
Abstract
While development of control strategies for building systems has gained considerable attention in the field of structural and earthquake engineering, it remains a challenging task due to the complexity of the problem and the high computational costs involved. This paper presents a novel methodology that integrates dimensional analysis with generalized linear matrix inequalities (GLMIs) to design robust control strategies for benchmark building structures subjected to seismic excitations. By applying the Buckingham Π Theorem, the approach identifies key dimensionless groups, simplifying the representation of complex structural behavior and enabling systematic controller design even under significant uncertainties. The GLMI framework ensures robust performance across a variety of physical parameters, including mass, stiffness, and damping perturbations. The efficiency of the proposed methodology is demonstrated through numerical simulations on twenty-story high-rise benchmark steel structure inspired by the SAC project in Los Angeles, California. The study focuses on uncertainties in top-floor mass, and compares the performance of the proposed controllers with passive, and linear quadratic regulator (LQR) strategies. Results show that the presented control scheme achieves reliable seismic control by effectively handling parameter uncertainties while maintaining structural safety. This work provides a clear, systematic framework that balances technical rigor with accessibility, offering practical guidance for engineers and a comprehensive reference for researchers in advanced structural control.
Keywords
1. Introduction
In recent years, the synthesis of robust control strategies for building systems has gained considerable attention in the field of structural and earthquake engineering. High-rise buildings constitute essential components of modern civil infrastructure, and ensuring their safety under dynamic excitations such as wind and earthquake loads remains a fundamental engineering challenge. The robust control of such systems is crucial to guarantee both stability and satisfactory performance in the presence of modeling uncertainties and unpredictable external disturbances. These challenges are further amplified by nonlinear dynamics, structural complexity, and parameter variability, which collectively demand control methods capable of maintaining reliable performance under uncertain real-world conditions.
Several researchers have investigated various active (Ramírez-Neria et al., 2022), robust (Zhang et al., 2025), and intelligent control (Zand et al., 2023) strategies to mitigate seismic responses in building structures. For instance, Galaz-Palma et al. (2023) developed an observer-based approach for estimating displacements, velocities, and seismic forces using Lyapunov theory. In another study, Umutlu et al., 2024 enhanced active tuned mass damper (ATMD) performance through improved control algorithms validated by numerical simulations. Saadatfar et al. (2023) introduced an adaptive sliding sector controller that achieved superior seismic response mitigation in an 11-story building. Similarly, Zamani and Etedali (2023) designed an ANFIS-based robust controller for tall buildings considering soil–structure interaction effects. Xu et al. (2023) proposed a fuzzy fractional-order sliding mode control strategy ensuring global stability under uncertainty, while Panda et al. (2022) employed reinforcement learning to develop a full-order PI controller for seismic response control. In addition, Miyamoto et al. (2022) formulated a robust tuned mass damper design method based on linear matrix inequalities (LMIs) for enhanced stability and adaptability. Earlier studies have also explored intelligent semi-active damping devices for seismic mitigation. Xu and Shen (2003) proposed an intelligent bi-state control strategy for structures equipped with magnetorheological dampers, demonstrating improved earthquake response reduction while overcoming time-delay limitations of conventional semi-active control systems. Furthermore, Shi et al. (2018) developed an optimization-based tuned mass damper design using an artificial fish swarm algorithm, showing enhanced robustness and vibration suppression efficiency compared with classical tuning approaches. Although these studies demonstrate the potential of robust and active control techniques, three major challenges remain: (i) scalability and transferability of controllers across different building scales, (ii) computational complexity in high-dimensional optimization problems, and (iii) the lack of a unifying framework that links physical modeling with dimensionless control synthesis.
The literature suggests that while robust control significantly enhances system stability and performance, most formulations are still expressed in dimensional form, making them dependent on specific geometric or material scales. This limitation hinders generalization and complicates controller re-tuning for structures with varying physical properties. To bridge this gap, dimensional analysis and the Buckingham Π theorem provide a systematic way to establish relationships among variables through the derivation of dimensionless groups, offering a path toward scalable, physically consistent control design (Oppenheimer et al., 2023). Previous studies have successfully applied dimensional analysis in various mechanical and structural contexts (Qin et al., 2025), including vibration mitigation (Karimi et al., 2021), fault diagnosis (Patil et al., 2022), and bearing dynamics (Suryawanshi et al., 2021). Málaga-Chuquitaype (2015) estimated seismic displacements, emphasizing dimensionless modeling, and later developed fragility functions for earthquake-sensitive structures (Málaga-Chuquitaype et al., 2019), as well as studied seismic responses of eccentric structures under various loading conditions (Málaga-Chuquitaype, 2021). Ortiz-Palacio et al. (2024) established a strong correlation between dilatational wave velocities and penetration test results using multivariable analysis. The Buckingham Π Theorem, as a fundamental outcome of dimensional analysis, provides a systematic approach for determining the functional relationships between variables in a system (Tang et al., 2020). By identifying dimensionless Π groups using the theorem, engineers can derive non-dimensional parameters that are crucial for understanding system behavior and designing control strategies (Deng et al., 2025). In parallel, the Linear Matrix Inequalities (LMI) approach offers a powerful mathematical framework for solving control synthesis problems (Ji et al., 2025). By formulating control objectives and constraints as LMIs, this approach enables the design of robust and optimal control strategies for complex dynamical systems.
Although the authors previously explored the integration of linear matrix inequalities with the Buckingham Π theorem for generic uncertain oscillating systems (Zand et al., 2024), the present study introduces several substantial new developments that clearly distinguish it from the earlier work. First, the proposed framework is extended from low-order mechanical benchmark systems to a realistic large-scale twenty-story high-rise building equipped with an Active Mass Damper (AMD), involving significantly higher-order coupled structural dynamics. Second, unlike the previous study, which focused primarily on general dynamic disturbances, the current manuscript investigates seismic vibration mitigation under both stochastic excitation and multiple real earthquake records, including near-fault and far-field events. Third, the dimensionless GLMI-based synthesis is reformulated specifically for civil infrastructure applications, where uncertainties in floor mass, damping, and structural stiffness play a critical role. Fourth, a comprehensive comparative assessment is conducted against open-loop, passive, and conventional linear quadratic regulator (LQR) control strategies using multiple structural performance indices and control-effort measures. Therefore, the present paper goes beyond the previously published theoretical concept and provides a new practical, scalable, and earthquake-oriented robust control framework for benchmark building structures. This research introduces a novel dimensionless robust control framework that synergistically combines the Buckingham Π theorem with a generalized linear matrix inequality (GLMI)-based synthesis methodology for effective vibration mitigation in benchmark building structures. By employing Buckingham Π analysis, a dimensionless state-space representation of structural dynamics is derived, providing a rigorous foundation for the formulation of a robust control problem that guarantees system stability under both parametric and structural uncertainties. The proposed approach is systematically validated on a high-rise benchmark building structure subjected to near-fault and far-field seismic excitations, capturing a wide spectrum of dynamic behaviors. Furthermore, the performance of the developed control strategy is thoroughly assessed against open-loop configurations, passive control systems, and conventional LQR controllers. The results highlight the superior effectiveness, adaptability, and robustness of the dimensionless GLMI-based framework, demonstrating its potential as a practical and innovative solution for enhancing the seismic resilience of building structures.
The remainder of this paper is organized as follows. Section 2 presents the theoretical background and the proposed methodology, detailing the integration of dimensional analysis with the generalized linear matrix inequality (GLMI)-based control synthesis. Section 3 describes the numerical modeling and simulation setup developed for the benchmark high-rise structural system. Section 4 demonstrates the implementation and performance assessment of the proposed dimensionless robust control approach through comprehensive numerical analyses and comparative evaluations. Finally, Section 5 provides the overall conclusions, practical insights, and future research perspectives derived from this research.
2. The theoretical background and proposed methodology
In this section, we present a systematic methodology for designing robust controllers for benchmark structural systems subjected to seismic excitations. The proposed approach combines dimensional analysis with generalized linear matrix inequalities (GLMIs) to handle parameter uncertainties efficiently. The methodology is structured to provide both a conceptual understanding for engineers and sufficient technical rigor for researchers.
2.1. Dimensional analysis framework
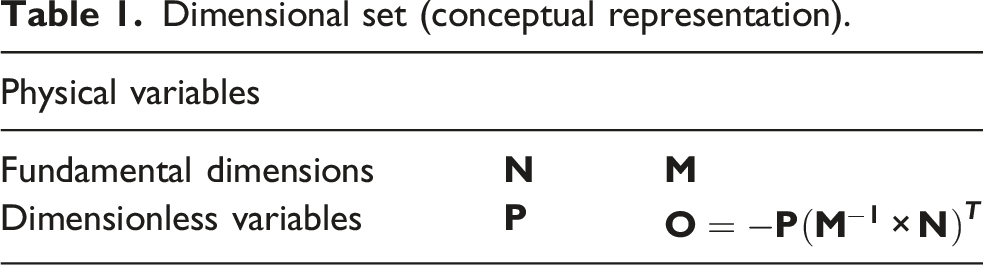
The first step in our approach is to identify dimensionless groups that capture the essential dynamics of the system. This is achieved using the Buckingham Π theorem. • I. II.
It should be noted that the specific partitioning of variables may vary; however, the essential requirement is that the •
Dimensional set (conceptual representation).
