
Abstract
A coupled bending–torsional model of a rotating beam with an attached piezoelectric actuator and end mass is developed in this work. An integral sliding mode controller is designed to suppress coupled bending–torsional vibrations while maintaining the rotational speed, using a single collocated piezoelectric actuator–sensor pair. Since full-state feedback is required and direct measurement of torsional responses is challenging in rotating beams, a Kalman filter is incorporated to accurately estimate all system states. The proposed framework enables simultaneous control of bending and torsional vibrations in rotating smart beams subjected to external disturbances using minimal actuation and sensing. Numerical simulations demonstrate that the Kalman-filter-based integral sliding mode controller achieves superior vibration attenuation with reduced control effort, while ensuring robustness against uncertainties. The results highlight the potential of the proposed strategy as an efficient and robust approach for vibration control in rotating smart structures.
1. Introduction
The rotating beam with an end mass is widely studied as a simplified model of structures such as helicopter and turbine blades. Recent advances in smart materials have enabled active vibration control by bonding them to the beam surface, forming a smart beam capable of suppressing vibrations.
Brockmann and Lammering (2006) developed a comprehensive model for a rotating thin-walled beam with integrated piezoelectric fibers and stated that helicopter rotor blades are a potential application for such a model. They also proved that through aeroelastic couplings torsional actuation may influence the blade dynamics to suppress vibrations.
Bhadbhade et al. (2008); Bhadbhade and Jalili (2006) investigated coupled bending–torsional vibrations of a rotating beam with a piezoelectric actuator and tip mass, neglecting the hub radius, and mainly focused on dynamic response rather than mode shapes or eigenvalue loci.
Khodaei et al. (2018) experimentally extended this work, showing good agreement in the stationary case but discrepancies under rotation.
Recently, El-Masry and El-Badawy (2025) studied the axial-bending–torsional vibrations of a rotating beam with end mass and piezoeelctric actuator attached. They demonstrated that the presence of the end mass is a significant source of coupling between the bending and torsional vibrations. Moreover, they proved that such coupling affects the natural frequencies and modeshapes of the vibrating model which consequently affects the design of controllers.
Earlier studies employed linear control techniques for rotating smart beam vibrations Sun et al. (2004) developed a discretized model using the assumed modes method and applied combined PD and velocity feedback via piezoelectric actuators to control flapwise bending.
Yang et al. (2004) derived the finite element model for the flexural vibration of a rotating flexible beam with a piezoelectric actuator attached then a PPF (positive position feedback) controller was applied to the beam and MEF (moment exchange feedback) controller to the rotating hub simultaneously. Later, Spier et al. (2009) determined the optimal locations for the piezo patches and controlled the smart beam using displacement feedback.
In a more recent study, Beache and Fenili (2016) controlled the tip vibrations of a rotating smart beam using PD and LQR controllers at different positions of the piezoelectric actuator and compared the results. They proved that LQR controller is more robust than the PD controller.
Recently, Hashemi et al. (2022) developed LQR controller to dampen the transverse vibrations of a wind turbine blade using piezoelectric materials. However, all the previous studies have employed linear controllers with multiple actuators for vibration suppression.
