
Abstract
The dynamic interaction between the human body and railway vehicles is pivotal for both operational performance and passenger experience. Existing models often neglect biodynamic coupling under multifactorial vibrations and oversimplify human biomechanics. Moreover, although carbody swaying originates fundamentally from mismatched wheel-rail contact conditions, its coupling effects with seated humans remain poorly understood. This study investigates the dynamic interaction mechanisms of the human-vehicle coupling system focusing on carbody swaying through theoretical analysis and numerical simulation. A seated human-vehicle coupling dynamics model is established and validated using existing research and measured data. The dynamic responses of the coupling system to track irregularities and carbody swaying are analyzed. The impact of carbody swaying on the vibration characteristics of both the vehicle and the human body is examined by varying running speeds and wheel profiles. The influence of the human body on vehicle vibrations and carbody swaying is explored. The findings reveal significant differences in vibration transmission between vehicle components and human body segments, along with noticeable variations in vibration perception among different seating positions. Carbody swaying markedly amplifies lateral vibrations, substantially deteriorating both vehicle stability and ride comfort. The structural properties of the human body demonstrate a dual effect: reducing the critical speed range for carbody swaying while amplifying instability amplitudes through dynamic mass-spring coupling. Human biodynamics suppresses vehicle vibrations at lower speeds but exhibits amplification effects at higher operational speeds.
Keywords
Introduction
Background and motivation
High-speed railways are a critical component of modern transportation systems, playing a significant role in urbanization and regional integration due to their high speed, efficiency, and environmental sustainability. With the continuous expansion of high-speed rail networks and the rise in passenger traffic, concerns about dynamic performance related to vehicle safety and ride comfort have grown.
The dynamic behavior of rail vehicles, including the phenomenon of carbody swaying, is fundamentally governed by wheel-rail contact relationships. The geometric interaction between wheel treads and rails serves as a critical factor determining the vehicle critical speed and its tendency to induce self-excited oscillations. Carbody swaying resulting from relatively low equivalent conicity transmits vibrations through the suspension system to the carbody, manifesting as high-amplitude, low-frequency lateral oscillations that directly jeopardize operational safety and ride comfort (Wickens, 1965). Consequently, comprehensive research on this phenomenon is essential for enhancing the overall performance of rail transit systems.
Current research on carbody swaying has extensively explored its effects on vehicle safety and ride comfort (Bustos et al., 2022; Liu et al., 2019; Zboinski and Golofit-Stawinska, 2024; Çati et al., 2024), yet most studies focus solely on vehicle vibrations (Kumar et al., 2016; Pradhan and Samantaray, 2018; Sun et al., 2020) or wheel-rail contact mechanisms, often neglecting the role of human vibration response and coupled human-vehicle dynamics. Moreover, analyses of human vibration responses are typically limited to a single vibration environment (Lin et al., 2020; Liu et al., 2017; Liu and Qiu, 2020; Maciejewski et al., 2022), without considering vehicle-related factors. Although some studies (Xiao et al., 2023; Xu et al., 2022, 2023; Zhang et al., 2025) have begun exploring the human-vehicle coupled system, they have not thoroughly investigated the comprehensive impact of carbody swaying on the dynamic characteristics of this system. Furthermore, when examining the influence of human factors on vehicle vibrations, current research often simplifies the human body model, disregarding its inherent stiffness and damping properties. In particular, there remains a lack of in-depth investigation into how carbody swaying, induced by low equivalent conicity resulting from mismatched wheel-rail relationships, affects occupant dynamics and feedback to the overall system. This study aims to address these gaps by providing a detailed analysis of the interactions within the human-vehicle coupled system under carbody swaying conditions. The findings are expected to contribute to improving overall rail transit performance and comfort.
Related work
Carbody swaying is a classic topic in academic research due to its significant impact on vehicle dynamic performance. Studies on carbody swaying reveal that it not only threatens bogie stability but also exacerbates carbody resonance and sway, compromising train safety and comfort (Yao et al., 2020). Deterioration in wheel-rail contact geometry (Sun et al., 2021) is the main factor to affect train stability. To improve stability, control methods such as wheel turning and rail grinding have been proposed. These methods aim to control wheel-rail contact conicity so as to avoid the frequency coupling between the hunting mode and the carbody modes (Chang et al., 2022; Sun et al., 2024), thereby reducing carbody flutter and sway. Research on carbody swaying has confirmed that track parameters such as rail cant, gauge, and wear depth significantly impact the stability of vehicle (Li et al., 2025). Additionally, degradation in the performance of yaw dampers, particularly blocking of damping valves, can intensify low-frequency carbody swaying, affecting ride comfort (Guo et al., 2024). Low-frequency carbody rolling phenomena have also been proven to be closely related to carbody swaying, potentially stemming from low equivalent conicity and reduced dynamic damping of yaw dampers (Li et al., 2023). Besides wheel-rail contact geometry and suspension parameters, factors like track irregularities (Lai et al., 2025; Yang et al., 2023) and aerodynamic loads (Ding et al., 2023; Wang et al., 2022) also contribute to carbody swaying. These studies have advanced the understanding of carbody swaying mechanisms and informed targeted control measures. However, prior research has predominantly focused on operational safety, with growing attention to ride comfort. Moreover, existing studies often rely on vehicle vibration as the primary evaluation criterion, largely overlooking human factors.
The development of bio-dynamic models not only advanced the understanding of vibration responses but also identified key vibration patterns. Initial studies focused on the nonlinear bio-dynamic responses of seated humans under vertical vibration (Kuang et al., 2023), later expanding to triaxial vibration environments (Sun et al., 2023). Subsequent experimental studies explored bio-dynamic responses under random roll vibrations, uncovering correlations between roll and lateral vibrations (Lin et al., 2020). Further analyses examined the influence of seat firmness on dynamic force distribution in seated humans under vertical vibration (Liu and Griffin, 2018; Liu and Qiu, 2020), as well as changes in human-seat coupling effects and their role in vibration transmission and ride comfort. A seated human model adaptable to diverse individuals and excitation conditions was developed (Wu et al., 2022), effectively identifying resonance-related vibration patterns. Using multi-body dynamics models, researchers thoroughly investigated the nonlinear responses of seated humans under vertical vibration (Liu and Qiu, 2020), particularly focusing on how stiffness and damping of body parts vary with vibration amplitude and their effects on resonance frequencies and ride comfort. These studies revealed complex interaction mechanisms between vibration responses and ride comfort. Additionally, patterns such as pelvic and thigh sliding, vertical body motion, spinal curvature, and force distribution at the human-seat interface were also revealed (Liu et al., 2017; Liu and Qiu, 2021). However, most current research on human vibration response remains confined to single vibration environments, largely ignoring the coupling effects between the human body and the vehicle system.
To comprehensively understand the dynamic response of the human body in vehicular vibration environments, it is essential to establish and further investigate a human-vehicle coupled system model. In developing this model, particular attention is given to factors that significantly influence ride comfort, such as seat support parameters, suspension parameters, and wheel-rail contact geometry (Xu et al., 2022). External excitations, including track irregularities (Xiao et al., 2023) and environmental winds (Zhang et al., 2025), also play a substantial role since their excitation frequencies are potential to couple with the modal frequencies of the carbody and the human body. Furthermore, carbody flexibility is another critical factor influencing ride comfort (Bokaeian et al., 2020; Kumar et al., 2016; Pradhan and Samantaray, 2018). Despite these advancements, existing human-vehicle coupled models often neglect the impact of vehicle stability, a key factor affecting comfort.
Most existing human-vehicle coupled models primarily consider the impact of the vehicle on humans, while neglecting the influence of humans on the vehicle. The human body, acting as a mass-spring-damper unit within the coupled system, participates in vibrations and can serve as a vibration absorber with self-damping characteristics. Therefore, it is necessary to consider the impact of the human body on vehicle vibrations. Kaneda et al. (2000) conducted experimental tests on a vehicle model with passengers and found that an increase in passenger count can reduce the amplitude of floor vibrations to some extent. Subashi et al. (2008) further investigated the influence of passenger seating posture on floor vibrations. Nagai et al. (2006) used experimental setups and computer simulations to study the coupled vibrations between the human body and flexible vehicle structures. Their findings indicate that resonant frequencies are related to passenger-seat dynamics and are influenced by the dynamic interaction between passengers and the vehicle body. Therefore, this study aims to address these research gaps by comprehensively exploring the interaction mechanisms of the human-vehicle coupled system in the context of carbody swaying.
Contribution of this work
The objective of this study is to investigate the mutual interaction mechanisms between a seated human body and the high-speed railway vehicle under conditions of carbody swaying. The main contributions of this study are summarized as follows: (1) A multi-body dynamics model of the human-vehicle coupling system considering carbody swaying has been developed. (2) The effects of carbody swaying on the vibration characteristics of the vehicle and the human body have been analyzed. (3) The effects of human body structure properties on vehicle stability and vibrations have been explored.
Modeling of seated human-vehicle coupling system
This section presents a coupled human-vehicle dynamics model developed through multi-body dynamics simulation. The integrated model combines a seated passenger model with a railway vehicle dynamics model, enabling comprehensive analysis of two key interactions: the impact of vehicle vibrations on passenger responses, and the influence of human body damping characteristics on vehicle dynamics, particularly carbody swaying.
Modeling of the railway vehicle and seated human
Based on multi-body dynamics theory, the high-speed vehicle model is established as illustrated in Figure 1. This model comprises the carbody, two bogies, four wheelsets, along with primary and secondary suspension systems. Both suspension systems are modeled using spring-damper elements. The equations of motion for the carbody, bogies, and wheelsets are expressed as follows Full-DoF dynamics model of a high-speed railway vehicle: (a) Side view; (b) Top view.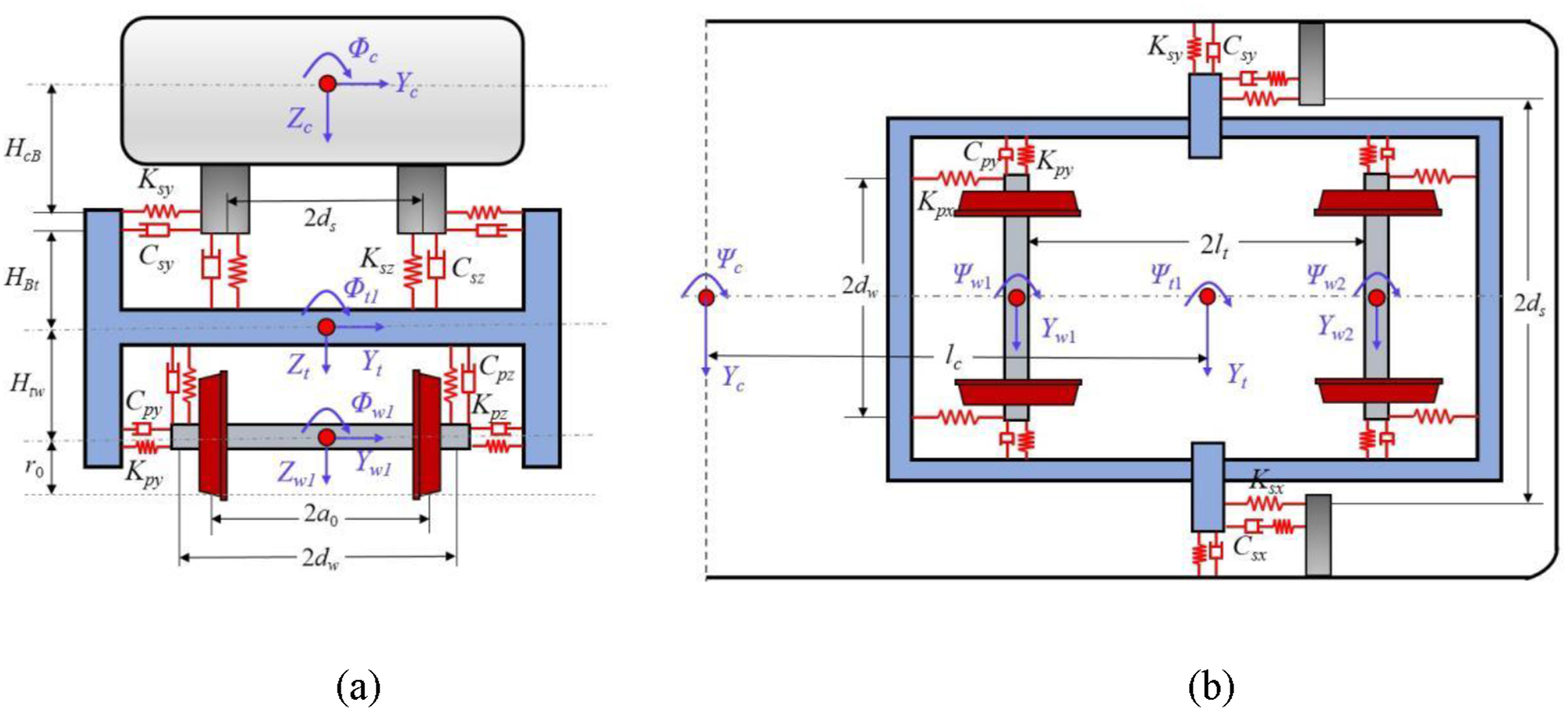



The subscripts c, t, and w denote the carbody, bogies, and wheelsets, respectively.
