
Abstract
In virtually coupled multi-train systems, maintaining a stable and safe distance between adjacent trains is essential. However, input saturation and communication delays may adversely impact the operation of the coupled train system, making it challenging to ensure safe distances. To address these issues, an anti-saturation control algorithm is proposed to ensure the safe operation of the multi-train system under these adverse conditions. First, based on the dynamic model of multiple high-speed trains, a dynamic smoothing hyperbolic tangent saturation function was developed, with saturation limits varying according to train speed. Subsequently, a dynamic smoothing anti-saturation compensator was designed. Second, to account for communication delays between trains, a delay state prediction algorithm was established. Third, an adaptive sliding mode controller was formulated to address uncertainties in the system’s internal parameters. The anti-saturation compensator was then incorporated into the controller, resulting in the design of a delay-timeliness-eliminating anti-saturation robust controller. Using Lyapunov stability theory, this algorithm was proven to effectively mitigate the impact of input saturation and communication delays, ensuring the stable operation of the train system and maintaining safe distances between adjacent trains. Finally, the superiority of the proposed algorithm was validated through comparative simulations and experiments.
Introduction
With the rapid development of railway transportation systems, single high-speed trains can no longer meet the growing demand for passenger capacity. Arranging multiple high-speed trains in a virtually coupled formation can effectively increase train passenger capacity and optimize the utilization of railway space (He et al., 2025; Kelly et al., 2025; Zhang et al., 2023a). However, during the operation of multiple trains, the maximum traction and braking forces output by the internal motors of the trains are limited, making it difficult to achieve the ideal maximum values, which leads to input saturation in the train system (Rezaei et al., 2025; Sun et al., 2023; Zhang et al., 2024). If such input saturation is ignored, trains may operate at the maximum traction for prolonged periods, risking motor overload or damage. In addition, as trains operating in the virtual coupling mode lack a physical rigid connection, they must exchange their status information through communication-based interactions. The inherent delays in communication complicate the task of maintaining a safe distance between adjacent high-speed trains. Therefore, to ensure the safe operation of virtually coupled multi-train systems, robust anti-saturation control algorithms that address the challenges posed by input saturation and communication delays must be designed (Abbasi and Marquez, 2025; Shahbazzadeh et al., 2021; Shen et al., 2022).
For target tracking control of high-speed trains, Sliding Mode Control (SMC) has been extensively applied in train control systems due to its excellent tracking performance. For instance, a uniform integral sliding mode controller was designed using generalized homogeneity (Polyakov, 2024), while another integral sliding mode controller was developed specifically for stable target tracking (Zhang et al., 2019). To increase the convergence speed of state errors on the sliding surface under SMC, other researchers have proposed terminal SMC (TSMC). Yu et al. (2024) proposed a novel TSMC method to achieve high motor performance. To address the singularity phenomena in TSMC, the non-singular TSMC (NTSMC) has been proposed. Yang et al. (2024) combined NTSMC and direct instantaneous torque control into a hybrid strategy that enhances the dynamic responses of motors. However, these control algorithms cannot easily adapt to uncertainties in the internal system parameters. This limitation has been addressed by adaptive TSMC (ATSMC), which improves the involved performance and robustness (Geronel and Bueno, 2025). Çavuş and Aktaş (2024) proposed a more robust ATSMC that improves the control performance of induction motors. Although these SMC algorithms offer robust control performance, they cannot resolve the challenges associated with collaborative control in virtually coupled train sets. In particular, efficient and practical solutions to input saturation in multi-train operations are currently lacking.
Currently, input saturation is typically addressed by limiting the control inputs with a saturation function, incorporating input saturation into the control algorithm design, or correcting saturation deviations using anti-saturation compensators. Zhu et al. (2023) directly applied a saturation function that manages input saturation during high-speed train operations. Cai and Huang (2024) designed a similar function to suppress input saturation in heavy-haul trains. Although both approaches effectively limit the input saturation, they are prone to abrupt changes when the control inputs are restricted. Wang et al. (2021) introduced a novel anti-saturation control algorithm based on the backstepping method, which explicitly incorporates input saturation into the controller design. However, the application of this method is significantly complex. In contrast, He et al. (2024) addressed input saturation by developing an unbounded anti-saturation compensator, while Shen et al. (2025) designed an auxiliary anti-saturation algorithm integrated directly into the control system. These schemes, designed as auxiliary components to the main controller, provide relatively simple and effective solutions. Nevertheless, they generally assume fixed saturation limits, whereas in multi-train systems, the actual control input should adapt with train speed.
Virtual coupling target tracking control has also been extensively researched (Sahar and Su, 2022). For instance, Zhen et al. (2022) introduced a finite-time position-and-attitude-tracking control algorithm based on artificial potential fields and virtual coupling, which detects underwater robot-motion postures and seabed terrains. Cai et al. (2020) developed a distributed model predictive control scheme for trajectory tracking and obstacle avoidance in multiple drone coupling. However, neither Zhen et al. (2022) nor Cai et al. (2020) investigated the problem in the context of multiple trains. To achieve safe distance tracking between adjacent trains under virtual coupling, Zhu et al. (2024) proposed a distributed model predictive control method to address the coordinated control problem of virtually coupled high-speed trains. Similarly, Zhang et al. (2023b) designed a distributed optimization control based on the virtual coupling of multiple trains to improve the efficiency of a railway transportation system. Bai et al. (2019) developed a distributed control law that ensures the expected displacement and velocity tracking while maintaining appropriate distances between adjacent trains. However, none of these studies considered the critical impact of communication delays during interactions among multiple virtually coupled trains.
To achieve efficient target tracking for multiple high-speed trains operating in the virtual coupling mode while addressing input saturation and communication delays, this study makes the following contributions: (1) A new type of Dynamic Smoothing Hyperbolic Tangent Saturation Function (DSHTSF) has been designed to solve the problem of control system overload caused by fixed and abrupt saturation limits in traditional saturation functions. Furthermore, a Dynamic Smoothing Anti-Saturation Compensator (DSAsC) has been proposed to quickly compensate for the deviation between actual and ideal control inputs, effectively addressing the input saturation problem of trains. (2) A Delay State Prediction (DSP) algorithm has been designed to mitigate the communication delay problem during information exchange between trains. The state information of the leader train under communication delay was reasonably predicted, and the control target was updated to track the state information of the leader train under information delay by the follower trains. (3) An Eliminate Delay Timeliness Anti-saturation Robust Controller (EDT-AsRC) has been designed to address the issues of input saturation and communication delay during the operation of virtually coupled high-speed trains. The speed of each follower train precisely tracked the speed of the leader train to ensure that the distance between adjacent high-speed trains remained stable at a safe distance.
Dynamic model of a virtually coupled train set
Consider a virtually coupled high-speed CRH3 train system comprising a leader train and
Letting


Considering input saturation, (2) is transformed as

As the operating route of a high-speed train set is almost fixed, the carriages operate along the route under nearly identical environmental conditions. Consequently, the environmental factors exert approximately equivalent impacts on each carriage. To simplify the control algorithm and enhance its engineering applicability, the model represented by (4) treats each train as a particle and assumes identical resistance coefficients for all carriages.
Anti-input saturation control algorithm
This section first designs a DSAsC to compensate for the deviation between the ideal and actual control inputs, thereby resolving input saturation in the train control system. It then designs an EDT-AsRC to mitigate the impact of communication delays on the stable operation of multiple trains, ensuring that the spacing between adjacent trains remains steadily at a safe distance.
Design of the DSAsC
When the input saturates during train operation, the actual system input can be expressed as

