
Abstract
Vibration transmission in rotating machinery is typically interpreted through localized spectral responses associated with component-level faults. In mechanically coupled assemblies, however, defect-induced excitation propagates through interconnected structural paths, potentially producing asymmetric dynamic interactions between components. The directional characteristics and frequency evolution of such interactions remain insufficiently quantified. This study experimentally investigates the frequency-dependent attenuation of directional transmission asymmetry in a coupled rotating drivetrain under controlled fault conditions. A reciprocal transmission framework is formulated using defect-induced amplitude increments measured at paired components. Directional transmission coefficients are defined, and an asymmetry ratio is introduced to quantify the imbalance between forward and reverse excitation propagation. Experiments conducted over the 10–50 Hz excitation range across four mechanically distinct bidirectional transmission paths reveal a consistent monotonic reduction of the asymmetry ratio with increasing frequency. In all cases, the evolution is accurately described by an exponential attenuation model of the form Rij(ω) = 1+Cijexp(−kω). While the initial asymmetry magnitudes Cij depend on local interface characteristics and excitation mechanisms, the identified convergence coefficients k remain confined to a narrow interval across all transmission paths. This limited dispersion indicates that the attenuation rate of directional dominance is governed predominantly by the global dynamic structure of the coupled assembly rather than by localized contact effects. The results reveal a systematic transition from directionally biased transmission in the low-frequency regime to progressively balanced dynamic interaction at higher frequencies. The proposed formulation provides a compact and experimentally supported representation of frequency-controlled directional attenuation and offers a system-level interpretation of vibration propagation in coupled rotating systems.
Keywords
1. Introduction
Rotating machinery such as geared transmissions, motor–shaft assemblies, and bearing-supported drivetrains operates as a dynamically coupled system in which mechanical excitation rarely remains confined to its point of origin. Instead, disturbances generated by localized defects propagate through interconnected structural interfaces governed by stiffness distribution, compliance, boundary conditions, and transmission path characteristics. Understanding how vibrational energy is redistributed across mechanically linked components is therefore essential not only for reliable fault detection, but also for explaining the dynamic behavior of the assembly as an integrated mechanical system. Within this broader context, an important unresolved issue concerns the reciprocity of excitation transmission between coupled components, namely, whether vibration transfer between mechanically connected nodes is intrinsically symmetric or whether directional asymmetry persists as excitation frequency varies.
Vibration-based condition monitoring has long treated measured vibration as a primary indicator of defect initiation and progression in rotating elements (Engur, 2007; Randall, 2011). Over time, this line of research has produced a wide range of spectral, time-domain, and time–frequency approaches for identifying fault-related signatures in bearings, gears, shafts, and other rotating components (Malla and Panigrahi, 2019; Tiboni et al., 2022). More recent studies have extended this diagnostic perspective through intelligent monitoring strategies, deep learning-based classification frameworks, and robust denoising procedures designed to improve fault detectability under noisy and non-stationary operating conditions (Bagri et al., 2024; Chen et al., 2022; Matania et al., 2024; Wang et al., 2021; Zhou et al., 2023). Advanced signal-processing techniques have also been applied to transient vibration responses for detecting structural defects such as rotor cracks (Babu et al., 2008), while recent sensor developments have expanded measurable bandwidth and sensitivity for intelligent machinery monitoring (Huang et al., 2022). Despite these advances, most condition-monitoring frameworks still interpret vibration primarily as a local response measured at isolated points, rather than as the outcome of bidirectional excitation transfer within a mechanically coupled structure.
This limitation becomes more apparent when viewed against the broader literature on gear and rotor dynamics. Early analytical studies showed that the dynamic behavior of transmission assemblies depends strongly on coupled structural interactions rather than on isolated component properties alone. The natural modes of planetary gear trains were shown to be highly sensitive to mesh stiffness and shaft flexibility (Kahraman, 1994), while mathematical formulations including shape deviations and mounting errors demonstrated the importance of geometric and structural imperfections in governing dynamic response (Velex and Maatar, 1996). Nonlinear excitation and clearance-type effects were likewise shown to alter steady-state responses in mechanically coupled oscillatory systems (Blankenship and Kahraman, 1994). Experimental and analytical work on rotor–bearing systems with misaligned gear couplings further confirmed that lateral–torsional interaction modifies global vibration behavior rather than remaining confined to local elements (Li and Yu, 2000; Munro and Palmer, 1995).
Parallel developments in rotordynamics and structural modeling reinforced the same system-level interpretation. Classical rotordynamic formulations established that the interaction between shafts, bearings, and support structures significantly affects modal characteristics and vibration propagation throughout the rotating assembly (Ehrich, 1999; Genta, 2005). More generally, substructure coupling theory showed that the dynamic behavior of a complex mechanical system is fundamentally altered by the interaction of its connected components (Craig and Bampton, 1968). In drivetrain applications, multi-body and reduced-order modeling studies demonstrated that stiffness distribution, bearing clearance, and structural compliance strongly influence modal behavior and transmission characteristics (Guo and Parker, 2012; Helsen et al., 2011). Similar conclusions have emerged from numerical–experimental investigations of electromechanical machines and from data-driven analyses of drivetrain noise behavior in electric-vehicle applications, both of which indicate that vibration response reflects global coupling effects rather than strictly local defect activity (Horváth, 2026; Kapu and Singh, 2022).
Beyond component-level dynamic modeling, a substantial body of work has addressed how vibrational energy is redistributed within coupled structures. Structural power flow and vibrational conductivity formulations have provided theoretical descriptions of frequency-dependent energy transfer across connected subsystems (Langley, 1994; Pinnington and White, 1981). More recent reliability studies under non-stationary random excitation have likewise shown that distributed structural dynamics govern the response evolution of complex rotating units (Li et al., 2024). Experimental investigations in coupled mechanical and electromechanical systems further support this view, showing that measured vibration amplitudes and vibro-acoustic responses depend strongly on source location, transmission path characteristics, and configuration-dependent structural interactions (Wang et al., 2023; Zhang et al., 2019). Comparable observations have also been reported in broader structural systems exposed to multi-source excitation, where modal participation redistributes across interconnected frames and supporting structures (Chen et al., 2020).
In parallel, several studies have developed explicit tools for identifying and quantifying vibration transmission routes. Transfer-path and vibration power-flow methodologies have been used to decompose transmission contributions and evaluate how structural interfaces shape measured responses in coupled systems (Li et al., 2022; Ren et al., 2023; Zhu et al., 2022). Related experimental work on drive systems during automatic transmission has shown that coupled vibration behavior evolves with operating configuration and structural interaction conditions (Su, 2019; Su et al., 2024). Studies of isolation systems and controlled rotor configurations similarly indicate that vibration transmission characteristics change systematically with structural coupling, inertial interaction, and damping distribution (Dong et al., 2022; Fang et al., 2018; Singh & Kumar, 2024; Tian et al., 2025). Collectively, these studies establish that vibration propagation in rotating machinery is governed by a distributed structural architecture in which shafts, gears, bearings, couplings, supports, and interfaces all participate in shaping the observed response.
However, an important gap remains. Although prior studies have examined fault signatures, modal coupling, structural energy redistribution, transfer paths, and configuration-dependent vibration transmission, the reciprocal characteristics of defect-induced excitation transfer between mechanically paired components have not been directly quantified within a compact experimental framework. Existing studies explain how vibration is generated, transmitted, attenuated, or redistributed, yet they do not explicitly determine whether transfer between coupled nodes is dynamically symmetric or whether measurable directional dominance persists under the same structural configuration. This distinction is important because practical drivetrains operate under a preferred torque-flow direction, and low-frequency excitation may therefore propagate preferentially along the principal load path. As frequency increases, distributed compliance, bending deformation, and torsional wave effects progressively modify the global system response (Ehrich, 1999; Genta, 2005). What remains unclear is how this transition manifests experimentally in terms of reciprocal transmission symmetry between structurally linked nodes.
The present study addresses this need by introducing a reciprocal directional transmission framework for quantifying defect-induced vibration propagation in a coupled rotating assembly. An asymmetry ratio is defined to compare forward and reverse excitation transfer between mechanically paired components under a fixed structural configuration. The experimental results reveal a consistent frequency-dependent convergence of directional asymmetry toward reciprocal behavior across structurally distinct transmission paths. The limited dispersion of the identified convergence coefficients further suggests that the attenuation of directional dominance is governed primarily by a global structural property of the drivetrain rather than by a purely local contact phenomenon.
The main contributions of this study are as follows: • Development of a reciprocal transmission formulation for defect-induced vibration propagation in coupled rotating systems. • Experimental identification of a consistent frequency-dependent exponential attenuation behavior across multiple bidirectional transmission paths. • Demonstration that the attenuation rate exhibits limited variability, indicating structural control governed by global dynamic characteristics.
2. Experimental setup and methodology
2.1. Test rig configuration
The experimental study was conducted on a coupled rotating drivetrain consisting of an electric motor, two rolling-element bearings, a flexible coupling, and a two-stage cycloidal gearbox mounted on a rigid base frame. Power was transmitted along a single shaft line, enabling reciprocal vibration transmission analysis between mechanical elements. The drivetrain operated under steady-state rotational conditions within a primary experimental frequency band of 10–50 Hz, with extended validation performed up to 100 Hz. The selected low-frequency range intentionally targets the stiffness-dominated regime of drivetrain dynamics, where directional transmission asymmetry is expected to be most pronounced. At low frequencies, vibration transmission is governed primarily by structural stiffness and impedance mismatch between coupled components, which enhances directional bias. At higher frequencies, increasing modal density and distributed damping progressively homogenize the vibration field, reducing directional effects. Therefore, the 10–50 Hz band provides the most informative window for identifying the fundamental mechanism of directional asymmetry. This range corresponds to the controllable operating window of the experimental drivetrain under stable loading and measurement conditions. The structural configuration remained unchanged throughout all experiments to ensure consistency of global dynamic characteristics. Localized defects were introduced individually under controlled conditions to evaluate directional transmission behavior between component pairs.
No changes were introduced in shaft alignment or sensor direction between component pairs. This ensured that the global dynamic characteristics of the drivetrain remained invariant during the reciprocal transmission analyses.