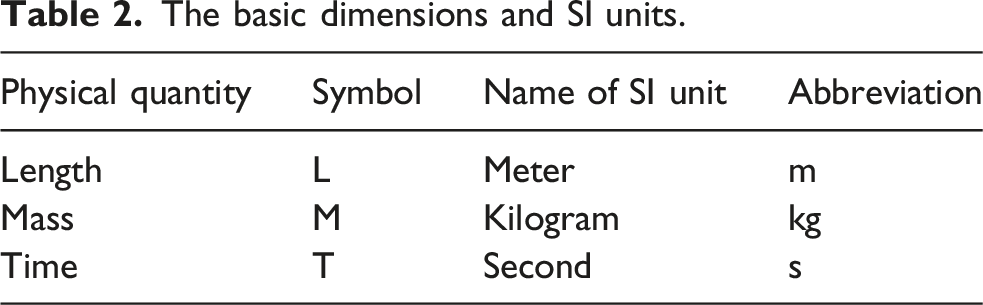
The basic dimensions and SI units.
This framework reduces the complexity of system behavior into manageable dimensionless groups, which serve as the foundation for controller design.
2.2. State-space representation in dimensionless form
The equations that govern the dynamics of systems with 
In equation (1), a full-state feedback configuration is assumed for controller synthesis. Accordingly, the measured output is selected as the complete state vector, i.e., (
All uncertain parameters in the state-space matrices are considered in the form of Structure bounded uncertainty (Mao et al., 1998), as follows. In (3), In (4), p is optional, and In (5), To obtain the dimensionless form of the state-space representation, we construct the following dimensionless group.

















2.3. Robust control via linear matrix inequalities (LMIs)
The robust control problem is formulated to achieve: • Closed-loop asymptotic stability. • Minimization of the energy ratio between outputs and external disturbances, expressed as an

In (20),
Consider real matrices 
(Schur Complement): with constant matrices if only if

(Congruent Transformation):
A closed-loop system In (25), 

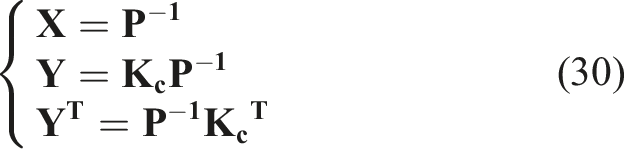
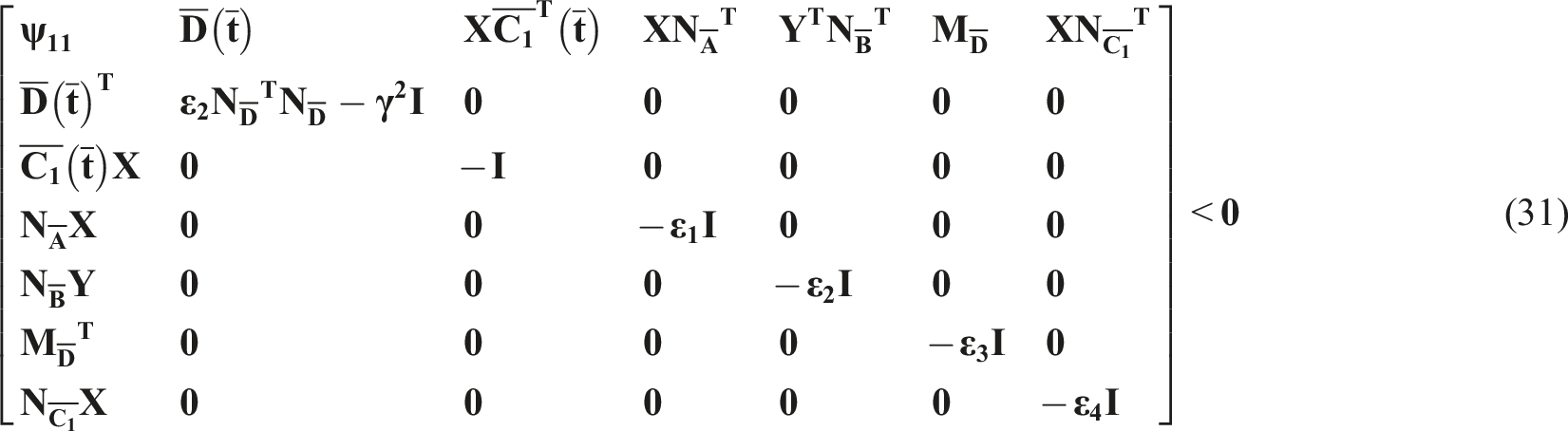
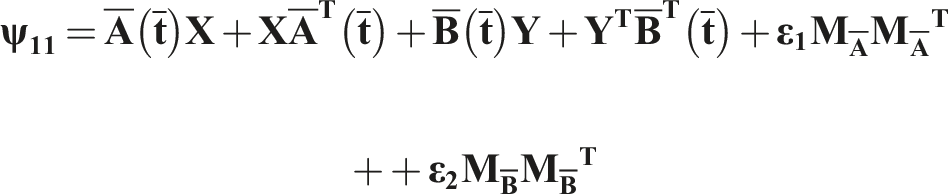
Considering the closed-loop system From equation (26), it can be concluded that if the closed-loop system is dissipative, in a special case, it can be inferred that it will also be We have used the direct Lyapunov method to analyze the stability of the closed-loop system and transformed it into an LMI problem. To do this, we define the quadratic Lyapunov function as follows. The closed-loop system, considering the Lyapunov function defined above, must be internally stable in the absence of external disturbances, i.e., the following conditions must hold. In (29), Based on equation (30), the The resulting controller guarantees stability and attenuates the effect of external disturbances through the enforcement of dissipation inequalities. All uncertain parameters in the system are incorporated into the LMI formulation, ensuring that the derived controller maintains robust performance under a wide range of parametric variations. The overall methodology can be summarized in four sequential steps. First, dimensionless groups are extracted from the system using dimensional analysis, reducing the complexity of the structural dynamics into a manageable set of non-dimensional parameters. Second, the state-space equations are transformed into dimensionless form, enabling a unified treatment of systems with varying physical properties. Third, the robust control problem is formulated and solved through LMIs to determine the controller gain 




3. Numerical modeling and simulation setup
This section develops the dimensionless state-space formulation for the twenty-story high-rise benchmark building structure (Ohtori et al., 2004). Deriving the dimensionless state-space equations plays a critical role in the robust control design based on Linear Matrix Inequalities (LMIs). The dimensionless representation provides a unified mathematical framework that isolates the influence of physical units, simplifies the control design process, and enhances the robustness of controllers against variations in mass, stiffness, damping, and external disturbances. This formulation enables the design of control laws that can be generalized and effectively applied to dimensionally similar structures.
3.1. The twenty-story benchmark building
The twenty-story high-rise benchmark structure (Figure 1) serves as a representative model for tall buildings and is adopted from the ASCE Committee on Structural Control. The building utilizes a steel moment-resisting frame (SMRF) designed according to the 1994 Uniform Building Code (UBC) for Los Angeles seismic conditions. The twenty-story benchmark steel building structure.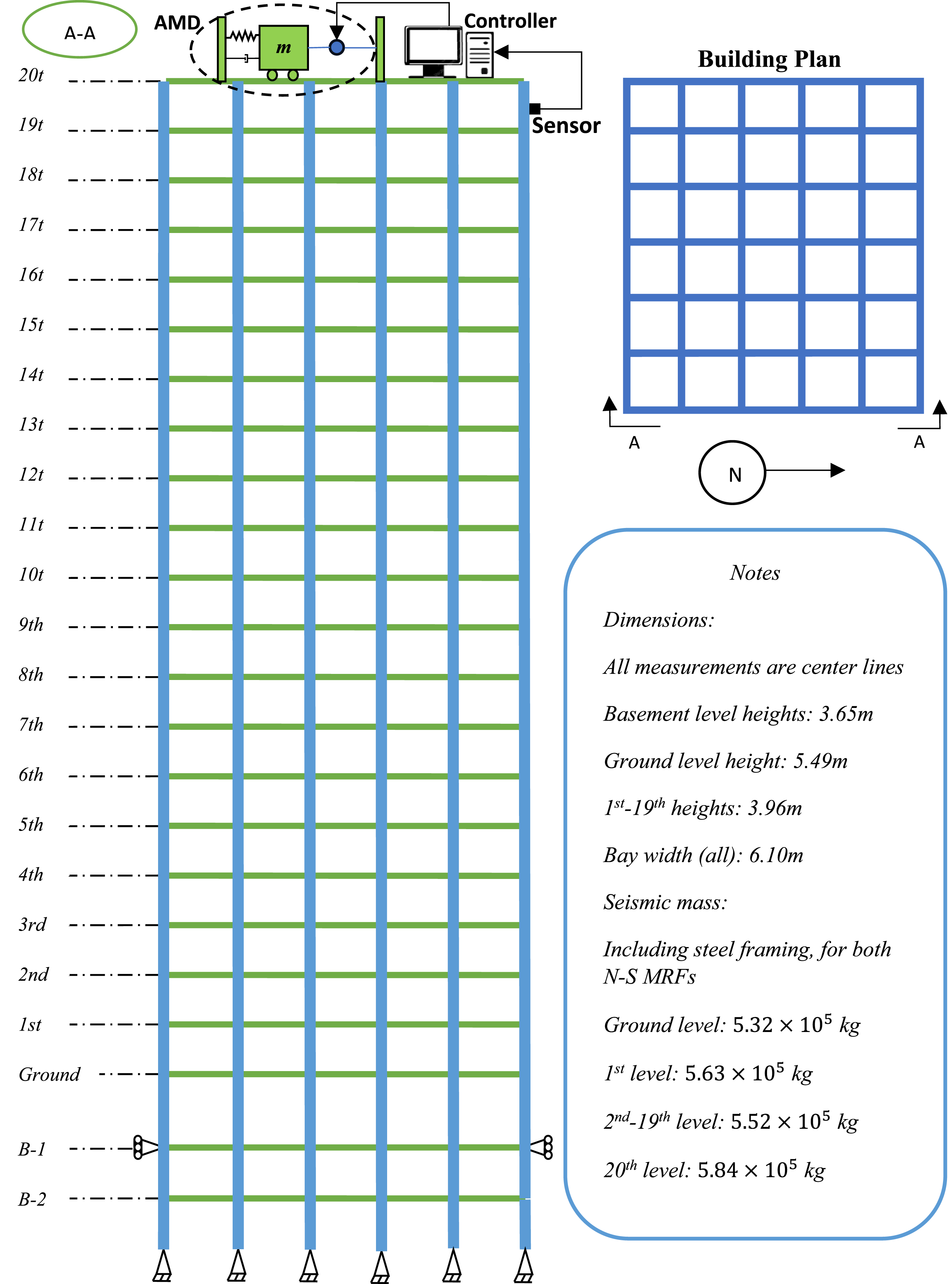
In this configuration, an Active Mass Damper (AMD) is installed on the roof, acting as an actuator with a mass ratio of 2.5% and a damping ratio of 5% of the total structural weight. The AMD provides counteracting control forces proportional to roof acceleration, significantly improving dynamic stability during seismic excitations.