When
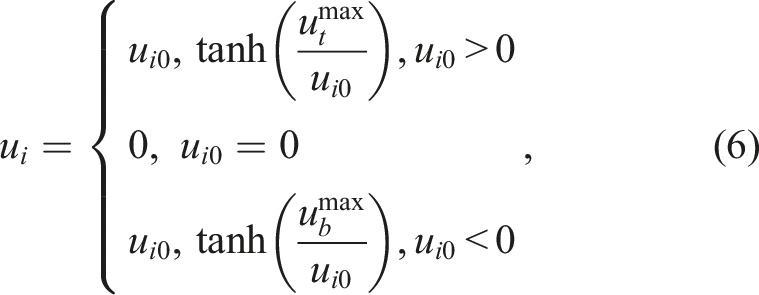

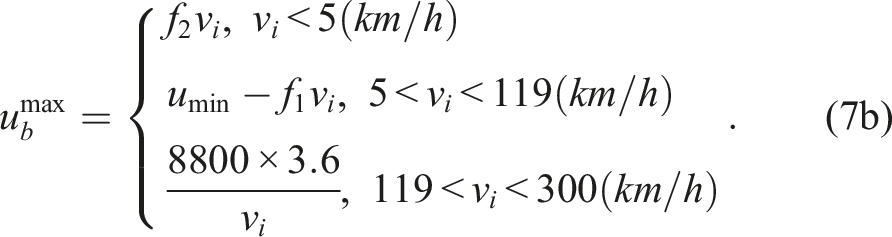
In formulas (7a) and (7b),
The simulation example shown in Figure 1 can represent the saturation function (5) and the proposed DSHTSF (6). To reflect the smoothness limiting performance of DSHTSF, Comparison curves of saturation function characteristics: (a) traditional saturation function characteristic curve and (b) DSHTSF characteristic curve.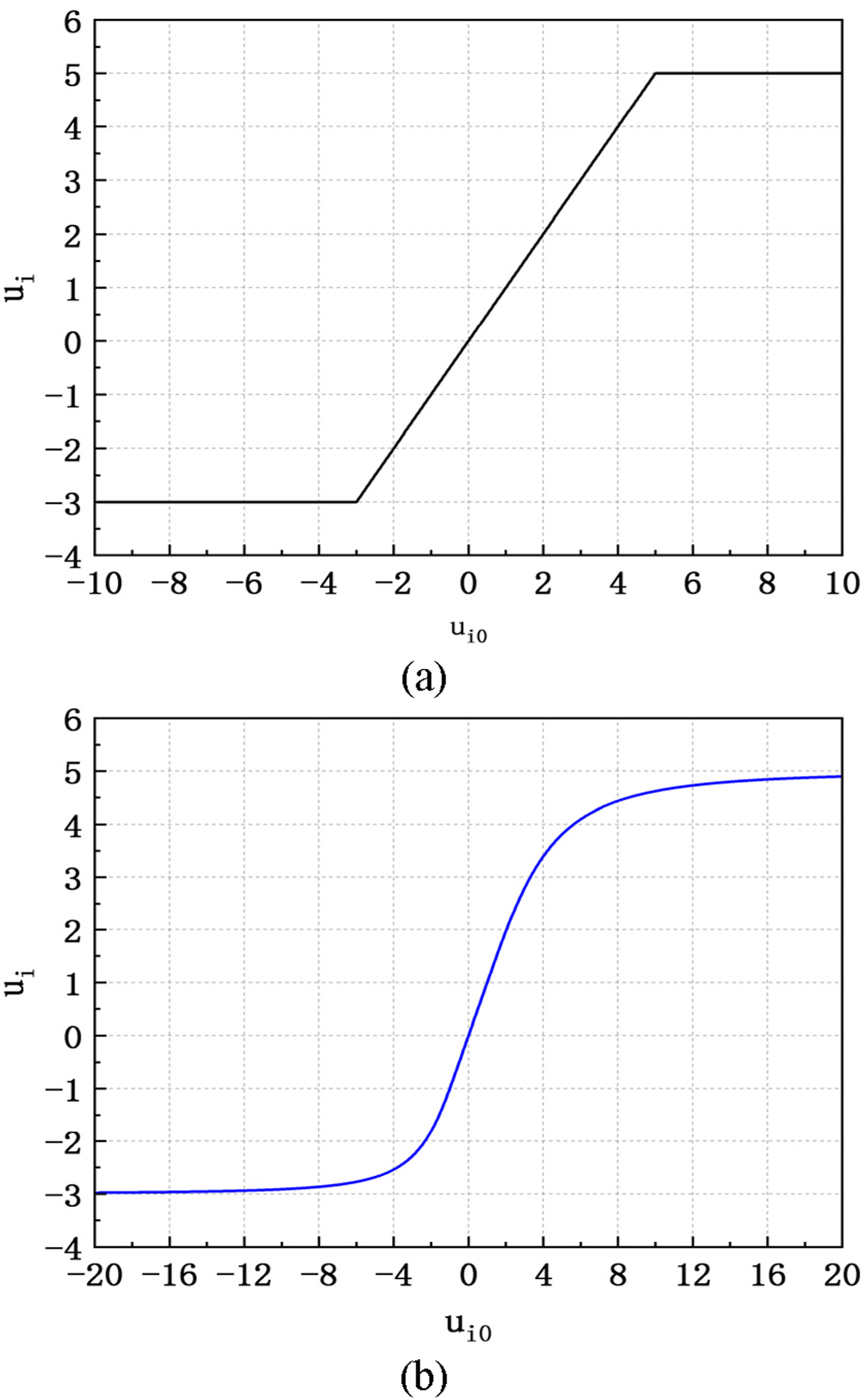
For the CRH3 type high-speed train, when the train speed is lower than 119 km/h, the train outputs quasi-constant torque. As the speed increases, the acceleration will gradually decrease. When the speed reaches 119 km/h, the power reaches the maximum of 8800 kW (Hou et al., 2019).
The relationship between traction/braking force

During actual train operation, due to complex environmental and road conditions, the train’s internal motor struggles to deliver its maximum torque. Compared with the traditional saturation function (5), (7a) and (7b) ensure that the train can provide appropriate driving force and braking force at different speeds, which is more in line with the actual operation of the train.
If the controller design is directly based on the DSHTSF represented by (6), the actual control input is smoothed only by the smooth boundedness of the hyperbolic tangent function. Therefore, to compensate for and correct the deviation between Anti-saturation structure diagram of the train system.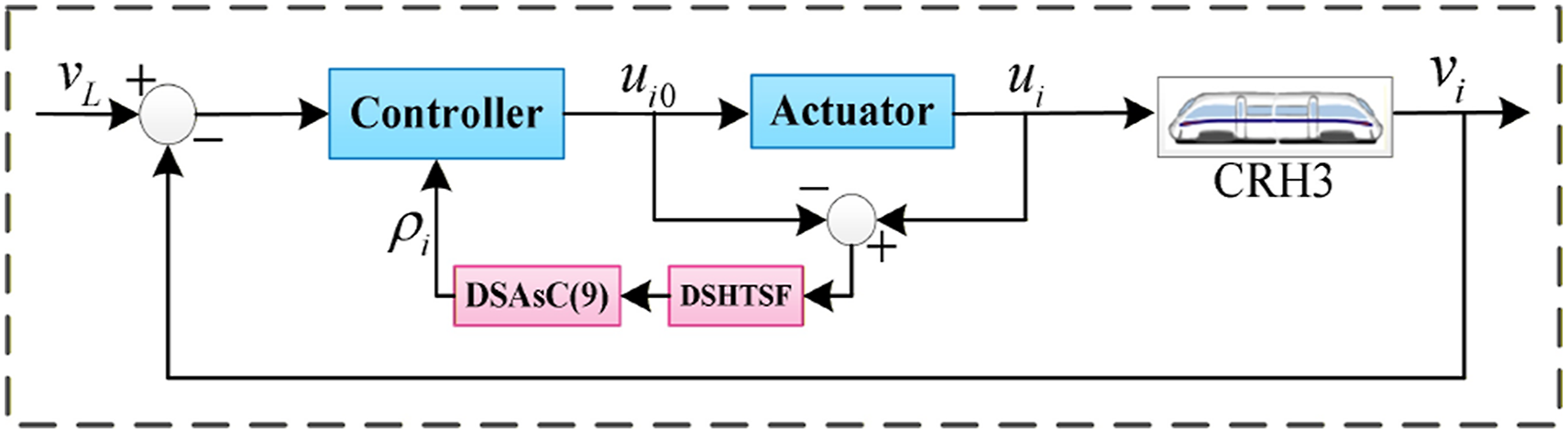
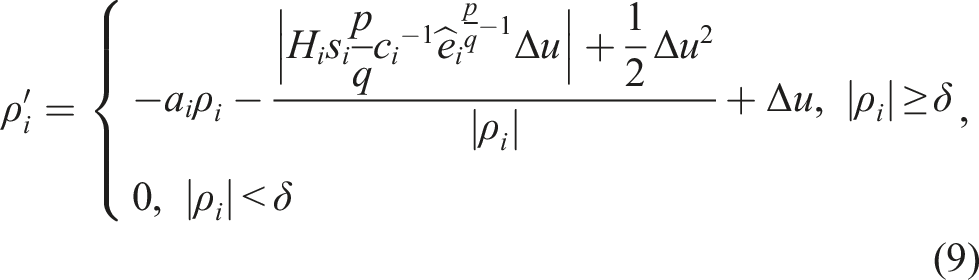
The DSAsC operates when the actual control input reaches saturation and compensates until
Controller design
The control objectives of multiple high-speed trains under input saturation conditions are defined as follows: (a) Adjacent high-speed trains must always maintain a safe distance: (b) The speed of each train must track the speed of the leader train:


Due to the communication delay Diagram of the high-speed train-tracking structure with communication delay.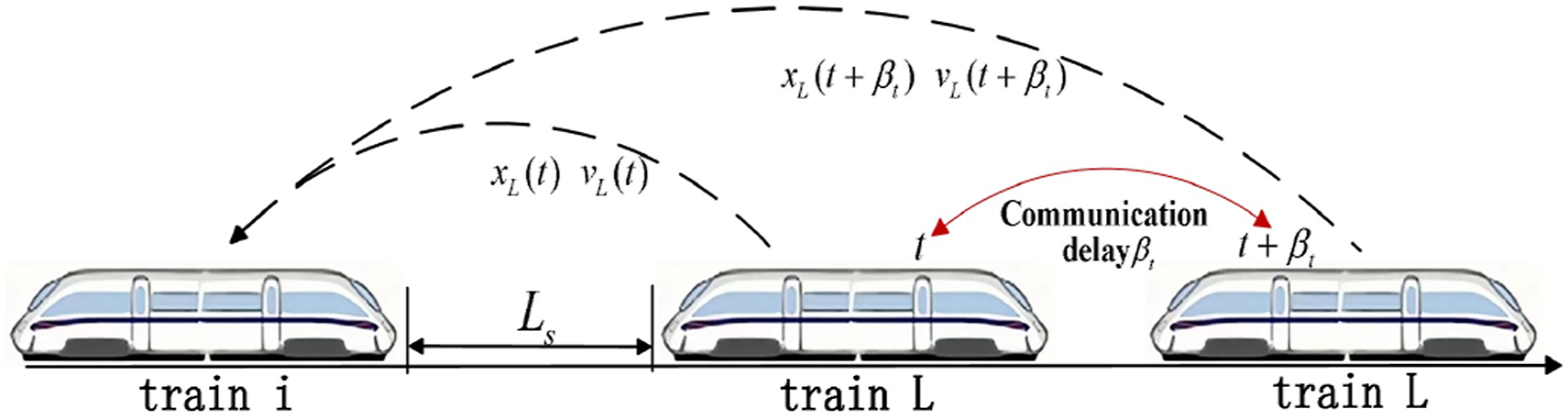
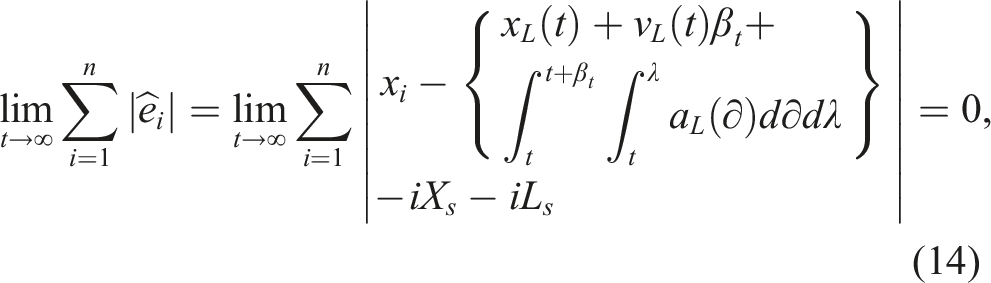
To eliminate the effect of delay, the following delay state prediction formula (DSP), namely, (12) and (13), is designed to predict the state information of the leader train


