
Abstract
For parallel manipulators, traditional trajectory tracking techniques suffer from input saturation and external disturbances, which results in poor transient responsiveness and decreased control accuracy. In order to guarantee quick and reliable trajectory tracking under such limitations, this study suggests an improved control approach that combines adaptive barrier functions with terminal sliding mode control. First, a compensator is added to lessen the consequences of input saturation. Then, for finite-time tracking, a new terminal sliding surface is constructed, which is based on tracking error and an auxiliary variable connected to the compensator. To reject time-varying disturbances, the adaptive barrier function is further expanded. The whole system’s finite-time stability is guaranteed by applying Lyapunov theory. The enhanced tracking performance of the proposed method over traditional approaches is demonstrated by simulation results. Compared to SOSMC and NTSMC, the proposed controller achieves up to 14% improvement in performance indices and 31% faster convergence, highlighting its effectiveness for precise trajectory tracking in parallel robots. Additionally, the effectiveness of the suggested controller is validated by real-time experiments on a physical parallel manipulator. The resilience of the approach against real-world uncertainties, including sensor noise, unmodeled dynamics, and actuator nonlinearities, is confirmed by this high correlation. All things considered, the suggested method provides a dependable and effective way to track trajectories in applications requiring a high degree of precision and utilizing parallel manipulators.
Keywords
Introduction
Motivation and background
Parallel manipulators, often referred to as parallel robots (PRs), represent a category of closed-chain kinematic structures in which several independent limbs or kinematic chains concurrently connect a stationary base to a mobile platform. In contrast to serial manipulators—where motion is transmitted sequentially through a single chain of actuators—parallel robots distribute actuation forces and motions across multiple branches simultaneously. This architecture results in enhanced structural rigidity, improved positioning accuracy, and superior dynamic response, making them particularly advantageous for high-speed and precision-demanding applications (Liu et al., 2024b; Merlet, 2006; Zhao et al., 2025). The main reason for this interest is the benefits they provide over traditional serial models, such as greater accuracy, rigorousness, and increased velocity and acceleration features (Briot and Khalil, 2015b; Chen et al., 2024). As a result, parallel manipulators show potential for various uses like machining (Zhang, 2009), operations involving picking up objects and placing them elsewhere (Nabat et al., 2005), 3D printing (Seward and Bonev, 2014), and touch-based interfaces (Birglen et al., 2002; Saafi et al., 2015). These manipulators are made up of secure chains of jointed stiff body systems (Khalil and Dombre, 2004). Creating accurate dynamic models for these robots is a difficult and complex job due to the need to work with a significant number of stiff bodies. Motions equation have to be established using a distinct group of joint coordinates, particularly the joints that are controlled by an external force. Hence, designing control systems for parallel manipulators is recognized as challenging (Boschetti and Minto, 2025; Cheng et al., 2003). The shortened dynamic models capturing just the most important features related to inertia of the manipulator may have to be utilized due to the difficulty of the model (Pierrot et al., 1990). Furthermore, one must also take into account unidentified joint frictions and ambiguities in inertial factors, such as those resulting from unfamiliar payloads. Robust and/or adaptive control structures are necessary to handle the unmodeled dynamics that arise from these popularizations in order to achieve high precision.
Literature review
One of the efficient control methods that has been applied for the control of the PR systems is the Proportional-Integral-Derivative (PID) control scheme. As a novel configuration of a 3-DOF PR system, a PID controller which may asymptotically follow a chosen reference signal is suggested in (Ruiz-Hidalgo et al., 2019). In reference (Ren et al., 2007), the effects of PI harmonized control and classic PID control methods on tracking precision of a 3-DOF planar parallel manipulator were assessed. Su et al. (2006) established a combined control input that can bring both position and harmonization errors to the origin and it includes a PD control and a PI control signal with input saturation. Unfortunately, the ability of kinematic control systems to follow a trajectory at a high speed is not guaranteed, despite their ability to function well at low speeds. As a result, the certain contemporary and sophisticated control algorithms are added to the established PID control system. Reference (Wang et al., 1995) uses a three-layer backpropagation neural-network approach, where may minimize trajectory tracking errors. A novel control technique and traditional PID control are combined in a controller presented in reference (Li and Wang, 2009) to improve system’s adaptability, where the result is a robust system. Whereas high-speed PRs are a nonlinear, heavily coupled system and highly accurate robot control cannot be achieved by contemplating solely kinematics. The impact of dynamic factors on control is also increasingly apparent as robot speed increases. As a result, it is important to research control algorithms for high-speed PRs that take dynamic characteristics into account. For this reason, the Sliding Mode Control (SMC), has been expended in an extensive variety of industrial applications because of its considerable resilience against nonlinear coupled system (Li et al., 2021; Van et al., 2016; Zhang and Hua, 2022). Some examples of these applications include magnetic bearings (Zad et al., 2017) and industrial robots (Baek et al., 2016). To achieve the improved trajectory tracking of target, paper (Begon et al., 1995) created a fuzzy-SMC for a rapid parallel robot. Relevant studies on distributed coordination in multi-robot systems (Liu et al., 2024a) also provide theoretical support for multi-DOF collaboration in parallel manipulators. In particular, Liu et al. (2024a) proposed a distributed coordination framework that integrates both competitive and collaborative behaviors inspired by natural swarm intelligence. By introducing a k-winner-take-all mechanism and combining a recurrent neural dynamics solver with a consensus-based distributed algorithm, their approach ensures effective resource utilization and system stability in multi-robot settings.
Real-world systems are sensitive to numerous sources of uncertainty and disturbance, for example, measurement noise, parameter variations, unmodeled dynamics, and outdoor disruption. To validate the practicality of managing the PR system, we should assess the impact of these uncertainties and disturbances, and consider worst-case scenarios. To reject model improbability and exterior interruption, the upper bound on external disturbance and model uncertainties is often derived from mathematical models of the system. To justify its feasibility, we need to certify that the model precisely signifies the real-world system. If our used model is too simplistic or fails to capture important dynamics, the derived upper bound may not be realistic. In practical system, it is presumed that these upper bounds are uncertain and need to be estimated using the various adaptive control mechanism (Zhang et al., 2022). Numerous robust controllers, including backstepping control (Azad et al., 2022), fault-tolerant control (Alizadeh et al., 2022), learning control (Dolatyabi et al., 2025; Jin et al., 2023; Mukherjee et al., 2022), synchronization control (Alinezhad and Esfanjani, 2022), fractional-order-based Linear Quadratic Integral Regulator (LQIR) (Saleem et al., 2023), and fuzzy control (Naghibi et al., 2017), have been developed in recent years to accomplish the required control performance. Barrier function is one of the main powerful types of the adaptive control technique that can offset the ambiguities and disorders happened in the PR system. The main advantageous of the barrier function technique includes the fast reachability and the strength against change of disturbances (Chen et al., 2019; Li et al., 2020; Long et al., 2020; Obeid et al., 2018). This mode may adaptively reduce the gain of controller as the disruption reduces, and it similarly ensures that the sliding surface will reach a proximity of the origin in a limited amount of time (Plestan et al., 2010; Shtessel et al., 2017). Additionally, the control chattering persists as a result of the reaching control law’s employment of signum function (Afifa et al., 2023). For LM positioner control, fast nonsingular terminal sliding mode (FNTSM) is established in (Zheng et al., 2014). The control signal of FNTSM controller lacks a switching device that can effectively muffle control chattering. That said, in a manner similar to that of APSSM, the size of its converging region is dependent of the upper bound of unknown disturbances. The barrier function (BF) is a continuous function created in a small neighborhood near the origin, with its value increasing infinitely as the variable gets closer to the boundary of the region. This feature can be included to enable control over output or constraint states. As an instance, a barrier Lyapunov function is created in (Jin, 2018; Tee et al., 2009;) for an adaptive backstepping approach where the output error magnitude is independent of the unknown disturbance and the states may be asymptotically tracked without breaking the constraints. BF is now used in an SMC scheme, which is foundation for achieving the finite-time convergence (Barghandan et al., 2023). Another control challenge that has not been investigated in the above papers is the existence of saturation or constraint on the control inputs. However, for the PR system that needs high amplitude control inputs, the saturation functions can diminish the system’s performance cause instability. Thus, it is crucial to design the saturation function C2 using the auxiliary system to estimate the actual saturation function to suppress the input saturation impression (Yang et al., 2020). Reference (Awan et al., 2019) proposes a fault-tolerant control scheme for a 6-DOF robotic manipulator designed to maintain reliable performance under sensor and actuator faults. It integrates nonlinear observers to estimate system states and identify faults, which are then addressed using hardware redundancy and control reconfiguration. The actuator fault compensation leverages an adaptive backstepping technique to ensure continued operation despite failures. Simulation results conducted in LabVIEW demonstrate improved trajectory tracking even in the presence of multiple fault conditions, highlighting the effectiveness of the hybrid control approach.
Contribution
After considering the earlier conversation, it can be deduced that there has been little focus on efficiently controlling the PR system in the existence of external disturbances and input saturation by employing the barrier function-based adaptive terminal sliding mode control (BFATSMC). Next, the dynamic PR system model is created under external disturbance and input saturation conditions, with the implementation of the BFATSMC methodology ensuring fast trajectory tracking control of PR system. Therefore, the key benefits of the suggested approach include: (1) the prescribed control strategy does not need any prior information of disturbances. (2) The control command varies according to the level of disturbance, thus, when the disturbance is decreased, the control effort decreases as well. (3) The tracking error converges within a predetermined area near zero within a limited time frame using Lyapunov criteria. Therefore, the primary fundamental novelty of this paper can be outlined in the subsequent manner. (1) Enhancing the precision of the PR system in relation to the saturation over the input by utilizing a nonlinear function compensator; (2) Proposal for controlling the PR systems in finite time by means of a nonsingular terminal sliding surface; (3) Using the adaptive barrier function, which is lowly sensitive to disturbance reduction, for the rejection of external disturbance; (4) Ensuring that the tracking error can be brought to a predetermined set by applying Lyapunov’s stability theory and the BFATSMC technique.
Organization
The paper is organized in the succeeding way. In the next section, dynamical model of the PR system is descripted. The main results including presentation of the compensator for input saturation, design of the BFATSMC technique is provided later. Then, the simulation and experimental results are existed. Finally, the conclusions are reported.
PR dynamic model
This section of the paper presents the general formulation of the dynamics of the PR, which can be applied to any type and degree of freedom (DOF) of parallel robots. The three stages for representing the dynamics of parallel robots are mentioned in references (Briot and Khalil, 2015a; Cheng et al., 2003), and can be stated in a typical joint-space format as found in (Ghorbel et al., 1994; Spong et al., 2020):



