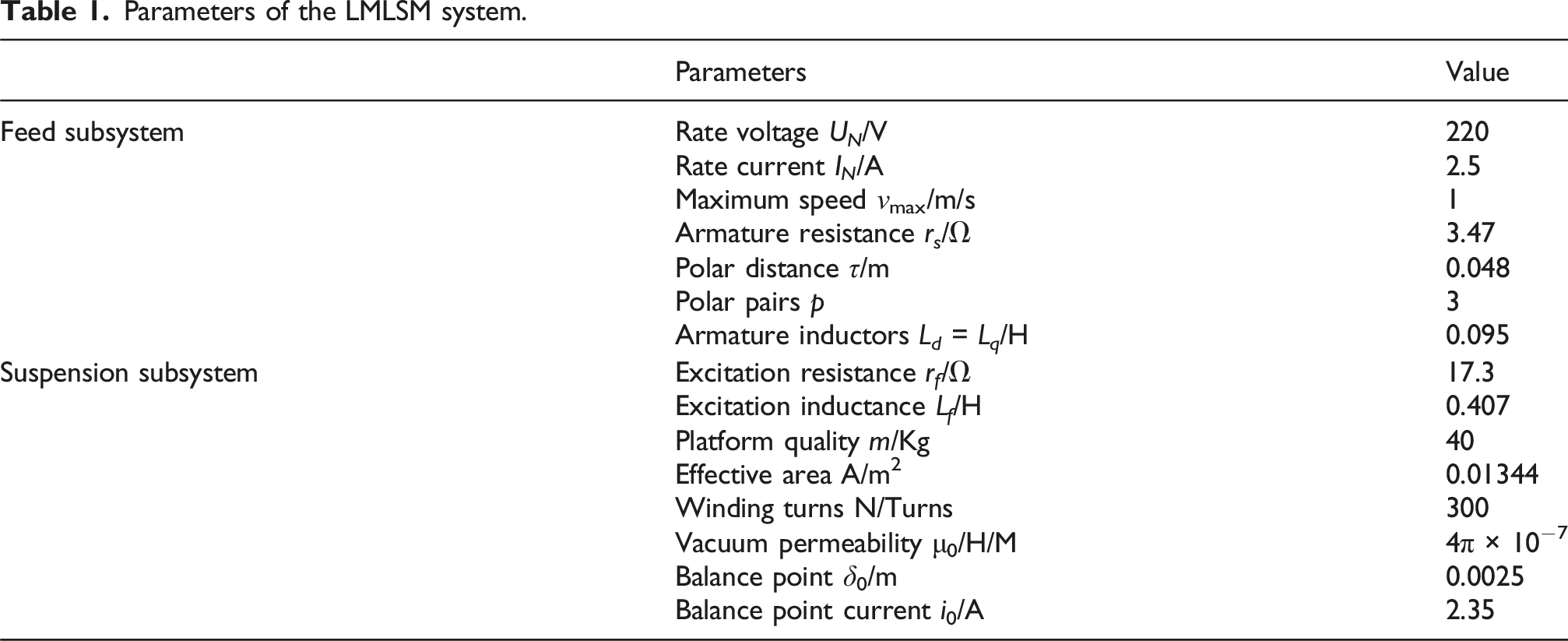
In order to evaluate the control performance of the proposed strategy, experimental validation is carried out on the LMLSM system platform and compared with NTSMC (Lei and Zhang, 2024) as well as NTSMC-NESO (Yue et al., 2022). The LMLSM experimental platform is shown in Figure 6, and the parameters of the LMLSM maglev system are given in Table 1. As can be seen in Figure 6, the LMLSM has two control systems to control the horizontal motion and levitation motion, respectively. The experimental control cores are DSP TMS320F28335. Horizontal motion measurements are made using linear scale model SGC-4.2T600 with a maximum resolution of 0.5 