Song and Gu (2007) designed a sliding mode controller for an aluminum beam using piezoelectric actuators and sensors, enhancing robustness through natural frequency variation. Xue and Tang (2008) argued that torque control is unsuitable for rotorcraft blades and proposed a sliding mode controller using piezoelectric actuation, treating motor torque as an external input. Overall, sliding mode control effectively handles model uncertainties.
Qiu and Xu (2016) derived the dynamics of two connected rotating beams and developed fast terminal and fuzzy fast terminal sliding mode controllers, experimentally demonstrating effective vibration suppression with reduced chattering. Later, Vakilzadeh et al. (2017) investigated classical and fractional-order sliding mode control to simultaneously suppress beam vibrations and track hub angular position, using three piezoelectric layers as sensors and actuators.
In the previous studies, they relied on using more than one piezoelectric actuator and several sensors to effectively suppress the unwanted vibrations. Moreover, none of the previous studies used the Kalman filter to estimate the unmeasured states.
(Na et al., 2011) analyzed a rotating tapered thin-walled beam and developed a sliding mode controller and observer to suppress flapwise and chordwise vibrations, showing superior performance over a linear quadratic Gaussian controller with Kalman filter.
Atmeh and Hasan (2012) used a Kalman filter to estimate natural frequencies of a flexible appendage on a rotating hub, while Camino and Santos (2019) developed a Kalman-filter-based LQG controller for tip deflection control. However, both studies considered only flexural vibrations and did not address coupled bending–torsional dynamics.
Recently, Rodriguez et al. (2022) proposed a multimodal sliding mode controller using multiple sensors and actuators, while Cui et al. (2022) developed an LQR-based controller for vibration suppression under uncertainty. However, both studies considered non-rotating cantilever beams and relied on multiple actuators and sensors.
This study proposes a multimodal vibration control strategy using a single piezoelectric actuator–sensor pair to suppress coupled bending–torsional vibrations in a rotating smart beam with an end mass. While bending vibrations are measurable, torsional vibrations are not; therefore, a Kalman-filter-based sliding mode controller is developed to estimate all states. Numerical results demonstrate effective vibration attenuation with minimal control effort.
2. Dynamic model
2.1. Kinematics
In this study, the coupled flapwise bending and torsional vibrations of a rotating smart beam are considered. The analytical methodology proposed by El-Masry and El-Badawy (2025) is adopted, excluding axial vibrations, with some key steps revisited here to derive the equations of motion for the present model.
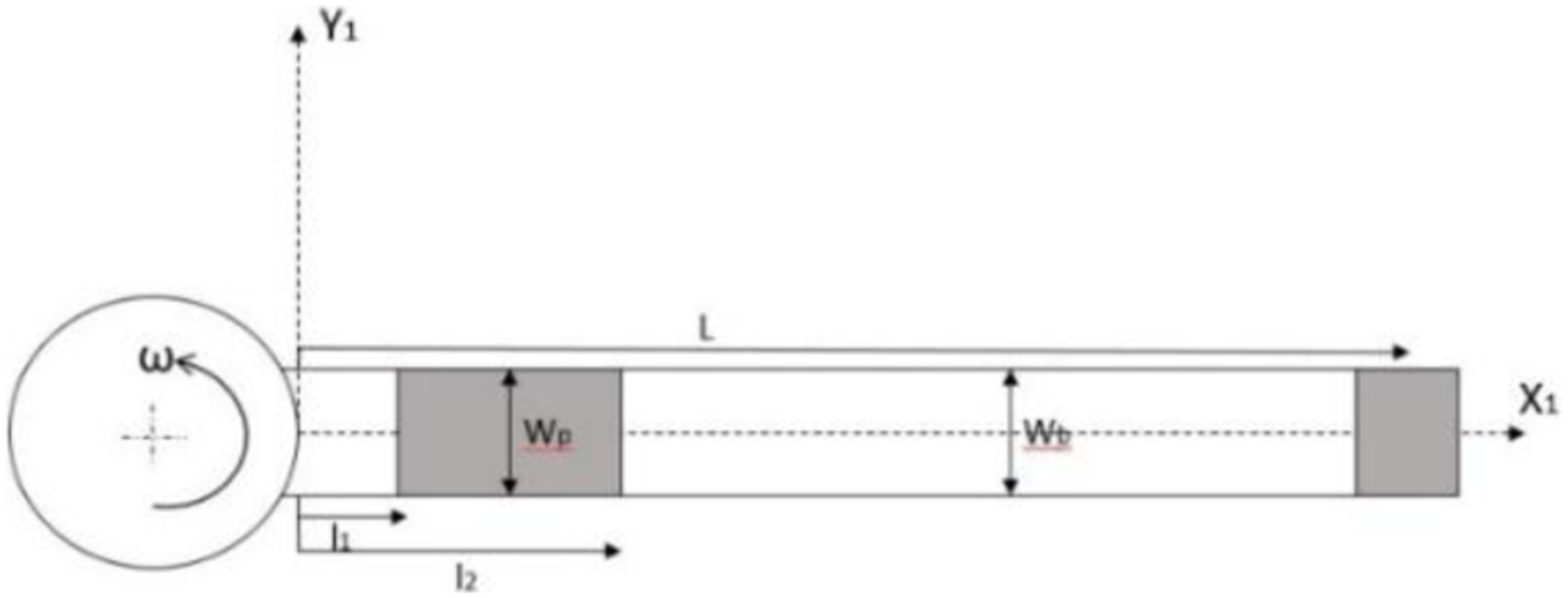
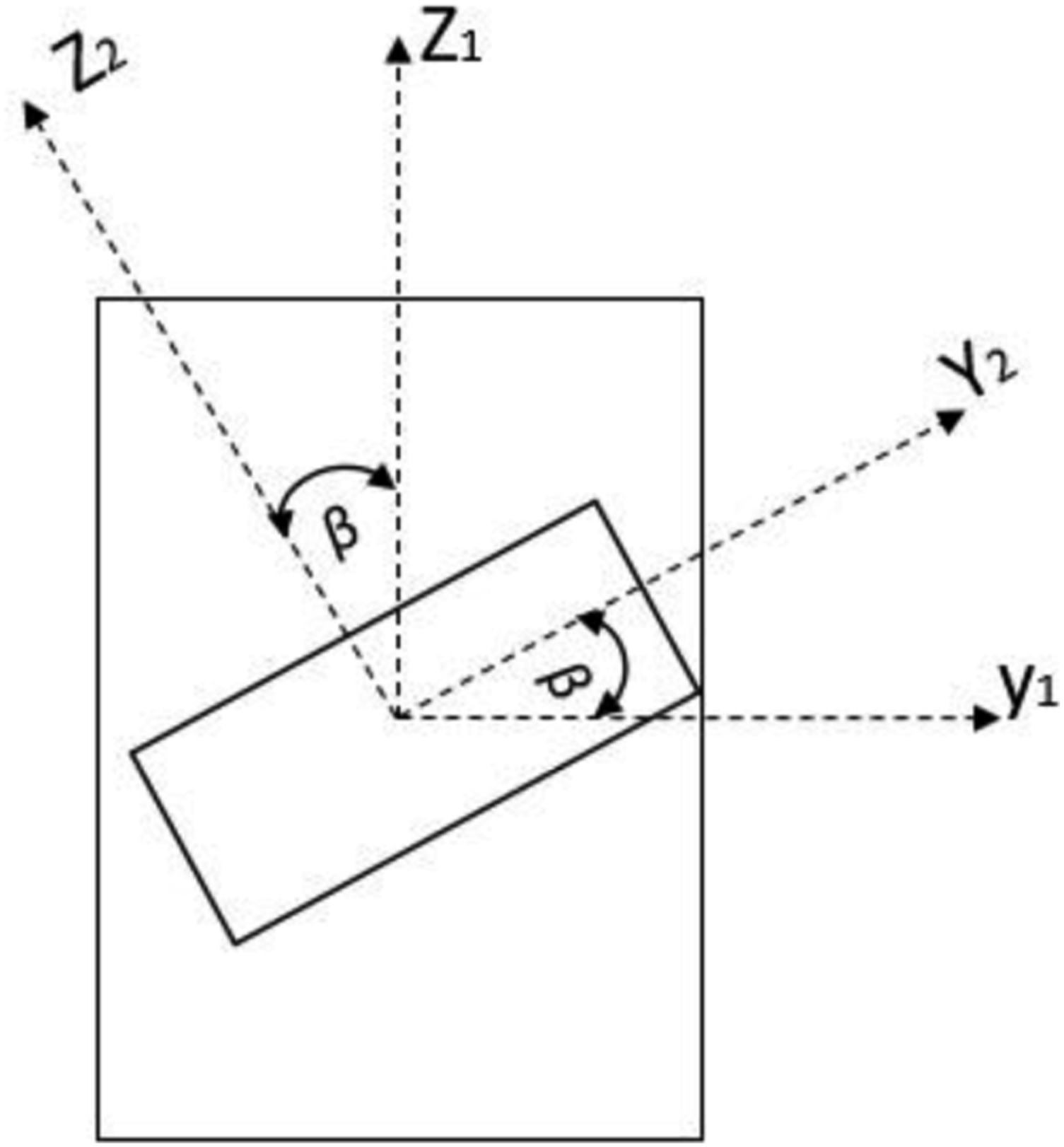
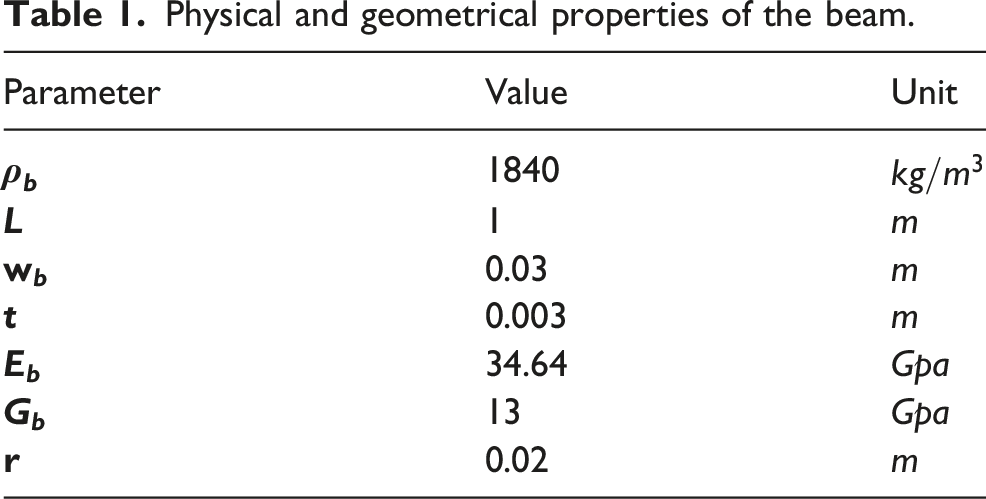
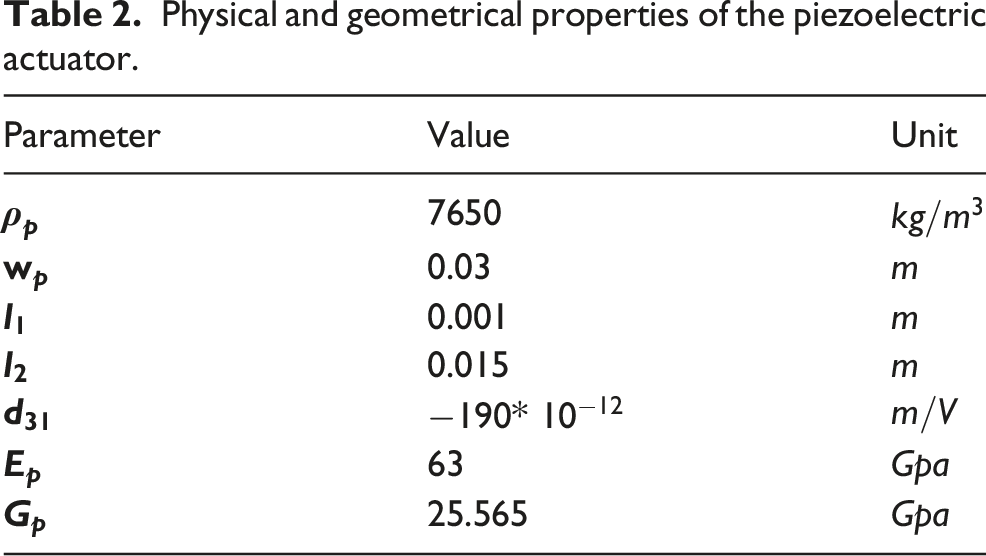
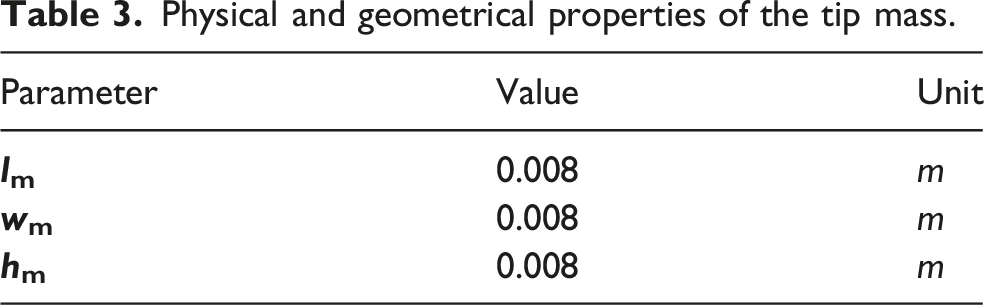
Two coordinate frames are used to model this beam, a fixed frame with an origin at the center axis of the hub (X0 Y0 Z0) and a moving frame that rotates with the beam (X1 Y1 Z1). In Figure 1, { Model of flexible smart rotating beam with tip mass. Top view showing the dimensions and the rotation of the smart beam with angular velocity ω. Side view showing the twist of the cross section by the angle of torsion Physical and geometrical properties of the beam. Physical and geometrical properties of the piezoelectric actuator. Physical and geometrical properties of the tip mass.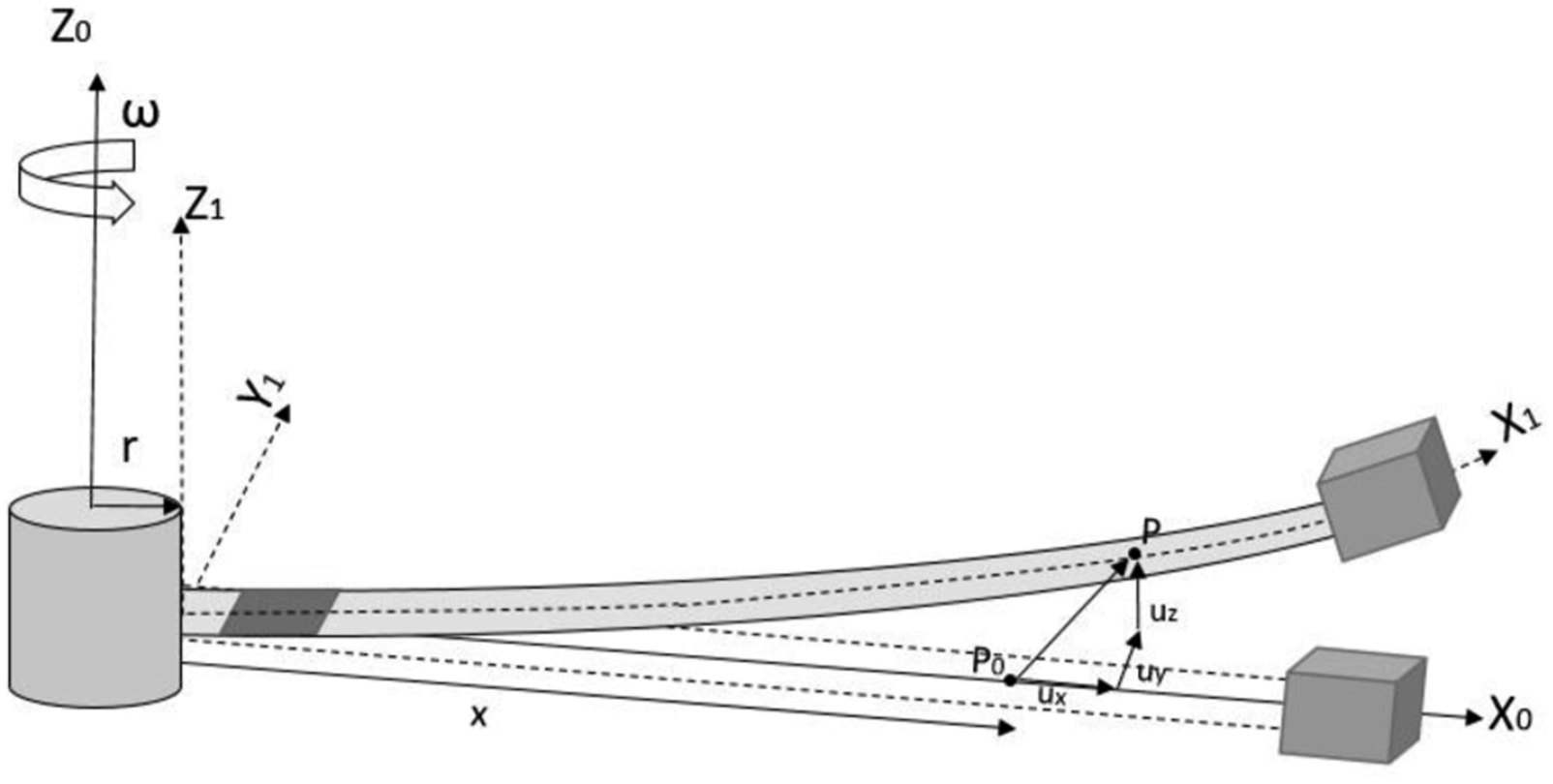
2.2. Equations of motion
The governing equations of motion are derived using the extended Hamilton’s principle stated as (Meirovitch, 2001)
The total kinetic energy of this model consists of that of the beam, the piezoelectric actuator and the tip mass. Products of inertia are neglected as the beam’s cross section is symmetric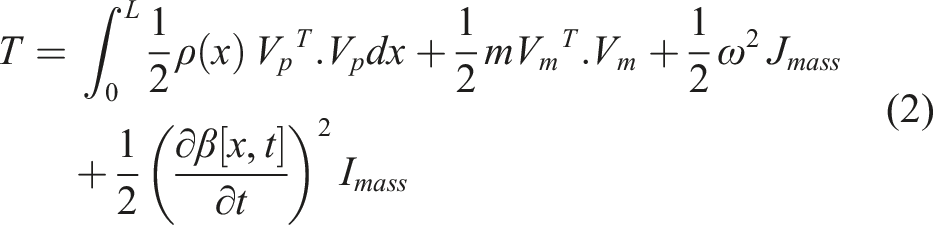

