
Abstract
This paper proposes a synergistic control framework combining a novel prescribed-time extended state observer (PTESO) with a chattering-free prescribed-time sliding mode controller (PTSMC) to achieve high-precision trajectory tracking for piezoelectric nanopositioning stages. The proposed PTESO employs a continuous, bounded time-varying function to accurately estimate lumped disturbances within a user-defined time, thereby obviating the need for complex switching mechanisms. A PTSMC method combining precise disturbance estimation and hyperbolic tangent functions is proposed, which significantly suppresses control chattering while ensuring prescribed-time convergence of the tracking error. Experimental validation demonstrates that our approach achieves superior tracking accuracy and faster user-definable convergence while producing a control signal with improved smoothness, offering a significant advantage over existing advanced control strategies.
Keywords
1. Introduction
Piezoelectric nanopositioning stages have been widely applied in high-precision applications, including biological manipulation, atomic force microscopy, and semiconductor manufacturing, owing to their advantages of fast response, high resolution, and immunity to electromagnetic interference (Lyu and Xu, 2022; Wang et al., 2017; Wang and Xu, 2017; Yang et al., 2020). However, the inherent hysteresis nonlinearity of piezoelectric actuators introduces complex, rate-dependent dynamics between the input voltage and the output displacement, which makes system modeling and parameter identification difficult, thus fundamentally restricting the positioning accuracy and overall performance of the positioning stages (Tao et al., 2022).
To mitigate hysteresis effects, the control strategies in the literature are typically divided into two categories: model-based feedforward control and model-free robust control (Clayton et al., 2009). The former relies on constructing an accurate hysteresis model and compensating for its effects via an inverse model, while the latter treats hysteresis and other uncertainties as a lumped disturbance acting on a nominal linear model. The latter approach simplifies controller design while demanding strong robustness to ensure high performance. Furthermore, nanopositioning stages are often subjected to external disturbances during high-speed operation, which further necessitates a robust control framework capable of actively compensating for disturbance.
Sliding mode control (SMC) is a powerful, robust control technique renowned for its invariance to (matched) disturbances and uncertainties (Lv et al., 2021). However, traditional SMC can only guarantee asymptotic convergence, which has driven the development of finite-time control (Zhao et al., 2020). To enhance convergence speed, researchers have proposed continuous terminal third-order SMC (Xu, 2017) and global fast nonsingular terminal SMC (Wang et al., 2023b), to name a few. Polyakov (2012) further advanced fixed-time stability theory by addressing initial condition dependence. Based on this approach, a fixed-time third-order super-twisting-like SMC for piezoelectric platforms is designed, which achieves high-precision tracking and rapid convergence (Wang et al., 2021). However, its convergence time bound still implicitly depends on control gains, limiting the ability to preset the convergence time (Guo et al., 2021).
Prescribed-time control has recently emerged as a compelling solution, allowing the system to converge to the equilibrium within a user-specified time (Song et al., 2019, 2023). This framework has been widely applied in prescribed performance control (Song et al., 2025; Song and Sun, 2022), sliding mode control, backstepping control, and other related methods (Chen et al., 2022; Hua et al., 2022). In the field of sliding mode control, Pal et al. (2020) proposed a terminal sliding mode control method with arbitrarily assigned stabilization time, which achieves system stability within a prescribed-time by switching the sliding surface at a specified stabilization moment. For second-order nonlinear systems with matching disturbances, existing research has proposed a prescribed-time nonsingular terminal sliding mode control method by constructing a linear time-varying sliding surface (Shi et al., 2024). However, the time-varying function used in the above schemes tends to infinity at the stabilization moment, which leads to complex controller design and the high-gain problem. Furthermore, the lemma on prescribed-time stability in Shi et al. (2024) is overly stringent, limiting its applicability to certain practical problems. To overcome this limitation, researchers introduced continuously bounded time-varying functions to establish rigorous sufficient conditions for practical prescribed-time stability, thereby providing a more flexible framework (Zeng et al., 2025a, 2025b). Despite these advancements, such flexible frameworks have not yet been fully exploited in SMC strategies.
To suppress the effects of disturbances and uncertainties on the system, Li et al. (2025) proposes a systematic hierarchical disturbance estimation and suppression framework, which utilizes the extended state observer (ESO) to estimate the total disturbance and implement compensation. To compensate for the lumped disturbances in the piezoelectric nanopositioning stage, including hysteresis nonlinearity and external disturbances, a linear ESO was employed for disturbance estimation and was successfully combined with the sliding mode control method (Wang et al., 2023a). Additionally, the integral ESO further enhances estimation performance for unknown nonlinear characteristics by incorporating an integral term into the traditional linear ESO (Chen et al., 2024). Although the aforementioned ESOs achieve asymptotic and finite-time estimation of disturbances, and fixed-time ESOs address time constraints, they still suffer from drawbacks such as conservative convergence and strong dependence on initial conditions and parameters (Sui et al., 2025). For expanding the application of ESO, prior research has introduced a time-varying scaling function to propose PTESO, which can complete disturbance estimation within a prescribed time while suppressing peak phenomena (Cui and Jin, 2021). However, its rapidly growing function characteristics may trigger system oscillations. Based on this, Li et al. (2023) improved the time-varying function and proposed a novel PTESO, but it still suffers from complex control parameters and the risk of inducing chattering. Due to the high accuracy and time requirements of the piezoelectric nanopositioning systems, the precise estimation of hysteresis nonlinearities and external disturbances at a prescribed time is important, and it is crucial to improve the ESO applicable to nanopositioning systems.
To address the above-mentioned challenges, in this paper, we propose a novel practical prescribed-time SMC (PTSMC) strategy integrated with a PTESO for the piezoelectric nanopositioning stage. The main contributions are summarized as follows. (1) A novel PTESO scheme is presented, which allows flexible specification of state and disturbance estimation times. Compared with the design in Li et al. (2023), the complicated observer switching mechanism is effectively avoided by incorporating continuous time-varying functions. (2) A PTSMC strategy is proposed by replacing the sign function with a continuous function, which improves the trajectory tracking accuracy and ensures that the system state converges within any preset time. The input chattering issue is substantially reduced relative to the design presented in Shi et al. (2024). (3) A synergistic control framework integrating PTESO and PTSMC is developed and applied to the nanopositioning system to effectively suppress the influence of lumped disturbances and achieve high-precision motion tracking. Experimental results are presented to illustrate the efficiency and performance of the proposed approach.
The remainder of this paper is organized as follows. Section 2 introduces the dynamical model and preliminary knowledge of the piezoelectric nanopositioning system. Section 3 presents the main results, which include the prescribed-time extended state observer design and the prescribed-time sliding mode control algorithm, along with stability analysis. Section 4 shows the results of both the simulations and experiments. The conclusion of the paper is presented in Section 5.
2. System model and preliminaries
2.1. System model
The dynamics of the piezoelectric nanopositioning stage, depicted in Figure 1, can be represented by the second-order model, following the approach in Xu (2017), Experimental setup for the piezoelectric nanopositioning stage.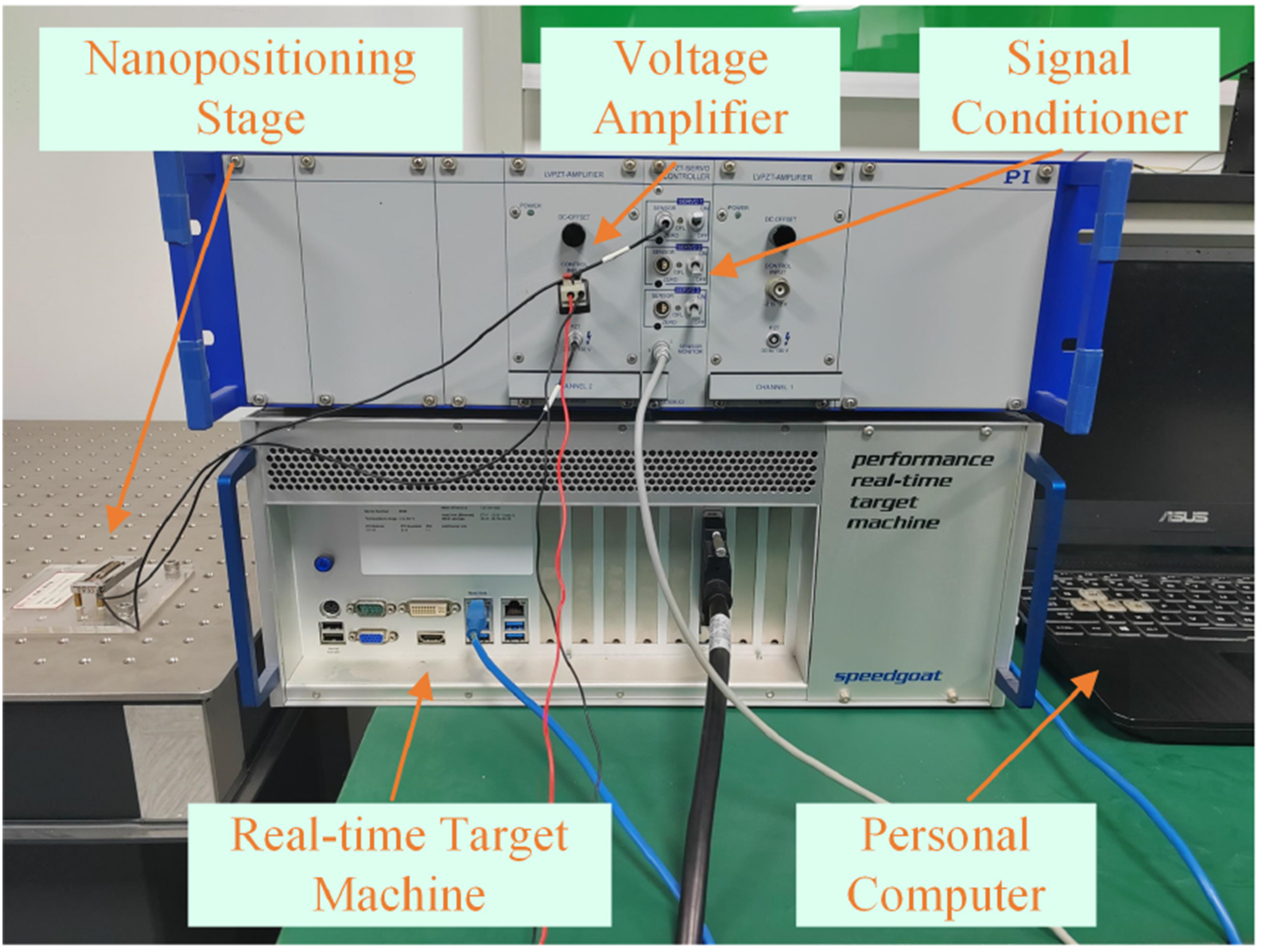

