It is known that in finite element model updating (FEMU), an important yet challenging problem is how to preserve the structural connectivity and adjust only the inaccurate elements in the coefficient matrices using measured modal data, without altering the accurate elements in the analytical matrices (i.e., local model updating (LMU)). In this paper, an iterative method for solving this problem by using the acceleration-velocity-displacement feedback (AVDF) technique is developed. With this method, the physical connectivity of the original model is preserved, and only the erroneous elements in the analysis matrices are corrected, while the error-free ones remain unchanged, achieving LMU. Numerical examples confirm the effectiveness of the introduced method.
Finite element model updating (FEMU) methods have attracted widespread attention in the context of civil engineering structures in recent years (Ereiz et al., 2022; Kaveh, 2014; Ren and Chen, 2010; Sehgal and Kumar, 2016; Wang et al., 2014), due to its wide applicability in vibration control, safety and reliability (Bansal and Cheung, 2017; Sundar and Manohar, 2013), and structural health monitoring (Ching et al., 2006; Ghannadi et al., 2023, 2025; Yin et al., 2017). Apparently, finite element (FE) pre-models are often highly idealized and may not accurately represent real structures. This discrepancy stems from incorrect assumptions in model parameters (Ye and Chen, 2019) (e.g., material properties, cross-sectional properties, and element thickness), excessive simplifications in structural modeling, and improper representation of the mesh connectivity, boundary conditions, and joints (Farshadi et al., 2017; He et al., 2020; Sun et al., 2020), etc. In general, the results obtained from pre-models differ from the measured results. To better predict the responses of an actual structure, it is necessary to update an existing FE model with measured data.
Vibration is generally undesirable in machines, vehicles, buildings, and other dynamic systems. Resonance is especially harmful, as it not only induces unwanted motion but also generates dynamic stresses that may result in fatigue and failure. To avoid resonance with excitation frequencies, an effective countermeasure is adjusting natural frequencies via external forces. Thus, the complex rotating structures (such as spinning disks, helicopter rotor blades, solar panels, etc.) can be FE discretized as the following differential equation:
the notations used throughout this paper are given in Table 1. z(t) is the n × 1 vector of positions, and f(t) is the n × 1 vector of external force. By considering the homogeneous part of Eq. (1) and assuming that the displacement response of (1) is harmonic, that is,
which yields the eigenvalue–eigenvector equation as follows:
where ω and ϕ ≠ 0 are the eigenvalues and the eigenvectors of the system (1), respectively.
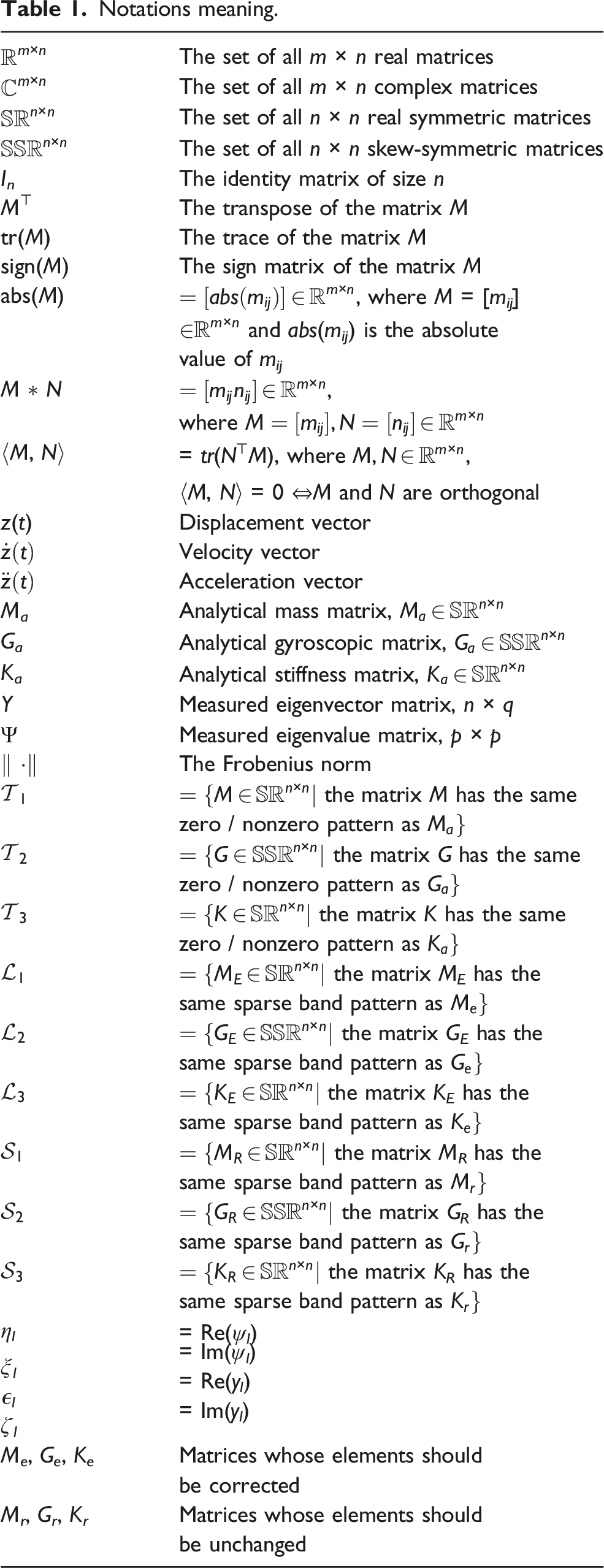
Notations meaning.
The set of all m × n real matrices
The set of all m × n complex matrices
The set of all n × n real symmetric matrices
The set of all n × n skew-symmetric matrices
In
The identity matrix of size n
M⊤
The transpose of the matrix M
tr(M)
The trace of the matrix M
sign(M)
The sign matrix of the matrix M
abs(M)
, where M = [mij]
and abs(mij) is the absolute
value of mij
M ∗ N
,
where
⟨M, N⟩
= tr(N⊤M), where ,
⟨M, N⟩ = 0 ⇔M and N are orthogonal
z(t)
Displacement vector
Velocity vector
Acceleration vector
Ma
Analytical mass matrix,
Ga
Analytical gyroscopic matrix,
Ka
Analytical stiffness matrix,
Y
Measured eigenvector matrix, n × q
Ψ
Measured eigenvalue matrix, p × p
‖ ⋅‖
The Frobenius norm
the matrix M has the same
zero / nonzero pattern as
the matrix G has the same
zero / nonzero pattern as
the matrix K has the same
zero / nonzero pattern as
the matrix ME has the
same sparse band pattern as
the matrix GE has the
same sparse band pattern as
the matrix KE has the
same sparse band pattern as
the matrix MR has the
same sparse band pattern as
the matrix GR has the
same sparse band pattern as
the matrix KR has the
same sparse band pattern as
ηl
= Re(ψl)
ξl
= Im(ψl)
ϵl
= Re(yl)
ζl
= Im(yl)
Me, Ge, Ke
Matrices whose elements should
be corrected
Mr, Gr, Kr
Matrices whose elements should
be unchanged
The dynamics of equation (1) can be modified by applying a control force Bu(t), where is the control feedback matrix and is the control vector. Then, Eq. (1) now becomes
The active feedback controller u(t) is designed as the following form:
where are acceleration, velocity, and displacement feedback gain matrices. By substituting (4) into (3) yields the following closed-loop system:
If let and , denote the closed-loop eigenvalue and eigenvector matrices, respectively. Then the following generalized eigenvalue equation of the closed-loop system (5) holds:
Treating the measured eigenstructure (i.e., modal data) as the desired one directly applies the idea of eigenstructure assignment (EA) in control theory. As we know, Minas and Inman (1987, 1990) were the first to use the concept of EA to solve the model updating (MU) problem. Similar work can be found in References (Datta, 2002; Kuo et al., 2005; Yuan et al., 2016; Yuan and Liu, 2014; Zimmerman and Widengren, 1990). This paper aims to modify the analytical matrices Ma, Ga, and Ka simultaneously via acceleration-velocity-displacement feedback (AVDF), such that the corrected second-order system (6) incorporates some measured modal data. Specifically, the desired perturbations ΔM, ΔG, and ΔK (see Eqs. (13)–(15)) serve as gain matrices in a feedback control algorithm designed to perform EA. In this way, high-fidelity MU can be realized.
Over the past decades, numerous FEMU methods have been developed for undamped and damped systems (Bai et al., 2011; Berman and Nagy, 1983; Friswell et al., 1998; Kuo et al., 2006; Yuan, 2008; Yuan and Liu, 2011, 2012). As another critical class of second-order systems, conservative gyroscopic systems have also garnered significant interest (Datta et al., 2002, 2000; Jia and Wei, 2011; Mao and Dai, 2014). Unfortunately, the methods for gyroscopic systems mentioned above cannot preserve the structural connectivity of the original FE model, which may result in unwanted load paths. To preserve the sparsity pattern of the original matrices for the second-order structural systems, Cha and Switkes (2002) adjusted the analytical mass, damping and stiffness matrices (MDSMs) by utilizing the frequency response function and the structural connectivity information. Hu and Li (2007) simultaneously modified the MDSMs using the cross-model cross-mode (CMCM) method. Zhang and Yuan (2020) updated the mass, gyroscopic and stiffness matrices (MGSMs) with connectivity constraints by utilizing the Moore–Penrose inverse and the Kronecker product of matrices. Recently, Zeng and Yuan (2023) corrected the MGSMs by an iterative algorithm. Although the aforementioned methods considered the structural connectivity of the original model, they globally and indistinguishably corrected both erroneous and error-free elements (i.e., global model updating (GMU)), which may introduce non-existent load paths.
Since errors in MU primarily stem from inappropriate modeling assumptions, incorrect boundary conditions, uncertain material properties (Farshadi et al., 2017; He et al., 2020; Sun et al., 2020; Ye and Chen, 2019), and so forth, they are typically localized. If the analytical matrices are globally modified, both the erroneous and error-free elements will be altered, which undermines the model’s physical fidelity. On the other hand, Datta (2002) pointed out that a vibration engineer faces the problem of updating the existing finite element model (FEM) with minimal changes, so that the updated FEM preserves the basic properties. Therefore, it is more ideal to perform localized corrections solely on the incorrect elements. Then, how can we identify the erroneous elements? The answer can be found in References (Cobb and Liebst, 1997; Farhat and Hemez, 1993; Ghannadi et al., 2020; Ghannadi and Kourehli, 2020, 2022; Lin, 1990; López-Díez et al., 1999; Wahlberg and Ljung, 1992; Xie, 1999). Yuan and Dai (2008) and Xu and Yuan (2022) have considered the problem of LMU by formulating it as a matrix optimal approximation (OA) problem subject to submatrix constraints. However, the method proposed by Xu and Yuan (2022) fails to preserve the connectivity of the original model. So, how can we simultaneously achieve LMU and preserve the connectivity of the original model? No practical method has been provided to solve the problem. Motivated by the work in Zeng and Yuan (2023), we will discuss the problem in the following. Concretely, the problem of updating MGSMs simultaneously using AVDF can be stated as follows.
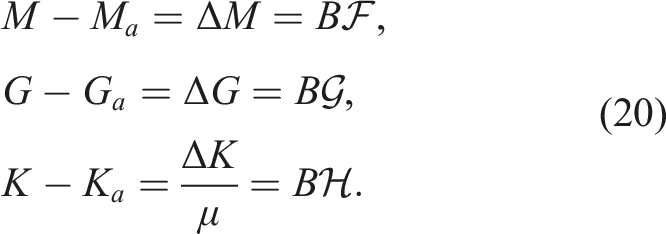
Problem LMU. Assume that the inaccurate elements of the analytical MGSMs are determined, then Ma, Ga and Ka can be decomposed as
where . Let the measured eigenvalue and eigenvector matrices be given by and , and both Ψ, Y are closed under complex conjugation . Find , , such that
where , , , , the matrices , , .
Problem OA. Let be the solution set of Problem LMU. Find such that
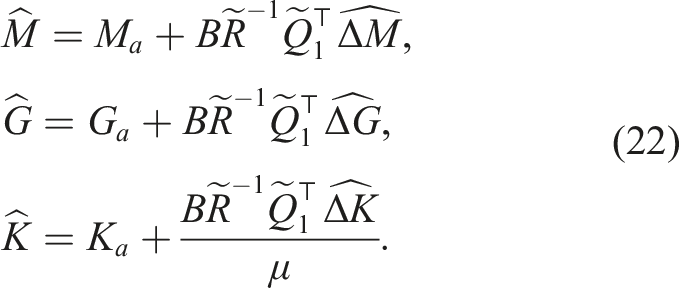
where μ is a weighting factor. Once the solution of Problem OA is obtained, the updated mass matrix , gyroscopic matrix , and stiffness matrix can be expressed as
In this paper, we will establish an AVDF–iterative method to solve Problems LMU and OA, and the updated FEM has the following properties:
Only the erroneous elements in the analysis matrices are modified, while the error-free ones remain unchanged.
The connectivity of the original model is preserved.
The measured eigenvalues and eigenvectors are incorporated into the updated model.
The deviation of the updated model from the original model is minimal.
Unlike the direct updating methods in Datta et al., 2002, 2000), Jia and Wei (2011), Mao and Dai (2014), and Zhang and Yuan (2020), the proposed iterative method can obtain optimal correction matrices of Problems LMU and OA within finite iteration steps in the absence of rounding errors. The algorithm proposed requires less storage capacity than the existing numerical ones and is numerically reliable, as only matrix manipulation is required. More importantly, this method only corrects the erroneous elements in the analysis matrices, and the symmetric sparse structures of the original model are retained, which is helpful for further analysis of the structure under different boundary conditions.
The rest of the paper is organized as follows. In section 2, an iterative algorithm for solving Problems LMU and OA is constructed and the convergence properties are discussed. In section 3, some numerical examples will be given to demonstrate the effectiveness of the method. Some concluding remarks are given in section 4.
2. Solving problems LMU and OA
Lemma 1. (Ben-Israel and Greville 2003) If and , then the matrix equation has a solution if and only if In this case, the general solution of the equation can be described as where is an arbitrary matrix.