The total potential energy also consists of that of the beam and that of the piezoelectric actuator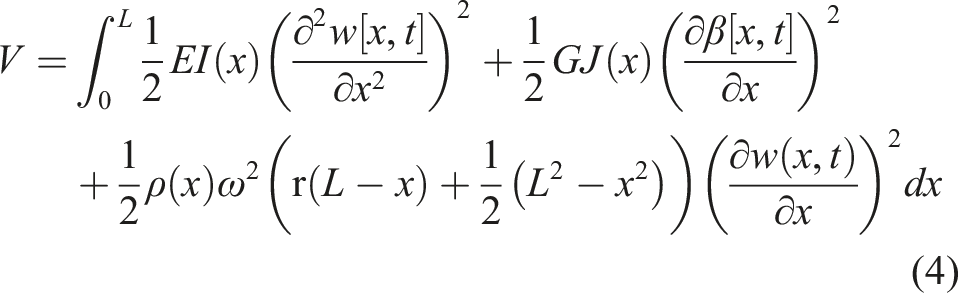



By substituting equations (2), (4), and (5) in equation (1), the equations of motion are derived as

The boundary conditions at the clamped end (


2.3. Non dimensional analysis
The governing equations presented in equations (7) and (8) and their boundary conditions in equations (9)–(12) are non-dimensionalized to simplify the mathematical analysis and be able to compare results with other references.
By introducing other non-dimensional parameters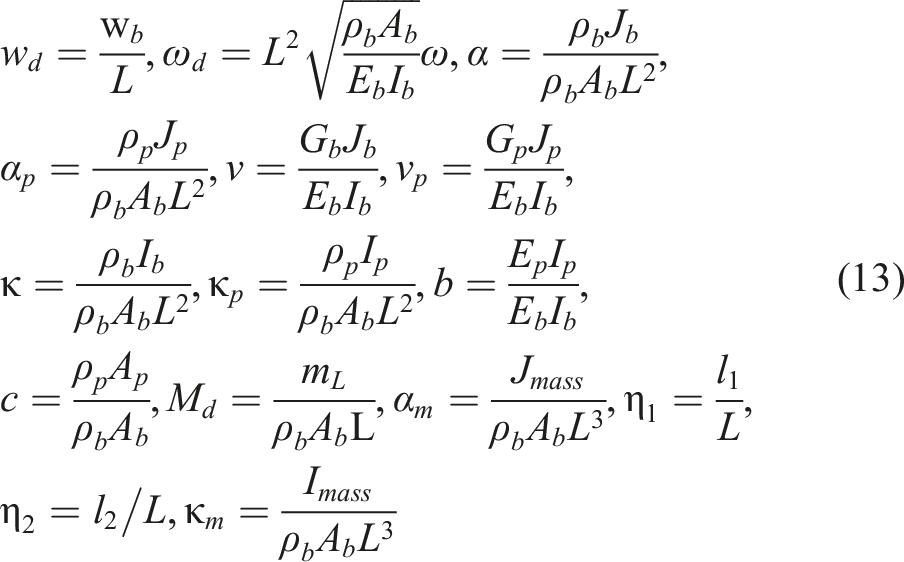
The non-dimensional equations of motion are represented as
The non-dimensional boundary conditions at (


2.4. Discretization
A non-dimensional reduced-order model is derived using the assumed modes method. Two modes (i.e., j = 2) are retained for bending and torsion, as they capture the dominant dynamics. Higher modes mainly introduce high-frequency effects with limited impact on control performance while increasing computational cost. This choice is validated in Section 4 using a three-mode model.
The bending and torsional assumed modes are chosen as

The admissible trial functions used here are the bending and torsion eigen functions of the conventional cantilever beam without rotation which are denoted as

By substituting equations (22) and (23) in equations (20) and (21) and substituting the resulting discretized modes in the non-dimensional governing equations (14) and (15), the discretized equations of motion become

3. Controller design
Previous studies often use multiple actuators to control different vibration modes, partly because torsional vibrations in rotating structures are difficult to measure for feedback (Khodaei et al., 2018; Qiu et al., 2021). To address this, a Kalman-filter-based controller is developed to estimate unmeasured states, enabling suppression of coupled bending–torsional vibrations using a single actuator.
For comparison, an integral sliding mode controller is first designed assuming full-state measurement, then combined with a Kalman filter where only one bending mode is measured and the remaining states are estimated. Since low-frequency dynamics dominate, the first two bending and torsional modes are considered. The framework is implemented in MATLAB/Simulink.
The general non-linear dynamics of the model considered in this study are represented in state space form as