As illustrated by the experimental results in Figure 2, the hysteresis of the piezoelectric nanopositioning stage exhibits pronounced rate-dependent characteristics, which severely degrade tracking performance and necessitate an advanced control strategy for effective compensation. Hysteresis loops of the piezoelectric nanopositioning system.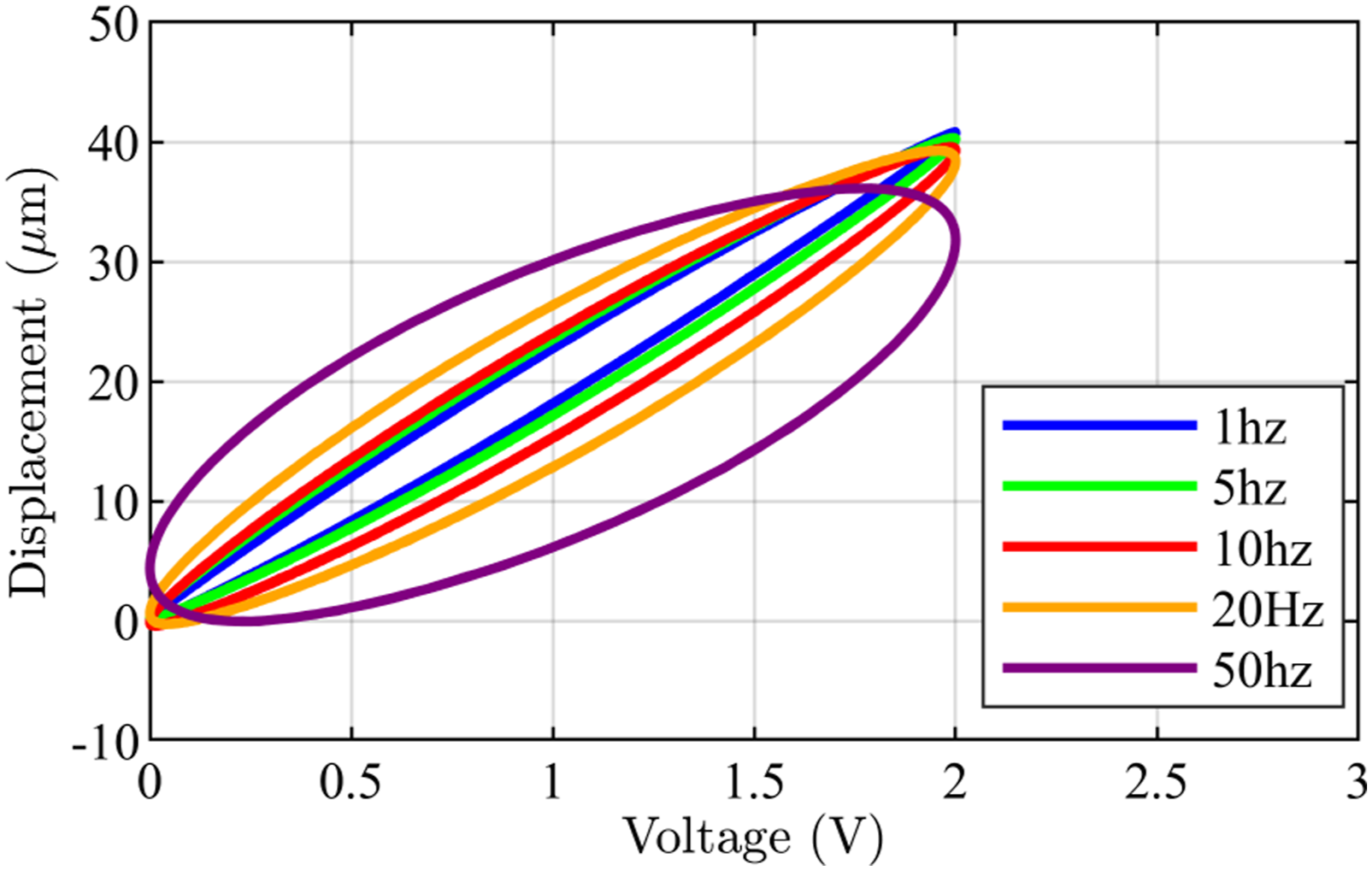
To facilitate the controller and observer design, let us define variables x1: = x,