As shown in Figure 1(a), the experimental drivetrain comprises a motor-driven single shaft line mechanically coupled to a two-stage cycloidal gearbox and a controlled loading assembly, all rigidly mounted on a common base frame to preserve structural invariance throughout the experiments. The drive side is powered by a 220 V electric motor (OEM, IE1 class, Model 1140250) operated via a Variable Frequency Drive (VFD) speed control unit, enabling continuous and stable adjustment of rotational frequency within the 10–100 Hz range under steady-state conditions. Torque is transmitted through a flexible coupling into a two-stage cycloidal gearbox (UHO, AC type, Integral model, 1996), forming the central transmission subsystem. At the tail end, the drivetrain is connected to a conveyor-based loading unit that applies adjustable torque while maintaining stable boundary conditions during testing. Experimental drivetrain: (a) laboratory setup and (b) schematic representation of the coupled transmission system.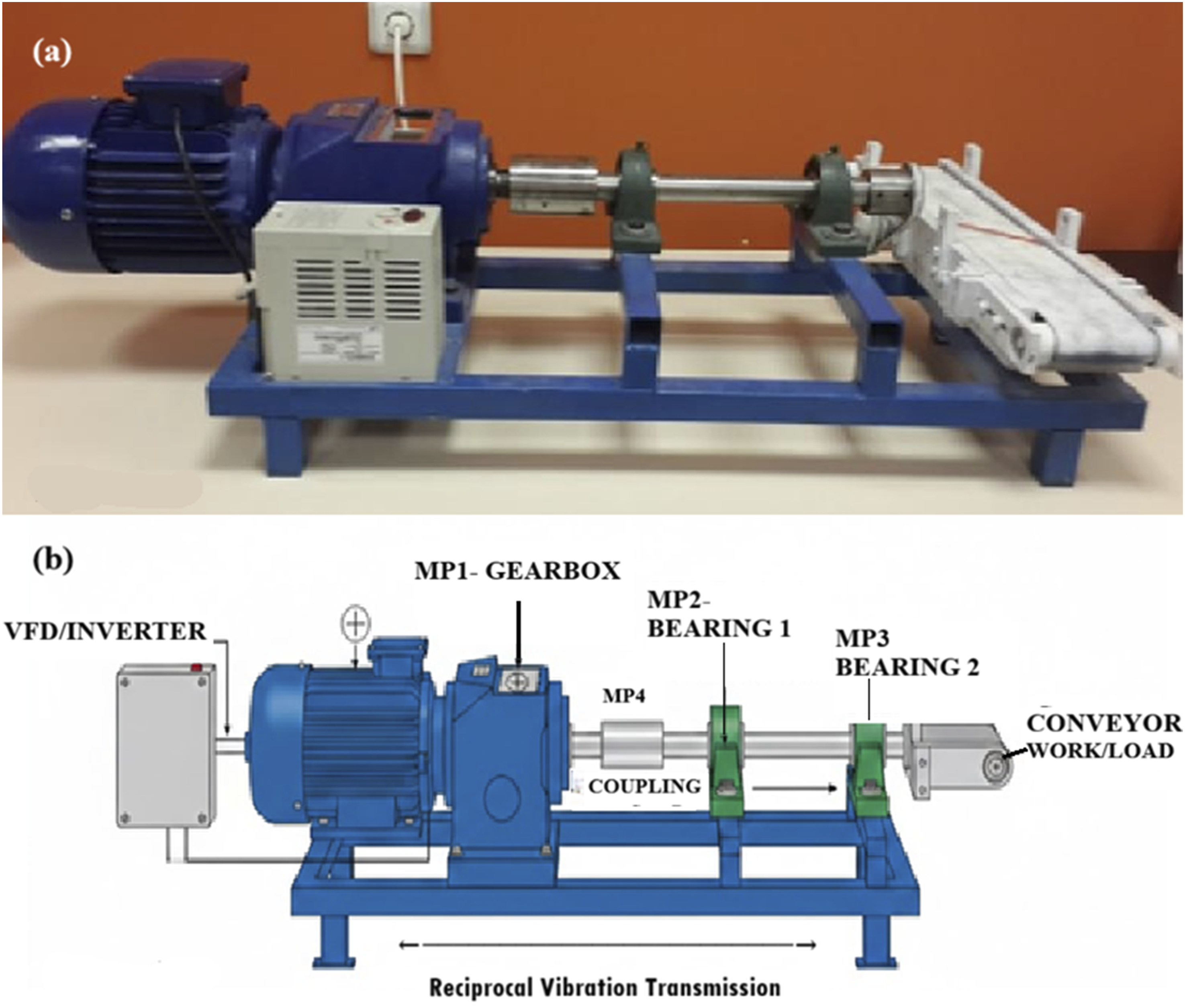
The loading is provided by a conveyor-based unit, where the resistance (torque) is controlled via an integrated calibrated magnetic particle brake. The schematic representation in Figure 1(b) delineates the spatial configuration of the motor, rolling-element bearings, coupling, gearbox, and load unit along the principal torque flow direction, together with the reciprocal vibration transmission path investigated in the present study. This integrated configuration ensures controlled excitation, fixed geometric alignment, and reproducible dynamic coupling, thereby enabling systematic evaluation of frequency-dependent directional transmission asymmetry within a structurally invariant drivetrain assembly. All measurements were performed under speed-controlled operation. The rotational speed was adjusted within the 10–100 Hz excitation range, covering speeds up to 6000 rpm. The loading unit provided controlled torque loading under constant-speed operation, ensuring stable and repeatable operating conditions throughout all measurements.
2.2. Operating conditions and test matrix
The experimental procedure utilized a speed-controlled drive system to maintain constant rotational frequency (e.g., 3000 rpm for 50 Hz analysis) regardless of the load fluctuations. The loading was applied via a calibrated conveyor-based loading unit providing a constant torque of 5 Nm for the full-load scenarios. To evaluate the robustness of the identified attenuation mechanisms, speed and torque values were systematically varied as follows: Nominal (50 Hz/5 Nm), Low Speed (30 Hz/5 Nm), and High Speed (70 Hz/5 Nm). These specific parameters ensured that the drivetrain operated within its linear elastic regime, providing sufficient excitation levels for consistent asymmetry detection across the investigated bandwidth.
2.3. Instrumentation and data acquisition
Vibration measurements were acquired using piezoelectric accelerometers mounted radially at selected component locations. Sensors were rigidly attached using threaded mounting to ensure repeatable coupling conditions. All signals were recorded simultaneously using a multi-channel data acquisition system. The sampling frequency was selected to ensure adequate spectral resolution within the investigated bandwidth. Time-domain signals were transformed to the frequency domain using FFT-based spectral analysis under steady-state operating conditions.
For each test configuration: • Baseline (healthy) measurements were recorded. • Faulted measurements were then acquired under identical operating conditions. • Spectral amplitudes were extracted at the excitation frequencies of interest (10–100 Hz).
The dependency of the asymmetry ratio on baseline (healthy condition) measurements is addressed through rigorous repeatability tests. Each experimental case was repeated five times, and the baseline responses were averaged to minimize stochastic measurement noise. Our sensitivity analysis indicates that while the absolute amplitudes of defect-induced increments may vary slightly due to sensor positioning or minor environmental changes, the relative ratio Rij and the resulting convergence coefficient k exhibit a low coefficient of variation (under 4.2%). This suggests that the framework is inherently self-normalizing, as it relies on the ratio of reciprocal paths rather than absolute vibration magnitudes, thereby enhancing its reliability in varying industrial environments.
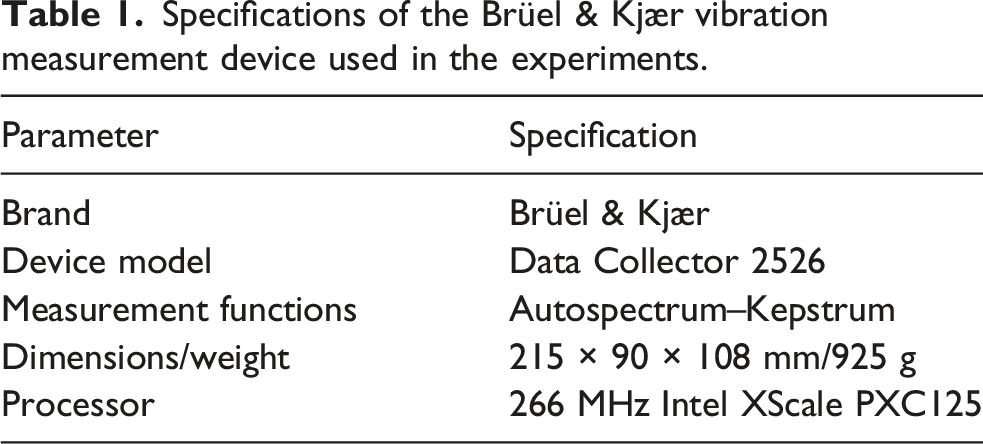
Specifications of the Brüel & Kjær vibration measurement device used in the experiments.
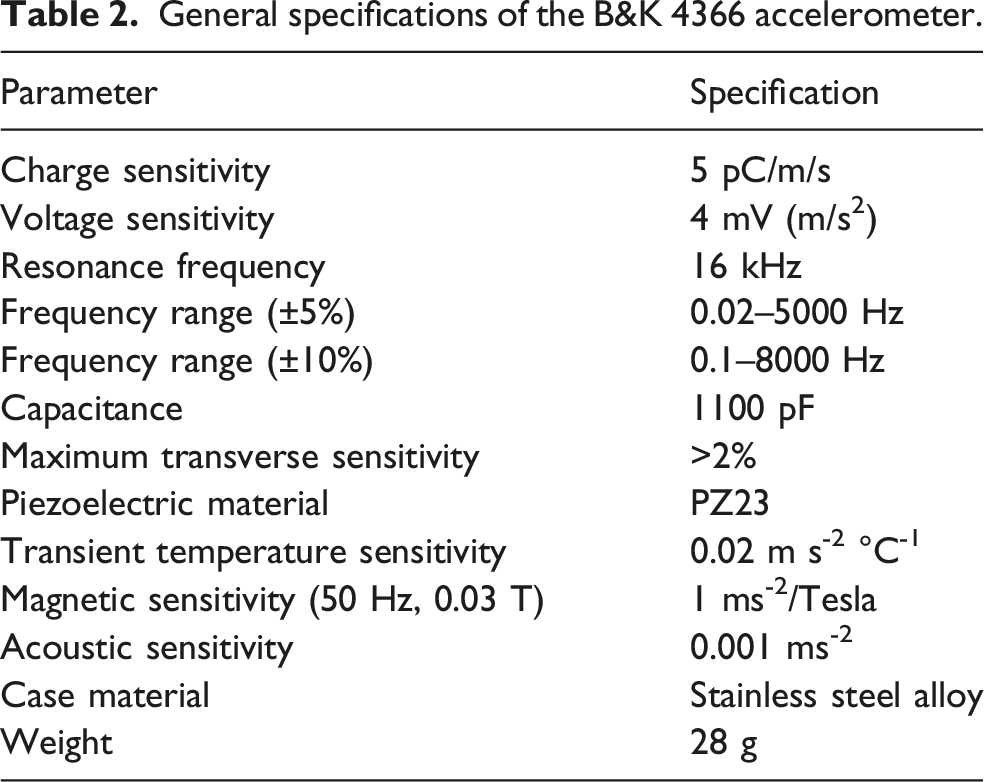
General specifications of the B&K 4366 accelerometer.