3.2. Dynamic formulation
The motion of an n-story building equipped with an AMD and subjected to ground acceleration d(t) can be expressed as follows:
Equation (32) involves the relative displacement (


In (33),
The two-story building structure dimensional set.
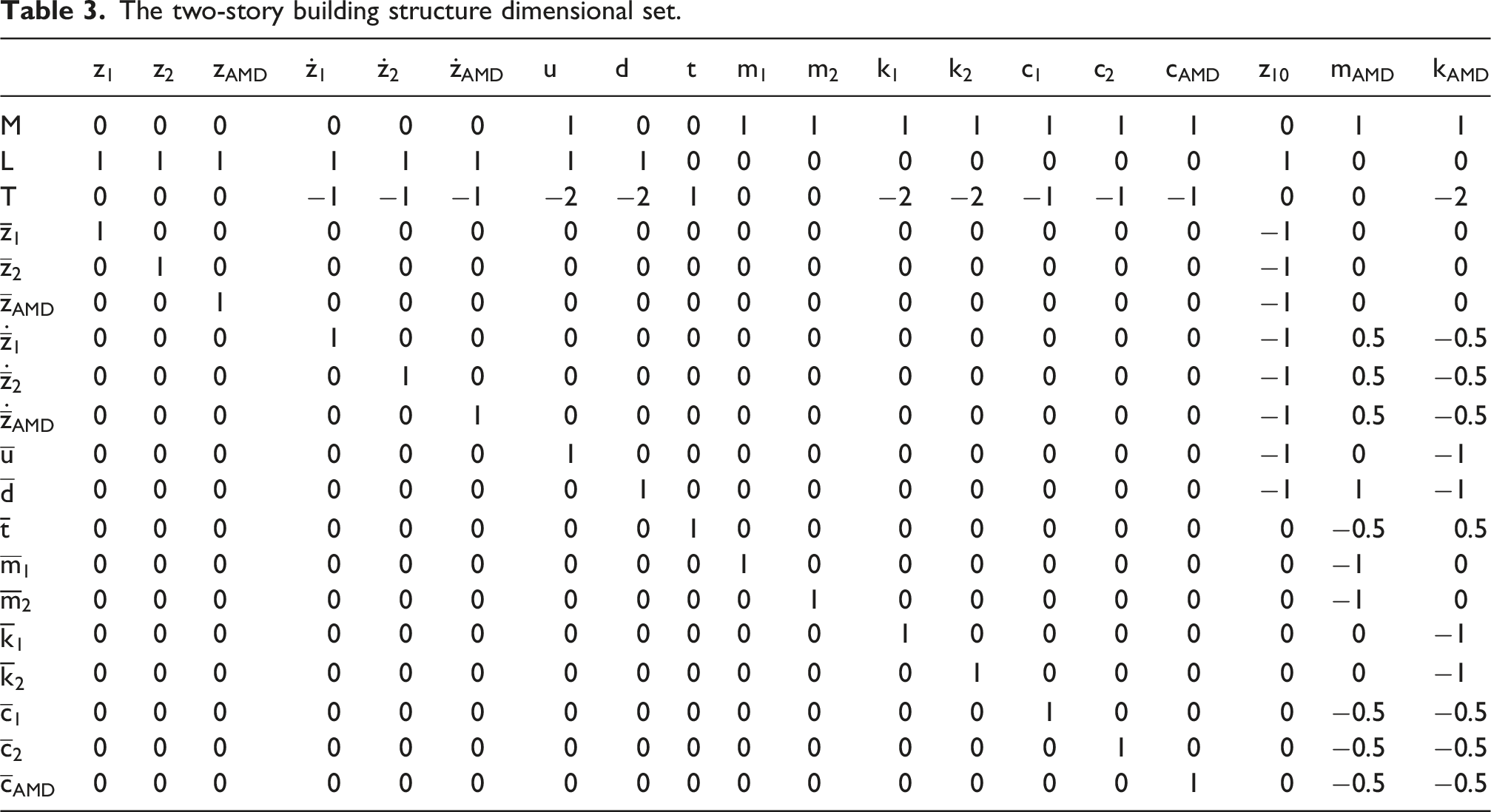
For example, considering the dimensional set outlined in Table 3, the dimension of variable 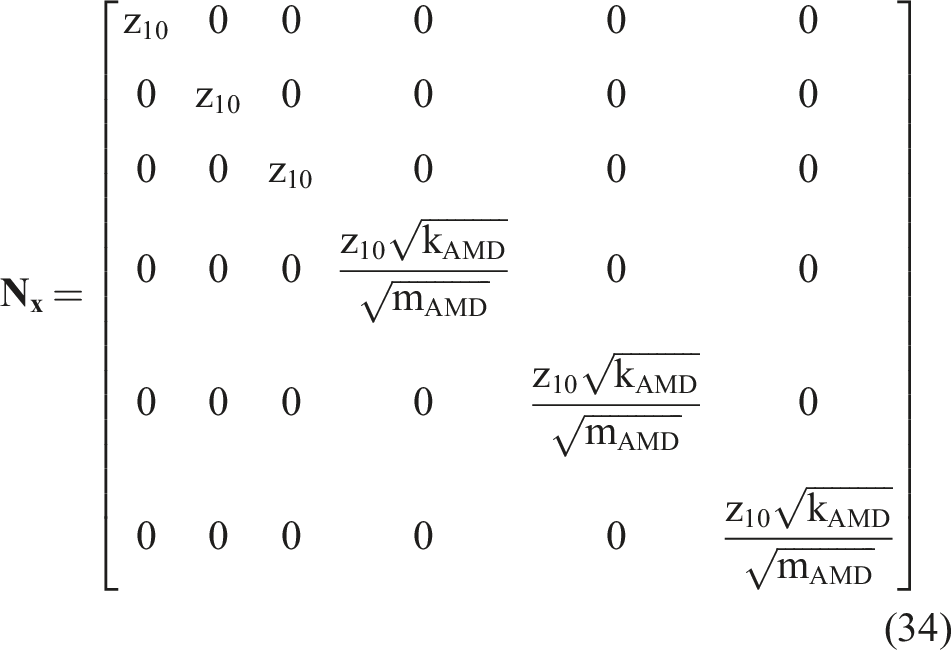




With these dimensionless matrices, the dimensionless state-space matrices can be determined as follows.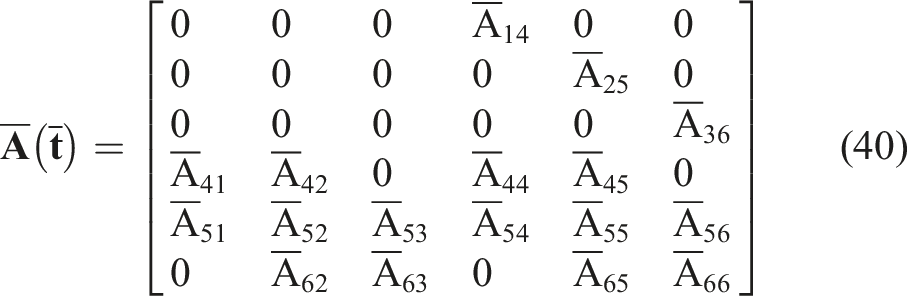
with


The same approach can be easily extended to derive the dimensionless state-space matrices for benchmark structures, such as three-story and twenty-story structural systems.