2.2. Preliminaries on prescribed-time control
Consider the nonlinear system

To achieve practical prescribed-time stability, the following continuously bounded time-varying function and its l-th order time derivative Γ(l) are defined.
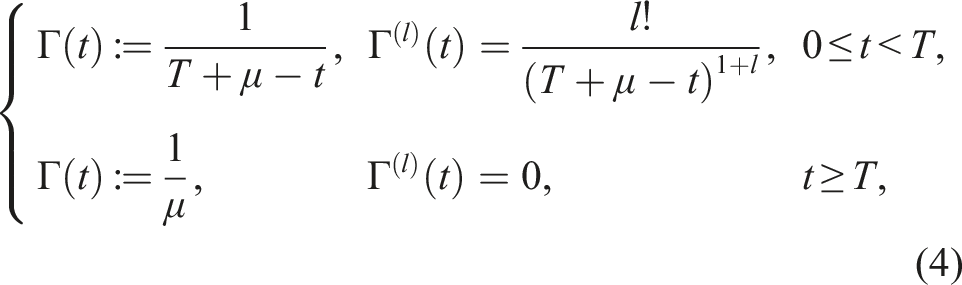
It is noted that the function Γ satisfies The plot of the time-varying function Γ with different parameters.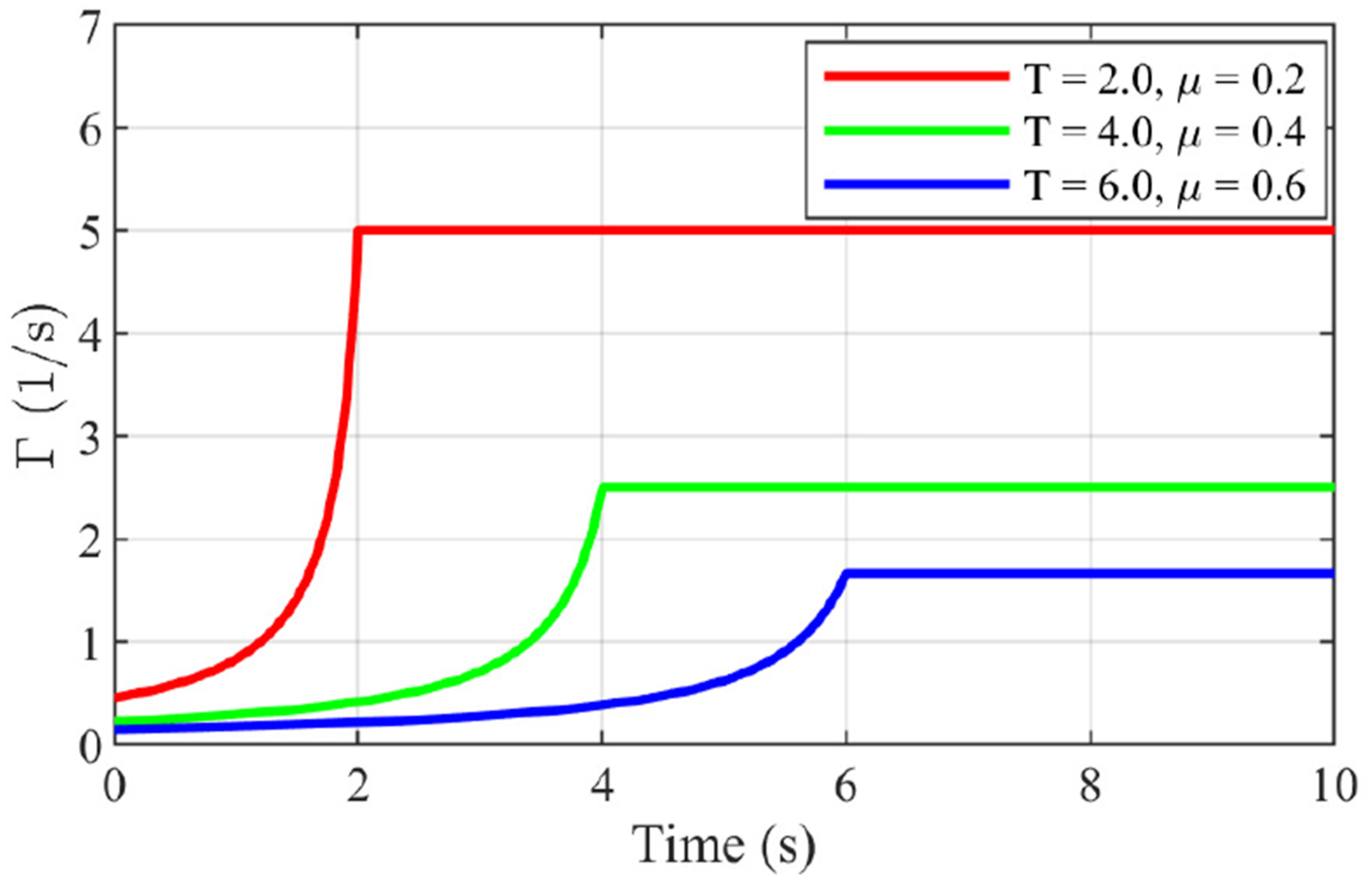

Proof. For t ∈ [0, T), the following is derived from (5). (1) If η = 1, integrating (5) we obtain
Then, it follows that (2) If η ≠ 1, we have that

