
Abstract
This paper addresses the prescribed-instant consensus (PSIC) tracking problem of the leader-follower high-order multi-agent systems (MASs). Both cases of directed graphs and undirected connected graphs are considered. A Lyapunov-based sufficient condition for prescribed-instant stability of general single-loop systems is proposed. Based on the backstepping method, distributed control approaches are proposed to ensure consensus at the prescribed time instant. Consensus analyses are provided on the basis of Lyapunov stability theory and algebraic graph theory. Two numerical simulations are carried out which illustrates the validity of the proposed methods at the end.
1. Introduction
Over the past few decades, there has been significant research into the coordination control of MASs, driven by its broad potential applications such as in the optimal leader allocation of autonomous vehicles (Richert and Cortés, 2013), the formation control of spacecraft (Wang et al., 2019a), and local path planning of multi-robots (Xu et al., 2015). The consensus problem in MASs is the most fundamental issue, which refers to the fact that by designing a control protocol relying on the exchange of local data, all agents can reach an agreement under specified conditions (Pei and Liang, 2025; Shahvali et al., 2018; Shahvali and Shojaei, 2016).
In the consensus problem, the settling time has consistently been a central focus, because the faster convergence rate usually leads to the better system performance (Karimoddini et al., 2013). Since finite-time stability method was formally introduced in Orlov (2004), it has been widely applied to MASs, yielding many fruitful results concerning the finite-time consensus of the MASs in Zhao et al. (2013); Shahvali and Askari (2016); Shahvali et al. (2018b); and Pei (2023). How quickly finite-time consensus is achieved depends on the initial states of the agents, which poses a challenge in determining it if these states are unknown initially (Cao and Ren, 2011). Additionally, the actual settling time will increase as the difference of the initial states becomes larger (Ni et al., 2021). Polyakov (2011) presented a groundbreaking theory of fixed-time stability to resolve this issue. Soon it was applied to MASs, which ensures that the settling time is a constant irrespective of the initial states. This not only simplifies the estimation of the settling time but also streamlines the design of control protocols. It should be emphasized that the estimated boundary is generally much larger than the actual settling time.
To resolve the concern, a concept referred to as prescribed/predefined-time stability was presented in the literature. A key characteristic is that neither initial states nor other parameters exert an influence on the settling time, which can thus be set in advance. This method has been widely utilized in numerous studies on the consensus issue of MASs because of this benefit. For example, in Wang et al. (2019b), a kind of prescribed-time distributed control approach based on the time-scaling function was proposed for MASs. What’s more, a predefined-time consensus tracking method based on a distributed observer was provided for the second-order MASs in Ni et al. (2021). Using a novel nonsingular terminal sliding mode surface and distributed observer, the method enabled the followers to track the leader within the predefined time. For the first-order MASs, Chen et al. (2022) introduced a prescribed-time event-triggered control scheme, making use of the time-varying scaling functions. By constructing control laws and triggering conditions that eliminate the need for continuous neighborhood communication, this scheme ensured bipartite consensus within the prescribed time. The challenge of obtaining leader-following consensus within a prescribed time in input-constrained linear MASs under generally directed graphs was addressed in Zhang et al. (2024), where a bounded linear time-varying control protocol was designed based on the parametric Lyapunov equation. However, the above articles focused on ensuring consensus before the prescribed/predefined time, without attempting to specify the precise moment when the consensus is achieved.
Most recently, the notion of prescribed-instant stability (PSIS) was first put forward in Kuang et al. (2023), in that a precise value of the settling time was obtained rather than its upper bound. Moreover, based on the Lyapunov method and backstepping technique, a control strategy for high-order integrator systems was presented in Kuang et al. (2024), which achieved precise convergence of the system at an arbitrarily specified time designated by the user. But it’s worth noting that research on the prescribed-instant stability of dynamical systems is just emerging, and there is still a lot of work to be extended and improved. For the high-order MASs under undirected graphs, Gu et al. (2023) successfully solved the problem of the prescribed-instant leaderless consensus. In Kuang et al. (2022), a prescribed-instant containment control scheme was developed for the first-order MASs under directed graphs. However, research on prescribed-instant consensus tracking for leader-follower high-order multi-agent systems (MASs) remains relatively scarce, despite the fact that this methodology is applicable to scenarios requiring strictly time-fixed convergence with high precision and reliability, such as coordinated aerial refueling of UAVs and simultaneous target interception by multi-robot teams.
Motivated by the aforementioned discussions, for the high-order MASs under directed graphs we will further study the prescribed-instant consensus tracking problem and extend it to undirected graphs. The primary contributions of this paper are outlined as follows: (1) In order to solve the prescribed-instant consensus tracking problems, a distributed control strategy is presented based on the backstepping method. (2) Different from the undirected connected graphs considered in Gu et al. (2023), we consider both undirected connected graphs and directed ones containing a spanning tree. The latter one is more general, and the corresponding analysis is more challenging. (3) A general sufficient condition for prescribed-instant stability is provided, which not only plays a role in the prescribed-instant consensus analysis in this paper but also can be employed in corresponding problems in other systems.
The rest of this paper is structured as follows: Essential preliminaries, including graph theory, problem formulation, and key definitions for prescribed-instant consensus, are introduced in Section II. Section III presents the main theoretical contributions, encompassing the design of distributed controllers and the rigorous Lyapunov-based stability analysis. The simulated numerical results are given in Section IV. In the end, a summary of the main results is provided in Section V.
2. Preliminaries
2.1. Graph theory
Consider an undirected graph G = {V, E, A}. In this graph, V = {v1, …, v
n
} denotes the vertex set, E ⊆ V × V represents the edge set, and
Compared with the undirected graph, node pairs in the directed graph are ordered. For example, the edge (v
i
, v
j
) indicates that the i-th agent is able to directly transmit information to the j-th agent, but the opposite direction is not assured. Let
In the leader-follower MASs, an extended graph

(Royle and Godsil, 2001): The Laplacian matrix L of an undirected connected graph G is positive semi-definite, and its eigenvalues can be reordered as 0 = λ1(L) < λ2(L) ≤ ⋯ ≤ λ
N
(L).
(Ren and Beard, 2008): A directed graph G = {V, E, A} contains a rooted spanning tree only if there exists at least one vertex in V from which a directed path extends to every other vertex in V.
(Li et al., 2014): If
2.2. Problem statement
We focus on a MASs that comprises a leader and N followers. For the i-th follower (i = 1, …, N), its dynamic model is defined by