4. Implementation of dimensionless robust control approach for benchmark structural system
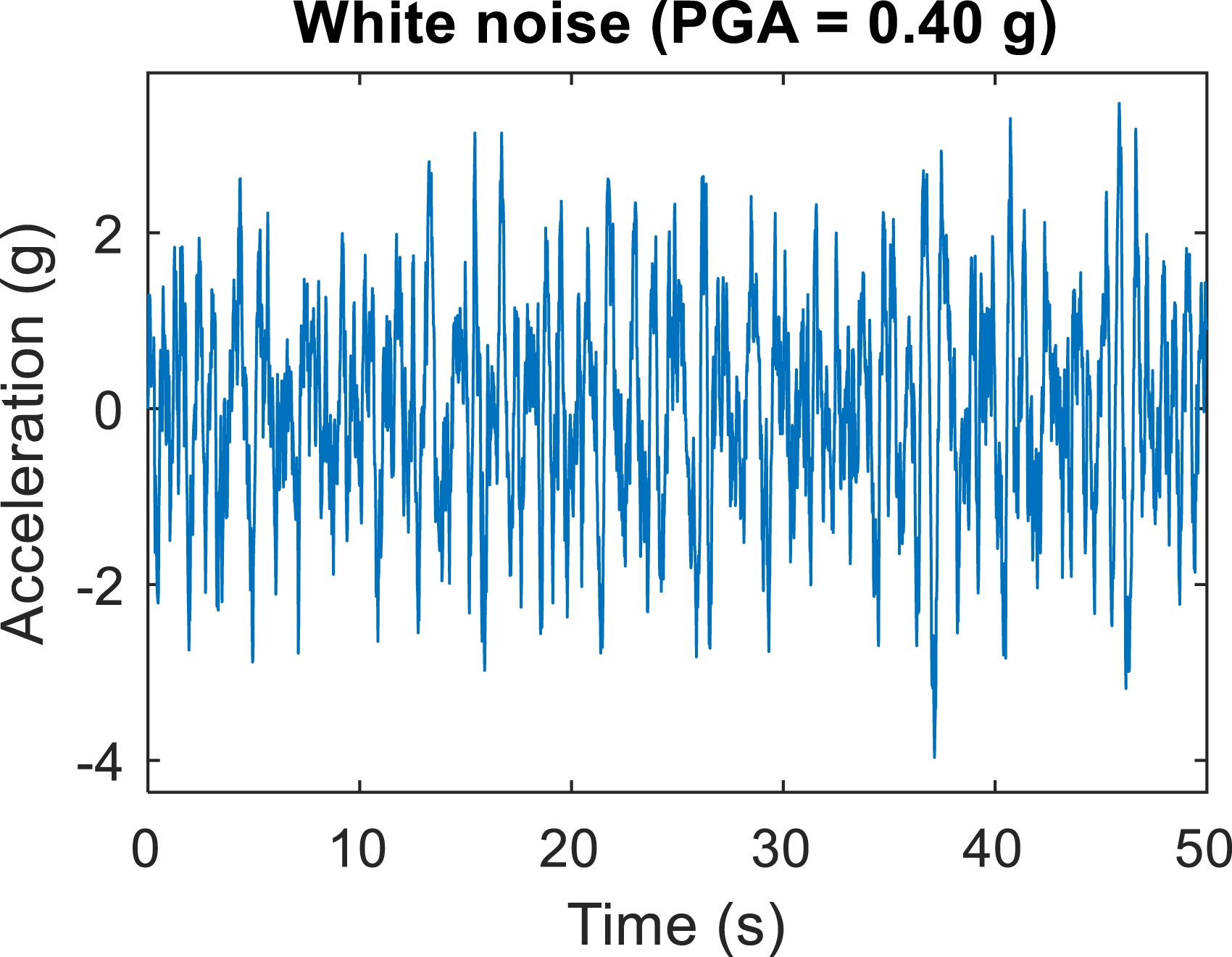
This section aims to address the challenges of uncertainties, disturbances, and parameter variations in the structural systems by utilizing Linear Matrix Inequality (LMI) techniques for controller synthesis. In the building structures, the challenge involves mitigating vibrations induced by external excitations while maintaining structural integrity and stability. The dimensionless robust control approach can help in designing controllers that can effectively dampen vibrations and ensure the safety of the building under dynamic loading conditions. To assess the effectiveness of the dimensionless robust controller, the proposed model is applied to a high-rise building structure equipped with an active mass damper (AMD), which is modeled as a linear shear frame. The external excitation is modeled as a stationary random process, specifically white noise across a broad frequency spectrum, filtered according to the Kanai-Tajimi spectral density (Abrass and Lavan, 2025), as described in equation (45). Time history plot of the white noise disturbance.
For clarity, the numerical protocol adopted in this study consists of two distinct stages: controller synthesis and independent validation. In the synthesis stage, the proposed GLMI-based robust controller was designed using a stochastic broadband excitation generated from white noise filtered through the Kanai–Tajimi spectrum, representing uncertain seismic frequency content in a probabilistic manner. After obtaining the controller gain, a separate validation stage was conducted using four recorded earthquake motions, including two near-field and two far-field events. These historical records were not used during the controller design stage and were employed solely to assess the robustness and practical effectiveness of the proposed strategy under realistic seismic demands with varying amplitudes, frequency contents, and source characteristics.