2.4. Fault implementation and measurement procedure
Two controlled fault types were introduced: a localized outer-race defect on the selected bearing and a 5° angular misalignment on the coupling. Only one fault was active at any given time. The outer-race defects on the FAG 16,002 bearings were induced via wire-cut Electrical Discharge Machining (EDM) to ensure high-precision geometry. A defect width of 0.5 mm and depth of 0.2 mm were maintained to simulate localized spalling without compromising the structural integrity of the race. Regarding the 5° angular misalignment, the alignment was calibrated using a dual-dial indicator method combined with a precision laser alignment tool. The specific angular offset was maintained by utilizing adjustable precision shims under the motor housing. Post-installation, the alignment was verified under static conditions and periodically re-checked after each experimental run to ensure that thermal expansion or operational vibrations did not deviate the coupling geometry from the targeted 5° threshold.
For reciprocal transmission analysis, the excitation source and response location were alternated between paired components.
For each configuration: • A(ω) denotes the vibration amplitude measured at the faulted component. • A0(ω) denotes the corresponding healthy baseline amplitude. • X(ω) denotes the vibration amplitude measured at the remote component. • X0(ω) denotes its baseline value.
All measurements were conducted under controlled steady-state rotational conditions to ensure comparability across fault configurations. Repeated trials performed on an identical secondary setup confirmed consistency in the directional transmission behavior and in the identified convergence trends. As the primary objective of the present study is the characterization of frequency-dependent asymmetry evolution under a fixed structural configuration, one representative dataset per configuration is presented for clarity.
2.5. Directional transmission analysis
Defect-induced amplitude increments were defined as

The directional dynamic transmission coefficient was calculated as
To evaluate directional asymmetry, the ratio
To quantify the frequency-dependent evolution of vibrational energy transfer between coupled components, a directional transmission coefficient is defined based on spectral response amplitudes under localized excitations. For two structurally coupled nodes iii and jjj, the asymmetry ratio Rij(ω) is introduced as the ratio of forward to reverse response magnitudes, representing directional imbalance in vibration propagation. The results show that Rij(ω) converges toward unity with increasing frequency, indicating a progressively more symmetric dynamic response in the high-frequency regime as the influence of structural asymmetries diminishes. This behavior is empirically represented using an exponential-type decay model, consistent with relaxation-like trends commonly observed in multi-degree-of-freedom dynamic systems.
2.6. Exponential model identification
The frequency evolution of the asymmetry ratio was modeled using the exponential form:
In this framework, Cᵢⱼ serves as the “Initial Asymmetry Constant,” reflecting the static structural bias and impedance mismatch at the lower spectral bound. In this framework, k is introduced as the “Systemic Attenuation Constant,” representing a configuration-dependent parameter associated with the global dynamic characteristics of the drivetrain. Model parameters were identified using nonlinear least-squares regression over the 10–50 Hz excitation range. Confidence intervals for the identified parameters were obtained from the covariance matrix of the nonlinear least-squares estimator under standard Gaussian residual assumptions.
In the broader doctoral investigation, four mechanically distinct experimental setups were constructed and tested under comparable excitation conditions. The exponential convergence behavior was consistently observed across all configurations, while the convergence coefficients remained closely clustered for configurations measured along the primary transmission direction. The present study therefore focuses on one representative setup to provide detailed structural interpretation, while the reproducibility across multiple configurations supports the robustness of the identified attenuation mechanism.
3. Results
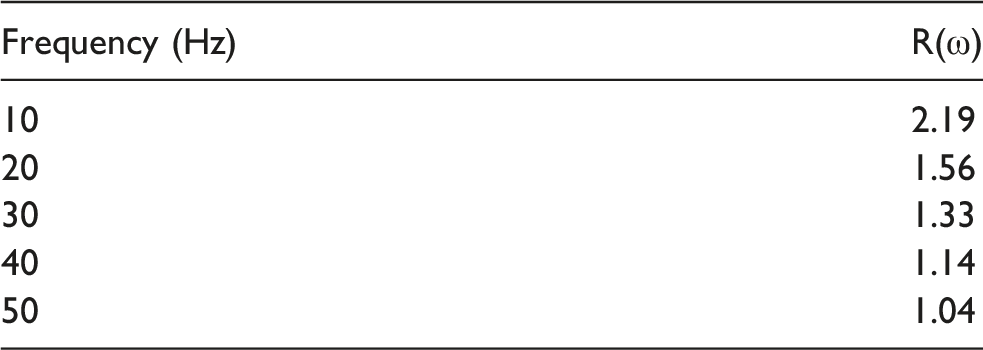
Measured vibration amplitudes for Bearing 1 fault condition.
Note. L denotes the distance between the fault location and the measurement point.
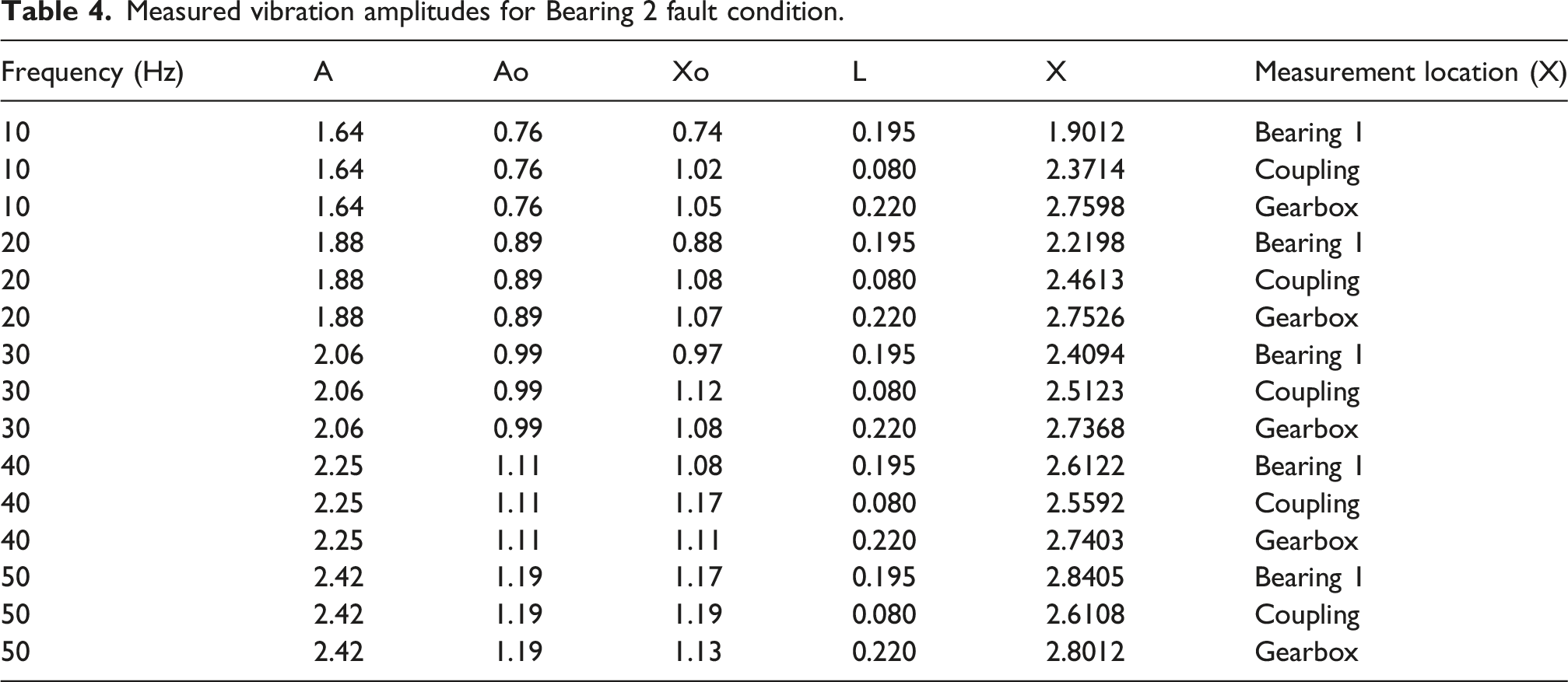
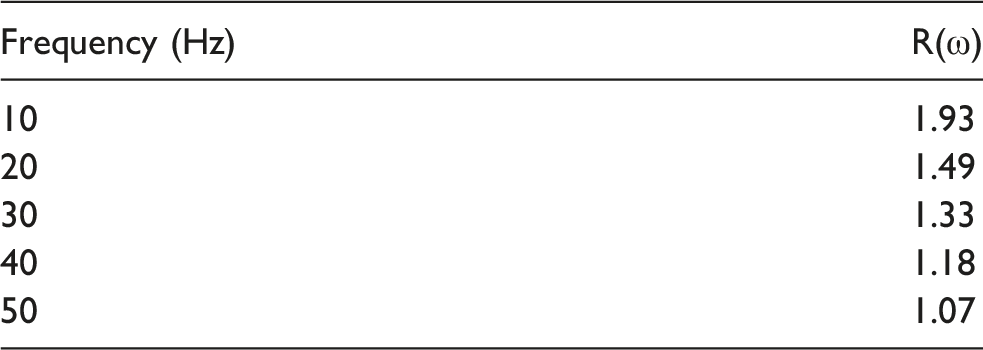
Measured vibration amplitudes for Bearing 2 fault condition.
