
Abstract
This research outlines the development of an adaptive finite-time fractional-order sliding-mode controller aimed at achieving stabilization and control for the inverted pendulum cart system with limited sensing range of sensors. The proposed algorithm is formulated on the basis of a Barrier Lyapunov function, which unites the benefits of innovative adaptive fractional-order sliding-mode control with a finite-time methodology. The input force is established to stabilize the nonlinear inverted pendulum cart system while adjusting both the position and the pendulum angle to a value of zero. To enhance the robustness of the proposed controller in the face of uncertainties related to the friction and viscous coefficients of the system, these parameters are compensated through an adaptive multi-layer neural-network algorithm. Both the simulation results and the experimental findings validate that the stabilizing controller, which integrates a constrained adaptive finite-time fractional-order sliding-mode control, effectively stabilizes the nonlinear inverted pendulum cart system.
Keywords
Introduction
A variety of practical applications, such as robot balancing, segway, and hoverboard riding, as well as the operation of a rocket propeller, fundamentally rely on the principles of the nonlinear inverted pendulum cart (IPC) system. The management of an IPC system presents significant challenges due to high sensitivity, and inherent instability (Qu et al., 2025; Ayad et al., 2024; Mehedi et al., 2020; Hu et al., 2024). Controlling a nonlinear IPC system presents a complex challenge because of the numerous real-world phenomena that contribute to its instability, nonlinearity, and underactuated nature (Basaran, 2025; Daksh and Mishra, 2025). A multitude of initiatives have been undertaken to improve the motion control of nonlinear IPCs to guarantee their stability. These initiatives encompass a range of control strategies, including sliding-mode control (Pathak et al., 2024; Mokhtare et al., 2022; Xiong et al., 2025), predictive control (Tian et al., 2021), output feedback control (Messikh et al., 2022), fractional-order PID controller (Dey et al., 2025), robust control (Naderolasli and Chatraei, 2019; Mahmoud et al., 2022), among others.
In practical systems, the existing constraints are unavoidable, including limited sensing ranges, restricted field-of-view (FOV), and specific performance. Consequently, exceeding these constraints during operations can lead to a decline in the system performance and potentially result in system instability (Mohren et al., 2020; Naderolasli, 2025a). Adjusting the constraints in control design has emerged as a critical concern across various domains of science and engineering, owing to the theoretical difficulties and unique traits observed in real-world performance (Feng et al., 2023; Wang et al., 2019). To address the constraints of these output states, the Barrier Lyapunov function (BLF) is utilized in the numerous knowledge acquisition processes to ensure that the constraint states remain within the predefined and limited bounds (Naderolasli, 2025b; Chu et al., 2023; Tian et al., 2025).
Achieving a convergence rate of stabilization error to zero becomes increasingly complex when both parameter uncertainties and unmodeled dynamics are present in the design of controllers (Kang et al., 2022; Huang et al., 2020; Xiong and Chen, 2025). The stability of finite-time control is examined across various nonlinear systems, highlighting significant benefits such as high tracking accuracy, swift convergence rates, and robust disturbance rejection capabilities (Yao, 2020; Mofid et al., 2023; Aly et al., 2022; Hu et al., 2024). Nevertheless, the issue of finite-time stability in the nonlinear IPC systems, particularly when accounting for the constrained output states amidst uncertain parameters and unmodeled dynamics, remains a considerable challenge and is still an open question. The fixed-time approaches typically necessitate substantial control gains to ensure that the convergence time remains unaffected by the initial conditions. In contrast, the finite-time approaches demand the lower control gains, which consequently facilitate their practical application owing to the reduced amplitude of the control signal. Furthermore, the predefined-time convergence method, in contrast to the finite-time method, intensifies system jumps, induces transient instability, and heightens sensitivity to variations in parameters.
Driven by the aforementioned discussions, the constrained control of nonlinear IPC systems faces challenges due to the lack of precise measuring instruments, alongside rising costs and weights. Consequently, the measurement limitations will be imposed on the system, necessitating that these state constraints be taken into account during the controller design. This paper explores the impact of these restrictions, which are characterized as time-varying asymmetric constraints that influence stabilization errors. To address this challenge, an asymmetric BLF-based controller is incorporated with the constrained fractional-order sliding-mode control to manage nonlinear IPC systems that have a restricted sensing range, aiming to tackle these time-varying constraints. Furthermore, a finite-time approach is integrated with the proposed constrained controller to enhance the convergence rate of stabilization errors towards zero in the context of fractional-order sliding-mode control of nonlinear IPC systems.
The major contributions of this article are outlined as follows: (i) In comparison to the current findings documented in the literature (Lei et al., 2024; Pesterev and Morozov, 2022; Nguyen et al., 2023), the IPC systems characterized by state-space structures are universally nonlinear with respect to their parameters. To maintain the stabilization errors of these systems with limited sensing range, a constrained control design utilizing the time-varying asymmetric BLF is proposed to tackle the difficulties presented by defined and restricted boundaries resulting from the limited sensing range. (ii) In comparison to all prior constrained controllers (Liang et al., 2021; Zauner et al., 2023; Wang et al., 2019), the finite-time methodology is integrated with the BLF-based control design within the constrained fractional-order sliding-mode control of the nonlinear IPC system, aiming to enhance stabilization accuracy, achieve a rapid convergence rate, and improve disturbance rejection capability. The earlier selections for controller gains, initial conditions, and restricted bounds cope the predetermined analysis and assumptions of the closed-loop system while defining the appropriate output state constraints. (iii) Despite comprehensive studies on the nonlinear IPC systems (Mondal and Dey, 2020; Irfan et al., 2018; Sanjeewa and Parnichkun, 2022), the design of the controller for constrained fractional-order sliding-mode control integrates a multi-layer neural network and an adaptive-robust structure. This integration seeks to ensure robustness against uncertainties in parameters, unmodeled dynamics, and approximation errors associated with neural networks that are inherent in the dynamic equations of IPC systems. (iv) In contrast to the majority of results that are purely theoretical in nature within Literature, the proposed controller is particularly employed in the design and experimental execution of the nonlinear IPC system within the control laboratory, addressing all practical challenges encountered in these systems.
The remainder of this paper is structured in the following manner. Preparations and explanations of the problem are detailed in Section 2; the implementation of adaptive finite-time fractional-order sliding-mode control for a state-constrained IPC system with limited sensing range is discussed in Section 3; Section 4 presents the simulation results and experimental findings, and the conclusion of the paper is found in Section 5, respectively.
Preparations and discussions about challenges
The modeling of the inverted pendulum cart system
The essential geometric configuration of a state-constraint IPC system is depicted in Figure 1. This system comprises a cart that travels along the horizontal plane and a pendulum that swings around a defined pivot. The objective is to develop a controller τ
i
for the nonlinear IPC system to maintain the stabilization errors of the system within the specified limits. This system exhibits instability, and its dynamic equations can be represented as equation (1): The geometric configuration of a state-constraint IPC system.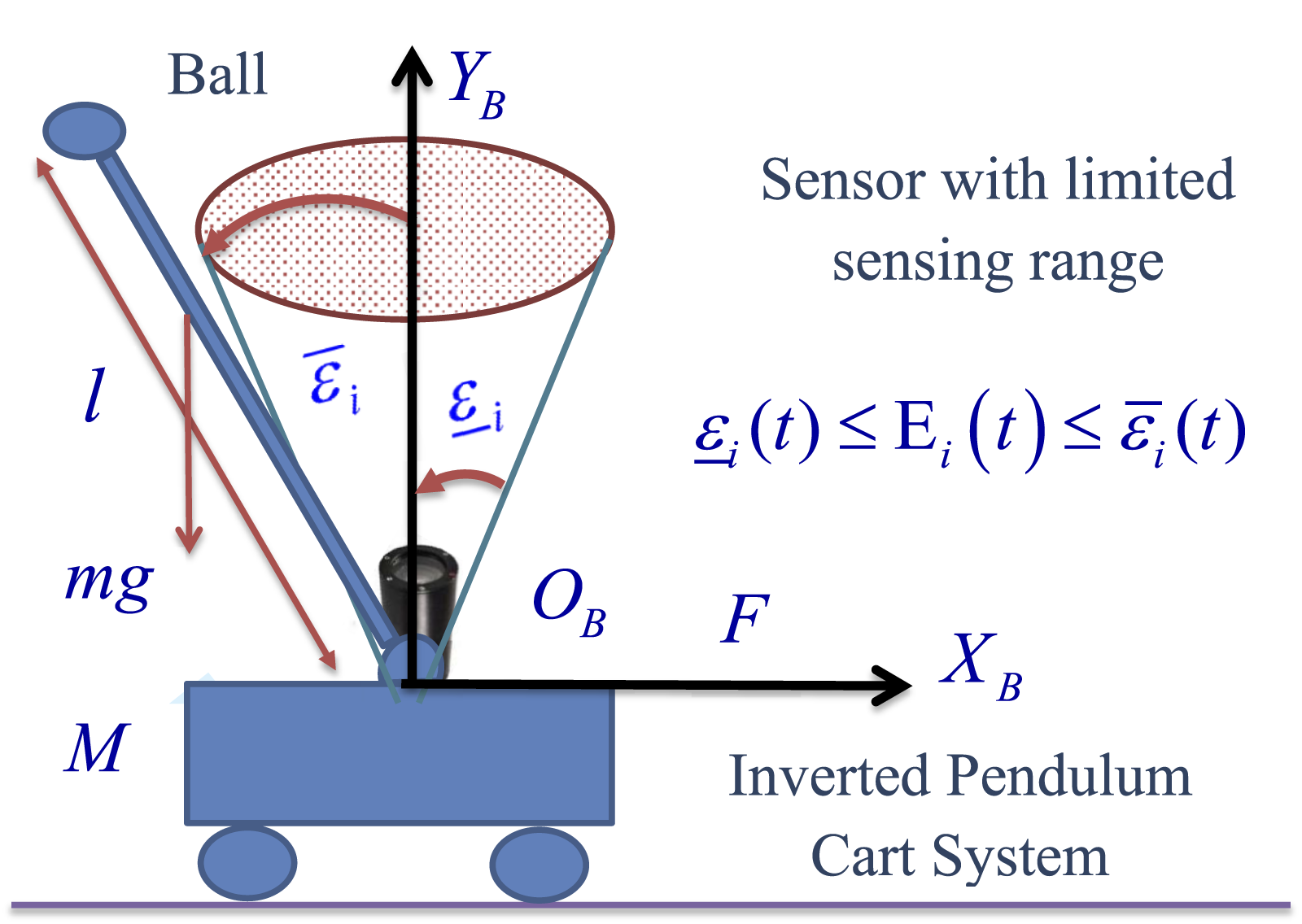

