
Abstract
This study introduces the multiplication free semi-discretization method (MFSD), a novel approach for the efficient stability and fixed-point analysis of time-periodic delayed differential equations (DDEs). Efficient stability prediction is critical for mitigating instabilities in mechanical systems, such as machine tool chatter in milling and vibration in delayed control systems, where high-accuracy modelling often leads to prohibitive computational costs. Unlike traditional semi-discretization methods that are burdened by high computational demands due to repeated matrix multiplication, the MFSD method leverages a composite mapping structure inspired by collocation techniques to achieve linear time complexity
1. Introduction
Delayed differential equations (DDEs) play a pivotal role in modelling dynamics where time delays are intrinsic, such as in control systems (Åström and Murray, 2021; Habib et al., 2016; Bartfai and Dombovari, 2022), biological processes (Stepan, 2009; Insperger et al., 2022; Kovacs and Insperger, 2018), vehicle dynamics (Li et al., 2024; Mi et al., 2024) and mechanical vibrations (Bartfai et al., 2024; Horvath and Takacs, 2023; Sanz-Calle et al., 2024; Zhang and Xi, 2022). The stability analysis of DDEs is crucial for predicting system behaviour and ensuring reliability (Ali et al., 1998; Kiss et al., 2022; Borgioli et al., 2020). However, calculating the stability of DDEs poses significant computational challenges, especially when it is critical to capture the system’s dynamics accurately (Zatarain and Dombovari, 2014; Toth et al., 2017; Lehotzky et al., 2016; Lichtner et al., 2011; Itovich et al., 2024).
There are several available methods, most of them in frequency- and time domains. In the frequency domain, conventional approaches, such as calculating stability boundaries, involve the critical frequency as an additional parameter (Stepan, 2009; Ozturk and Budak, 2008; Bachrathy and Stepan, 2013). These methods often require complex integration along the frequency parameter, limiting their practicality. Alternatively, time-domain methods, including collocation-based and integration-based strategies, offer solutions but with their own sets of challenges. Collocation methods and time-finite element methods (Butcher and Bobrenkov, 2011; Lehotzky and Insperger, 2016; Lehotzky et al., 2018; Vyasarayani et al., 2014; Breda et al., 2005; Bayly et al., 2003), known for their excellent convergence properties, face difficulties with discontinuities, making them less robust and more complex to implement for general cases.
Despite these limitations, collocation-based approaches continue to be applied successfully in structural dynamics problems involving delay, particularly when combined with finite element discretization in space. For example, recent studies have applied Chebyshev-based discretization to analyse the delayed stability of delaminated composite beams subjected to follower forces (Szekrényes, 2023, 2025), demonstrating the practical relevance of such methods in vibration problems with distributed parameters and time-delay feedback.
Our focus is on an integration-based strategy, specifically the semi-discretization method (Insperger and Stépán, 2002; Insperger and Stepan, 2004; Insperger and Stépán, 2011; Sykora and Bachrathy, 2020) and its alternatives (Ozoegwu, 2018; Insperger, 2010; Liu et al., 2024; Yang et al., 2023), such as full-discretisations. Despite their limited convergence, these methods are favoured for their ease of implementation. The trade-off between convergence limitations and implementation ease is often acceptable, especially when handling systems with non-smooth behaviour.
Traditionally, these methods involve repeated matrix multiplication, significantly increasing CPU time demands. In Henninger and Eberhard (2008), the method has been optimised based on the special matrix structure leading to quadratic time complexity. Current literature primarily concentrates on improving the eigenvalue convergence rate rather than computational efficiency, attempting to achieve more accurate eigenvalues at lower resolution (Ozoegwu, 2018).
However, it’s crucial to note the trend in newer techniques that promise better time complexity of the eigenvalues of the mapping with fewer resolution steps. Often, these methods are demonstrated with a very limited resolution range (<100) (Ozoegwu, 2018; Liu et al., 2024; Yang et al., 2023), and usually not in a log–log scale, making it challenging to discern true convergence rates and the time complexity. At lower resolution levels, the nuances in implementation can significantly influence outcomes, potentially resulting in inaccurate conclusions. Furthermore, these higher-order methods have similar difficulties with discontinuities as the collocation methods.
We have to note that there is a new class of time-domain methods, which are based on direct simulation of the investigated DDE (Zatarain and Dombovari, 2014; Zatarain et al., 2015; Toth et al., 2017). These methods iteratively extract the eigenvalue/eigenvectors of the underlying mappings from the simulated timeseries and promise excellent work-precision diagrams. Unfortunately, their iterative nature makes it hard to compare them based on time complexity to the above-mentioned time domain methods where exact resolution-CPU time can be determined.
This study extends the integration-based time-domain methods by introducing a novel approach inspired by collocation techniques, enabling a linear time complexity implementation. The main aim is to overcome the computational limitations of traditional semi-discretization methods by eliminating the need for repeated matrix multiplications. The development is specifically presented for the semi-discretization method but is applicable to any approach that involves step-wise matrix multiplication, significantly reducing the computational cost.