μ m. Suspension motion is the use of eddy current displacement sensor model RP6608, the highest resolution for 0.1 μ m. The current loop sampling frequency is 10 KHz. LMLSM control system platform diagram. Parameters of the LMLSM system.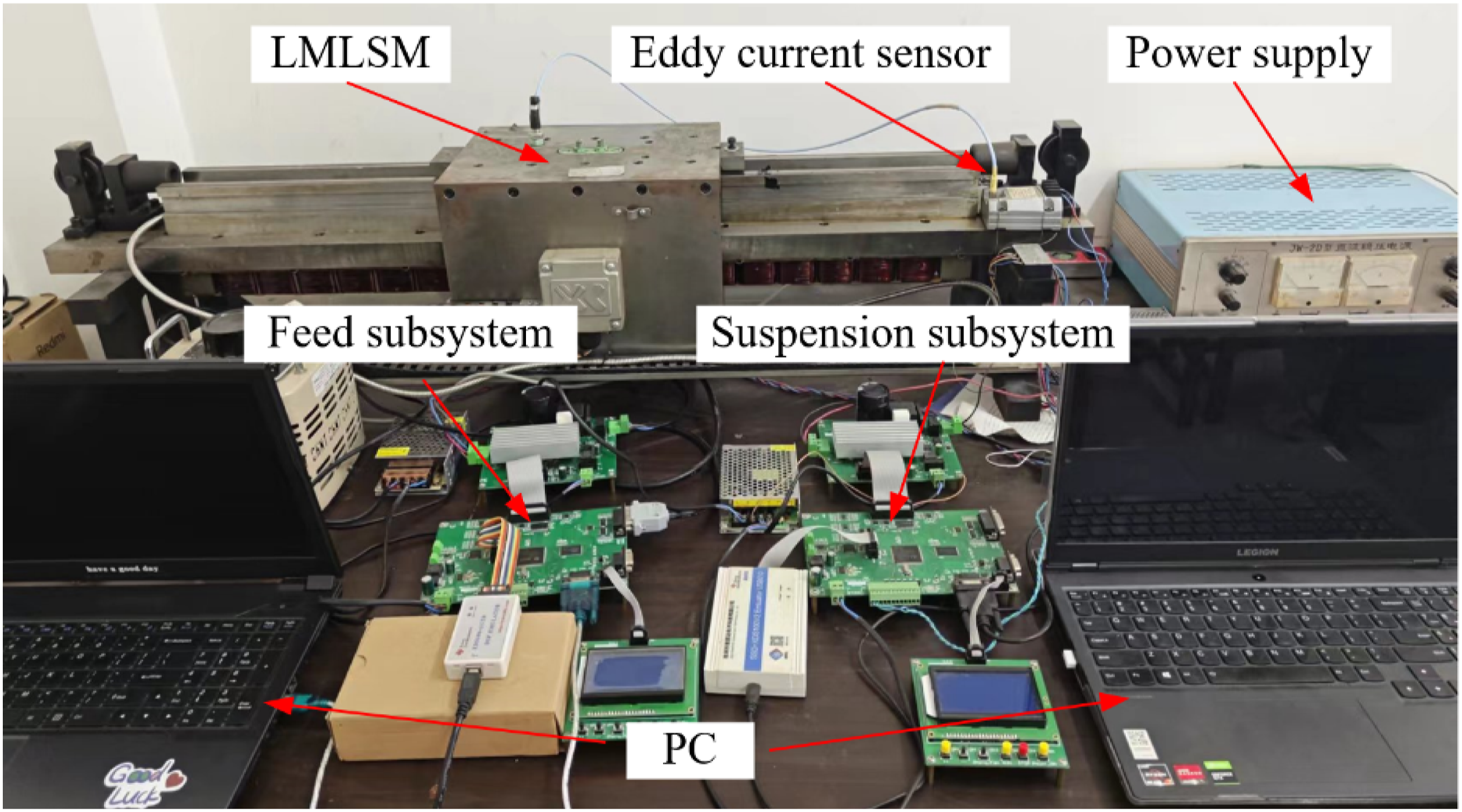
The control board is connected to the computer via an emulator and the controller is programmed using the software CCS11.0 on the computer. The control board is connected to the computer through the RS232 communication interface to transmit data to the data logging oscilloscope. The data logging oscilloscope has a four-channel data acquisition function and can acquire four channels of data at one time.