Hence, one gets
For t ∈ [T, + ∞), it follows from (4) and (5) that


We make the following assumption.
Note that, within the input-output modeling framework and operating regime considered in this work, hysteresis and unmodeled flexible dynamics are reasonably lumped as matched additive disturbances acting on the actuator side, while the input gain is treated as a constant for control analysis and synthesis.
3. Main results
The overall prescribed-time control approach proposed in this work is shown in Figure 4, which combines the sliding mode control technique, the extended state observer approach, and the practical prescribed-time theory, aiming at realizing the precise control of the piezoelectric nanopositioning stage. Block diagram of the proposed control framework.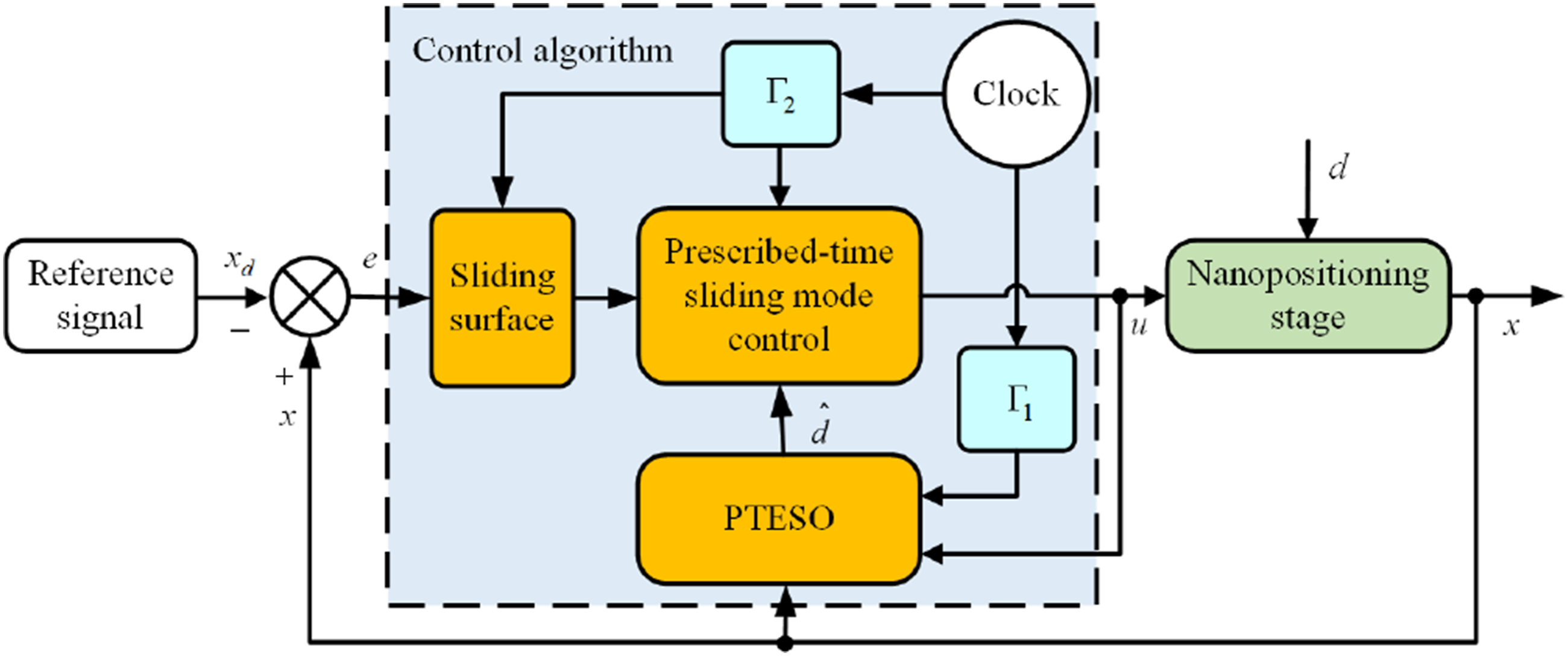
3.1. Prescribed-time extended state observer
Let us use
Subtracting (12) from (2), the estimation error dynamics are given by
In matrix form, (13) can be expressed as

Considering the Lyapunov candidate


Taking time derivative of


According to Lemma 1, for all t ≥ T1,

Hence,

Then
Therefore,

Since Γ1(t) = 1/μ1 for t ≥ T1,

3.2. PTSMC design based on PTESO
In this section, a composite control strategy incorporating PTESO and PTSMC is proposed. The PTESO provides real-time disturbance compensation, while the PTSMC guarantees prescribed-time convergence of the tracking error and robustness against residual estimation errors.
First, the displacement and velocity tracking errors are denoted by


The prescribed-time control law is designed as
Substituting the control law (26) into (27) results in the closed-loop sliding mode dynamics:

Consider the Lyapunov function candidate V
s
= 1/2s2. Taking time derivative of V
s
and according to Lemma 2 yields
Based on Lemma 1, for t ≥ T2 we have

Hence, V
s
(t) ≤ Vs, max for all t ≥ T2, where

Therefore, there exists a constant S >0 such that

Then, we have

Choosing the Lyapunov function candidate


Then, from z1 = Γ2e1 and the fact that Γ2(t) =

That is, e1 enters the residual set {‖e1‖ ≤ EI} at t = T2 and remains bounded thereafter.
Next, from