Section 2 outlines the fundamental steps of the semi-discretization method and analyses its computational time complexity. Additionally, it briefly reviews prior advancements aimed at improving its efficiency. In Section 3, we introduce the multiplication free semi-discretization (MFSD) method, detailing the formulation of left and right mapping matrices for various time-period and time-delay ratios. Section 4 evaluates the computational performance of the proposed approach through high-resolution work-precision diagrams for both the conventional semi-discretization (SD) method and the introduced MFSD. The results clearly demonstrate that the new method achieves linear time complexity.
We’ve implemented our method in the publicly available
2. Main contributions
While the algebraic concept of direct matrix composition has been previously mentioned for specific cases (e.g. in Hamann and Eberhard (2018) for T = τ), its profound algorithmic implications have remained unrecognised. This study establishes MFSD as a comprehensive computational framework with the following core contributions: • • • •
3. Basics of the semi-discretization method
Consider the linear delayed dynamical system (Insperger and Stépán, 2011) of the form

Finding the stability of the system (1) requires the spectral properties of the mapping that maps Schematic representation of the semi-discretization method. The vector 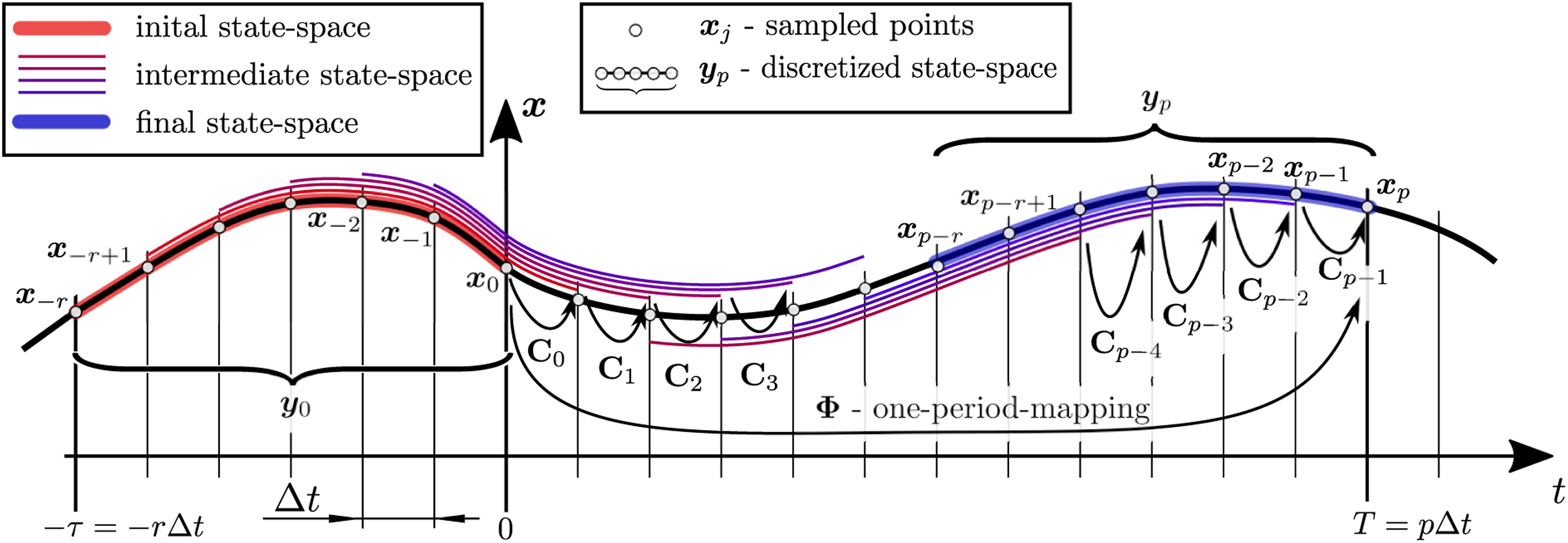
Using the discretised values


The usual selection for the number of the sampled points is
In order to capture the T-periodic mapping, the time increment Δt is required to be an integer fraction
The main idea of the semi-discretization method is that the time-varying components:

Using equation (4), the one-step mapping from

Starting from the initial discretized state

The transition over a full period T is governed by the Monodromy matrix (or Floquet transition matrix)

The stability properties of the trivial solution can be determined based on the spectral radius of the monodromy matrix (or Floquet transition matrix)
3.1. Time complexity of the semi-discretization method
The time complexity of the traditional semi-discretization method was thoroughly analysed in Henninger and Eberhard (2008). Here we will focus on the effect of the time-step Δt on the spectral radius (|μmax|) only. Note that both p and r are inversely proportional to Δt. The semi-discretization algorithm has the following key steps: • The computation of • The one-step matrices • The generation of monodromy matrix • The final step is to compute the eigenvalue with the largest magnitude of
The most critical part is the recursive matrix multiplication in equation (7), therefore, in the literature, many different methods were proposed to speed up this step. In the following section, we will present the most common ones.