By considering input saturation and input diagonalization, the dynamic model of equation (2) is denoted in second-order form as



Remark 1: The outputs that can be measured are the states

Main results
In this section, the BFATSMC design for the parallel manipulator’s tracking control is provided. To start with, a compensator is created to improve the response to input saturation. When disturbances alter, the resulting controller can follow the command signal rapidly and precisely without overestimating the gain of adaptive control. Furthermore, the tracking error could narrow down to a predetermined range nearing zero within a short timeframe. Next, the system’s stability is examined and various control parameter choices are discussed as well.
Lemma 1 (Xiu and Guo, 2018): Assume that

Estimation of the input saturation
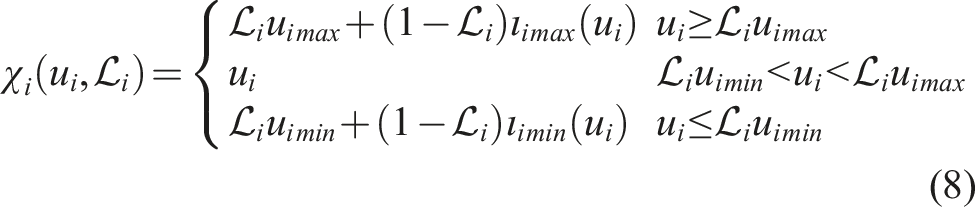
In this section, to overcome the impression of the saturation on control input that progress the productivity of the recommended technique, a function is designed to approximate the real control input
Construction controller
In order to design the BFATSMC law, a nonsingular function


Moreover, the auxiliary variable

Next, time-derivative of switching surface (9) is gained as
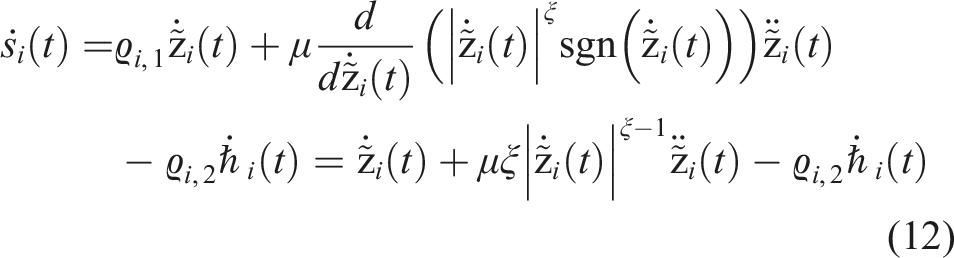
Substitution from (3), one can gain
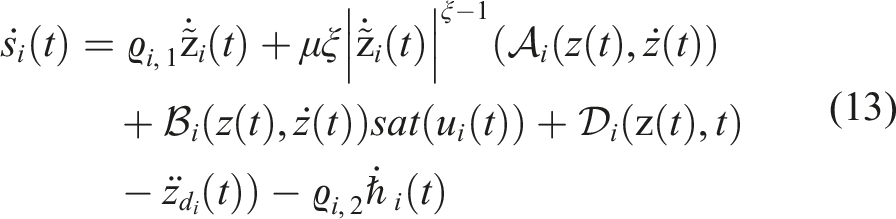
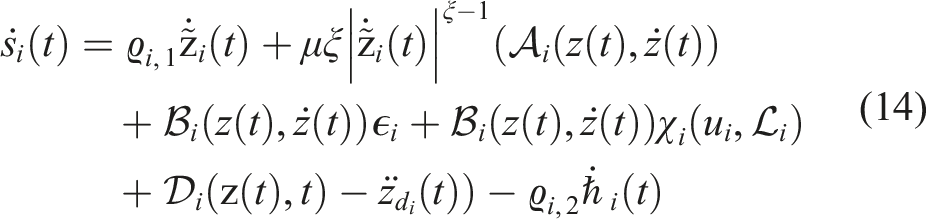
Doing some simplifications, it can gain
Considering auxiliary variable design (11) and removal of the same expression, we have