A 42-DoFs seated human model has been developed based on multi-body dynamics methodology to simulate passenger dynamic responses in high-speed railway operations. The model comprises seven anatomical segments: head, upper trunk, lower trunk, upper lumbar, lower lumbar, buttock, and thigh, each possessing 6-DoFs interconnected through stiffness-damping elements. The seat-human interface is modeled with lumped stiffness and damping parameters to represent the primary vibrational characteristics of the seat cushion. However, it is important to note that the connection between the seat structure and the carbody is simplified as rigid. This modeling approach prioritizes the investigation of the biodynamic interaction between the human body and the vehicle over the detailed effects of the seat frame’s flexibility. The seat back motion is neglected in this formulation, with the seat articulated to the vehicle body and the seat back connected to the seat cushion. The stiffness and damping parameters of the human body model were referenced from established biomechanical studies in the literature (Liu and Griffin, 2018; Liu and Qiu, 2020, 2021; Sun et al., 2023; Wu et al., 2022). Figure 2 illustrates the complete seated human model, while detailed mathematical formulations of the remaining components and associated forces are provided in Appendix I. 42-DoFs dynamics model of the seated human.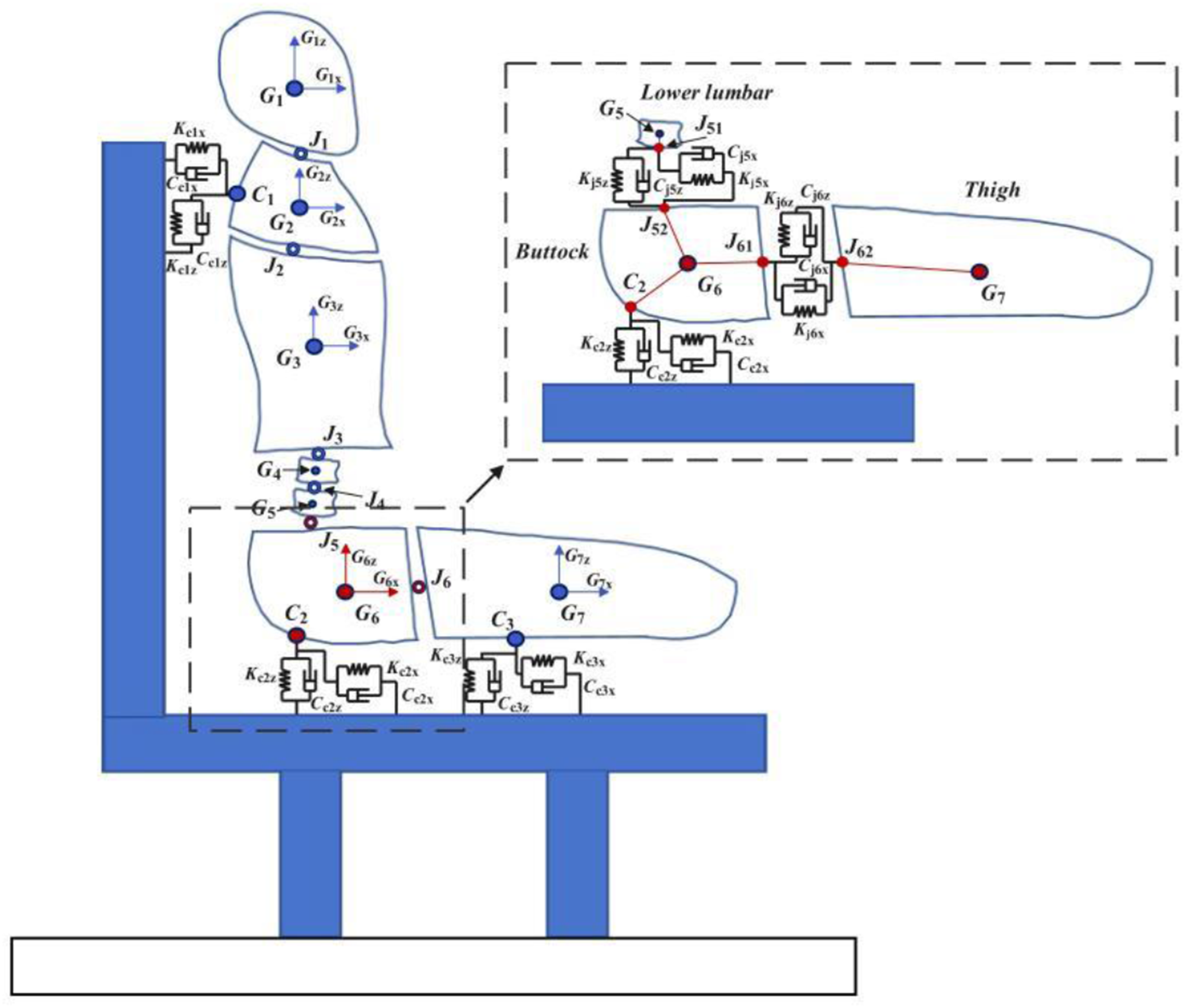
Taking the human thigh dynamic model as an example





The P7x, P7y and P7z represent the absolute coordinates of the center point of the thigh (G7) in the x, y and z axes, P6x, P6y and P6z represent the absolute coordinates of the center point of the buttock (G6) in the x, y and z axes, Pj6x, Pj6y and Pj6z represent the absolute coordinates of the connection point (J6) between the thigh and the buttock in the x, y and z axes, Pc3x, Pc3y and Pc3z presents the absolute coordinates of the contact point (C3) between the thigh and the seat cushion in the x, y, and z axes.
The displacement of the thigh (G7) in the absolute coordinate system

Therefore, the relative displacement vector between the thigh and the buttock


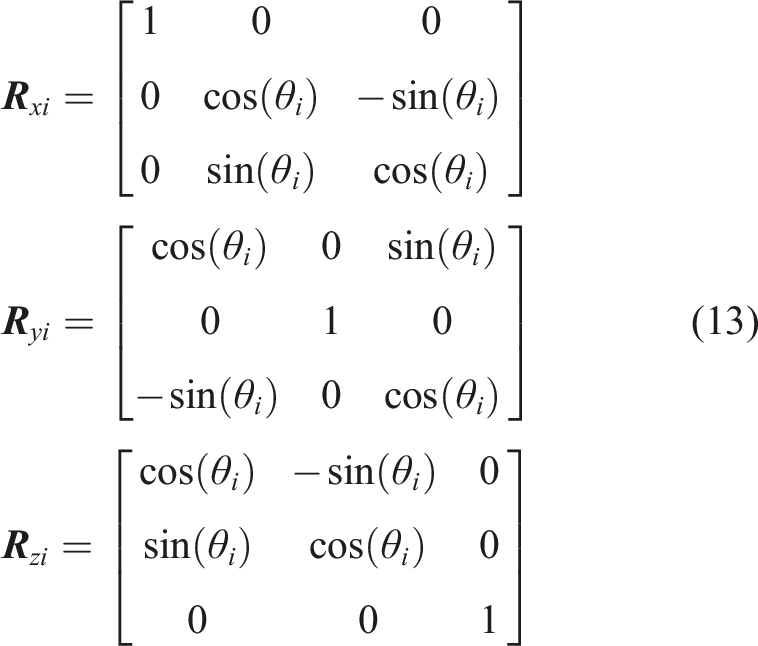
The Euler transformation matrix

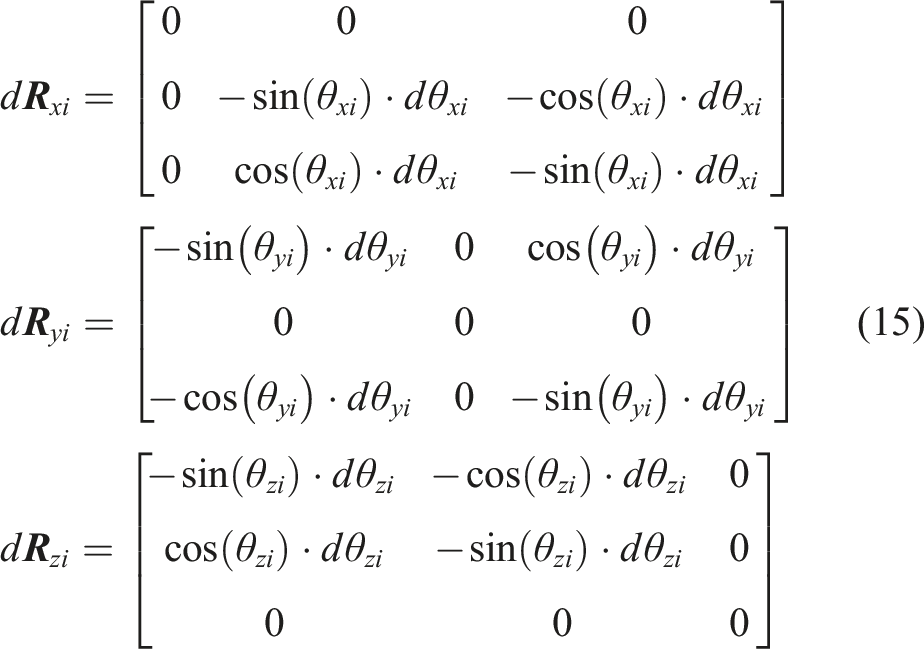
The derivatives of the Euler angles with respect to time can be written as

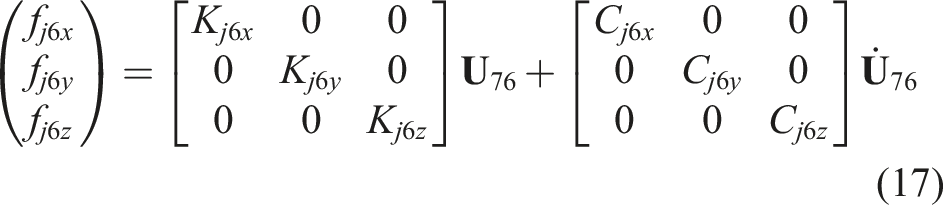
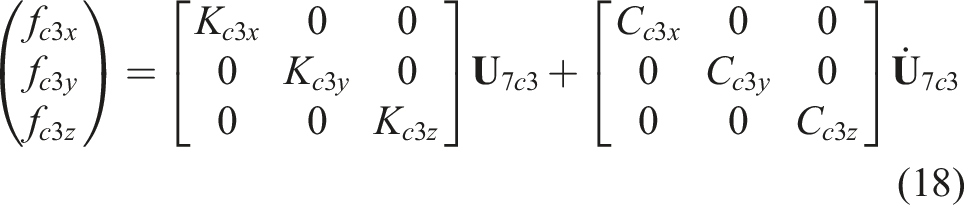
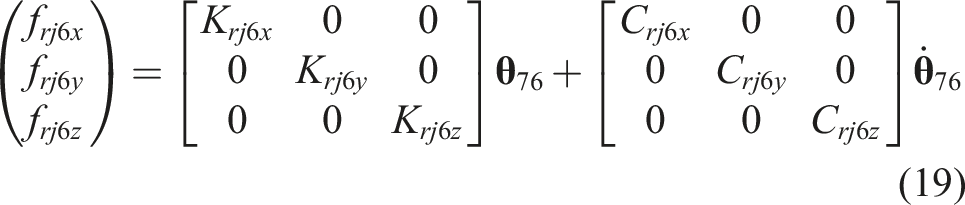
The dynamic equations of the human thigh can be expressed as
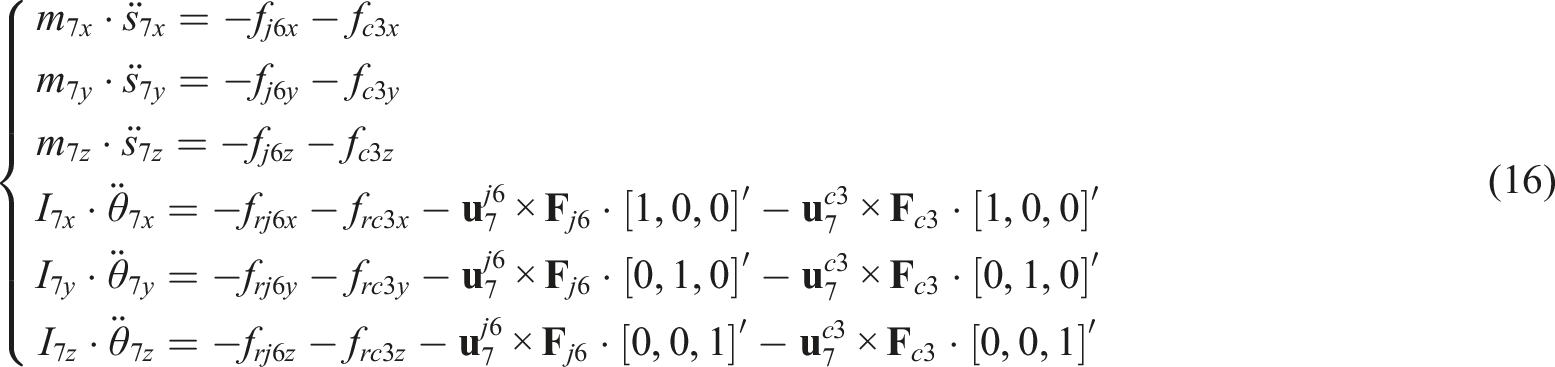
The aforementioned forces can be expressed as
Modeling of the coupling system
The multi-body dynamics software is adopted for the simulation work. Leveraging collected vehicle information, critical components such as the bodies, the joints, the constraints, and the force elements are systematically established and parameterized within the model. The wheel-rail contact forces are determined via the integration of the Hertzian contact and the numerical method FASTSIM, while the dynamic behavior of hydraulic dampers is simulated using the Maxwell model. To derive dynamic responses of the vehicle components, the SODASRT2 solver is applied to numerically integrate the vehicle nonlinear differential equations. Simulation parameters, including input and output conditions, time step, and duration, are configured based on actual operational requirements.