We notice that if is a linear subspace of , then for an arbitrary matrix , it can be uniquely decomposed into Z = Z1 + Z2, where . And it is easy to check that . Therefore, a linear projection operator on can be defined as follows:
Clearly, for any and , we have
Utilizing the idea above, we can establish linear projection operators on , on as follows:
Define
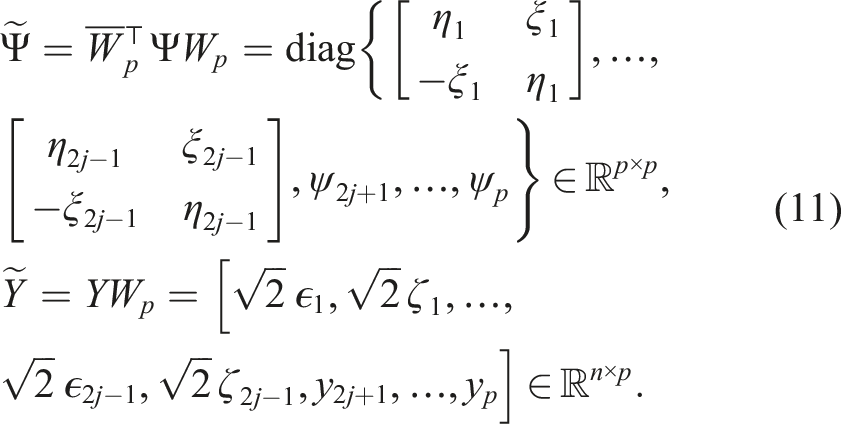
It is easily proven that Wp is a unitary matrix, that is, . By applying this matrix, we can get
It follows from (11) that the equation of MYΨ2 + GYΨ + KY = 0 is equivalent to
Let the desired perturbations in the mass, gyroscopic, and stiffness matrices be represented as gain matrices, that is,
Assume that QR-decomposition of B is
where is an n × n orthogonal matrix and is an m × m nonsingular matrix. It follows from Lemma 1 and (16) that the equation of (13) with respect to has a solution if and only if
and the unique solution is
It follows from Lemma 1 and (16) that the equation of (14) with respect to has a solution if and only if
and the unique solution is
It follows from Lemma 1 and (16) that the equation of (15) with respect to has a solution if and only if
where ΔM = M − Ma, ΔG = G − Ga, ΔK = μ(K − Ka), . Therefore, once the minimum Frobenius norm solution (MFNS) of (21) is obtained, the optimal updated MGSMs can be given by
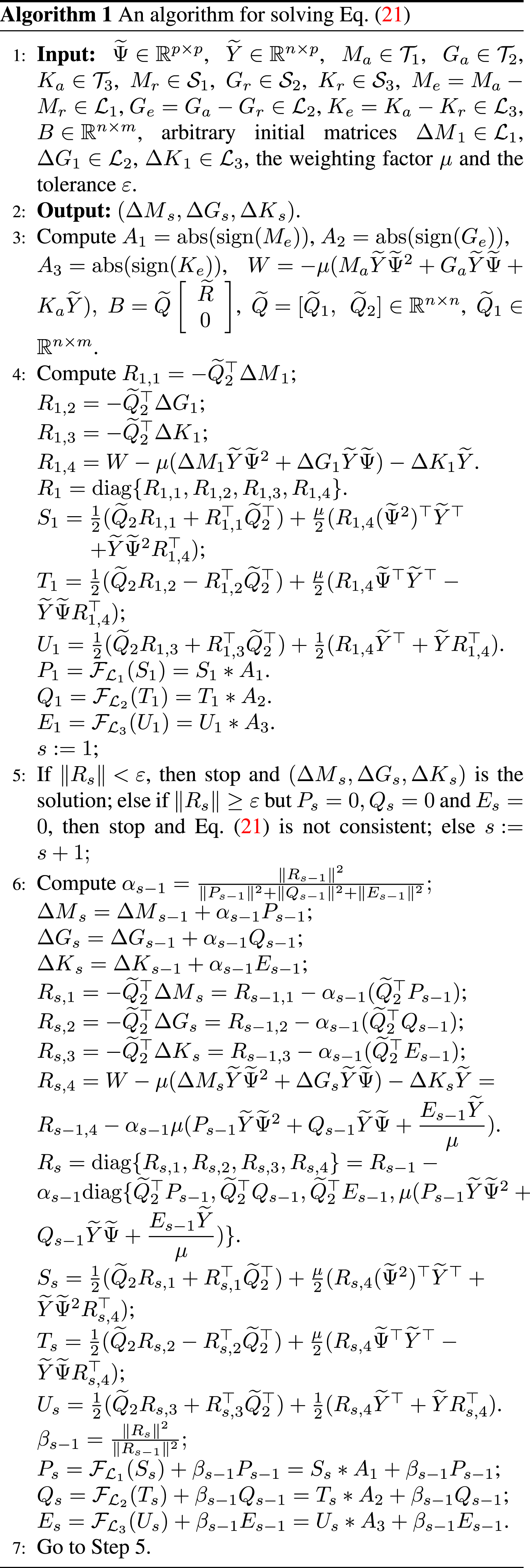
Applying the property above, we can construct an iterative algorithm (see Algorithm 1) to solve Eq. (21).
Remark 1. Different from direct updating methods, Algorithm 1 requires less storage capacity than existing ones and is numerically reliable. After careful statistics, we find that the amount of computations required by Algorithm 1 is about 12n3 + 11n2p − 8n2m + 6n2 + 10np2 + 8 nm2 + 9 m3 flops.
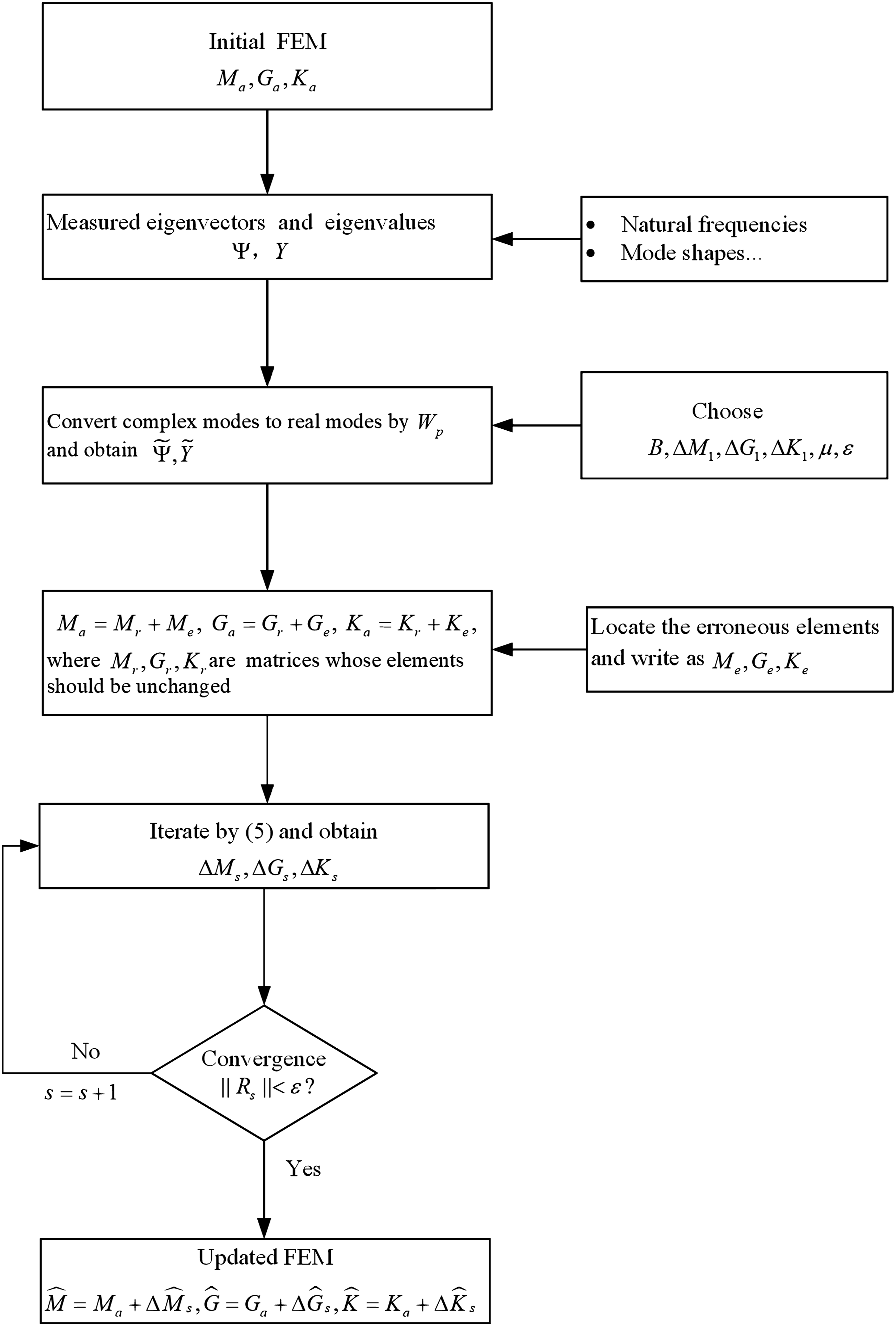
From Algorithm 1, we can obtain the following flowchart (Figure 1).
Flowchart of proposed AVDF–iterative method.
According to Algorithm 1, it is easily seen that ΔMs, , ΔGs, and ΔKs, for s = 1, 2, 3, ⋯ , by these relationships, we can prove some propositions as follows.
Proposition 1. The sequences {Rs}, {Ps}, {Qs}, and {Es} generated by Algorithm 1 satisfy
Proof. The proof of Proposition 1 is given in Appendix A. □
Proposition 2. Let be an arbitrary solution of Eq. (21). Then, for any initial matrix triplet with , , , we have
where the sequences {ΔMi}, {ΔGi}, {ΔKi}, {Pi}, {Qi}, {Ei}, and {Ri} are generated by Algorithm 1.
Proof. The proof of Proposition 2 is given in Appendix B. □
Thus, the desired assertion holds by applying the mathematical induction.
Theorem 1. Suppose that Eq. (21) is consistent. If an initial matrix triplet is chosen such that and by Algorithm 1, then a solution of Eq. (21) can be obtained with finite iteration steps.
Proof. The proof of Theorem 1 is given in Appendix C. □
Theorem 2. Suppose that Eq. (21) is consistent. If we take the initial matrices
where and are arbitrary matrices, or especially, Then, the MFNS of Eq. (21) can be obtained with finite iteration steps by Algorithm 1. Further, the optimal updated matrices of Problems LMU and OA are given by
Proof. The proof of Theorem 2 is given in Appendix D. □
Remark 2. As is well-known, how to preserve the physical connectivity (PC) of the original models while achieving localized error element correction remains a challenging problem in FEMU. On the basis of partitioning the analytical matrices into Ma = Mr + Me , Da = Dr + De , Ka = Kr + Ke , we take advantage of the AVDF–iterative method, achieving LMU. The method not only maintains the PC with the original model, but also corrects only the elements with errors, reaching localized modifications with minimal scope.
Remark 3. As we know, numerous studies have been conducted on preserving PC in FEMU for vibration systems. However, they all relied on full-element modification. In practical engineering, model errors are typically local. Although Yuan and Dai (2008) and Xu and Yuan (2022) have considered the partial correction problem, they failed to ensure PC. From this, we can find that it is difficult to perform LMU using the direct methods. Especially for undamped gyroscopic systems , the mass and stiffness are, in general, clearly defined by physical parameters. However, the effect of Coriolis forces (gyroscopic forces) in the model is not well understood because it is a purely dynamical property that cannot be measured statically. Thus, realizing LMU for undamped gyroscopic systems is particularly challenging. This paper simultaneously preserves PC and achieves LMU for undamped gyroscopic systems. These properties are useful for further structural analysis under different boundary conditions.
Remark 4. On the one hand, Zhang and Yuan (2020) employed matrix vectorization and the Kronecker product of matrices, which increases the computational scale of matrices, and is not suitable for solving large-scale problems. Unlike the direct updating methods in Zhang and Yuan (2020), the AVDF–iterative method computes optimal correction matrices in a finite number of steps in the absence of rounding errors. Algorithm 1 requires less storage capacity than the algorithm of Zhang and Yuan (2020) and is more numerically reliable because it relies solely on matrix operations. On the other hand, although they can preserve the PC of the original model, it performs a global correction of nonzero elements and cannot make point-by-point corrections to the elements as needed. This paper not only preserves the PC but also precisely achieves LMU.
3. Numerical examples
In this section, we will provide some numerical examples to demonstrate the effectiveness of Algorithm 1. All the tests are conducted by using MATLAB R2024a.
