
Abstract
In real-world industrial settings, bearing operation is influenced by varying operating conditions, resulting in vibration responses that exhibit significant multi-scale feature coupling characteristics. Moreover, reliable data for characterizing these responses remain scarce. Traditional methods lack the ability to adaptively integrate multi-scale information during feature modeling and fail to effectively incorporate physical constraints related to failure mechanisms, resulting in unstable feature representations and diagnostic results that lack physical consistency. To address these challenges, an unsupervised physics-informed domain-adversarial graph convolutional network is proposed for bearing fault diagnosis under varying operating conditions. Within this framework, a Kernel Selective Fusion Attention mechanism is introduced to selectively fuse the extracted multi-scale convolutional responses, thereby enhancing the stability and discriminability of graph features. Furthermore, a physical prior distribution is constructed based on the envelope power spectrum and fault characteristic frequencies, and the prior knowledge of fault mechanisms is incorporated into the model optimization process through a sample-level gating strategy and a delayed-start linear ramp-up weighting. The experimental results demonstrate that the proposed method outperforms the comparison methods in terms of fault diagnosis accuracy in the target domain, cross-domain feature alignment capability, and compound-fault recognition performance, thereby validating its effectiveness in unsupervised domain adaptation for diagnosis under varying operating conditions.
Keywords
1. Introduction
Rolling bearings are critical supporting components in rotating machinery. The health condition of rolling bearings directly affects equipment safety, reliability, and maintenance costs (Lei et al., 2020). In recent years, with the advancement of deep learning and transfer learning, intelligent fault diagnosis methods based on vibration signals have made significant progress in the identification of rolling bearing conditions (Tang et al., 2024; Tong et al., 2018; Zhang et al., 2023). However, in real-world industrial scenarios, constantly changing rotational speeds, loads, and environmental conditions can cause significant shifts in signal distributions, making it difficult for models trained under fixed operating conditions to generalize to new conditions (Lu et al., 2021; Wu et al., 2022; Zhong et al., 2024). Therefore, reliable cross-condition bearing fault diagnosis with few or no labels in the target domain remains a key challenge in intelligent fault diagnosis (X Li et al., 2020).
Changes in operating conditions can cause systematic shifts in the statistical distributions of vibration signals, the scales of time-frequency features, and the similarity relationships among samples (Xiao et al., 2025; ZHANG et al., 2023). Specifically, changes in load and rotational speed cause variations in the amplitude and modulation structure of the impact responses, which in turn result in shifts in the energy distributions of the frequency spectrum and envelope spectrum (Klausen et al., 