The coupled seated human-vehicle dynamics model is developed by integrating the established 42-DoF seated human model with the multi-body vehicle simulation model, as shown in Figure 3. The vehicle model incorporates six human occupant models strategically distributed across the front, middle, and rear sections of the carriage, featuring two seats per side across 11 uniformly distributed rows while considering left-right symmetry differences. This spatial configuration ensures accurate representation of passenger distribution patterns while capturing location-dependent dynamic responses. The design rationale addresses structural heterogeneity along the vehicle’s longitudinal axis, where variations in wheel-rail interactions and mechanical characteristics induce section-specific vibration profiles. Furthermore, lateral analysis enables precise simulation of differential vibration effects experienced by passengers on opposing sides of the vehicle. Seated human-railway vehicle coupling model in multi-body dynamics software.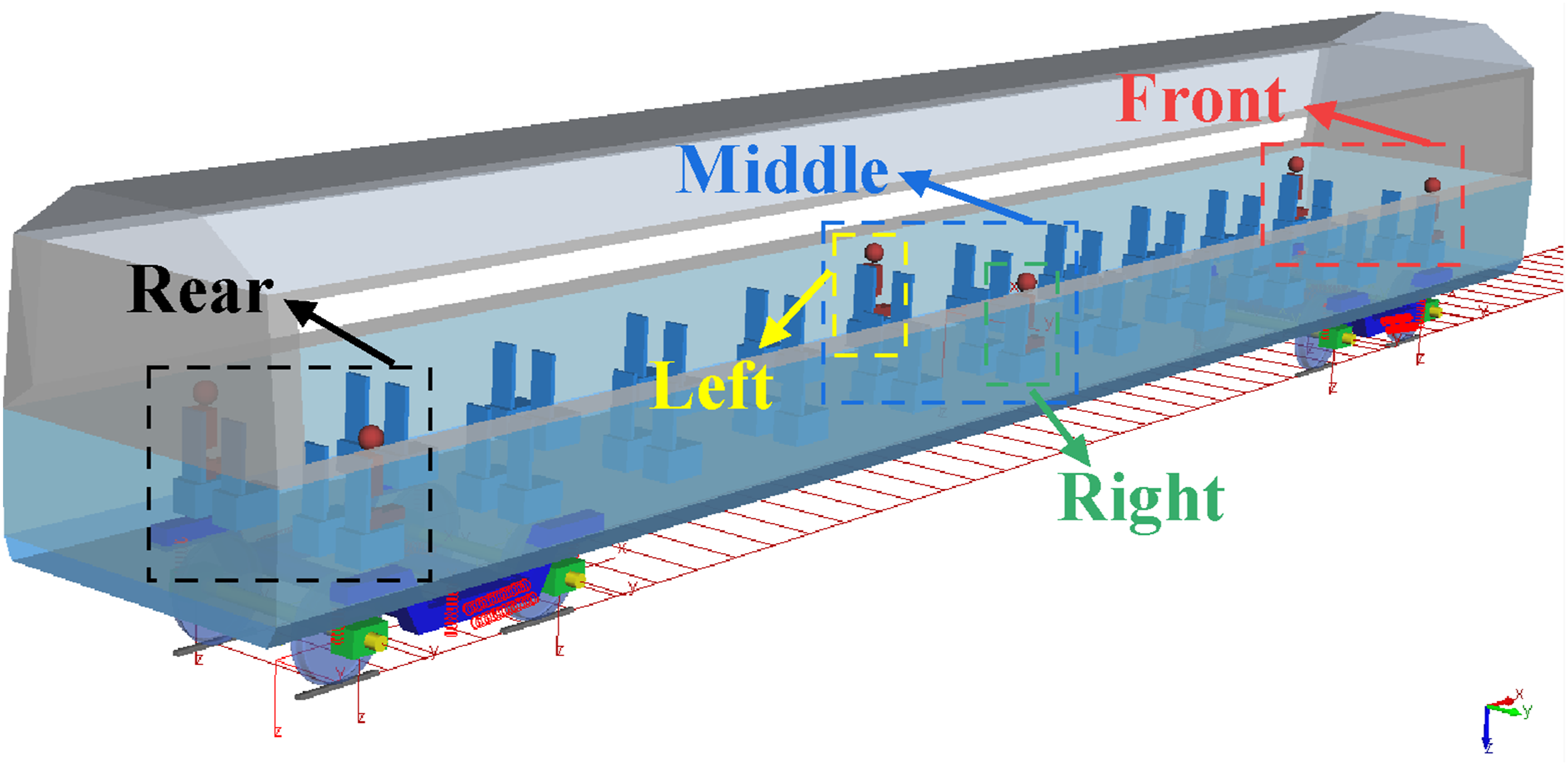
The wheel-rail contact condition is a critical determinant of vehicle dynamics performance and constitutes a fundamental component in vehicle system modeling. The seated human-railway vehicle coupling model incorporates a nonlinear wheel-rail contact geometry framework. Figure 4(a) presents the standard CHN60 rail profile alongside an abnormal profile resulting from excessive shoulder grinding, both paired with the S1002CN standard wheel profile to simulate normal and excessive low equivalent conicity conditions, respectively. To characterize the evolution of wheel-rail contact relationships under natural wheel profile wear, wheel profiles measured at varying operational mileages were analyzed against the CHN60 standard rail profile. Figure 4(b) illustrates these measured profiles (solid lines) and corresponding tread wear depths (dashed lines), while presents the associated equivalent conicity values. Wheel-rail contact relationships applied in this model: (a) standard and abnormal rail profiles and the corresponding equivalent conicity curves matched with the standard S1002CN wheel profile; (b) the worn wheel profiles and the wear depth under different operation mileages and the corresponding equivalent conicity curves matched with the standard CHN60 rail profile.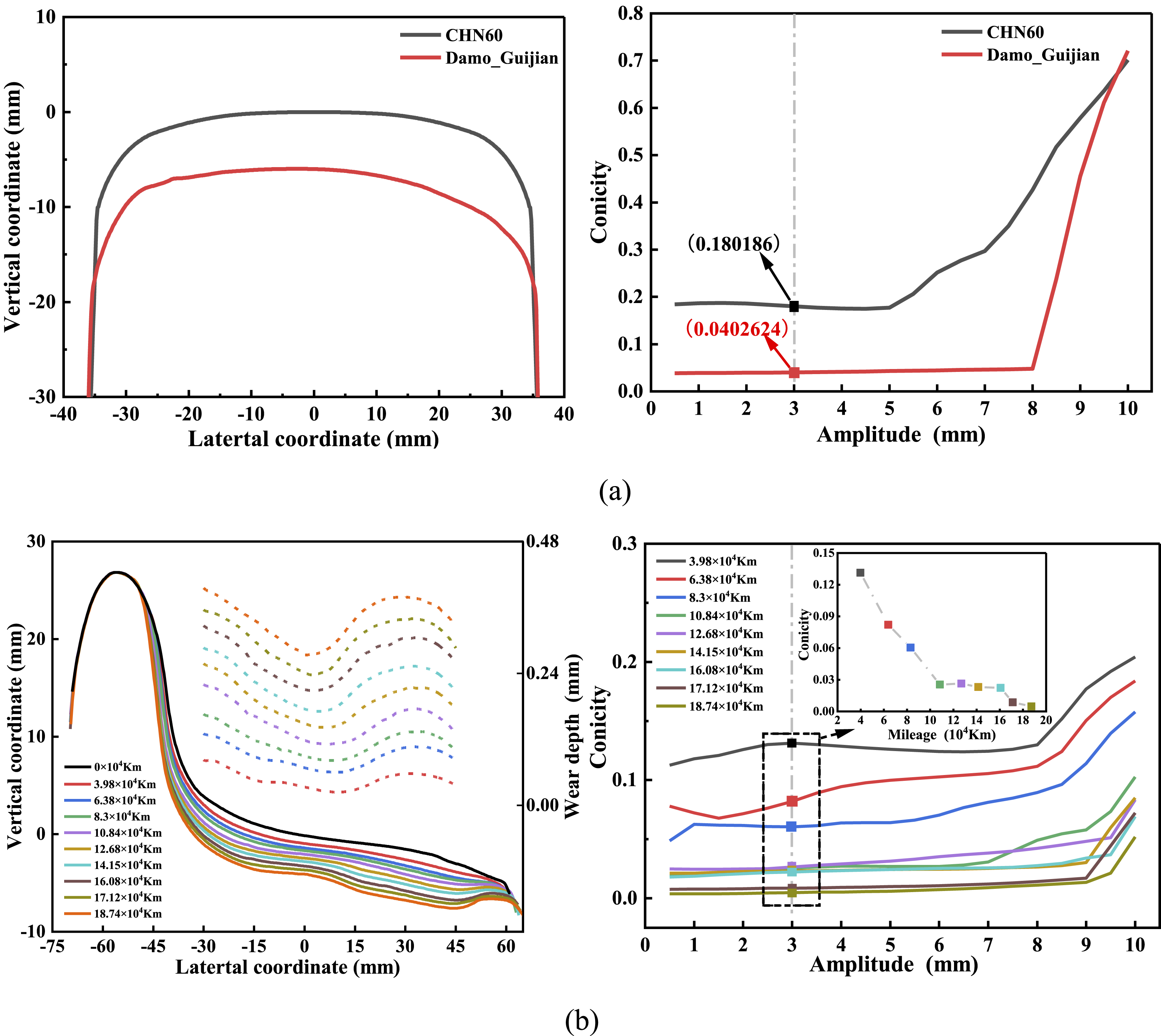
The wear analysis reveals two distinct behavioral patterns. Firstly, the wear rate demonstrates that the average tread wear depth approaches 4 mm at operational mileages below 200,000 km. Secondly, the wear distribution exhibits an abnormal pattern, with maximum wear depths occurring in the inner and outer tread regions rather than at the nominal rolling circle, where wheel-rail contact typically concentrates. Furthermore, Figure 4(b) indicates that the nominal equivalent conicity decreases progressively with increasing operational mileage, deviating significantly from conventional wear-induced conicity change patterns observed under standard conditions.