The leader’s input is restricted, which means there is a positive constant λ ∈
(Kuang et al., 2023): Consider a system described as
For any initial states x (t0) ∈
Based on the above definition of prescribed-instant stability, we aim to study the prescribed-instant consensus (PSIC) tracking problem for the leader-follower high-order MASs. Specifically, by designing distributed control inputs u
i
, the states of the followers
3. Main results
With the goal of solving the prescribed-instant consensus tracking problem, we first introduce a kind of time-varying function ϖ(t), which possesses the following properties. (1) ϖ(t0) > 0, where t0 ≥ 0 denotes the initial time; (2) ϖ(t) is continuous, monotonically increasing, and differentiable on the interval [t0, t
f
) where t
f
is the prescribed time instant; for t ∈ [t
f
, ∞), ϖ(t) maintains a constant value and (3) For any q > 0, ϖ(t)−q is monotonically decreasing with t ∈ [t0, t
f
) and
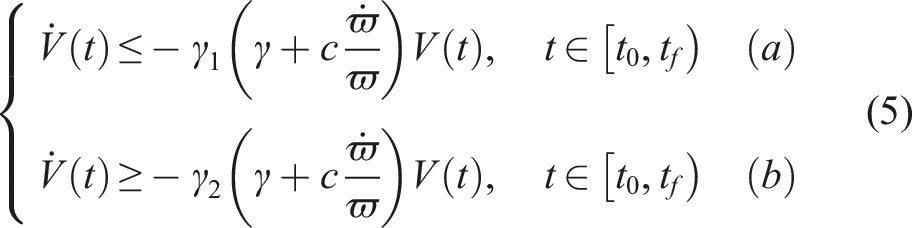

For system (4), if a differentiable positive definite function V(t) exists that satisfies the following condition
From (5) (a), it is straightforward to deduce that
Similarly, by solving the differential inequality (5) (b), we can obtain
Combining the above two conclusions, we can know that V(t) approaches zero at t
f
, which implies that x(t) achieves the origin at t
f
. Furthermore, from (6), we have that
3.1. PSIC of high-order MASs under directed graphs
In the following, we suppose that the augmented graphs
Before presenting the detailed results, we first provide the definitions of some variables. For the MASs dynamics (2) and (3), define the tracking errors as
Since the followers have the ability to obtain both their own states and the states of their neighbors, we define the first-order consensus error zi,1 for each follower as

Substituting (7) into (9), we obtain
Denote
The backstepping method consists of n steps in total. At each step, we will determine φ
id
to ensure that x
i
can track φ
id
at the prescribed time instant. After completing all n steps, the prescribed-instant consensus of the high-order MASs will be achieved. Step 1: Let V1 be the defined Lyapunov function

It should be noted that the virtual input φ2d in this case does not represent the actual controller itself but serves as an intermediate variable in the design process, which will ultimately be translated into the actual controller. Step 2: The objective of this step is to design φ3d, ensuring the real state x2 tracks the virtual input φ2d at the prescribed time instant. Define the candidate Lyapunov function as

Its derivative is
Choose the virtual input φ3d as

Furthermore, it leads to
Step i (i = 2, 3, …, n-1): Choose the following candidate Lyapunov function

The derivative of it is derived as
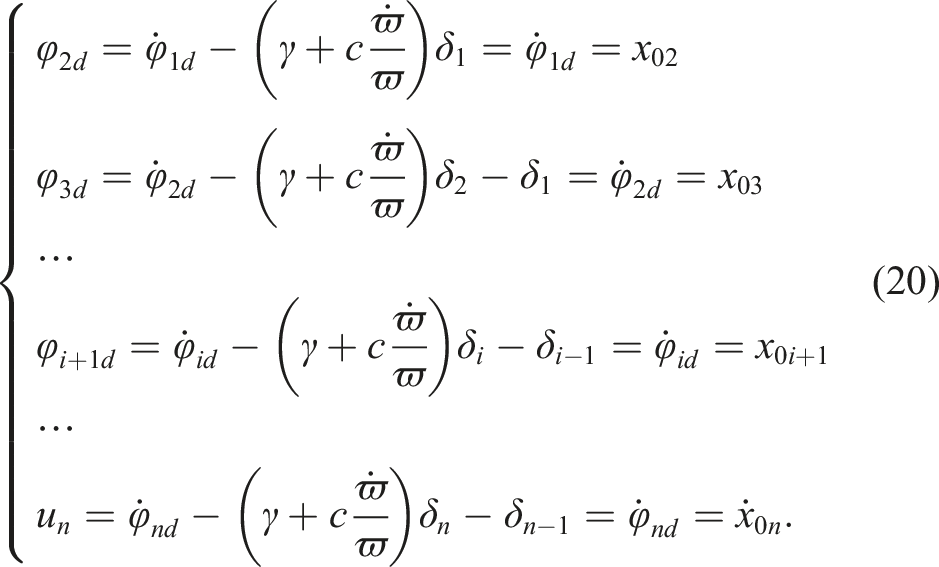
The virtual input φi+1d is selected as

Taking φ
id
into Step n: The candidate Lyapunov function is defined as

Its derivative is
Following the recursive backstepping analysis discussed above, the subsequent theorem will be further presented.

Under directed graphs containing a spanning tree with the leader as the root node, for the multiple follower systems (2) and the leader system (3), if the control input of the i-th agent is designed as

Based on (15), the control input u
n
can be written as
Substituting u
n
into

From the above analysis, P are positive definite matrices. Therefore, that it leads to
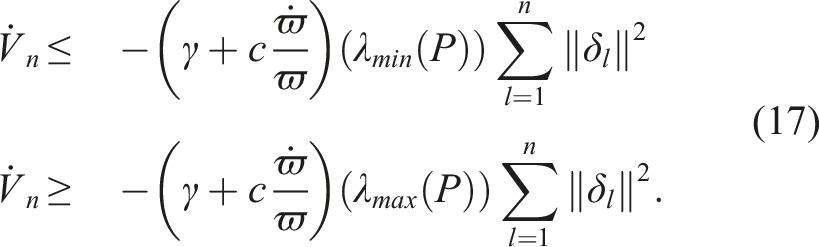
Denote