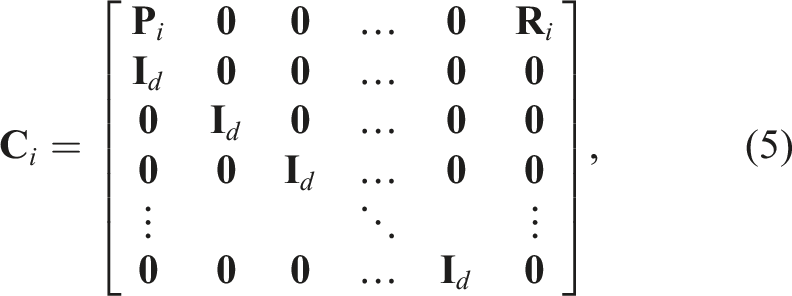
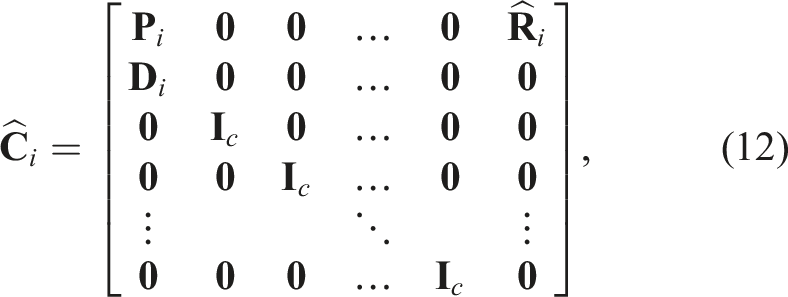
Following the history of the necessary state components only in many problems, not all the component of the delayed state


where

Exploitation of the matrix structure: In Henninger and Eberhard (2008), the recursive matrix multiplication of
Sparse matrix representation: It is observed that most of the elements of the matrix
Note that this sparse representation is not so efficient at the last few steps of the multiplication, where the resulting matrix typically becomes an almost full triangular matrix.
The improvements discussed above represent the most commonly adopted strategies to enhance the computational efficiency of the semi-discretization method. However, the authors are unaware of any other numerically validated optimisation that achieves a linear computational complexity.
4. Multiplication free one-period Mapping
In the following sections, the ‘Multiplication Free Semi-Discretization’ (MFSD) is introduced and analysed for different T/τ ratios. The linear time complexity is