The model incorporates the WG50 track spectrum to account for track geometric irregularities. Figure 5 present the time-domain analysis and spatial wavelength distribution were obtained using the Welch method (Sun et al., 2021). The spectral analysis reveals the absence of peaks at 55.6 m in both lateral and vertical irregularities, corresponding to the frequency of 1.5 Hz at 300 km/h. This observation suggests that track irregularities exert minimal influence on carbody swaying oscillations. Furthermore, the vertical irregularity spectrum exhibits two distinct wavelength peaks at 1.4 m and 6.5 m, potentially attributable to rail surface wear heterogeneity and elevation deviations. Railway track irregularity condition: (a) time-domain analysis and (b) spatial wavelength distribution.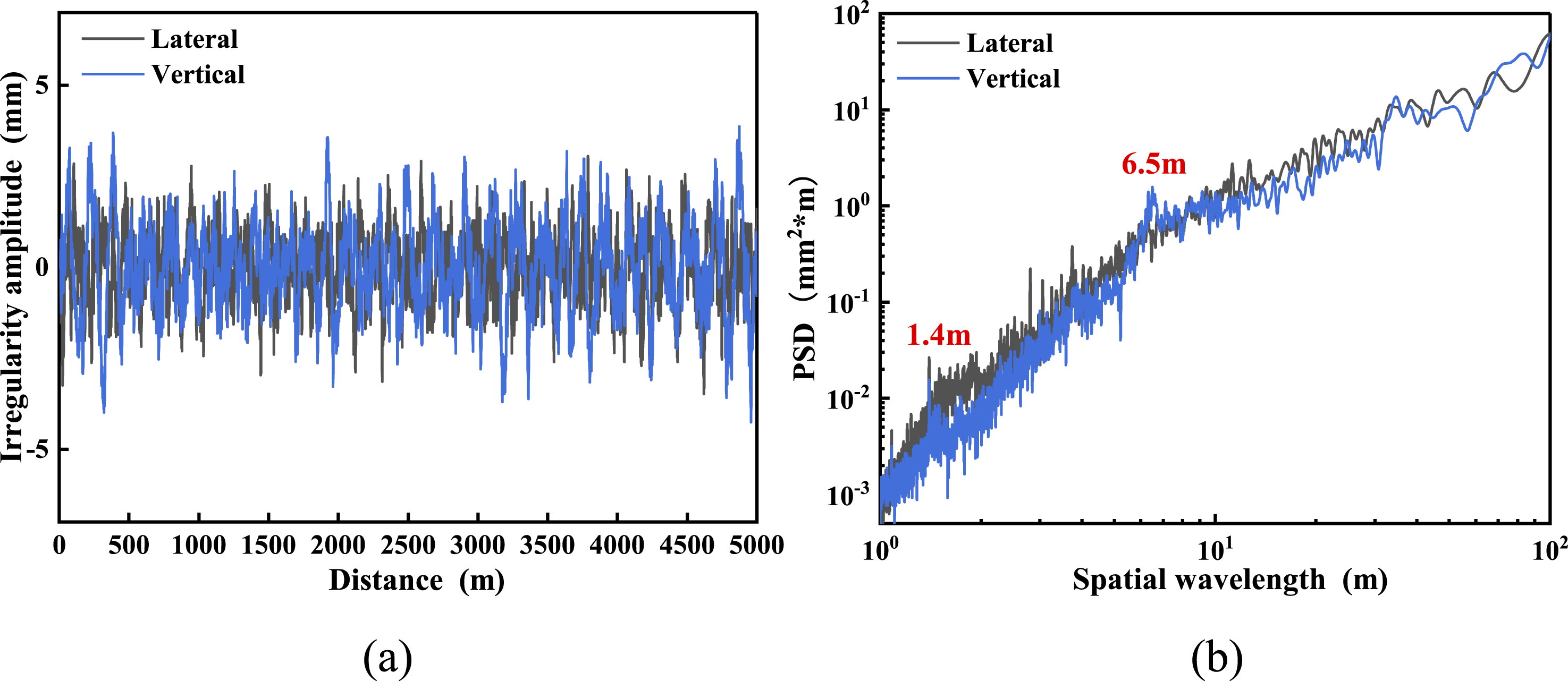
Model verification
The seated human-railway vehicle coupling model was validated through comparative analysis between simulation results and experimental data. Specifically, the vehicle sub-model was verified against measured carbody acceleration, while the human sub-model was validated based on existing research findings.
The established model was verified through simulations employing measured rail and wheel profiles. Carbody lateral acceleration is served as the primary comparison metric between experimental and simulation results, as depicted in Figure 6. The analysis demonstrates strong agreement between experimental and simulated data, particularly in terms of amplitude values and dominant frequency characteristics. Vehicle model validation-lateral acceleration of the carbody: (a) accelerometer locations in the carbody floor; (b) time frequency domain comparison.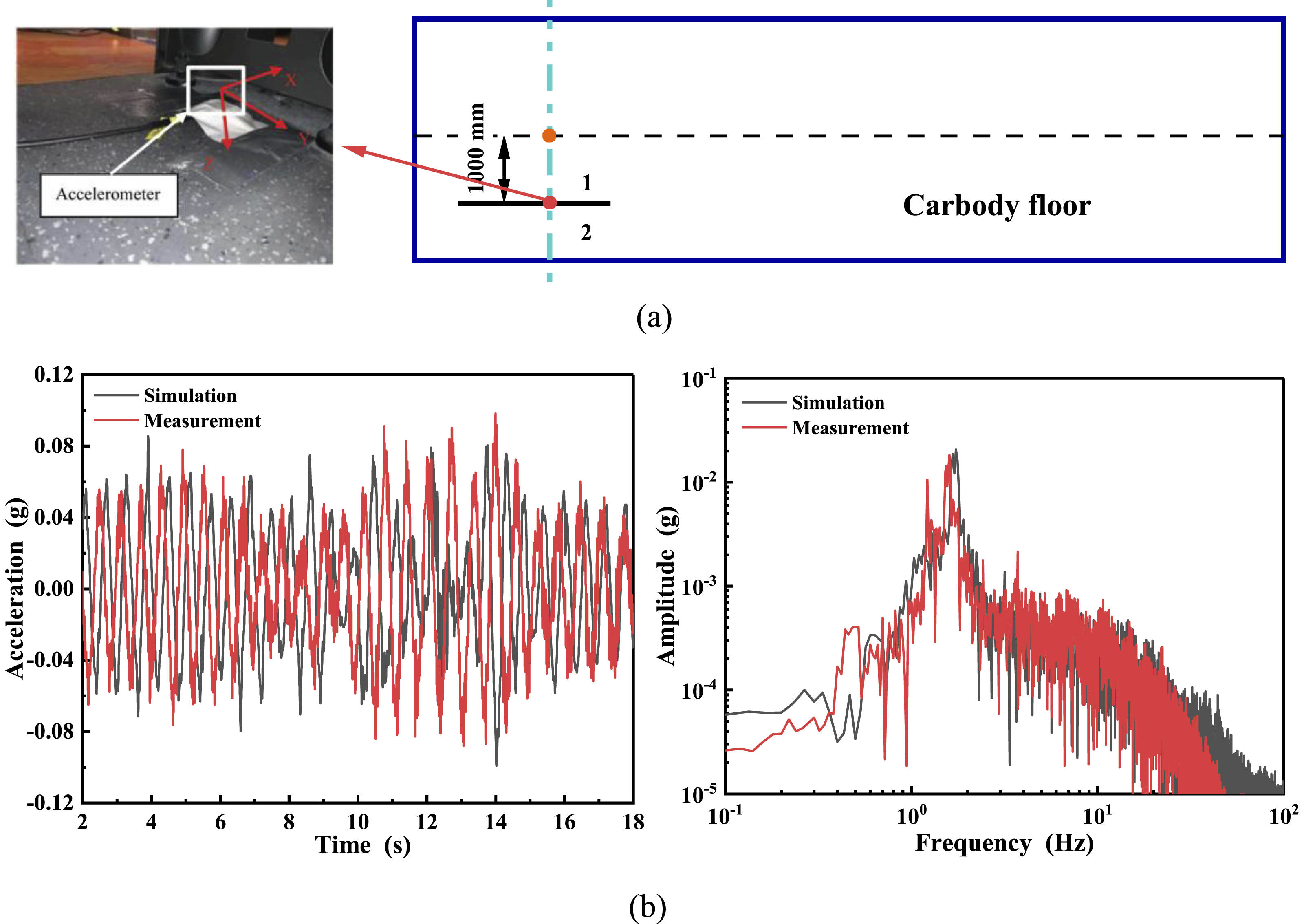
Validation of seated human body models primarily focuses on vibration transmissibility across anatomical segments, utilizing transmissibility characteristics for indirect identification of modal frequencies. The experiment was conducted on a 6-DOF hydraulic vibration cab simulator using a rigid seat, as shown in Figure 7. Participants were instructed to maintain an upright sitting posture with their backs firmly against the seat back and feet flat on the cab floor surface. Two single-axis accelerometers were secured via adhesive tape to the participants upper trunk to measure lateral and vertical accelerations. Additionally, two single-axis accelerometers were mounted at the seat base to capture lateral and vertical input vibrations of the carbody. During testing, the hydraulic vibration cab simulator employed the hydraulic vibration actuator to replicate vibrational conditions representative of actual vehicle operations. All input signals consisted of broadband random vibrations with a duration of 60 seconds. Repeat this experiment five times to identified the modal frequencies by calculating the vibration transmissibility from the carbody to the upper trunk. The experiment setup for measuring body transmissibilities of a seated subject.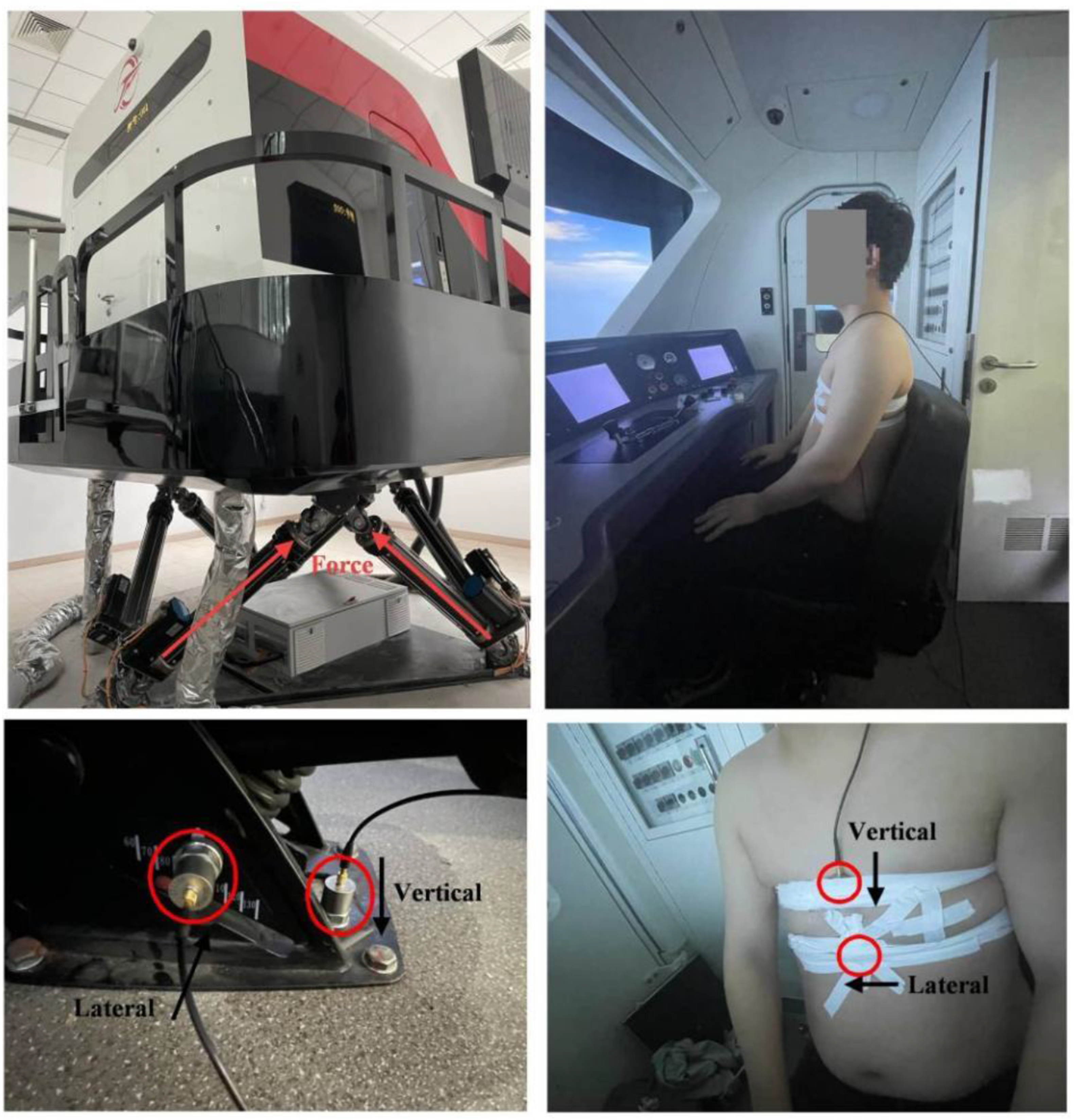