To facilitate the simplification of the mathematical equations pertaining to the proposed controller design, the dynamic equation (1) may be reformulated as follows:






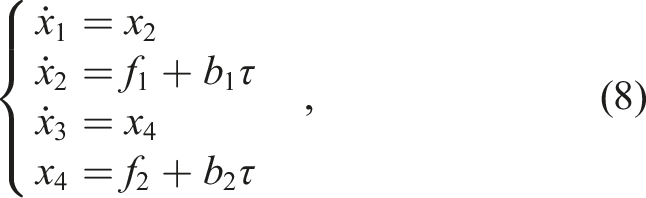
In accordance with the dynamic equations of IPC system obtained in equation (2), the state-space equations for the nonlinear IPC system can be derived as shown in equation (8):
To attain the previously mentioned control objectives, the subsequent assumptions have been taken into account in addressing the constrained control problem and the practical execution of nonlinear IPC system.
Barrier Lyapunov function (BLF)
In order to prevent the transgression of states beyond the defined limits, it is proposed to employ a BLF-based approach to address the constrained control issues. A notable feature of BLFs is that their arguments tend to infinity as the system states approach the boundaries of the defined limits. This characteristic enables us to tackle practical constraints related to the state limitations and to avert the violation of state constraints as specified in equation (19). Consequently, an asymmetric time-varying BLF is implemented to avoid boundary violations and to ensure that all output states remain within the established and limited bounds. The subsequent Lemma articulates in a formula the structures of the BLF, ensuring that the state restrictions are not violated. Tee et al. (2011):For any positive constants




The concept of the fractional-order derivative
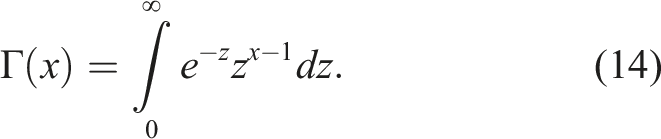
Numerous definitions for the fractional-order derivative have been suggested in academic literature, including those by Riemann–Liouville, Grunwald–Letnikov, and Caputo. In this research, the Caputo definition is utilized. According to the Caputo definition, the fractional-order derivative of a given function

The implementation of fractional-order derivatives and integrals is carried out in the MATLAB software through the utilization of various toolboxes. This study specifically employs the non-integer toolbox to approximate the fractional-order operators utilizing high-order ordinary transfer functions.
Design of adaptive finite-time fractional-order sliding-mode controller for the nonlinear IPC system
The objective of sliding-mode control is to establish the control signal that guides the system states towards a specified sliding surface and subsequently drives them to zero via that surface. Once the system states arrive at the sliding surface, it is essential to ascertain the equivalent control signal that will keep the states on the sliding surface and direct them to zero through this surface. In scenarios where the states are either within or beyond the sliding surface, a switching term must be incorporated into the equivalent control signal to propel the system states towards the surface.
In addressing the stabilization challenge of the nonlinear IPC system, it is essential to modify the input force τ in order to guide the cart position (x1) and the pendulum angle (x3) towards zero. To accomplish this control objective, the subsequent fractional-order sliding surface is taken into account.

Assume the fractional-order sliding surfaces E1 and E2 in equation (15) υ > 0, ω ≤ 1 and c1, c2 > 0. The dynamics E1 = E2 = 0 are asymptotically stable.
For the evidence, readers who are interested may consult the reference Jafary and Tabatabaei (2022).
In the scenario where υ = ω = 1, an integer-order sliding surface is achieved. By applying the Laplace transform to the sliding surfaces presented in equation (15), the characteristic equations for the integer-order sliding surfaces are derived as
In accordance with the sliding-mode principle, it is possible to derive the equivalent control signals by setting the time derivative of the sliding surfaces to zero. The time derivatives of these specified sliding surfaces presented in equation (15) can be expressed as shown in equation (16):

By setting both the sliding surface dynamics

In the proposed fractional-order sliding-mode controller, the fractional-order sliding surfaces have been implemented, and as a result, the fractional-order integral of these error surfaces has been computed. This issue revolves around fractional-order integral calculus, employing Caputo’s definition alongside widely used techniques such as Grunwald–Letnikov, fractional Euler approximation, fractional-order Adams–Bashforth–Moulton method, and the Oustaloup frequency approximation method for effective control Li and Cai (2019). In this study, a modified Oustaloup method is employed to address this issue in both simulation and practical hardware implementation, approximating the fractional-order operator with an integer-order approximation within the frequency domain.
In typical industrial control systems, the presence of physical constraints and restricted measurement principles, which include limited resolution and bandwidth, along with measurement saturation, noise, and environmental interference, leads to inherent sensor limitations in sensing capabilities. The implementation of sensors with restricted range in practical applications results in inaccurate feedback from the output data of various systems, consequently negatively impacting the performance of their control systems and presenting numerous challenges. Hence, this paper proposes an adaptive finite-time fractional-order sliding-mode controller designed for nonlinear IPC systems that encounter limited sensing capabilities. The limited sensing range of these sensors is frequently represented by a conical space defined by two upper and lower bounds, as specified in the sensor datasheet. By taking into account the feedback derived from the output data of these sensors and the corresponding error definitions, these bounds will have a direct influence on the system error boundaries under the constraints imposed by the system as follows:

In addition, there are limitations that include the feasibility conditions on the initial values of output state errors in the control design. Specifically, if the set of acceptable primary values guarantees the features of the output state constraints (19) for the asymmetric BLFs, then the feasibility conditions will be ensured in the future. Therefore, before the stabilization error Ei approaches the boundary limits
At this stage, the limitations of the sensors are represented as constraints for stabilization. Consequently, the objective of control is to follow the desired trajectory while ensuring that the measurement constraint


Given that the constraint on stabilization error (19) is time-varying, the time derivative of the proposed BLF V1 will require extensive calculations and may become cumbersome. Therefore, to address the time dependency, the following variable transformation is suggested:


This derived equation will replace in the design of the controller and the proof of stability, owing to the straightforward nature of the relationships, which encompass the asymmetric state errors resulting from the variable transformation and the non-time-varying characteristic of the BLF (22). It is evident that the proposed BLF V1 is both positive-definite and continuously differentiable within the compact set

By substituting the specified coordinate transformation outlined in equation (22) along with the limits of constrained states

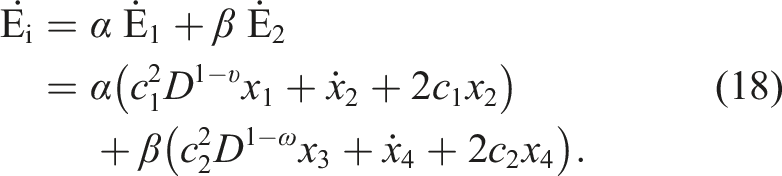
By replacing equations (17) and (18), the time derivative of the proposed BLF is determined using the stabilization errors as shown in equation (26):
Consequently, in relation to the time derivative of BLF (26), the proposed adaptive finite-time fractional-order sliding-mode control structure is organized as follows:






Furthermore, the subsequent equation is derived, which is employed in the proof of stability:

The term for switching, as indicated in equation (30), is utilized within the control signal to achieve the reaching condition during the sliding-mode control design process. In accordance with Lemmas (1–2), and by substituting the equations (8) and (27)–(30), along with the relationship