For the controller design, the non-linear model is linearized and discretized as
Equation (28) is the assembled form of equations (24 and 25), where,
The disturbance term includes the model parameter uncertainties, which are multiplicative variations of the mass, gyroscopic and stiffness matrices in equation (28) represented as
Uncertainties are modeled as multiplicative to represent parametric variations in material properties, piezoelectric coefficients, end mass, and rotation-dependent terms. In rotating beams, centrifugal stiffening and gyroscopic effects scale system matrices, making multiplicative modeling more physically accurate than additive approaches.
Moreover, the disturbance includes a finite time pulse input, where in real life this simulates the effect of air turbulence or a shock and is represented as
From equation (29), defining 
Accordingly, the state equations are represented as
Then, the linearized state space form is represented as



3.1. Integral sliding mode controller
In this section, an integral sliding mode controller is designed based on the model in equations (35) and (36) to ensure robustness against the bounded disturbance in equation (30). It assumes full-state measurement of bending and torsional deflections and serves as a benchmark for comparison with the Kalman-based approach in Section 3.2.
The sliding surface of each mode is formulated following the approach presented by (Utkin and Shi, 1996). However, to be able to simultaneously control all modes using a single actuator, the individual mode sliding surfaces are combined into a single composite sliding surface that governs the overall system dynamics and is defined as

Since the controller is based on Lyapunov stability theory, the Lyapunov function is selected as
To ensure stability, the time derivative of the Lyapunov function should be negative definite



Summing over all modes yields

It is assumed that
Since we have only one actuator, we have a single control input 

By substituting equation (47) in equation (46), the control law is represented as
In this study, the state vector is ordered as in equation (31) such that the first four states (
3.2. Kalman-filter-based integral sliding mode control
A Kalman filter is employed to estimate all system states for the integral sliding mode controller, as shown in Figure 4. Kalman filter-based SMC diagram.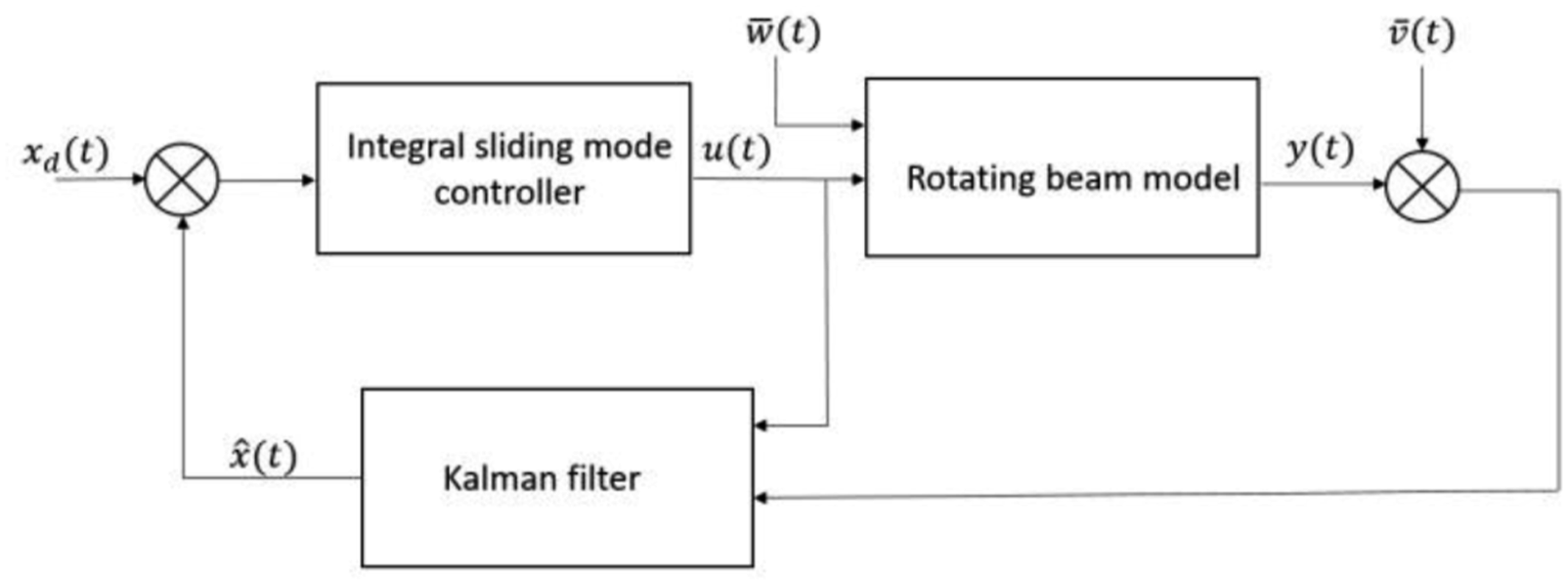
Let the estimation error be defined as
The estimation error dynamics are governed by
For asymptotic convergence, the estimation error dynamics must be stable. Under the detectability condition, the Kalman gain Real and estimated states (a) non-dimensional first mode bending deflection; (b) non-dimensional first mode torsional deflection.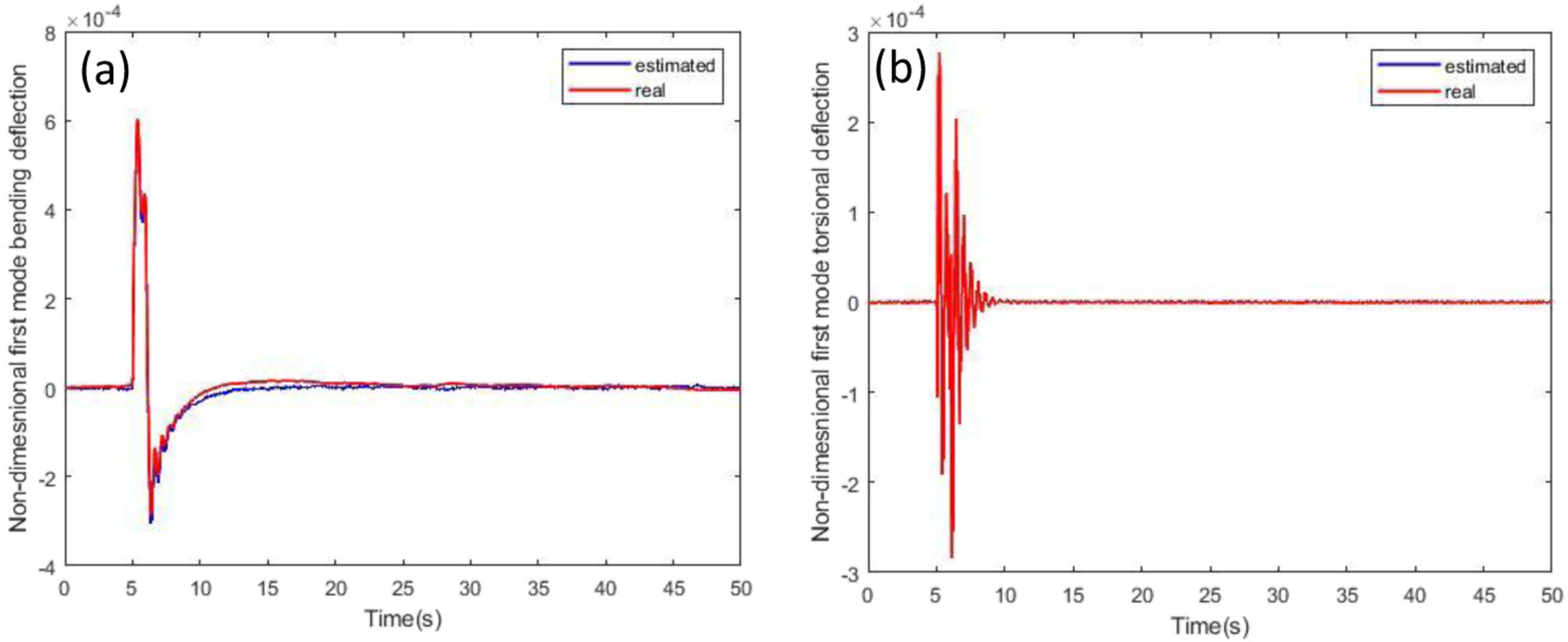
3.2.1. Kalman filter design
A continuous-time Kalman–Bucy filter is designed to estimate the unmeasured states of the system in equations (26) and (27), accounting for process disturbances and measurement noise, both modeled as zero-mean Gaussian white noise with covariance matrices
The continuous Kalman filter estimates the system states as

The covariance matrix 
The process noise covariance matrix 
The process noise is applied only to the torsional rate states to reflect uncertainties in the torsional dynamics, which are not directly measured. The measurement noise covariance 
Measurement noise is included for the bending displacement sensors to account for sensor inaccuracies and unmodeled disturbances. The values of the covariance matrices
As shown in Figure 5, the estimated states closely follow the actual states obtained from the simulations, confirming the effectiveness of the designed Kalman filter.
3.2.2. Integral sliding mode controller design
In this section, an integral sliding mode controller is designed based on the estimated states obtained from the Kalman filter.
For a system with 