Selected earthquake records and their respective characteristics.

In Table 4, Mw, R, PGA, and DF refer to moment magnitude, distance to the active fault, peak ground acceleration, and dominant frequency content, respectively. Figures 3–5 illustrate the frequency content and response spectra for the Elcentro and Kobe earthquake excitations, including the mean spectra for 5% damping. The frequency content of the earthquake records: (a) Elcentro, and (b) Kobe. The response spectra of the far-field selected earthquake records: (a) displacement, and (b) acceleration. The response spectra of the near-field selected earthquake records: (a) displacement, and (b) acceleration.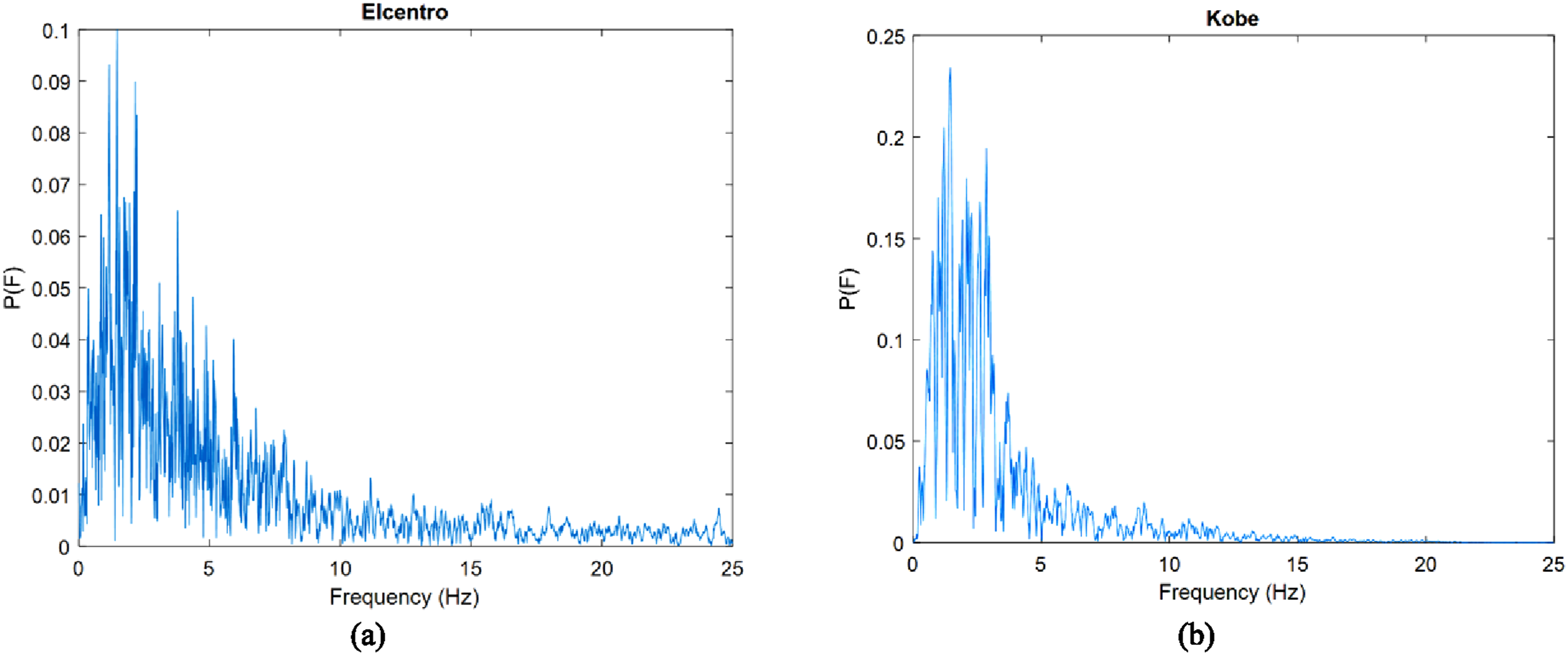
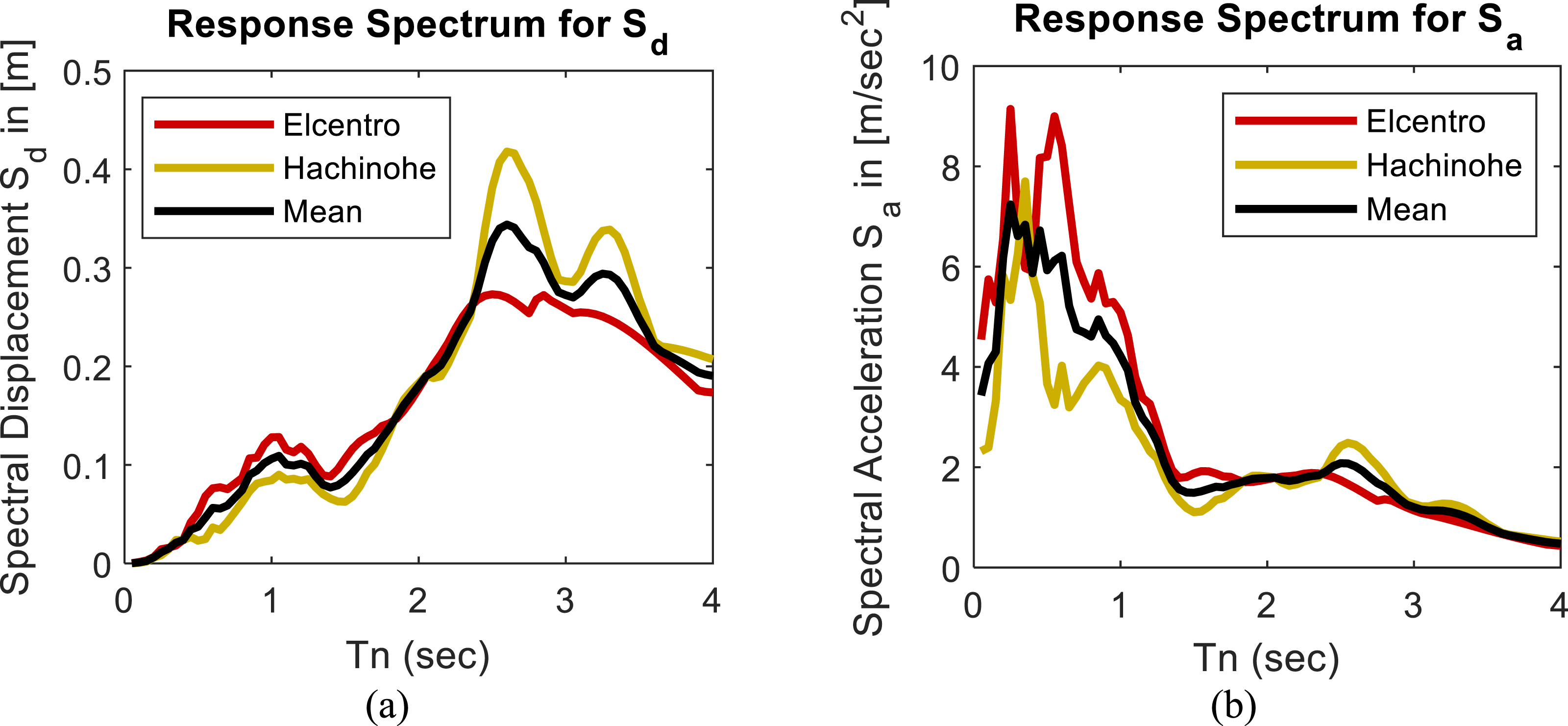
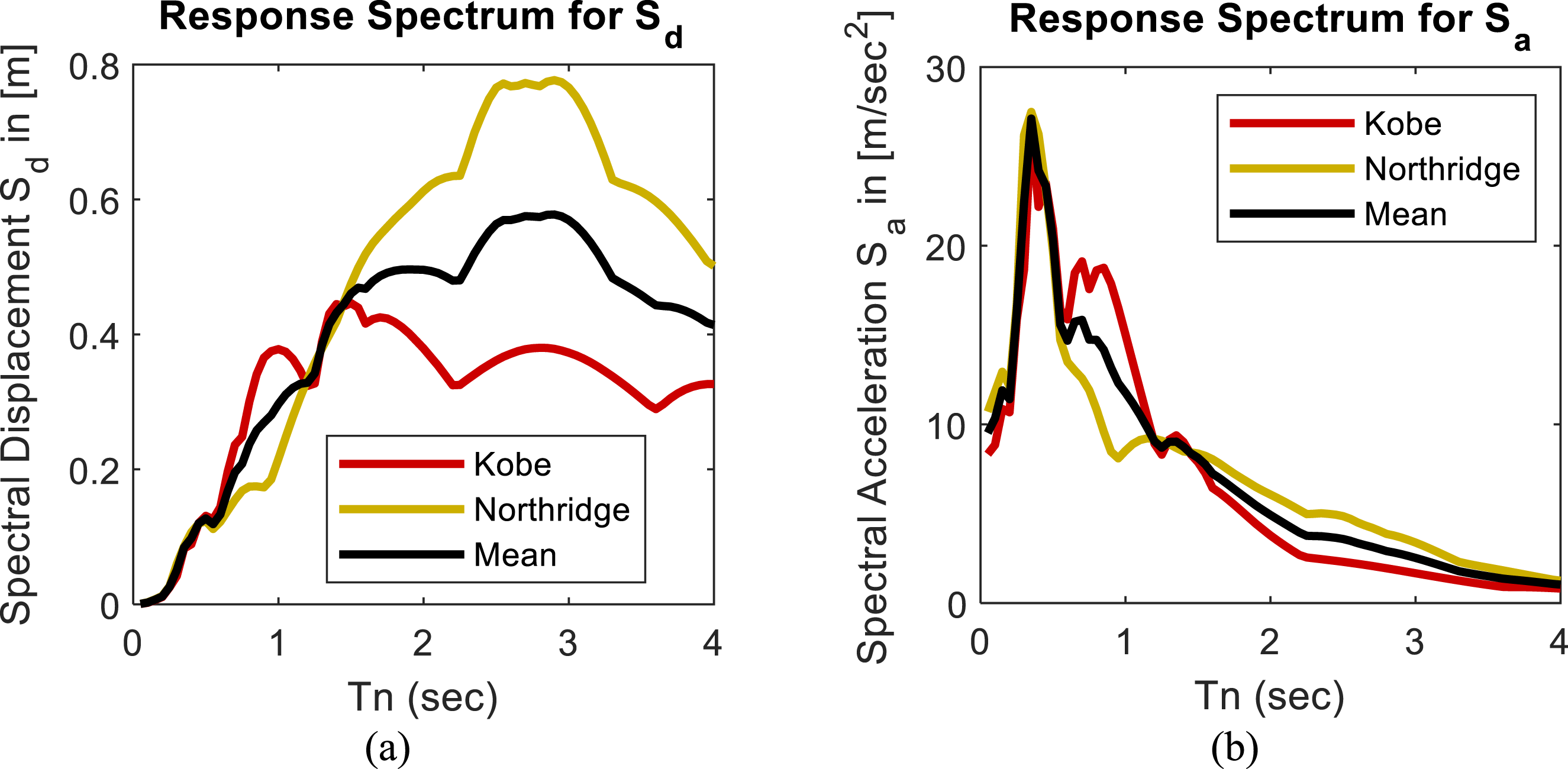
These figures provide a comprehensive overview of the seismic excitations considered in this study, highlighting both the dominant frequency ranges and the variability between far- and near-field earthquake excitations. The selected response spectra capture the essential characteristics of the ground motions, allowing for an accurate assessment of structural dynamic behavior under realistic seismic records. By including the mean spectra for 5% damping, the analysis ensures consistency in comparing the response of different building models, while also accounting for typical energy dissipation observed in structural systems.
4.1. Twenty-story high-rise robust vibration control
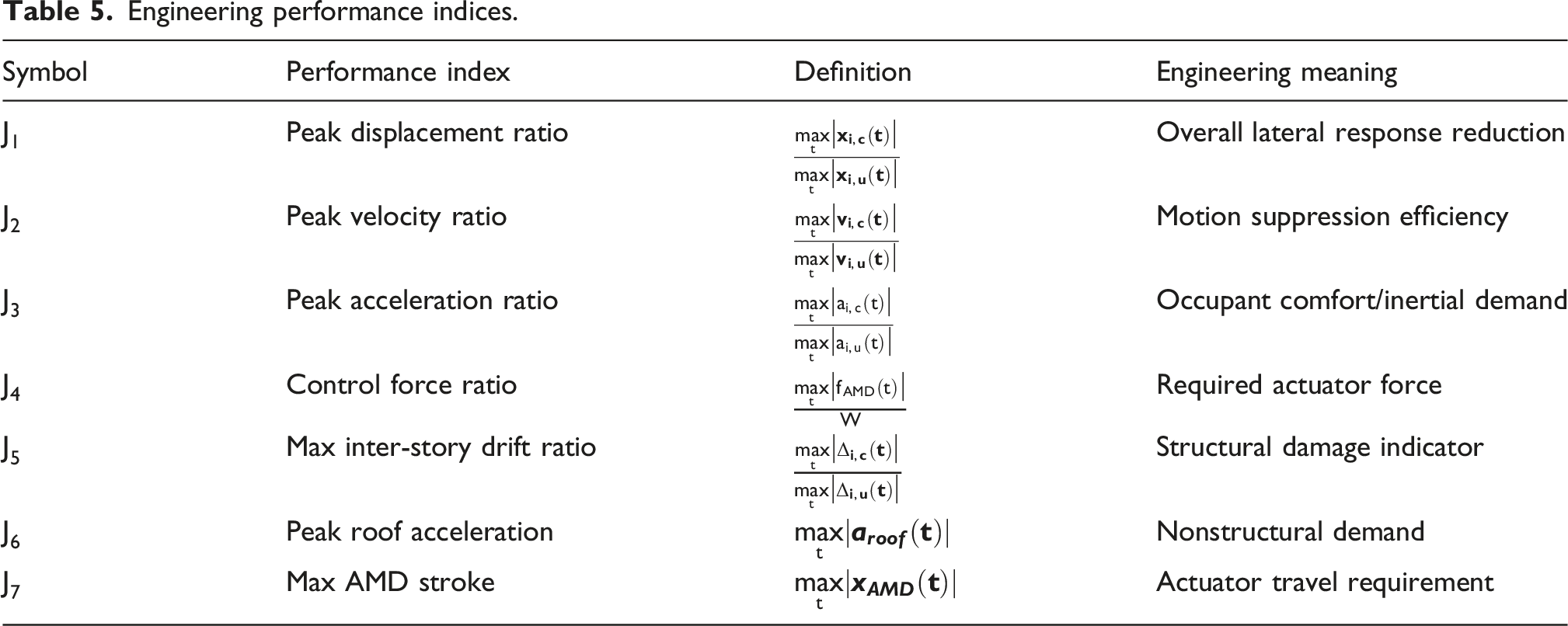
Engineering performance indices.