Substituting (12) and (13) into (10) and (11) and considering the effects of input saturation and communication delay, the control objectives of the train system are updated as

For the multi-train model (4), let us define
The nonsingular terminal sliding surface is designed as

The EDT-AsRC is defined as
The adaptive laws of the parameter estimates are given by (18a)–(20b):






Consider the virtually coupled model (4) and let
To prove Theorem 1, we define the following:
Select a positive-definite Lyapunov function as

Taking the derivative of the positive-definite Lyapunov function, we obtain

Then, (24) is re-expressed as
Substituting (15) into (25) yields
Substituting (18a)–(20b) into (30) further yields

The proof of Theorem 1 is completed.
This proof indicates that under the control law (17), when
Finite time


Further transform (33) into

Since


Integrate both sides of (37):




Since
The control strategy of the virtually coupled train set is illustrated in Figure 4. Illustration of the high-speed train control strategy.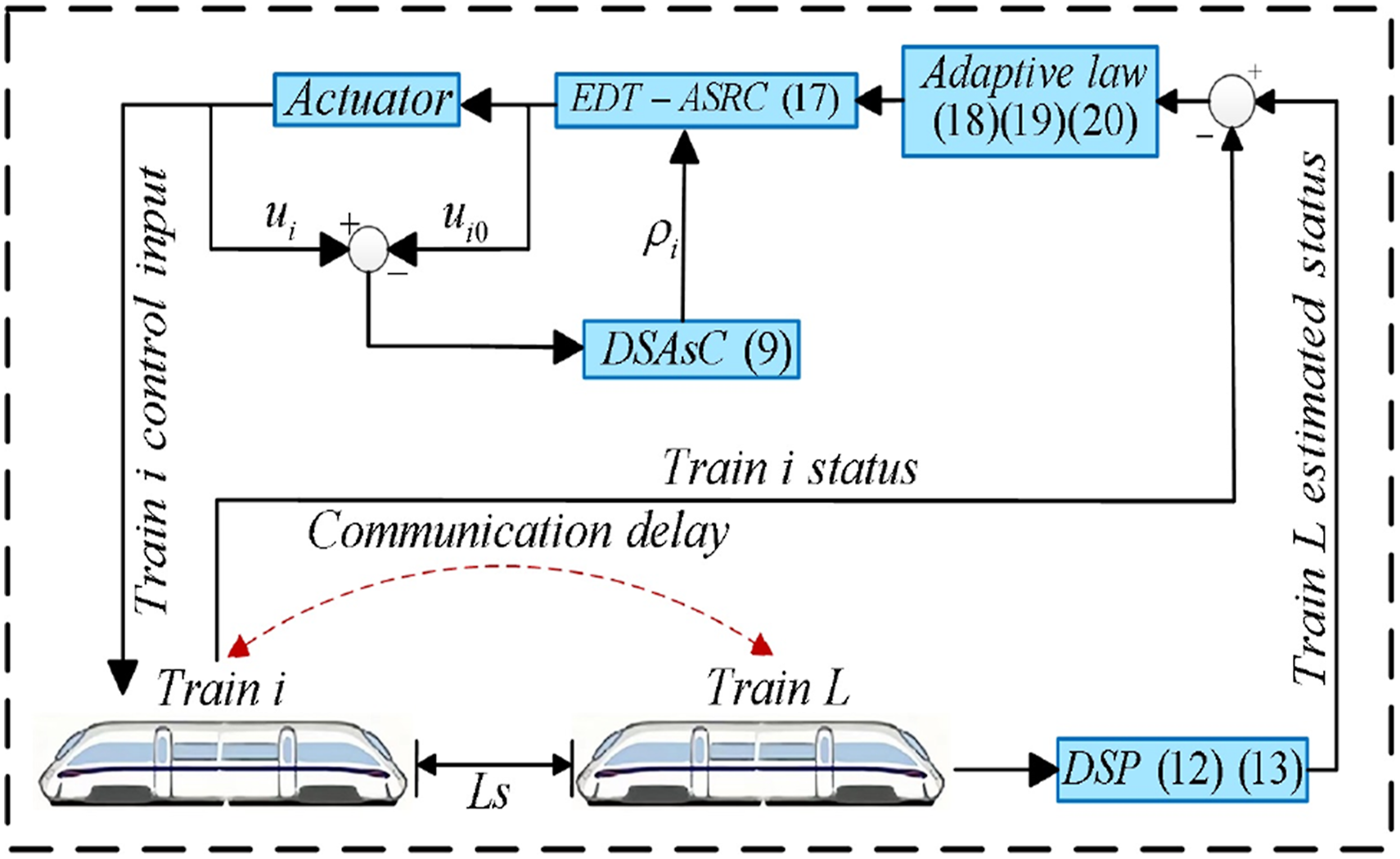
Simulation verification and experimental analysis
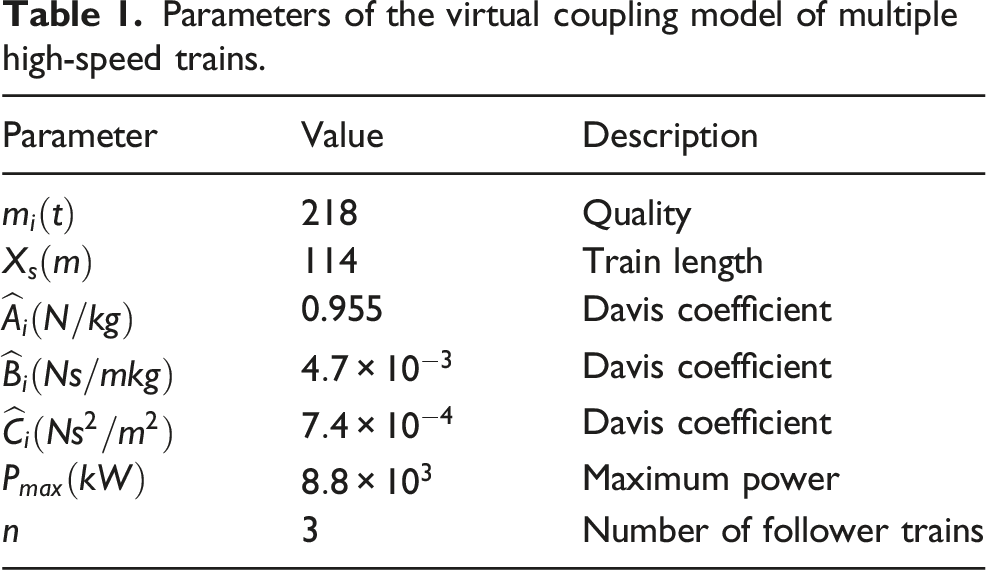
This section outlines a virtually coupled train system comprising four high-speed trains, including the leader train L. The leader train operates along a predefined running curve under ideal conditions, while the three follower trains track the leader train’s motion using the proposed control algorithm. First, the experimental parameters are given. Then, simulation verification is carried out using MATLAB. Finally, semi-physical experiments are conducted on the RT-Lab platform.
Experimental parameters
Parameters of the virtual coupling model of multiple high-speed trains.
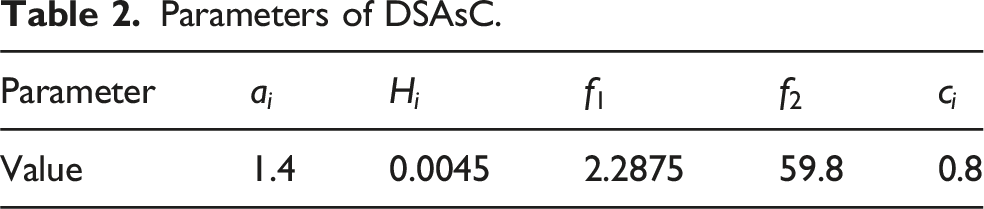
Parameters of DSAsC.
Simulation validation
This subsection presents the simulation validation results under two scenarios. First, the performances of the proposed EDT-AsRC and the traditional anti-saturation cooperative controller (ACC) (Xi et al., 2023) were compared under input saturation conditions. Second, the performances of the EDT-AsRC algorithm and the traditional distributed adaptive coordination control (DACC) algorithm (Wang et al., 2024) were compared under both input saturation and communication delay conditions.