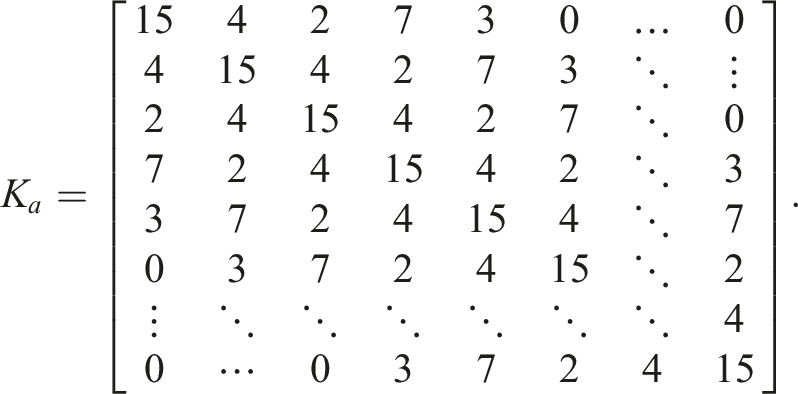
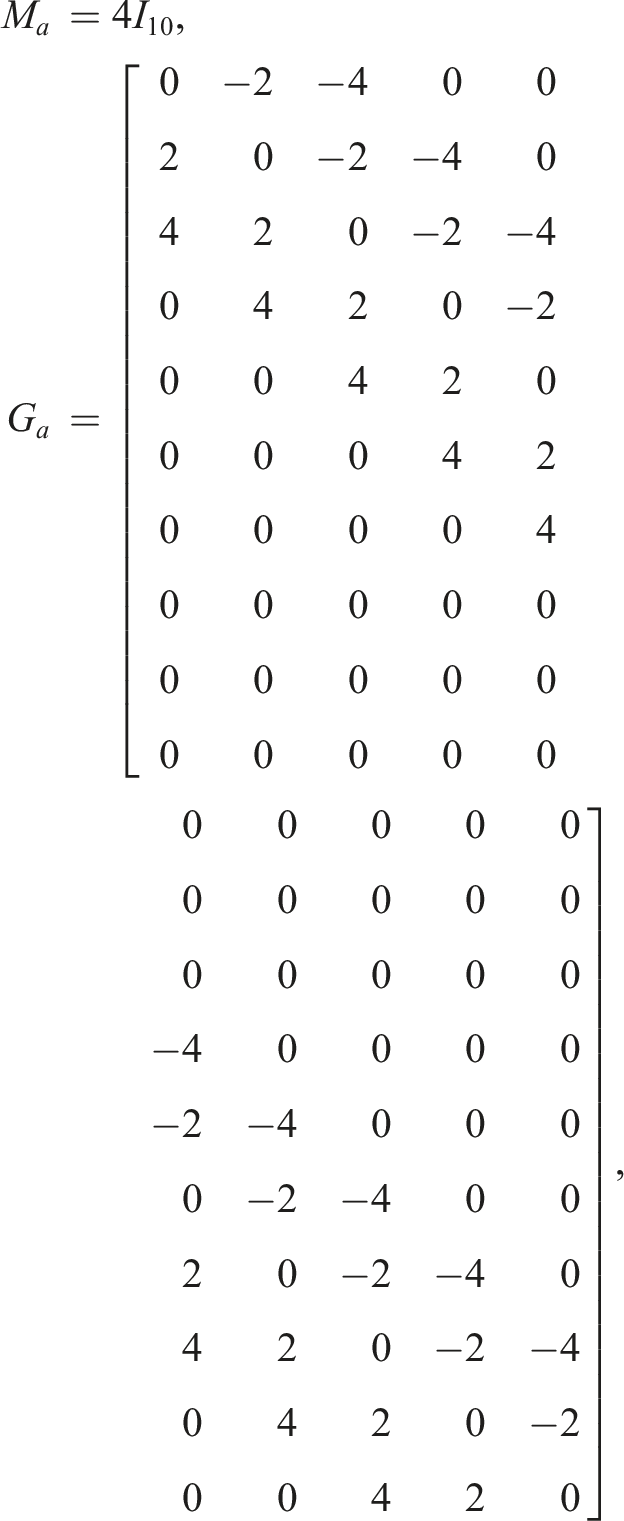
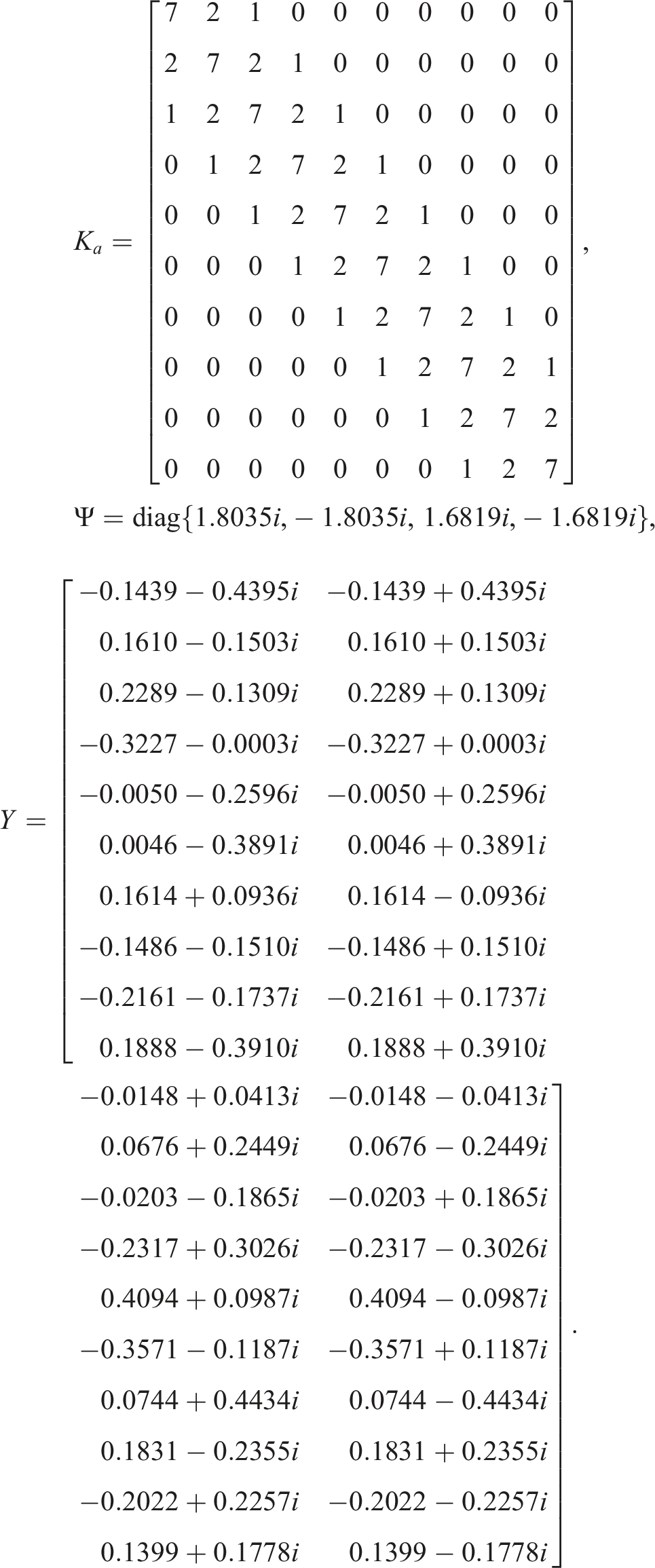
Example 1. (Liu et al., 2020) Consider a 10-degree-of-freedom gyroscopic system with the coefficient matrices, the measured eigenvalue matrix Ψ and the eigenvector matrix Y being given by
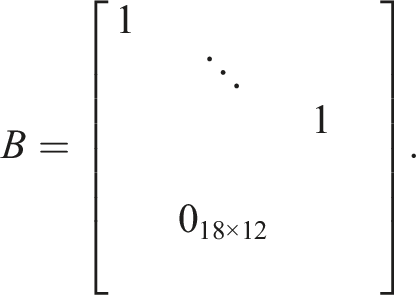
And the control feedback matrix is given by...
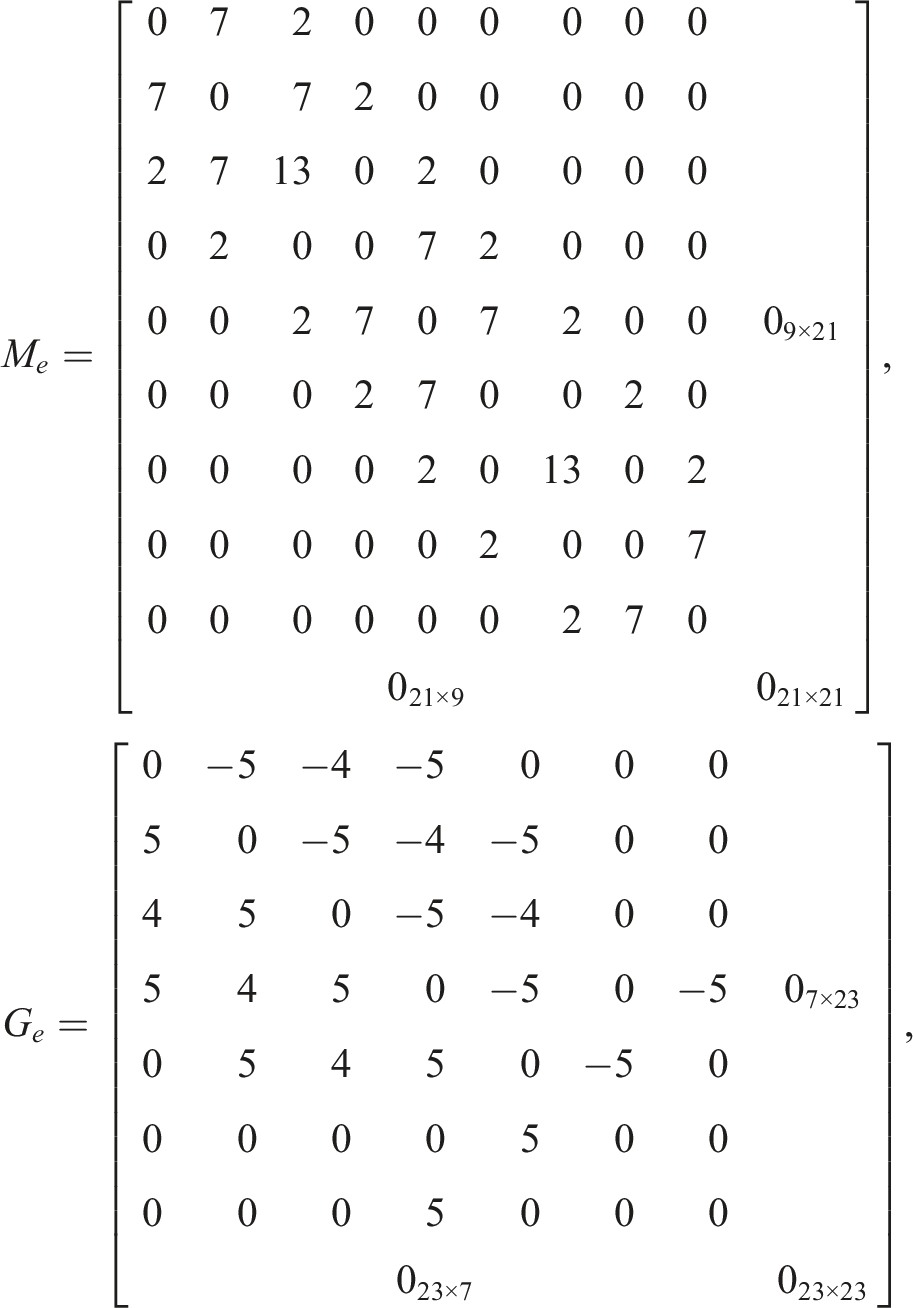
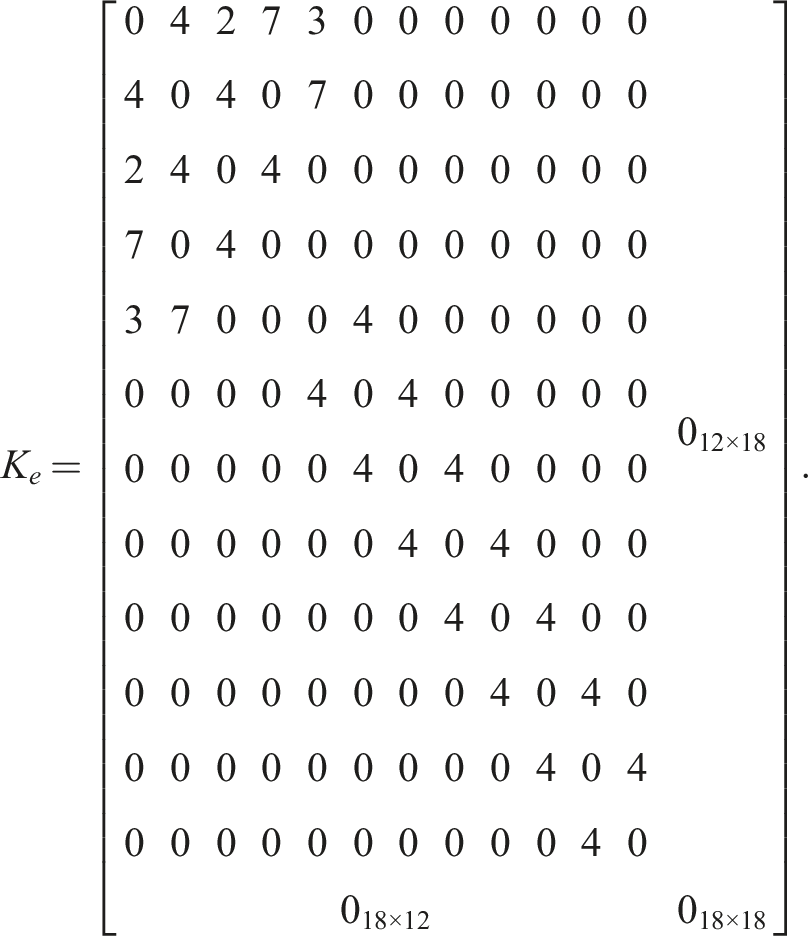
Suppose that matrices Me, Ge, and Ke are given by