Under vibration excitation, the transmissibilities from the carbody to the upper trunk, as shown in Figure 8(a), exhibited different experiment diversity. The lateral transmissibility of the upper-trunk displayed a primary resonance between 0.9 and 1.1 Hz and a secondary resonance between 3.4 and 3.6 Hz. The vertical transmissibility exhibited a primary resonance between 0.8 and 1.2 Hz, a secondary resonance between 3.3 and 3.7 Hz, and a tertiary resonance between 6.2 and 6.8 Hz. No significant differences were observed in the resonance frequencies across individuals. The vibration transmissibilities from the carbody to the upper-trunk: (a) individual and mean and (b) measured and modeled.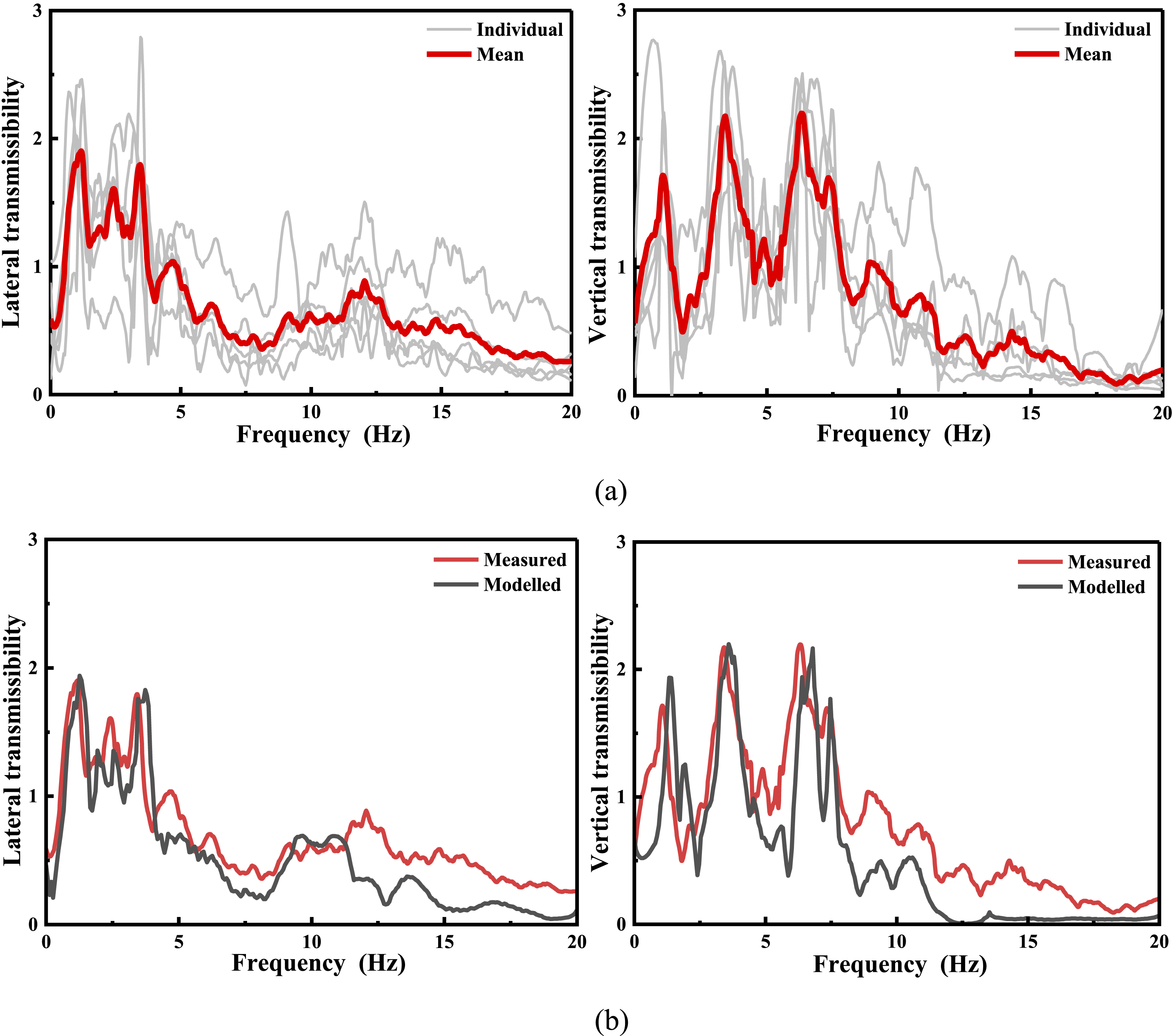
A comparison of model-predicted and measured transmissibilities from the carbody to the upper trunk of the subjects as shown in Figure 8(b). The agreement between experimental measurements and model predictions in both lateral and vertical directions confirms that the constructed human body model effectively captures the dynamic characteristics of anatomical structures at designated locations.
Dynamic response analysis
This section utilizes the seated human-vehicle dynamic coupling model to evaluate the vehicle dynamic response and its effects on the human body dynamic response. The analyses focus on two critical aspects: the effect of carbody swaying in vibration transmission mechanisms between the vehicle and human body, and the spatial variation of human body dynamic responses across different seating positions.
The influence of carbody swaying on responses of vehicle and human body
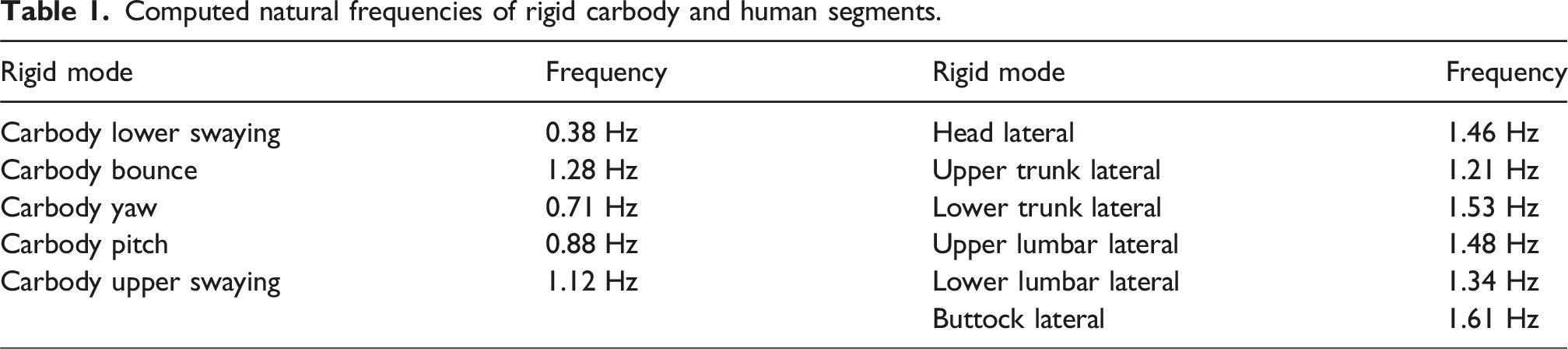
A comparative analysis of dynamic responses was conducted for both vehicle components (wheelset, frame, and carbody) and key human segments (buttock, lumbar regions, trunk sections, and head) under carbody swaying and stable conditions, with results presented in Figure 9. The results demonstrate that carbody swaying induces high lateral accelerations across all components while maintaining consistent dominant vibration frequencies at 1.5 Hz. Distinct vibration transmission patterns emerge between vehicle and human systems. Vehicle components exhibit progressive vibration attenuation from wheelset to carbody, primarily due to the damping effect of the secondary suspension system. Conversely, human body segments show progressive amplitude amplification from buttock to head, suggesting insufficient vibration energy attenuation and potential resonance effects. Dynamic responses of the coupling system under conditions of carbody swaying and stable: (a) time frequency domain results and (b) Statistical results.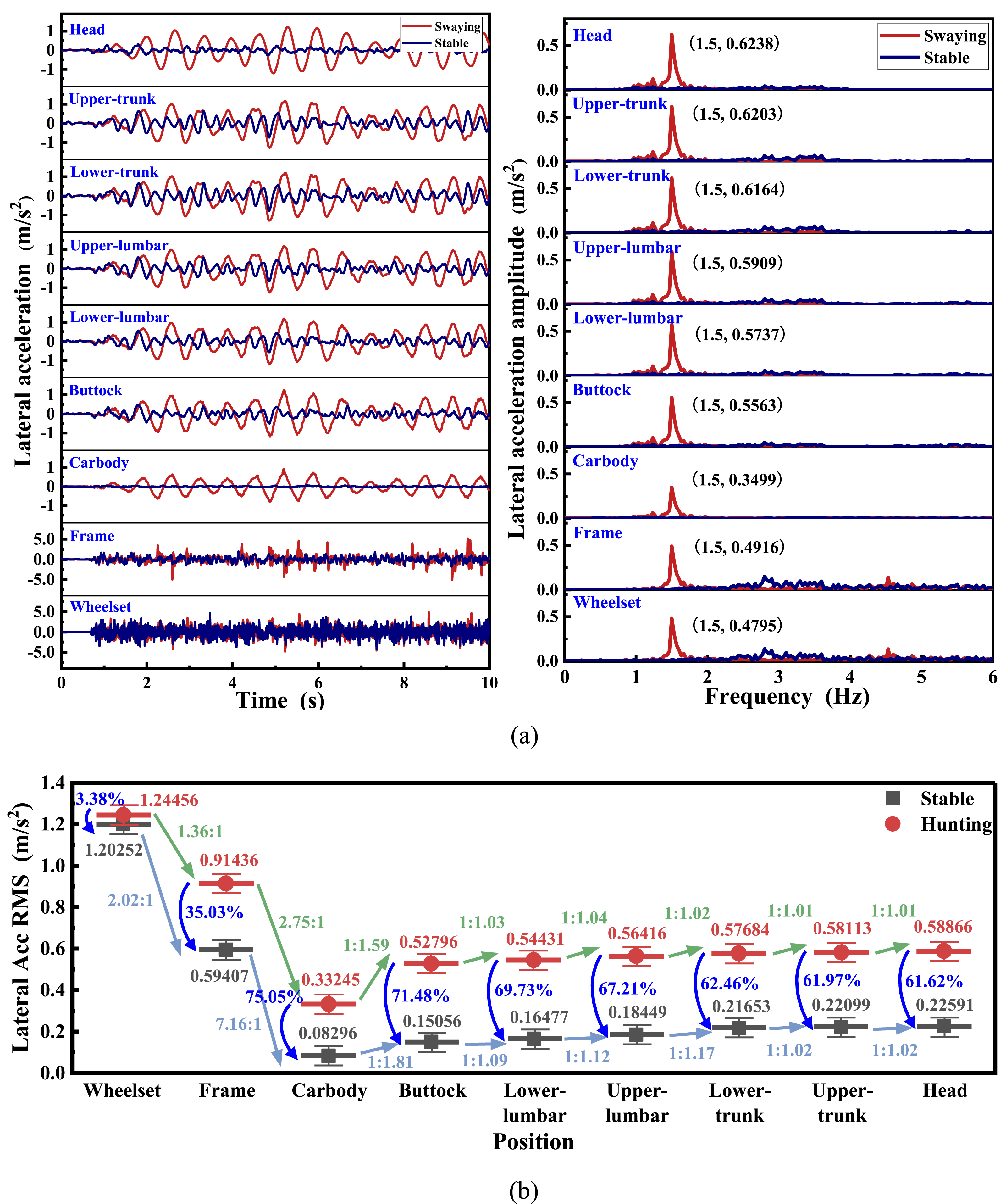
Computed natural frequencies of rigid carbody and human segments.