Moreover, the reaching control law is formed as

A positive constant



Remark 2: In order to increase convergence speed, the exponential expression
Remark 3: In Figure 1, the variation of the barrier function (or Variation of the barrier function 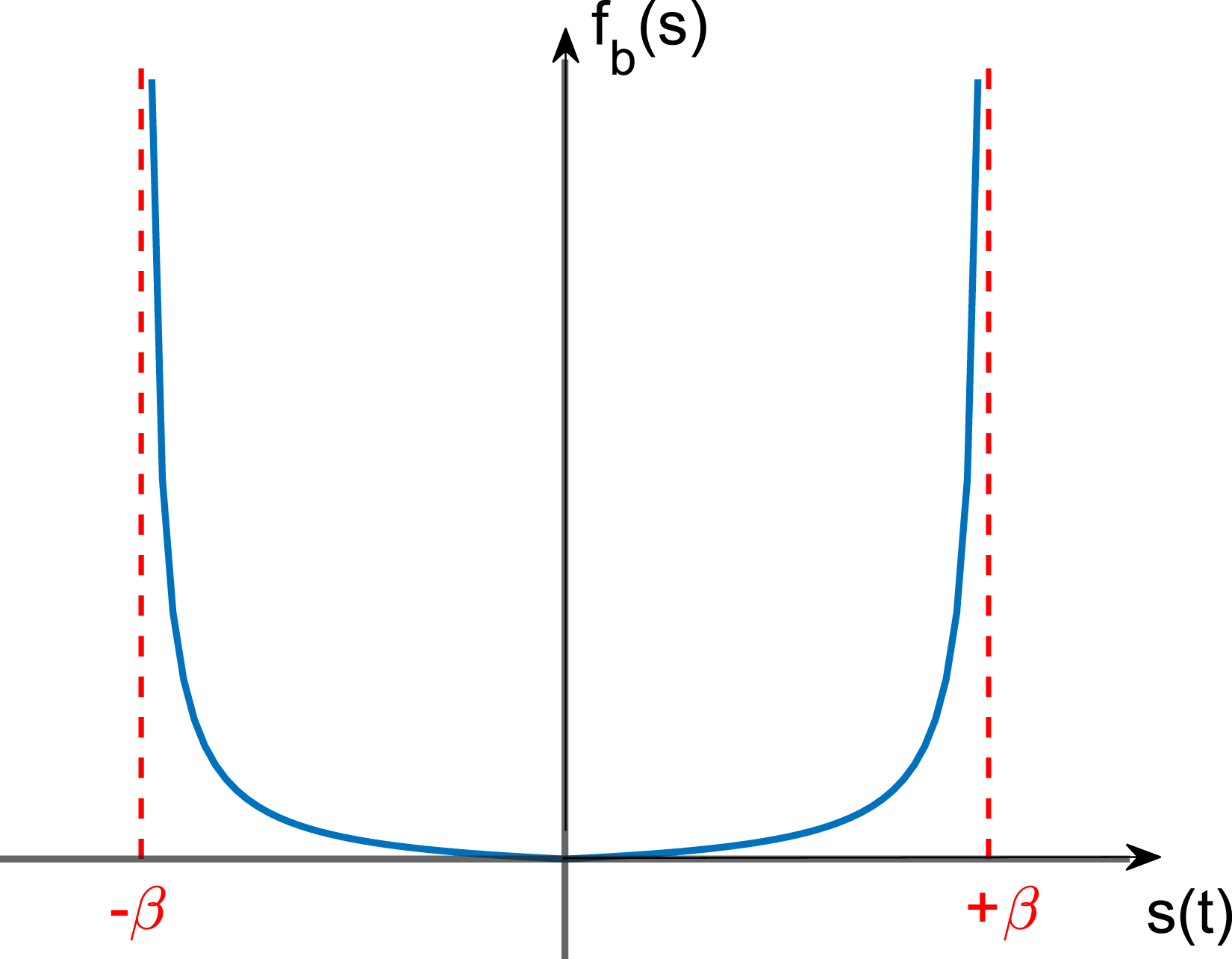
Stability analysis
The next part explores the stability analysis of the suggested BFATSMC law via the Lyapunov criteria.
Lemma 2: The PR dynamic system in equation (3) under the BFATSMC law (22) is assumed for
Proof of Lemma 2: For the

Case 1: If
Case 2: If


Theorem 1: Assume the PR system in (3) with uncertainty in its parameters. Then, for any random initial tracking error defined in equation (6), the sliding surface


Proof: In the first step, by considering the equivalent control input, we have

Phase 1) Using adaptive control in equation (20) for



According to Lemma 2, there is a positive constant
It is clear that from (4), one can obtain
Then, by some algebraic handwork on (32), one can obtain:



Since

Then, from (34), we have

Then, according to Lemma 1, the expression (37) guarantees the fast stabilization of the closed-loop system as studied in (Moulay and Perruquetti, 2006), which indicates that there is a fast reachability time
Moreover,
Phase 2) Using adaptive control equation (22) for
The advantage of employing barrier function-based adaptive control equation (22) is to generate control gain

It is noteworthy that
In the prior phase, it is represented that
Consider the case of


The following symbols are defined similarly to the previous step:

According to the expressions of (21) and (39), one can obtain that


Since

Then, from (43), we have

Accordingly, based on Lemma 1, the expression (46) fulfills the finite-time stability condition for any
For
As a result, it is evidenced that by using the BFATSMC law (22), the sliding surface satisfies the condition
Remark 4: Since
Remark 5: The discontinuous functions of