Because of


From Lemma 3, we can get the conclusion that V
n
will converge to zero at t
f
. Then, we will get z1 = δ
i
=
Furthermore, because the tracking errors equal to zero at t
f
, we can infer that
As a result, the consensus tracking is reached at the prescribed time instant t f . In addition, according to the tracking errors δ1 = 0, the first-order consensus error z1 = (L + B)δ1 = 0 at the prescribed time instant t f .
When t ∈ [t
f
, ∞), following similar analyses as above and considering

Because V(t) is a continuous function and V (t
f
) = 0, it follows that

From (15) and the expressions of each virtual control input, the control input for every agent is determined solely by its own states and the states of its neighboring agents, thereby eliminating the need for any global information. Therefore, the method introduced in this paper is a fully distributed control approach.
Kuang et al. (2022) investigated the prescribed-instant consensus for first-order multi-agent systems. In contrast, the paper proposes a controller via the backstepping method to solve the prescribed-instant consensus problem of leader-following high-order multi-agent systems under directed graphs. By comparison, the result proposed in the paper is of greater general significance.
3.2. PSIC of high-oder MASs under undirected graphs
Building on the research on the leader-follower PSIC of MASs under directed graphs, we further investigate the case of the leader-follower PSIC of MASs under undirected graphs. The connected undirected graphs will be considered.
Following the variables and vectors defined in the previous section, the virtual control inputs and the control input u
n
are designed as
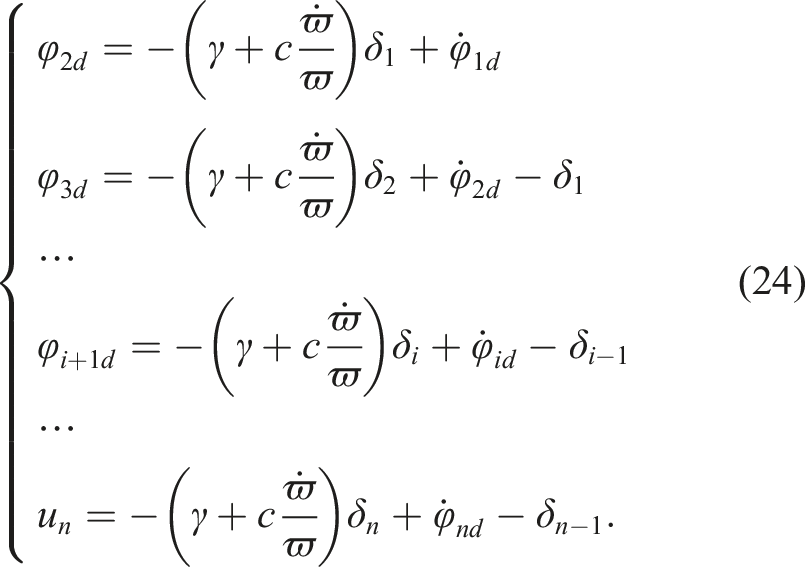
From u
n
in (24), it indicates that the control input for the i-th agent is


Under undirected connected graphs, for the multiple follower systems (2) and the leader system (3), if the control input of the i-th agent is designed as (25), then the prescribed-instant consensus tracking problem of systems (2)-(3) can be achieved.
Define the candidate Lyapunov function as
Its derivative is
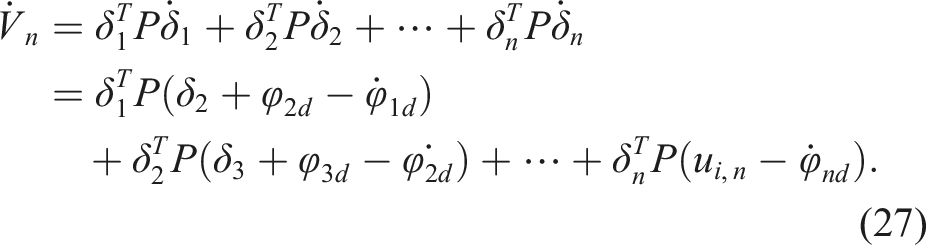
Substituting the respective virtual control input and u
n
into (28), we have
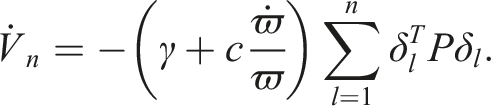
Then, we can obtain the following inequalities

According to Lemma 3, it can be inferred that V
n
will converge to zero at time t
f
. This implies that at the prescribed time instant t
f
, z1 = δ
i
=
Subsequently, for the time interval after t
f
, we can obtain that