In order to evaluate the performance of different control methods, the position tracking error is measured using four metrics: the maximum absolute value TEmax, the absolute mean value TEmean, root-mean-square TERMSE and ttest.


Analyze the no-load startup performance of the LMLSM suspension system
Initial suspension height δ0 = 0.003 m, given the suspension height δ* = 0.0025 m. Figure 7 depicts the no-load startup response for different control algorithms. Response curve of suspension error at startup.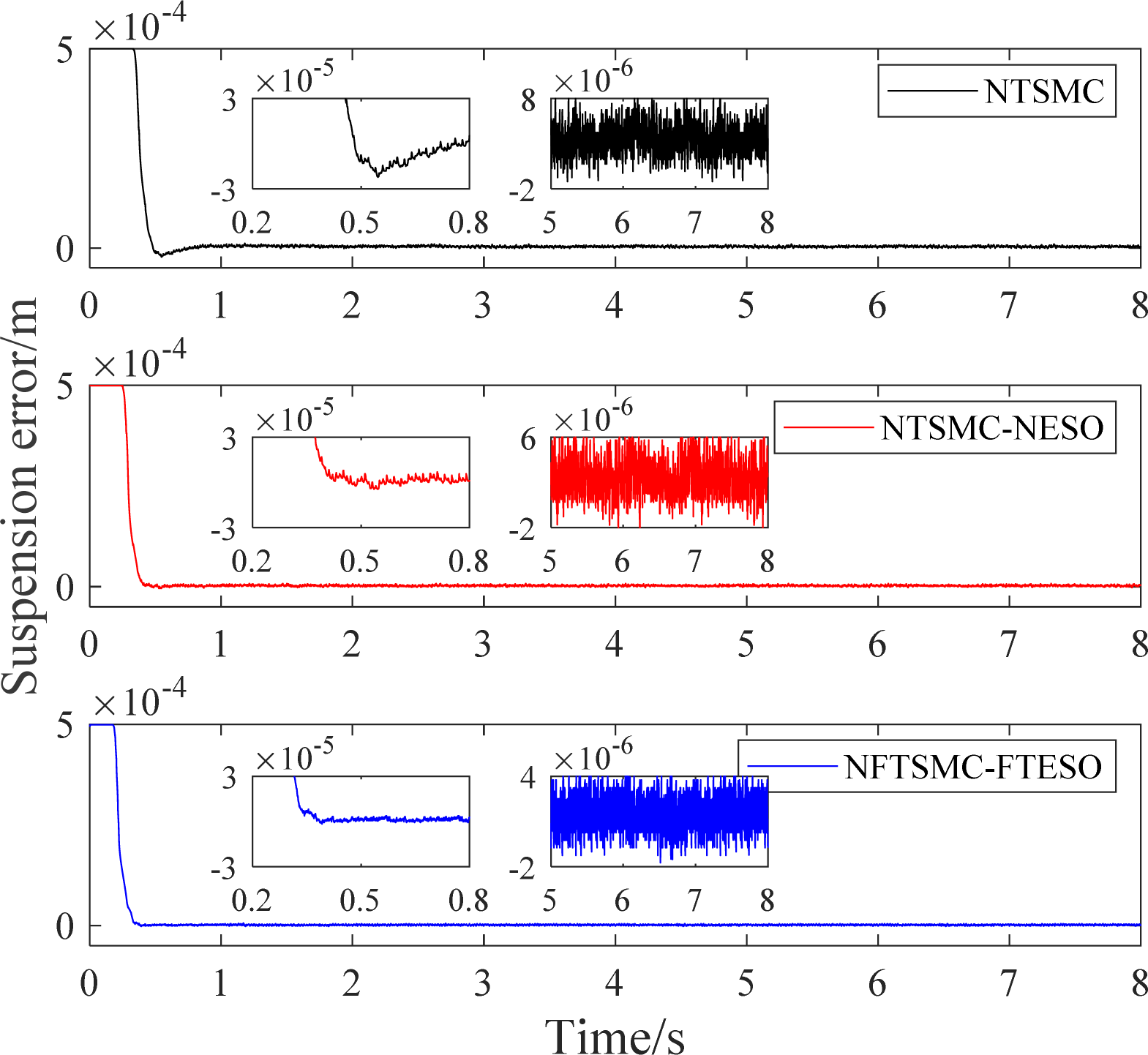
From Figure 7, it can be seen that all the three algorithms can maintain stable levitation well, and the stable levitation time and steady state error of the proposed method are 0.4 s and 4 μ m, respectively, which are significantly smaller than the 0.8 s and 8 μ m of NFTSMC and the 0.6 s and 6 μ m of NTSMC-NESO. The proposed formula can effectively improve the levitation accuracy and convergence speed of the system, which is attributed to the design of the fixed-time fractional-order sliding mode surface.