Simulation comparison under Input saturation conditions
As depicted in Figure 5, after input saturation occurred during the operation of the high-speed train system, the control input under the traditional ACC exhibited abrupt jumps. Under these circumstances, the motor of the train control system operated at maximum traction force over an extended period, increasing the risk of motor overload or even damage. In contrast, by feeding back its compensation factor to the controller, the DSAsC smoothly constrains the control input of the EDT-ASRC within the saturation limits, thereby effectively resolving the input saturation phenomenon. Ideal control input curves of the high-speed train systems controlled by the ACC and EDT-AsRC algorithms.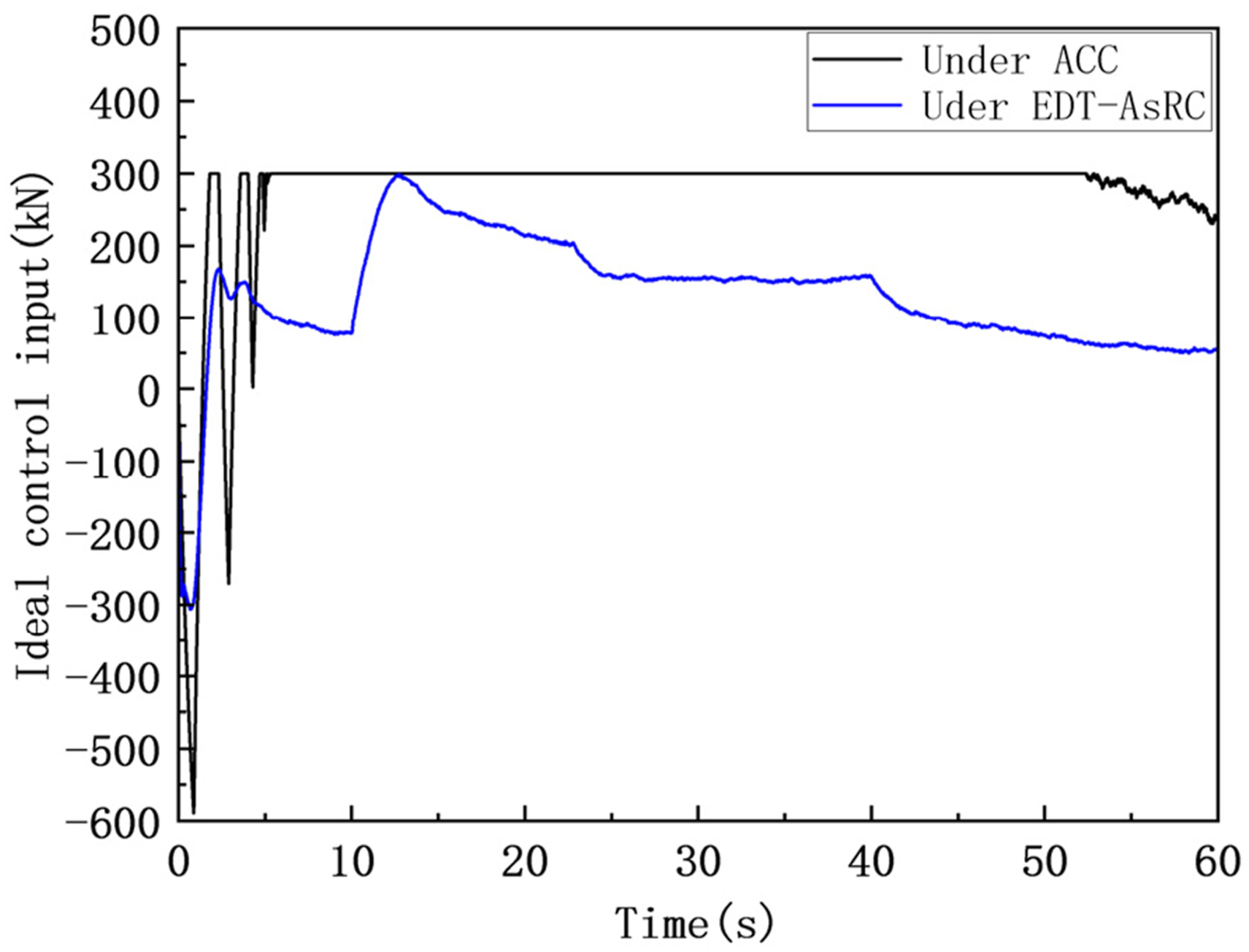
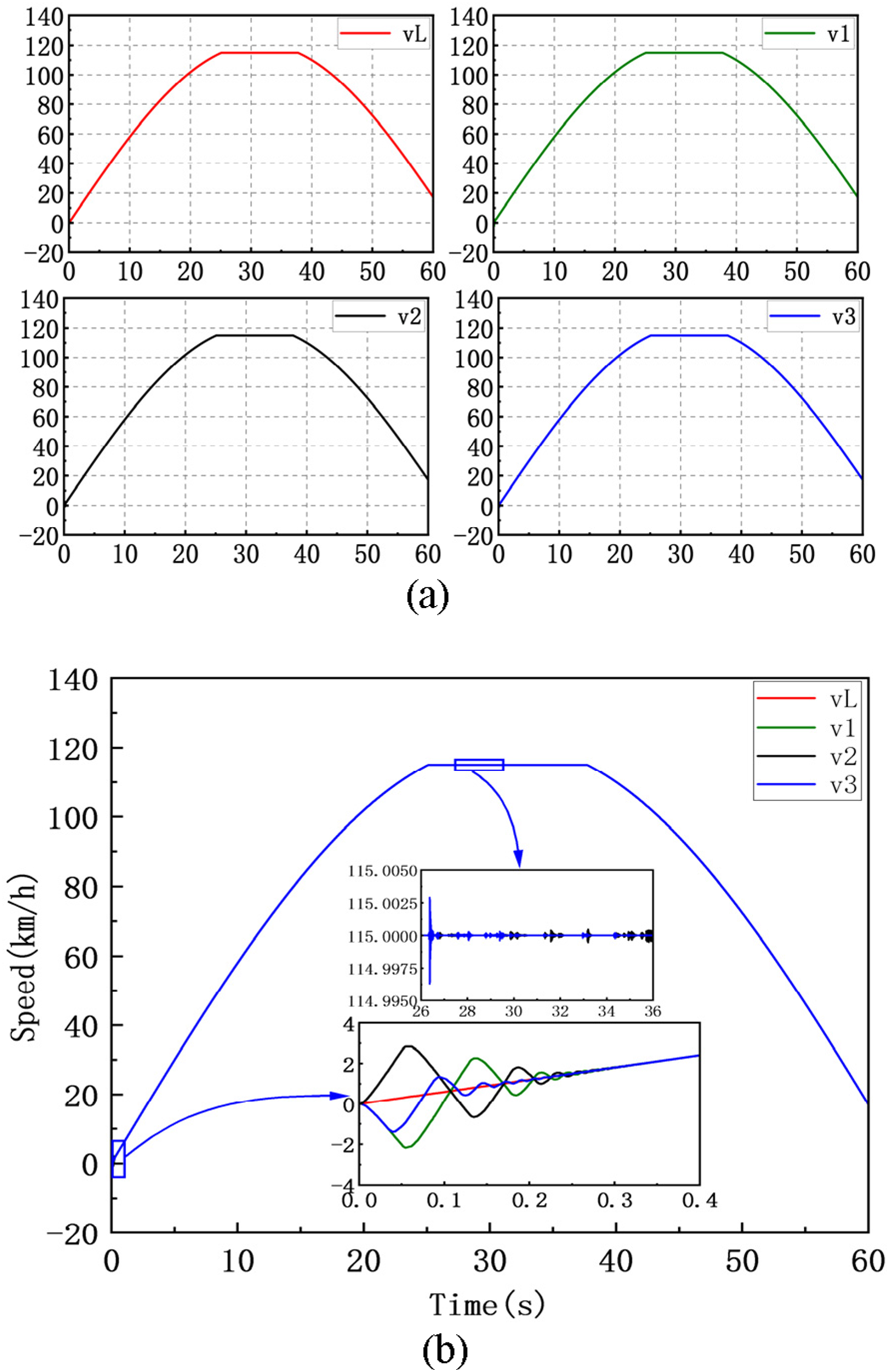
As illustrated in Figure 6, under the ACC’s action, each follower train’s speed tracked the leader train’s speed within 1.3 s. However, when input saturation occurred at 10 s, the speed trajectory of each follower train began to deviate. The deviation persisted until the saturation disappeared, after which the speed re-tracked to match that of the leader train. Conversely, as shown in Figure 7, under the action of EDT-ASRC, the speeds of all follower trains converge to that of the leader train within 0.3 s. When input saturation occurs, owing to the auxiliary anti-saturation effect of DSAsC, the speed tracking trajectories of the follower trains remain nearly unaffected. Speed tracking trajectories under ACC: (a) speed track curve of each train and (b) velocity trajectory contrast curve. Speed tracking trajectories under EDT-AsRC: (a) the train speed trajectory curve and (b) comparison curves of velocity trajectories.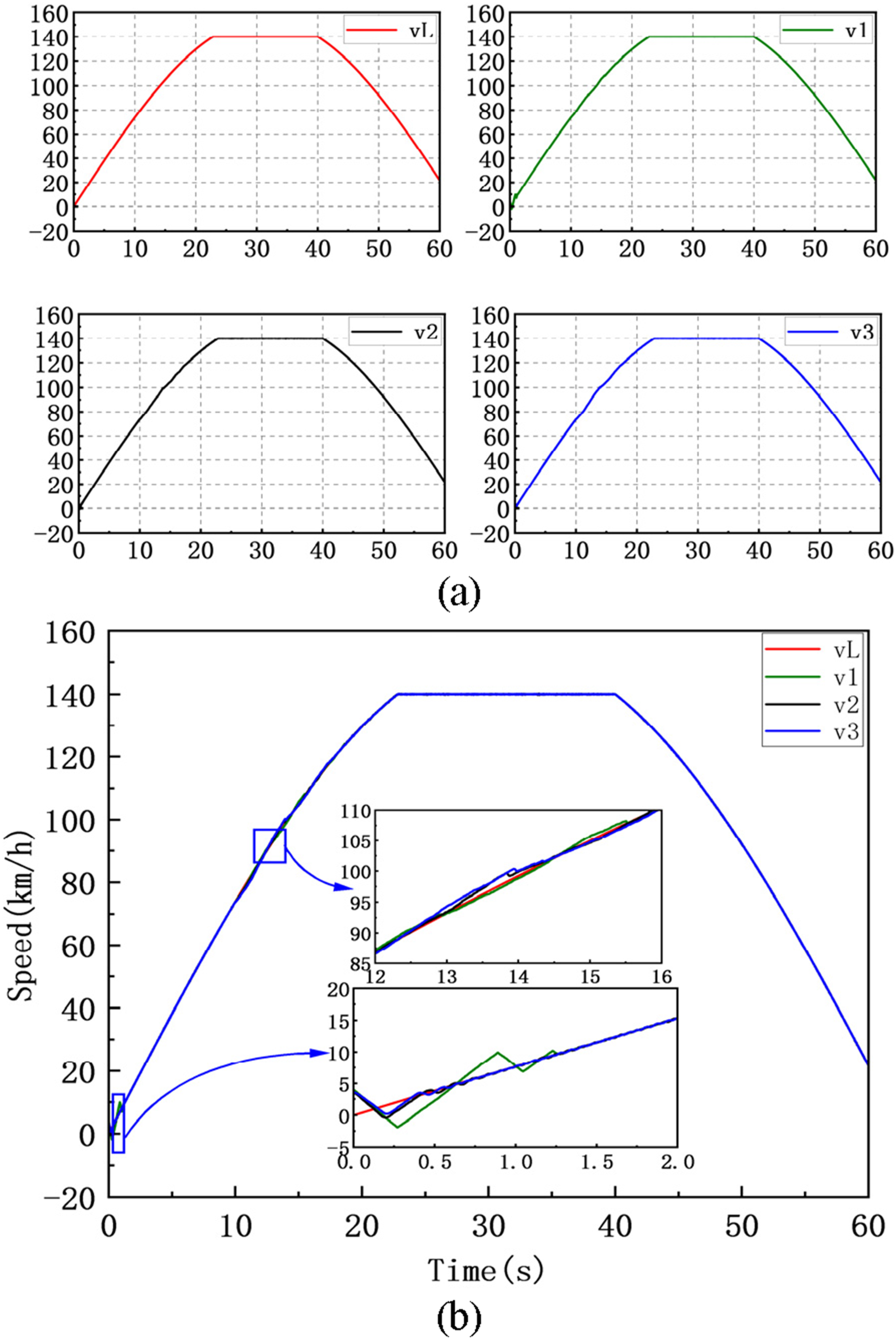