presented through a detailed numerical test, and it is compared to the Semi-Discretization method, both combined with a sparse matrix representation of the corresponding mapping matrices.
In the Semi-Discretization method, each multiplication with the one-step matrices
This type of direct composition was briefly presented for SD in Hamann and Eberhard (2018) for T = τ only. However, it was viewed primarily as an alternative algebraic representation with a disadvantageously larger state vector. Its banded structure and very sparse properties, its generalisation to arbitrary period-to-delay ratios, and its profound effect on reducing the computational time complexity to
The first step is to rewrite the one-step mapping (4) to the form: (top) Schematic representation of one-step equation of the semi-discretization method; (bottom) representation of all the equations of each time step (red and blue rectangle represent the collections of states which belong to the initial and final sampled state-space, respectively).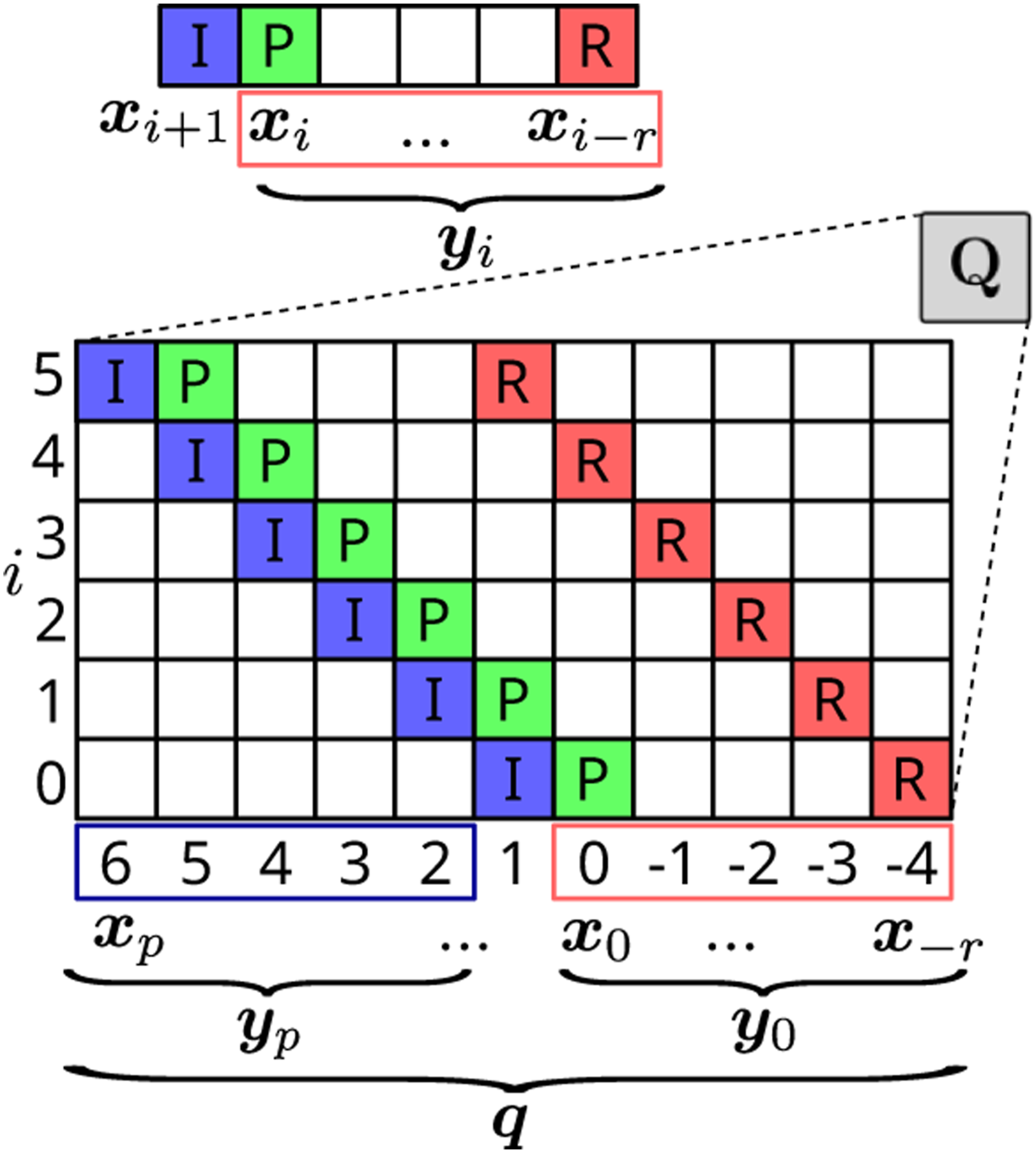