It is clear from equation (34) that
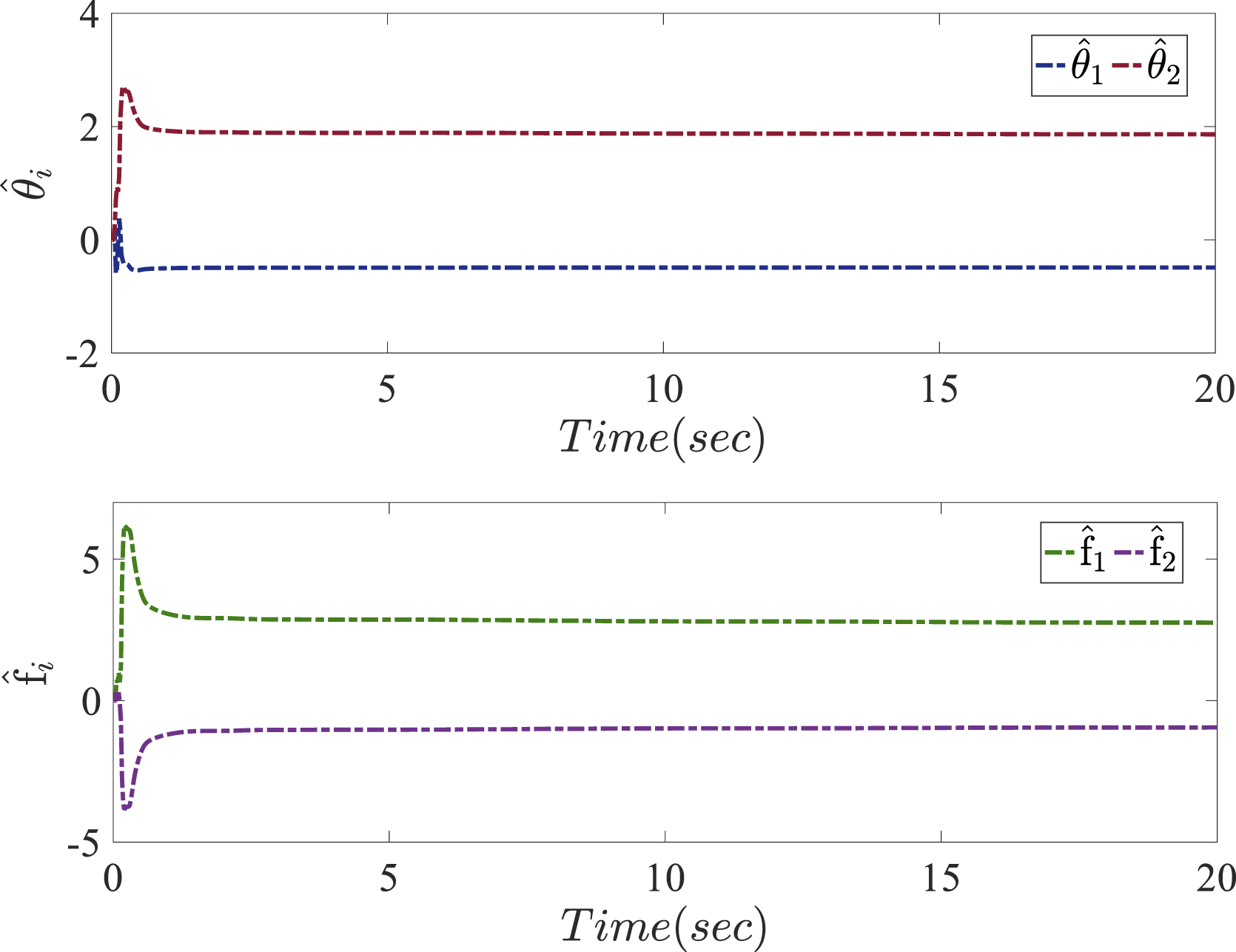
The parameters within the dynamic model (8) of the nonlinear IPC system cannot be accurately identified, including the friction coefficients and the viscous friction of the pendulum, denoted as f1 and f2, which vary over time. The approximation of these functions is calculated in accordance with the utilized design as follows:




Subsequently, the adaptive finite-time fractional-order sliding-mode controller is designated for the nonlinear state-constraint IPC system as expressed in equation (39):





The proposed control block diagram for the adaptive finite-time fractional-order sliding-mode control of a nonlinear state-constraint IPC system is illustrated in Figure 2. The proposed control block diagram for the adaptive finite-time fractional-order sliding-mode control of a nonlinear state-constraint IPC system.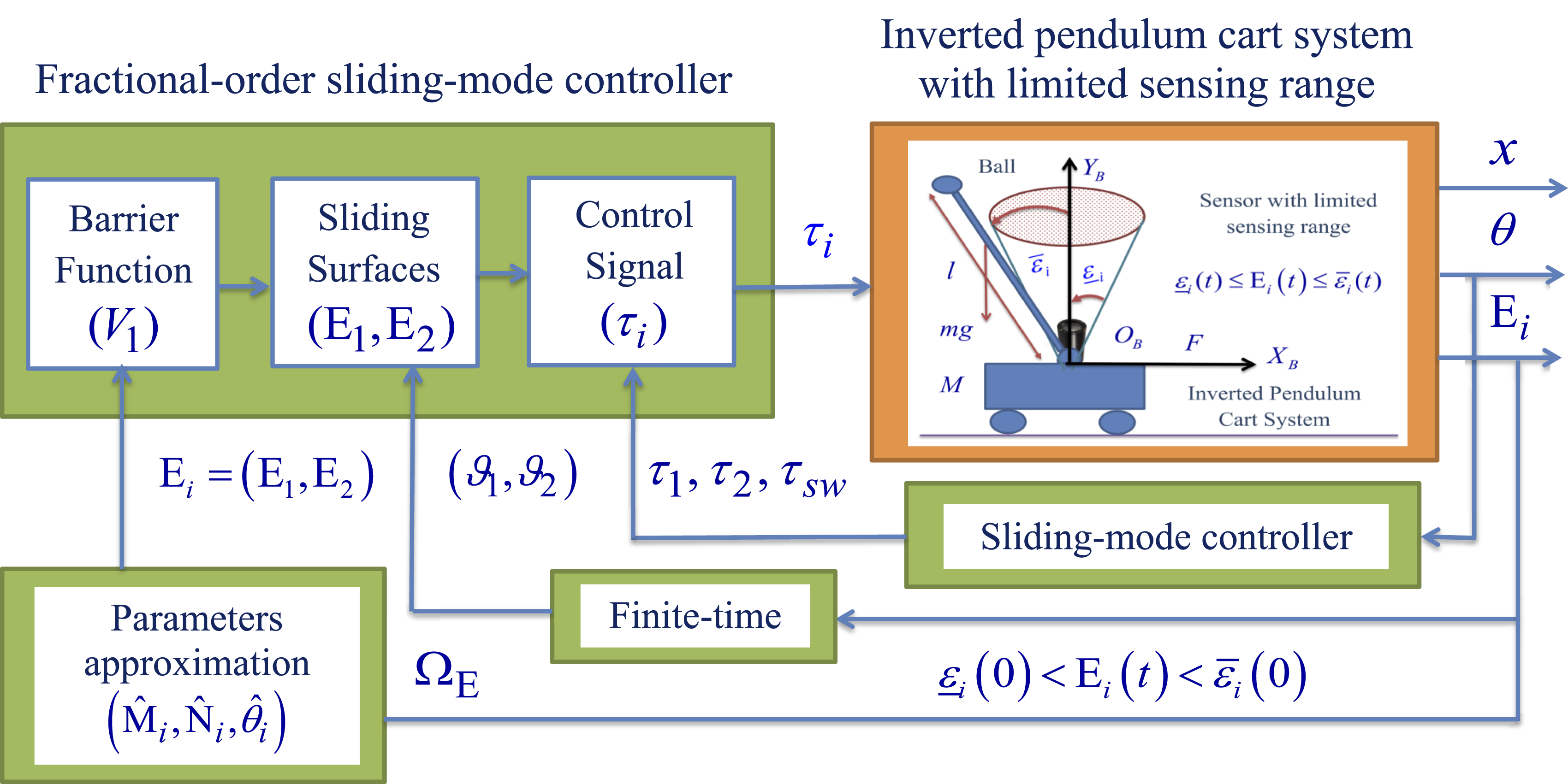
The fundamental findings regarding the proposed adaptive finite-time fractional-order sliding-mode control of a nonlinear state-constraint IPC system are summarized in the theorem below:
Consider a nonlinear IPC system with limited sensing range where the dynamic equations are represented by equation (1). This system operates under the fractional-order sliding surfaces derived in equation (15), alongside specifications and state restrictions imposed by the limited sensing range as indicated in equation (19). Additionally, the transformation of error variables is described in equation (22), while the proposed actual control is detailed in equation (39). This designed controller incorporates time-varying coefficients as specified in equation (31), subject to the conditions outlined in equation (32). Furthermore, the update rules for the multi-layer neural network are provided in equations (40), and (41), and the adaptive rule is presented in equation (42). These components collectively ensure that all signals within the closed-loop system remain bounded as t → ∞, and the stabilization error Ei(t) is characterized as finite-time semi-globally uniformly bounded (FTSGUUB), converging to a small vicinity around the origin.
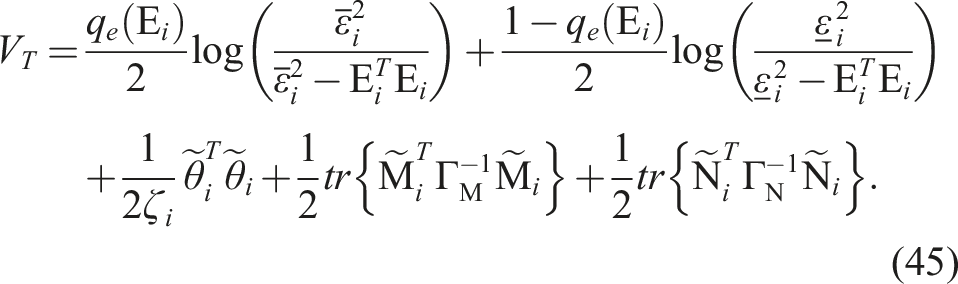
Consider the total Lyapunov function pertaining to the adaptive finite-time fractional-order sliding-mode control issue of the nonlinear IPC system:
The subsequent equation is established for the adaptive finite-time fractional-order sliding-mode control issue concerning nonlinear state-constraint IPC system:
Taking into account the assumption




As a result, the subsequent inequality is established in the adaptive finite-time fractional-order sliding-mode control issue of the nonlinear IPC system, as expressed in equation (52):

In this context,

Subsequently, the following inequality is established for the adaptive finite-time fractional-order sliding-mode control issue pertaining to the nonlinear IPC system as:

Consequently, the specified signals
If the parameter α meets the subsequent criterion, then the sliding surfaces E1 and E2 approach zero. This condition will be synonymous with the asymptotic stability of the closed-loop system.