As illustrated in Figure 8(a), when considering input saturation during the operation of the high-speed train system, the maximum displacement error under ACC was 1.25 m. After 20 s of operation, the displacement error converged to zero. Under the EDT-AsRC algorithm, the maximum peak displacement error was only 0.2 m. Moreover, the displacement error stabilized and converged to zero within 5 s of operation. As displayed in Figure 8(b), during the operation of the high-speed train system, the maximum speed error under the action of the ACC was 1.0 km/h. When input saturation occurred, this error reduced to 0.08 km/h, and it converged to zero after 22 s of operation. In contrast, under the EDT-AsRC, the maximum speed error was 0.08 km/h. When input saturation occurred, this error decreased to 0.01 km/h. As depicted in Figures 4–8, the tracking and anti-saturation performances of the EDT-AsRC algorithm exceeded those of the ACC algorithm under input saturation conditions in a high-speed train system. Displacement and speed errors of the ACC and EDT-AsRC algorithms under input saturation conditions: (a) displacement error comparison and (b) speed error comparison.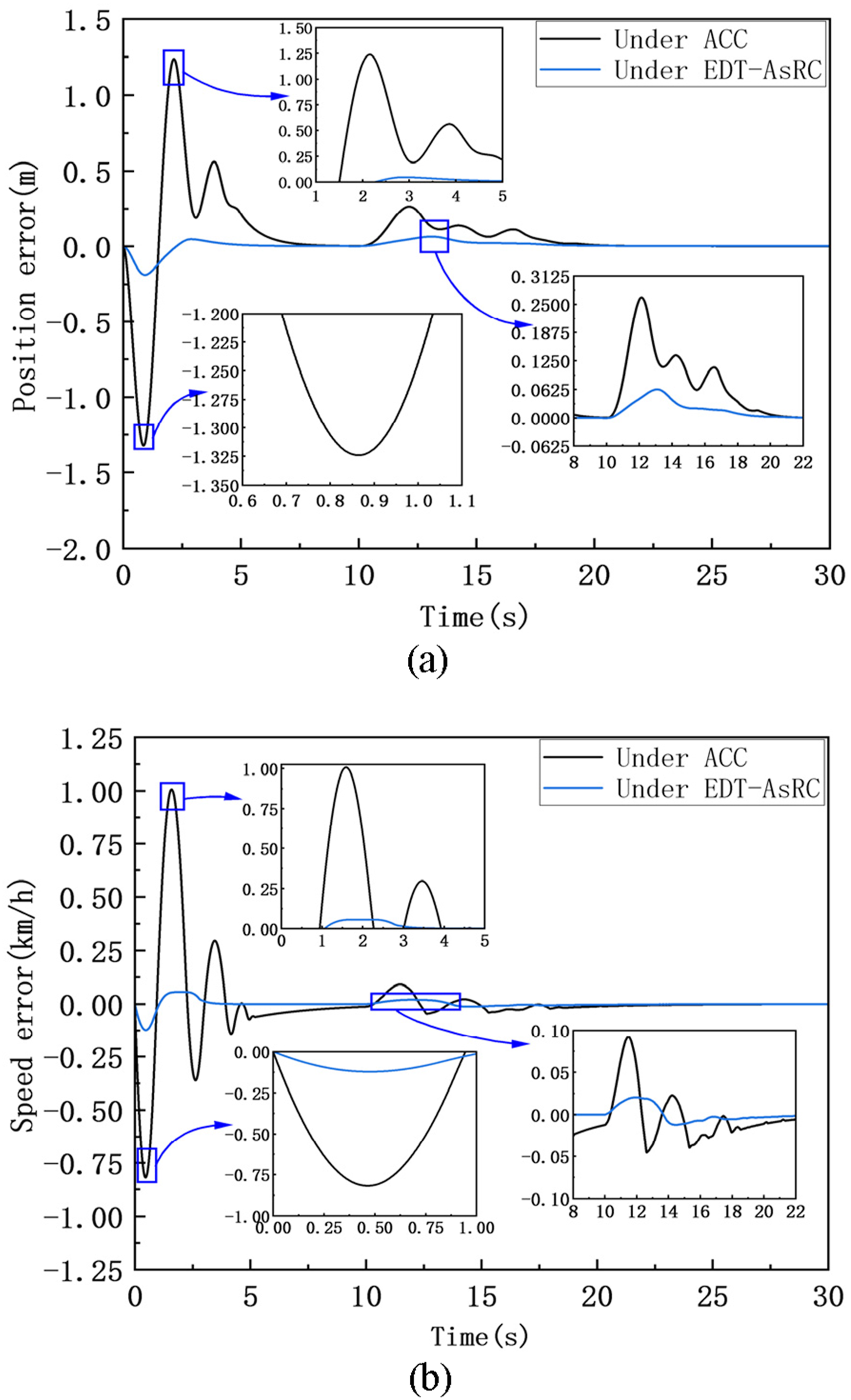
From Figure 9, fluctuations were observed in the distances between trains during the initial acceleration and deceleration phases of the tracking process, with 0 s≤ t ≤ 40 s. After 40 s of operation, under the action of the EDT-AsRC, the system returned to stable operation, maintaining safe distances between the high-speed trains. Safe distances between trains under input saturation conditions.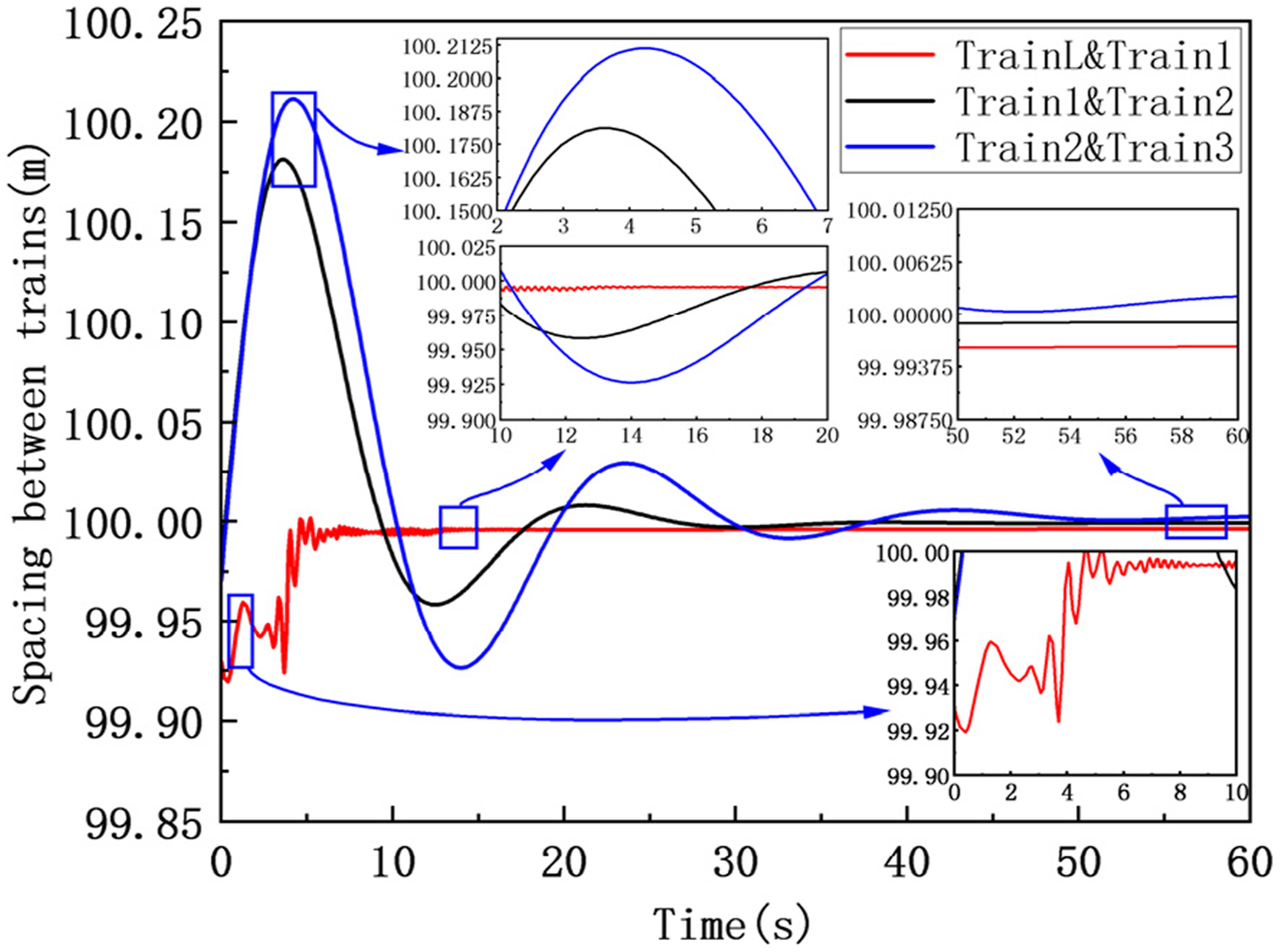
Performance comparison of different control strategies under saturation.
Simulation comparison under input saturation and communication delay conditions
From Figure 10, the speed track of the leader train under different delay times, it can be seen that with the increase of delay time, the speed of the leader train deviates more and more from the actual speed under delay. If the communication delay is not considered, the speed curve followed by the follower train will not be consistent with the actual multi-train system operation. When the high-speed train system experienced a communication delay Velocity trajectories at different delay times: (a) Delay 0s, (b) Delay 1.0s, (c) Delay 1.5s, (d) Delay 2s, (e) Delay 2.5s, and (f) Delay 3s.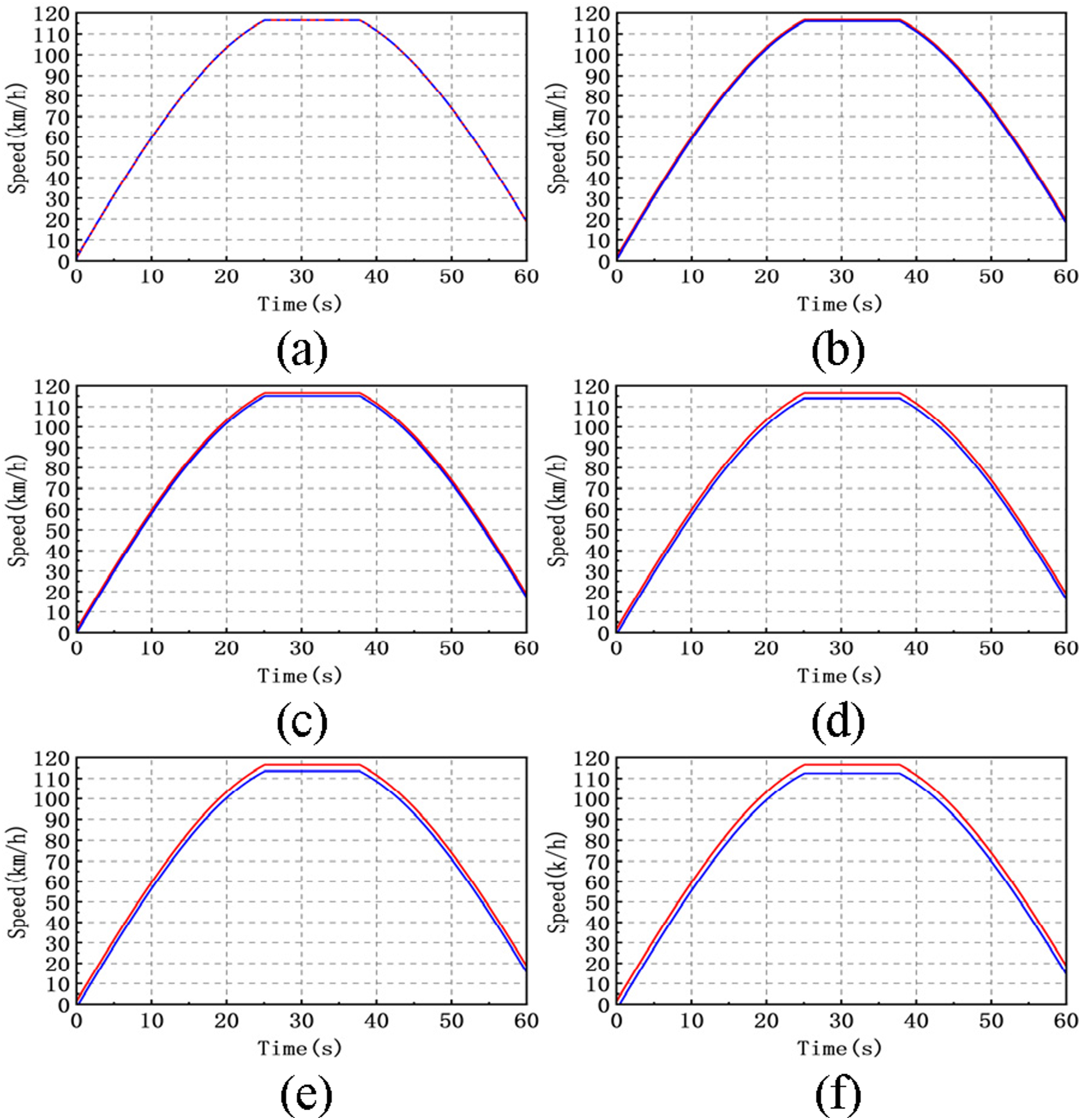