Therefore,

Furthermore, V
n
(t) ≡ 0 on [t
f
, ∞), and δ
i
≡
Compared with other control methods, the prescribed-instant consensus control method proposed in this paper neither suffers from the issue that the settling time depends on initial states (as in finite-time consensus control methods) nor the problem that the settling time relies on fixed parameters (as in fixed-time consensus control methods), nor does it have the drawback that the settling time is merely an upper bound (as in prescribed/predefined-time consensus control schemes).
In contrast to Gu et al. (2023) and Kuang et al. (2022), we propose a more generalized time-varying function to solve the prescribed-instant consensus problem of high-order multi-agent systems rather than mandatorily requiring the presence of t − tf in the denominator of ϖ(t).
4. Simulations
Two examples will be contained in this section to illustrate the accuracy of our proposed methods.
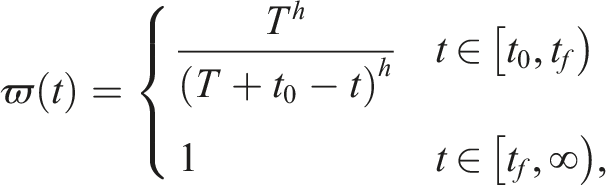
(high-order MASs under directed graphs) Before presenting the simulation details, we first provide the specific expression form of ϖ(t):
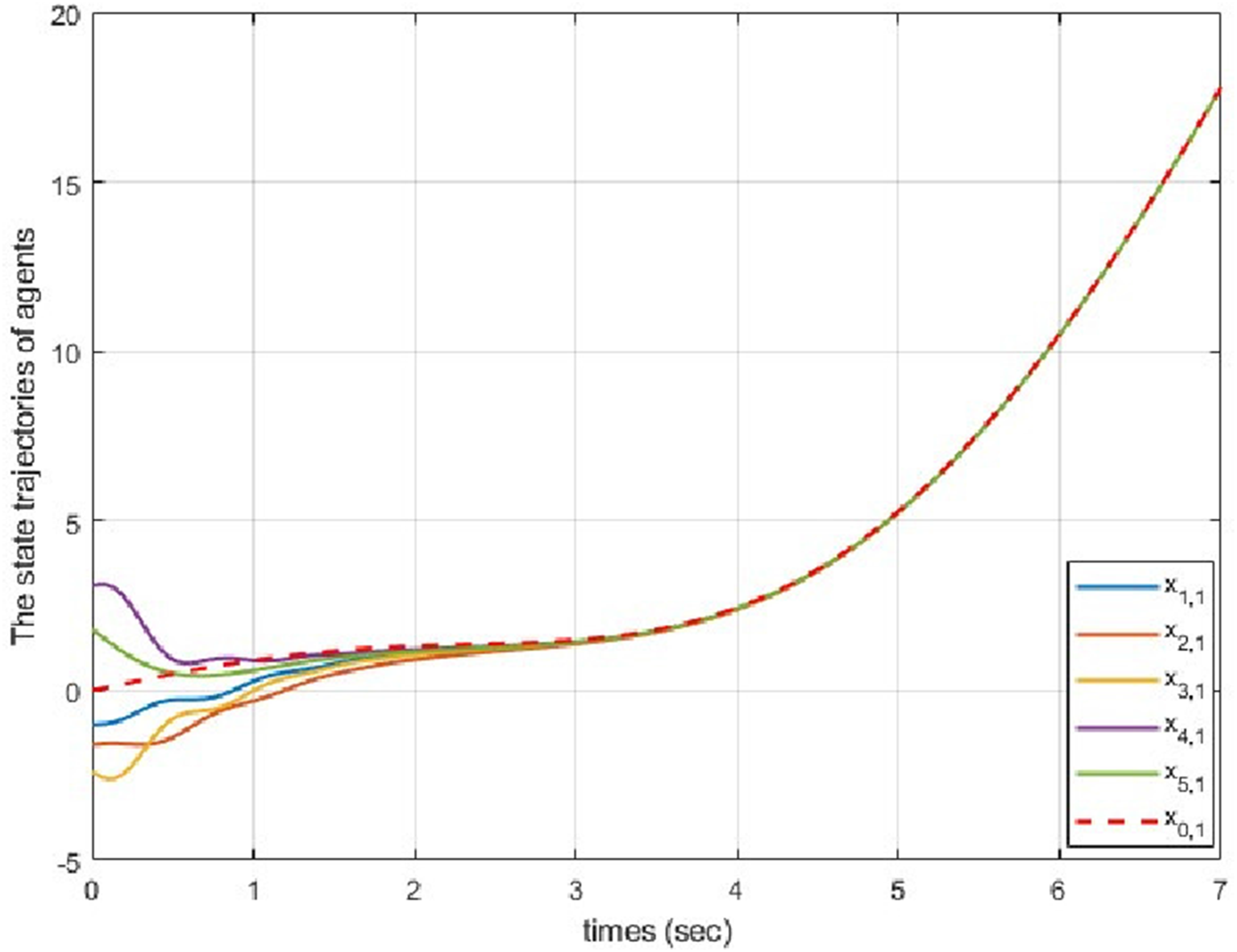
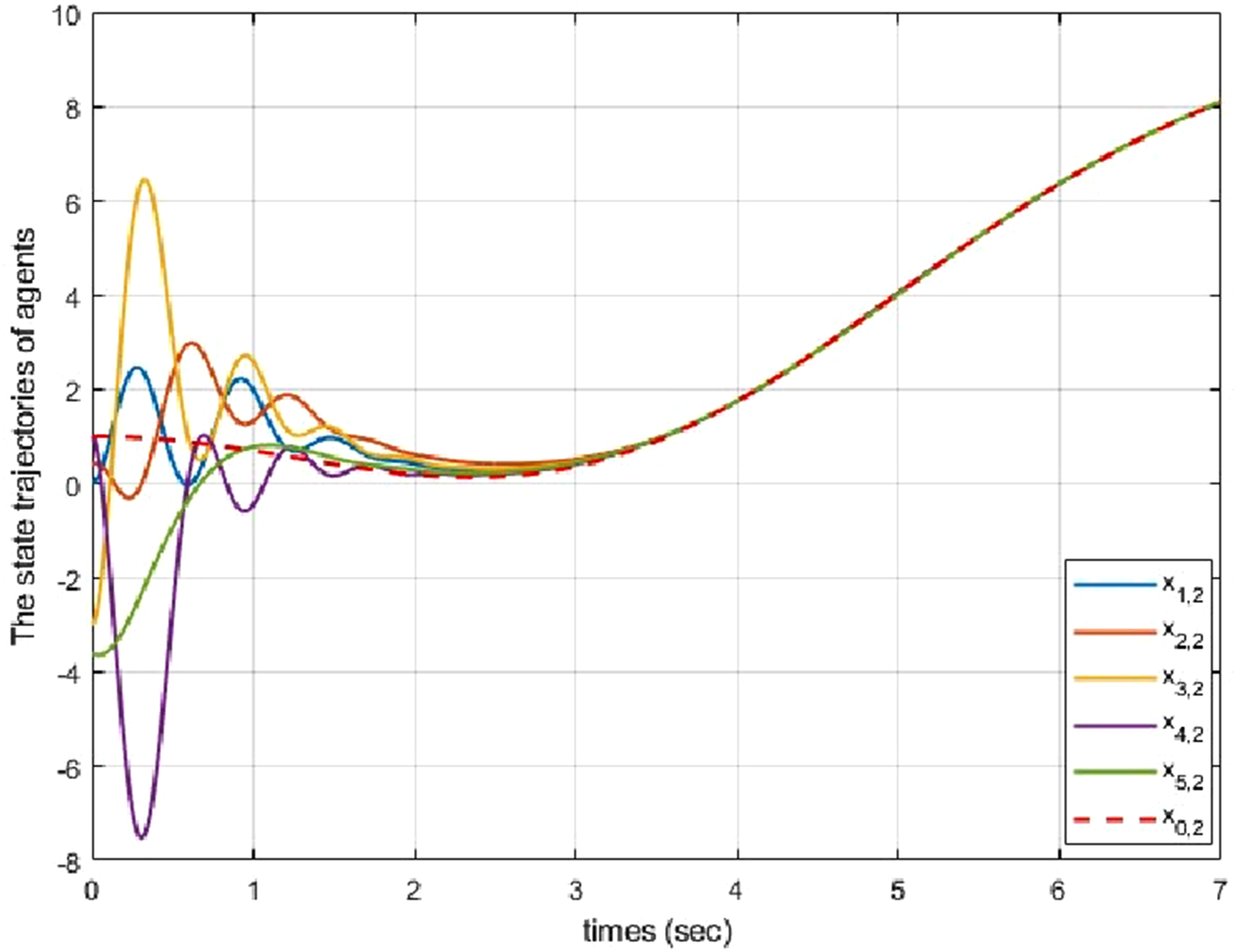
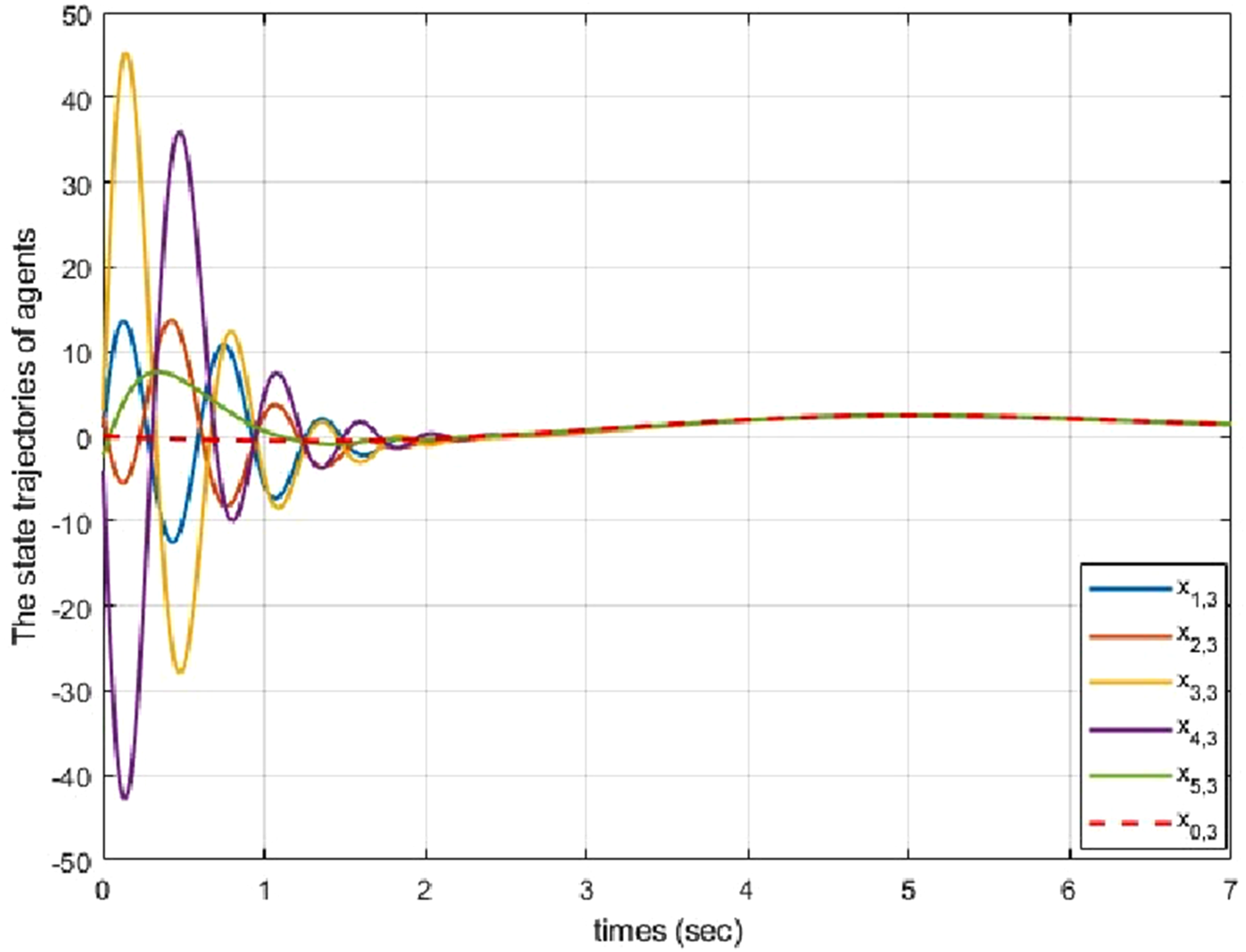
We investigate a multi-agent system that includes a leader and five followers, where each agent is of the third order. The directed graph is shown in Figure 1. The parameters are set as T = 4s, t0 = 0s, t
f
= 4s, h = 1, γ = 1.5, c = 0.5. The initial states of the followers are set to x1 (0) = [−1,0,1]
T