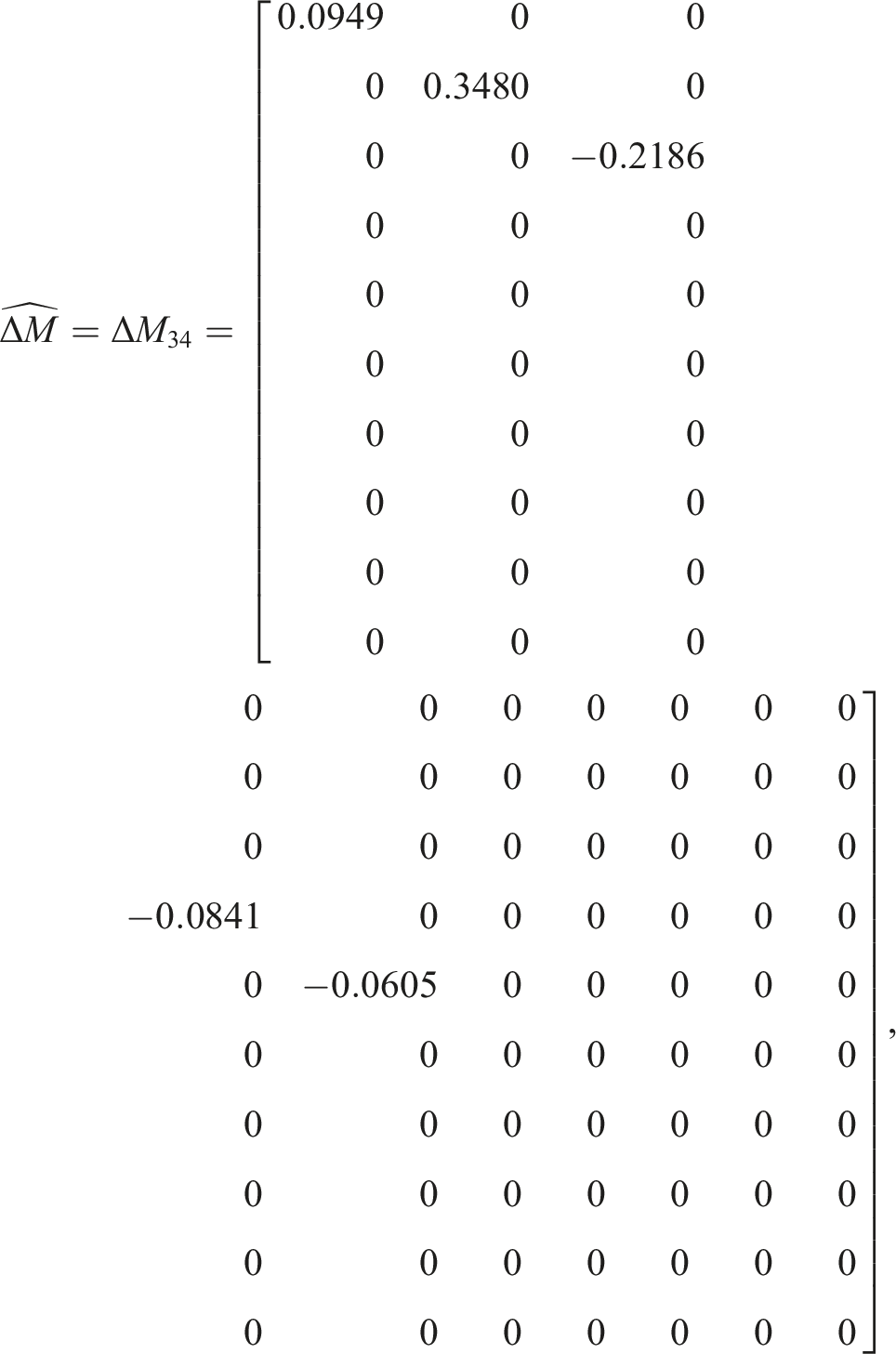
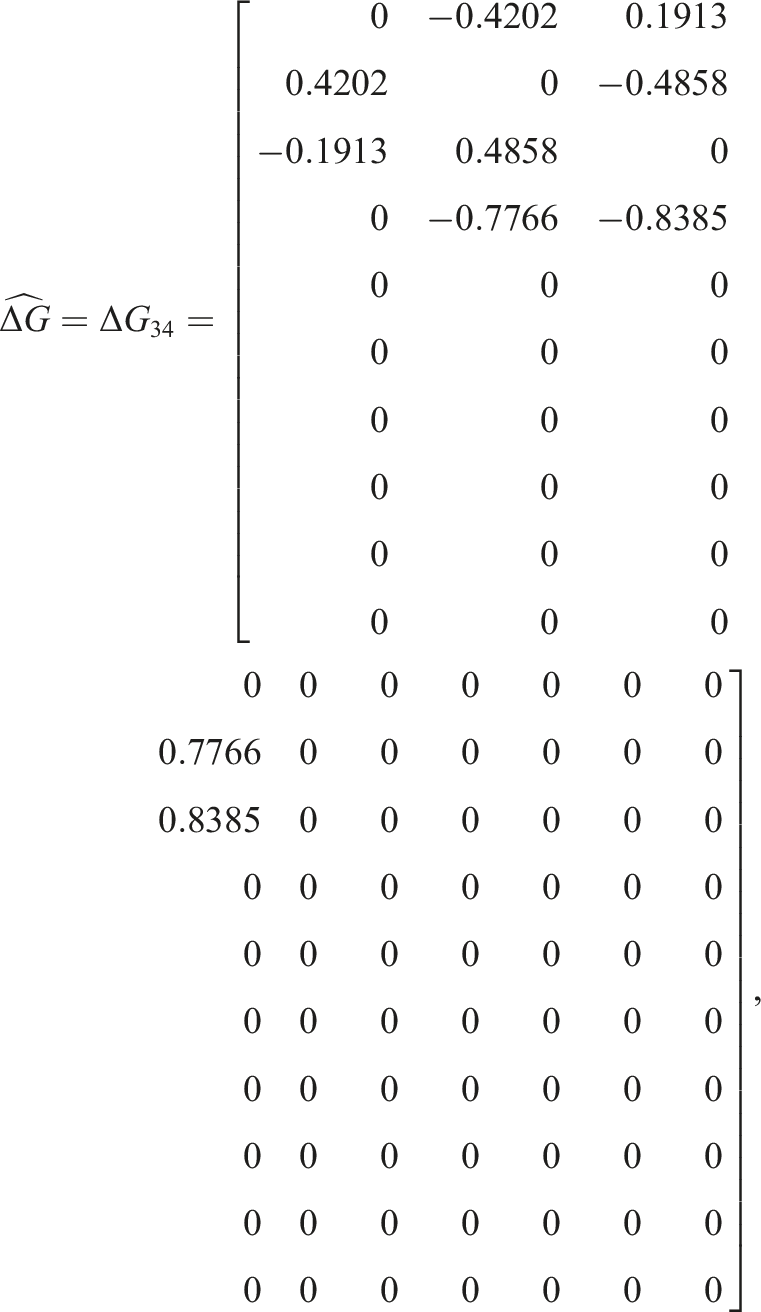
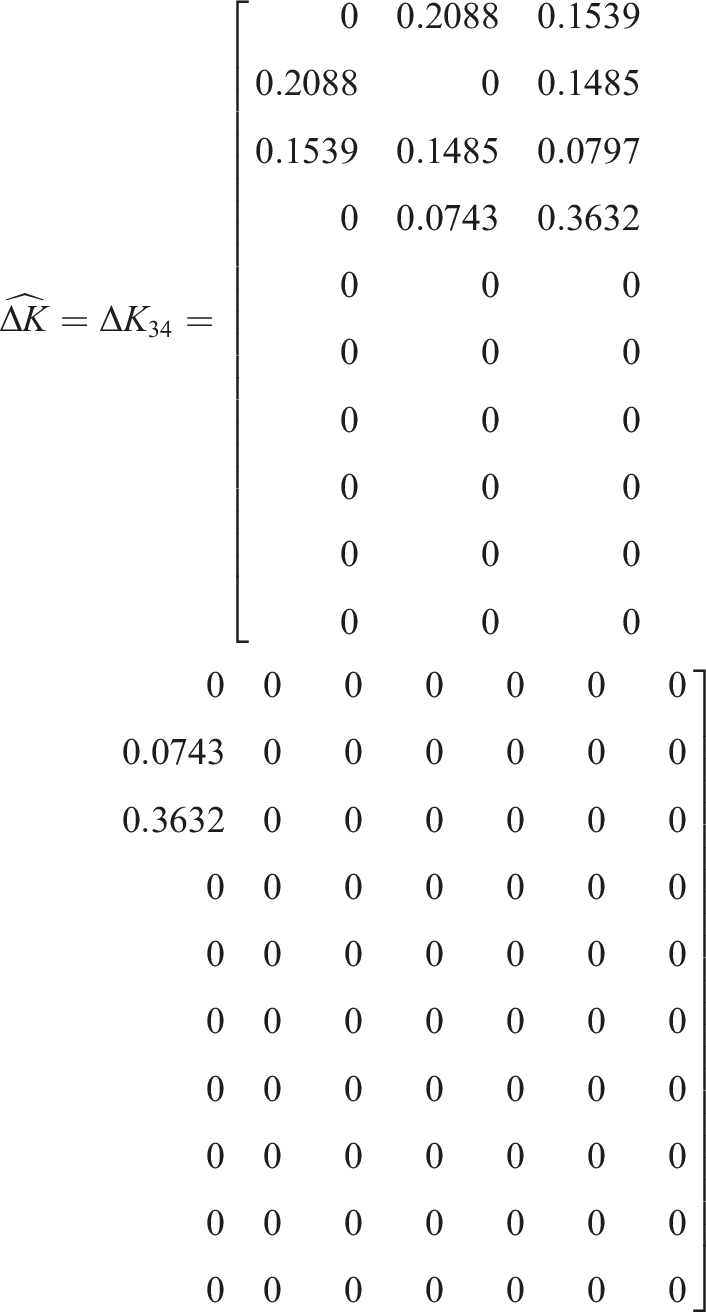
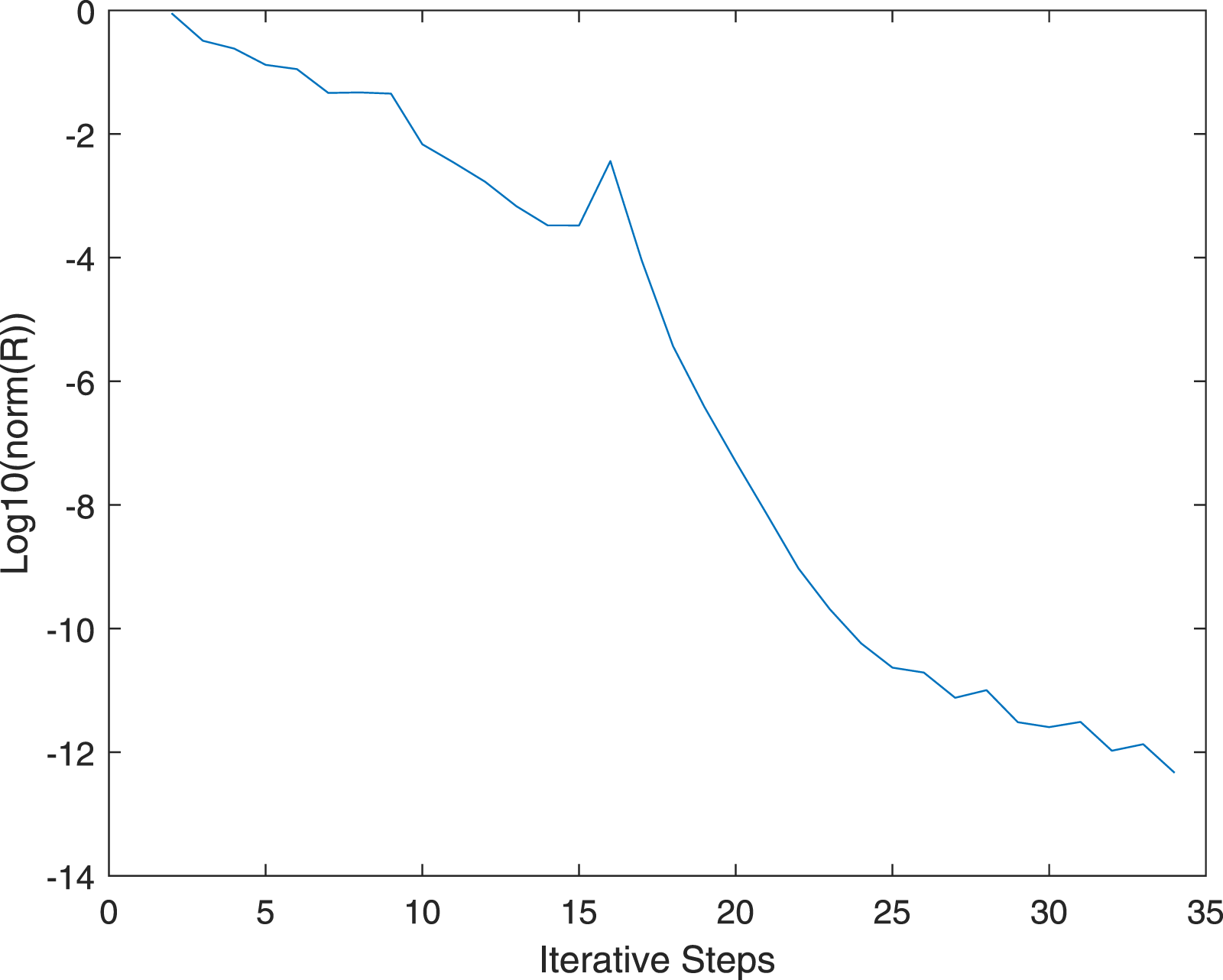
If we choose initial iterative matrices ΔM1 = 0, ΔG1 = 0, ΔK1 = 0, μ = ‖Ma‖/‖Ka‖ = 0.7254 and the tolerance ɛ = 1.0 × 10−12. Based on Algorithm 1, the variation of ‖Rs‖ with iteration step s is shown in Figure 2. After 33 iteration steps, we can obtain the MFNS of Eq. (21) as follows:
The variation of ‖Rs‖ with the iterative steps s.