Repeating (14) for each index i ∈ 0, 1, …p − 1 yields the discretised
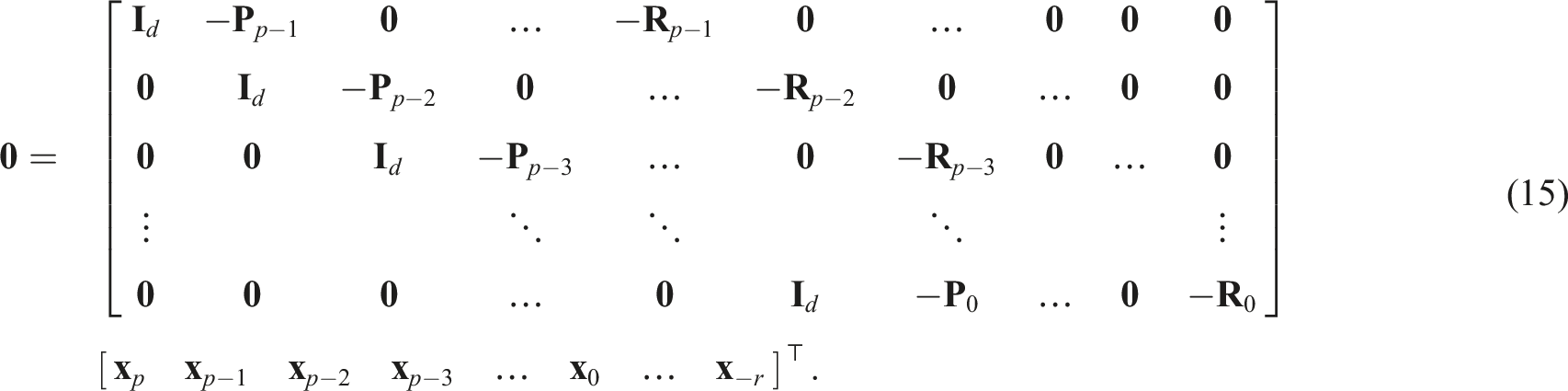
Note that the vector containing the discredited states from
The goal of the spectral analysis is to perform a mapping of the state-space one period later. Therefore, the extended state vector needs to be split into two components that correspond to Schematic representation of the aggregated matrix structure for different p and r values. (left) p − 1 = r, (middle) p − 1 > r and (right) p − 1 < r. 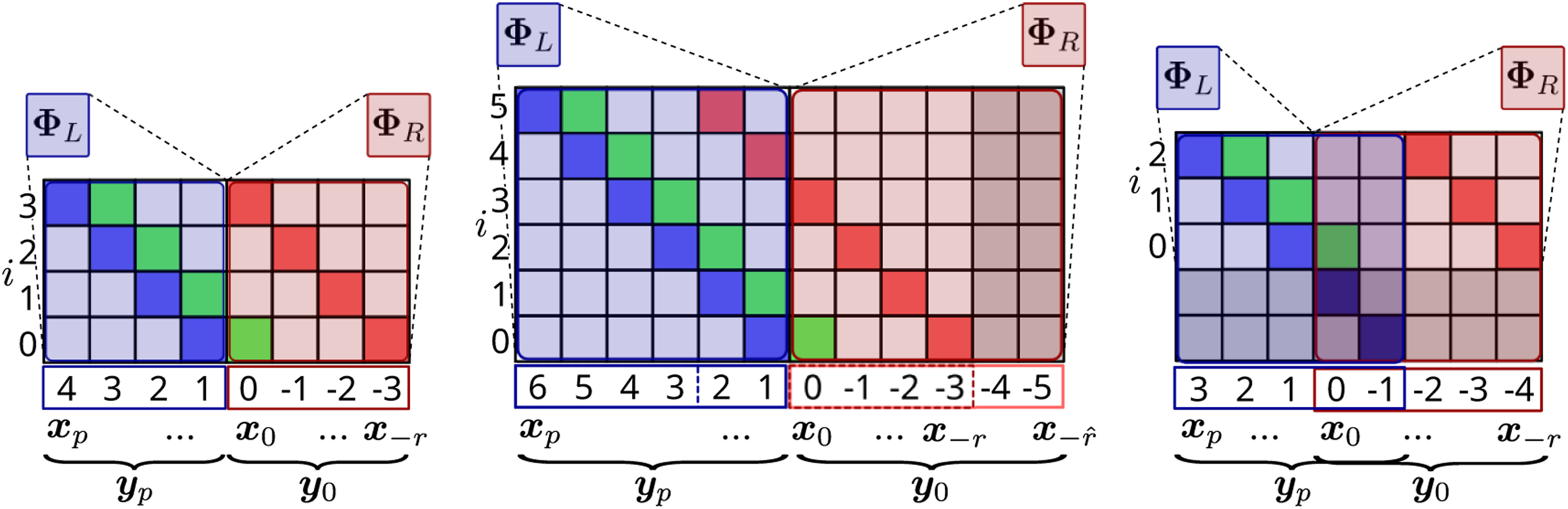
4.1. Partitioning of the equations for p − 1 = r
In this case, all the necessary elements of the sampled vector

The partitioned ‘left’ component of
However, in softwares specialised for numeric computations (e.g. Matlab, Julia), there is an option to compute the eigenvalues of
Note, that constructing the sparse
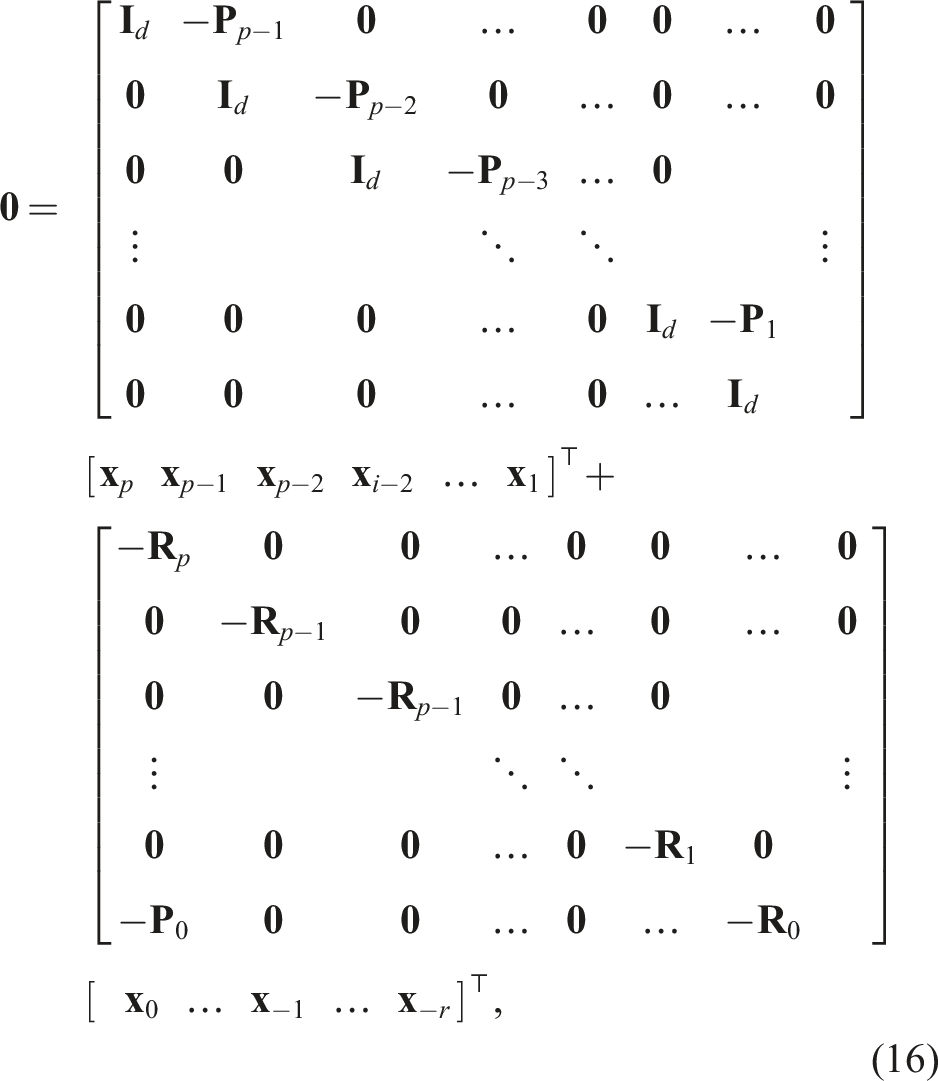
4.2. Partitioning of the equations for p − 1 > r
If the time period of the system is larger than the time delay T > τ, then p − 1 > r. In this case, the extended state vector