In order to select the optimal value of the Performance indices variations: (a) 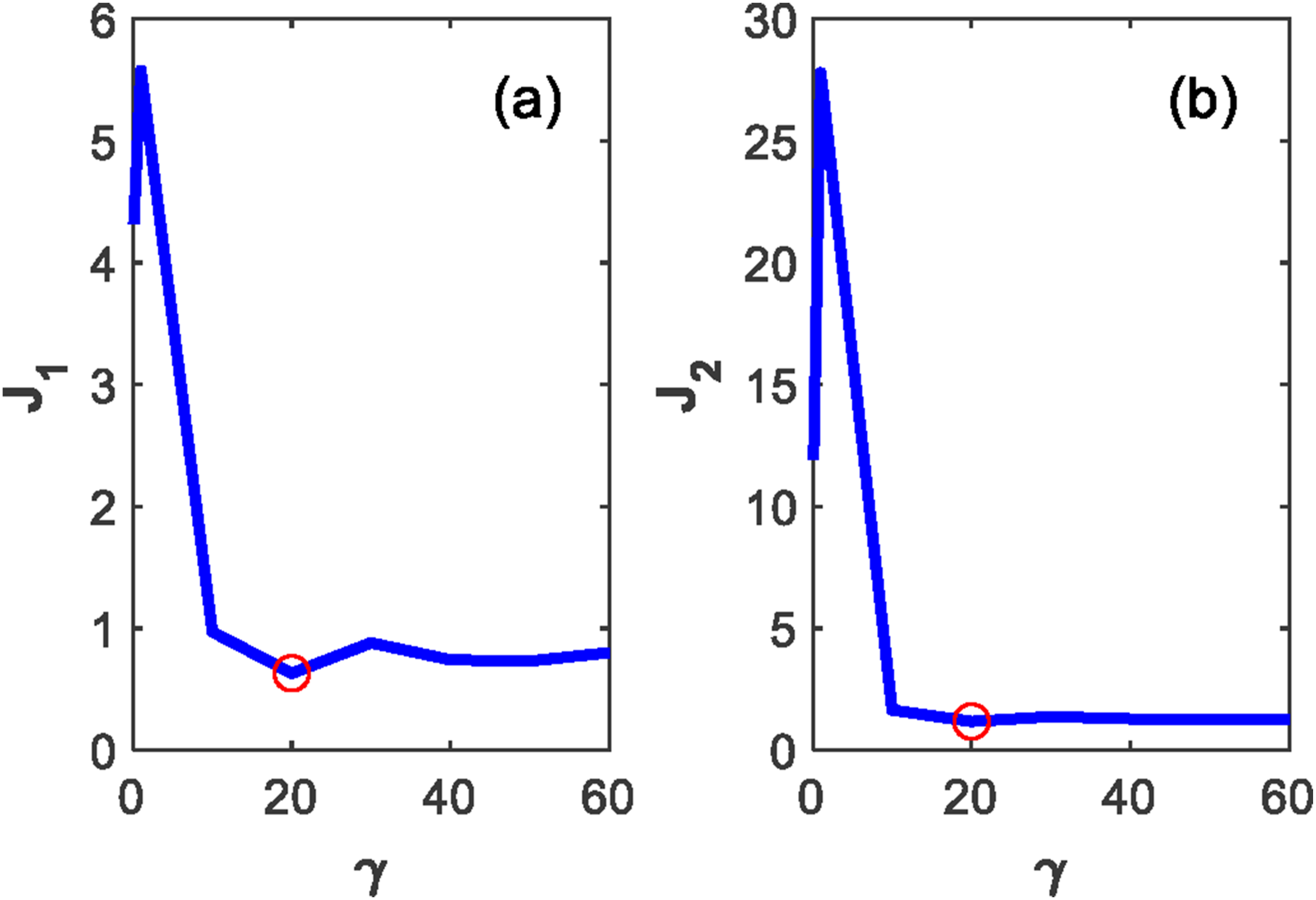
Based on Figure 6, by selecting the optimal value of 
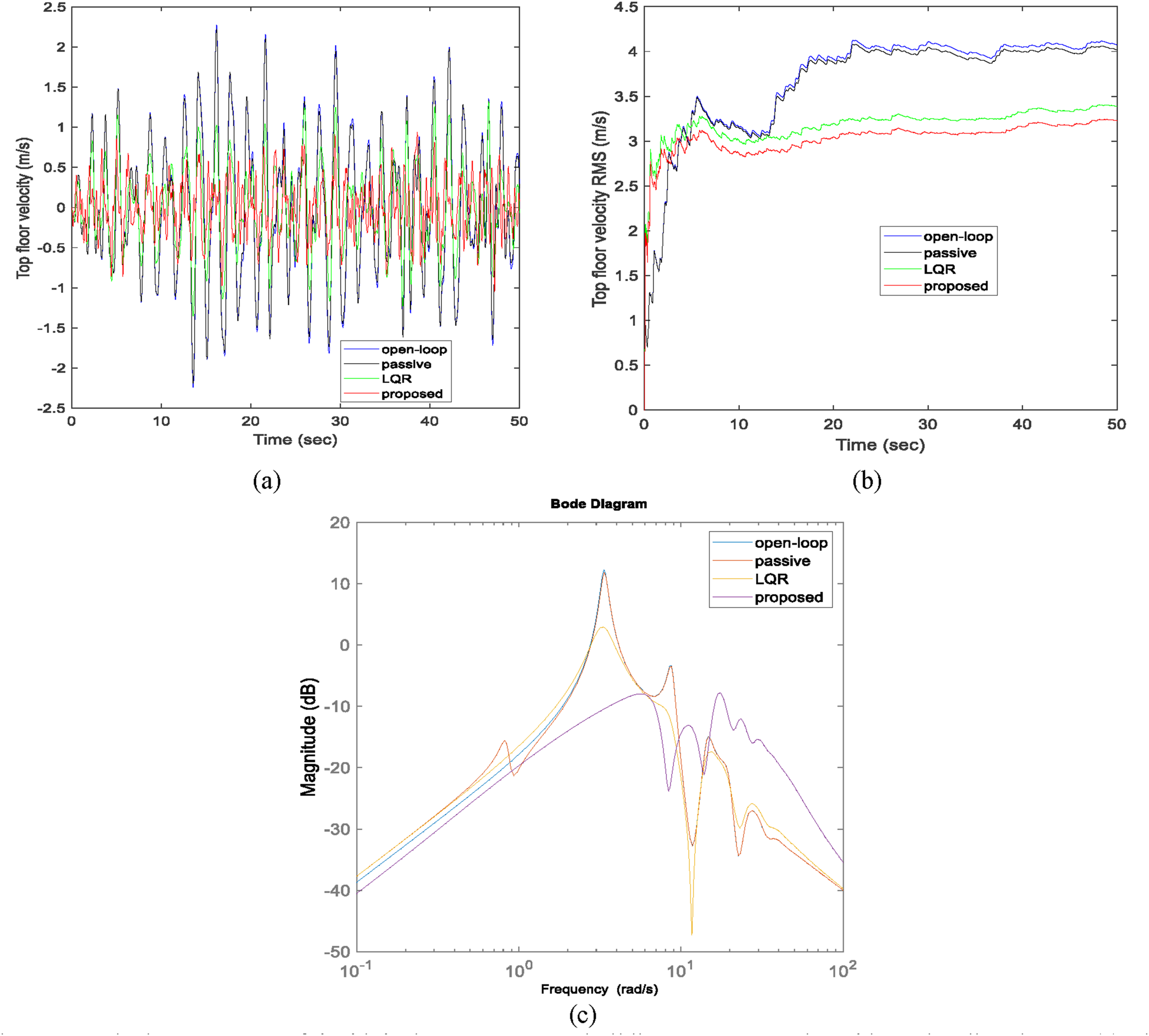
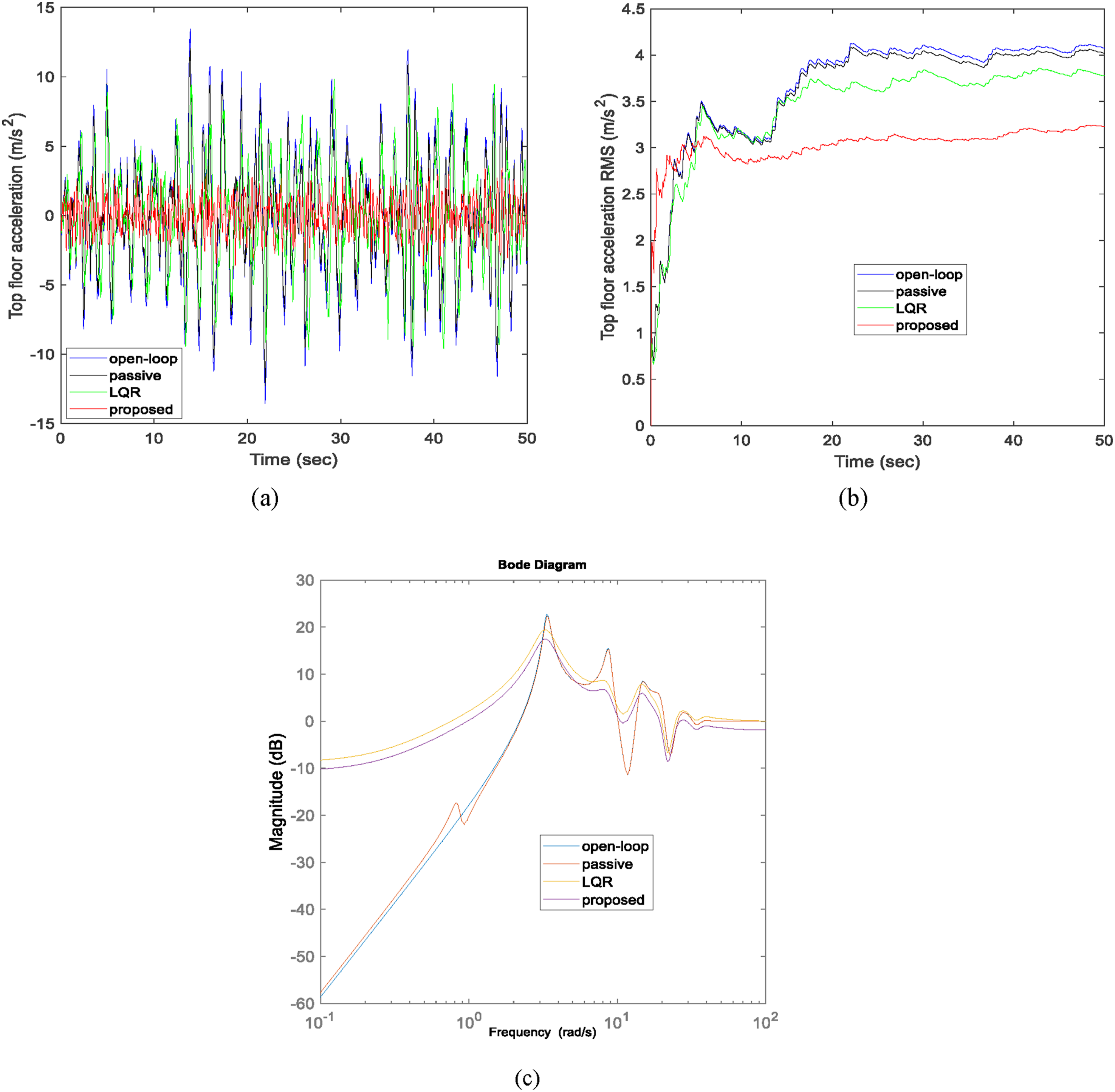
With this robust control gain, the closed-loop system in (1), will be Displacement responses of the high-rise twenty-story building structure under white noise disturbance: (a) Time history (b) RMS and (c) Frequency responses. Velocity responses of the high-rise twenty-story building structure under white noise disturbance: (a) Time history (b) RMS and (c) Frequency responses. Acceleration responses of the high-rise twenty-story building structure under white noise disturbance: (a) Time history (b) RMS and (c) Frequency responses.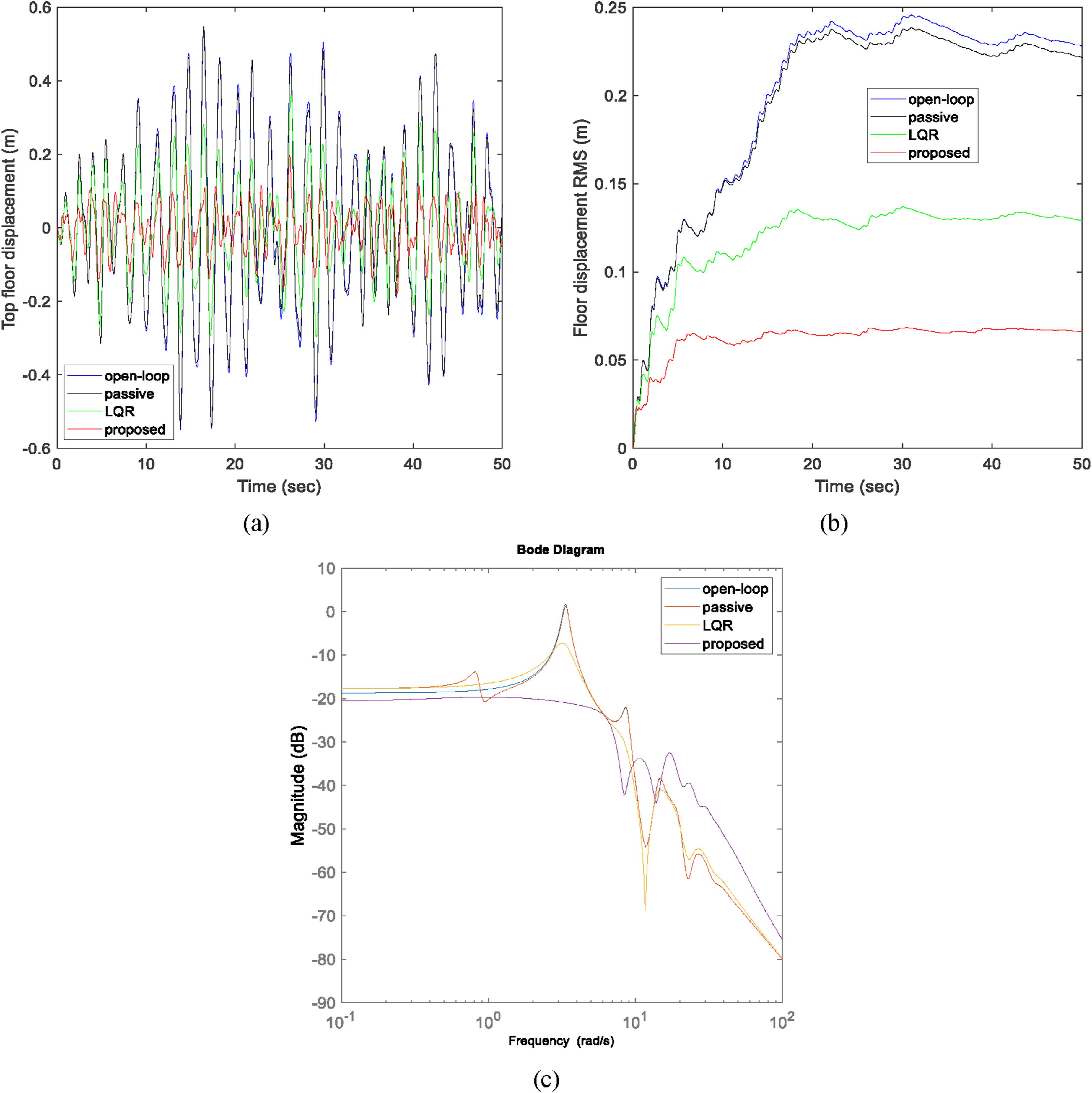