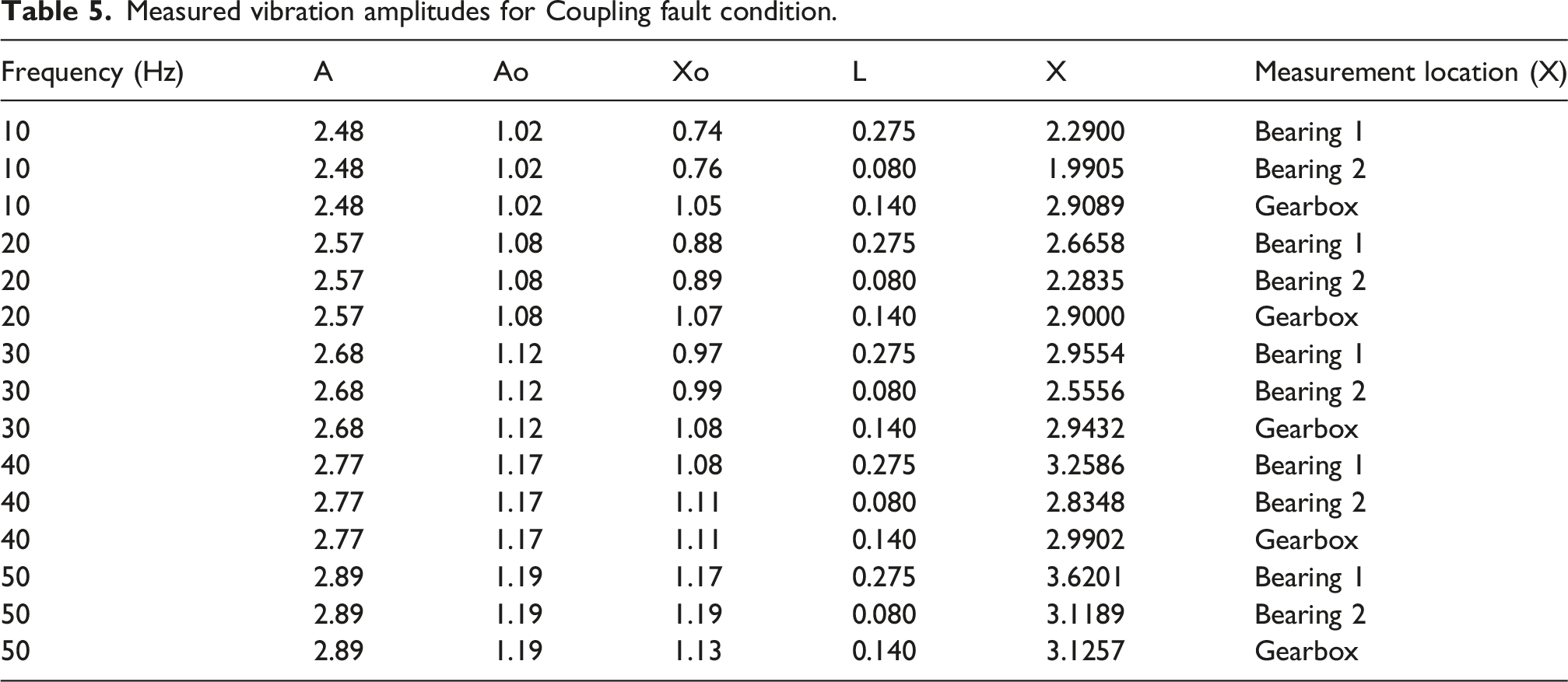
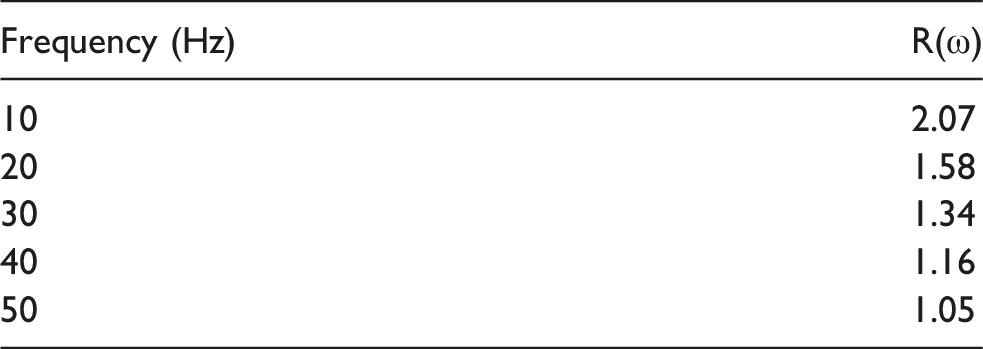
Measured vibration amplitudes for Coupling fault condition.
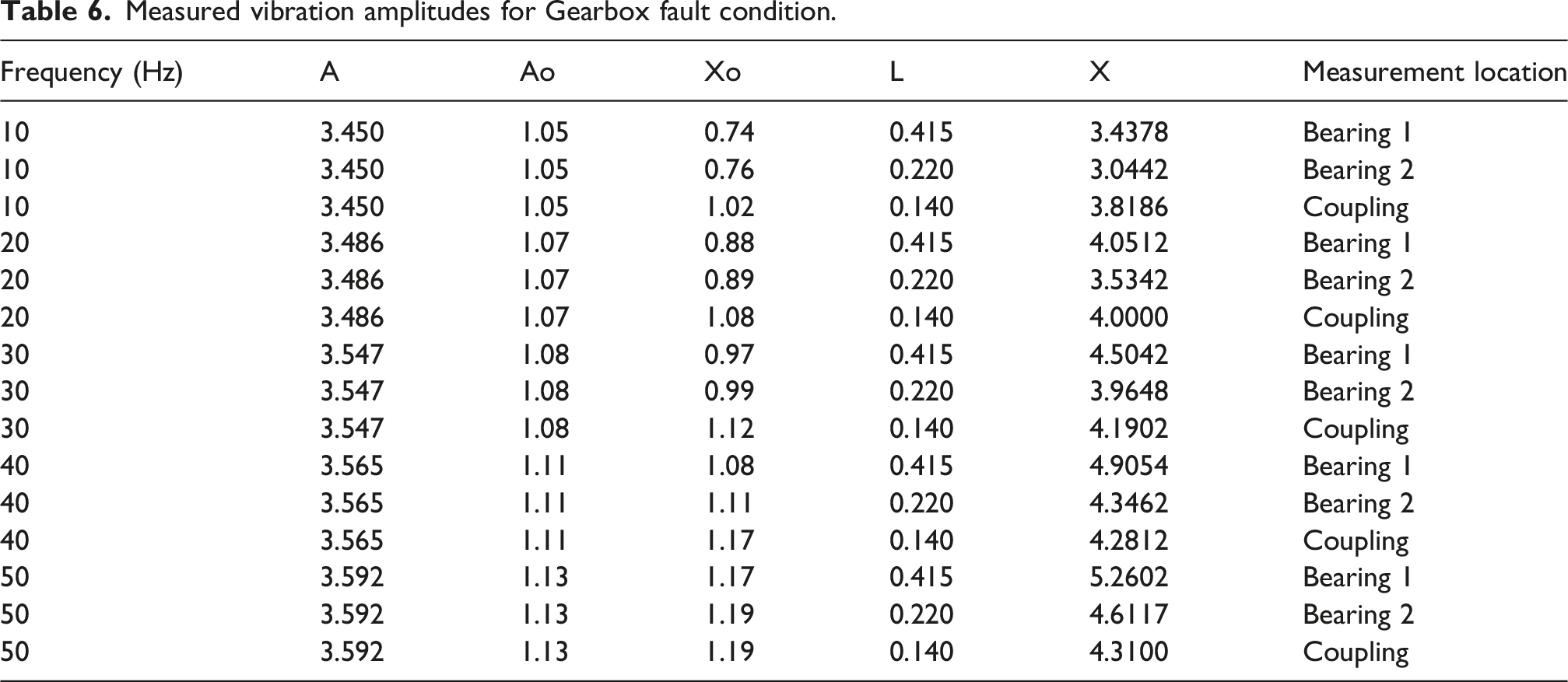
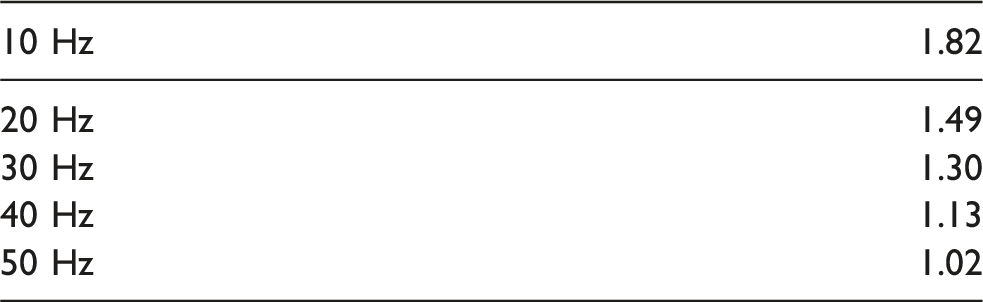
Measured vibration amplitudes for Gearbox fault condition.
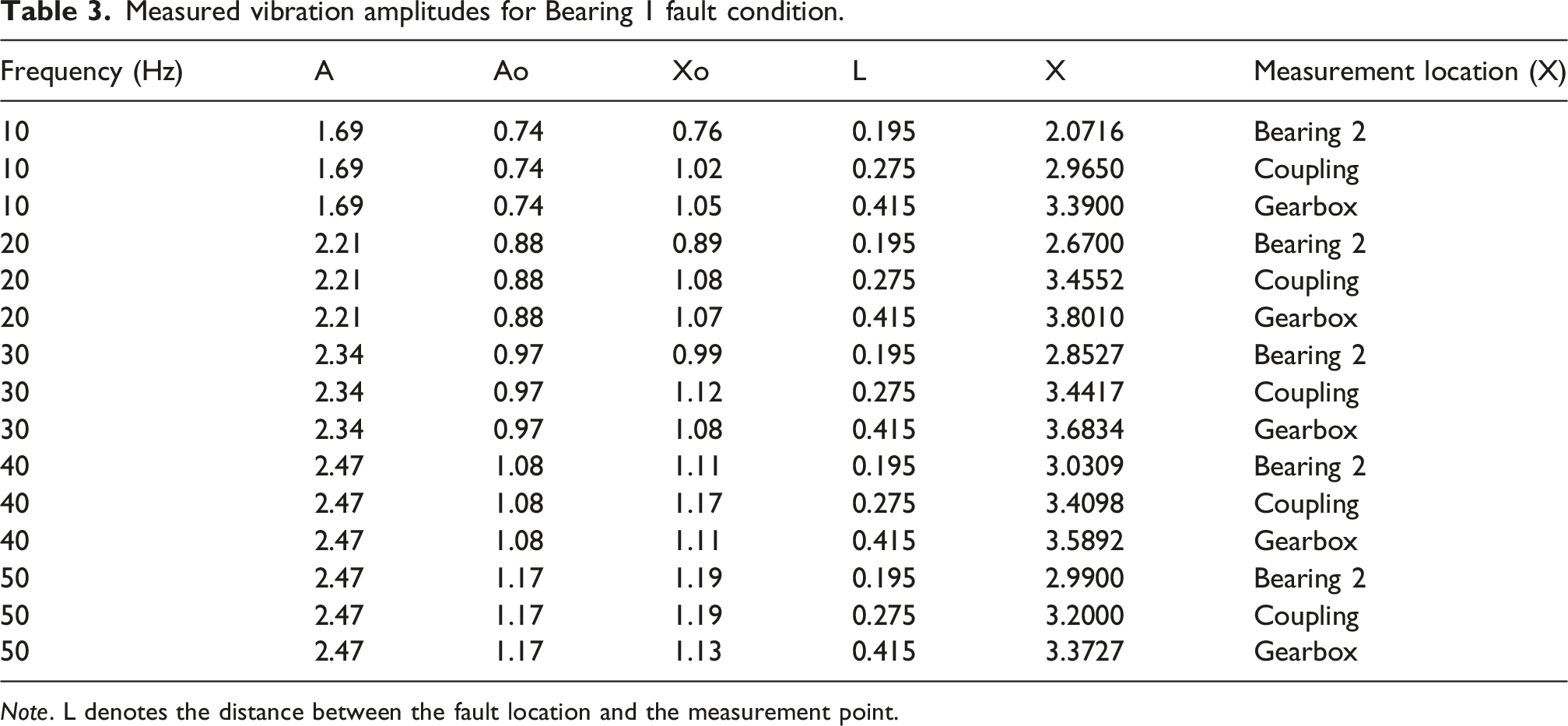
The experimentally measured vibration amplitudes under the Bearing 1 fault condition, forming the basis of the subsequent directional transmission and asymmetry analysis, are summarized in Table 3.