Simulation and experiment
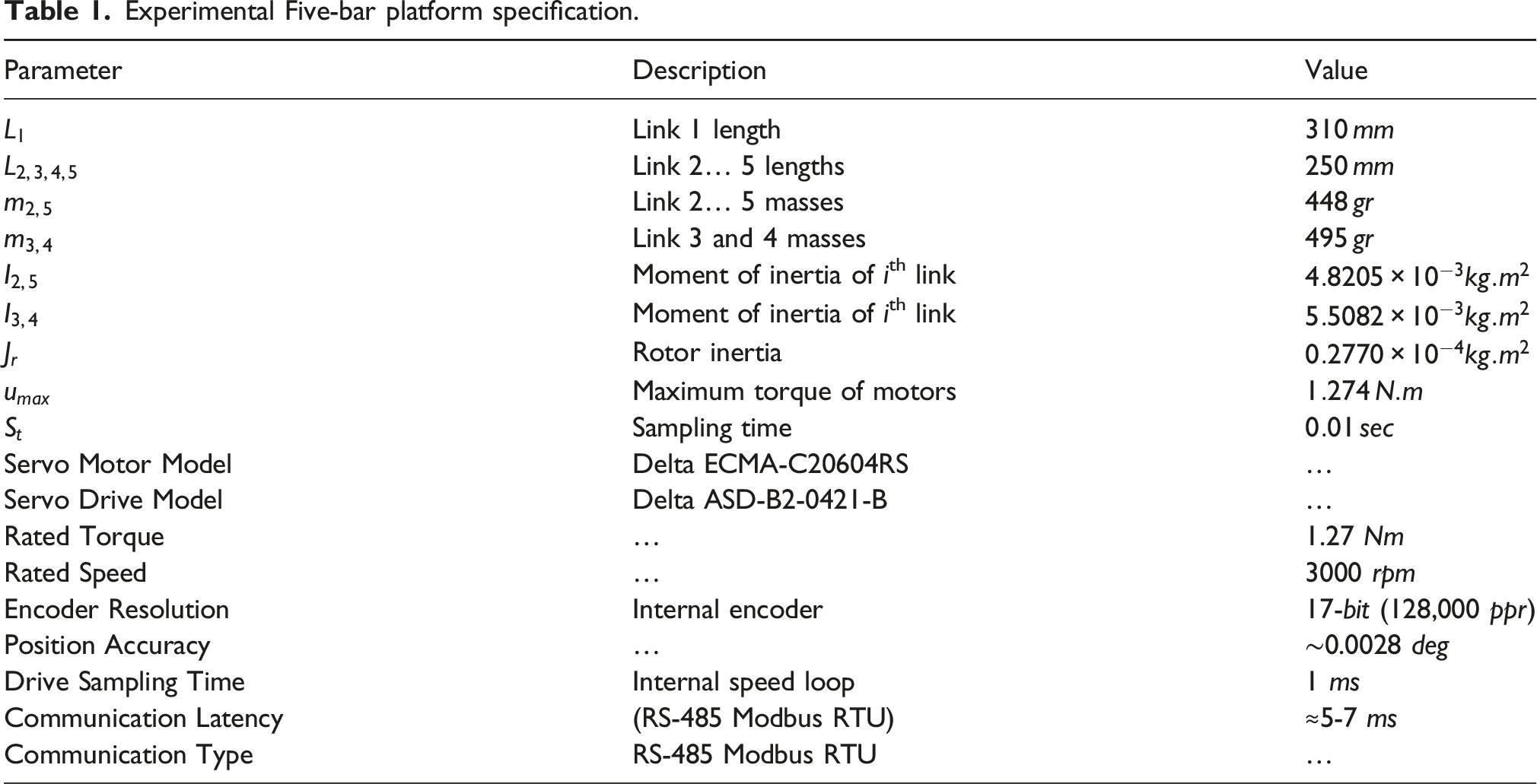
In the upcoming part, the comparative simulation outcomes between two nonlinear controller and proposed method are provided; then, for validation of the suggested control technique, the results of the simulation and experimental tests on the actual Five-bar robot prototype are showcased, which is designed in SolidWorks (Figure 2). The mentioned platform specification has been provided in Table 1. CAD of Five-bar robot modeled in SolidWorks 2021sp4; (left) illustrates active/passive joints, fixed base, end-effector and actuators; (right) illustrates links and joints, end-effector position and origin of the robot. Experimental Five-bar platform specification.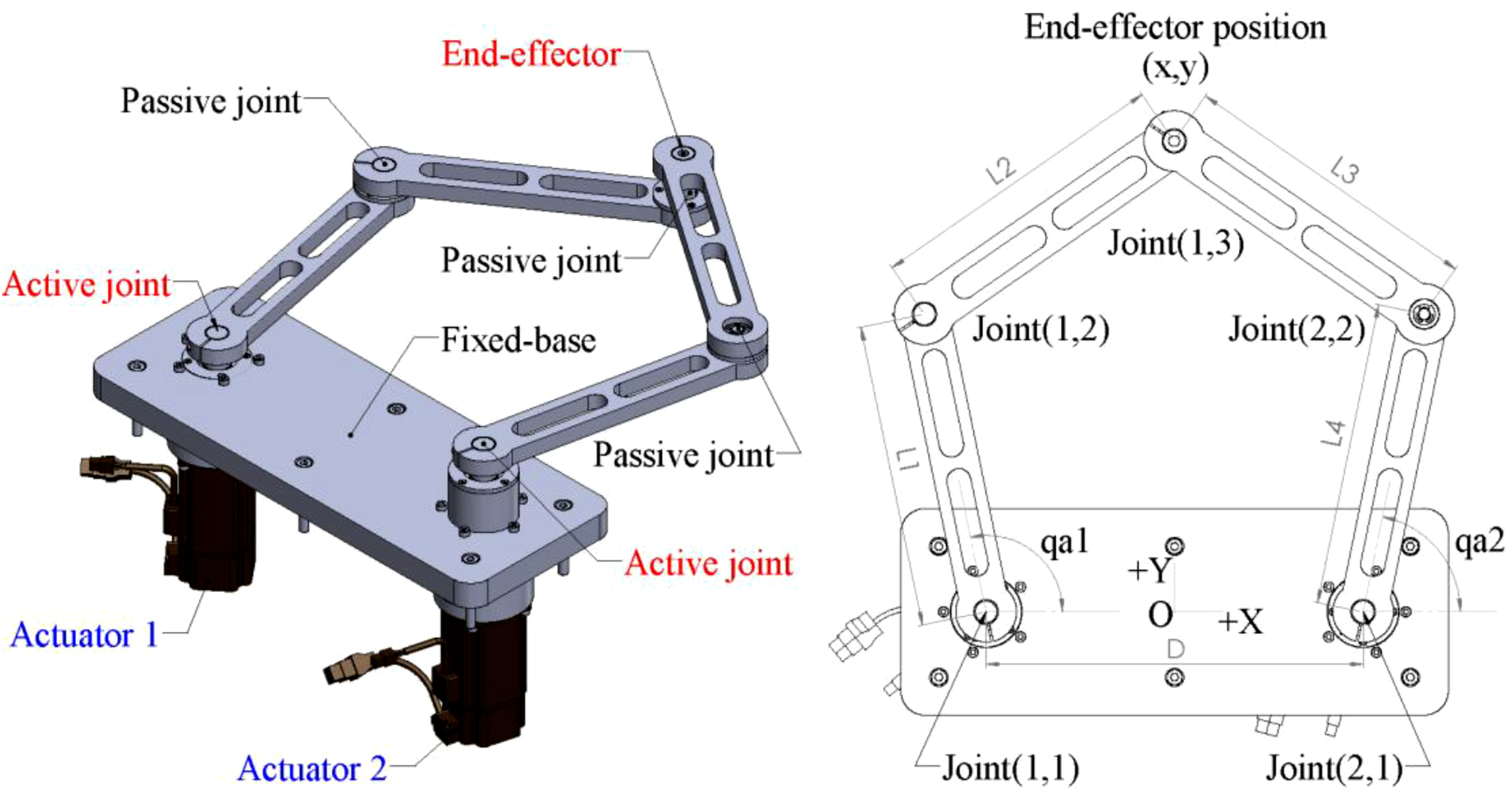
Assumptions
To guarantee both implementability and theoretical soundness, the suggested BFATSMC control technique is built under realistic and widely recognized assumptions. It is predicated on the reasonable knowledge of the parallel manipulator’s fundamental dynamics, which include important inertial and frictional characteristics. In accordance with conventional adaptive control procedures, modeling uncertainties and external disruptions are regarded as bounded but unknown. An auxiliary compensator is used to handle the assumed smooth actuator saturation. It is expected that joint locations and velocities may be measured or estimated using common sensors or observers. Furthermore, Lyapunov-based finite-time stability analysis is made possible by assuming that system functions are continuous and locally Lipschitz close to the operational point. These presumptions back up the controller’s theoretical assurances and represent actual circumstances in common robotic systems.
Limitations