According to the aforementioned equation, it can be deduced that

Given that the relationships defined by equation (60) are bounded, the following conclusion can be drawn:

Consequently, in light of equation (61) and in accordance with Barbalat’s lemma, it follows that
Simulation results
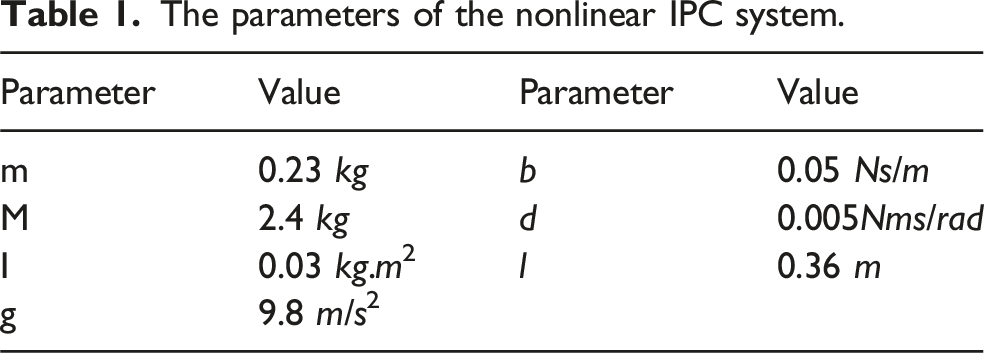
The parameters of the nonlinear IPC system.
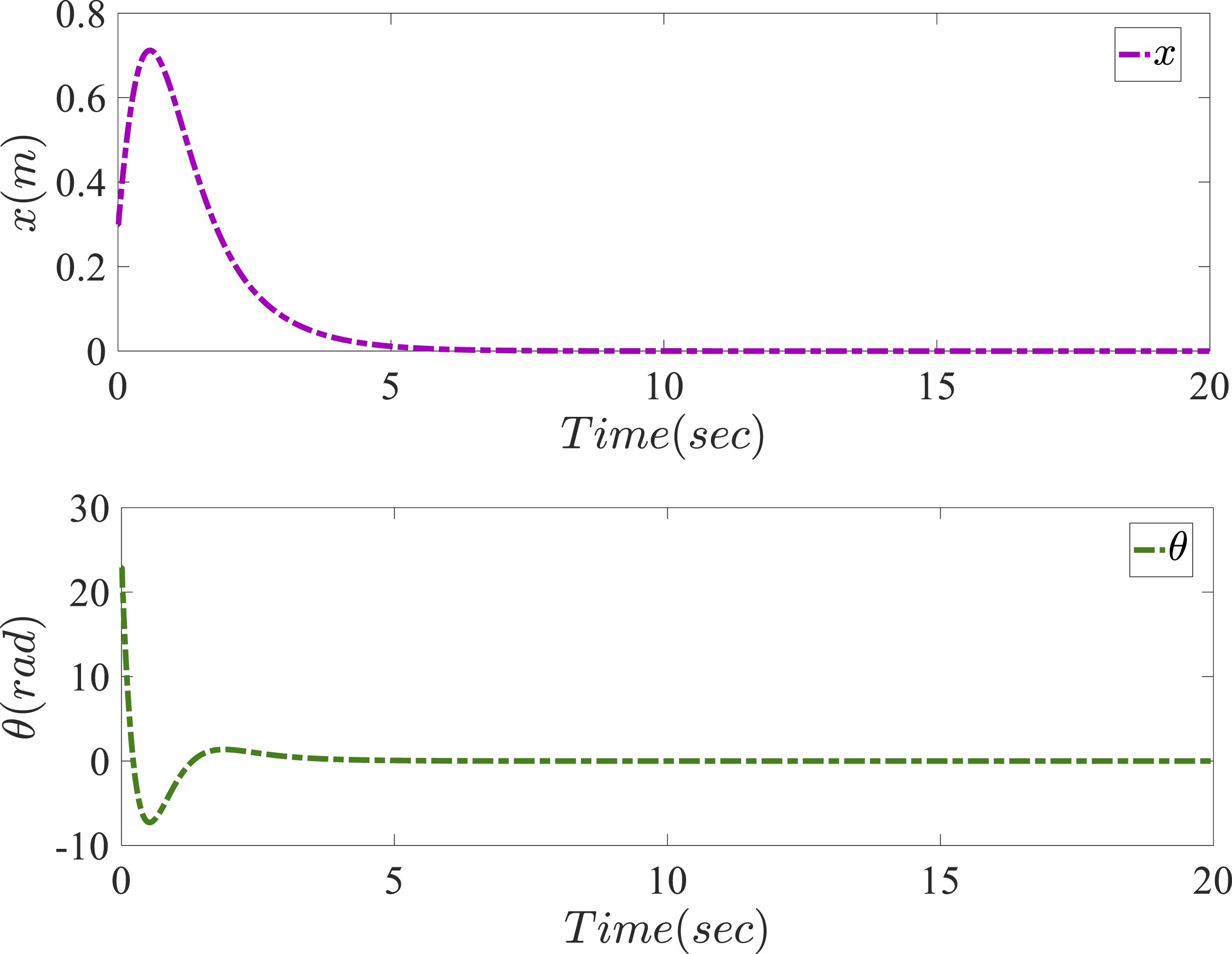
The trajectory of the pendulum’s angle
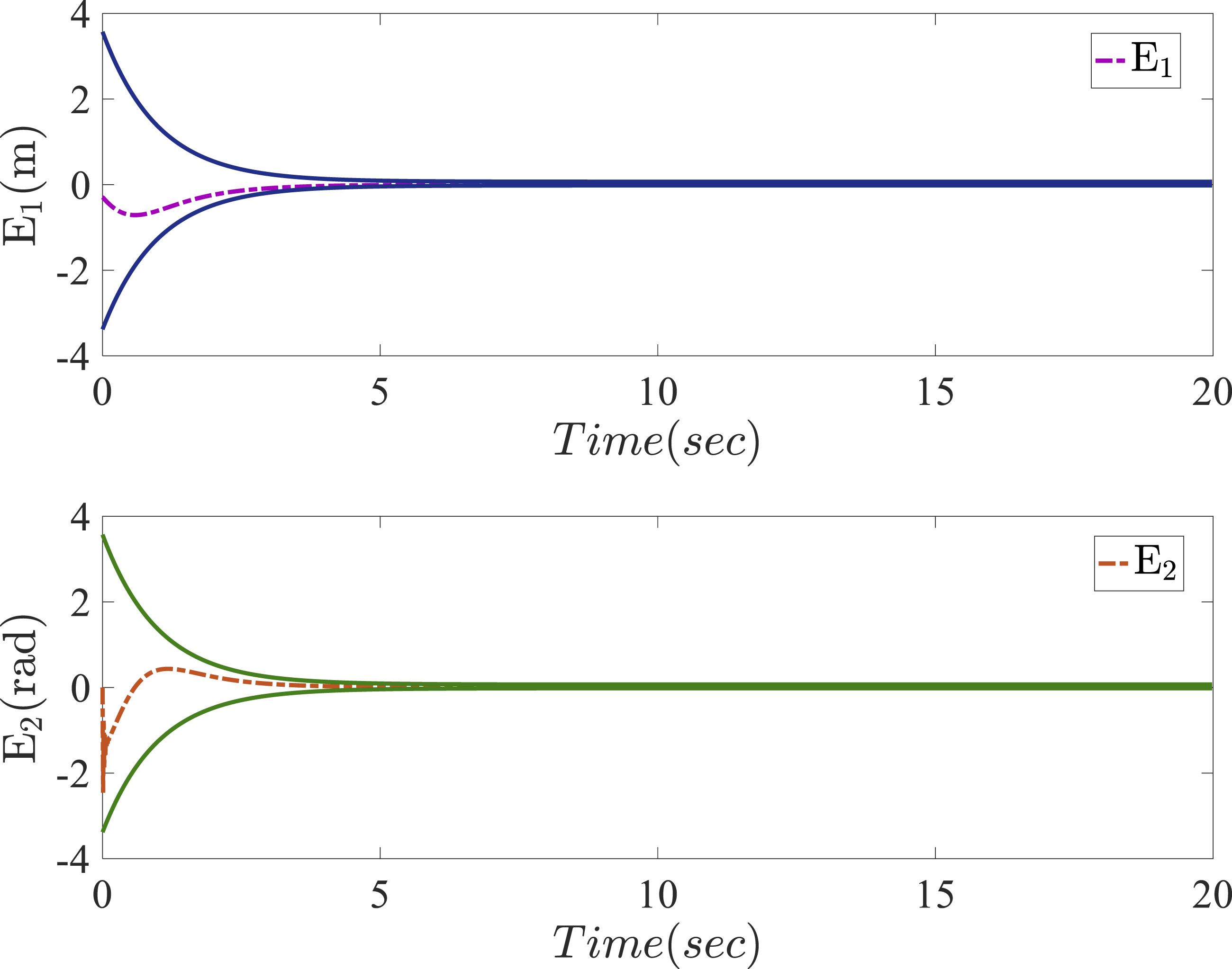
The output stabilization errors associated with the constrained fractional-order sliding-mode control problem (E1, E2).
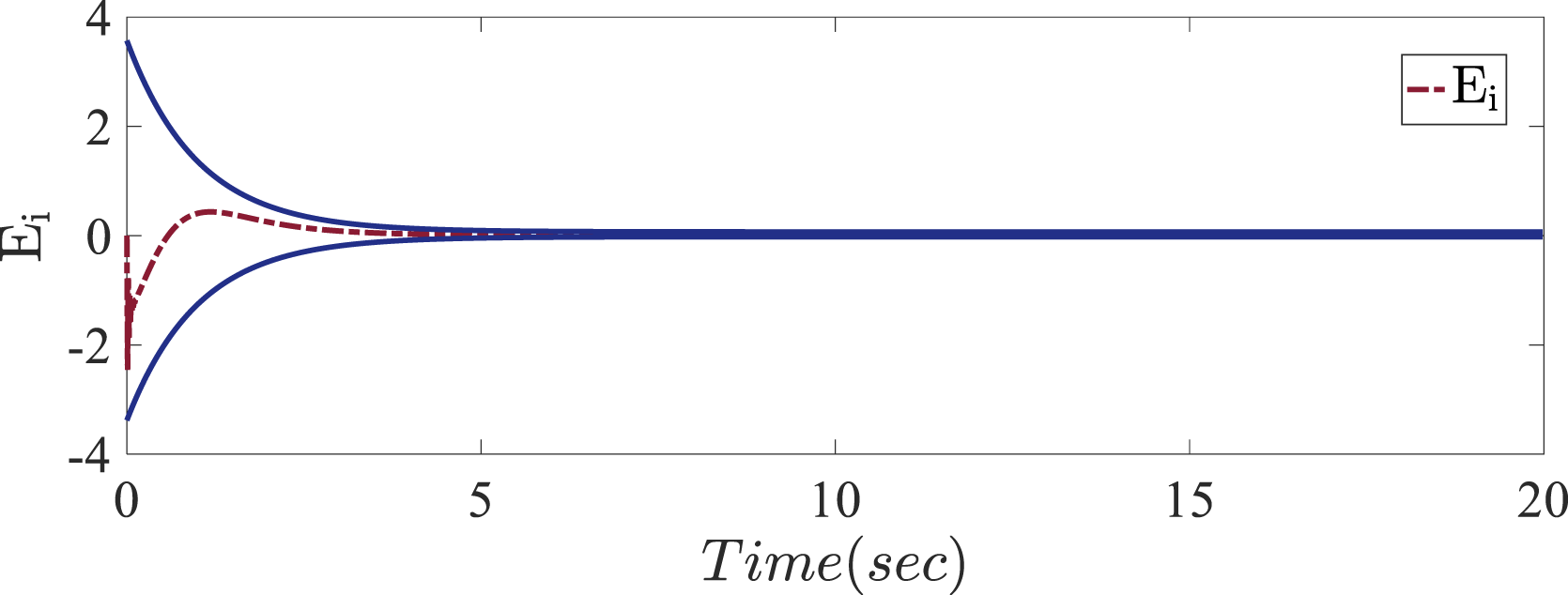
The fractional-order sliding surface for the nonlinear IPC system (E i ).
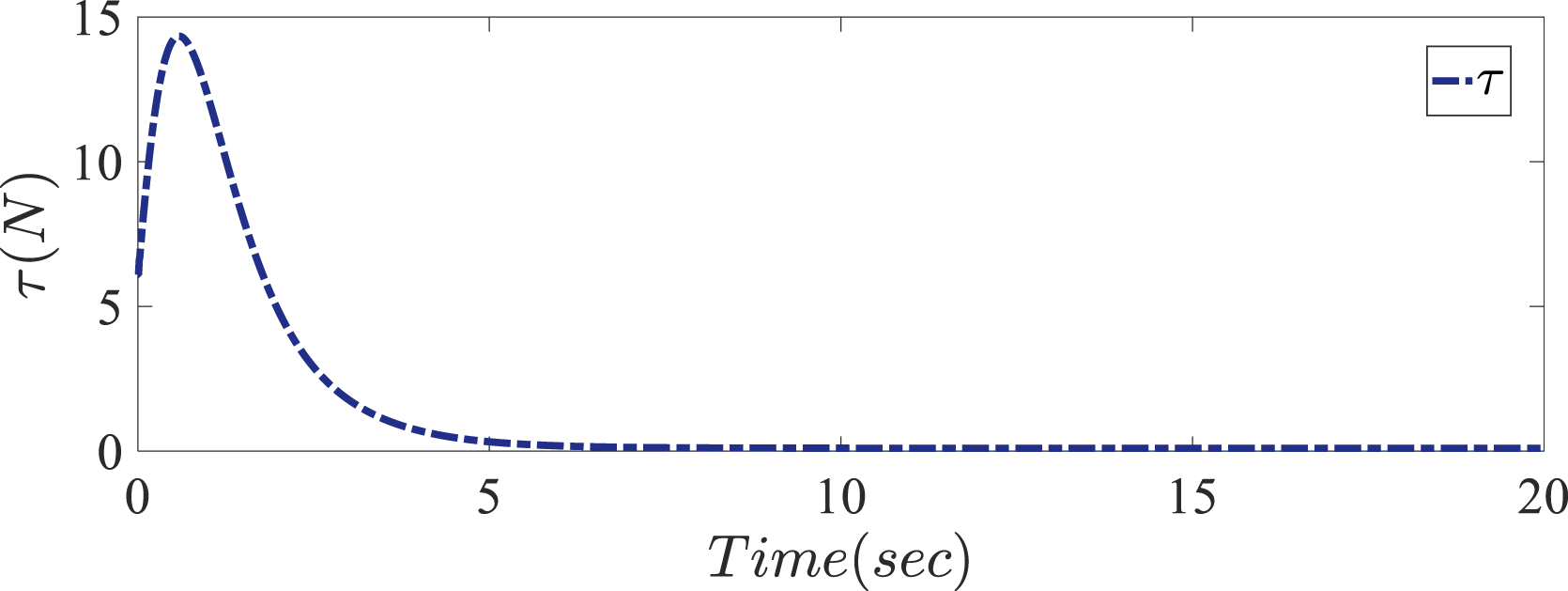
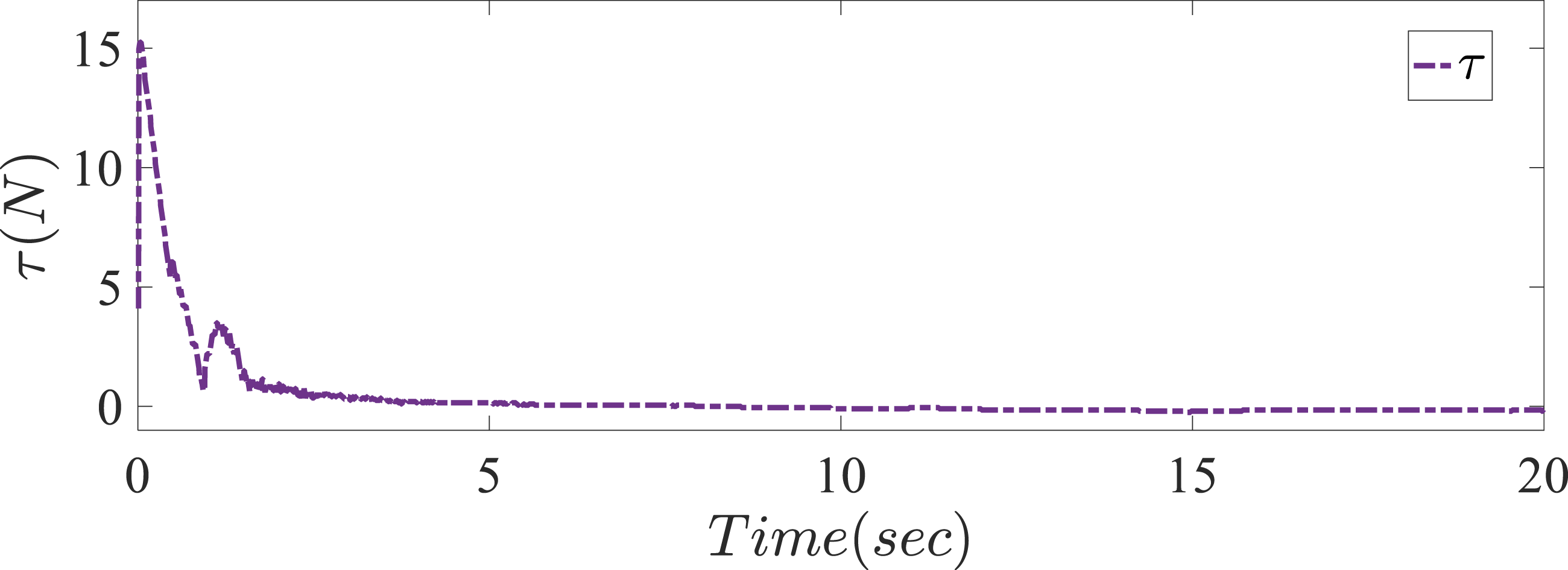
The actual control signal designed for the nonlinear IPC system (τ).
The Frobenius norm of the weight matrices approximations derived from the multi-layer neural network The Frobenius norm of the weight matrices approximations derived from the multi-layer neural network The adaptive neural approximation of the system parameters 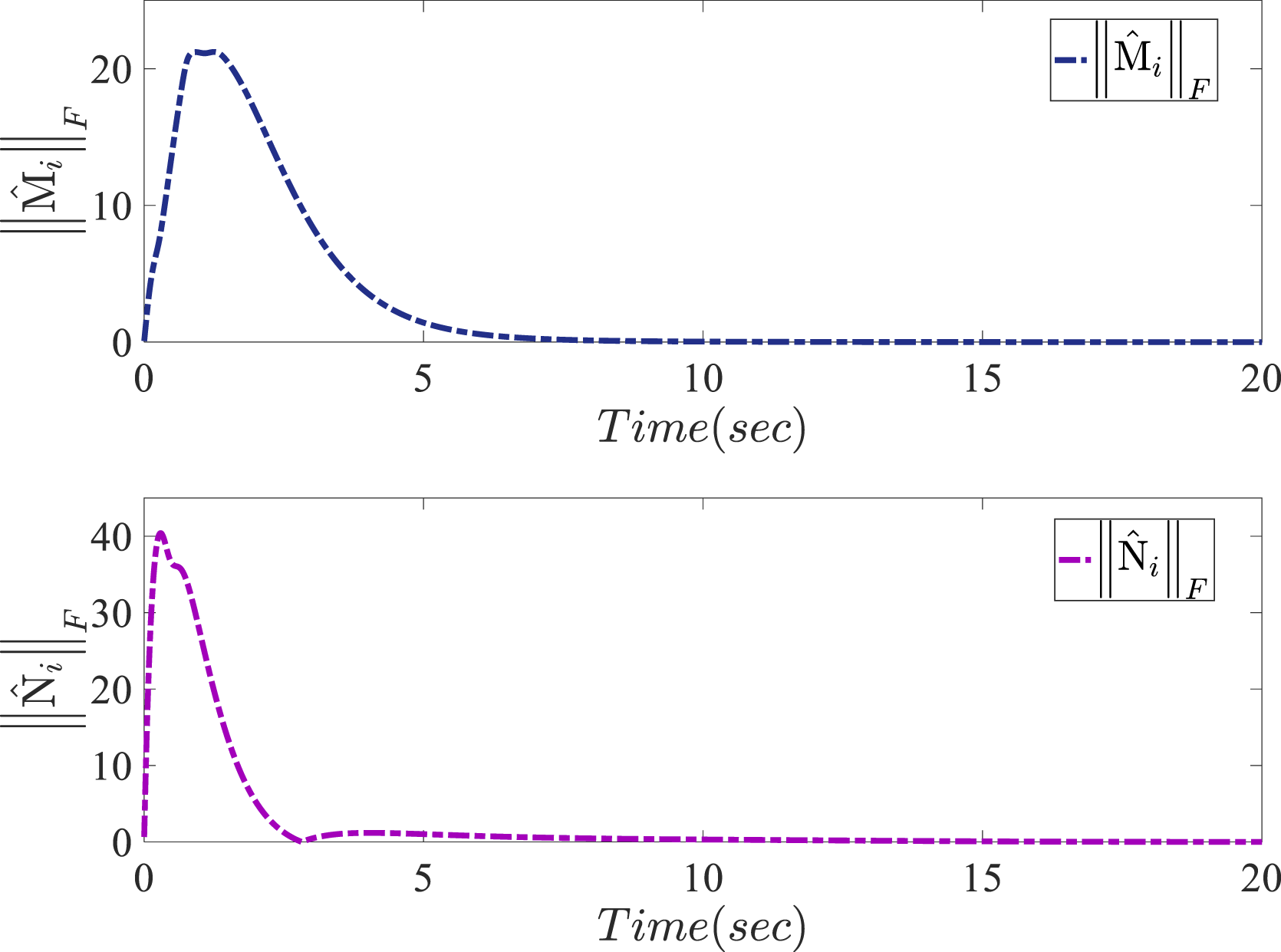
The parameters tuning for the proposed controller
The system’s performance in meeting the requirements is guaranteed by adjusting the controller parameters based on the simulation results, in order to address the limitations imposed by the limited sensing ranges. The method of trial and error is employed to ensure that the fundamental assumptions of the constrained adaptive finite-time fractional-order sliding-mode control are achieved in order to determine the primary state of nonlinear IPC systems. Furthermore, the mean square error optimization algorithm is employed to modify the coefficients of the controller, with the objective of reducing the control indices. The controlling coefficients that have been requested are designated as k1 = 30 and k2 = 15; the upper and lower limits of the time-dependent state constraints concerning the stabilization errors are determined as