Moreover, z2 = s − c1z1 − c2Γ2z1. Therefore,

Noting that

Finally, ‖e1(t)‖ ≤ EI and ‖e2(t)‖ ≤ EII for all t ≥ T2, indicating that the tracking error system is practically prescribed-time stable.
4. Simulation and experimental results
In this section, the performance of the proposed PTESO-based PTSMC strategy is shown through both simulations and experiments on the piezoelectric nanopositioning stage.
4.1. Simulation results
The simulations were conducted using the identified model parameters of the nanopositioning stage from Wang et al. (2023a). That is, a0 = 3.2066 × 106, a1 = 2372, b0 = 5.255 × 107. All parameters are in SI units. To emulate the complex and time-varying nature of hysteresis and external disturbances, a lumped disturbance was introduced, defined as d(t): = 5 × 105 sin (20π(t + 2)). The desired trajectory was set to a sinusoidal signal, that is, x
d
(t): = 10 sin (20πt − π/2) + 10. To evaluate the independence from initial conditions, simulations were initiated from two distinct states: x (0) = [5,0]
⊤
and x (0) = [20,0]
⊤
. In addition, to illustrate the convergence effect of the observers, the initial disturbance estimate is defined as
To validate the superiority of the proposed method, the proposed PTESO-based PTSMC is compared with the prescribed-time nonsingular sliding mode control (PTNSMC) (Shi et al., 2024) based on switching PTESO (Li et al., 2023) (SPTESO-based PTNSMC). The governing equations for the SPTESO are given by
The controller convergence time is T2 = 0.1.
For a fair comparison, the parameters for the PTSMC are set to c1 = 10, c2 = 10, k0 = 3 × 103, k1 = 20, k2 = 1 × 106, and μ2 = 0.01. The parameters of the proposed PTESO are l1 = 10, l2 = 40, l3 = 30, ρ0 = 55 and μ1 = 0.02. Moreover, two different sets of convergence times are chosen: [T1, T2] = [0.01, 0.1] and [T1, T2] = [0.03, 0.05].
The simulation results of trajectory tracking and error estimation are shown in Figure 5, demonstrating that the proposed controller successfully forces the tracking error to converge within the prescribed times of 0.05 and 0.1, respectively, regardless of the initial conditions. This validates the prescribed-time convergence capability of the proposed PTSMC. Furthermore, error comparison demonstrates that the proposed control strategy exhibits higher tracking accuracy compared to the SPTESO-based PTNSMC. The control input (Voltage) profiles show that the proposed method effectively avoids chattering in the control input by employing the hyperbolic tangent function. The lumped disturbance and estimation error profiles demonstrate the superiority of the proposed PTESO, which achieves disturbance observation within the preset time while avoiding the chattering caused by SPTESO. The maximum disturbance estimation errors for the two methods are 1.62 × 104 and 1.33 × 104, respectively, with PTESO achieving 17.9% higher accuracy than SPTESO. This improvement enhances the precision of disturbance compensation, thereby improving the system tracking performance. Comparison of simulation results for sinusoidal trajectory tracking.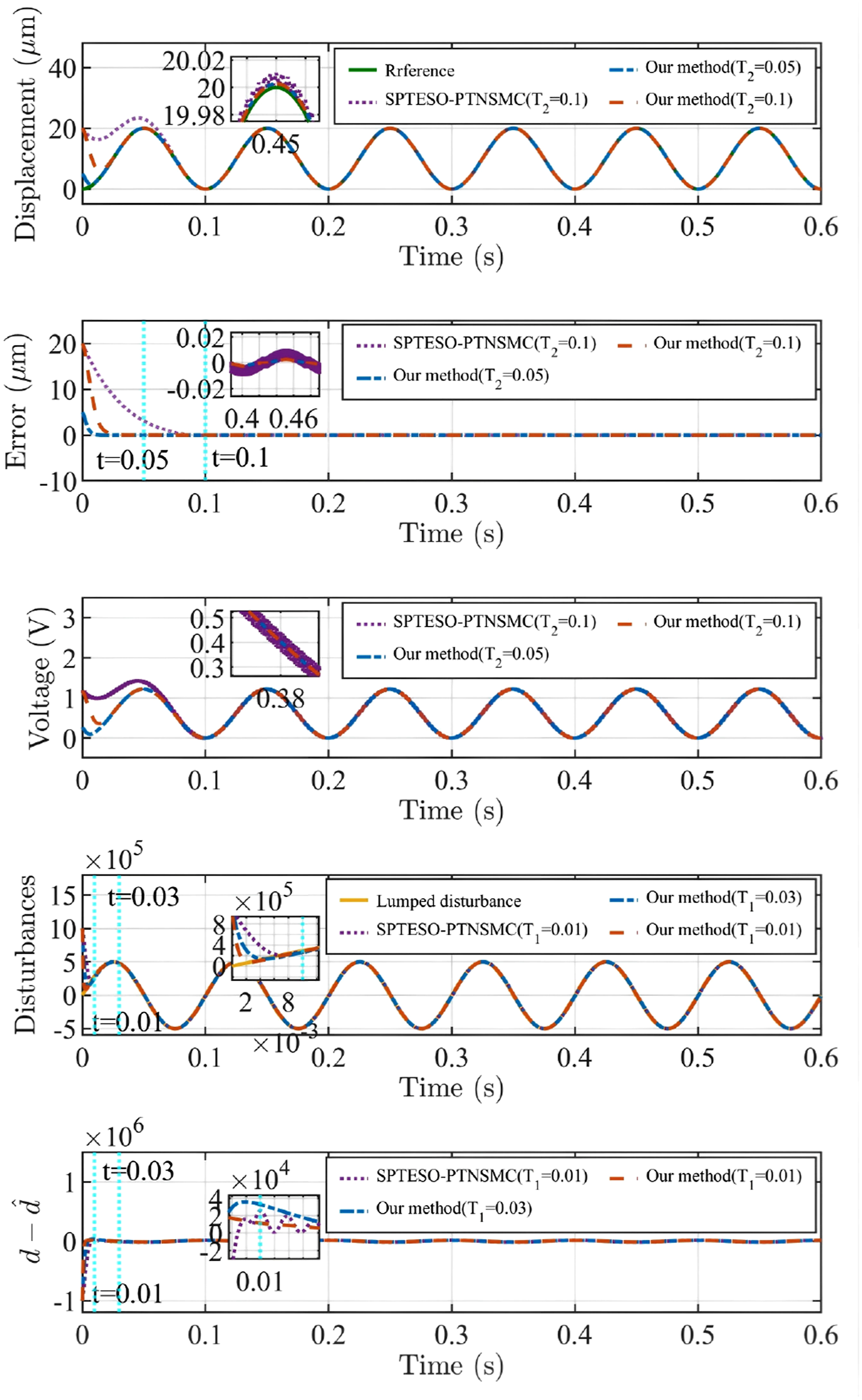
4.2. Experimental results
The experimental validation was performed on the piezoelectric nanopositioning platform shown in Figure 1. The setup consists of a flexible-hinge stage (Model: PI P-603.3S2), which features an integrated piezoelectric actuator and a strain gauge sensor. The stage has a maximum travel range of 380 μm and operates with excitation voltages from −20 V to +120 V. The Speedgoat real-time target machine serves as the control core, executing the control algorithm online. Real-time commands are sent from a host computer to the target machine, which interfaces with the platform via a Speedgoat IO133 data acquisition board. The control voltage computed by the algorithm was amplified tenfold by a voltage amplifier (PI E-505.00S) before being applied to the piezoelectric actuator. The sampling frequency was set to 10 kHz.
To comprehensively evaluate the performance of the proposed control strategy, the proposed method is compared with the conventional sliding mode control based on the finite-time extended state observer (Sun et al., 2015) (FTESO-based CSMC) and SPTESO-based PTNSMC.
The finite-time extended state observer (Sun et al., 2015) is given by