The sliding mode controller follows the same stability conditions and control law as in Section 3.1, with the actual tracking error
Substituting the control law into the sliding surface dynamics equations (56)–(58) yields

Therefore, the Lyapunov stability condition in equation (48) is satisfied ensuring that the states of the system are driven toward the sliding surface (Figure 6). Sliding surface time response.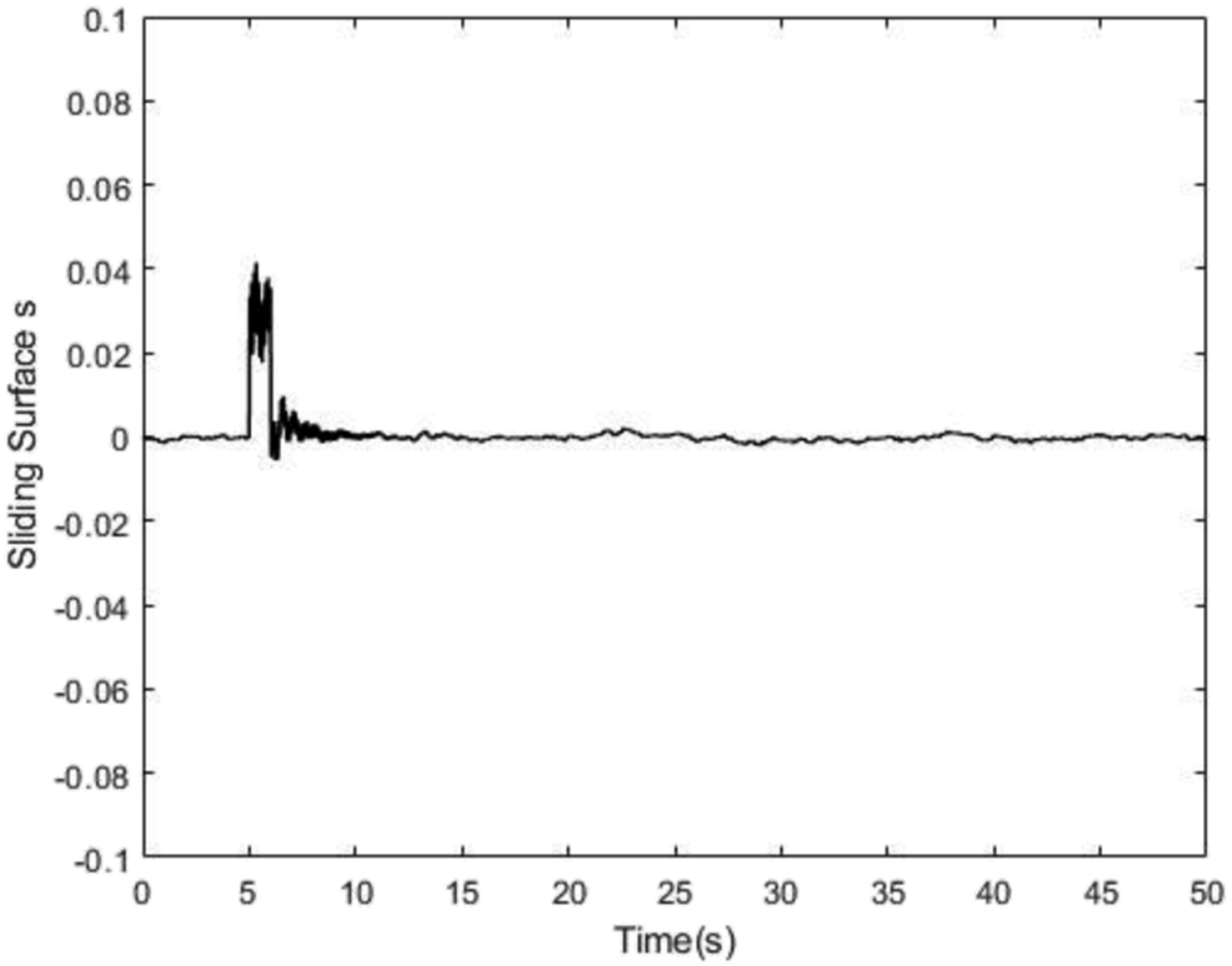
Furthermore, Figure 5 shows the time evolution of the sliding variable. The pulse observed at
4. Results
The proposed controller suppresses coupled bending–torsional vibrations using a single piezoelectric actuator while estimating unmeasured states, reducing reliance on multiple sensors without altering system dynamics. It also demonstrates effective multimodal vibration suppression.
To evaluate performance, a rotating beam with an attached piezoelectric actuator–sensor pair is tested at a non-dimensional speed Uncontrolled and controlled (a) non-dimensional first mode bending deflection; (b) non-dimensional second mode bending deflection. Uncontrolled and controlled (a) non-dimensional first mode torsional