2020; Mauricio et al., 2020; Randall and Antoni, 2011). Meanwhile, the coordinated changes in distribution and scale also alter the clustering patterns of the same fault class in the feature space, manifesting as stretching, compression, or local misalignment. As a result, the structural relationships among samples become unstable, thereby weakening similarity-based relational modeling and cross-domain alignment (Li et al., 2021a; Xiao et al., 2025). Consequently, conventional diagnostic models relying on fixed operating conditions or fully labeled data from the target domain are prone to distorted decision boundaries and degraded generalization during cross-domain transfer (Zhang et al., 2018; Zhang et al., 2023).
For bearing fault diagnosis, existing studies have extensively explored the end-to-end modeling capability of deep networks. Convolutional neural networks (CNNs) can directly learn discriminative features from raw vibration sequences, thereby reducing the reliance on manual feature engineering (Guo et al., 2016; Ince et al., 2016). Methods based on time-frequency representations further map non-stationary signals into the time-frequency domain and perform representation learning to capture local patterns (Liu et al., 2016). Although these methods can achieve satisfactory performance under fixed operating conditions or mild distribution shifts, they generally assume similar training and test distributions and therefore suffer from performance degradation under significant condition changes.
To reduce cross-domain distribution discrepancies, unsupervised domain adaptation (UDA) has emerged as an important solution for diagnosis with unlabeled data from the target domain. Existing UDA methods mainly include explicit alignment based on statistical distances and implicit alignment based on adversarial learning. Representative methods in the former category, such as domain adaptation networks and joint adaptation networks, typically align the feature distributions of the source and target domains using metrics such as maximum mean discrepancy, and further extend the alignment to multi-layer representations or joint distributions to enhance transfer performance (Long et al., 2017, 2019). Representative methods in the latter category, such as domain-adversarial neural networks and conditional domain adversarial networks, learn domain-invariant features through domain discriminators and gradient reversal mechanisms, while incorporating conditional adversarial strategies to alleviate class mismatch in multimodal transfer (Ganin et al., 2016; Long et al., 2018). However, these methods primarily focus on class-level and domain-level distribution alignment while neglecting the effective modeling of structural relationships among samples, which may lead to local mismatch and unstable decision boundaries under complex operating conditions.