For the LQR benchmark controller, the weighting matrices were selected based on a standard quadratic performance trade-off between state regulation and control effort. The state-weighting matrix was chosen as
To assess the control requirement, Figure 10, illustrates the control effort needed for two control scenarios: LQR and the Proposed robust control. The active control effort requirements subjected to white noise disturbance. (a) LQR and (b) Proposed robust control.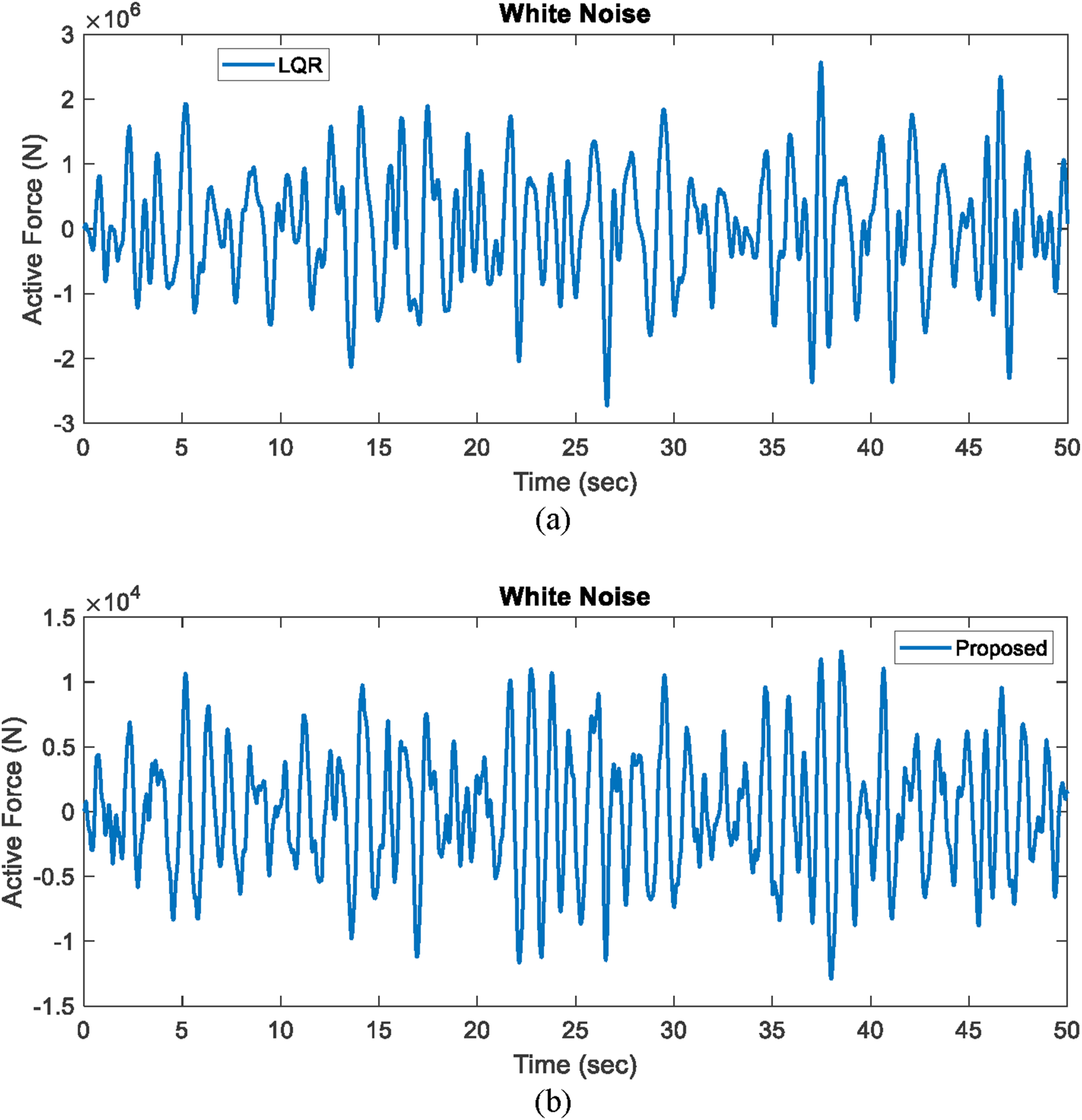
Mean ± standard deviation of expanded performance indices under near-field and far-field earthquakes considering structural uncertainty.