deflection; (b) non-dimensional second mode torsional deflection. Uncontrolled and controlled (a) non-dimensional first mode bending velocity; (b) non-dimensional second mode bending velocity. Uncontrolled and controlled (a) non-dimensional first mode torsional velocity; (b) non-dimensional second mode torsional velocity.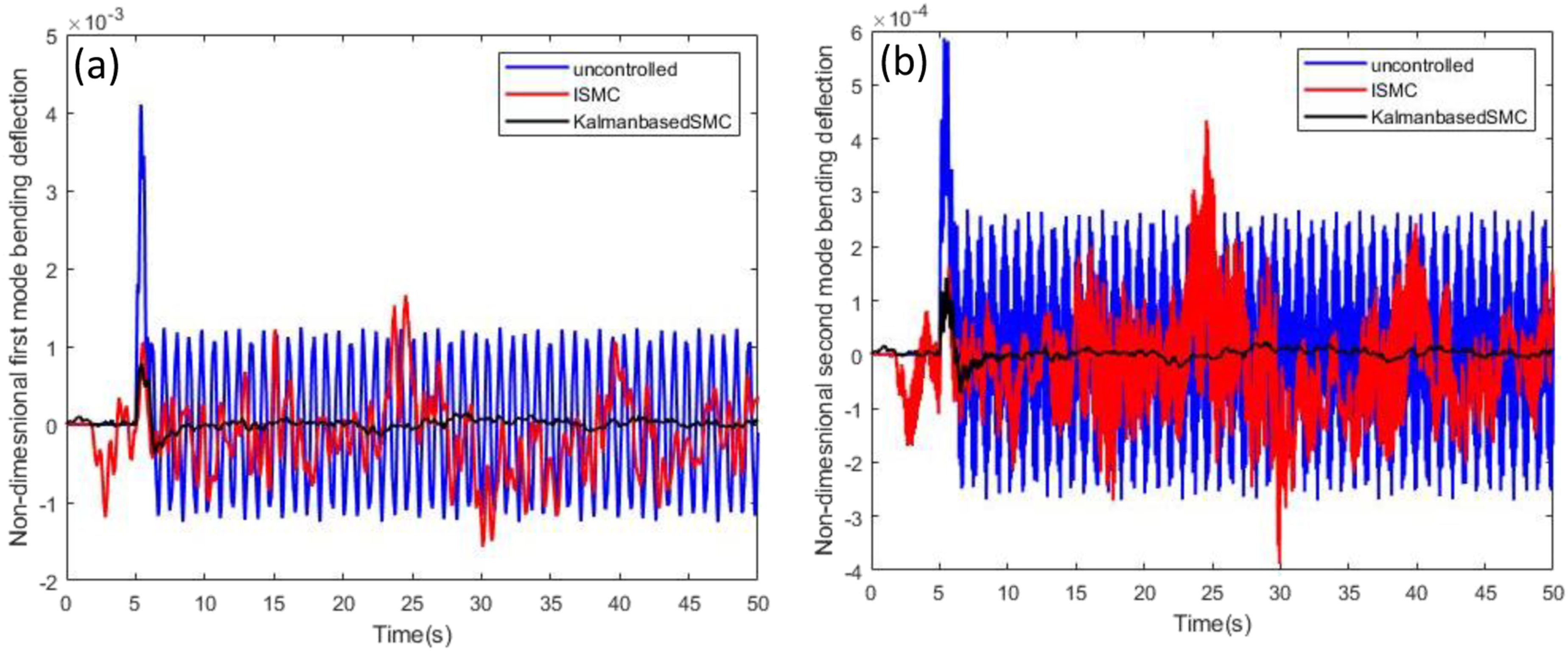
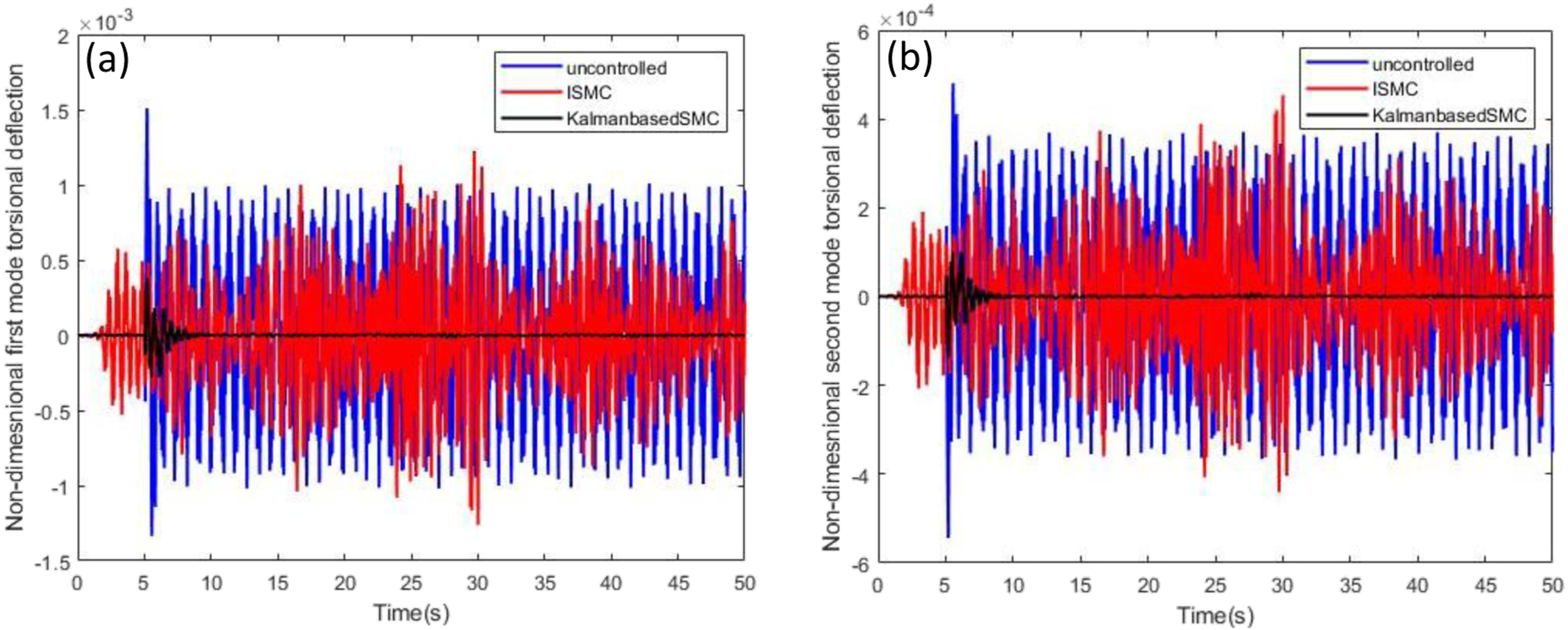
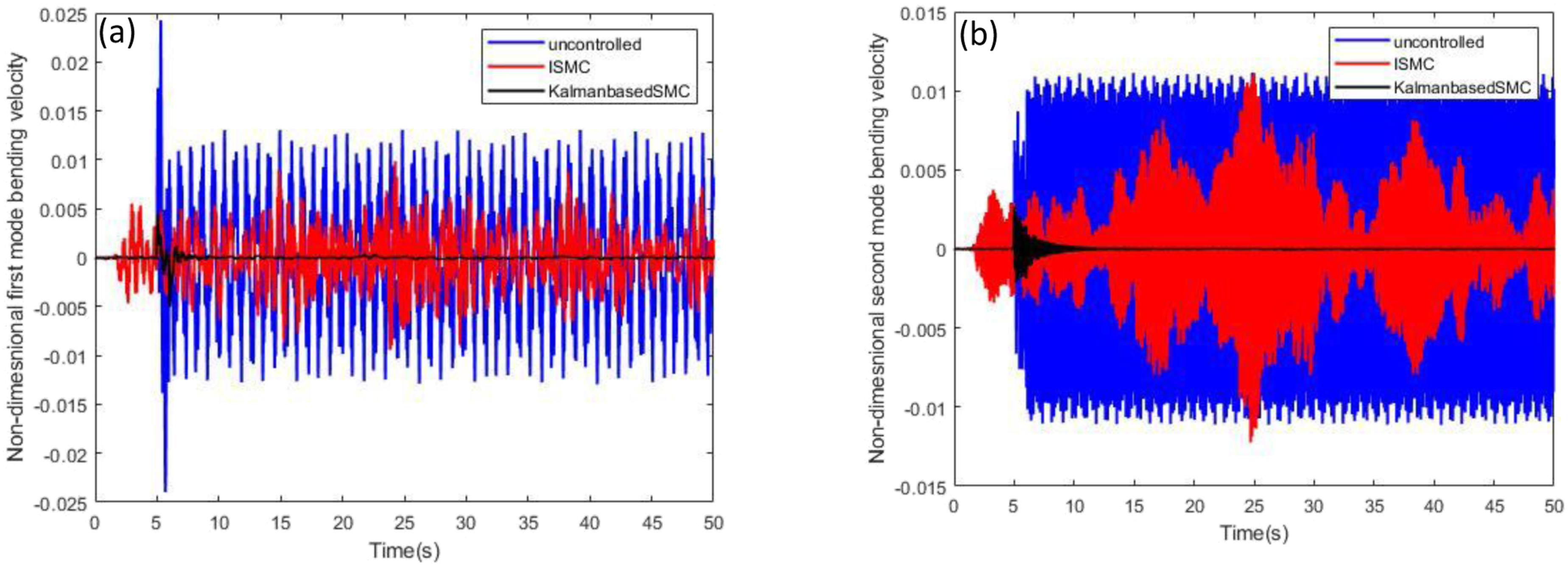
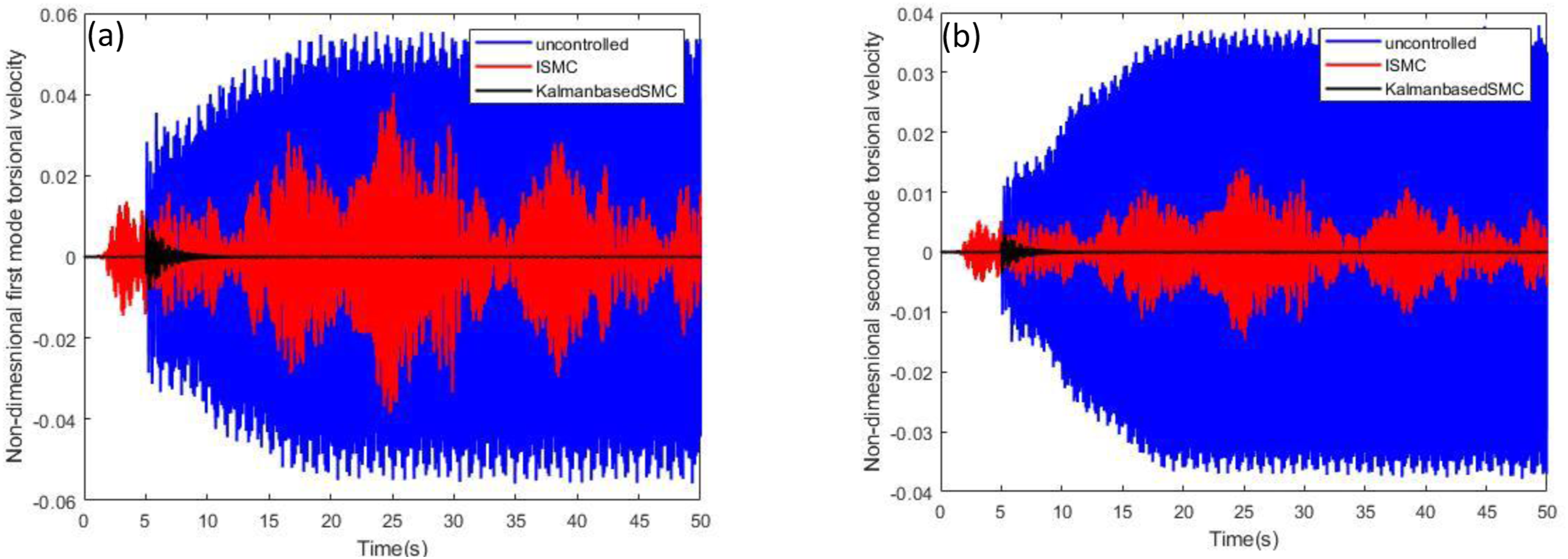
Figure 11 shows that this improved performance is achieved with lower and smoother control effort. High-frequency activity in the control signal arises from bending–torsional coupling and model uncertainties but remains continuous and bounded. Control effort for the integral sliding mode controller and the proposed controller.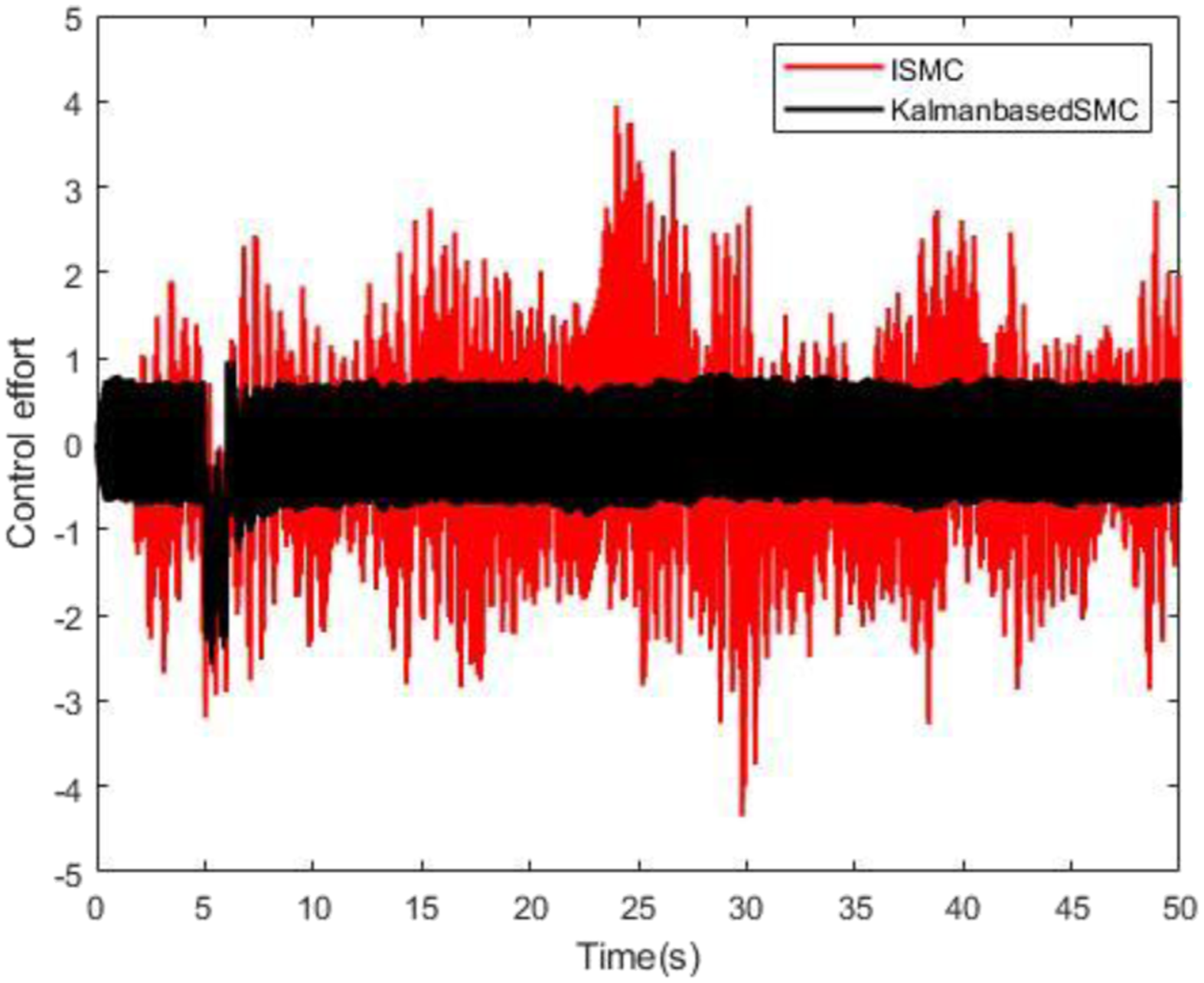
The Kalman-based SMC achieves up to 80% reduction in vibration amplitude, compared to 30–50% for ISMC, with significantly reduced chattering.
Figure 12 shows the frequency-domain response of the bending displacement before and after control. A dominant peak at approximately 3.6 Hz, corresponding to the first bending mode, is