Graph-based UDA methods have been introduced to exploit inter-sample relationships in cross-condition fault diagnosis. Li et al. proposed a domain-adversarial graph convolutional network that integrates convolutional representation learning, graph construction, graph convolutional propagation, and domain-adversarial learning into a unified framework, thereby improving unsupervised transfer diagnosis performance (Li et al., 2021a). Subsequent studies further explored structured subdomain alignment, meta-learning-based graph adaptation, and multi-source graph feature alignment to improve cross-domain diagnostic generalization (Ghorvei et al., 2023; Hu et al., 2024; Kavianpour et al., 2022; Liu et al., 2024). Although these methods explicitly exploit structural information, two challenges remain under varying operating conditions with severe distribution shifts. First, model optimization is still mainly driven by source domain supervision and data-driven alignment constraints, while explicit physical consistency constraints related to bearing fault mechanisms are insufficiently considered, limiting diagnostic reliability and interpretability. Second, graph construction relies heavily on convolutional node features, making similarity measurement and adjacency construction vulnerable to feature instability.
From the perspective of physical interpretability, bearing fault characteristic frequencies and their energy responses in the envelope spectrum provide mechanism-related prior evidence for diagnosis (Randall and Antoni, 2011; Shen et al., 2021). Existing studies have shown that integrating physically relevant representations, such as the envelope spectrum and wavelet responses, with deep networks can enhance the model’s sensitivity to fault mechanisms, thereby improving diagnostic interpretability and generalization performance (T Li et al., 2020). For example, Lu et al. introduced a physics-informed feature weighting strategy to assign higher weights to spectral features close to bearing fault characteristic frequencies, thereby improving sensitivity to fault-related components under speed variations (Lu et al., 2023). In addition, Ni et al. developed a physics-informed residual network by embedding a modal-property-dominant layer into the diagnostic model to enhance the physical consistency of learned representations (Ni et al., 2023). However, in scenarios where the target domain is unlabeled, stable and controllable integration of mechanism-related information remains challenging, especially because noisy physical priors may induce negative transfer when they are optimized jointly with domain-adversarial learning and structural alignment.
To address the above challenges in unsupervised transfer diagnosis under varying operating conditions, an unsupervised physics-informed domain-adversarial graph convolutional network with multi-scale selective feature enhancement and physical prior consistency constraint, termed PI-KSFA-DAGCN, is proposed. Specifically, a Kernel Selective Fusion Attention (KSFA) mechanism is introduced between convolutional feature extraction and the graph generation layer. By selectively fusing multi-scale candidate responses, it enhances the stability and discriminability of the features used for graph construction, thereby stabilizing similarity measurement and adjacency relationships among samples and improving the robustness of graph construction and relational modeling. Meanwhile, by incorporating the mechanisms reflected by