As illustrated in Figure 11(a), under the DACC algorithm, input saturation resulted in a maximum displacement error of 1.7 m, accompanied by significant jitter. Additionally, owing to the inability of the DACC algorithm to predict delay information, it failed to ensure that the follower trains tracked the leader train’s position at the time Displacement and speed errors of the DACC and EDT-AsRC algorithms under input saturation and communication delay conditions: (a) displacement error comparison and (b) speed error comparison.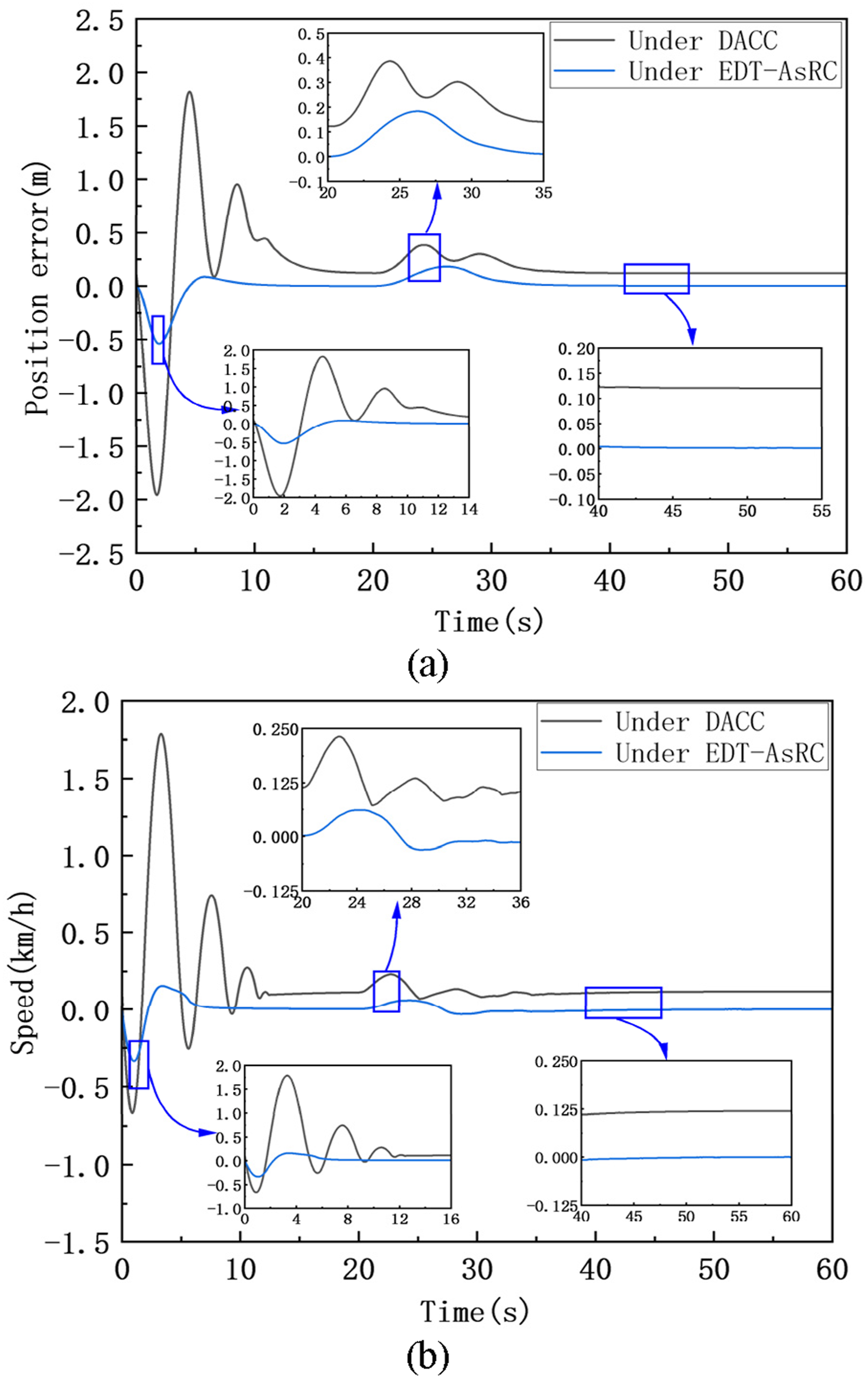
As displayed in Figure 11(b), under the DACC algorithm, the maximum speed error was 1.8 km/h due to input saturation, with noticeable jitter. Furthermore, the DACC algorithm failed to account for communication delays, preventing the follower trains from tracking the speed state of the leader train
From Figure 12, under the action of input saturation and communication delay, the virtually coupled train set returned to stable operation within 10 s when using the EDT-AsRC algorithm. The distance between each high-speed train was maintained at a safe distance. Safe distances between trains under input saturation and communication delay conditions.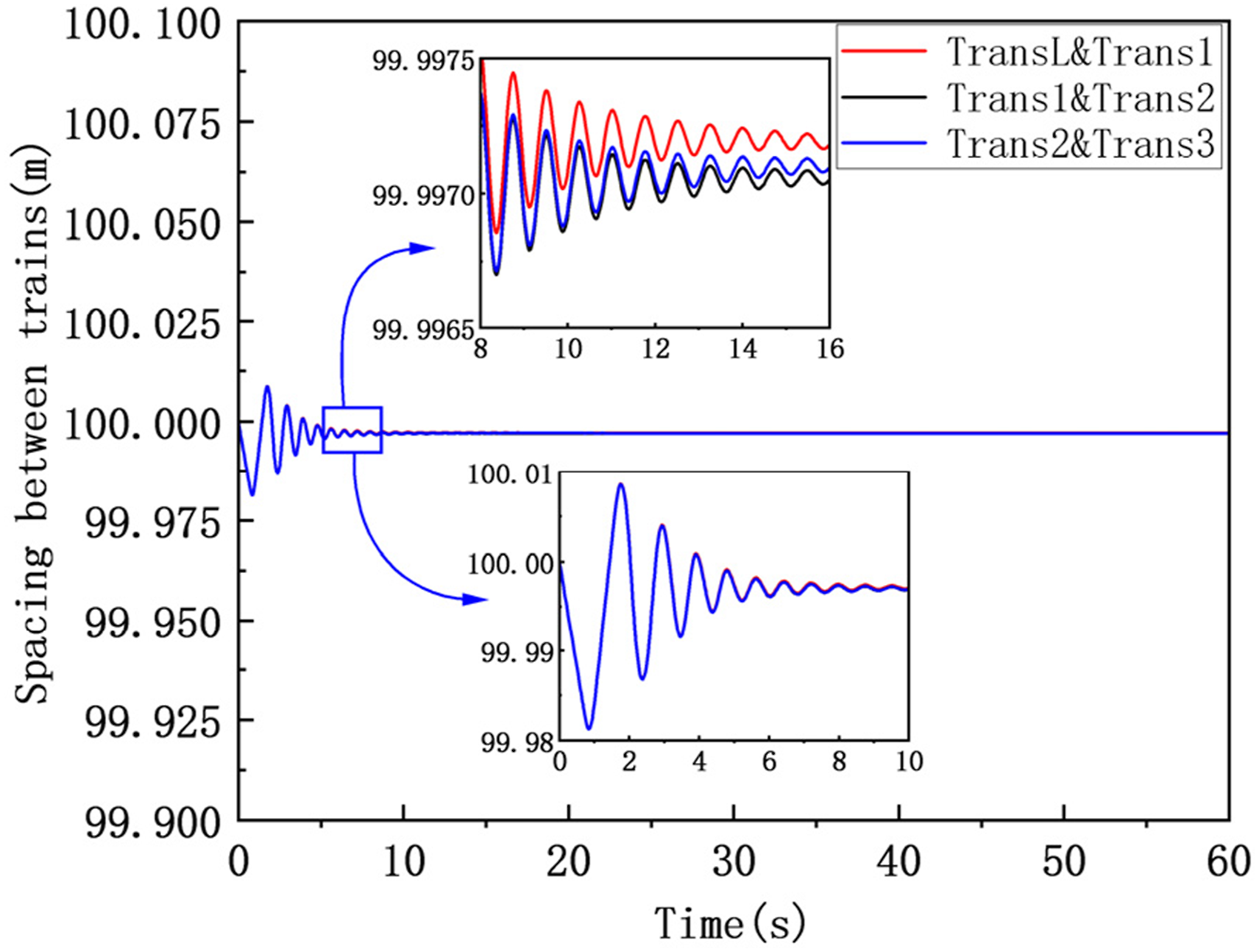
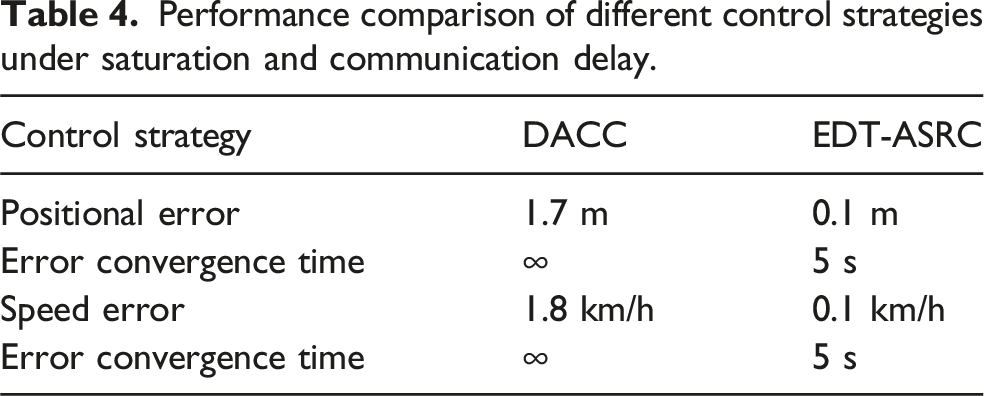
Performance comparison of different control strategies under saturation and communication delay.
Experimental validation
The practicality of the EDT-AsRC algorithm for engineering applications was verified on the RT-LAB semi-physical platform shown in Figure 13, which experimentally simulates the real-world operation of a virtually coupled train set. The parameters used were consistent with those in the MATLAB simulations. Through this platform, the proposed EDT-AsRC was compared with the Train Tracking Controller (TTC) (Cai and Huang, 2024), further demonstrating its superior performance. RT-LAB semi-physical simulation platform: (a) photograph of the RT-LAB semi-physical control system and (b) configuration of the RT-LAB hardware system.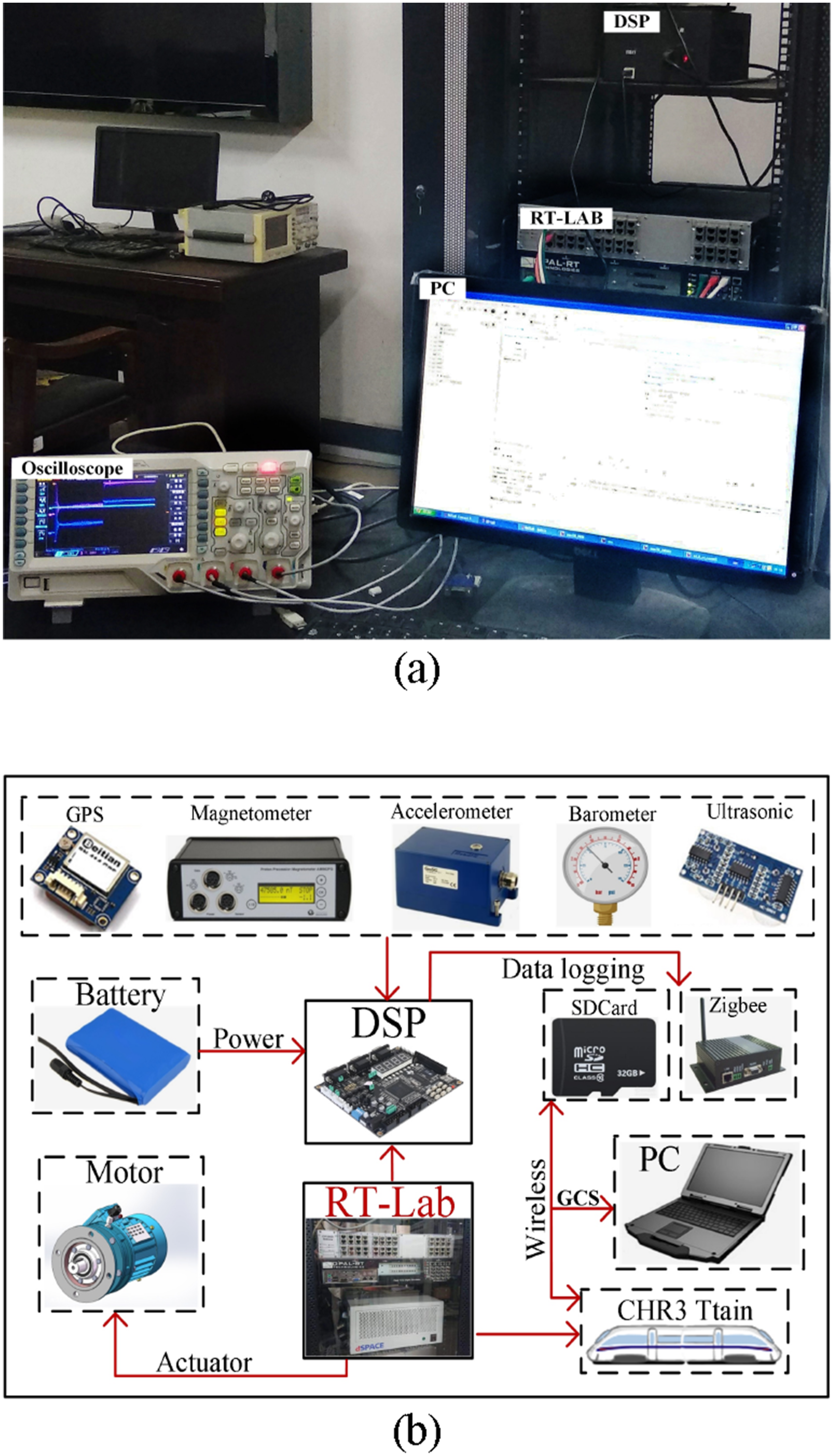