clearly observed in the uncontrolled case and significantly attenuated under the proposed controller. The amplitude is expressed in non-dimensional form. Frequency-domain response of the transverse displacement for uncontrolled and controlled cases.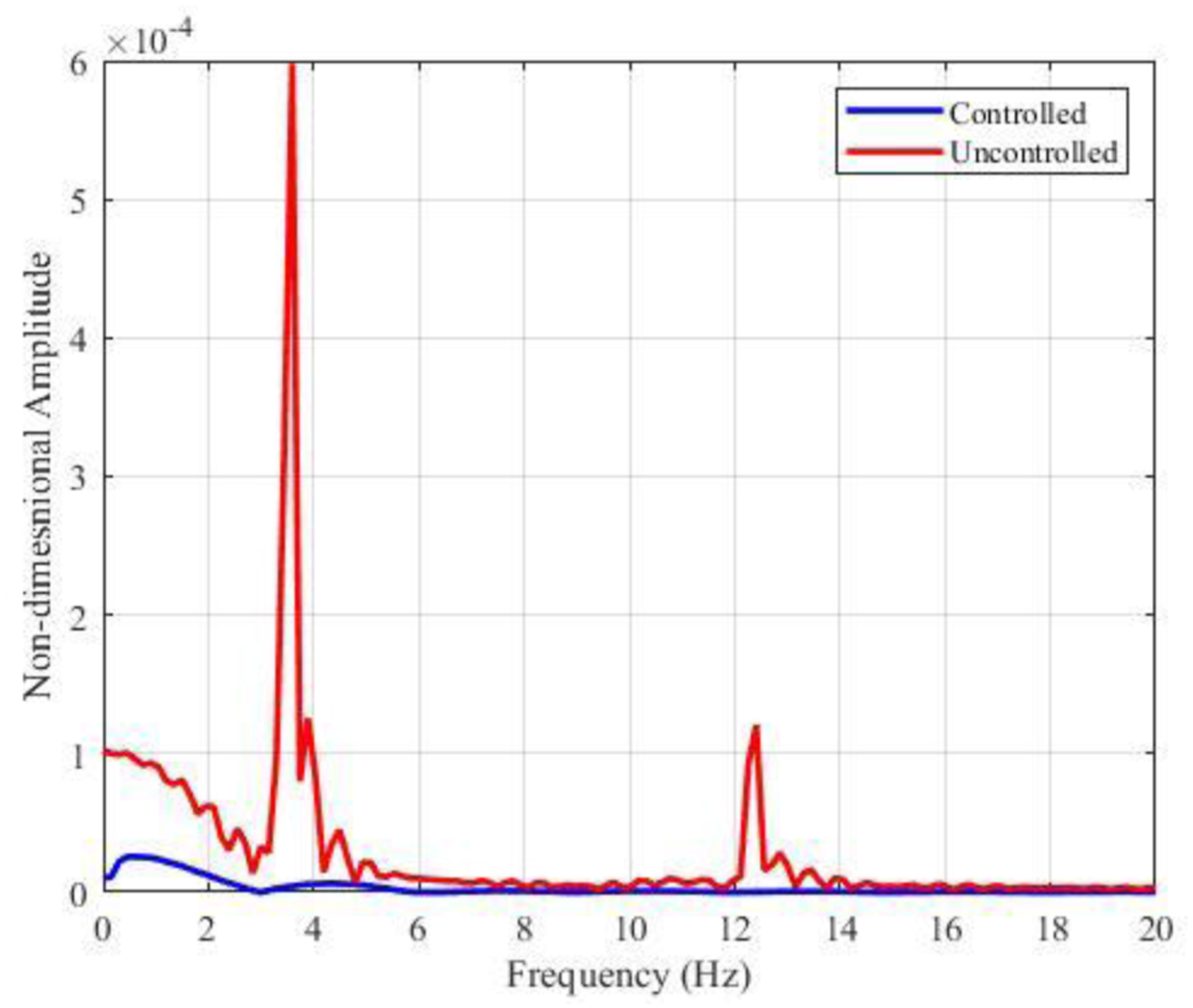
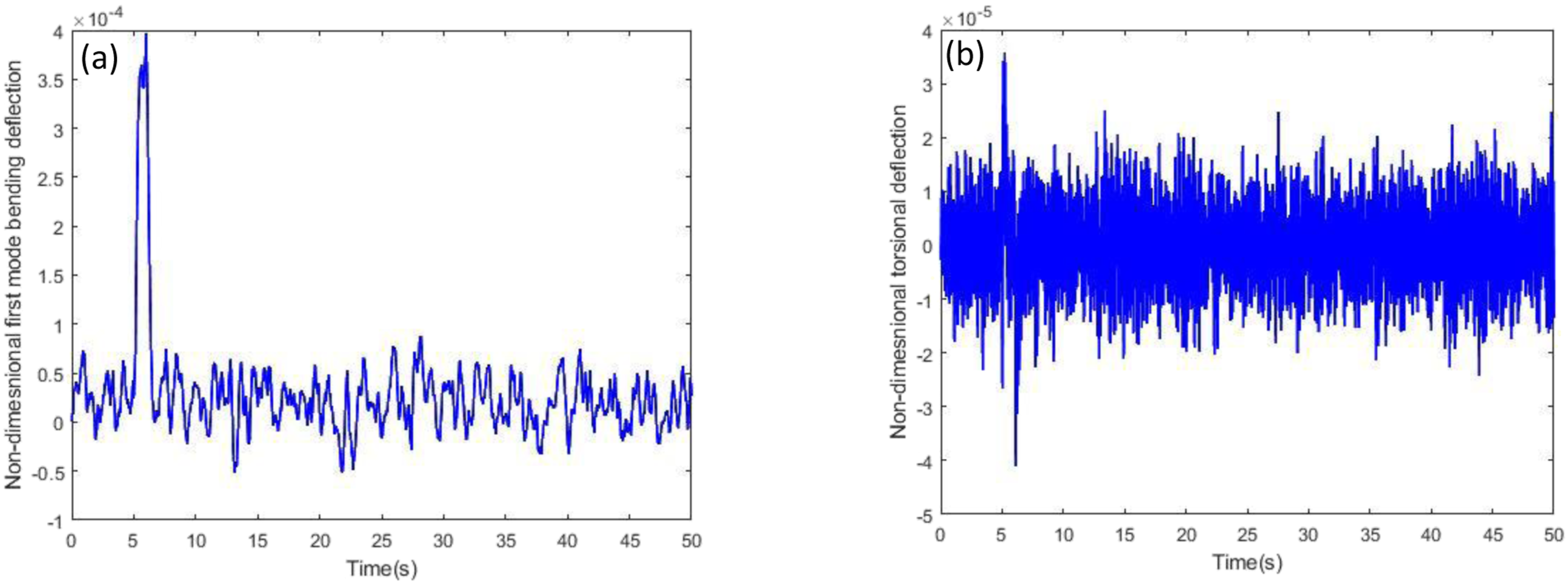
To validate multimodal performance, the controller is applied to a three-mode model under identical conditions. Figures 13 and 14 show effective suppression of both bending and torsional vibrations despite additional high-frequency dynamics. Uncontrolled and controlled (a) non-dimensional first mode bending displacement; (b) non-dimensional first mode torsional displacement for the 3 modes model. Closer view for the controlled response (a) non-dimensional first mode bending displacement; (b) non-dimensional first mode torsional displacement for the 3 modes model.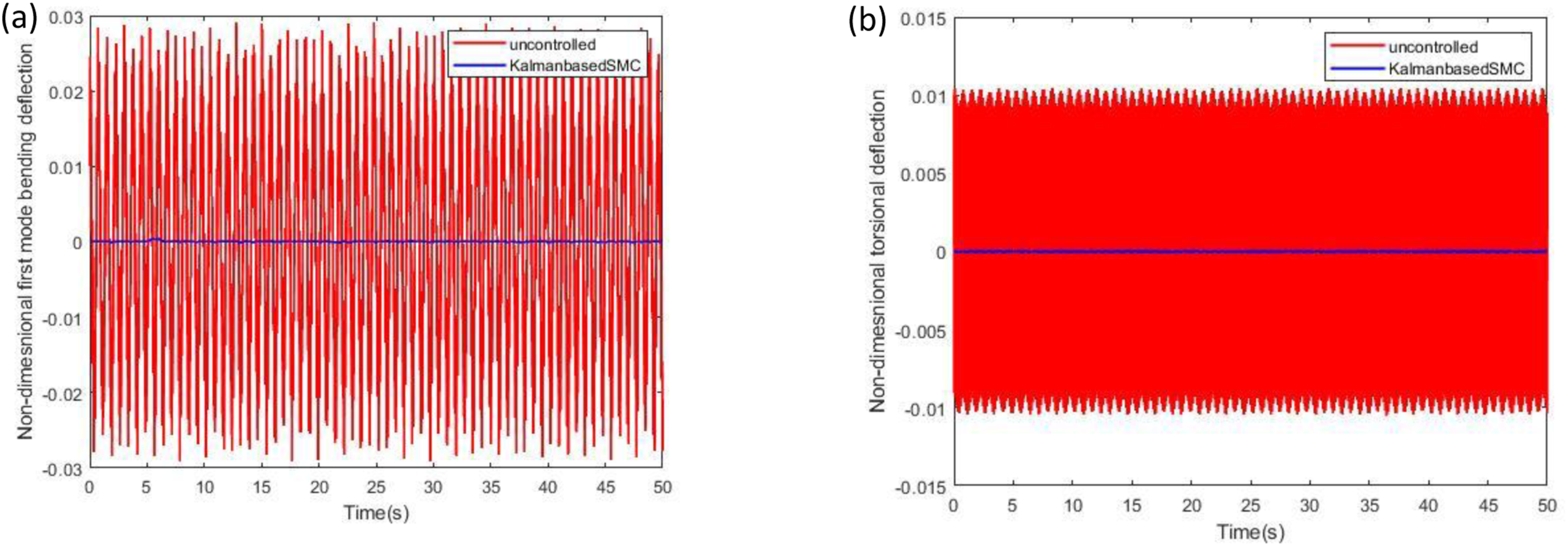
A comparison with a classical PID controller is also conducted. Due to its SISO structure, PID mainly regulates bending with limited torsional suppression, whereas the proposed method achieves effective attenuation of both responses