, x2 (0) = [−1.6,0.4,2.5]
T
, x3 (0) = [−2.4,−3,3]
T
, The directed graph of Example 1. The tracking trajectories of the first-order states under directed graph. The tracking trajectories of the second-order states under directed graph. The tracking trajectories of the third-order states under directed graph.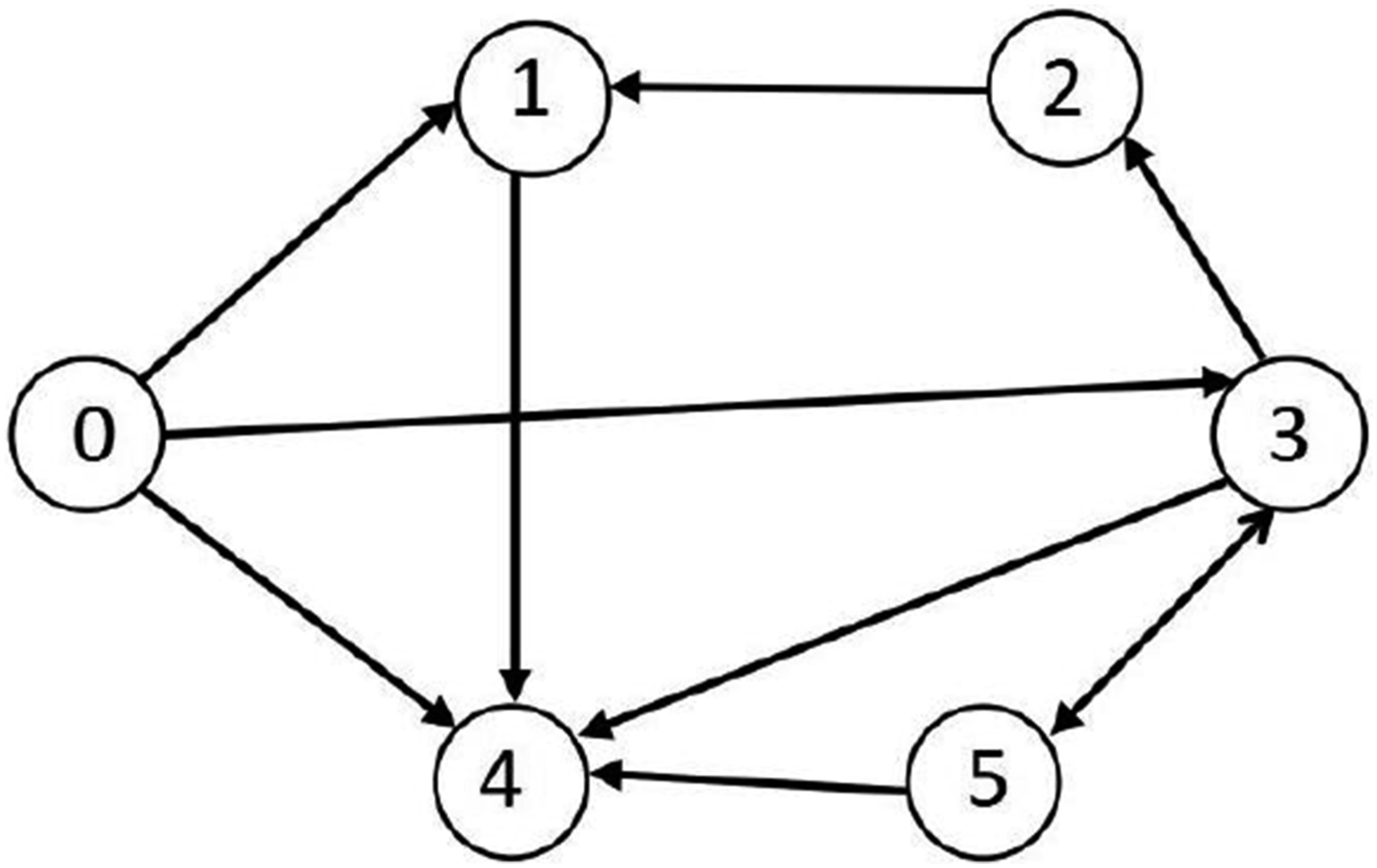
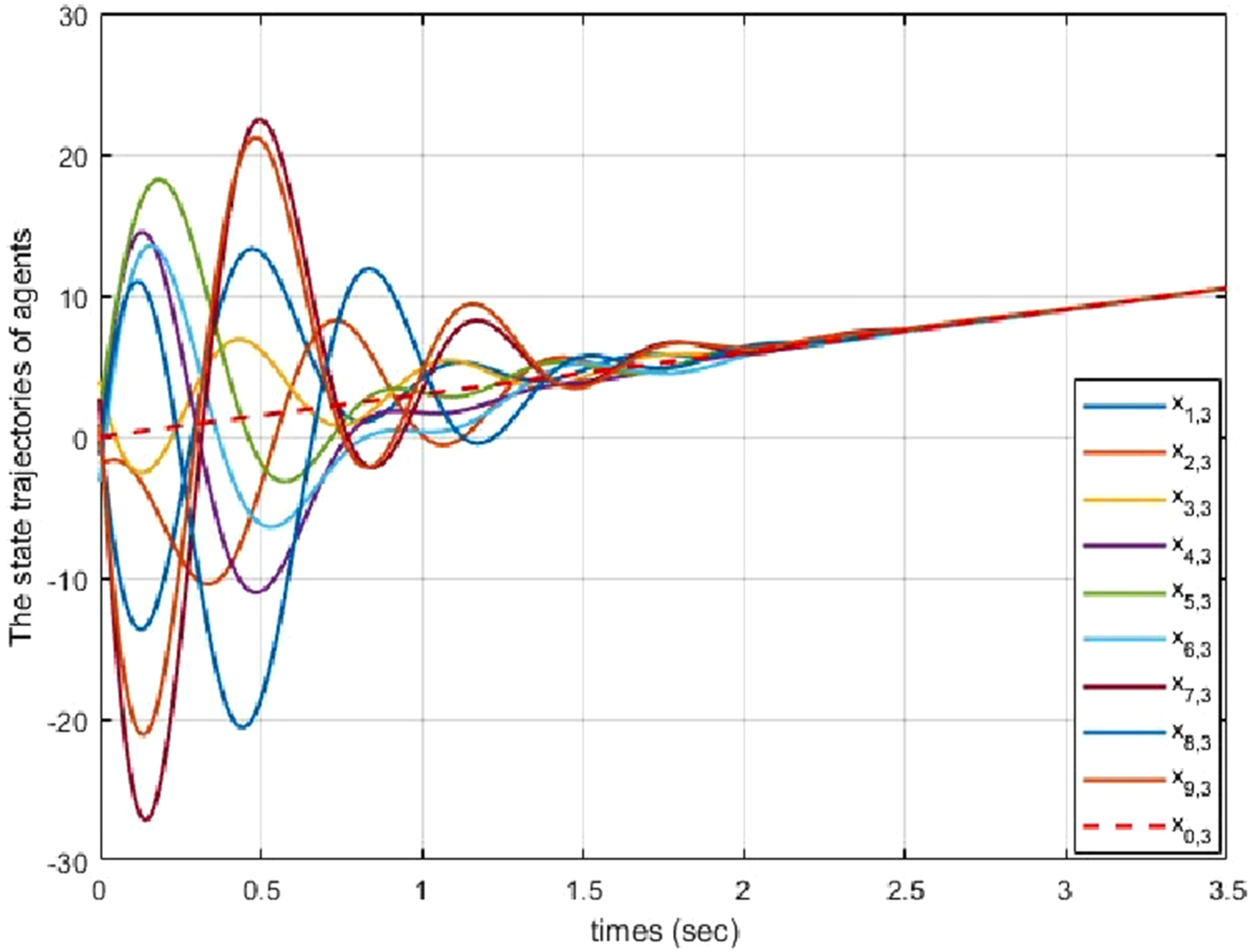
(high-order MASs under undirected graphs) In the simulation of undirected graphs, we choose another form of ϖ(t) as
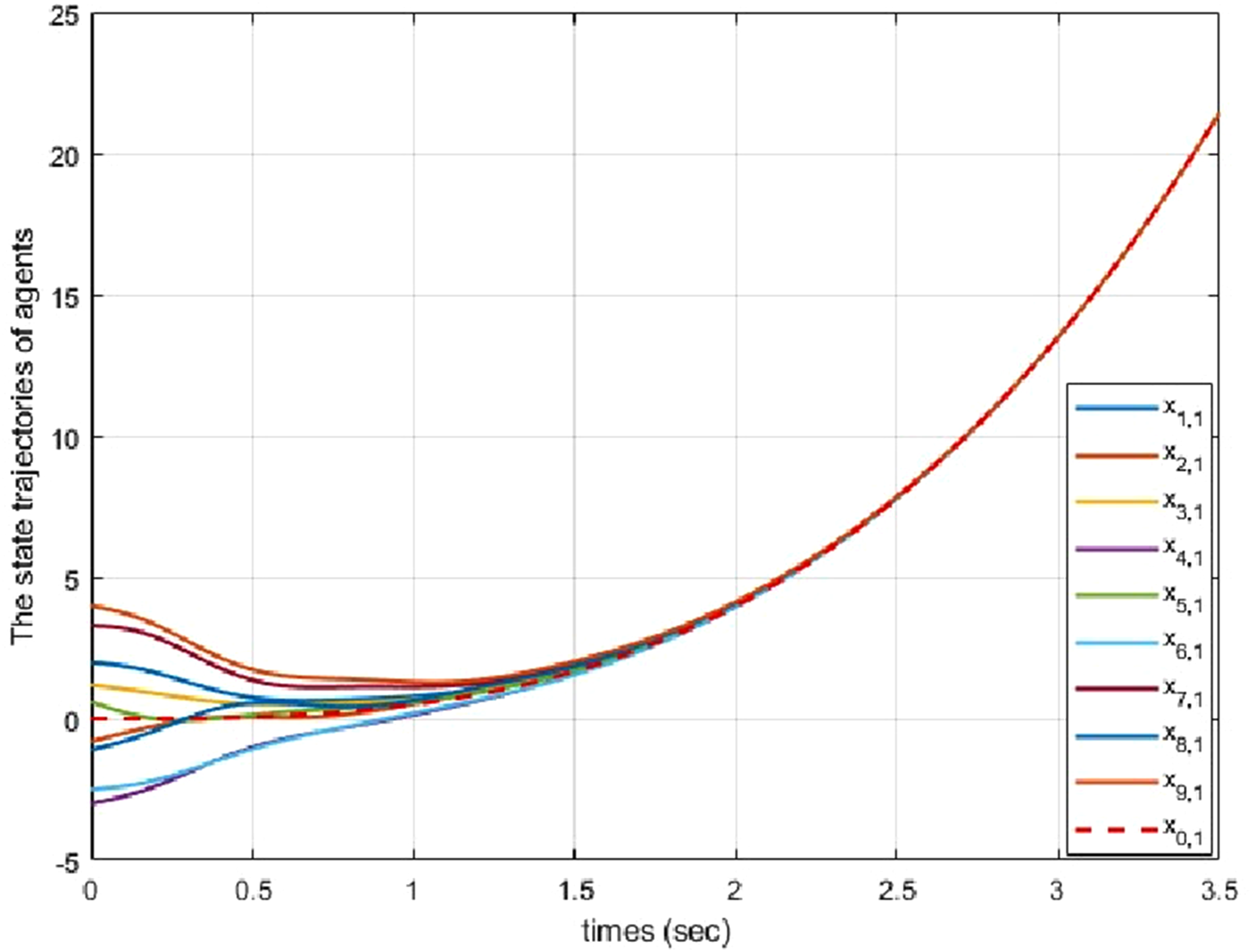
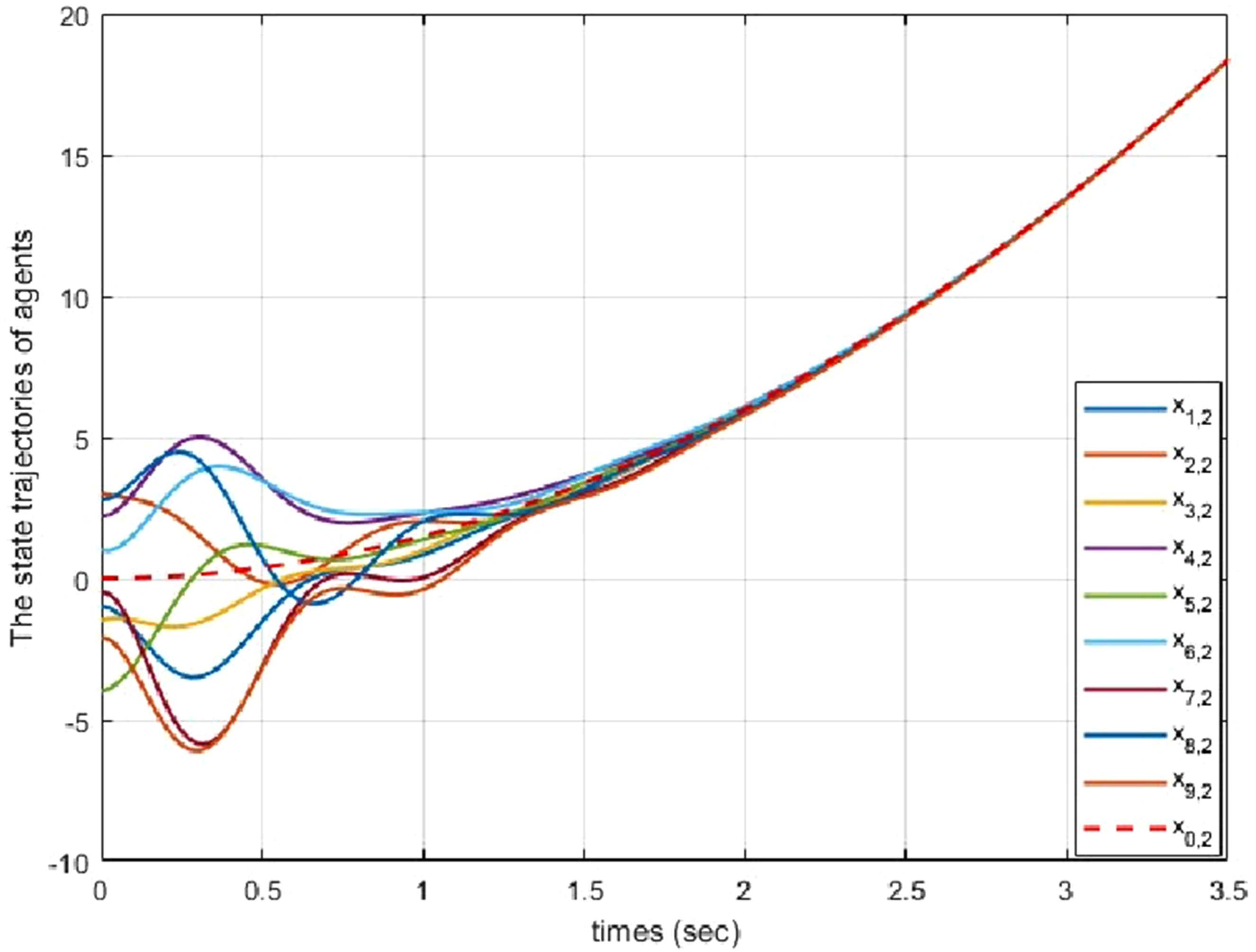
Consider a multi-agent system consisting of one leader and nine followers, where each agent is of the third order, and Figure 5 shows the undirected graph. The parameters are set as T = 2.5s, t0 = 0 s, t