The influence of seat position on human body dynamic response
Passengers within a carriage exhibit a discrete random distribution pattern, which is influenced by multiple factors including seating arrangement, movement behavior, and physiological characteristics. To comprehensively investigate the human body response characteristics, it is essential to investigate the spatial variation of dynamic responses within the carriage by performing a comparative analysis across different seat locations.
Figure 10 present the lateral vibration characteristics of the carbody and the head under both carbody swaying and stable conditions across six seating positions (right/left rear, right/left middle, right/left front). Analysis reveals significant spatial variations in vibration frequency and amplitude. Notably, vibration amplitude exhibits progressive attenuation from rear to front positions, potentially attributable to the in-phase roll and pitch motions of the vehicle body generating opposing horizontal vibration components between front and rear floor sections, thereby intensifying lateral vibrations at the rear. As shown in Table 1, the head exhibits lateral vibration modal frequencies around 1.5 Hz. The carbody lateral vibration is transmitted directly to the human body through the rigid seat. The overlap between the head natural frequencies and the carbody swaying frequency induces resonance amplification, resulting in the head vibration amplitudes exceeding those of the carbody. Lateral acceleration frequency spectra of human and vehicle at different locations under carbody swaying and stable conditions.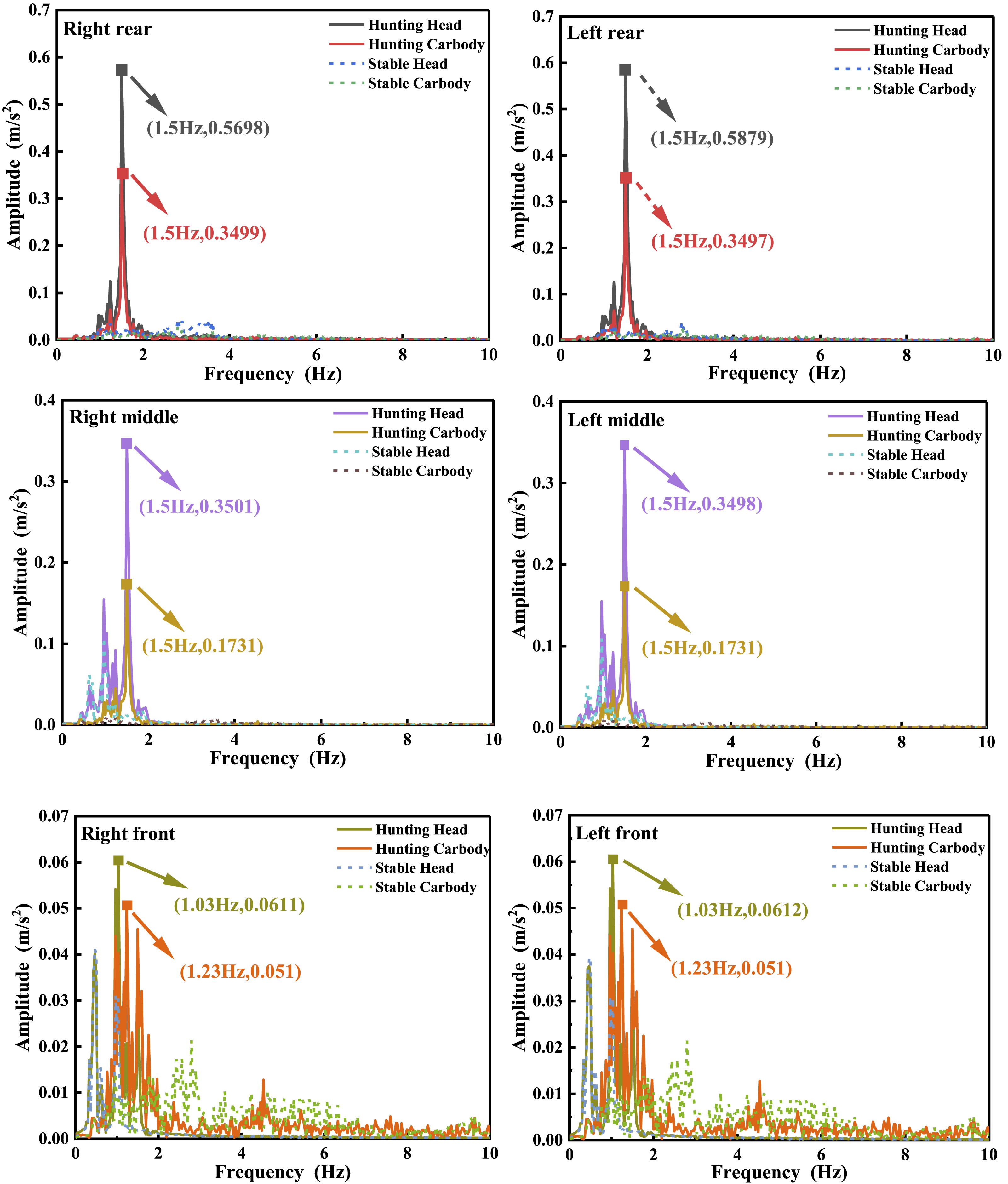
Comparative analysis demonstrates that forward seating positions exhibit increasingly prominent inherent vibration frequencies, primarily dominated by rigid-body modes of the vehicle structure. Additionally, bilateral vibration analysis reveals subtle differences between left-right symmetrical seats during carbody swaying oscillations, potentially reflecting vehicle symmetrical design considerations. These findings collectively indicate that seating position significantly influences human body vibration characteristics during carbody swaying oscillations, with potential implications for ride comfort.
Influence of carbody swaying evolution on human vibration response
This section presents a comprehensive analysis of carbody swaying evolution and human body response through systematic adjustment of key vehicle operational parameters. The investigation focuses on the influence of speed variations and the effects of wheel tread wear progression with accumulated mileage on both vehicle dynamics and human body vibration characteristics.
Analysis of the influence of running speed
A parametric variation of speed was firstly performed to analyze the vehicle stability of the vehicle under different running speeds and the corresponding dynamic responses of the vehicle and the human body. Two rail profiles, mentioned in Figure 4(a), were matched with the standard wheel profile S1002CN to simulate the normal and abnormal wheel-rail contact conditions, respectively. The bifurcation analysis, based on the brute-force method (Polach, 2012), were carried out and the results for the standard and excessive grinding rails are shown in Figure 11(a). The results indicate that under normal equivalent conicity (0.18), the vehicle exhibits favorable lateral stability even up to the speed of 400 km/h. However, under abnormal low equivalent conicity (0.04), carbody swaying occurs when the speed exceeds 130 km/h, and the vehicle remains unstable as the speed continues to increase. A significant amplitude increment in the wheelset lateral displacement from 2 mm to 7 mm occurs at the speed of 210 km/h. This speed acts as a critical threshold. Below this speed, the instability amplitude of the carbody exceeds that of the wheelset, whereas above it, the wheelset instability amplitude becomes dominant. The evolution of vehicle stability and dynamic responses of the coupling system: (a) bifurcation characteristics and (b) dynamic responses.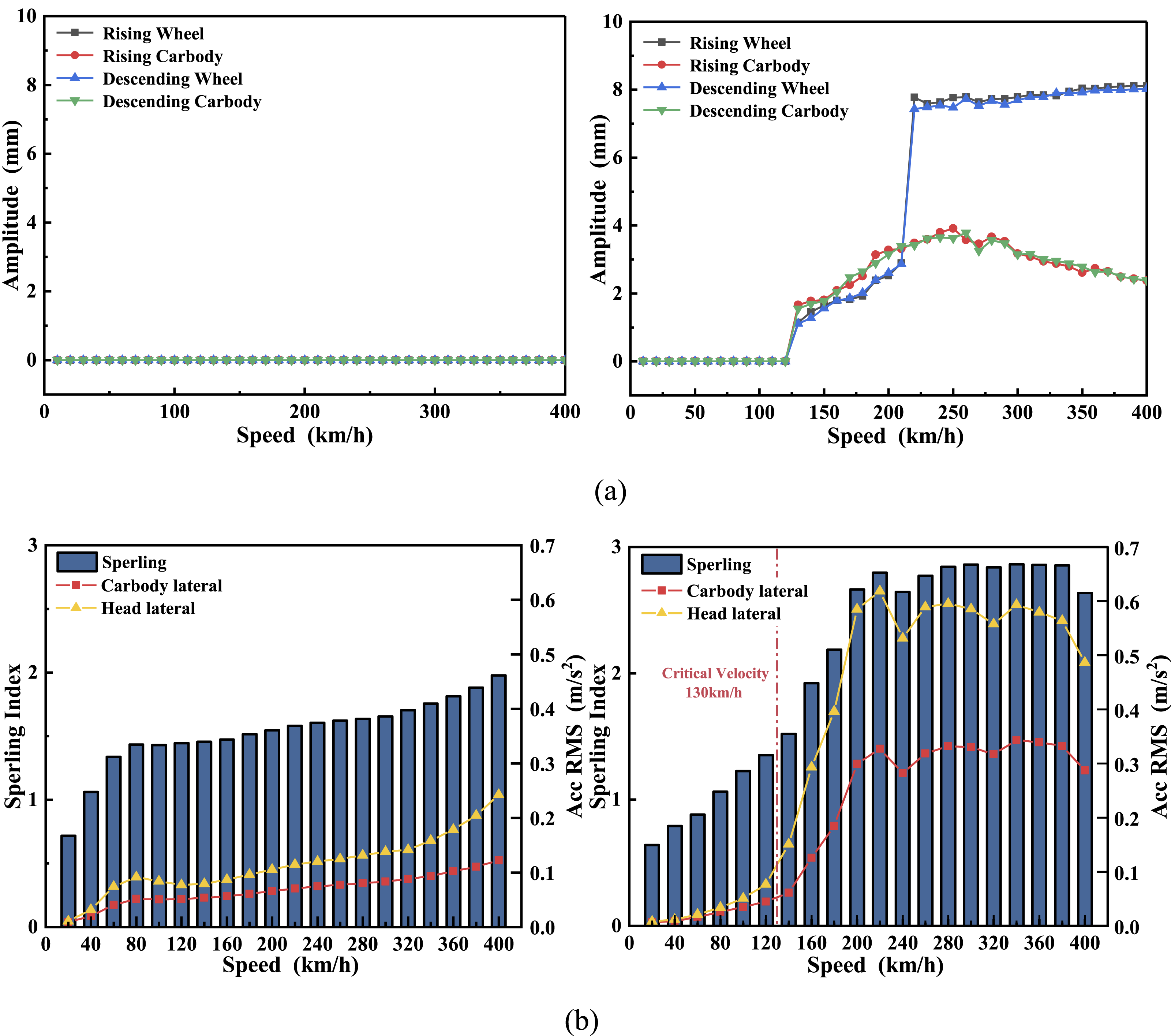
Figure 11(b) shows the dynamic responses of the carbody and the head of the human (including the Sperling index (Deng et al., 2021) and the RMS value of the acceleration) under two wheel-rail contact conditions, respectively. In stable conditions, the index as well as the RMS value for both carbody and head increase gradually with speed, remaining within acceptable limits (Sperling index is far below 2.5 for excellent level). However, carbody swaying triggers substantial response changes, with Sperling index reaching approximately 2.8 (nearly to unqualified) and RMS values reaching 3 times that of the stable condition at the same speed, highlighting its significant impact on dynamic responses of both carbody and human body. These findings establish carbody swaying as a critical factor influencing vehicle dynamic response and posing substantial threats to comfort of human body.