The experimental waveforms of displacement errors in Figure 14(a) indicate that under the DACC algorithm, the maximum displacement error was 1.8 m due to input saturation, with substantial jitter. Additionally, the DACC algorithm failed to predict the delay information, causing the follower train to track the position state of the leader train Displacement and speed errors of the EDT-ASRC and TTC: (a) displacement error comparison and (b) speed error comparison.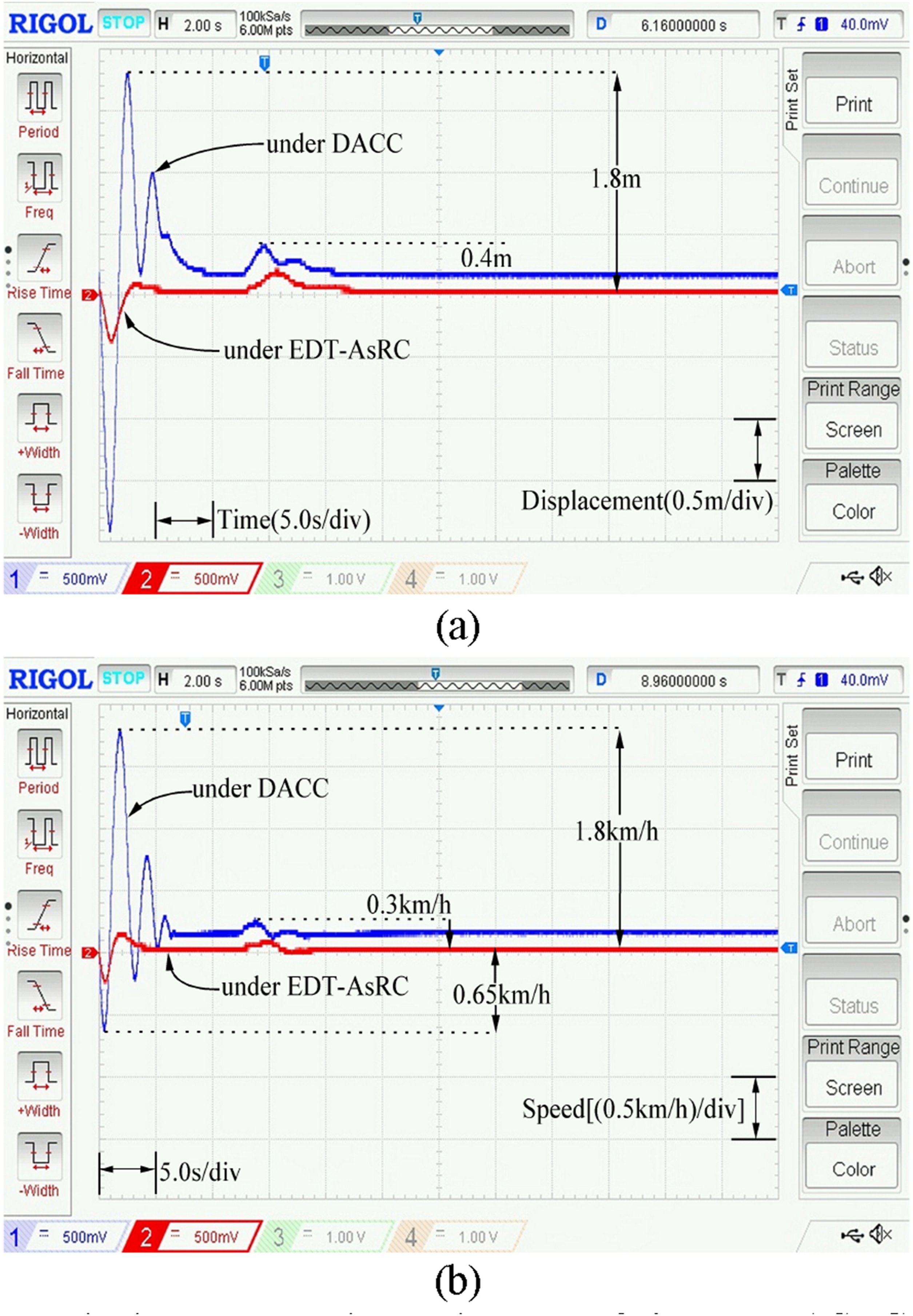
As illustrated in Figure 15, which shows the experimental waveforms of safe distances, it can be observed that the EDT-AsRC algorithm quickly restored the virtually coupled high-speed train set to stable operation under conditions of input saturation and communication delay. Furthermore, adjacent trains maintained safe distances throughout the entire process. Safe distances between trains in the validation experiment.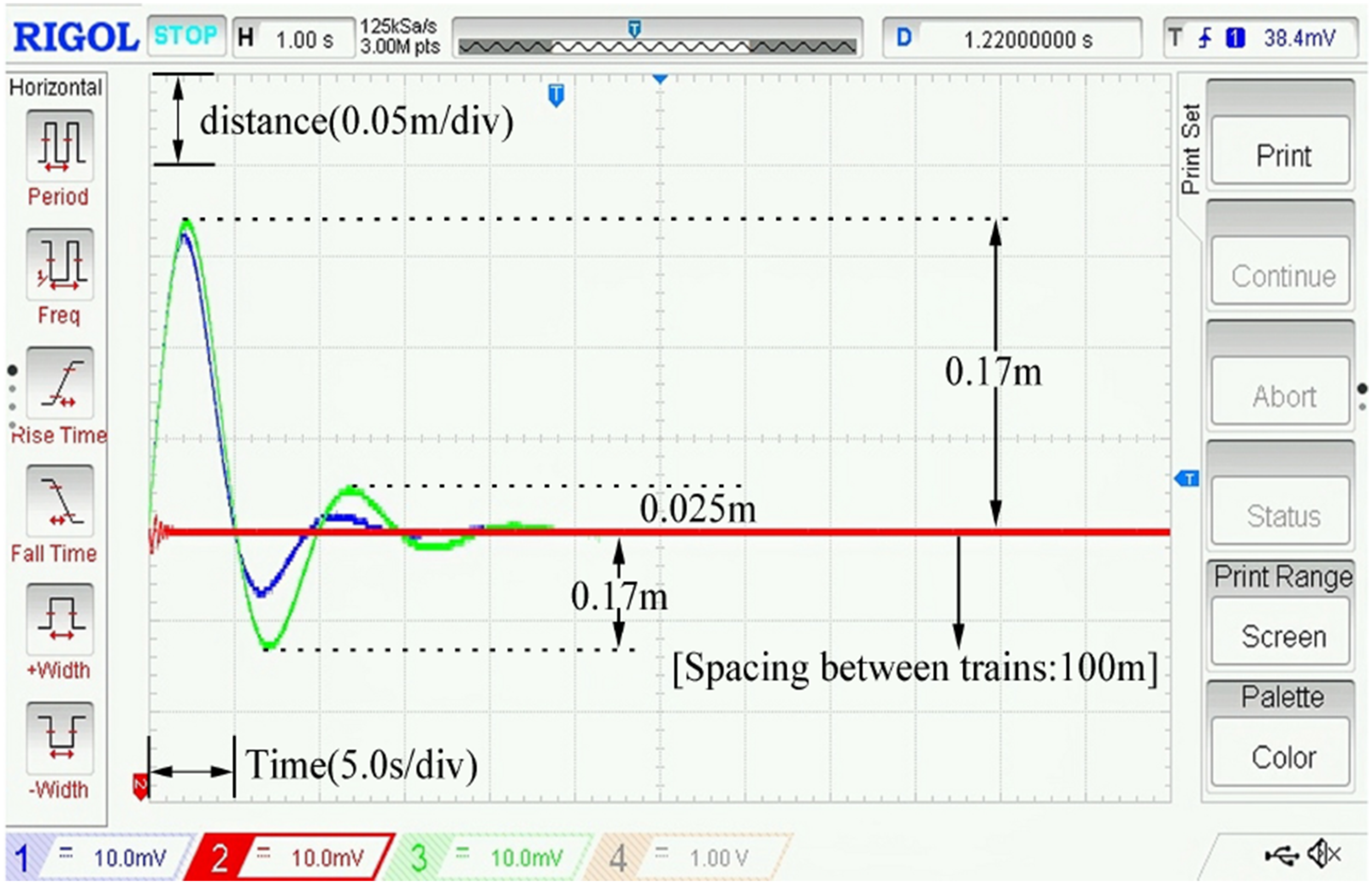
Figures 14 and 15 show that the EDT-ASRC algorithm successfully mitigates input saturation and communication delays, exhibiting superior tracking control and anti-saturation performance. This agreement between experiment and theory further confirms the strategy’s effectiveness and reliability.
Conclusion
This study addressed the challenge of maintaining safe distances between adjacent trains in a virtually coupled high-speed train set subjected to input saturation and communication delay. The proposed robust self-adaptive control algorithm predicts the delay state of the leader train and resolves the input saturation problems. The superiority of this algorithm was validated through simulation and experimental comparisons. The key conclusions are summarized below: (1) A new saturation function called the DSHTSF mitigates overload problems caused by the fixed and abrupt saturation limits of traditional saturation functions in control systems. This function allows the actual control input to smoothly approach the maximum traction or braking force, which depends on the train speed. Based on the DSHTSF, a DSAsC was designed to ensure that the control traction force remained smoothly constrained within the saturation limits. DSAsC demonstrated higher anti-saturation performance