with corresponding residual
where
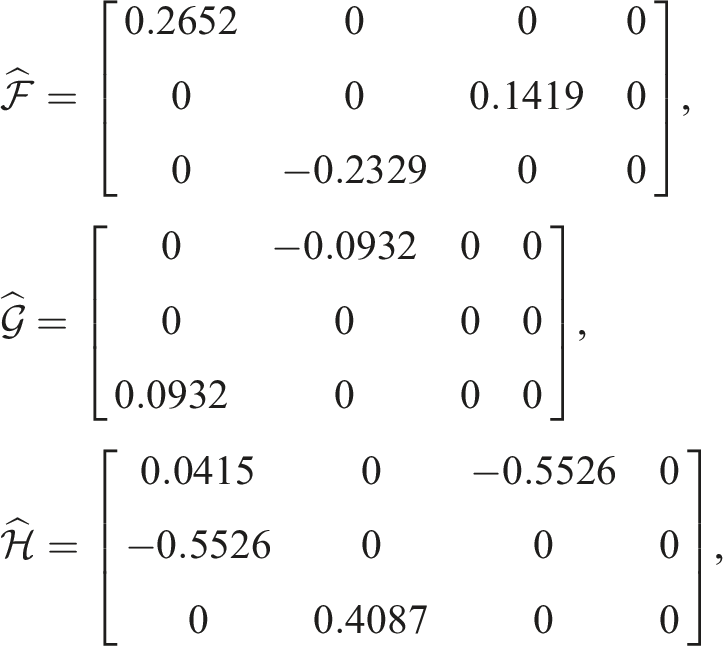
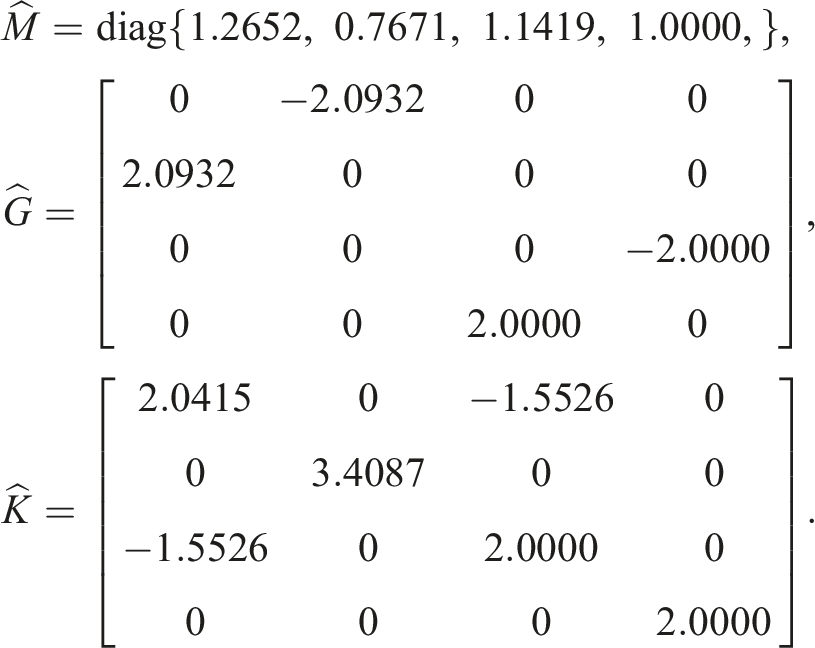
Therefore, by (24), the optimal updated matrices of Problems LMU and OA are,
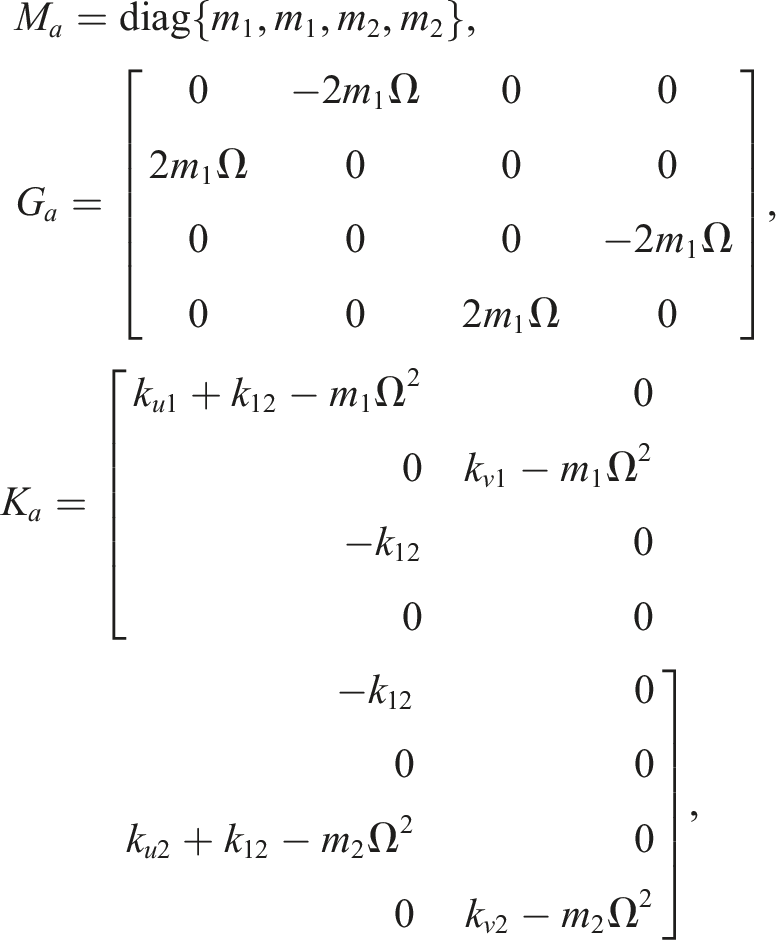
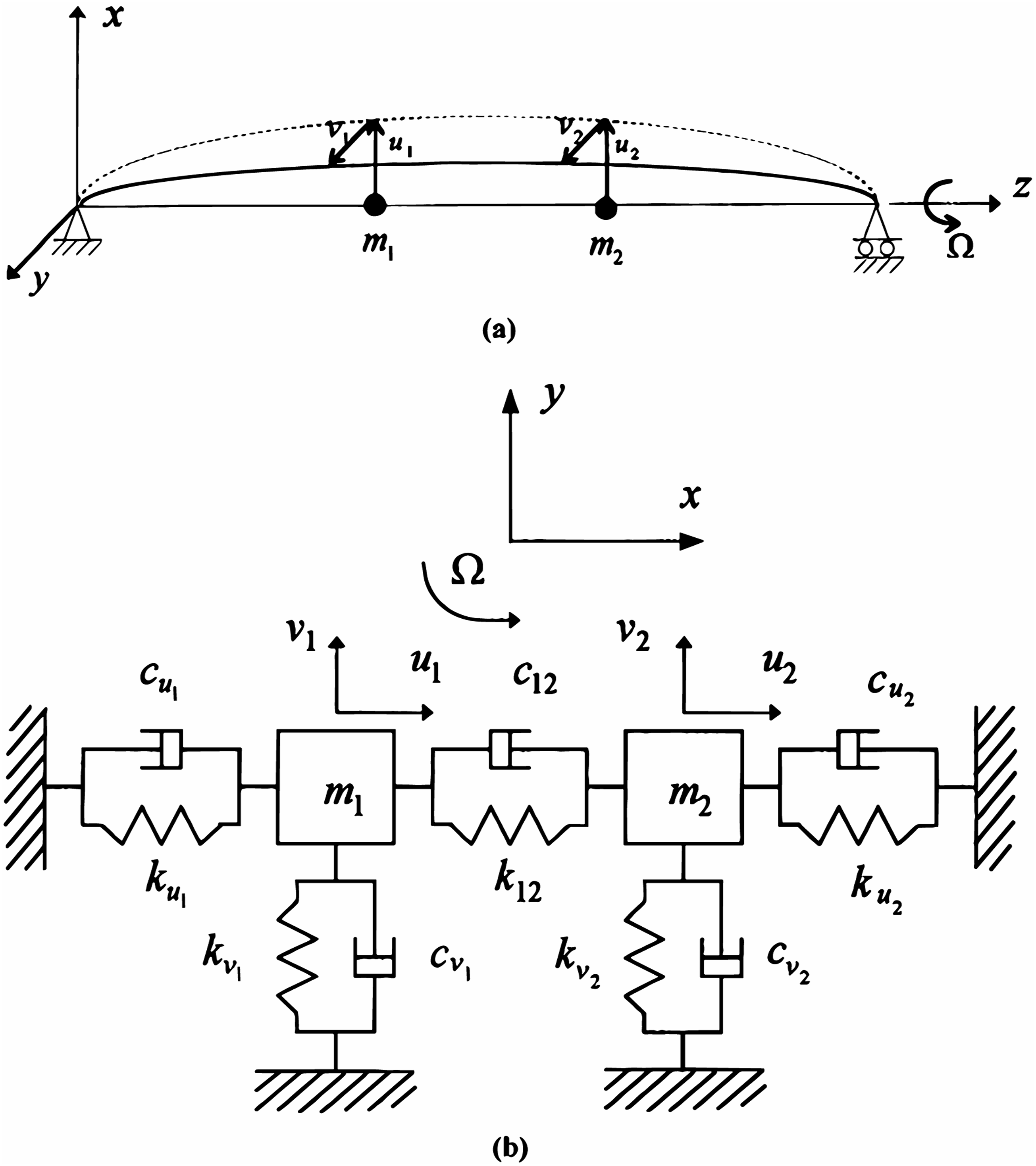
Example 2. Consider a system that is a rotating shaft with angular velocity Ω about the z axis, and it is simplified as a concentrated mass system (Zheng et al., 1997) (see Figure 3). The original coefficient matrices of the system are given by
where m1 = 1, m2 = 1, ku1 = 2, ku2 = 2, kv1 = 4, kv2 = 3, k12 = 1, cu1 = 0.2, cu2 = 0.2, cv1 = 0.3, cv2 = 0.1, c12 = 0.2 and Ω = 1. And the control feedback matrix B is given by
A rotating shaft simplified as a concentrated mass system.
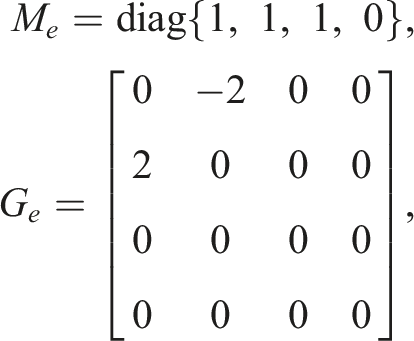
Suppose that matrices Me, Ge, and Ke are given by
The measured eigenvalue and eigenvector matrices Ψ and Y are given by
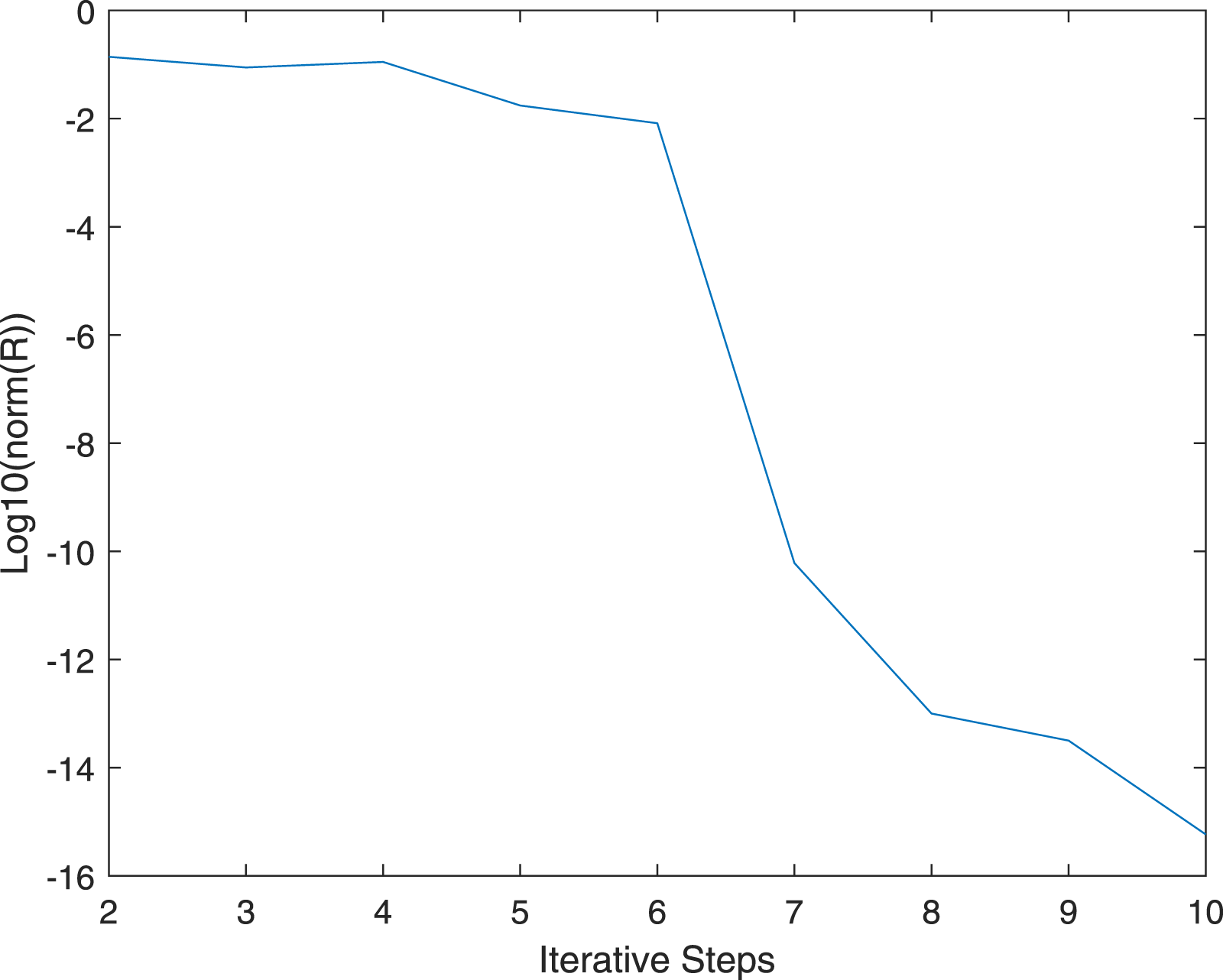
If we choose initial iterative matrices ΔM1 = 0, ΔG1 = 0, ΔK1 = 0, μ = ‖Ma‖/‖Ka‖ = 0.4170 and the tolerance ɛ = 1.0 × 10−14. Based on Algorithm 1, the variation of ‖Rs‖ with iteration step s is shown in Figure 4. After 9 iteration steps, we can obtain the MFNS of Eq. (21) as follows:
The variation of ‖Rs‖ with the iterative steps s.