Although we use more states than the original method requires, thus
Note that expanding the state vector
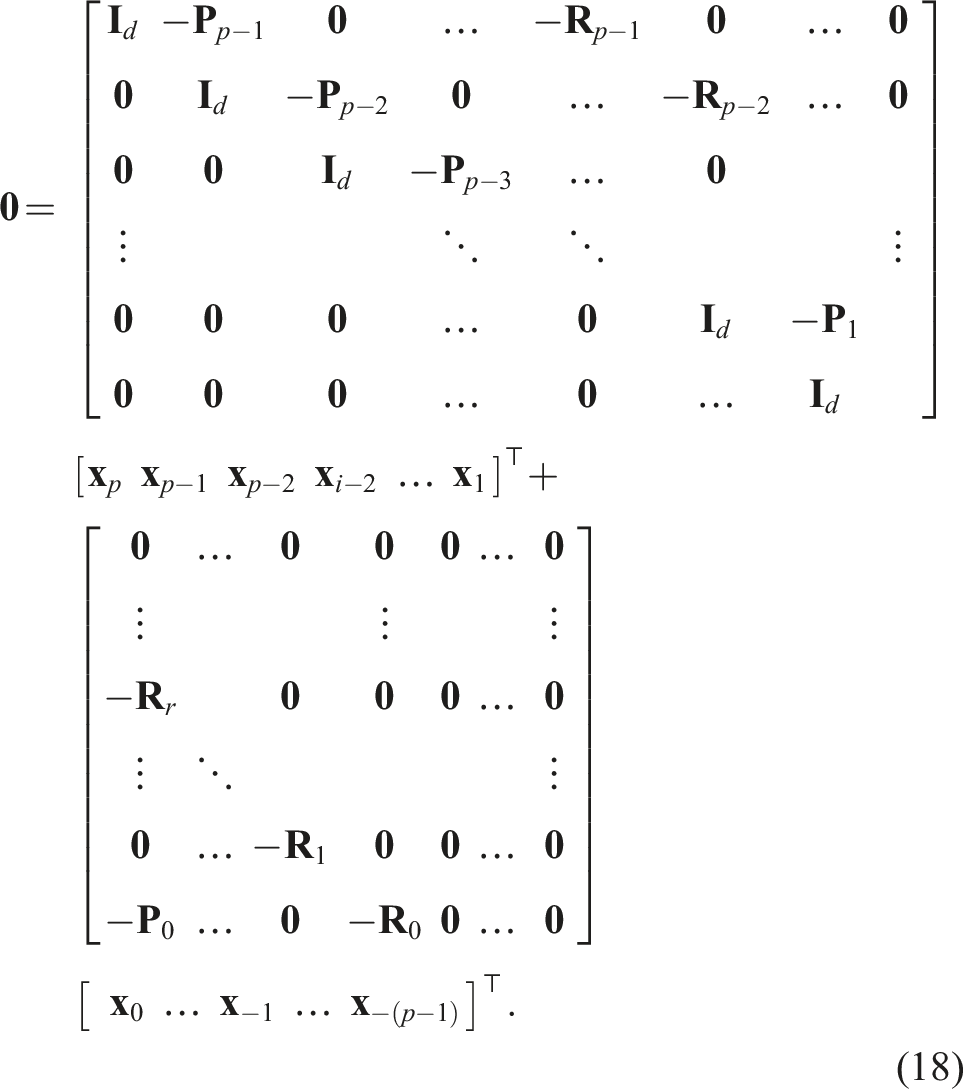
4.3. Partitioning of the equations for p − 1 < r
If T < τ and p − 1 < r, then there is an overlap between the
4.4. Comptuation of the periodic solution
In many cases, the investigated system has periodic external forcing:



Then the discresited time-periodic solution will be the fixed point

The stability of this fixed point can be determined based on the spectral radius
The construction of the matrices
Moreover, due to the special banded structure of these matrices, we anticipate that computing both the dominant Floquet multiplier and the periodic solution can be done with linear complexity when iterative methods such as Krylov subspace methods or Arnoldi iterations are utilised. These methods are particularly efficient for large, sparse matrices, as they construct solutions within Krylov subspaces, which reduces computational costs. These assumptions are substantiated by the numerical case studies presented in the subsequent section.