bearing fault characteristic frequencies, a sample-level physical prior distribution is constructed from fault characteristic frequencies and the energy responses within their harmonic neighborhoods in the envelope power spectrum. With a gating strategy and a delayed-start linear ramp-up weighting strategy, the physical prior consistency constraint incorporates mechanism knowledge into classifier optimization, thereby alleviating semantic mismatch in unlabeled target domains and enhancing the physical interpretability of the decision process. Extensive cross-condition transfer experiments conducted on the HUST bearing dataset demonstrate that the proposed method achieves competitive cross-domain diagnostic performance.
The main contributions are summarized as follows. (1) An unsupervised physics-informed domain-adversarial graph convolutional network with multi-scale selective feature enhancement and physical prior consistency constraint is proposed and successfully applied to cross-domain bearing fault diagnosis. (2) A sample-level physical prior consistency constraint is proposed, where fault characteristic frequencies and the energy responses within their harmonic neighborhoods are mapped to a class-level prior distribution. Through a sample-level gating strategy and a delayed-start linear ramp-up weighting, mechanism knowledge is robustly incorporated into model optimization in coordination with domain-adversarial training. (3) A Kernel Selective Fusion Attention mechanism is designed to suppress feature drift through multi-scale selective fusion and improve the stability and discriminability of features used for graph construction, thereby enhancing the robustness of graph generation and structural modeling.
The remainder is organized as follows. Section two reviews the related work. Section three presents the overall framework of PI-KSFA-DAGCN and the design of its key modules. Section four provides the experimental settings, comparative results, ablation analyses, computational cost analysis, and further discussion on practical applicability. Section five concludes the study and outlines possible directions for future research.
2. Related work
2.1. Unsupervised domain adaptation
To address the degradation of cross-domain diagnostic performance caused by distribution shifts under varying operating conditions, unsupervised domain adaptation (UDA) aimed to learn transferable discriminative representations under the setting where labeled data from the source domain and unlabeled data from the target domain were available (Ganin et al., 2016; Long et al., 2017, 2018, 2019; Sun and Saenko, 2016). Existing methods could be generally categorized into adversarial approaches, discrepancy-based approaches, and methods that incorporated conditional constraints, self-training, and entropy regularization. Representative adversarial approaches included DANN, which learned domain-invariant features through a domain discriminator and gradient reversal to reduce domain discrepancy (Ganin et al., 2016). CDAN further introduced classification prediction information for conditional alignment, thereby alleviating class confusion caused by feature-level adversarial