with corresponding residual
where
Therefore, by (24), the optimal updated matrices of Problems LMU and OA are
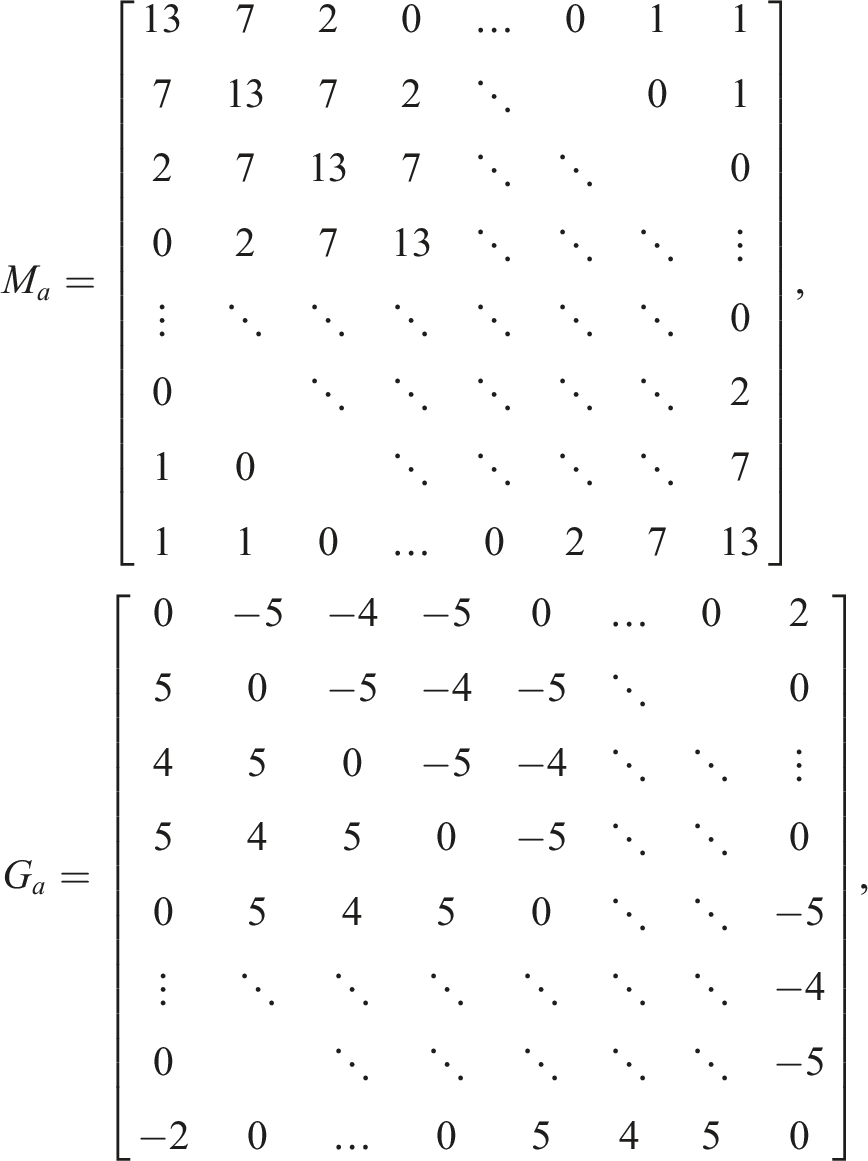
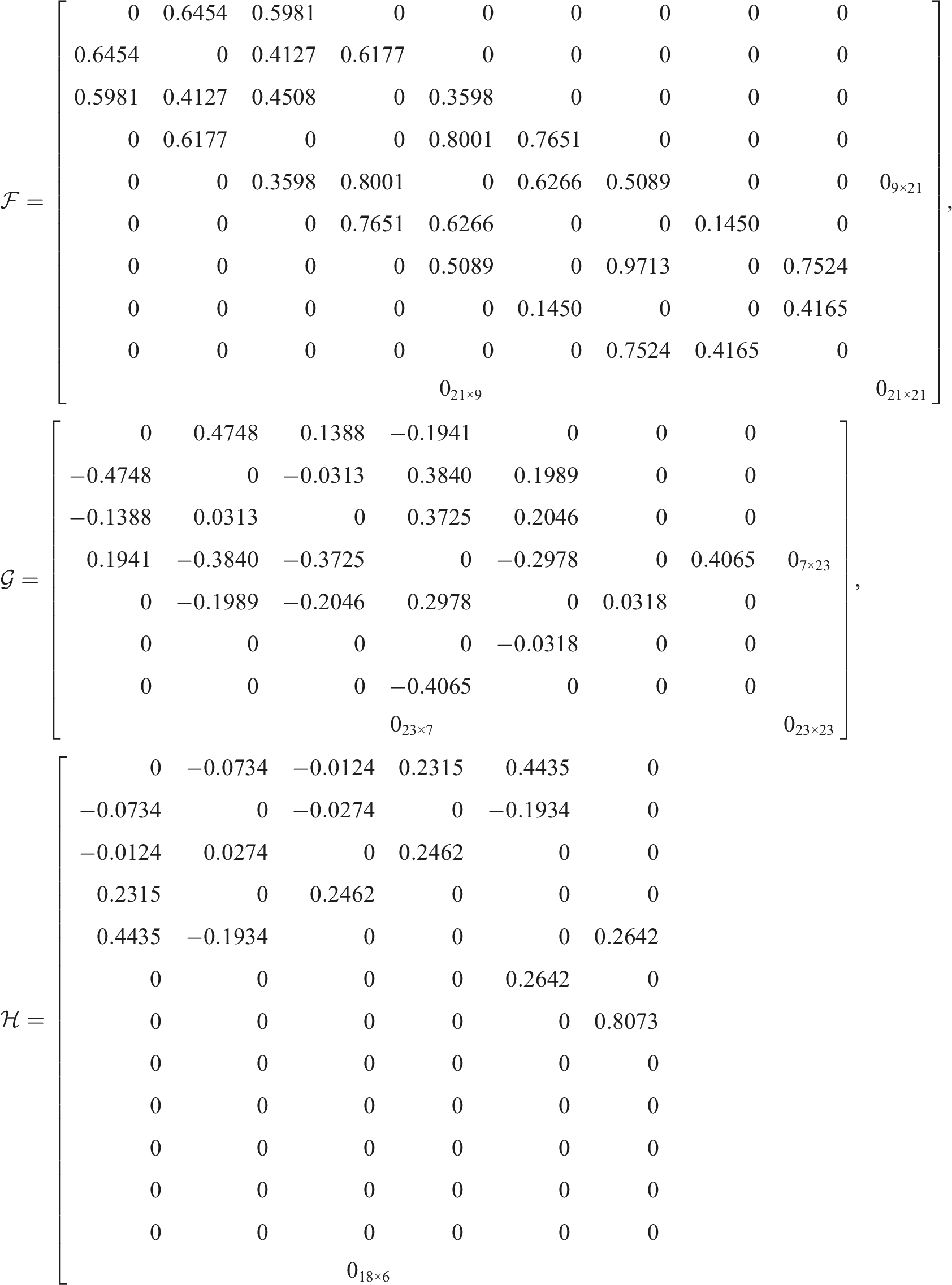
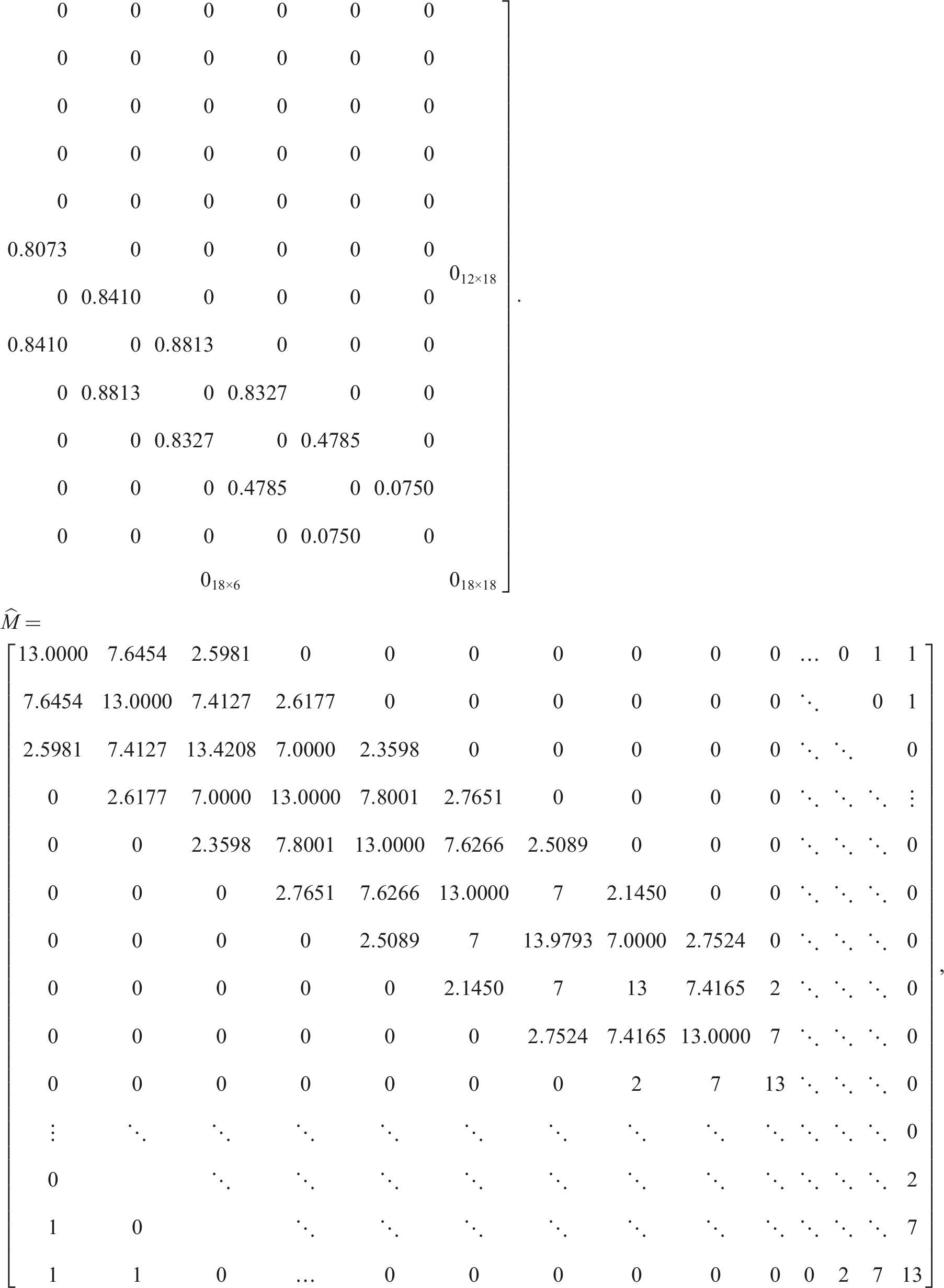
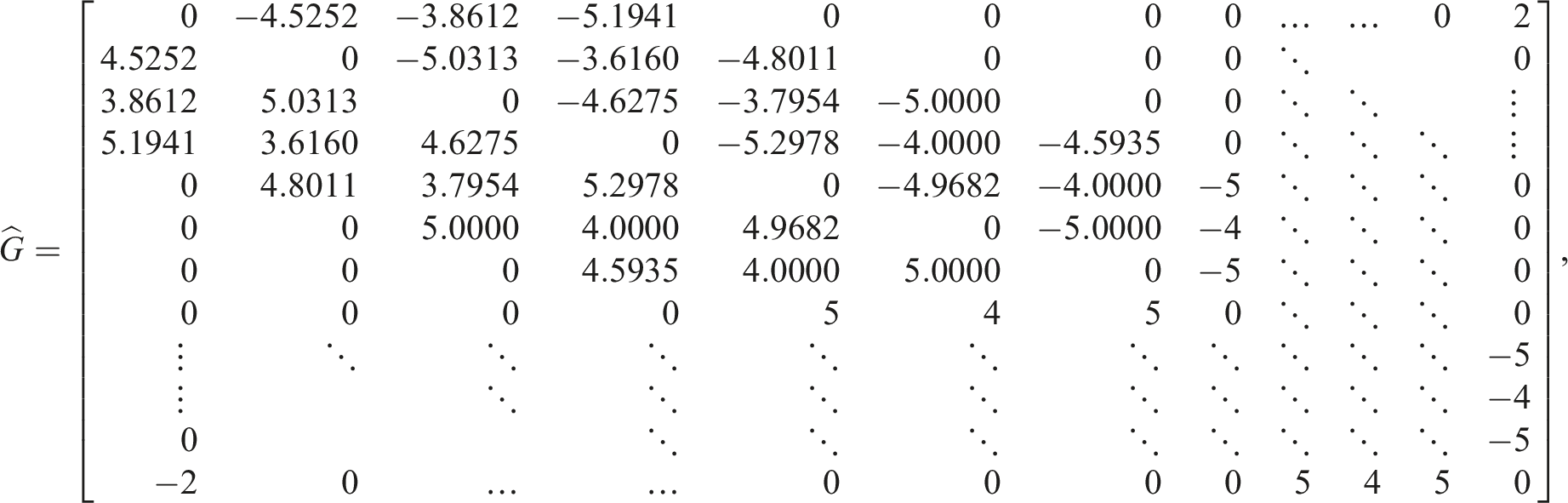
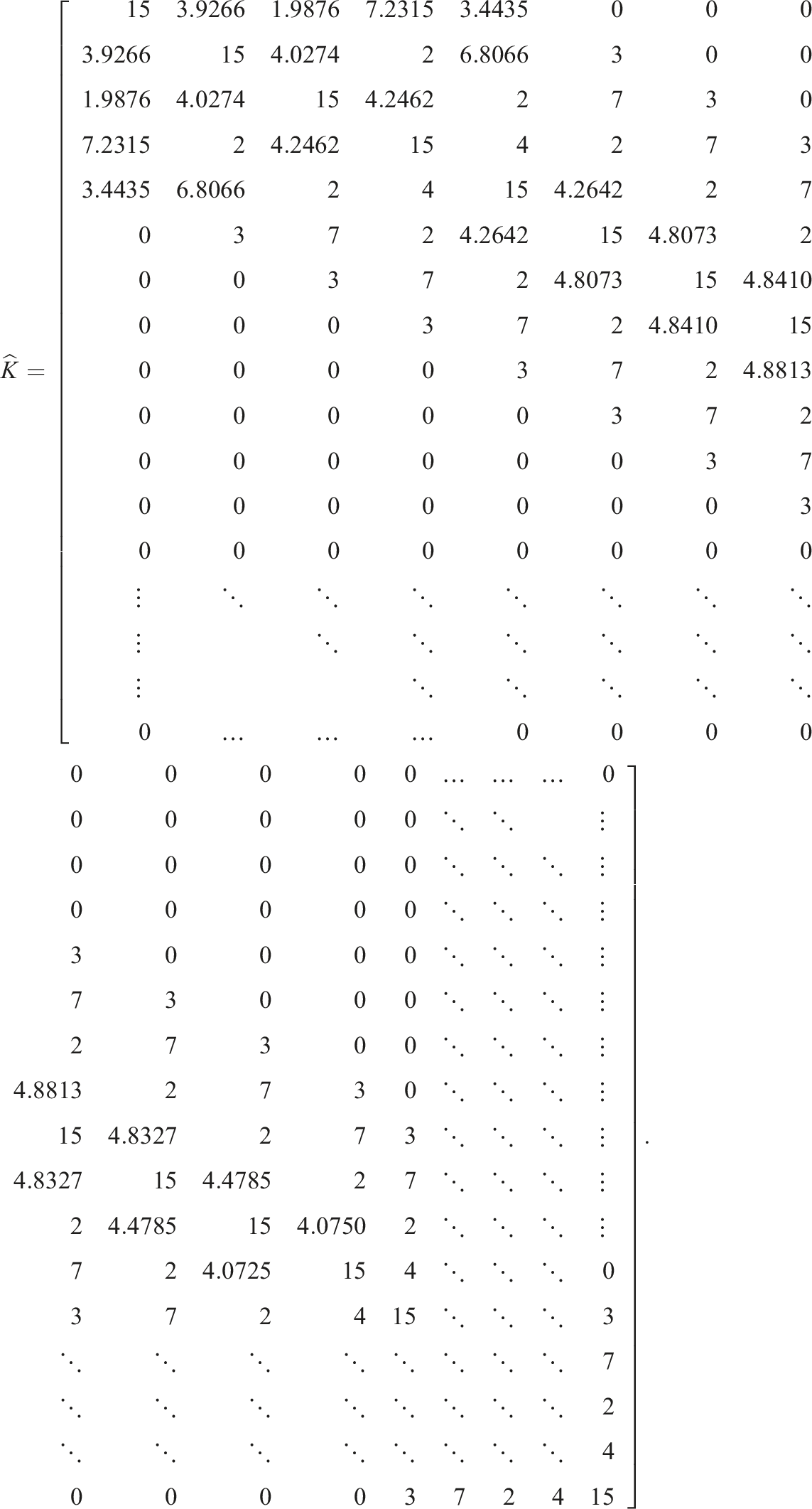
Example 3. (Ding and Liu, 2002) Consider a 30-DOF gyroscopic system with the coefficient matrices being given by
And the control feedback matrix B is given by
Suppose that matrices Me, Ge, and Ke are given by