Parameters of the controllers.
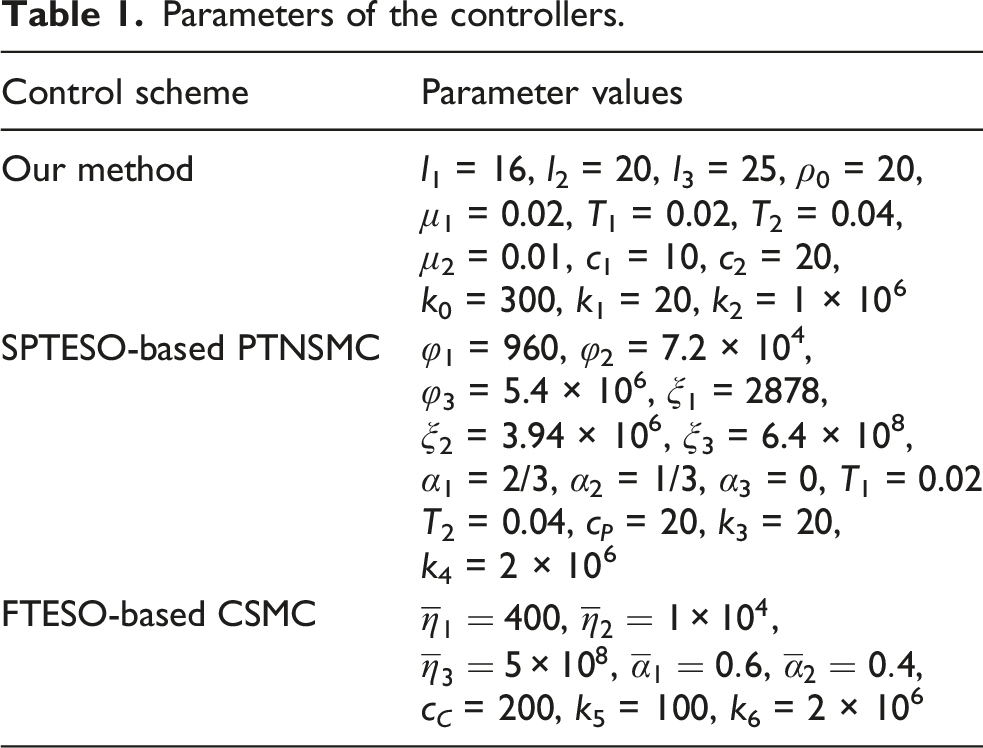
Figure 6 presents the comparative experimental results of control performance for a 5 Hz sine trajectory. From the displacement trajectories and the corresponding tracking error profiles, it is observed that although the convergence time of the FTESO-based CSMC method attempts to approach the prescribed termination instant, it still exhibits significant chattering phenomena during the steady-state phase. In contrast, the proposed method achieves a smoother transient response without noticeable overshoot while realizing prescribed-time convergence. Combined with the quantitative data in Table 2, the proposed method significantly reduces the maximum position tracking error (MPTE) by 54.1% and 70.3% compared to the FTESO-based CSMC and SPTESO-based PTNSMC, respectively. Furthermore, the state estimation error profiles Comparative analysis of experimental results for 5-Hz sine wave trajectory tracking. Performance indicators of different control schemes.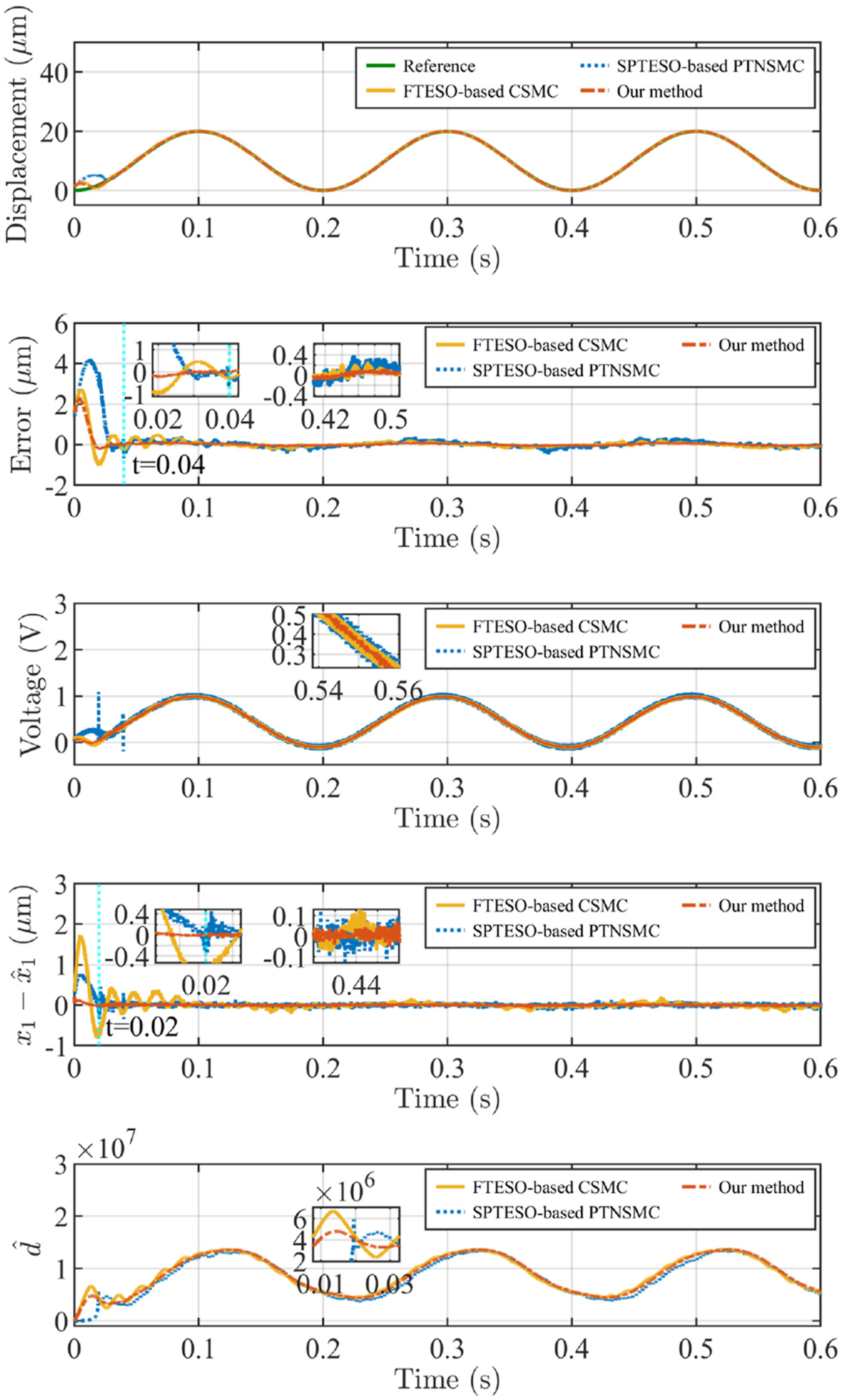
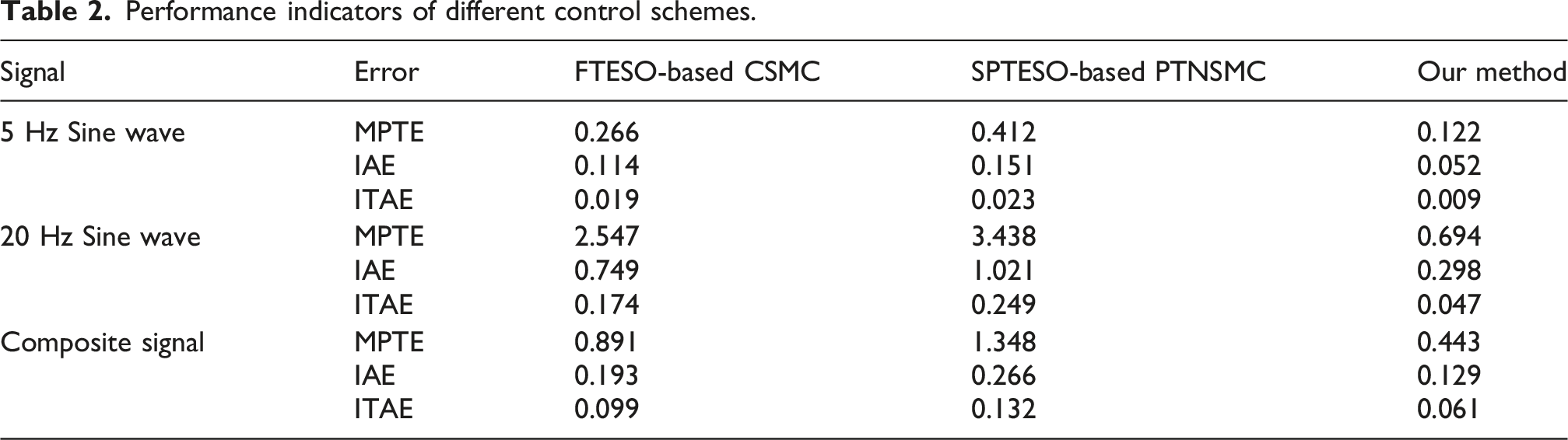
Figure 7 further illustrates the experimental results for high-frequency (20 Hz) sine trajectory tracking. A comprehensive analysis of Figure 7 and Table 2 reveals that the maximum tracking errors for the three methods are: 2.547 for FTESO-based CSMC, 3.438 for SPTESO-based PTNSMC, and only 0.694 for the proposed method. This data indicates that even under high-frequency operating conditions, the proposed method maintains the user-defined prescribed-time stability, and its MPTE is reduced by 72.8% and 79.8% compared to the FTESO-based CSMC and SPTESO-based PTNSMC, respectively. Moreover, as observed from the estimation error profiles, the maximum estimation errors of the FTESO and SPTESO reach as high as 0.49 and 0.78, respectively, which are significantly higher than the 0.15 achieved by the proposed PTESO. It can be inferred that the proposed method exhibits optimal tracking robustness and estimation performance across sine reference signals of varying frequencies. Comparative analysis of experimental results for 20-Hz sine wave trajectory tracking.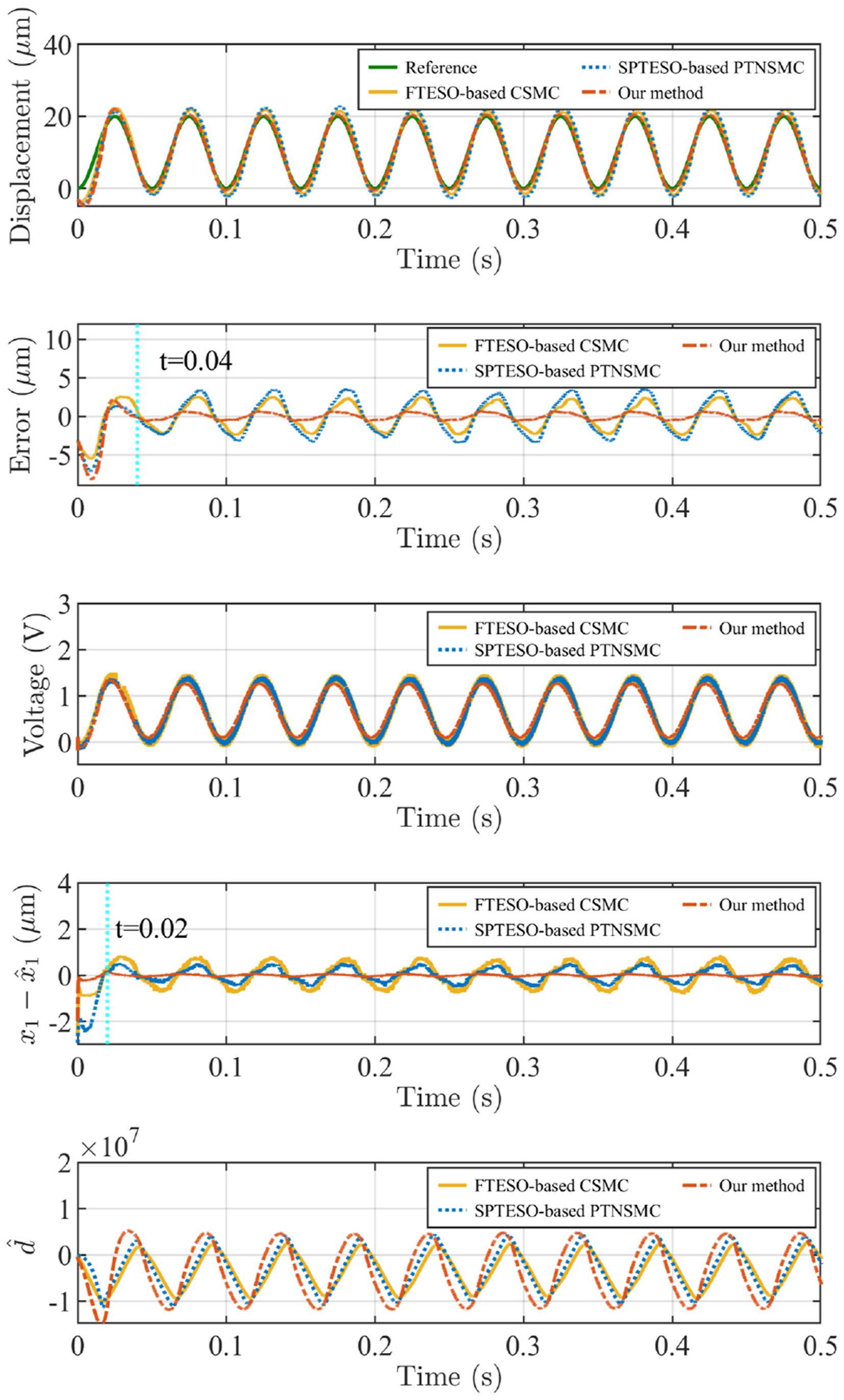