Though there are still some practical issues, the suggested BFATSMC controller performs well in simulation and experimentation. Its application in highly uncertain systems or with unknown models is limited by its reliance on incomplete understanding of system dynamics. Velocity measurements may be susceptible to noise, particularly when numerical differentiation is used, and time delays in sensors or actuators are not specifically handled. Filtering or observer techniques can be used to improve this. For simpler implementation, parameter adjustment may alternatively call for methodical or optimization-based approaches. Future research could improve resilience against sudden failures and intricate unmodeled dynamics, even though the controller manages constrained disturbances adequately. These elements point to possible avenues for enhancing the controller’s usability and dependability in increasingly difficult real-world situations.
Hardware and software platform
A specially designed five-bar parallel robot was created in order to verify the suggested BFATSMC control mechanism. The prototype, which was made using 7000-series aluminum alloy and designed in SolidWorks, is robust and lightweight. Digital servo drives and microcontroller boards regulate two AC servo motors that power the active joints. Real-time joint position feedback is provided by high-resolution encoders, and control is managed by a desktop computer over a fast serial connection. The control loop uses Simulink Real-Time and MATLAB/Simulink to operate at intervals of 0.01 seconds. The control architecture and the manufactured prototype are depicted in Figure 3(a) and 3(b), respectively. Reliable real-time testing of the BFATSMC controller’s tracking accuracy, robustness, and disturbance rejection under dynamic, real-world settings is made possible by this integrated hardware-software arrangement. Illustration of real experimental setup: (a) Actuation and control system including the digital actuators, microcontroller boards, and the electrical control panel; (b) general view of the fabricated Five-bar parallel robot prototype.