Analyze the immunity performance of the LMLSM suspension system
To further verify the immunity of the proposed method, a perturbation of 10% of the rated load is applied abruptly at 3 s and the load perturbation is removed at 6 s. Figures 8 and 9 depict the suspension error and excitation current response curves under load perturbation, respectively. Response curve of suspension error under load perturbation. Response curve of excitation current under load disturbance.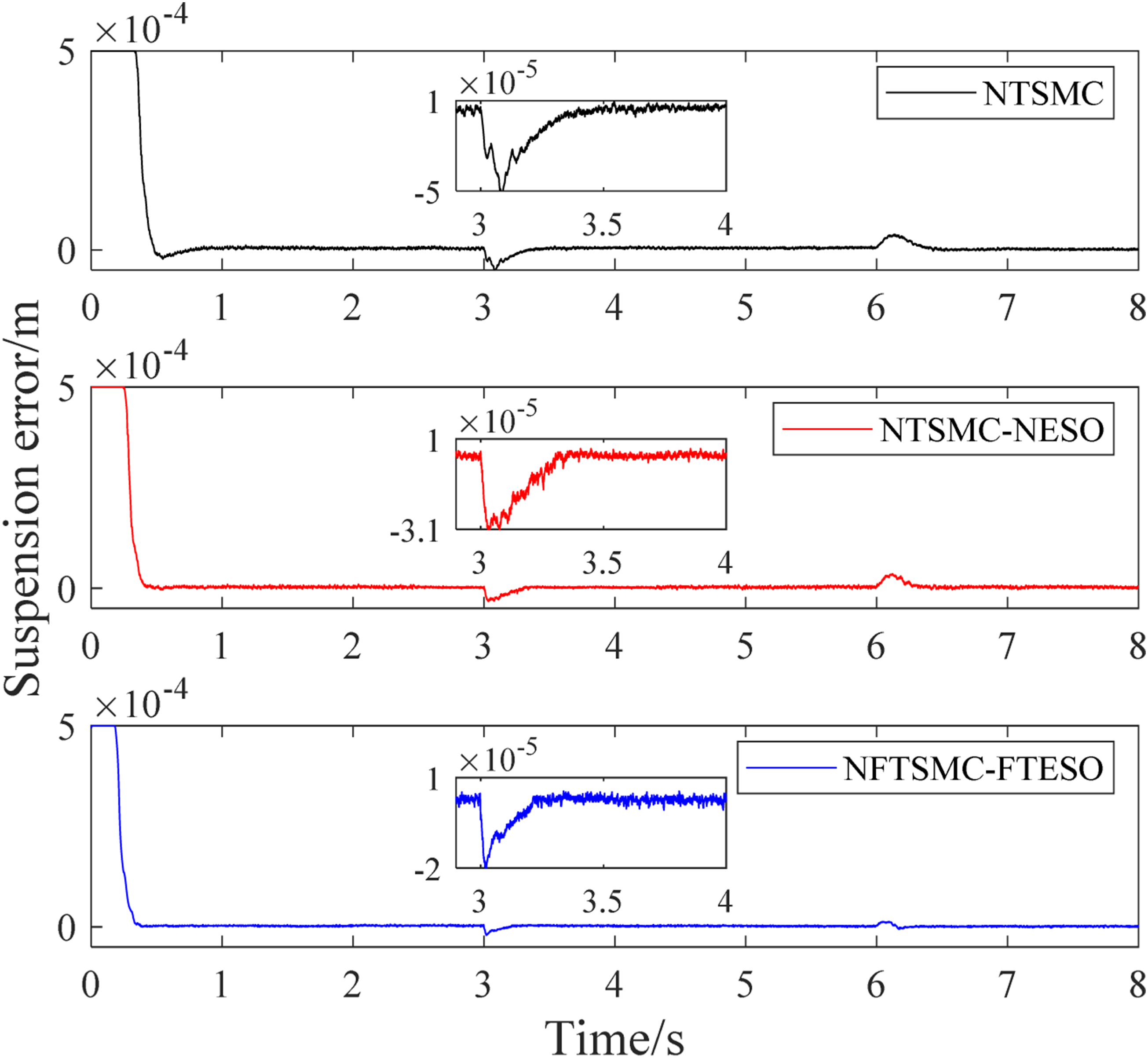
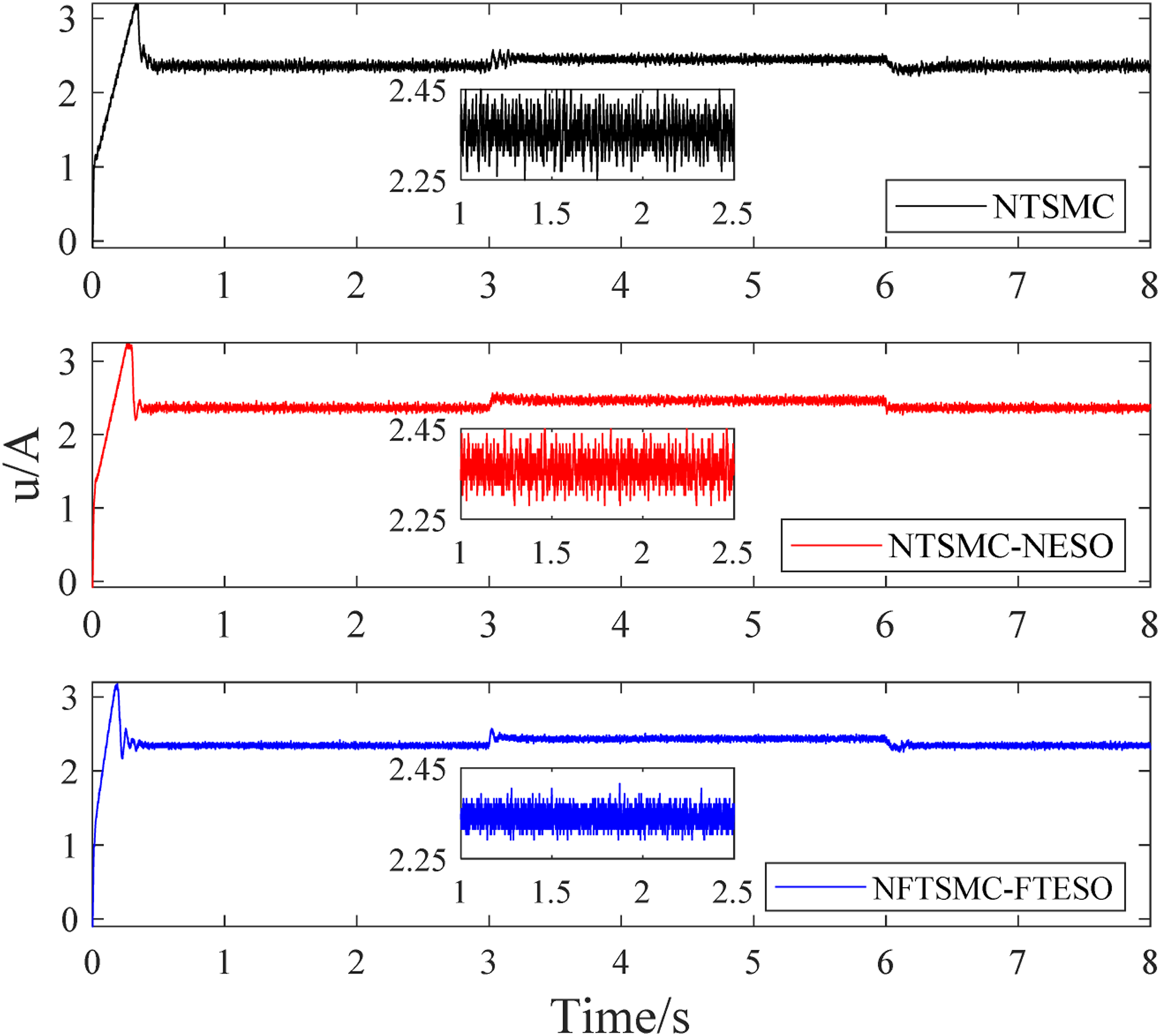
Performance comparison of different algorithms under load perturbation.