5. Numerical case studies
The introduced multiplication free semi-discretization method (MFSD) has been added to the
Note, we will analyse the CPU time only. Since the MFSD method is an exact algebraic rearrangement of the traditional SD mapping, the two methods are mathematically equivalent and MFSD introduces no new discretization errors. The numerical output of the built-in eigenvalue calculation (
5.1. Delayed Mathieu equation with forcing
Common test cases for the validation of numerical methods for time-periodic DDEs are variations of the delayed Mathieu equation (Kovacic et al., 2018). Therefore, this section is dedicated to a variation of this model: the Mathieu Equation with a delayed state and subjected to external periodic forcing, which has the form of

We compare the MFSD method to the highly-optimised, open-source implementation of the traditional Semi-Discretization, which performs the successive matrix multiplication equation (7) based on sparse matrices and calculates the largest eigenvalues and the fixed point. The time measurements are based on the
The variation of the measured evaluation times are also recorded, and are presented using the standard deviation with coloured areas for the cases where a sufficient number (>10) of evaluations was available. While the relative timing trends are of primary interest, for reproducibility, we specify the hardware configuration used in the tests: an Intel(R) Xeon(R) Gold 6154 CPU @ 3.00 GHz (36 cores) with 192 GB of RAM. All computations were performed using the Julia programming language and the
In Figure 4(a), we plot the CPU time as a function of the discretization resolution p for each step listed in Section Time complexity of the semi-discretization method (note: p ∼ 1/Δt). As discussed previously, the construction of all the submatrices Computation time of the traditional semi-discretization (SD) method (thin lines), and the multiplication free semi-discretization (MFSD) method (thick lines). The lines denote the mean values, and the coloured area denotes the corresponding ±1 standard deviation. Thin dashed black lines show the fitted curve. The parameters used during the tests are ζ = 0.2, δ = 3, ϵ = 3, b = −0.5, τ = 2π. (a); (b); and (c).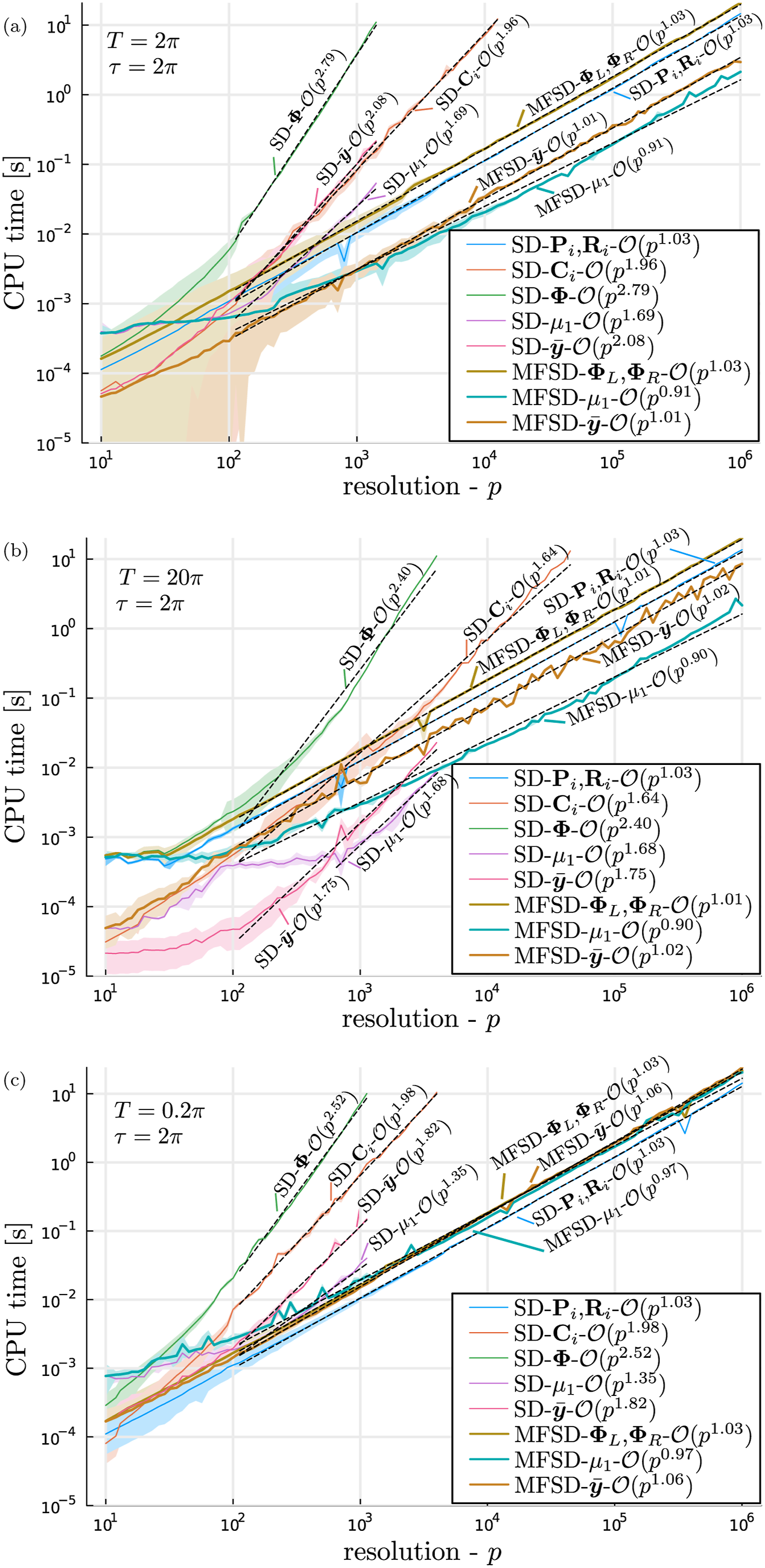
The CPU time of the MFSD method has four components. The first is identical to the computation of the
Figure 4(a) confirms that all the steps of the MFSD method have linear time complexity
Figures 4(b) and (c) compare the computation times for different T/τ ratios (10 and 0.1, respectively) to analyse the cases p > r and p < r discussed in Subsections Partitioning of the equations for p − 1 > r and Partitioning of the equations for p − 1 < r. The MFSD maintains linear time complexity, similarly to the case T = τ presented in Figure 4(a) because the number of
Further numerical examples for different system sizes (different values of d) and multiple delays are provided in the Appendix. All cases exhibit similar trends in the graphs; the different CPU time relative to Figures 4(a)–(c) is attributed to the different number of nonzero elements in the system matrices.