using a single actuator, as shown in Figure 15. PID vs Kalman based SMC controlled response (a) non-dimensional first mode bending displacement; (b) non-dimensional first mode torsional displacement for the 2 modes model.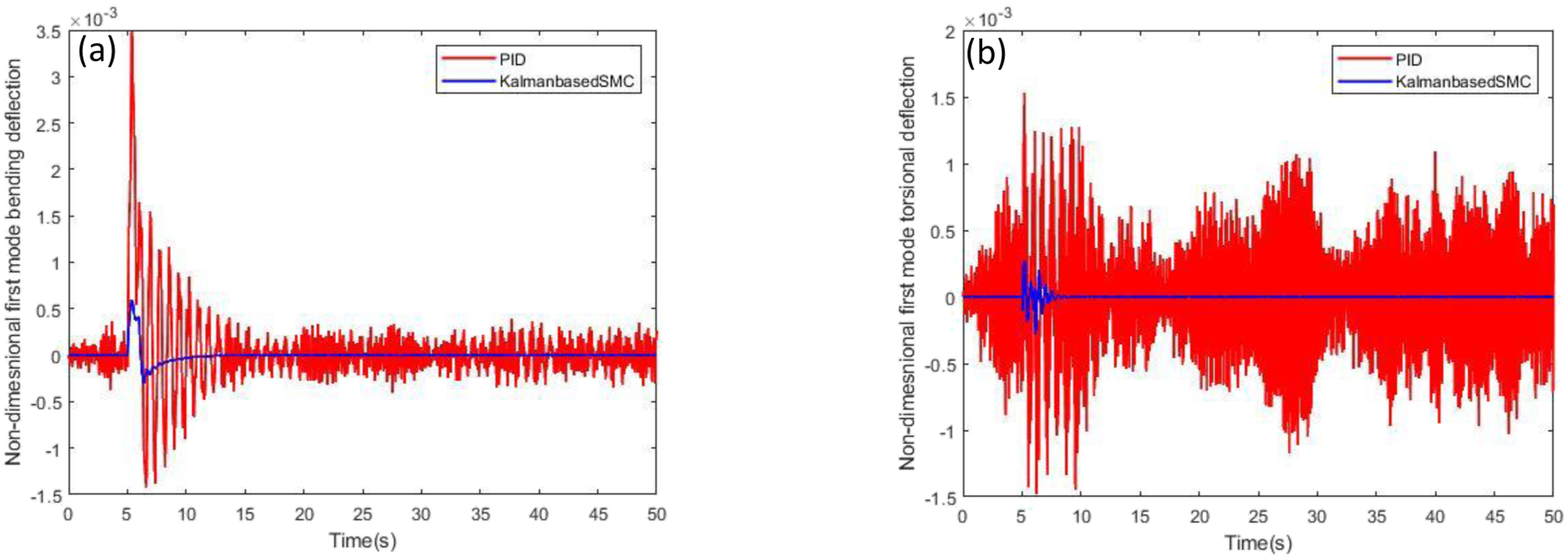
5. Conclusion
This study presents an effective vibration suppression strategy for a rotating smart beam with an end mass using a single piezoelectric actuator and an integral sliding mode controller. A key contribution is the use of a single actuator to control coupled bending–torsional vibrations, typically requiring multiple actuators. To address unmeasured torsional states, a continuous-time Kalman filter is used for full-state estimation.
Numerical results demonstrate significant attenuation of both bending and torsional vibrations, with the Kalman-filter-based controller achieving superior performance and lower control effort. By exploiting gyroscopic and end-mass-induced coupling, the approach enables efficient multimodal control with minimal actuation. This provides a practical solution for smart structures with sensor and actuator limitations.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.