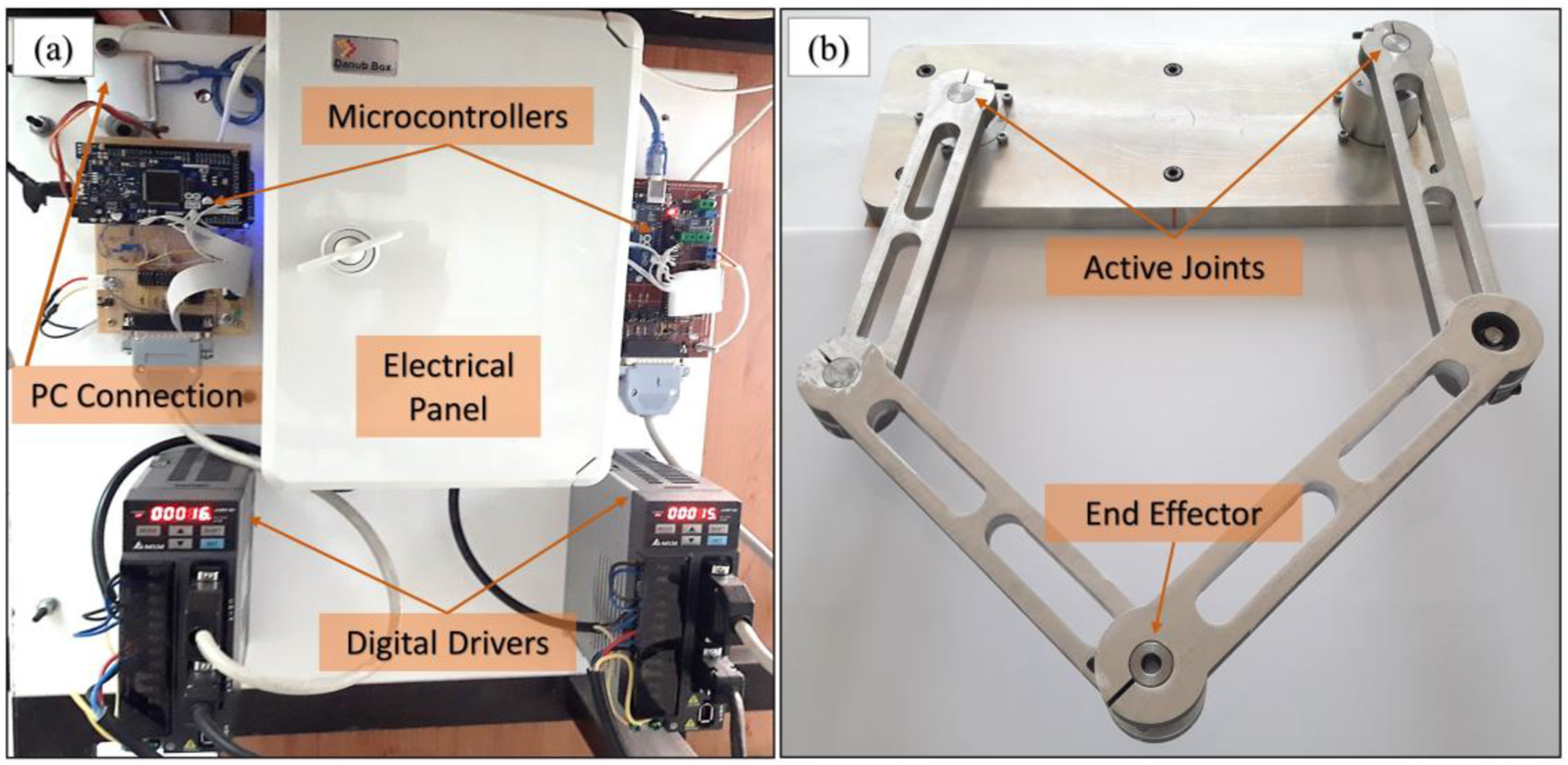
Simulation results
In the upcoming subpart, the comparative simulation outcomes between SOSMC (for more detail see (Jia et al., 2019)), NTSMC controller (for more detail see (Ye et al., 2021)) and the proposed method (22) on the designed Five-bar parallel robot has been presented; where the suggested controller parameters, acquired through trial-and-error, are:
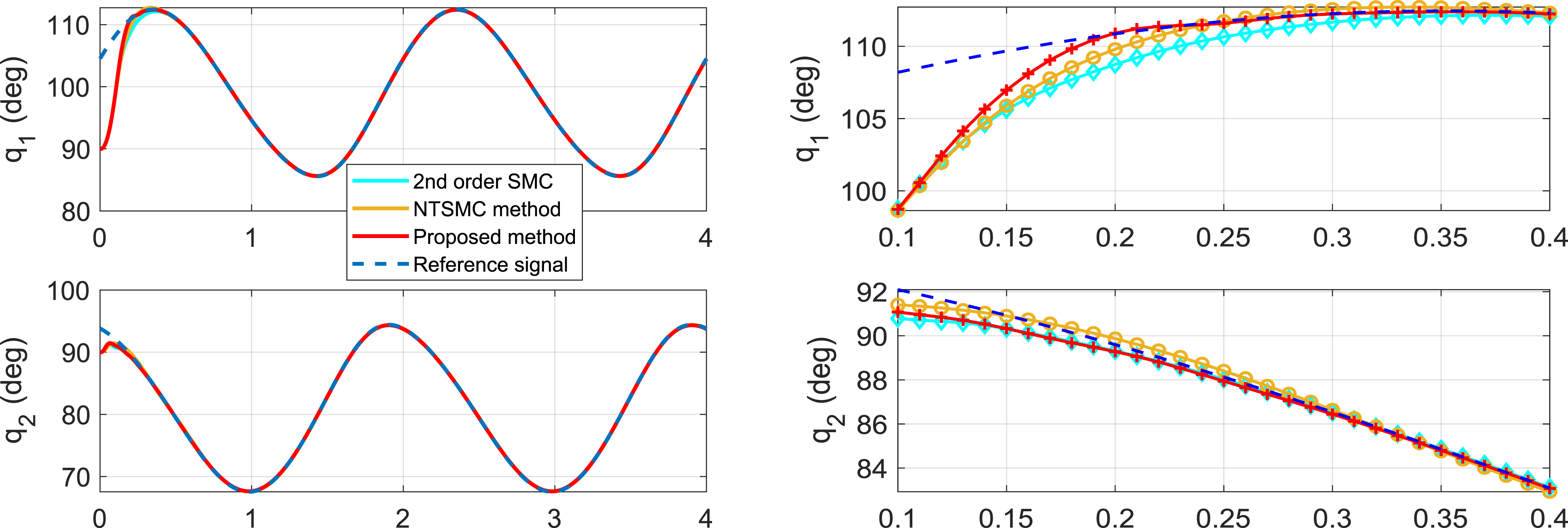
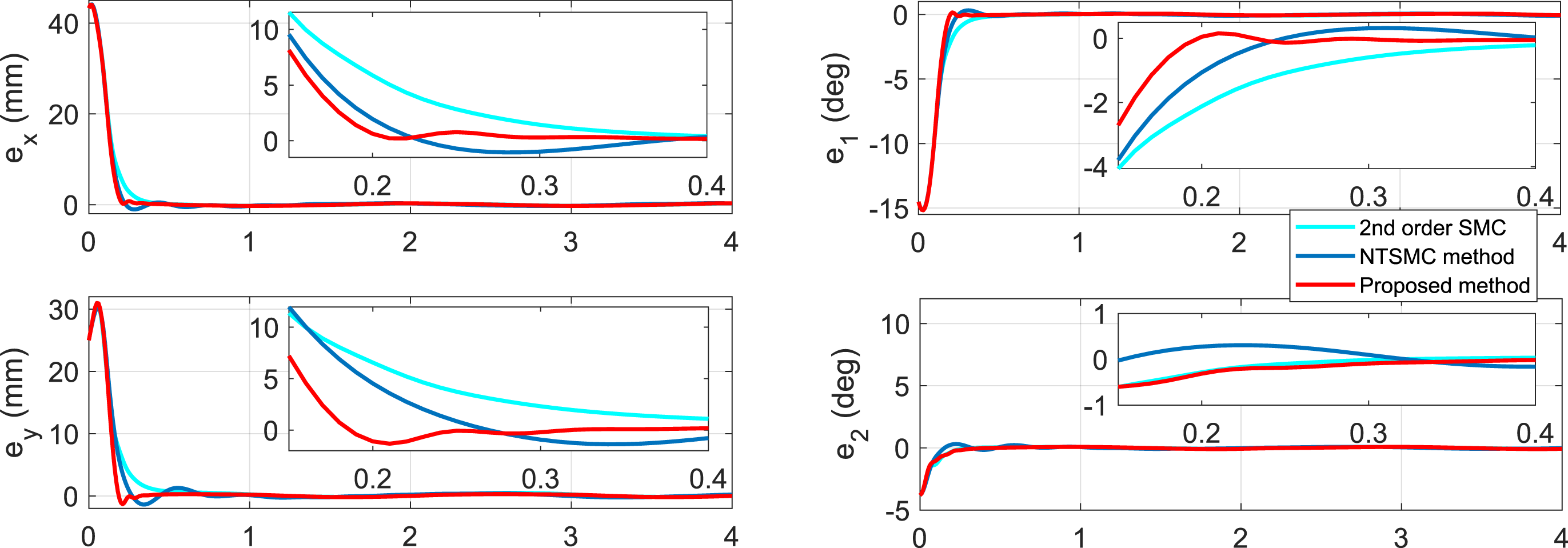
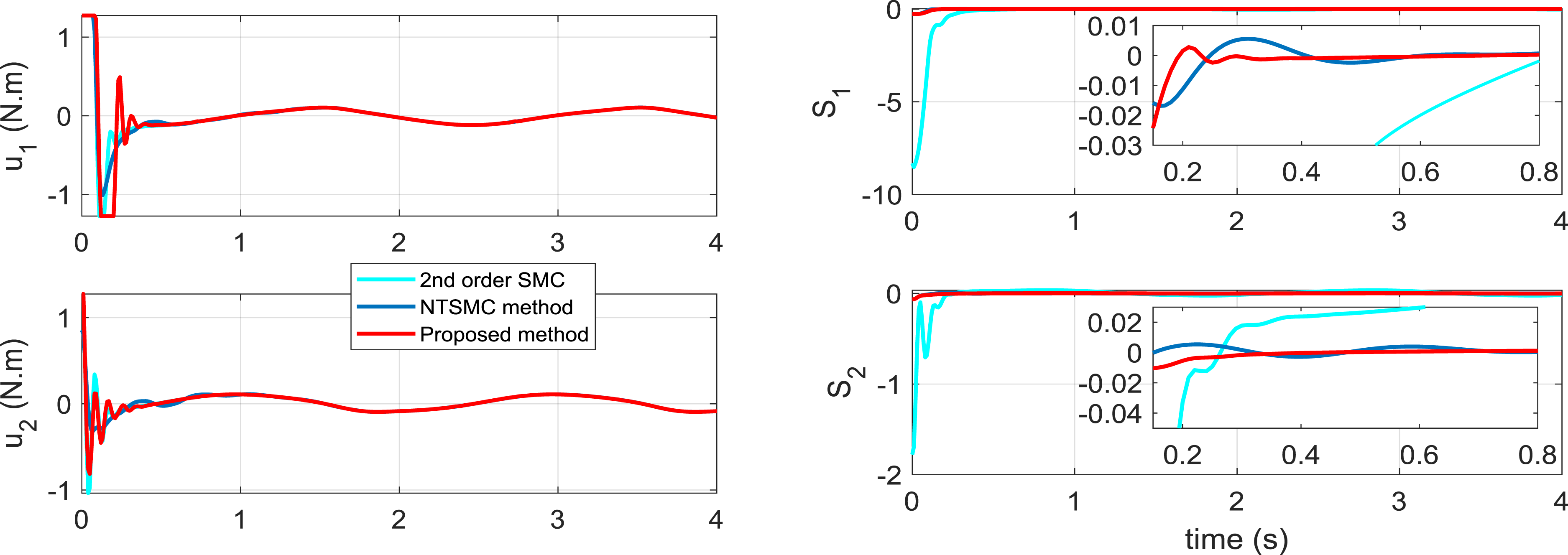
In Figure 4, the diagram displays the chronological progression of the end-effector’s position in job space, demonstrating that the end-effectors of robot swiftly converges the intended trajectory within 0.3 seconds and remains on track. Figure 5 exhibits the chronological record of angular positions of active joints and tracking the reference signals in joint space. Figure 6 shows tracking error signals of the end-effector and joint. Finally, Figure 7 illuminates the time history of actuators control inputs and time history of sliding surfaces (sliding variables). Trajectories of the location of the end-effector during the task space. Trajectories of the angular position of the active joints during the joint space. (Left) Trajectories of the tracking error related to the end-effector. (Right) Trajectories of the tracking error related to the active joints. (Left) Time history of control inputs. (Right) Time history of sliding surfaces.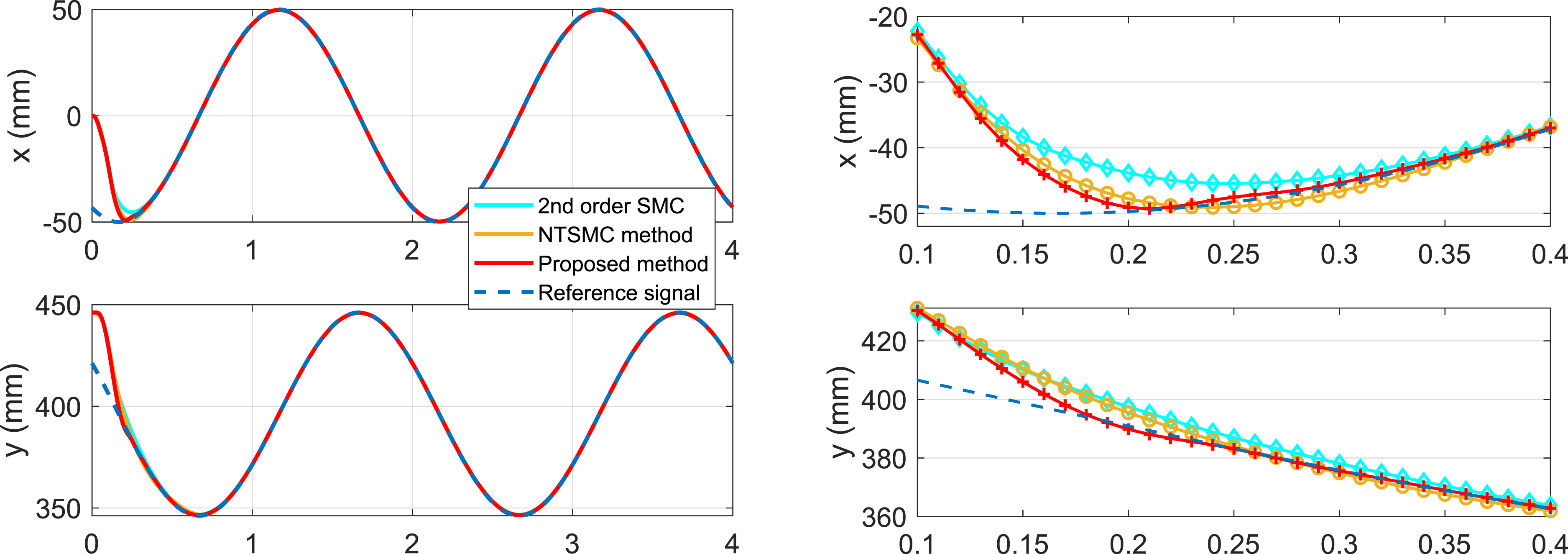
Performance indexes of control techniques.