Analyze the coupling performance of the LMLSM suspension system
Since the suspension subsystem and the horizontal subsystem of the LMLSM share a common magnetic field, there is a coupling problem between the two systems as can be seen from the dynamics model of the magnetic levitation system (16). The coupling problem is an important reason that affects the high accuracy of the LMLSM system. In order to verify the ability of the method in this paper to suppress the coupling problem of the system, the horizontal system is given a horizontal reciprocating motion 0.02 sin(5t) at 5 s. Figures 10 and 11 depict the levitation error and excitation current response curves under the coupling effect, respectively. Response curve of suspension error under coupling effect. Response curve of excitation current under coupling effect.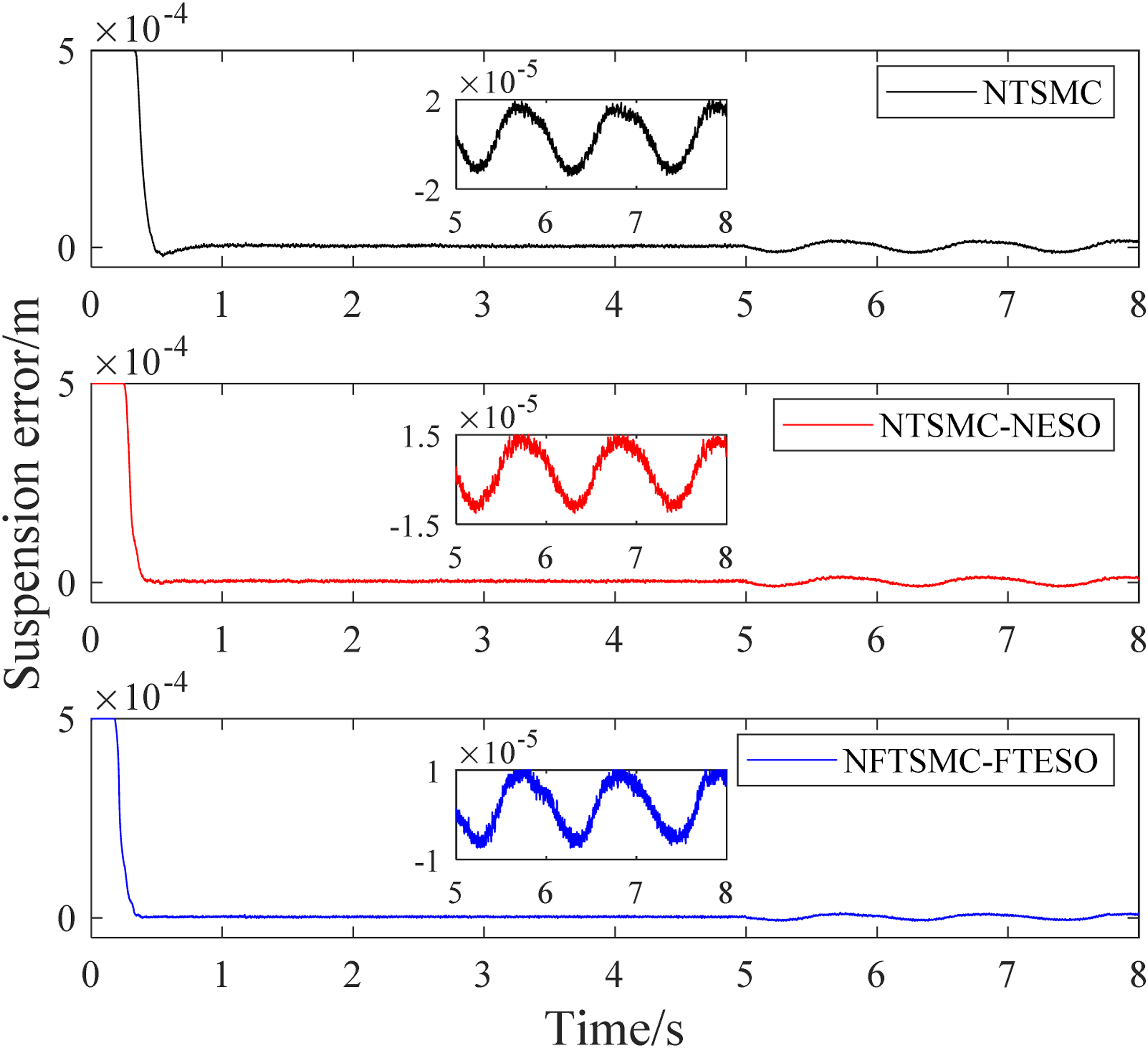