All numerical tests support the fact that the Multiplication Free Semi-Discretization has a shorter CPU time for every p parameter and has linear time complexity, leading to orders of magnitude faster computations for scenarios where accurate results are critical.
6. Conclusion
The development and analysis of the multiplication free semi-discretization method (MFSD) presented in this study marks a significant advancement in numerical methods for delayed differential equations. The MFSD method is integrated into the existing open-source
As the method maintains results in mapping matrices Φ L and Φ R with well-defined banded structures, it significantly reduces the computational time and resources necessary for the corresponding eigenvalue computations. This effect is especially prominent in cases where the traditional semi-discretization method exhibits quadratic or cubic time complexity.
The open-source implementation of the MFSD opens the way for the research community to make detailed calculations, where high resolution of the time period is essential to capture a system’s stability and steady-state behaviour accurately. This capability is particularly valuable in applications such as: • Machine tool vibrations in milling processes: In milling operations, the regenerative effect introduces delays due to the periodic engagement of cutting teeth, leading to complex dynamics that can cause chatter. Accurate modelling of the stability and periodic motions of these systems is crucial for predicting and mitigating such instabilities (Kiss et al., 2022; Sanz-Calle et al., 2024; Ding et al., 2011). • Networked control systems: In modern control systems, especially those distributed over networks, communication delays are inherent. These delays can significantly affect system stability and performance. Modelling and analysing these systems as time-delay systems help in designing robust controllers that can handle such delays effectively (Pan and Peng, 2024; Sun and Li, 2017). • The semi-discretization method continues to be actively utilised as a robust tool for stability analysis in complex recent mechanical engineering applications (Kumar et al., 2025). • Biological systems: delays often represent gestation or maturation periods. For example, in population dynamics, the reproduction rate at a given time may depend on the population size at an earlier time. Additionally, these models can exhibit time-periodic behaviour as a result of environmental cycles such as day/night rhythms or seasonal changes. Modelling these systems with delay differential equations allows for a more accurate representation of the biological processes involved (Smith, 2011; Arino et al., 2007). • Traffic systems: Delays are inherent due to driver reaction times, which can lead to complex dynamics such as stop-and-go waves and phantom traffic jams. These phenomena have been effectively modelled using DDES (Molnar and Orosz, 2024; Martinovich et al., 2025). Moreover, traffic systems often exhibit time-periodic behaviour due to factors such as traffic light cycles and daily commuting patterns. Modelling these periodicities is crucial for understanding and optimising traffic flow (Jiang et al., 2024; Bartfai et al., 2024).
These examples illustrate the broad applicability of the MFSD method in accurately capturing the dynamics of systems where delays and periodicity play a critical role.
In future work, the MFSD method will be extended to distributed delays; however, the linear time complexity of the MFSD method is expected to degrade. When addressing systems with distributed delays, the number of elements – and consequently the computational time – can increase quadratically with the discretization parameter p. However, in the case of distributed delays, the traditional implementation is also expected to exhibit a similar degradation in computational complexity, transitioning to a higher time complexity (e.g. from
While the current formulation of the MFSD method is tailored for retarded delay differential equations, extending its applicability to neutral and advanced types – based on the work presented in Bartfai et al. (2023) – is a promising direction for future research. This extension is compatible with the proposed MFSD method, so implementing it in the
The MFSD approach has the potential to generalise well to the stochastic semi-discretization method (Sykora and Bachrathy, 2020), for which the actual quartic time complexity
Furthermore, it is important to emphasise that the steps of the MFSD method are similar for the higher-order variations of the semi-discretization method, therefore resulting in similar performance.
Footnotes
Acknowledgements
We thank Henrik Sykora for creating the original implementation of the
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research leading to these results was supported by the Hungarian Scientific Research Fund (NKFIH 138500 and NKFIH-152125).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Notes
Appendix
This appendix presents three practical test cases from the literature, of increasing complexity, on which timing results are reported.
Appendix A introduces a minimal population model with seasonal effects: a first-order DDE featuring constant maturation delay, time-periodic mortality and recruitment rates, and external forcing.
The second example, in Appendix B, involves a two-degree-of-freedom turning system with two distinct time-periodic delays, inspired by a practical application: a parallel cutting configuration combined with spindle-speed variation.
The third example, in Appendix B, models the longitudinal vibration of a beam with delayed boundary feedback, discretised using finite element methods. This case represents a high-dimensional system with constant delay and time-periodic excitation.
Note that the aim of the appendix is not to derive detailed models or analyse system behaviour in depth, but rather to present CPU time results across models of varying size and structure using the proposed MFSD method. We refer readers to the cited literature for complete model formulations and theoretical background.