The substantial adaptive coefficients can enhance control efficiency and reduce stabilization errors within the closed-loop system; however, they may result in unexpectedly large control signals. By modifying the coefficients of the constrained controller terms, the limits of stabilization errors can be fine-tuned, and by adjusting the gains of finite-time terms, both the transient responses and the convergence rate can be improved. In simulation experiments, initially, the controller coefficients are set to larger values for the control gains, and as the stabilization performance nears the constraints due to the sensors’ limited sensing range, the controller parameters must be appropriately confined by evaluating the simulation runs. Opting for a greater number of layers in MLNN enhances the capacity to learn more intricate algorithms; however, selecting a significant depth may result in the risk of overfitting and complications during training. Consequently, two hidden layers have been implemented in the simulations presented in this paper.
The outcomes of the comparison regarding the proposed controller
The comparative results regarding overshoot, settling time, the stabilization error E i , and the error criteria ISE, IAE, and ITAE for the distinct plans of nonlinear IPC system.
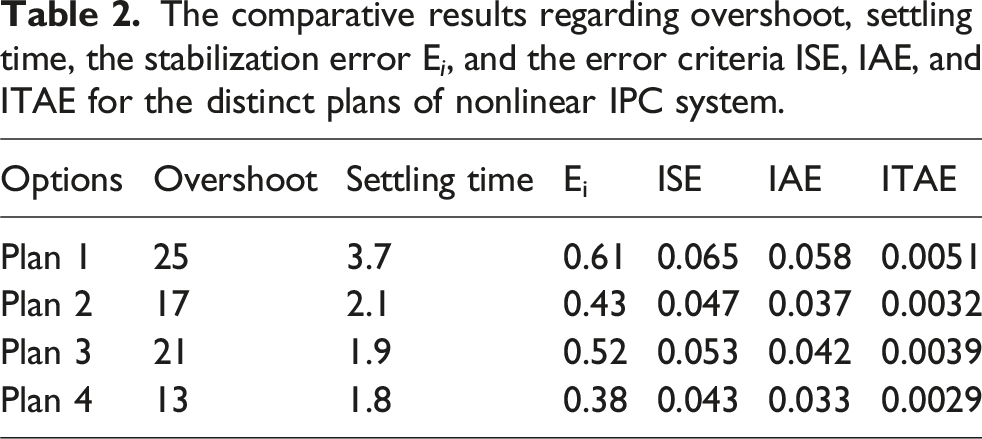
Upon evaluating the four plans, it becomes clear that the control strategy proposed in the first plan surpasses the established constrained limits, while the BLF-based design in the second plan complies with these constraints. The second plan demonstrates improved responses when compared to the first; however, it fails to manage the error bounds, leading to violations of the constraints. The third plan takes advantage of a finite-time structure that minimizes the settling time and improves the convergence rate. In the fourth plan, both the constrained errors resulting from the limitations of the sensor’s sensing capabilities stay within defined bounds, and the convergence rate of these errors is confined to a predetermined time. Consequently, the fourth plan achieves effective performance, guaranteeing compliance with the limited sensing range constraints that are crucial for system stabilization.