Assume that the measured eigenvalue and eigenvector matrices Ψ and Y are given by
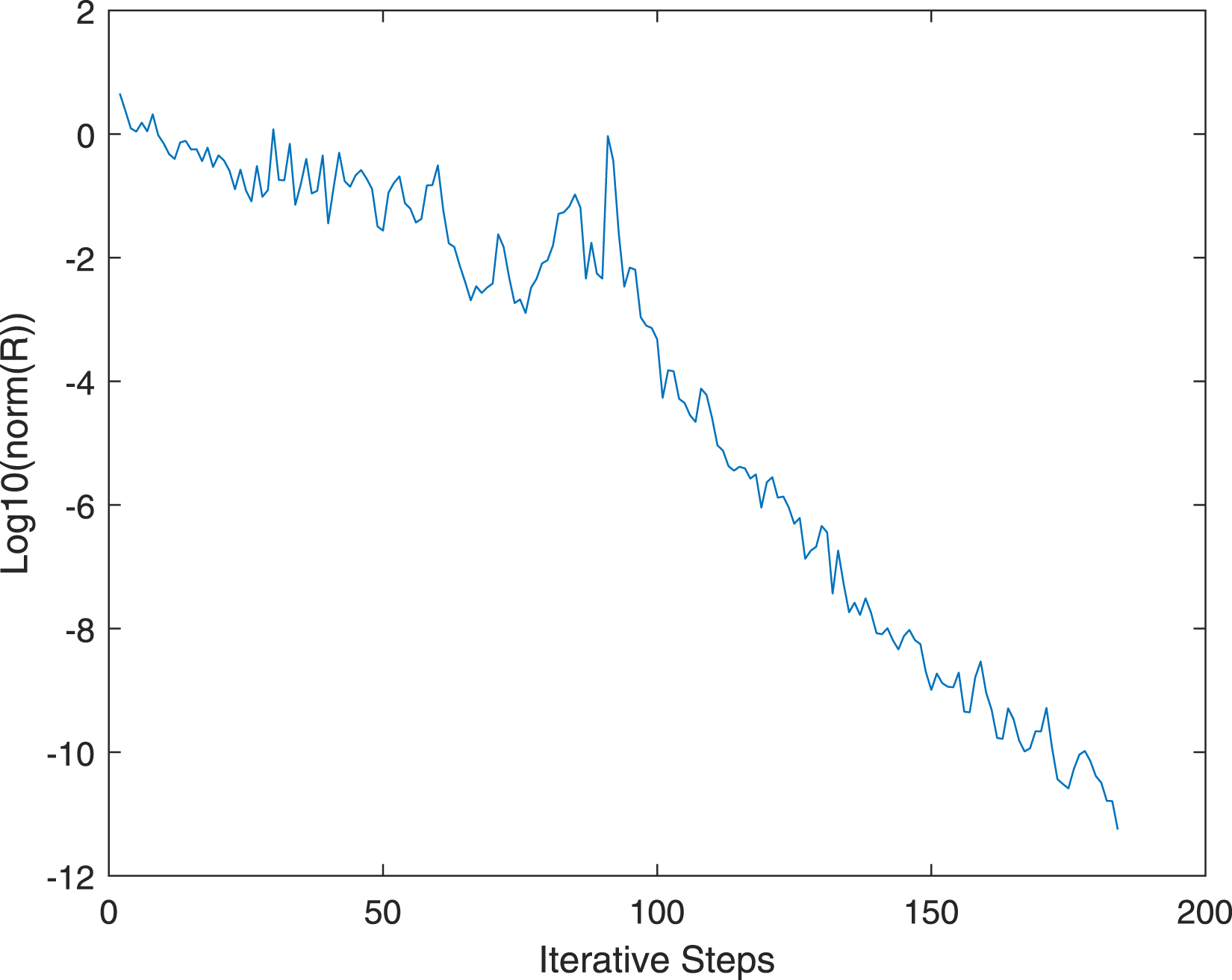
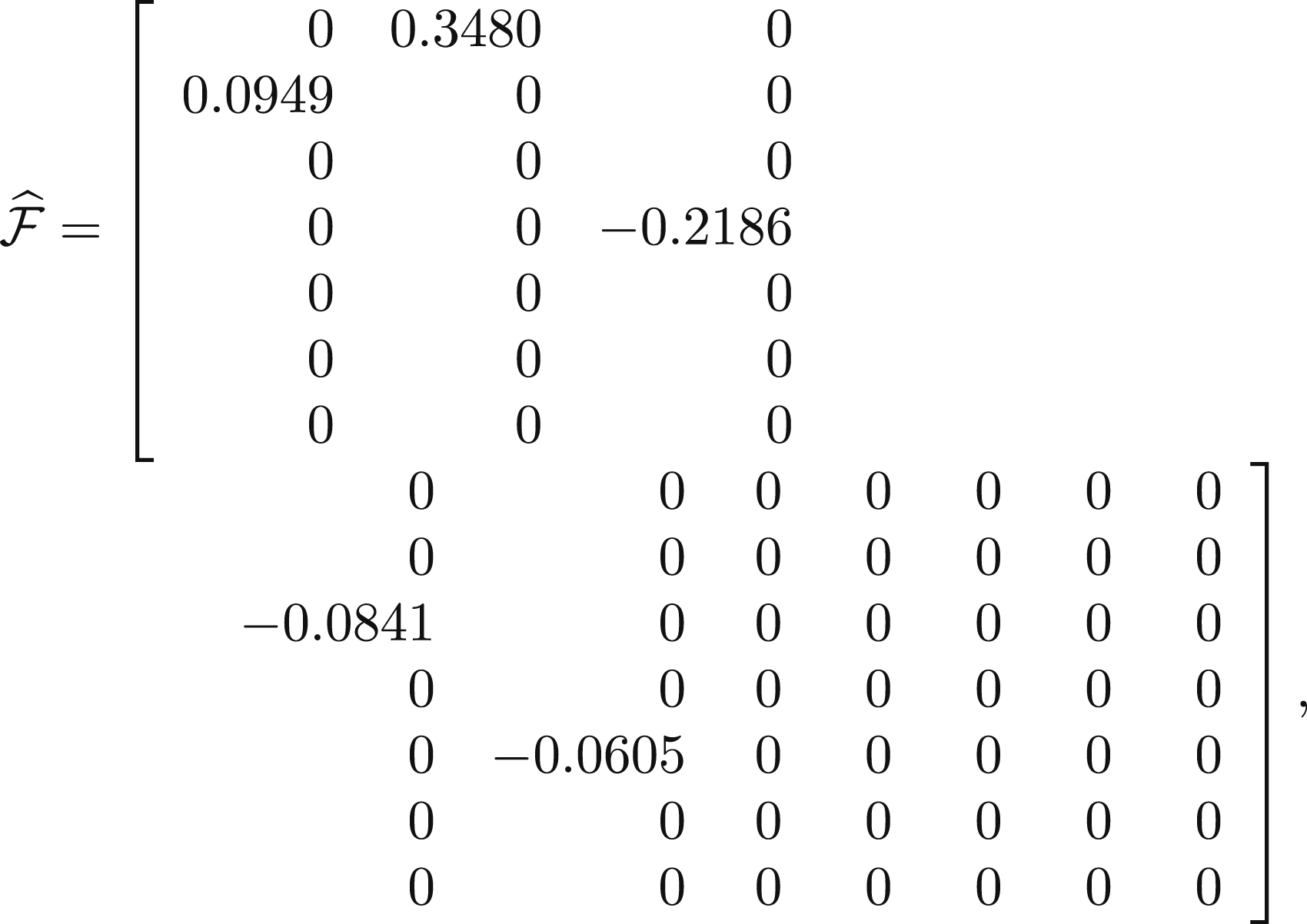
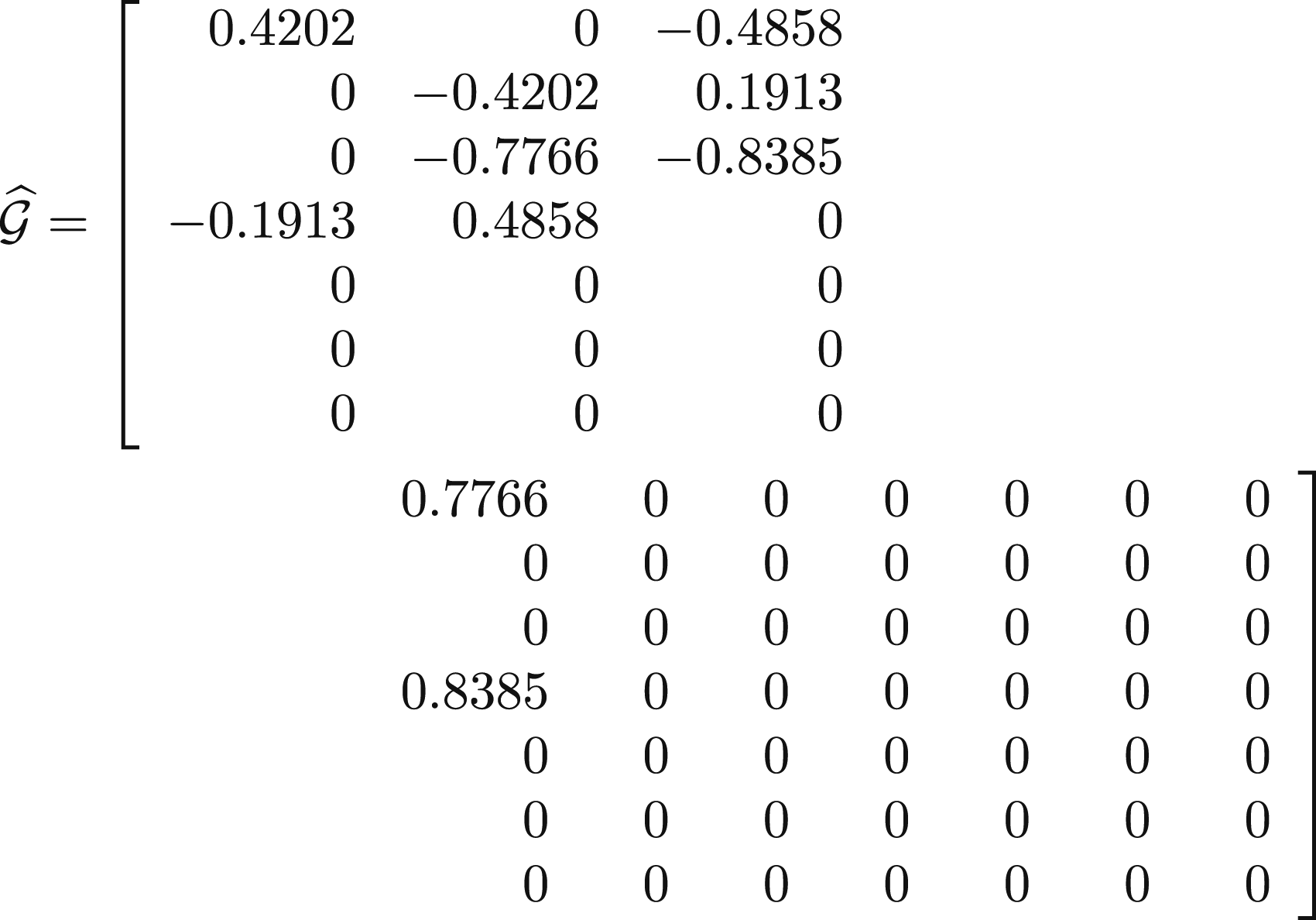
If we choose initial iterative matrices ΔM1 = 0, ΔG1 = 0, ΔK1 = 0, and the tolerance ɛ = 1.0 × 10−11. Based on Algorithm 1, the variation of ‖Rs‖ with iteration step s is shown in Figure 5. After 183 iteration steps, we can obtain the MFNS of Eq. (21) as follows:
The variation of ‖Rs‖ with the iterative steps s.