Analysis of the influence of wheel tread wear
Under continuous wheel-rail wear, the geometric relationship of wheel-rail contact exhibits time-varying characteristics as the operation mileage accumulates, leading to changes in vehicle stability, which in turn affects the vibration responses of both the vehicle and the human body. The relationship between operation mileage and vehicle critical speed of carbody swaying is presented in Figure 12(a). The vehicle maintains stable operation below a wear threshold of 64,000 km (the corresponding nominal equivalent conicity is 0.08 as shown in Figure 4(b)), with carbody swaying emerging beyond this critical point. This transition highlights the significant influence of the wheel tread wear degree on vehicle stability, marking a fundamental shift in dynamic behavior. The correlation between wheel tread wear (as a function of mileage) and lateral accelerations of both carbody and head under the constant speed of 300 km/h is shown in Figure 12(b). The selection of 300 km/h as the threshold for critical speed analysis is based on its status as the predominant operational speed for high-speed railways in numerous countries, including China, which establishes direct relevance to extensive real-world operational scenarios. When the vehicle’s critical speed falls below 300 km/h, it indicates that carbody swaying will occur during normal operation, severely compromising both operational stability and ride comfort. Under the stable condition, lateral accelerations remains within an acceptable range (below 0.3 m/s2). However, the onset of carbody swaying triggers substantial increases in vibration amplitude, indicating significant changes in dynamic response characteristics. These findings demonstrate that both the running speed-induced carbody swaying and the wheel tread wear-induced carbody swaying affect the vehicle dynamic response and pose substantial threats to comfort of human body. The influence of wheel tread wear on the evolution of stability and human vibration response: (a) Tread wear versus critical speed (b) Tread wear versus car body and head lateral acceleration.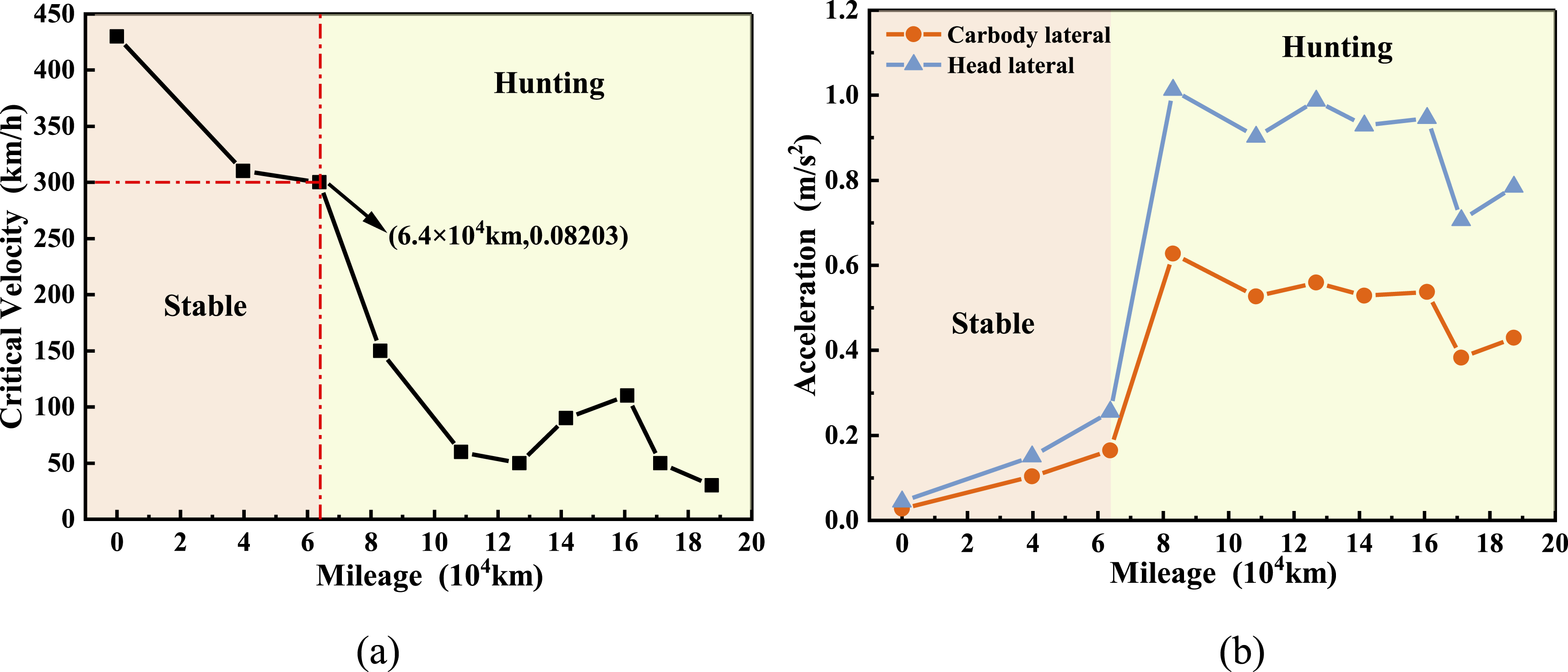
Influence of human body on vehicle dynamic response
The human body functions as a mass-spring-damper element in the coupled system, engaging in vehicle vibration and possessing inherent damping properties that enable it to act as a vibration absorber. Consequently, it is essential to study the influence of the human body on vehicle dynamic response.
The human-vehicle coupling model is shown in Figure 3. The analysis compares a human body model (abbreviated as human model) with stiffness and damping properties against an equivalent-mass rigid body (abbreviated as rigid model) fixed to the seats. Additionally, the study investigates the influence of passenger quantity on vehicle dynamic response by progressively adding passengers from rear to front, with each increment corresponding to one seat row.
The influence of human body on vehicle stability was firstly investigated. The analysis focused exclusively on deceleration conditions, with speed decelerating from 400 km/h to 10 km/h and large initial wheelset displacement. Figure 13(a) present the bifurcation diagrams for wheelset and carbody, respectively, revealing different stability distributions for the human model and the rigid model. The vehicle incorporating the human model demonstrates carbody swaying at the intervals of 120–210 km/h and 300–400 km/h. For the rigid model, the corresponding vehicle demonstrates carbody swaying at the intervals of 120–250 km/h and 300–400 km/h. Furthermore, the human model configuration exhibits higher amplitudes of limit cycle in both wheelset and carbody components. These results can be attributed to the damping effects of the human body structure, which reduce the speed interval of vehicle carbody swaying. Conversely, the stiffness and damping elements in the human model amplify the equivalent mass-spring effect through dynamic coupling, resulting in greater lateral displacement amplitudes compared to the rigid model. Comparison of vehicle performance between human model and rigid model: (a) bifurcation characteristics and (b) vehicle responses.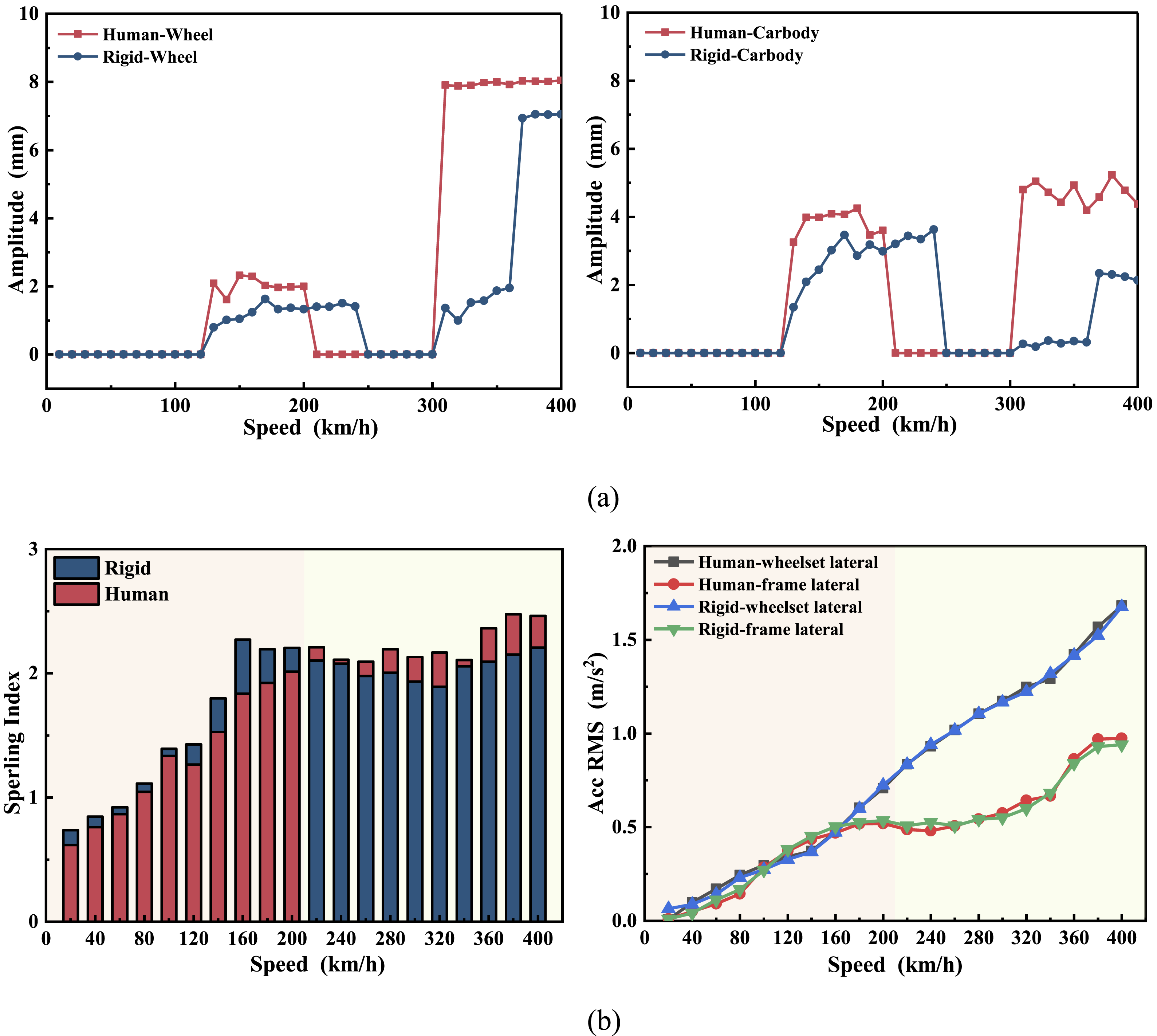
The dynamic responses of the vehicle components, including the wheelset, the bogie frame and the carbody, were analyzed across a speed range of 20–400 km/h for both human model and rigid model, as shown in Figure 13(b), the Sperling index is used for the evaluation of carbody vibration. The results demonstrate that Sperling index of the rigid model is larger than that of the human model below 210 km/h, while the opposite trend emerges above this speed. Notably, both models exhibit nearly identical RMS of lateral accelerations for wheelsets and frames, suggesting that human self-damping primarily influences vehicle body vibration.