learning and improving multimodal transfer capability (Long et al., 2018). Discrepancy-based approaches achieved alignment by explicitly matching statistical distributions. DAN aligned marginal distributions using maximum mean discrepancy (Long et al., 2019). JAN aligned multi-layer joint distributions to enhance semantic transfer (Long et al., 2017). Deep CORAL aligned second-order statistics to mitigate domain shift (Sun and Saenko, 2016). Overall, these methods mainly focused on the optimization of global distributions and prediction confidence, but remained limited in their ability to stably characterize the variations in inter-sample similarity relationships and intra-class structural patterns under varying operating conditions. Consequently, their transfer performance remained constrained when structural misalignment was pronounced. Figure 1 further illustrates the three types of key information involved in UDA, namely class-discriminative information, domain-alignment information, and structural information among samples. Existing UDA methods mainly concentrated on the first two types of information, whereas explicit modeling of structural relationships among samples remained relatively insufficient, which in turn provided the motivation for the subsequent development of graph-based domain adaptation methods. Three types of transferable information in UDA.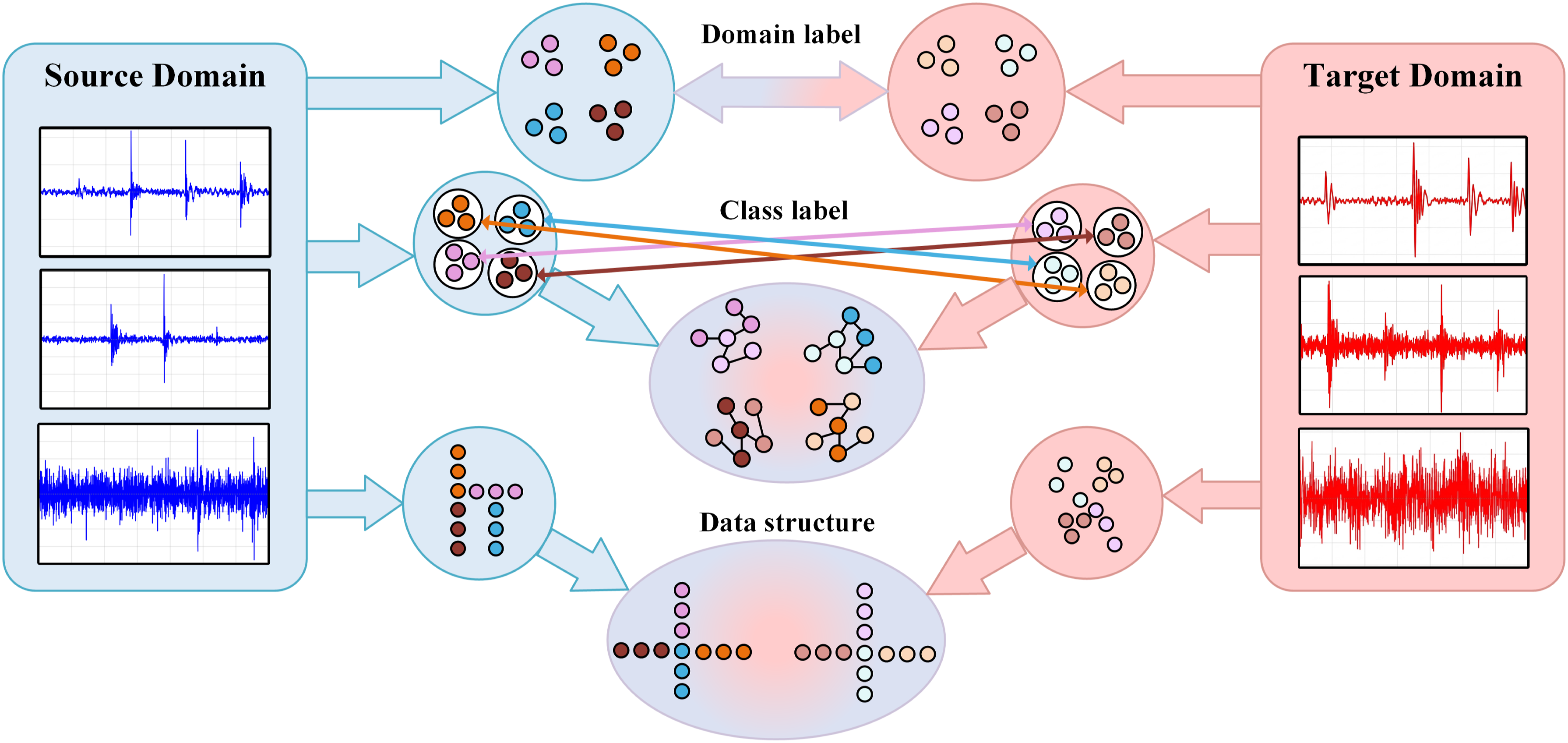
2.2. Graph convolutional networks
To characterize structural information among samples under varying operating conditions, graph convolutional networks (GCNs) (Kipf and Welling, 2016; Wu et al., 2021) unified convolutional feature learning, graph construction, and graph convolutional propagation within a single modeling framework. By explicitly modeling topological relationships among samples while facilitating feature distribution alignment, these methods improved the robustness of cross-condition transfer diagnosis (Wang et al., 2021; Yu et al., 2023). Such frameworks were typically organized into three stages: feature extraction, relational graph construction, and structural propagation (Wen et al., 2018). Compared with conventional UDA methods, GCNs were able to further exploit structural information among samples and, to some extent, alleviate the degradation in diagnostic performance caused by insufficient structural modeling. Although GCN-based domain adaptation methods provided a new modeling perspective for cross-domain fault diagnosis, they still exhibited notable limitations in unsupervised scenarios. On the one hand, model optimization mainly relied on data-driven alignment constraints and lacked explicit modeling and prior guidance with respect to fault-related physical mechanisms, thereby making the target domain more susceptible to class-level semantic shift, local alignment distortion, and unstable decision boundaries (X Li et al., 2020; Jiang et al., 2025). On the other hand, graph structure construction depended heavily on node representations generated by convolutional networks. Under varying operating conditions, such features were relatively sensitive to scale perturbations and local pattern shifts, which reduced the reliability of similarity measurement and destabilized adjacency relationships, thereby weakening graph convolutional propagation and structural alignment.