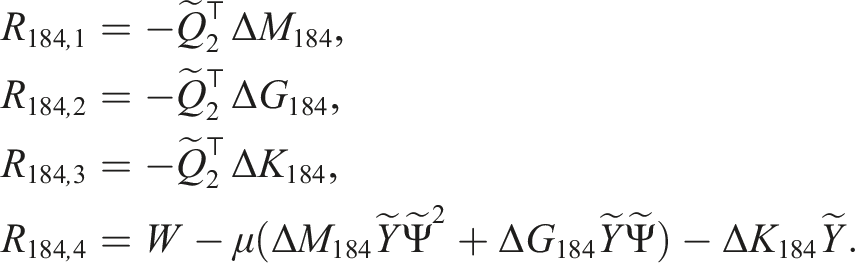
with corresponding residual
where
Therefore, by (24), the optimal updated matrices of Problems LMU and OA are
Remark 5. From the above three examples, it can be seen that by choosing appropriate initial matrices ΔM1, ΔG1, and ΔK1, a symmetric banded solution triplet can be obtained within no more than 3n2 − 3mn + np iteration steps.
Remark 6. It can be seen from the above examples that the matrices , , , , and have the same zero/nonzero patterns with Me, Ge, Ke, Ma, Ga, and Ka, respectively, which implies that symmetric sparse structures of the original model are preserved, and this correction process only updates inaccurate elements of the analytical MGSMs.
4. Conclusions
In vibration systems, the analytical matrices are usually adjusted globally, that is, GMU. However, engineering applications usually prefer to adjust only the elements with errors. So far, there has been no research that can simultaneously ensure the PC of the original model and locally correct the erroneous elements. This paper presents an iterative algorithm for LMU using AVDF. Notably, the method exclusively corrects erroneous elements in the analytical matrices while preserving correct elements unchanged, maintaining the original model’s sparsity pattern. Numerical examples verify the effectiveness of the proposed method.
Footnotes
ORCID iD
Zhanshan Wang
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China under Grants 61973070 and 62373089, and in part by the Synthetical Automation for Process Industries (SAPI) Fundamental Research Funds under Grant 2018ZCX22.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
The proof of Proposition 1
Proof. Since and . Thus, we just need to prove that
We prove this conclusion in two steps using the mathematical induction. First, we will prove that
For j = 1, by Algorithm 1, we have
Now, we suppose that (25) holds for j = l − 1. Further, for j = l, we can get
Therefore, (25) holds for j = l. Based on the mathematical induction, it can be concluded that (25) holds for all j. Then, we assume that
And we will prove that
In fact,
According to the results above, we obtain that . Further, we have
Hence, by applying the mathematical induction, Proposition 1 is proved.□
The proof of Proposition 2
Proof. We prove this proposition by the mathematical induction. First, for i = 1, we can get
Next, we assume that (23) holds for 1 ≤ i ≤ l − 1, then
□
The proof of Theorem 1
Proof. Assume that Rl ≠ 0, l = 1, 2, …, 3n2 − 3mn + np. By Proposition 2, we know Pl ≠ 0 or Ql ≠ 0 or El ≠ 0. Then, we can calculate that and by using Algorithm 1. Further, based on Proposition 1, we have
Thus, forms an orthogonal basis for the matrix space Ω, where
which implies that , namely, is a solution triplet of Eq. (21). This completes the proof. □
The proof of Theorem 2
Proof. Let
Clearly, L is a linear subspace. If we choose the initial matrix triplet (ΔM1, ΔG1, ΔK1) ∈ L, then, from Theorem 1, the solution of Eq. (21) can be obtained with finite iteration steps by utilizing Algorithm 1, that is, there are , and such that
We know that the solutions of (21) can be expressed as , where , , , and satisfy the following equations:
And since
Hence, and (N1, N2, N3) are orthogonal each other. Additionally,
this indicates that is the MFNS of (21). Further, we can get the optimal updated matrices of Problems LMU and OA, which are given by (24). □
References
1.
BaiZJChuDSunD (2011) A dual optimization approach to inverse quadratic eigenvalue problems with partial eigenstructure. SIAM Journal on Scientific Computing29: 2531–2561. https://doi.org/10.1137/060656346
2.
BansalSCheungSH (2017) A new stochastic simulation algorithm for updating robust reliability of linear structural dynamic systems subjected to future Gaussian excitations. Computer Methods in Applied Mechanics and Engineering326: 481–504. https://doi.org/10.1016/j.cma.2017.07.032
3.
Ben-IsraelAGrevilleTNE (2003) Generalized Inverses: Theory and Applications. Springer.
4.
BermanANagyEJ (1983) Improvement of a large analytical model using test data. American Institute of Aeronautics and Astronautics (AIAA) Journal21: 1168–1173. https://doi.org/10.2514/3.60140
5.
ChaPDSwitkesJP (2002) Enforcing structural connectivity to update damped systems using frequency response. American Institute of Aeronautics and Astronautics (AIAA) Journal40: 1197–1203. https://doi.org/10.2514/2.1771
6.
ChingJMutoMBeckJL (2006) Structural model updating and health monitoring with incomplete modal data using Gibbs sampler. Computer-Aided Civil and Infrastructure Engineering21: 242–257. https://doi.org/10.1111/j.1467-8667.2006.00432.x
7.
CobbRGLiebstBS (1997) Structural damage identification using assigned partial eigenstructure. American Institute of Aeronautics and Astronautics (AIAA) Journal35: 152–158.
8.
DattaBN (2002) Finite–element model updating, eigenstructure assignment and eigenvalue embedding techniques for vibrating systems. Mechanical Systems and Signal Processing16: 83–96. https://doi.org/10.1006/mssp.2001.1443
9.
DattaBNRamYMSarkissianDR (2000) Multi-input partial pole placement for distribued parameter gyroscopic systems. In Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, 5 December, 2000, pp. 4661–4665.
DingYYLiuH (2002) A method for updating damped gyroscopic systems by using output feedback control. Numerical Mathematics–A Journal of Chinese Universities44: 230–242.
12.
EreizSDuvnjakIJiménez-AlonsoJF (2022) Review of finite element model updating methods for structural applications. Structures41: 684–723. https://doi.org/10.1016/j.istruc.2022.05.041
13.
FarhatCHemezFM (1993) Updating finite element dynamic models using an element-by-element sensitivity methodology. American Institute of Aeronautics and Astronautics (AIAA) Journal31: 1702–1711. https://doi.org/10.2514/3.11833
14.
FarshadiMEsfandiariAVahediM (2017) Structural model updating using incomplete transfer function and modal data. Structural Control & Health Monitoring24: 1–13. https://doi.org/10.1002/stc.1932
15.
FriswellMIInmanDJPilkeyDF (1998) Direct updating of damping and stiffness matrices. American Institute of Aeronautics and Astronautics (AIAA) Journal36: 491–493. https://doi.org/10.2514/3.13851
16.
GhannadiPKourehliSS (2020) Multiverse optimizer for structural damage detection: numerical study and experimental validation. Structural Design of Tall and Special Buildings213: 1–27. https://doi.org/10.1002/tal.1777
17.
GhannadiPKourehliSS (2022) Efficiency of the slime mold algorithm for damage detection of large-scale structures. Structural Design of Tall and Special Buildings213: 1–36. https://doi.org/10.1002/tal.1967
18.
GhannadiPKourehliSSNooriM, et al. (2020) Efficiency of grey wolf optimization algorithm for damage detection of skeletal structures via expanded mode shapes. Advances in Structural Engineering213: 1–16. https://doi.org/10.1177/1369433220921000
19.
GhannadiPKhatirSKourehliSS, et al. (2023) Finite element model updating and damage identification using semi-rigidly connected frame element and optimization procedure: an experimental validation. Structures50: 1173–1190. https://doi.org/10.1016/j.istruc.2023.02.008
20.
GhannadiPKourehliSSNguyenA (2025) Experimental validation of an efficient strategy for FE model updating and damage identification in tubular structures. Nondestructive Testing and Evaluation40: 3424–3463. https://doi.org/10.1080/10589759.2024.2402887
21.
HeLReyndersEGarcía-PalaciosJH, et al. (2020) Wireless-Based identification and model updating of a skewed highway bridge for structural health monitoring. Applied Sciences10: 2347. https://doi.org/10.3390/app10072347
22.
HuSLJLiH (2007) Simultaneous mass, damping, and stiffness updating for dynamic systems. American Institute of Aeronautics and Astronautics (AIAA) Journal45: 2529–2537. https://doi.org/10.2514/1.28605
23.
JiaZWeiM (2011) A real-valued spectral decompostion of the undamped gyroscopic system with applications. SIAM Journal on Matrix Analysis and Applications32: 584–604. https://doi.org/10.1137/100792020
24.
KavehA (2014) Computational Structural Analysis and Finite Element Methods. Springer.
25.
KuoYCLinWWXuSF (2005) New model correcting method for quadratic eigenvalue problems using symmetric eigenstructure assignment. American Institute of Aeronautics and Astronautics (AIAA) Journal43: 2593–2598. https://doi.org/10.2514/1.16258
26.
KuoYCLinWWXuSF (2006) New methods for finite element model updating problems. American Institute of Aeronautics and Astronautics (AIAA) Journal44: 1310–1316. https://doi.org/10.2514/1.15654
27.
LinCS (1990) Location of modeling errors using modal test data. American Institute of Aeronautics and Astronautics (AIAA) Journal28: 1650–1654. https://doi.org/10.2514/3.25264
28.
LiuHLiRDingY (2020) Partial eigenvalue assignment for gyroscopic second–order systems with time delay. Mathematics8: 1235. https://doi.org/10.3390/math8081235
29.
López-DíezJMarco-GómezVLuengoP (1999) Modal effective mass applied to error localization of finite element models. 40th Structures, Structural Dynamics, and Materials Conference and Exhibit, St. Louis, MO, U.S.A. 1999, pp. 970–977.
MinasCInmanDJ (1987) Correcting finite element models with measured modal results using eigenstructure assignment methods. Proceedings of the 4th IMAC Conference, Union College, Schenectady, NY, 1987, pp. 583–587.
32.
MinasCInmanDJ (1990) Matching finite element models to modal data. Transactions of the ASME, Journal of Vibration and Acoustics112: 84–92. https://doi.org/10.1115/1.2930103
33.
RenWChenH (2010) Finite element model updating in structural dynamics by using the response surface method. Engineering Structures32: 2455–2465. https://doi.org/10.1016/j.engstruct.2010.04.019
34.
SehgalSKumarH (2016) Structural dynamic model updating techniques: a state of the art review. Archives of Computational Methods in Engineering23: 515–533. https://doi.org/10.1007/s11831-015-9150-3
35.
SunLLiYZhangW (2020) Experimental study on continuous bridge-deflection estimation through inclination and strain. Journal of Bridge Engineering25: 04020020. https://doi.org/10.1061/(asce)be.1943-5592.0001543
36.
SundarVSManoharCS (2013) Time variant reliability model updating in instrumented dynamical systems based on Girsanov’s transformation. International Journal of Non-Linear Mechanics52: 32–40. https://doi.org/10.1016/j.ijnonlinmec.2013.02.002
37.
WahlbergBLjungL (1992) Hard frequency-domain model error bounds from least-squares like identification techniques. IEEE Transactions on Automatic Control37: 900–912. https://doi.org/10.1109/9.148343
XieH (1999) Sensitivity Analysis of Eigenvalue Problem. PhD Thesis. Nanjing University of Aeronautics and Astronautics, CN (in Chinese).
40.
XuJYuanY (2022) A direct method for updating mass and stiffness matrices with submatrix constraints. Linear and Multilinear Algebra70: 4266–4281. https://doi.org/10.1080/03081087.2021.1874263
41.
YeXChenB (2019) Model updating and variability analysis of modal parameters for super high-rise structure. Concurrency and Computation Practice & Experience31: 1–11. https://doi.org/10.1002/cpe.4712
42.
YinTJiangQHYuenKV (2017) Vibration-based damage detection for structural connections using incomplete modal data by Bayesian approach and model reduction technique. Engineering Structures132: 260–277. https://doi.org/10.1016/j.engstruct.2016.11.035
43.
YuanY (2008) A model updating method for undamped structural systems. Journal of Computational and Applied Mathematics219: 294–301. https://doi.org/10.1016/j.cam.2007.07.025
44.
YuanYDaiH (2008) The nearness problems for symmetric matrix with a submatrix constraint. Journal of Computational and Applied Mathematics213: 224–231. https://doi.org/10.1016/j.cam.2007.01.033
45.
YuanYLiuH (2011) An iterative method for solving finite element model updating problems. Applied Mathematical Modelling35: 848–858. https://doi.org/10.1016/j.apm.2010.07.040
YuanYLiuH (2014) An iterative updating method for damped structural systems using symmetric eigenstructure assignment. Journal of Computational and Applied Mathematics256: 268–277. https://doi.org/10.1016/j.cam.2013.07.047
48.
YuanYZhaoWLiuH (2016) Analytical dynamic model modification using acceleration and displacement feedback. Applied Mathematical Modelling40: 9584–9593. https://doi.org/10.1016/j.apm.2016.06.014
49.
ZengMYuanY (2023) Sparse structure preserving finite element model updating problem for gyroscopic systems. Mechanical Systems and Signal Processing203: 110734. https://doi.org/10.1016/j.ymssp.2023.110734
50.
ZhangHYuanY (2020) Model updating for undamped gyroscopic systems with connectivity constraints. Mathematical and Computer Modelling of Dynamical Systems26: 434–452. https://doi.org/10.1080/13873954.2020.1787459
51.
ZhengZCRenGXWilliamsFW (1997) The eigenvalue problem for damped gyroscopic systems. International Journal of Mechanical Sciences39: 741–750. https://doi.org/10.1016/s0020-7403(96)00072-0
52.
ZimmermanDCWidengrenM (1990) Correcting finite element models using a symmetric eigenstructure assignment technique. American Institute of Aeronautics and Astronautics (AIAA) Journal28: 1670–1676. https://doi.org/10.2514/3.25267




























 .
.

 ,
,