Convergence time between different method.

Experimental results
In upcoming subpart, the experimental findings of the parallel robot are illustrated as depicted in Figure 8. The simulations were conducted using a Dell Inspiron 5110 laptop equipped with an Intel Core i7-2670QM processor (2.20 GHz), 8 GB of RAM, a 250 GB SSD, and a 500 GB HDD, running Windows 10 (64-bit). The robot is powered by two motors (located on active joint in Figure 3) that are linked to the microcontrollers via two digital drives. The drives, also known as actuators, use encoders to gather the positions of the joints and then transmit torque commands to the actuators. During the control process, the computer directs the controllers and receives outputs from them, while the End-effector (Figure 3) follows the specified trajectory. The benchmark properties are provided in Table 1. The proposed controller parameters have been selected as Experimental benchmark of the parallel robot.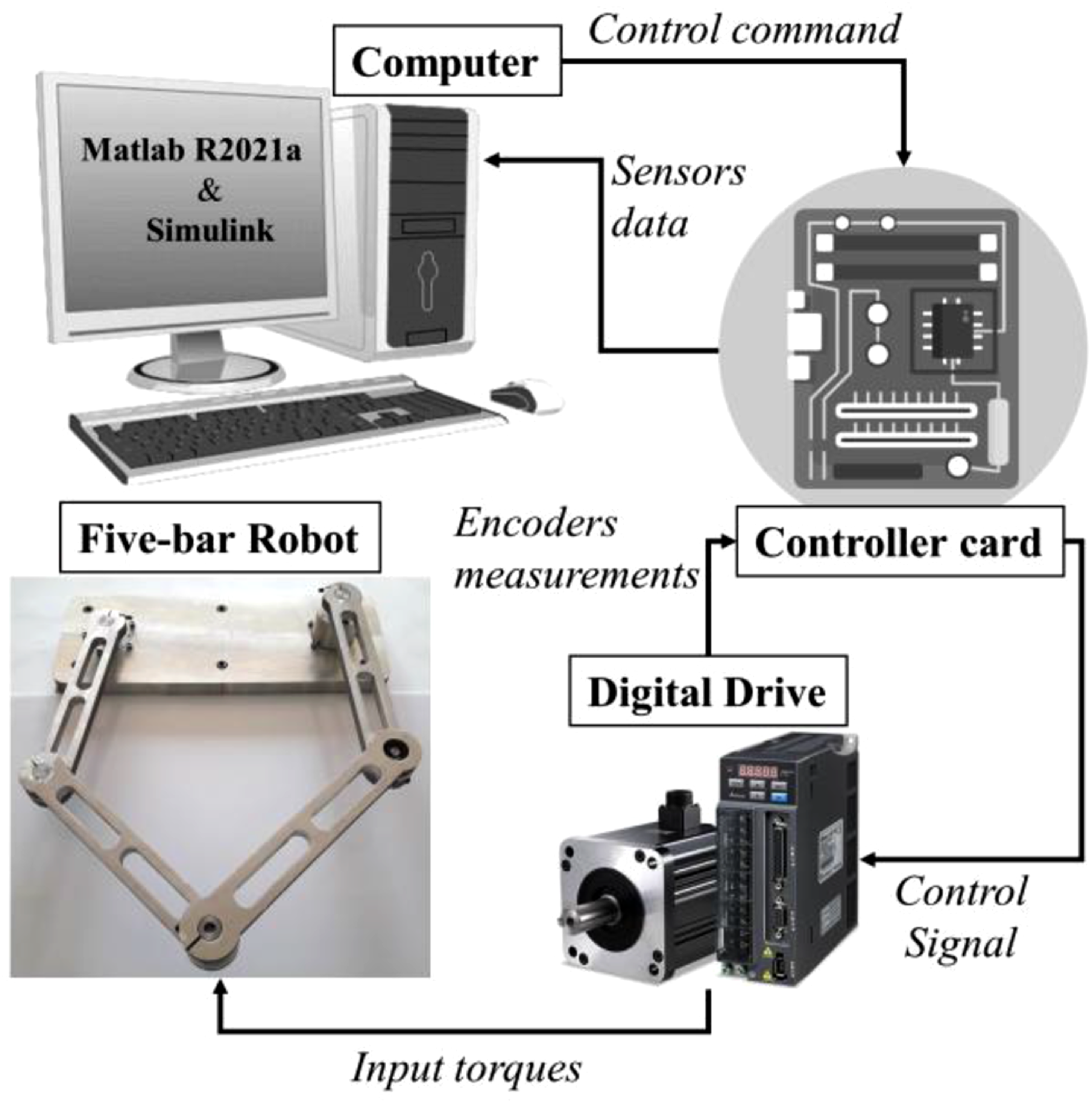
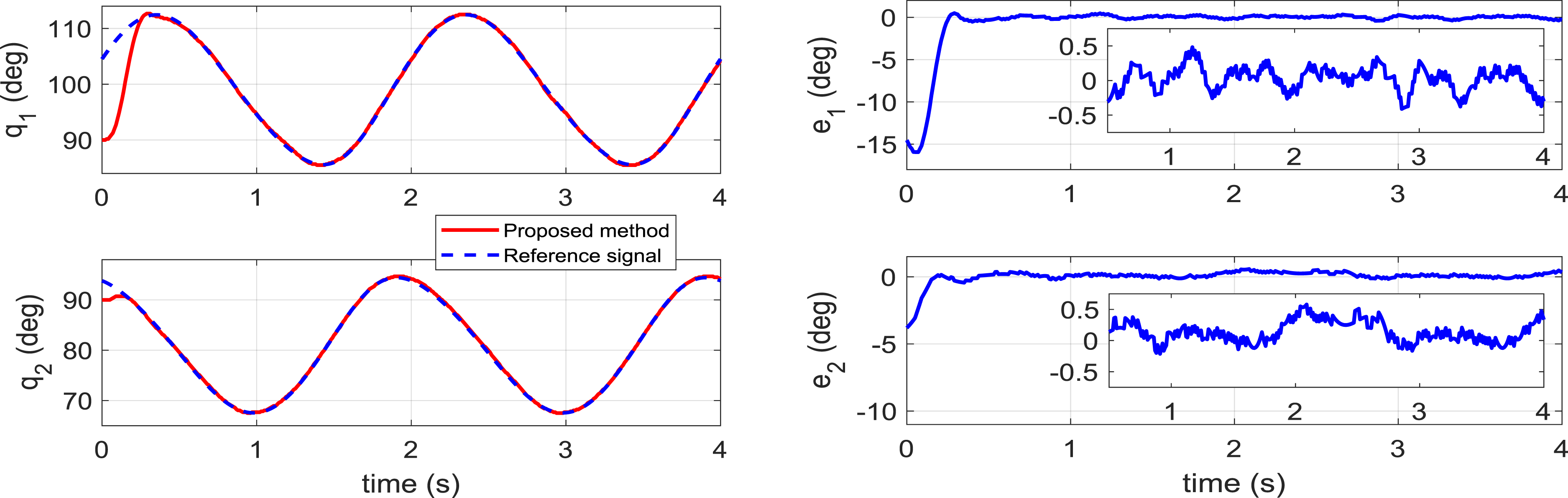
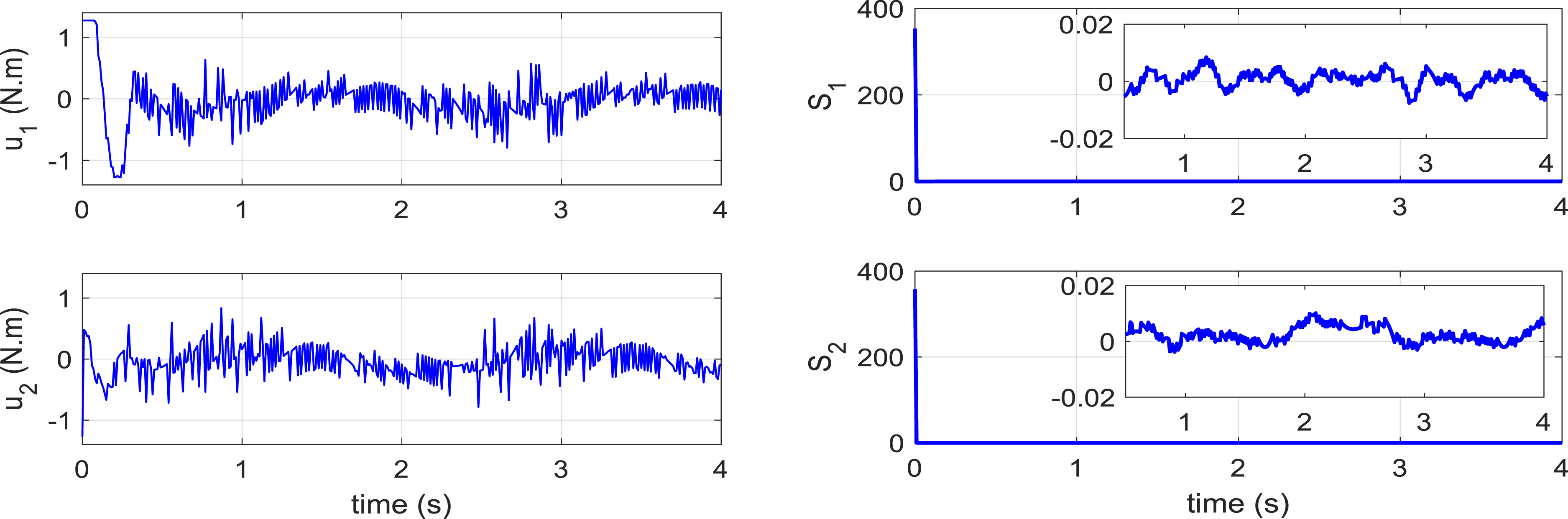
The simulation results presented in Figure 9 through Figure 11 offer a detailed evaluation of the proposed control method’s performance in tracking accuracy, stability, and control input behavior. Figure 9 illustrates the trajectory tracking performance of the end-effector. The results show that the end-effector successfully converges to the desired trajectory within approximately 0.28 seconds, demonstrating rapid response and fast settling time. After convergence, the tracking error remains consistently bounded within (Left) Trajectories of the location tracking of the end-effector (Right) Trajectories of the tracking error of the end-effector. (Left) Trajectories of the location tracking of the joint (Right) Trajectories of the tracking error of the joint. (Left) Time history of control inputs. (Right) Time history of sliding surfaces.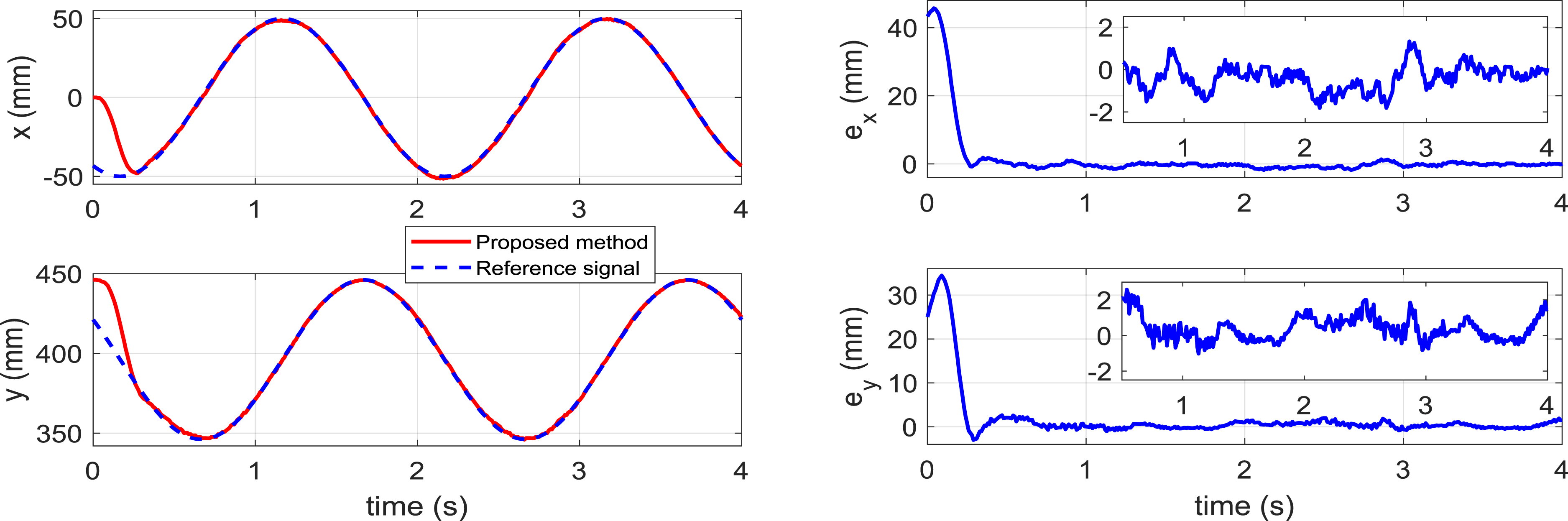
Conclusions