Importantly, the data presented in the tables indicates a notable decrease in errors and settling time in the fourth structure, suggesting that the nonlinear IPC system employing the constrained adaptive fractional-order sliding-mode controller surpasses the simulated outcomes. The findings from the simulation indicated that the proposed controller utilized in the fourth structure markedly enhances both transient and steady-state performance, while simultaneously decreasing the control effort relative to the controllers used in the first three structures. Notably, the fourth structure demonstrates significant improvements in settling time and maximum overshoot when compared to the other structures. The integration of constrained control with the adaptive fractional-order sliding-mode methodology results in a control system that effectively adheres to the specified constraints within the predefined boundaries.
After assessing the four suggested plans, simulations have been executed where the system parameters are treated as random variables with a 50% uncertainty. The presence of these uncertainties is expected to significantly influence the controller’s performance and may even exceed the stabilization errors beyond the established limits. The comparison between fractional-order sliding-mode surfaces and the corresponding control signals across these four distinct plans, all subjected to the same simulation conditions, is illustrated in Figures 9 and 10, respectively. As illustrated in these figures, even with the 50% uncertainty present in the parameters of nonlinear IPC systems, effective stabilization is achieved, ensuring that the limits of the constrained errors of the system remain intact in the forth plan. The fractional-order sliding surfaces for the nonlinear IPC system with 50% parameter uncertainties (E
i
) for four distinct plans. The actual control signals designed for the nonlinear IPC system with 50% parameter uncertainties (τ) for four distinct plans.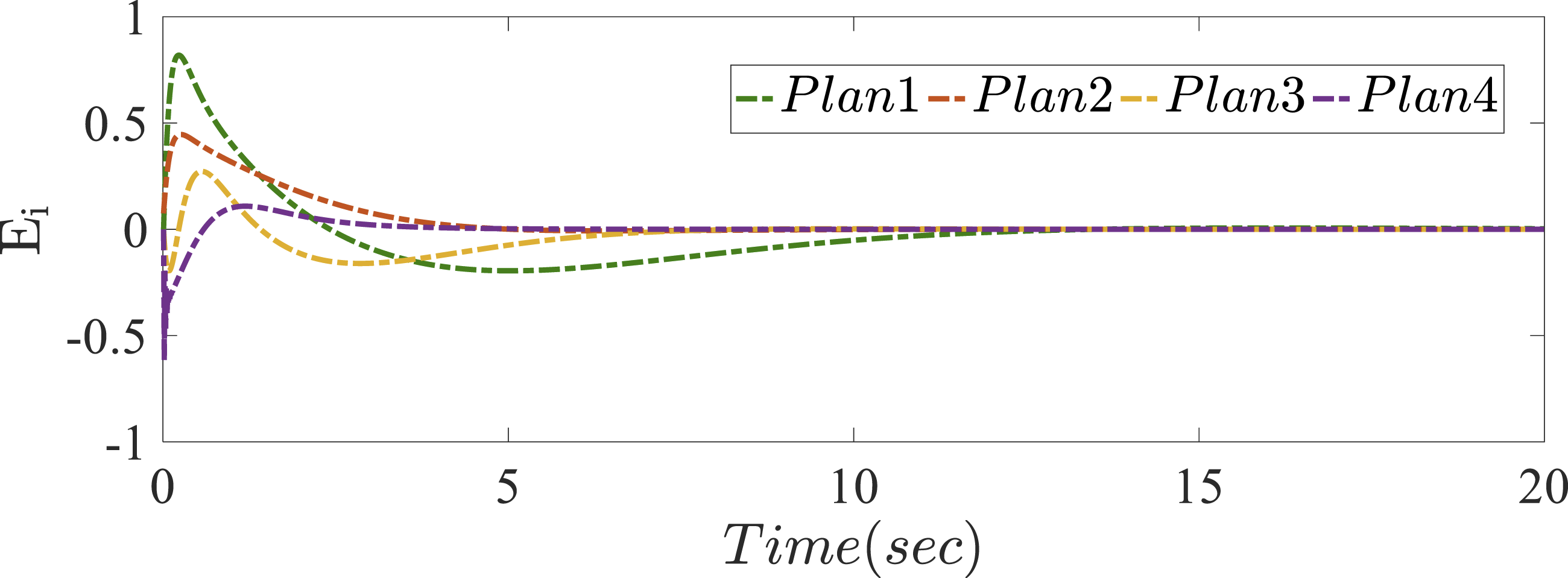
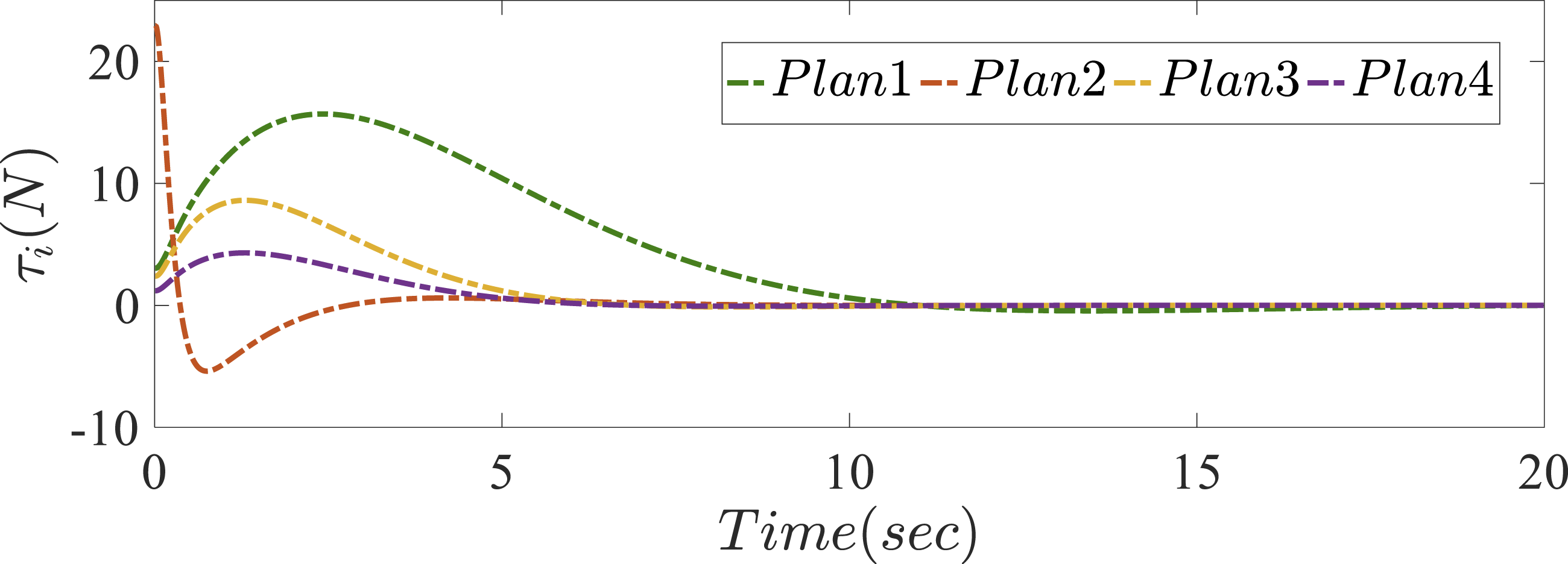
The control signal τ that has been designed signifies the force and torque inputs provided to the saturating ISP system thrusters, with their saturation nonlinearities represented in the subsequent manner:
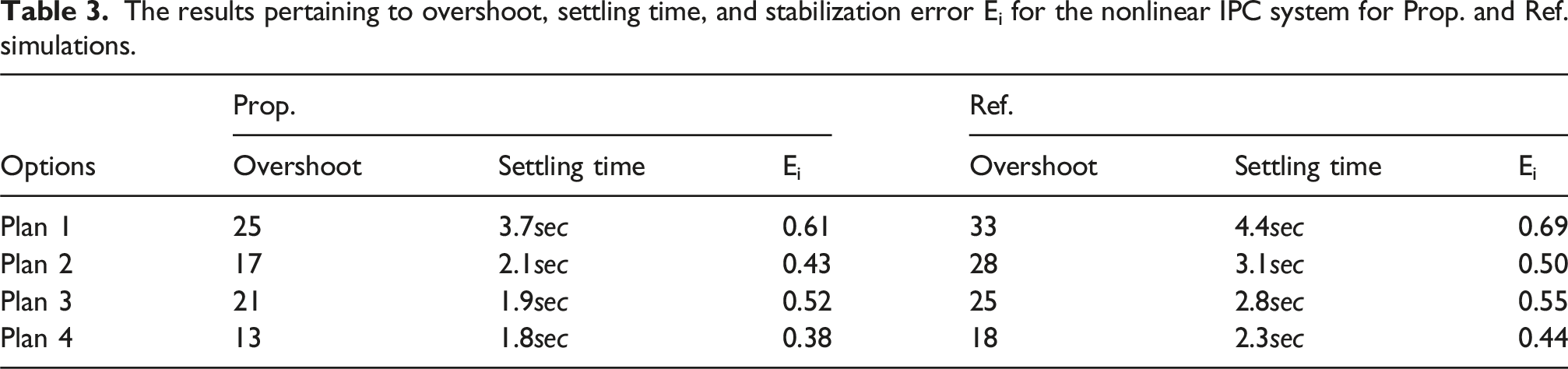
The results pertaining to overshoot, settling time, and stabilization error Ei for the nonlinear IPC system for Prop. and Ref. simulations.
Investigation and evaluation of the applied adaptive fractional-order sliding-mode controller for an IPC laboratory system