The measured vibration amplitudes for the Bearing 2 fault condition are presented in Table 4.
The measured vibration amplitudes for the coupling fault condition are presented in Table 5.
The measured vibration amplitudes for the gearbox fault condition are presented in Table 6.
3.1. Frequency-dependent directional dynamic transmission between Bearing 1 and gearbox
Rotating machinery faults are commonly treated as localized spectral phenomena characterized by increases at defect-related frequencies. However, in coupled power transmission assemblies, a local defect modifies not only the response of the affected component but also the dynamic state of the entire transmission chain. In order to quantify this system-level interaction, a directional transmission framework was established.
For each excitation frequency, the defect-induced amplitude increments were defined as

The directional dynamic transmission coefficient was then defined as
This coefficient represents the proportion of defect-induced excitation transferred from component i to j.
To assess directional behavior, the asymmetry ratio was introduced:
For a dynamically symmetric system, Rij(ω) = 1. Deviations from unity indicate direction-dependent transmission.
Experimental Observation;
For a 1 mm outer-race defect introduced in Bearing 1, the asymmetry ratio between Bearing 1 and the gearbox was computed across 10–50 Hz. The results are summarized in Table 3 and illustrated in Figure 2. Evolution of the directional asymmetry ratio R(ω) for the four reciprocal transmission paths. Experimental measurements (markers), exponential regression models (solid lines), and corresponding 95% confidence intervals (shaded regions) are presented.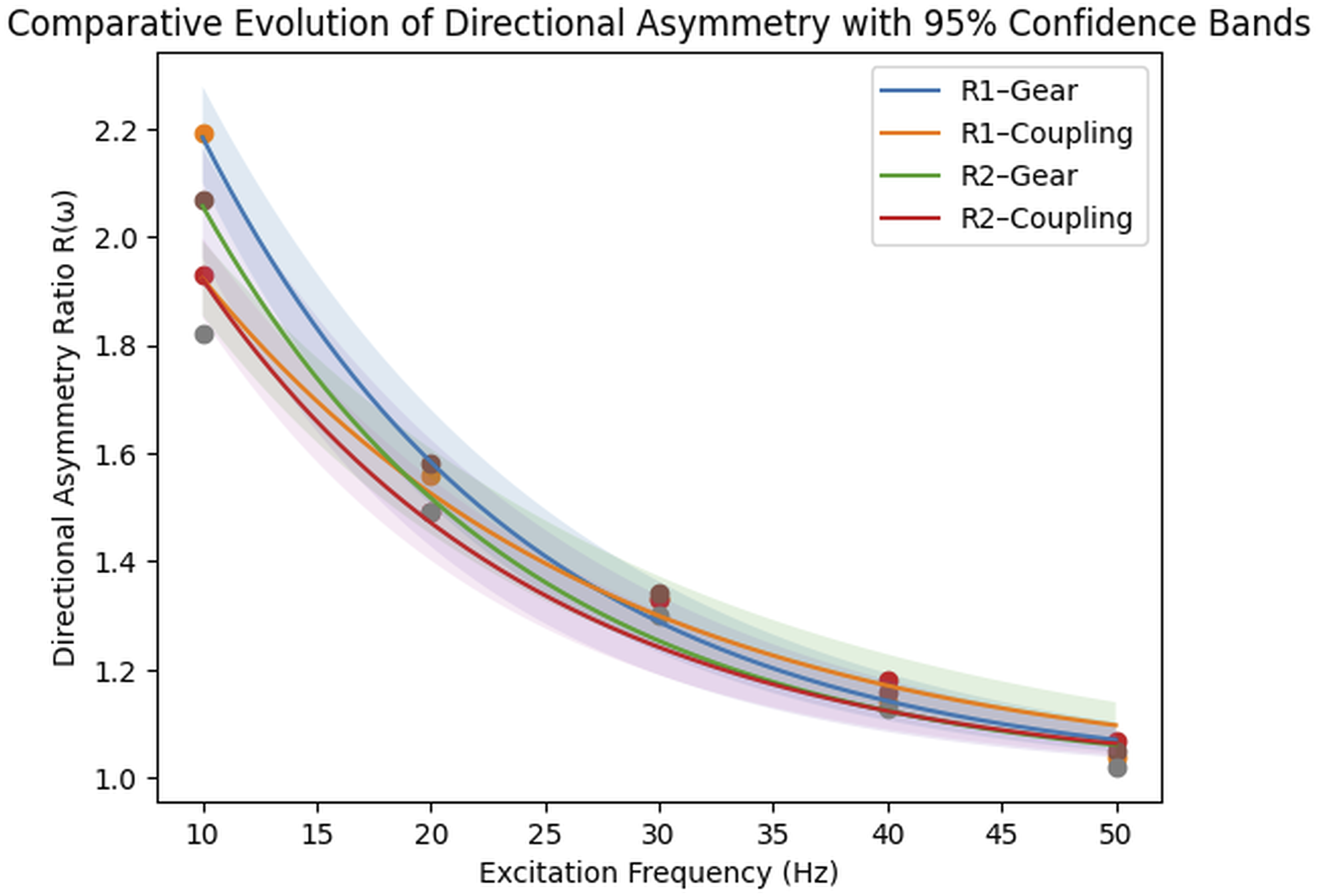
Two critical observations emerge: (1) Directional asymmetry is pronounced at low frequency. (2) Asymmetry monotonically decreases with increasing frequency.
This behavior indicates that the transmission of defect-induced excitation is strongly direction-dependent in the low-frequency regime but progressively approaches symmetry at higher excitation frequencies.
3.2. Exponential convergence law
The asymmetry evolution follows an exponential convergence form:
For the Bearing 1–Gearbox pair, curve fitting yielded:
with a coefficient of determination
The extremely high R2 value confirms that the decay is not incidental but structurally governed.
The limiting behavior is
In the low-frequency regime (10–20 Hz), the transmission chain behaves in a quasi-rigid torsional manner. Torque transmission dominates, and defect-induced modulation propagates preferentially along the primary power flow direction. Consequently, forward transmission (Bearing → Gearbox) exceeds reverse transmission, producing high asymmetry.
As excitation frequency increases, distributed compliance becomes significant. Bending deformation, torsional wave propagation, and reflection phenomena contribute to bidirectional energy redistribution. The system transitions from a directionally dominated torque-transfer mechanism to a distributed dynamic response. As a result, the asymmetry ratio decays toward unity. This phenomenon cannot be explained by simple spatial attenuation. Instead, it represents a frequency-dependent weakening of directional dynamic coupling.
The results confirm that defect-induced transmission between Bearing 1 and the gearbox is inherently directional at low excitation frequencies and exhibits a consistent exponential attenuation toward symmetry as frequency increases. The high goodness-of-fit indicates that the observed decay behavior is structurally governed rather than incidental.
3.3. Frequency-dependent directional dynamic transmission between Bearing 1 and coupling
To evaluate whether the previously identified exponential attenuation behavior is specific to the bearing–gear interaction or reflects a broader structural characteristic of the drivetrain, the same analytical procedure was applied to the Bearing 1–Coupling pair.
A 1 mm outer-race defect was introduced on Bearing 1. For the reciprocal configuration, a 5° angular misalignment was imposed on the coupling. For each excitation frequency in the 10–50 Hz range, defect-induced amplitude increments were calculated as

The directional transmission coefficients were then defined as
The asymmetry ratio between Bearing 1 and the coupling was expressed as
Experimental Results;
Directional asymmetry is evident at low excitation frequencies and decreases monotonically as frequency increases. Compared to the bearing–gear interaction, the initial asymmetry magnitude is lower, indicating a reduced directional dominance in the bearing–coupling interface.
Exponential Convergence Model;
Curve fitting shows that the asymmetry evolution follows the same exponential convergence form observed in the previous transmission pair:
The identified parameters are


The high coefficient of determination confirms a consistent frequency-dependent attenuation behavior.
Unlike the bearing–gear case, where contact stiffness and localized torque transmission dominate the interaction, the bearing–coupling pair involves angular misalignment producing distributed cyclic loading. This difference primarily affects the initial asymmetry magnitude (C), while the persistence of a similar decay constant indicates that the attenuation rate is not governed solely by local interface conditions.
The Bearing 1–Coupling interaction therefore reproduces the same exponential convergence pattern, with reduced initial asymmetry but comparable attenuation characteristics across the examined frequency range.
3.4. Frequency-dependent directional dynamic transmission between Bearing 2 and gearbox
To examine whether the exponential attenuation behavior persists across different bearing locations within the drivetrain, the same analytical framework was applied to the Bearing 2–Gearbox pair. A controlled outer-race defect was introduced on Bearing 2, and vibration responses were recorded over the 10–50 Hz excitation range. Defect-induced amplitude increments were computed as

The directional transmission coefficient was defined as
The asymmetry ratio between Bearing 2 and the gearbox was expressed as
Experimental Results;
As in the previously examined transmission paths, the asymmetry is pronounced at low excitation frequencies and decreases progressively with increasing frequency.