In upcoming article, a novel fast control approach to trajectory tracking of parallel manipulators was introduced, which was combination of the barrier function with TSMC. Stability analysis for the proposed method was done by Lyapunov criteria. Simulation outcomes obtained in the previous part showed that the designed controller has been able to achieve the desired goals well with respect to the SOSMC and NTSMC techniques, and its robust behavior against unknown disturbances and better performance in trajectory tracking is visible, then the experimental results approved the performance of designed controller which was applied on the benchmark of parallel robot including real prototype of Five-bar manipulator. For the future work, the combination of the event-triggered control method, for improvement of the controller performance, and the reinforcement learning, for estimation of the controller’s parameters, with the adaptive barrier function technique can be considered.
Future work
Although the proposed BFATSMC control method has shown promising performance in both simulations and experiments, several directions remain for future research. A primary focus will be on quantitatively analyzing the discrepancy observed between simulations and real-world tests through detailed error modeling and statistical metrics such as RMSE, MAE, and frequency-domain analysis. Special attention will be given to isolating effects from sensor noise, unmodeled friction, actuator delays, and time-varying uncertainties. Future work will also explore advanced compensation strategies—like observer-based disturbance estimation, enhanced friction models, adaptive parameter tuning, and machine learning-based refinements—to bridge the simulation-experiment gap and further enhance robustness. Additionally, integrating event-triggered schemes or reinforcement learning could improve efficiency and adaptability, especially in high-speed or resource-constrained settings. Beyond the current 2-DOF validation, future studies will investigate real-time feasibility and computational demands for higher-DOF systems. Finally, validation will extend to more complex trajectories (splines, segmented paths) to assess tracking accuracy and industrial applicability under diverse conditions.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
The data supporting the findings of this study are available from the corresponding author upon reasonable request.