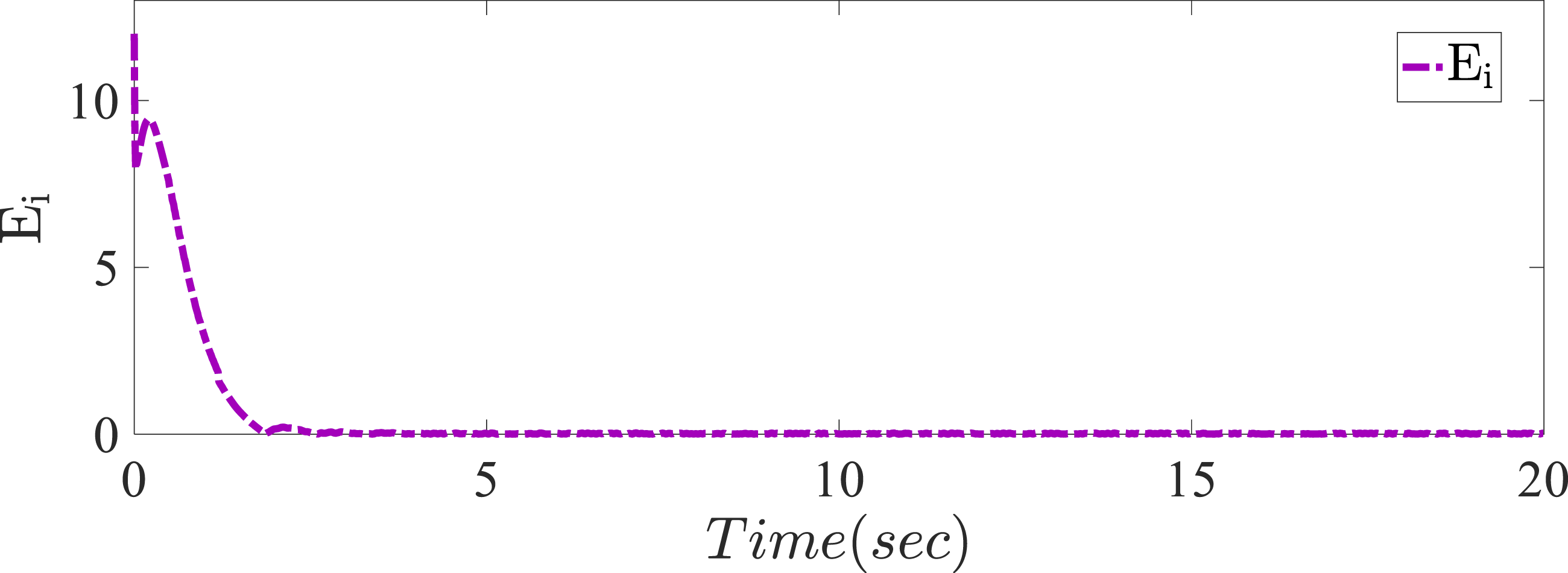
This section highlights the essential importance of real-time experimental validation for the control structures and methodologies that have been previously described. To achieve stabilization of the IPC system, a laboratory platform has been constructed using an MG995 servo motor. In the development of the IPC system platform, the initial focus was on the wheeled robot, which encompasses the robot chassis, a Plexiglas structure featuring a pendulum rod with integrated lighting, and aluminum components. To reduce the effective inertia between the inverted pendulum and cart system in this platform, the center of mass has been shifted closer to the axes, and lightweight polyethylene material has been utilized in the platform’s construction. Following the establishment of the mechanical components, the electronic components were introduced, which include an ESP32 microcontroller, a rotary encoder sensor, an MPU6050 gyroscope for the measurement of the pendulum angle, a robot wheel position encoder, and BLDC motors paired with an L298 motor driver. Following the simulation of the system’s dynamic model and the subsequent testing and evaluation of the designed controller using MATLAB software, the controller was transmitted to the ESP32 through the serial port. The Python software was additionally utilized online to save output data from the platform and the ESP32 microcontroller. By determining the position of the inverted pendulum, command signals can be generated to rotate the servos in either direction, ensuring that the angle remains aligned with the platform’s vertical axis. In the practical implementation, a boundary layer has been utilized to transform the designed control signal into PWM pulse, with the sign function being approximated through MLNN. Furthermore, taking into account the drives present in the system and the practical noise affecting the measured signals from the sensors, a Kalman filter has been incorporated into the system implementation. The configuration of the nonlinear IPC system with limited sensing range is depicted within the control laboratory subjected to simulation testing in Figure 11. Furthermore, Figures 12 and 13, respectively, depict