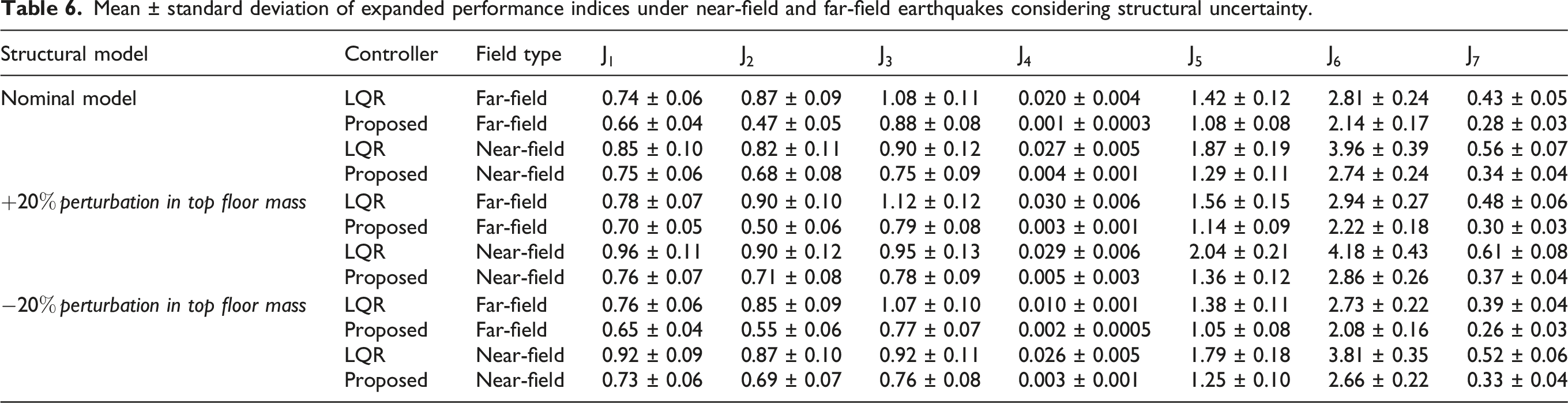
Based on the average values of the engineering performance indices presented in Table 6, the proposed dimensionless robust controller consistently demonstrates superior performance compared with the conventional LQR strategy for the nominal model as well as for the ±20% perturbed top-floor mass cases under both far-field and near-field earthquake excitations.
For the nominal model under far-field earthquakes, the proposed controller reduces the peak displacement ratio (
For the nominal model under near-field earthquakes, the proposed strategy lowers
The additional engineering indices further confirm the practical advantages of the proposed methodology. Under the nominal far-field case, the maximum inter-story drift ratio (
The robustness of the proposed controller is also evident under parameter uncertainty. For the +20% top-floor mass perturbation, under far-field excitation,
Likewise, for the −20% top-floor mass perturbation, the proposed controller maintains better performance in all indices. For example, under near-field motions, the peak displacement ratio decreases from 0.92 to 0.74, peak velocity ratio from 0.87 to 0.69, peak acceleration ratio from 0.92 to 0.76, and control effort from 0.026 to 0.003.
In addition to the improved mean values, the standard deviation results in Table 6 further verify the robustness and consistency of the proposed control strategy. Across nearly all response indices, the proposed controller exhibits smaller standard deviations than the LQR benchmark, indicating lower sensitivity to record-to-record variability and more stable performance under different earthquake characteristics. For the nominal far-field case, the standard deviation of
A similar trend is observed for the uncertainty cases. Under the +20% mass perturbation and near-field motions, the standard deviation of
These lower dispersion levels are particularly significant from an engineering standpoint, since they imply that the proposed GLMI-based controller delivers not only better average performance but also more predictable and dependable behavior across a range of seismic inputs. This consistency is highly desirable in practical structural control applications, where earthquake excitation characteristics cannot be known in advance.
Overall, considering all structural models and excitation types, the proposed dimensionless robust controller provides lower structural responses, reduced drift demand, smaller floor accelerations, lower actuator stroke requirements, and significantly less actuator demand than the LQR benchmark, while simultaneously exhibiting smaller statistical variability. These results verify that the GLMI-based dimensionless control framework offers both theoretical robustness and strong practical effectiveness for seismic vibration mitigation of uncertain high-rise building systems.
Despite the encouraging results obtained in this study, several limitations should be acknowledged. First, the numerical validation has been conducted using a single twenty-story benchmark building model, and therefore the reported findings should be interpreted within the context of this representative structural configuration. Second, the structural system has been modeled using a linear shear-frame idealization; consequently, potential nonlinear behaviors such as material yielding, geometric nonlinearity, joint degradation, and pounding effects have not been explicitly considered. Third, the controller formulation assumes the availability of full-state feedback information, whereas practical implementation may require state-estimation techniques and sensor constraints. Finally, the present validation is numerical in nature, and experimental verification through shake-table or full-scale testing would be necessary to fully confirm practical applicability. Future studies may extend the proposed framework to nonlinear multi-hazard systems, soil–structure interaction effects, and large-scale experimental implementations.
5. Conclusions
This research presented a unified framework that integrates dimensional analysis with generalized linear matrix inequality (GLMI)-based robust control synthesis to enhance the stability and performance of structural systems under dynamic excitations. By combining the Buckingham Π theorem with modern LMI theory, a dimensionless robust controller was formulated to ensure consistent behavior across the considered high-rise benchmark structure, irrespective of its physical scales or material properties.
The presented approach effectively addressed the challenges of parametric uncertainty and external disturbances by transforming the system into a dimensionless state-space representation. This formulation provided a clear physical interpretation while simplifying the controller design process.
Numerical simulations conducted on a twenty-story linear benchmark shear-frame structure demonstrated that the proposed dimensionless robust controller significantly reduced displacement and acceleration responses compared to open-loop, passive, and classical LQR controllers. The results revealed improved damping characteristics, faster response recovery, and enhanced stability margins in both time and frequency domains. It is emphasized that these observations are obtained within the context of a single representative benchmark model, and therefore should be interpreted accordingly.
A key advantage of the proposed methodology lies in its conceptual scalability. Since the controller is formulated based on dimensionless parameters, it provides a unified representation that can facilitate extension to other dynamically similar structural systems. However, it should be noted that the present study is limited to a single twenty-story linear shear-frame benchmark, and therefore broader applicability across different structural configurations and nonlinear systems requires further investigation and validation.
From a broader perspective, the findings of this research provide a conceptual bridge between theoretical control synthesis and practical implementation in structural engineering. The approach not only establishes a mathematically rigorous framework but also ensures interpretability for engineers and researchers unfamiliar with advanced control mathematics.
This study opens several promising avenues for future research. The control synthesis can be further extended to nonlinear and hybrid systems, while experimental validation on shake-table or full-scale structures would confirm its practical effectiveness under real seismic conditions. Integration with adaptive and learning-based algorithms may also enhance real-time robustness against evolving uncertainties. Extension to time-delay and distributed-parameter systems would further improve the versatility of the proposed framework.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.