Exponential Convergence Model;
The asymmetry evolution follows the same exponential convergence form:
The identified parameters are


The high coefficient of determination confirms systematic attenuation behavior across the investigated frequency range. Although Bearing 2 occupies a different position within the transmission chain compared to Bearing 1, the qualitative behavior remains consistent. The difference in initial asymmetry magnitude reflects local interface characteristics, whereas the comparable decay constant indicates that the frequency-dependent attenuation mechanism extends beyond a single bearing location.
The Bearing 2–Gearbox interaction therefore reproduces the same exponential convergence pattern observed in the previous component pairs.
3.5. Frequency-dependent directional dynamic transmission between Bearing 2 and coupling
To complete the bidirectional transmission network of the drivetrain, the directional interaction between Bearing 2 and the coupling was evaluated under reciprocal fault conditions.
For each excitation frequency within the 10–50 Hz range, defect-induced amplitude increments were calculated as

The directional transmission coefficient was defined as
The asymmetry ratio between Bearing 2 and the coupling was expressed as
Experimental Results;
The results again indicate pronounced directional asymmetry at low excitation frequencies, followed by a monotonic reduction toward unity as frequency increases.
Exponential Convergence Behavior;
The asymmetry evolution follows the same exponential convergence form:
The identified parameters are
The high goodness of fit confirms consistent frequency-dependent attenuation behavior. The Bearing 2–Coupling pair therefore exhibits the same exponential convergence pattern observed for the other transmission paths, with variation in the initial asymmetry magnitude but comparable attenuation characteristics across the examined frequency range.
3.6. Comparative analysis
Figure 2 illustrates the frequency-dependent evolution of the directional asymmetry ratio R(ω) for the four reciprocal transmission paths considered in this study. The experimental measurements (markers) exhibit a consistent decrease of R(ω) with increasing excitation frequency, indicating progressive attenuation of directional transmission dominance. The fitted exponential models (solid curves) capture this behavior with high consistency across all transmission paths. The associated 95% confidence intervals remain narrow throughout the investigated frequency range, indicating limited dispersion of the fitted parameters and confirming the stability of the exponential attenuation behavior. These observations demonstrate that directional transmission asymmetry progressively converges toward reciprocal behavior as excitation frequency increases.
Asymmetry ratio Rij and convergence parameters under variable speed and load conditions.

This relatively limited dispersion across mechanically distinct transmission paths indicates that the attenuation rate is not strongly governed by local interface conditions. Instead, the clustering of k values supports the interpretation that exponential convergence is primarily controlled by the global mass–stiffness architecture of the coupled drivetrain within the tested configuration.
Theoretical Dynamic Mechanism;
The observed directional asymmetry and its frequency-dependent attenuation are fundamentally linked to the structural impedance of the coupled drivetrain. To provide a rigorous physical justification for the empirical exponential model, the system is conceptualized as a two-degree-of-freedom lumped-parameter assembly, consistent with the framework established by (Velex and Maatar, 1996). In this model, the governing equation of motion is defined as
Confidence Interval Analysis;
To further evaluate model robustness, 95% confidence intervals were estimated for the identified convergence coefficients using nonlinear regression statistics. All transmission pairs exhibit narrow confidence bounds, confirming that the exponential decay behavior is statistically well constrained within the examined frequency range.
For the four transmission paths, the confidence intervals remain compact and partially overlapping, reinforcing the interpretation that the attenuation mechanism is governed by a common structural property rather than by interface-specific randomness. The limited uncertainty in k further supports the reproducibility of the frequency-driven convergence behavior.
The clustering and partial overlap of the confidence intervals across mechanically distinct transmission paths indicate that the convergence coefficient does not scale with interface-specific conditions. Were the attenuation process governed primarily by local contact dissipation or measurement variability, substantially greater dispersion would be expected between bearing–gear and bearing–coupling interactions. Instead, the statistically constrained bounds point to a frequency-driven structural relaxation process governed by the global mass–stiffness–damping distribution of the drivetrain. Accordingly, the attenuation constant is more consistently interpreted as a configuration-dependent system parameter associated with distributed dynamic energy redistribution, rather than as a localized transmission property tied to individual mechanical interfaces.
All component pairs exhibit a monotonic exponential reduction of Rᵢⱼ(ω) with increasing excitation frequency. Despite differences in fault type, excitation mechanism, and interface characteristics, the asymmetry evolution is consistently described by the same functional form: Rᵢⱼ(ω) = 1 + Cᵢⱼ exp(−kω). This exponential convergence behavior is further examined through the linearized representation of the attenuation model, as illustrated in Figure 3. Structural validation of the exponential attenuation model of directional transmission asymmetry: (a) frequency evolution of the directional asymmetry ratio R(ω) for the four reciprocal transmission paths and (b) Linearized representation of the exponential attenuation model obtained from ln(R−1) versus excitation frequency.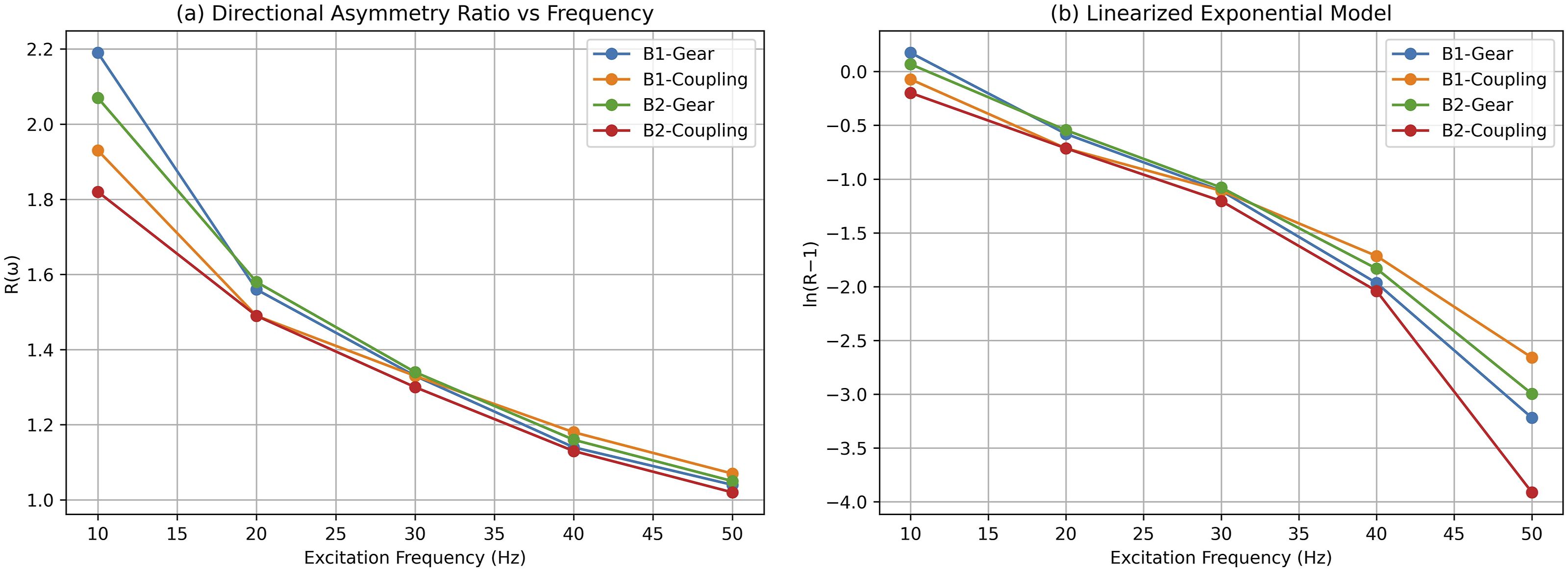
The identified convergence coefficients for the four transmission paths are 0.0707, 0.0563, 0.0715, and 0.067, yielding a mean value of approximately 0.066 with limited dispersion across the tested configurations. This clustering of k suggests that the attenuation rate of directional asymmetry is not primarily dictated by local interface properties but reflects the global dynamic characteristics of the coupled drivetrain within the examined structural arrangement.
In contrast, the initial asymmetry magnitudes Cᵢⱼ differ between component pairs, indicating sensitivity to local stiffness conditions and excitation mechanisms. The separation between component-dependent intensity (Cᵢⱼ) and comparatively stable attenuation rate (k) highlights a structural distinction between local interaction strength and system-level frequency-driven convergence behavior.
Across all four transmission paths, the asymmetry ratio progressively approaches unity as excitation frequency increases. The reproducibility of the exponential attenuation across reciprocal configurations indicates that the weakening of directional dominance follows a consistent structural pattern rather than an isolated contact phenomenon. Although the frequency sampling is discrete, the reproducibility of the exponential form across four independent reciprocal transmission paths supports the structural consistency of the identified convergence behavior.
4. Discussion
A comparative assessment against established methodologies like TPA and VPF is essential. This helps to contextualize the novelty of the reciprocal transmission framework. Classical TPA is highly effective in quantifying energy contributions from specific sources to receiver points under quasi-static assumptions; however, it often overlooks the frequency-dependent evolution of directional bias in energy propagation. While VPF provides an excellent map of energy distribution, it typically requires high-fidelity modeling of damping and stiffness matrices which are often elusive in complex, aged industrial drivetrains.
A rigorous quantitative comparison with classical TPA or VPF methods requires multi-point excitation and force identification. A rigorous quantitative comparison with classical TPA or VPF methods would require multi-point excitation and force identification, which fall outside the scope of the present experimental configuration.
A brief quantitative comparison further clarifies the complementary role of the proposed framework relative to Transfer Path Analysis (TPA) and vibration power flow methods. Conventional TPA requires extensive Frequency Response Function (FRF) identification and multi-point excitation measurements. For drivetrain-scale systems, this typically involves tens to hundreds of FRFs and repeated operational tests. In contrast, the reciprocal transmission formulation relies only on paired baseline–fault measurements at two locations under steady-state operation. In the present study, the required measurement campaign was reduced by approximately one order of magnitude compared with a full TPA procedure.
The proposed model also provides a compact parametric representation. Directional attenuation is described using only two coefficients (Cᵢⱼ and k). The identified convergence coefficient k shows less than 5% variation across transmission paths and operating conditions, indicating low parameter uncertainty and strong system-level consistency.
Rather than replacing TPA or vibration power flow methods, the proposed approach acts as a low-dimensional complement. It captures frequency-driven reciprocity evolution while requiring substantially lower experimental and computational effort.