than the ACC designed with traditional saturation functions, which exhibit abrupt jumps in traction and braking forces during operation. (2) To address the communication delay issue during information exchange among multiple trains in virtual coupling, a prediction formula named DSP is proposed. Simulation results verify that this algorithm effectively predicts the state information of the leader train under communication delay, enabling the follower high-speed trains to track the predicted state of the leader. Therefore, this formula can effectively resolve the communication delay problem during the operation of multiple trains. (3) To ensure a safe distance between adjacent trains under input saturation and communication delay conditions, the DSAsC value was fed back into the designed adaptive terminal SMC, establishing the EDT-AsRC algorithm. Unlike the DCAA, the proposed algorithm tracked the speed of the leader train within 5 s even during coincident input saturation and communication delay. The algorithm also maintained a safe distance between adjacent trains quickly. Therefore, EDT-ASRC has good performance in solving the problems of input saturation and communication delay.
Considering the complexity of the actual operating environment of trains, actuator faults are difficult to completely avoid. Future research will focus on exploring stable control methods for multi-train systems under actuator faults, to enhance system reliability and robustness under abnormal operating conditions.
Footnotes
Ethical considerations
The research excludes human participants, their data, and biological material, as well as animals.
Author contributions
Jing He: Investigation and supervision. Yu Long: Validation, writing—original draft, and writing—review and editing. Changfan Zhang: Methodology, and writing—review and editing.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the National Natural Science Foundation of China (grant numbers 52572375) and the Project of Hunan Provincial Natural Science Foundation of China (grant numbers 2025JJ70058 and 23A0426).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
Data will be made available on request.