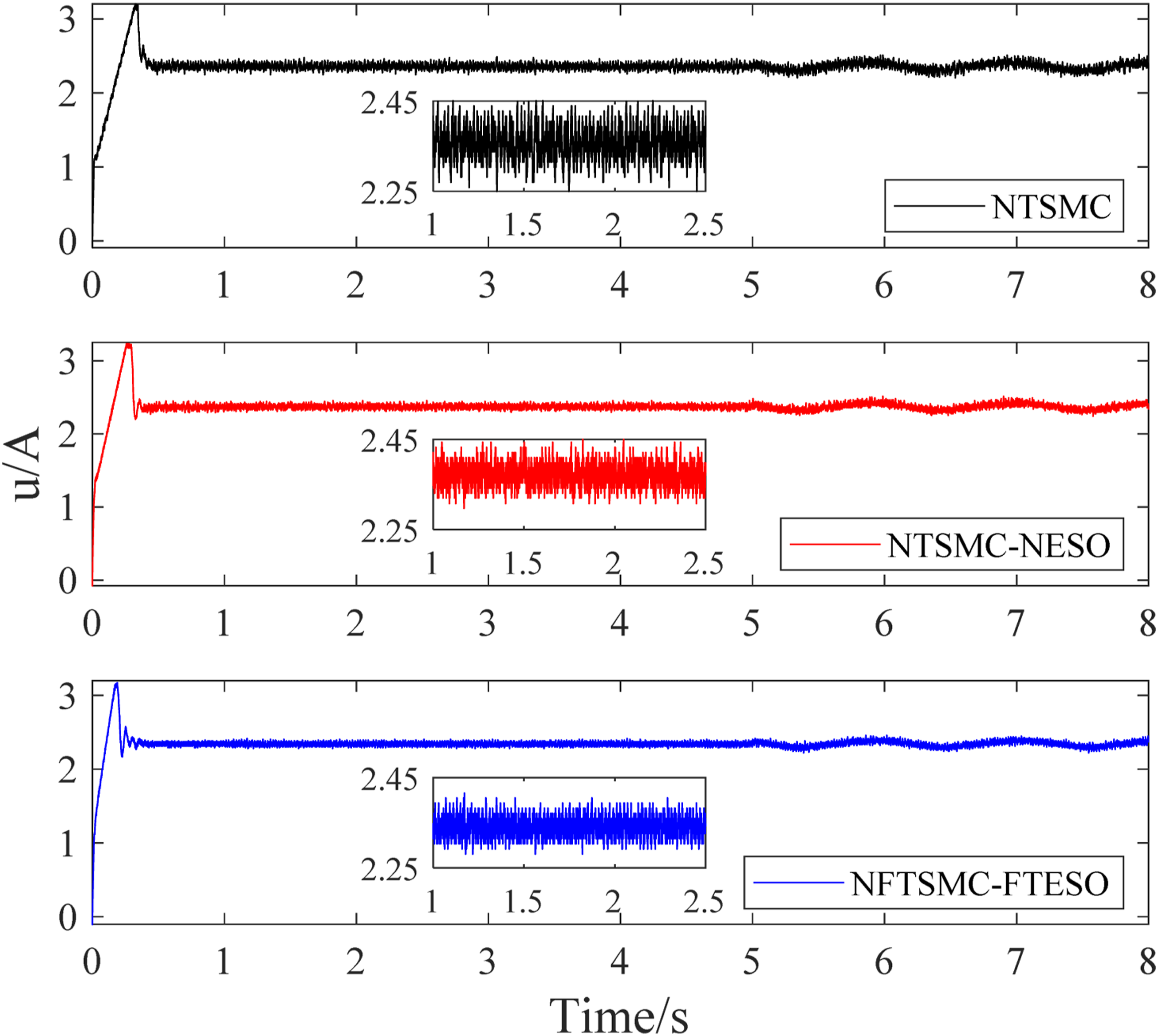
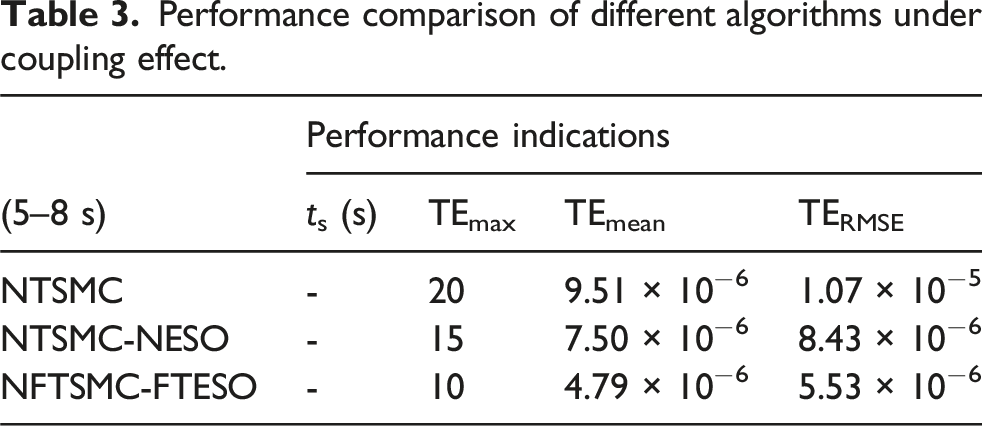
Performance comparison of different algorithms under coupling effect.
Conclusions
In this paper, a FTESO based on NFTSMC scheme is proposed for the levitation control of linear magnetic levitation platform for CNC machine tools under uncertain perturbations, which achieves fast convergence in a fixed time without the need of perturbing the upper-bound information by designing a new FTESO. A fast FSM surface is further proposed, which not only significantly improves the convergence speed of the error variables, but also effectively suppresses the system chattering. Then, a rigorous analysis based on Lyapunov stability theory confirms that the closed-loop system has a global fixed-time convergence property. To verify the effectiveness of the proposed method, a comparative experimental study is carried out on the LMLSM control platform. The experimental results show that compared with the traditional SMC and the new ESO based on NTSMC (NTSMC-NESO), the regulation time during no-load startup is reduced by 33%, the overshoot during sudden loading is reduced by 37%, and the recovery time is reduced by 7.5%, which has the advantages of fast convergence and high robustness. In our future work, we will further enhance the optimization of the parameter tuning so that the presented control strategy can be more readily applied to more high-precision applications.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China (52477012), Shandong Province Key R&D Programme (2023JMRH0303, 2023CXPT089), and Natural Science Foundation of Shandong (ZR2024ME115).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.