the fractional-order sliding surface along with the actual control signals that have been developed for the nonlinear IPC system, which operates under a limited sensing range within the control laboratory. The configuration for the nonlinear IPC system with limited sensing range within the control laboratory. The fractional-order sliding surface for the nonlinear IPC system (E
i
) with limited sensing range within the control laboratory. The actual control signals designed for the nonlinear IPC system (τ) with limited sensing range within the control laboratory.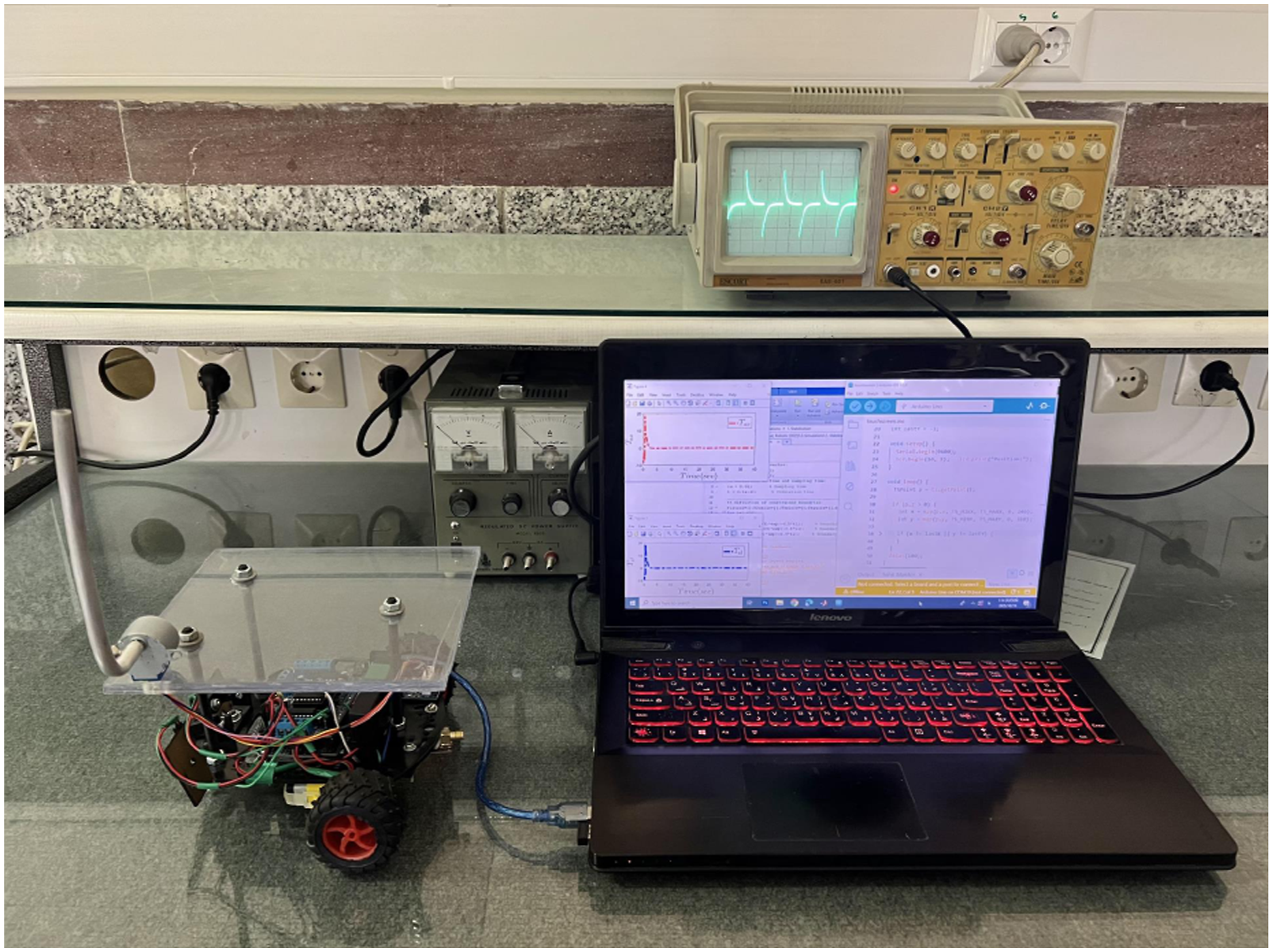
Conclusions
This paper presents an adaptive finite-time fractional-order sliding-mode control strategy for a state-constrained IPC system characterized by a limited sensing range, which encompasses a wide array of nonlinear systems. An asymmetric BLF-based controller design is employed to ensure that the output state constraints are not violated. To address the constrained control problem of the IPC system, an adaptive-neural structure is implemented to adjust both the unknown parameters and the unmodeled dynamics, while a finite-time approach is utilized to ensure the convergence of the system outputs, irrespective of the initial conditions. The proof of stability guarantees the FTSGUUB of the stabilization problem within the constrained control framework of the IPC nonlinear system. The results from simulations illustrate the effective performance of the controller, highlighting its advantages over adaptive finite-time fractional-order sliding-mode control in handling constraints. The nonlinear IPC system was developed and tested in a control laboratory setting to rigorously assess the performance of the controller. The findings of this study indicate the controller’s efficacy, and future research may explore the integration of alternative control methodologies to enhance the IPC system and facilitate comparative performance evaluations with existing control strategies.
Footnotes
Author contributions
[Amir Naderolasli] Conceptualization, Methodology, Formal analysis and investigation, Writing—original draft preparation, Writing—review and editing.
Funding
The authors declare no funding sources.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.