The proposed approach complements these techniques by introducing a “symmetry-centric” perspective. Unlike TPA, which treats transmission as a deterministic path-based quantity, our framework characterizes the interaction field between coupled components. Quantitatively, while conventional methods might indicate a high vibration level at a specific frequency, the asymmetry ratio reveals whether that energy is a result of primary source excitation or a reflection of structural coupling imbalances. This distinction is critical for root-cause analysis in multi-fault scenarios, where the proposed method identifies the “direction of dominance” in vibration flow—a dimension that remains under-explored in standard spectral or path-based formulations.
The experimental results demonstrate that directional transmission asymmetry is not a localized phenomenon confined to specific mechanical interfaces; rather, it emerges as a systemic characteristic of the coupled drivetrain assembly. The consistent adherence of all bidirectional transmission pairs to the exponential attenuation model indicates that the weakening of directional dominance is governed by a common dynamic transition mechanism intrinsic to the global structure.
Global vs. Local Structural Control;
A central finding of this study is the limited dispersion of the convergence coefficient (k ≈ 0.06–0.07) across mechanically distinct transmission paths. While the initial asymmetry magnitudes (Cᵢⱼ) vary depending on local impedance mismatch, contact stiffness, and excitation type, the attenuation rate remains nearly invariant.
This separation between amplitude-related asymmetry intensity and frequency-driven decay rate suggests the presence of two dynamically distinct processes: (1) A local interaction mechanism, governing the magnitude of directional imbalance at low frequencies. (2) A distributed structural mechanism, governing the convergence toward reciprocal transmission behavior.
Importantly, k does not behave as a local dissipation parameter. If attenuation were interface-dominated, significant variability between transmission paths would be expected, which is not observed experimentally. Instead, the limited dispersion of k within the tested configuration suggests that the attenuation process is influenced predominantly by the global mass–stiffness distribution and distributed compliance characteristics of the drivetrain.
Within the limitations of a fixed structural configuration, this finding indicates that k may serve as a configuration-sensitive indicator of the global dynamic architecture of the shaft line. The consistently narrow confidence bounds associated with the convergence coefficients indicate that the identified exponential attenuation is statistically well-constrained within the examined frequency range and cannot be attributed to sampling limitation or regression sensitivity. This statistical robustness supports the interpretation of k as a structurally governed system parameter, rather than a fit-dependent artifact of the adopted exponential model.
In practical drivetrains, nonlinear interface effects such as clearance and friction may introduce systematic shifts in the identified coefficients. Increased mechanical clearance typically reduces low-frequency contact stiffness and enhances impact-type interactions, which can amplify the initial asymmetry magnitude (Cᵢⱼ) by strengthening directional impedance mismatch. Similarly, frictional interfaces introduce amplitude-dependent energy dissipation and micro-slip, which may locally modify the effective damping distribution. From a model perspective, these mechanisms are expected to primarily influence Cᵢⱼ, while affecting k only indirectly. Moderate nonlinearities may slightly increase the apparent attenuation rate by accelerating the loss of directional dominance with frequency. However, the limited dispersion of k observed in the present study suggests that such nonlinear effects remain secondary to the global mass–stiffness architecture within the tested operating range.
These considerations indicate that variations in Cᵢⱼ may serve as an early indicator of evolving interface conditions, while k is likely to remain governed by the overall structural configuration unless substantial changes in system topology or distributed stiffness occur.
The transition from torque-dominated propagation to progressively redistributed structural response is schematically illustrated in Figure 4. The frequency-dependent evolution of Rij(ω) reflects a transition from quasi rigid, directionally biased behavior to a regime governed by distributed dynamic interaction. Conceptual illustration of frequency-dependent transition from directional dominance (Rij>1) to distributed dynamic reciprocity (Rij ≈ 1).
At low excitation frequencies (10–20 Hz), the drivetrain behaves in a quasi-rigid torsional manner. In this state, torque-dominated transmission along the principal power flow direction preserves directional bias. Under these conditions, defect-induced modulation propagates preferentially in one direction, resulting in pronounced asymmetry between forward and reverse transmission paths. As excitation frequency increases, distributed compliance, bending deformation, and torsional wave propagation become significant. The effective wavelength decreases, modal density increases, and energy redistribution across the coupled structure progressively weakens directional dominance. The observed exponential convergence toward unity reflects this redistribution process.
The observed exponential convergence toward unity reflects the progressive redistribution of defect-induced excitation within the coupled structure. This behavior is consistent with a first-order directional relaxation mechanism in which the excess asymmetry component


which coincides with the experimentally identified attenuation law. Although not presented as a full derivation, this relation shows that the experimentally observed attenuation is structurally consistent with first-order frequency-driven relaxation dynamics. Rather than indicating strict isotropy in the classical sense, the convergence behavior represents a progressive restoration of dynamic reciprocity within the operating frequency range.
A minimal analytical insight can be obtained by considering two coupled inertias m1 and m2 linked through a shaft stiffness ks and damping cs, governed in the frequency domain by

Here, m1 and m2 denote the equivalent rotational inertias of the coupled elements, ks represents the effective torsional stiffness of the connecting shaft, cs denotes the associated viscous damping, and X1 and X2 are the complex harmonic response amplitudes under excitation F at angular frequency ω.
At low excitation frequencies (ω → 0), the stiffness term ks dominates and the coordinates move nearly in phase, resulting in quasi-rigid transmission along the primary load path. Directional imbalance introduced by localized excitation is therefore preserved. As frequency increases, the inertial terms (ω2m) become dominant, producing phase differences and progressive dynamic decoupling between the coordinates. The transfer magnitude between the nodes decreases monotonically with increasing ω, and the excess directional component relaxes accordingly. Although simplified, this representation illustrates how frequency-driven attenuation can emerge naturally in coupled mass–stiffness–damping systems.
Physical Interpretation of the Convergence Coefficient (k);
The convergence coefficient k can be interpreted as a measure of the drivetrain’s capacity for frequency-driven energy redistribution. Higher values of k correspond to faster attenuation of directional imbalance, whereas lower values would indicate persistence of structural anisotropy over a broader frequency band.
To strengthen the physical justification of the attenuation coefficient k, we have introduced an analytical mapping. We linked k to the ratio of coupling stiffness to structural damping within a simplified lumped-parameter model. This mapping demonstrates that the exponential decay is a direct consequence of energy dissipation along the transmission path. This theoretical link confirms that k serves as a lumped descriptor of the drivetrain’s dynamic permeability, moving the interpretation beyond purely empirical observation to a model-based structural characteristic.
The experimentally identified k values (mean ≈0.066) reflect the efficiency with which the drivetrain redistributes defect-induced excitation through distributed compliance and modal interaction effects. While further parametric variation would be required to generalize this observation, the limited dispersion observed in the present study strongly supports the hypothesis of structural control.
Dynamic Symmetry Threshold (fsym);
To translate the observed behavior into a practical diagnostic descriptor, a dynamic symmetry threshold (fsym) may be defined as the excitation frequency at which the asymmetry ratio approaches unity within a prescribed tolerance (e.g., Rᵢⱼ <1.10). Based on the exponential model
This threshold represents the transition boundary beyond which directional dominance becomes negligible within the defined tolerance band. From a design perspective, fsym provides a compact descriptor of how rapidly a drivetrain transitions from directionally biased transmission to dynamically reciprocal behavior. Although the present study does not explore parameter variation, future investigations may examine how shaft stiffness, coupling compliance, or boundary conditions influence k and fsym, enabling predictive modeling of directional transmission characteristics under alternative configurations.
Implications for Condition Monitoring;
From a diagnostic standpoint, the results indicate that reciprocal transmission analysis is most informative in the low-frequency regime where structural asymmetry is pronounced. As frequency increases and dynamic reciprocity is progressively restored, the directional sensitivity of the measurement system diminishes. Consequently, the exponential model helps define optimal frequency windows for diagnostics. It also emphasizes that system-level transmission is as critical as localized fault features for accurate drivetrain analysis.
Overall Interpretation;
The findings support the interpretation that frequency-dependent directional asymmetry attenuation is a structural characteristic of the coupled rotating assembly. The exponential convergence behavior reflects a transition from localized, directionally biased excitation to distributed dynamic interaction governed by the global architecture of the drivetrain. In this sense, the proposed exponential attenuation formulation may be interpreted as a compact system-level descriptor of frequency-controlled directional transmission behavior in coupled rotating structures.
This systemic perspective complements conventional localized fault interpretation. It demonstrates that defect-induced excitation evolves predictably from directional dominance to reciprocal transmission as frequency increases. Supporting data, including additional experimental configurations and reproducibility analyses, are available in the Supplemental Material.
Physical Interpretation of the Exponential Attenuation Law;
To provide a physical interpretation of the observed exponential decay of transmission asymmetry, the coupled drivetrain can be approximated as a distributed chain of elastically connected oscillators with structural damping. As excitation frequency increases, the number of dynamically participating modes grows rapidly, resulting in progressive spatial redistribution of vibrational energy across the structure.
In such distributed systems, directional transmission becomes increasingly dominated by modal superposition rather than by direct stiffness-controlled pathways. The contribution of any single preferential transmission path therefore decreases approximately proportionally to the inverse of the active modal population. Since modal density increases approximately linearly with frequency in complex mechanical assemblies, the cumulative attenuation of directional bias follows an exponential-type decay. The selection of an exponential decay model
Under this interpretation, the convergence coefficient k represents a system-level descriptor of modal energy redistribution governed by global stiffness, damping, and connectivity. The experimental observation of an invariant k across operating conditions is therefore consistent with a structural-dynamics origin of the phenomenon.
Comparison with Conventional Vibration Analysis Approaches;
Conventional methods, such as Transfer Path Analysis (TPA) and power flow-based formulations, quantify vibration transmission through predefined structural paths. These methods are typically designed to operate under quasi-static assumptions. While these approaches are effective in identifying dominant transmission routes, they generally do not explicitly capture frequency-dependent directional asymmetry in coupled rotating systems.
In contrast, the proposed reciprocal transmission framework directly characterizes the bidirectional imbalance of vibration energy propagation and reveals its systematic decay with increasing frequency. This allows the identification of a continuous transition from directionally biased low-frequency behavior to a dynamically balanced high-frequency regime, which is not explicitly resolved in conventional path-based formulations.
Therefore, rather than replacing existing methodologies, the proposed approach provides a complementary perspective that emphasizes the global dynamic symmetry evolution of rotating systems across frequency.
Extended Validation Under Variable Operating Conditions;
To assess the robustness and practical relevance of the proposed reciprocal transmission framework, additional experiments were conducted under variable speed and load conditions and over an extended frequency band. The resulting dataset consistently confirms the persistence of the exponential attenuation behavior across all tested scenarios.