Time domain and spectrum analyses of the vehicle lateral accelerations were further performed at two typical speeds 160 km/h and 380 km/h, and the results are shown in Figure 14. It can be seen that at these two speeds, the dominant vibration frequencies of different vehicle components remain consistent, and the dominant frequencies for both the human model and the rigid model are identical, corresponding to the frequency of vehicle carbody swaying. Furthermore, at the speed of 160 km/h, the vibration amplitude at the instability frequency for the rigid model is significantly greater than that for the human model (approximately three times on the carbody). Conversely, at the speed of 380 km/h, the vibration amplitude at the instability frequency for the human model is greater than that for the rigid model (approximately two times on the carbody). Due to the presence of high-frequency vibration components in the wheelset and bogie frame, the differences in the low-frequency range are not prominently reflected in the RMS values. The results indicate that the human body exhibits speed-dependent effects, that is, it provides vibration reduction at lower speeds but amplifies vibration at higher speeds. Time domain and spectrum analyses at certain speeds: (a) 160 km/h and (b) 380 km/h.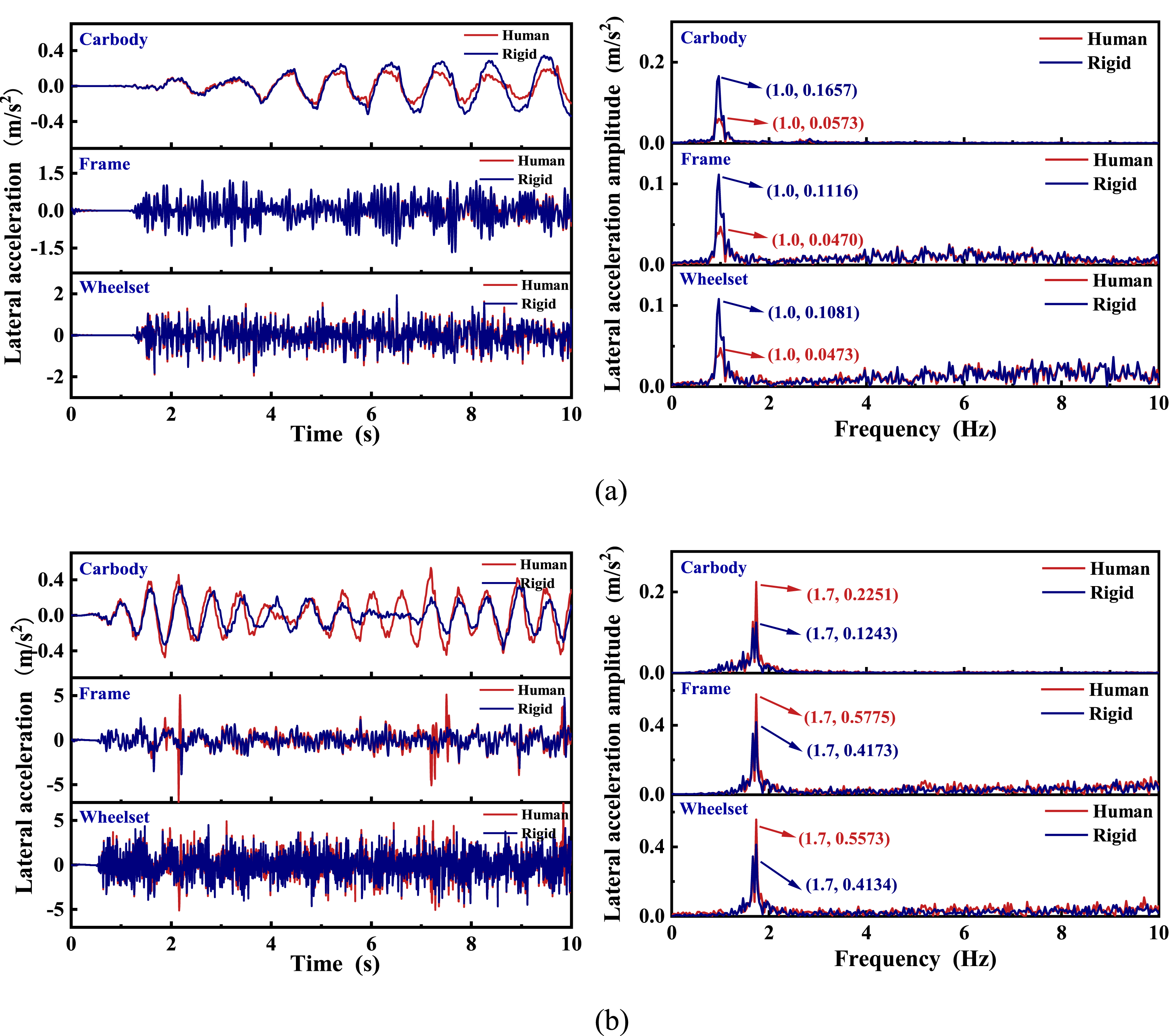
Considering the effect of passenger boarding and alighting, the influence of passenger quantity on vehicle dynamic responses was further investigated, and the results at the speed of 300 km/h are illustrated in Figure 15. It can be seen that as the number of passengers increases, vibrations in different parts of the vehicle decrease, with the attenuation of frame vibrations being more pronounced than that of the wheelset. Additionally, the difference of carbody dynamic response between the human model and the rigid model becomes more significant as the number of passengers increases. Influence of passenger quantity on vehicle vibration: (a) Sperling index; (b) RMS values of wheelset and bogie frame.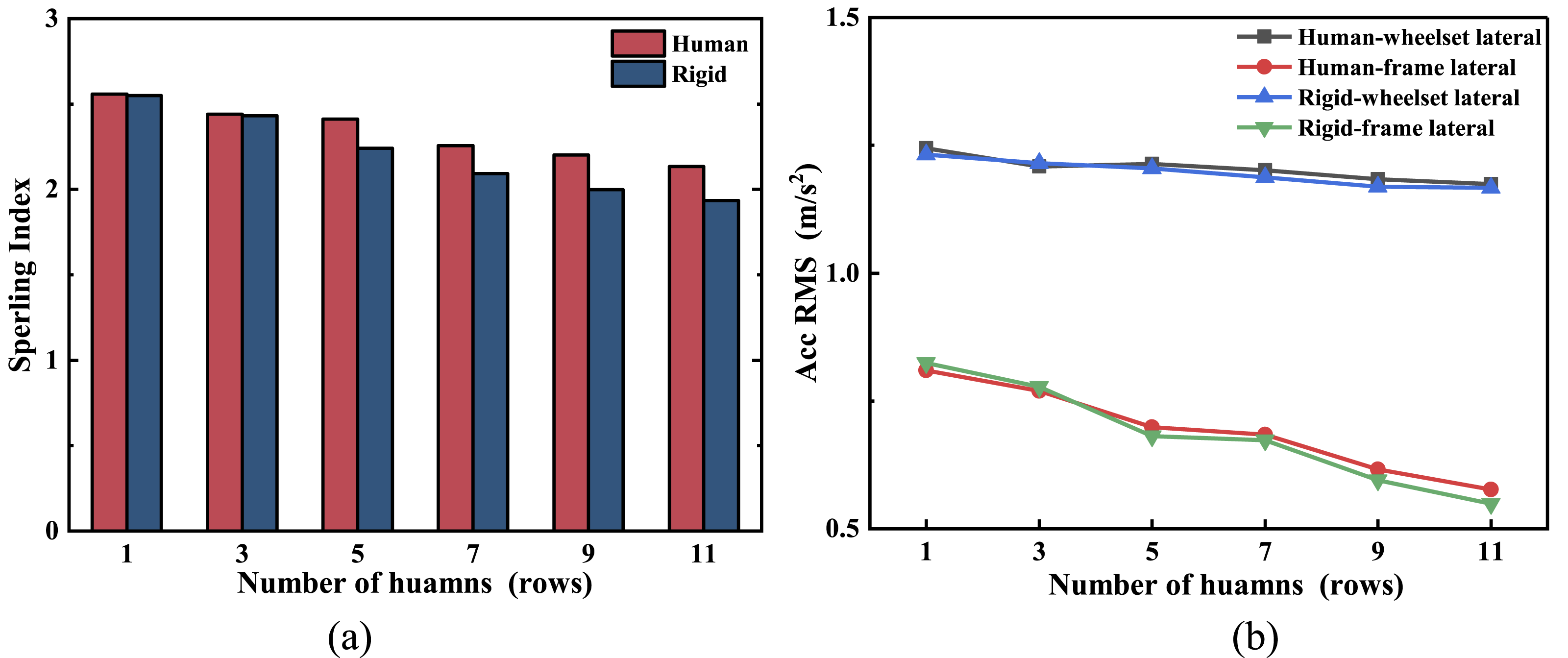
Summary, conclusions, and discussions
This study explored the dynamic interaction mechanisms between the seated human body and the high-speed railway vehicle focusing on carbody swaying, aiming to enhance vehicle ride comfort and operational stability. The following conclusions can be drawn: (1) Under carbody swaying, significant differences exist in vibration transmission between vehicle components and human body parts. Vehicle vibrations gradually attenuate, while human body vibrations amplify progressively from the hips to the head, with the lumbar region showing the most pronounced increase and the head exhibiting the highest vibration amplitude. Additionally, vibration perception varies among passengers in different seats installed at different positions within the carriage. (2) Carbody swaying significantly increases the lateral motion amplitudes of the vehicle, leading to notable increasing in the RMS values of lateral acceleration for both the carbody and the human. Wheel tread wear is a critical factor influencing vehicle dynamic stability, with a threshold beyond which the dynamic behavior of the vehicle-human coupling system undergoes significant alterations. (3) The structural properties of the human body provide damping to the vehicle, reducing the speed range of carbody swaying. However, the human body amplifies the equivalent mass-spring effect of the system due to dynamic coupling, leading to the enlargement of response amplitude of carbody swaying. At lower speeds, the human body’s self-damping characteristic reduces vehicle vibrations, but at higher speeds, it may amplify vibrations. As the number of passengers increases, the total mass and inertia of the vehicle also increase, enhancing the vehicle’s damping capacity against lateral vibrations and effectively reducing the vibration amplitude during operation.
However, this study possesses certain limitations. The research focus exclusively examines the influence of carbody swaying, induced by low equivalent conicity, on the dynamic characteristics of the human-vehicle coupled system, rather than delving into its root excitation source: the dynamic evolution mechanism at the wheel-rail contact interface. In reality, wheel-rail contact relationships are not constant but are time-varying parameters that evolve dynamically with wear and track conditions. This study employed a fixed low value of equivalent conicity to simulate a typical instability scenario, which does not encompass this dynamic variation process.
Building upon these limitations, subsequent research will prioritize investigating the core mechanism of wheel-rail contact dynamics. Future work will focus on: (1) Investigating the influence of time-varying wheel-rail contact conditions: Future work will develop a coupled human-vehicle dynamics model under time-varying wheel-rail contact conditions to quantify the direct impact of dynamic contact parameter variations on coupled human-vehicle system. (2) Enhancing seat model: Future work will develop an advanced seat model incorporating the structural flexibility and connection characteristics between the seat and vehicle floor to better represent real-world conditions.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper was funded by the National Natural Science Foundation of China [Grant number 52405139], and the Natural Science Foundation of Zhejiang Province [Grant number LQ24E050013, LZ22E050001], and the Natural Science Foundation of Jinhua City [Grant number 2023-04-014, 2024-1-003], and the The Open R&D Project of the State Key Laboratory of Rail Transit Vehicle System [Grant number RVL2514].
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
Data will be made available on request.