f
= 2.5s, h = 1.5, γ = 1, c = 0.5. The initial states of the followers are set to The undirected graph of Example 2. The tracking trajectories of the first-order states under undirected graph. The tracking trajectories of the second-order states under undirected graph. The tracking trajectories of the third-order states under undirected graph.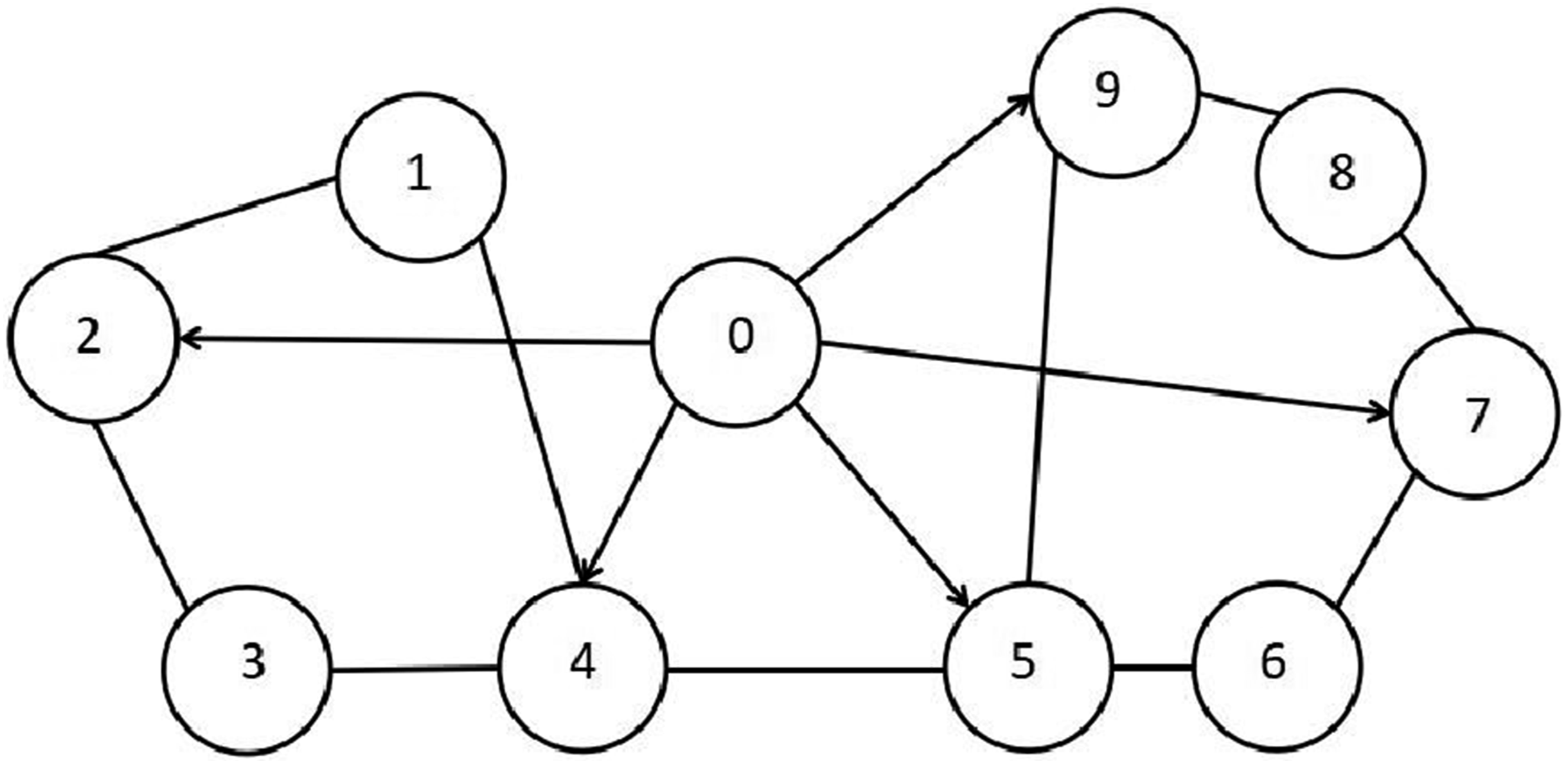
5. Conclusion
The PSIC tracking problem of the leader-follower high-order MASs has been addressed in this paper. With the help of a kind of time-varying functions with specific properties, a sufficient condition for the prescribed-instant stability of general single-loop systems was firstly proposed. After that, relying on the backstepping method, a distributed control input was developed to realize PSIC tracking of MASs under directed graphs that include a directed spanning tree. Consensus analyses were carried out based on the sufficient condition for prescribed-instant stability as well as the algebraic graphs theory. Moreover, the case of undirected connected graphs was taken into account. To verify the proposed methods, numerical examples were shown in the simulation. In future work, we intend to investigate the prescribed-instant consensus tracking problem for multi-agent systems in the presence of nonlinear uncertainties.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant 61703225 and Shandong Provincial Natural Science Foundation under Grant ZR2022MF297.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.