3. Methodology
3.1. Overview
The overall framework of the model is shown in Figure 2. The proposed model is built upon a domain-adversarial graph convolutional network. To address the issues of scale fluctuations in convolutional features and local pattern drift caused by varying operating conditions, KSFA is introduced between the final convolutional feature maps of the CNN backbone and the fully connected embedding layer. This mechanism extracts candidate representations through multi-scale deep convolutional branches and achieves adaptive fusion by combining temporal and channel selection, thereby obtaining more robust node embeddings and improving the stability of inter-sample similarity measurement and adjacency relationship learning. Furthermore, a sample-level physical prior distribution is constructed from the fault characteristic frequencies in the envelope power spectrum and the energy responses within their harmonic neighborhoods, and a physical prior consistency constraint is imposed between this distribution and the model prediction in the class-probability space. With a sample-level gating strategy and delayed-start linear ramp-up weighting, the physical prior consistency constraint further injects fault mechanism prior knowledge into classifier optimization in a robust manner. Ultimately, the model is trained end to end under the joint supervision of the source domain classification loss, domain alignment loss, structural alignment loss, and physical prior consistency loss, thereby collaboratively enhancing cross-condition diagnostic discrimination, structural modeling stability, and physical interpretability. Overall framework of PI-KSFA-DAGCN.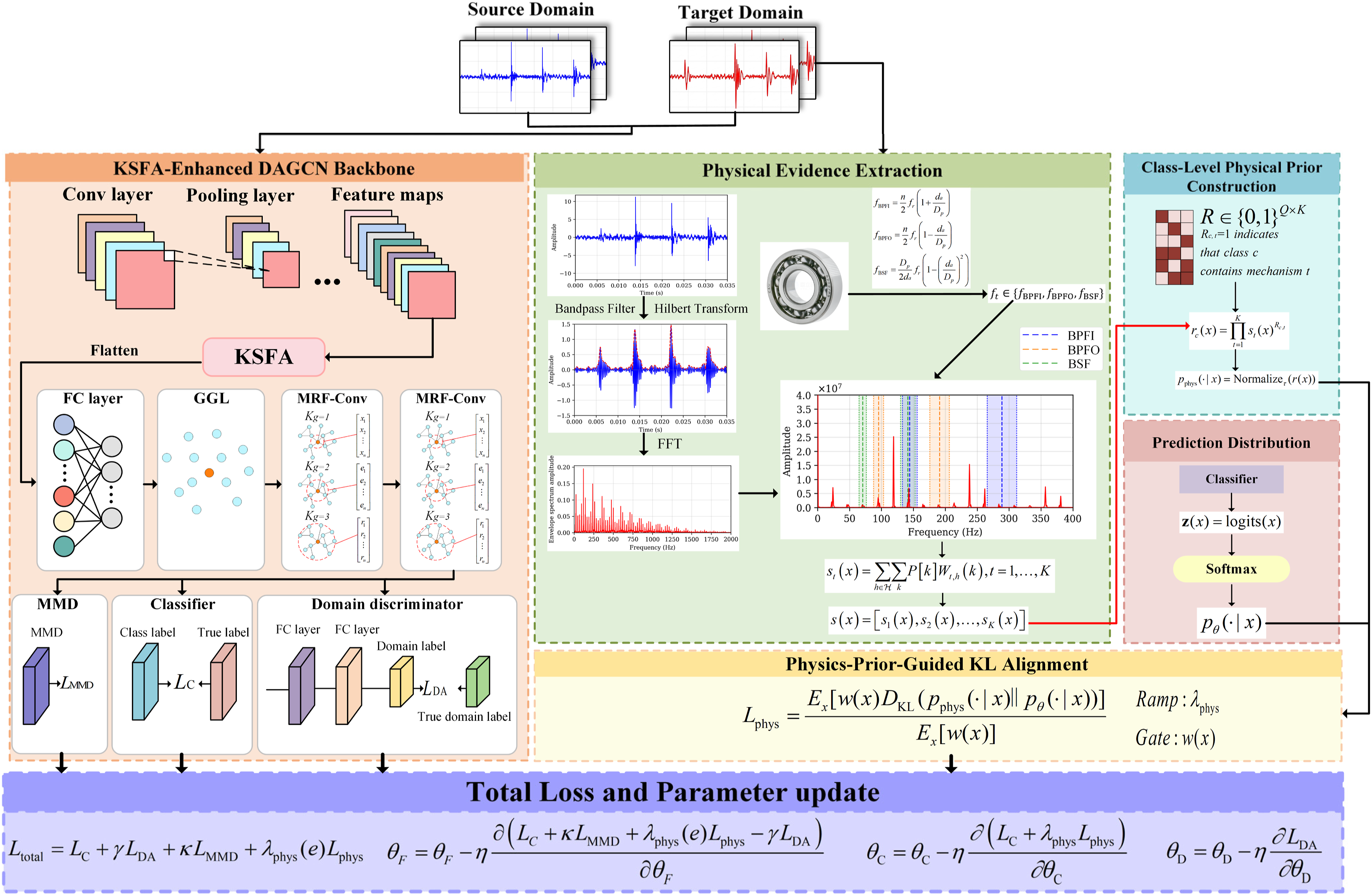
The labeled dataset in the source domain is defined as
3.2. Kernel selective fusion attention
In the constructed domain-adversarial graph convolutional network, the features extracted by the convolutional backbone are used for subsequent graph generation and structural propagation. When variations in operating conditions induce feature-scale fluctuations or local pattern drift, inter-sample similarity estimation can be disturbed, thereby leading to unstable graph construction and weakened graph convolutional propagation and subsequent cross-domain alignment. To address this issue, inspired by the selective fusion strategy in (Xu et al., 2025), Kernel Selective Fusion Attention (KSFA), tailored for one-dimensional temporal feature enhancement, is introduced between the final convolutional feature maps of the CNN backbone and the fully connected embedding layer to selectively enhance multi-scale convolutional responses, as illustrated in Figure 3. Given an input sample The proposed Kernel Selective Fusion Attention (KSFA). DwConv represents depthwise convolution, Avg and Max represent channel-wise average pooling and max pooling, respectively, and GAP means temporal global average pooling.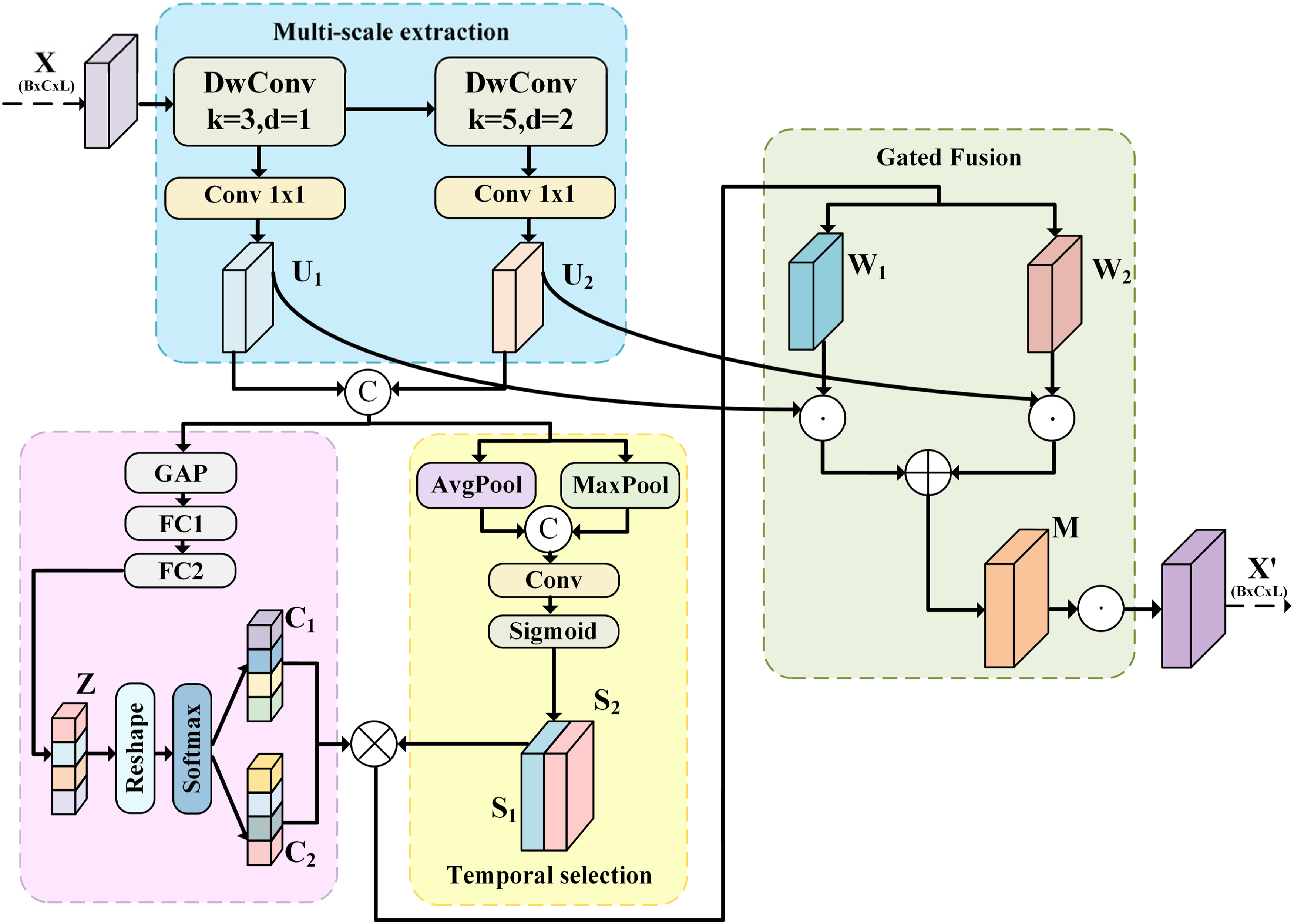
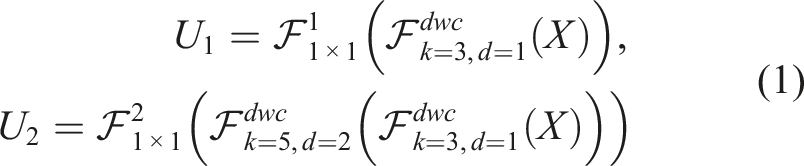
Let the input feature maps be