Additionally, to verify the algorithm’s capability to handle complex operating conditions, Figure 8 presents a comparison of the tracking performance of the three controllers for a composite signal. According to the statistical data in Figure 8 and Table 2, the maximum tracking errors of the nanopositioning stage under the three control schemes are 0.891 (FTESO-based CSMC), 1.348 (SPTESO-based PTNSMC), and only 0.443 (proposed PTESO-based PTSMC). Meanwhile, Figure 8 shows that the position estimation error achieved by the proposed observer is as low as 0.083, representing an improvement in observation precision of 79.5% and 59.1% compared to FTESO and SPTESO, respectively. Moreover, the proposed observer is free from the sign function, which eliminates high-frequency switching and results in smoother state estimation. Consequently, it is evident that the proposed control strategy maintains superior dynamic performance even when dealing with complex reference trajectories. Comparative analysis of experimental results for composite signal trajectory tracking.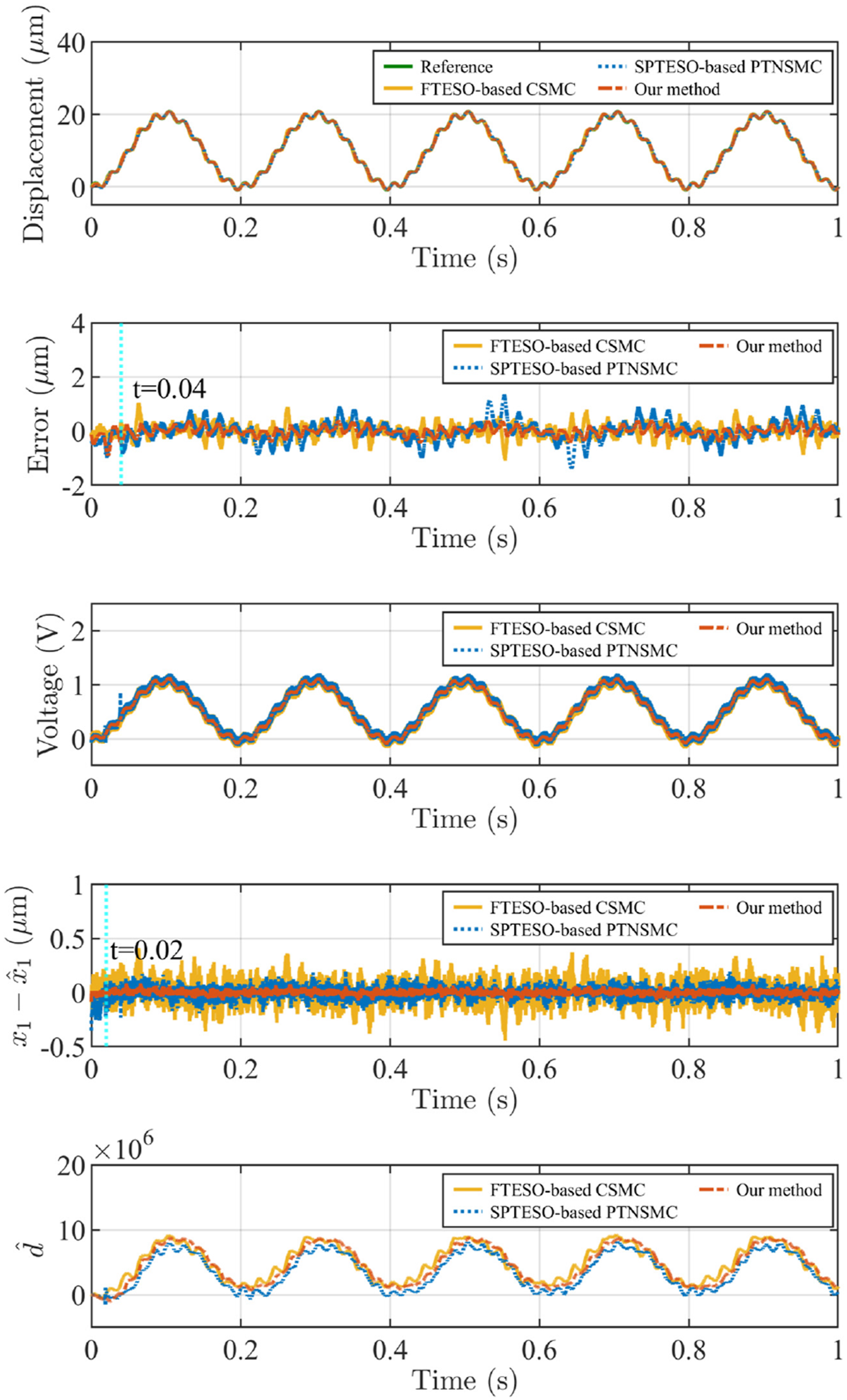
Furthermore, Table 2 also presents the integral absolute error (IAE) and integral time absolute error (ITAE) for the three control methods to evaluate the cumulative tracking performance. It is observed that the proposed control scheme consistently achieves the minimum IAE and ITAE values across all test scenarios. This further corroborates its significant advantages in terms of high precision, minimal error accumulation, and rapid convergence, particularly in the presence of inherent hysteresis nonlinearities and external disturbances.
The control input (Voltage) profiles presented in Figures 6–8 depict the performance of the proposed control scheme. Due to the use of a discontinuous time-varying function in the SPTESO-based PTNSMC method, its control input exhibits pronounced fluctuations at the observer estimation time of 0.02 and the sliding mode stabilization time of 0.04. In contrast, the proposed approach effectively suppresses control input chattering by incorporating a continuous time-varying function and a hyperbolic