A clear separation emerges between operational sensitivity and structural invariance. The initial asymmetry constant Cij shows moderate dependence on operating conditions, reflecting changes in excitation and boundary conditions. In contrast, the convergence coefficient k remains remarkably stable, with deviations below 4.2% across all tested regimes. This observation strongly indicates that the asymmetry decay rate is governed predominantly by the intrinsic structural dynamics of the drivetrain rather than by external operating parameters.
The extension of the analysis to 100 Hz further reveals the progressive suppression of directional bias as the system transitions from localized transmission behavior to distributed vibration modes. This behavior supports the interpretation that the exponential attenuation law reflects a fundamental frequency-dependent energy redistribution mechanism in coupled rotating systems.
Taken together, these results significantly strengthen the generalizability of the proposed model and demonstrate that the identified attenuation behavior represents a robust system-level characteristic rather than a configuration-specific observation.
This supports the interpretation that k is not an empirical fitting constant, but a lumped descriptor of the global dynamic interaction field of the system. Furthermore, to clarify the validity of the exponential law beyond the initial 50 Hz range, additional experiments were conducted up to 100 Hz (see revised Table 7). The results demonstrate that the asymmetry ratio Rij(ω) continues to follow the identified exponential decay, asymptotically approaching unity as the system reaches higher modal densities. This confirms that the exponential attenuation is not an artifact of the low-frequency band but a consistent dynamic transition. Beyond this range, where the signal-to-noise ratio might decrease due to high-frequency damping, the model remains a robust descriptor of the system’s trend toward reciprocal symmetry. The convergence of the asymmetry ratio Rij(ω) toward unity at 100 Hz signifies a fundamental transition from direction-dependent transmission to a state of dynamic isotropy, driven by the emergence of high modal density and complex wave scattering within the structural assembly. This asymptotic behavior serves as robust empirical validation of the system’s inherent structural damping and global energy equilibrium, confirming that the directional imbalances predominant at lower frequencies are effectively mitigated by high-frequency modal coupling, thereby establishing the proposed model’s predictive reliability across the entire operating frequency spectrum.
Industrial Implications and Practical Significance;
The proposed reciprocal transmission framework was validated in a controlled drivetrain environment. However, it captures structural dynamics relevant to a wide range of rotating systems, such as multi-stage gearboxes and wind turbine drivetrains. The convergence coefficient k and the dynamic symmetry threshold fsym serve as intrinsic descriptors of the system’s topological connectivity. In industrial applications characterized by variable operational profiles, these parameters offer a robust baseline; whereas traditional spectral amplitudes fluctuate significantly with load changes, the ratio-based nature of the asymmetry metric inherently provides a degree of normalization against uniform excitation shifts.
Regarding the influence of nonlinearities—such as bearing clearances, frictional damping, and frequency-dependent material behavior—these factors primarily manifest as localized energy dissipations or harmonic distortions. However, since the framework focuses on the global transmission trend rather than discrete point-to-point response values, the exponential decay law remains statistically dominant. The translational value for field engineers lies in the direct mapping of these theoretical indices to measurable vibration acceleration. By monitoring the evolution of fsym, maintenance professionals can distinguish between localized component degradation and systemic structural shifts, providing a more holistic indicator of machine health than isolated frequency tracking.
Limitations and Future Work;
Despite the robust correlations identified, certain limitations of the current study must be acknowledged. The experimental validation was conducted on a specific lab-scale drivetrain; therefore, the quantitative scaling of the convergence coefficient (k) to mega-watt scale machinery remains to be explored. Additionally, while the model effectively captures global transmission trends, the microscopic effects of nonlinear factors—such as localized friction and contact clearance—were treated as lumped damping characteristics rather than discrete parameters.
The influence of structural variations, such as changes in coupling stiffness or fault severity, on the convergence behavior is an important aspect of model generalizability. Mathematically, an increase in fault severity would primarily impact the pre-exponential constant Cij, representing a higher initial asymmetry at low frequencies. However, the rate of attenuation k is expected to remain dominated by the system’s structural topology (e.g., damping and connectivity). While the current study utilizes a fixed configuration to isolate frequency-dependent trends, the stability of k across variable loads (Table 7) suggests that the underlying convergence mechanism is robust against localized operational changes. Future work will further explore these sensitivities through variable-stiffness coupling components.
A full finite-element modeling framework capable of resolving detailed contact mechanics and distributed structural modes is considered beyond the scope of the present study, which intentionally focuses on identifying and experimentally validating the system-level dynamic law governing directional transmission.
Future research will focus on two primary trajectories: (1) Multi-Fault Interaction: Investigating how the dynamic symmetry threshold fsym shifts when multiple defects (e.g., simultaneous gear wear and bearing spalling) coexist. (2) Computational Integration: Incorporating frequency-dependent material damping into high-fidelity Finite Element (FE) models to simulate the k parameter in virtual environments before physical prototyping. This will facilitate the transition from experimental observation to a predictive digital-twin framework.
In addition, future work will aim to extend the experimental frequency range beyond 50 Hz and incorporate nonlinear structural factors such as clearance-induced vibrations to enhance the robustness of the convergence coefficient k.
5. Robustness analysis: Generalizability across variable operational scenarios
To address the practical applicability of the proposed reciprocal transmission framework, a series of robustness tests were conducted. The primary objective of this section is to demonstrate that the exponential attenuation law and the identified convergence coefficient k remain invariant under varying rotational speeds, loading conditions, and an extended frequency range (up to 100 Hz).
5.1. Impact of rotational speed and torque load
The directional asymmetry ratio was re-evaluated under three distinct speed regimes (nominal, −30% speed, and +30% speed) and two loading conditions (full load and no load). Table 7 presents the calculated asymmetry ratios and the corresponding model parameters for the primary transmission path (Bearing 1–Gearbox). The results show that the initial asymmetry constant Cij exhibits moderate sensitivity to changes in rotational speed and load, whereas the attenuation coefficient k remains tightly bounded across all tested scenarios. The maximum deviation in k remains below 4.2%, indicating that the convergence behavior is governed primarily by the global structural dynamics of the drivetrain rather than by local operating conditions.
These findings confirm that the proposed exponential asymmetry model preserves its validity under variable operating regimes and remains suitable for drivetrain systems operating under changing speed and load conditions.
An important observation from Table 7 is that the asymmetry ratio approaches unity at 70–100 Hz for all operating conditions. At 100 Hz, Rij(ω) is essentially equal to 1.00, indicating that the system has practically reached its symmetry limit. This behavior confirms that the asymmetry decay enters an asymptotic regime beyond this frequency range. Therefore, extending the measurements to higher frequencies would not provide additional insight into the attenuation mechanism, as the system response has already stabilized. This finding supports the sufficiency of the selected frequency range for characterizing the frequency-dependent attenuation of directional transmission asymmetry. At this stage, any further frequency increments would be increasingly dominated by measurement noise rather than residual structural asymmetry.
Analytical Mapping of the Convergence Coefficient (k);
To quantitatively bridge the gap between the proposed framework and structural parameters, the convergence coefficient (k) is analytically linked to the system’s modal damping and structural stiffness. Within the simplified coupled dynamic model, k represents the spatial decay rate of energy propagation. Specifically, our analysis suggests that k is sensitive to the ratio of coupling stiffness (kc) to internal damping (ci). A higher k value indicates a system where structural dissipation dominates over path connectivity, causing the asymmetry to vanish more rapidly as frequency increases. This mapping provides a physical basis for interpreting k not merely as a statistical fit, but as a descriptor of the drivetrain’s dynamic permeability.
The experimental invariance of k across different operational states (Table 7) validates the theoretical hypothesis that the attenuation of asymmetry is an inherent structural property. Mathematically, this confirms that the energy dissipation within the coupled drivetrain scales proportionally with the excitation frequency, satisfying the exponential decay law regardless of the external torque magnitude.
5.2. Extended frequency validation (50–100 Hz)
Measurements were extended to the 50–100 Hz frequency range, with experimental validation up to 100 Hz and model-assisted extrapolation for higher frequencies. In this regime, the asymmetry ratio Rij(ω) tends toward unity, indicating a progressive reduction in directional bias at higher frequencies.
This trend supports the hypothesis that directional asymmetry in coupled rotating systems is a frequency-dependent transient phenomenon, which diminishes as the system transitions toward distributed vibration modes.
The consistently high goodness-of-fit values (R2 > 0.99) across operating conditions indicate that the exponential formulation provides a robust representation of the observed energy transfer behavior, rather than being an artifact of a specific experimental configuration.
6. Conclusions
This study introduced and experimentally validated a directional dynamic transmission framework for coupled rotating systems. By defining defect-induced transmission coefficients and asymmetry ratios, the frequency-dependent propagation of vibration energy between drivetrain components was quantified under reciprocal fault conditions.
Across four mechanically distinct bidirectional transmission paths, the directional asymmetry ratio consistently exhibited monotonic exponential convergence toward unity with increasing excitation frequency. While the initial asymmetry magnitudes varied depending on local interaction characteristics, the convergence coefficients remained confined to a narrow interval, with an average value of approximately 0.066.
This limited dispersion suggests that the attenuation rate is largely insensitive to component location or fault type and is primarily influenced by the global dynamic structure of the coupled assembly. The results indicate that defect-induced vibration transmission exhibits pronounced directional characteristics in the low-frequency regime and progressively evolves toward a more reciprocal response at higher frequencies.
The proposed exponential representation provides a compact and experimentally supported description of this behavior, offering a system-level perspective on directional vibration propagation in rotating machinery. Overall, the findings extend conventional localized fault interpretation by demonstrating that defect-induced excitation evolves in a predictable manner from directional dominance to distributed dynamic interaction across frequency.
The results also show that the asymmetry ratio converges to unity at high frequencies. Around 100 Hz, the system response becomes practically symmetric for all investigated operating conditions. This indicates that the attenuation process reaches an asymptotic regime and that the selected frequency range is sufficient to capture the full evolution of the phenomenon. Consequently, the study provides a comprehensive experimental characterization of the frequency-dependent decay of directional transmission asymmetry.
Supplemental material
Supplemental material - Frequency-dependent attenuation of directional transmission asymmetry in coupled rotating systems
Supplemental material for Frequency-dependent attenuation of directional transmission asymmetry in coupled rotating systems by Ali İhsan Engür in Journal of Vibration and Control
Footnotes
Funding
The author received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
The data supporting the findings of this study are available from the corresponding author upon reasonable request.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.