The corresponding branch-wise temporal selection masks are then obtained through sigmoid activation,

To enhance the modeling of channel dependencies while controlling parameter complexity, a bottleneck channel selection structure is implemented using two fully connected layers. Specifically, the channel descriptor is first compressed into a compact representation and then projected back to the original channel space to generate the channel response




The attention gating mask is then obtained by applying the sigmoid function


After flattening and fully connected projection of the output feature maps
3.3. Graph generation and structural propagation
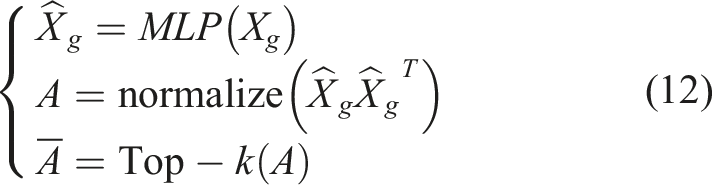
Taking the sample-level embedding Process of the graph generation layer (GGL).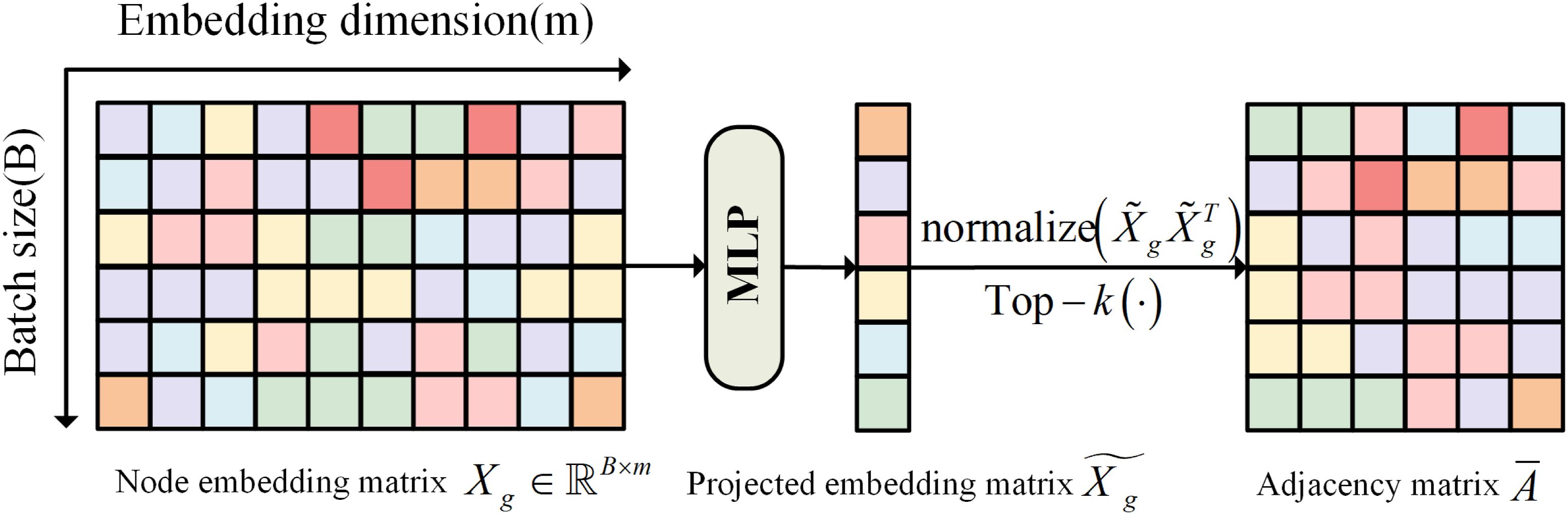
On the constructed instance graph, structural propagation is performed using the multi-receptive-field graph convolutional network (MRF-GCN) (Li et al., 2021b), so that neighborhood dependencies at different scales can be modeled in parallel and the structural information among samples can be embedded into node representations. The multi-receptive-field graph convolution operation is defined as



3.4. Physical prior consistency constraint
The gradient updates of DAGCN are primarily governed by data-driven mechanisms, including source domain supervision as well as distributional and structural alignment, while explicit physical consistency constraints associated with bearing fault mechanisms remain insufficiently incorporated. To address this issue, a physical prior consistency constraint based on sample-level physical priors is introduced. Specifically, by mining the energy responses of fault characteristic frequencies and their harmonic neighborhoods in the envelope power spectrum, sample-level physical prior evidence is constructed and further mapped into a class-level physical prior distribution to regularize classifier predictions. Subsequently, in the class-probability space of the classifier output, the physical prior distribution is aligned with the model-predicted distribution through the proposed physical prior consistency constraint. Meanwhile, a sample-level gating strategy and delayed-start linear ramp-up weighting are combined to inject fault-mechanism knowledge into the classifier training process in a stable and controllable manner.
For each unlabeled sample from the target domain, the raw vibration signal is first band-pass filtered within a preset resonance band to enhance components related to impulsive modulation. The Hilbert transform is then applied to extract the envelope signal, and the one-sided envelope power spectrum is obtained through the fast Fourier transform. The envelope spectrum is given by



In general, let




A narrow-band analysis window is further constructed using the proportional bandwidth