tangent function, thereby enhancing control smoothness compared to the other two methods. Furthermore, Figure 9 illustrates the peak and root mean square (RMS) values of the control input. It is evident from the figure that our method yields the lowest peak and RMS values. This indicates that the proposed control method significantly reduces control energy consumption and the risk of actuator saturation while achieving superior tracking performance, thereby demonstrating higher engineering practicality. The peak and RMS values of the control input.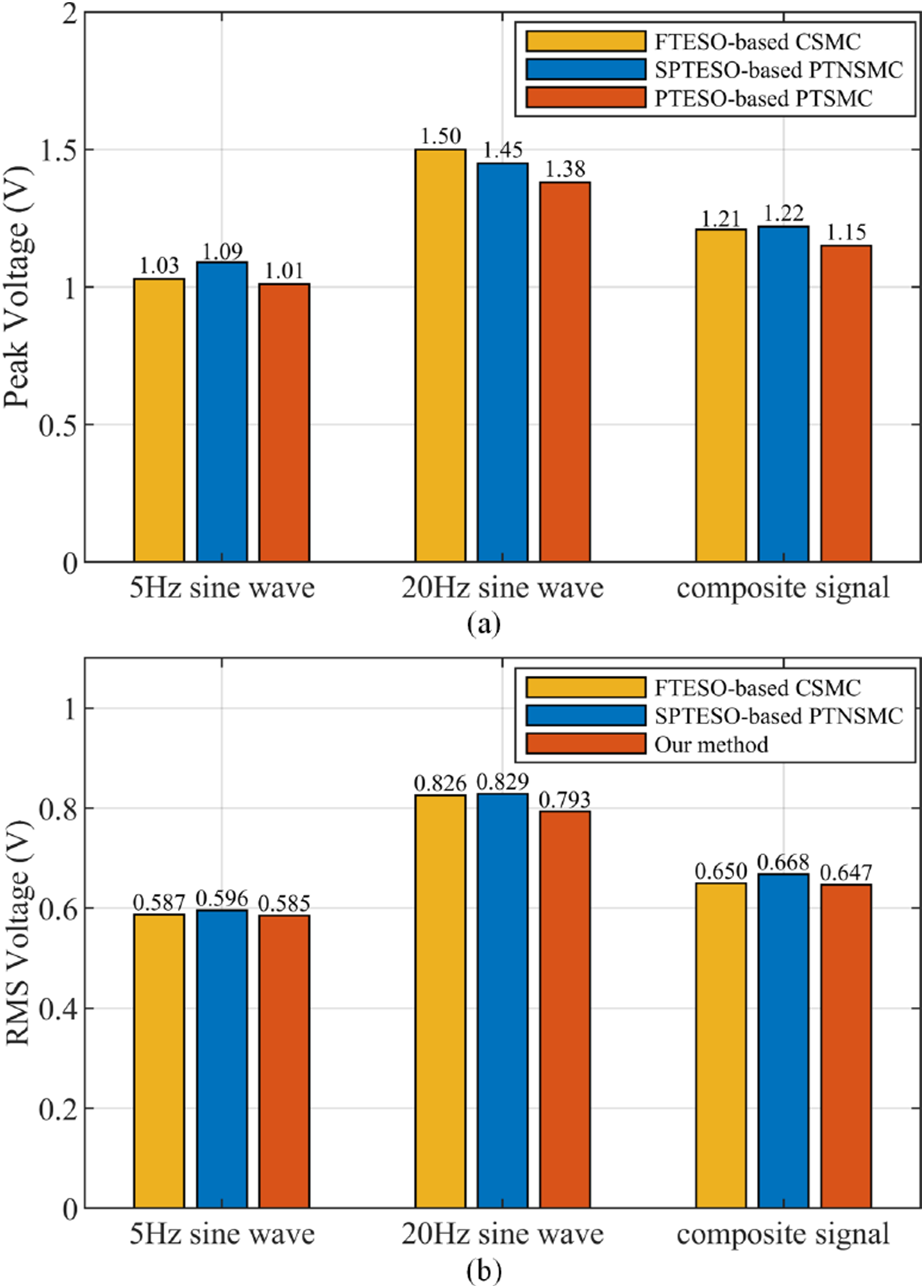
5. Conclusion
In this paper, we present a prescribed-time sliding mode control (PTSMC) method that integrates a novel prescribed-time extended state observer (PTESO) to solve the high-precision trajectory tracking problem for piezoelectric nanopositioning stages. The PTESO, based on a continuous and bounded time-varying scaling function, is proposed to achieve accurate estimation of the lumped disturbance within a user-defined time to obviate the switching mechanisms that often introduce complexity and instability. Based on robust estimation, we developed a chattering-free PTSMC by replacing the sign function with a hyperbolic tangent function. The resulting integrated controller guarantees system state convergence within a pre-assigned time while maintaining a smooth control signal, which is critical for the longevity and performance of piezoelectric actuators. Comprehensive simulation and experimental results demonstrated that the proposed method outperforms existing finite-time and prescribed-time controllers in both convergence speed and tracking accuracy, while effectively eliminating the control chattering phenomenon. Thus, this work offers a robust and practical solution for high-performance nanopositioning applications. Future work will explore multi-input multi-output nanopositioning systems and investigate adaptive parameter tuning and input saturations.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China under Grant 52265070 and Zhuhai Industry-Academia Cooperation R&D Project under Grant 2320004002732.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.