A schematic illustration of the neighborhood windows around the fault characteristic frequencies and their harmonics is shown in Figure 5. Let the hard window be defined as Illustration of fault characteristic frequencies and their harmonic neighborhoods in the envelope power spectrum. The dashed bands denote the narrowband windows centered at the harmonic frequencies of BPFI, BPFO, and BSF.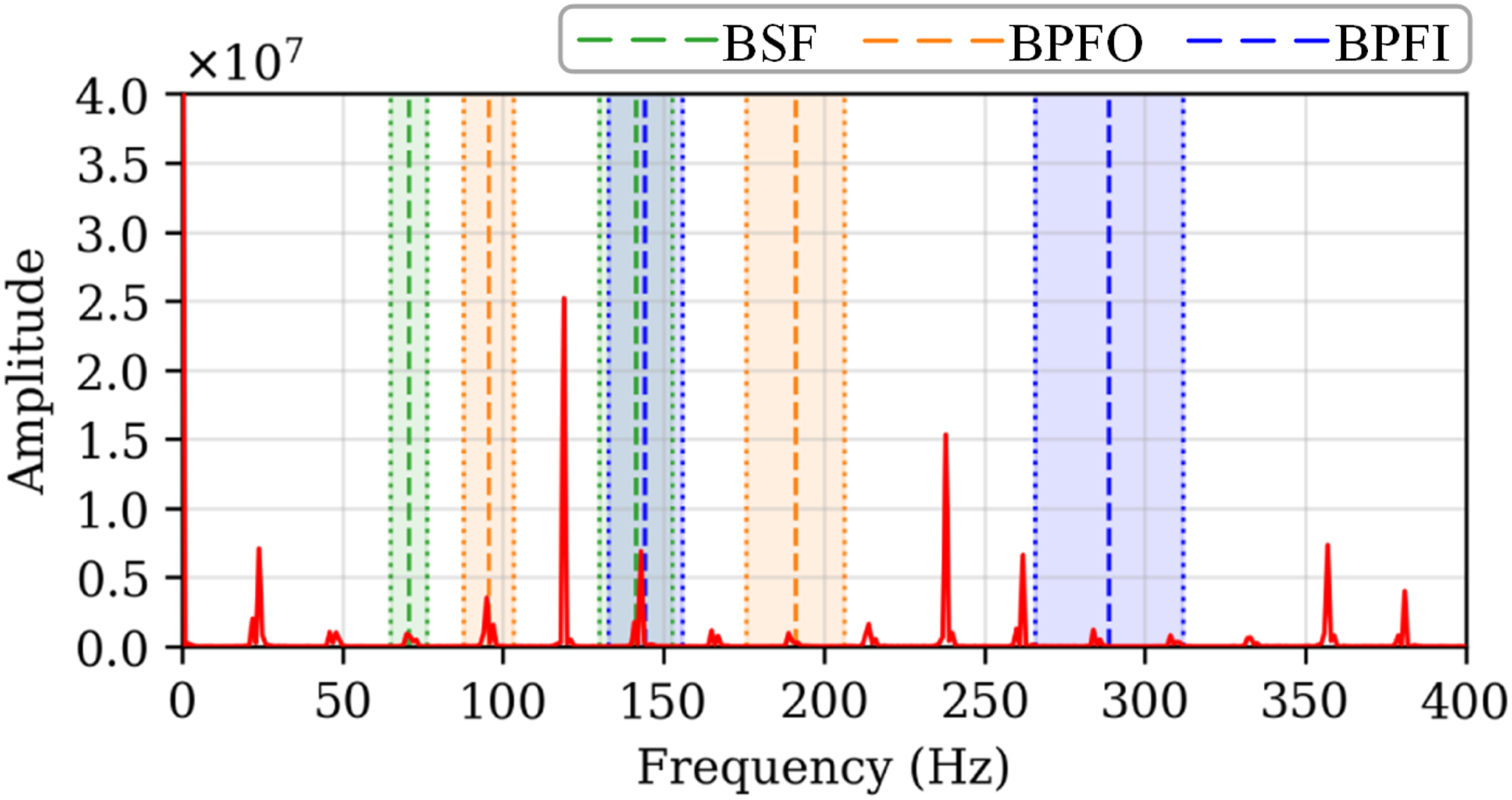



To map the mechanism-level physical evidence into class-level physical priors, an indicator matrix

This definition accommodates both single-fault and compound-fault classes in a unified form. When a class involves only one mechanism, its score reduces to the evidence associated with that individual mechanism. When a class is composed of multiple fundamental mechanisms, its score is determined by the product of the corresponding mechanism evidence, thereby emphasizing the joint response when multiple mechanisms are simultaneously significant. In the bearing fault diagnosis task considered here, the set of fundamental mechanisms consists of inner race fault, outer race fault, and ball fault. Therefore,



Considering that not all samples from the target domain provide sufficiently reliable physical evidence, a gating mechanism is further introduced so that the physical prior consistency constraint is imposed only on samples with sufficiently reliable physical evidence. Let
First, confidence gating is used to determine whether the constructed physical prior distribution has a sufficiently dominant class response. The confidence score is defined as

The confidence-gating indicator is given by

Second, energy gating is used to check whether the harmonic neighborhoods contain sufficient mechanism-related spectral energy. To avoid repeated counting caused by overlapping harmonic neighborhoods, a union window over all mechanism-related harmonic bands is first defined, and the mechanism-related energy is computed as
The total envelope-spectrum energy within the analyzed frequency band is given by



Third, frequency-validity gating is used to ensure that the fault characteristic frequencies used for physical prior construction are physically valid. Specifically,

The final sample-level gating weight is obtained by combining the three indicators


The hyperparameters associated with the physical prior were selected according to bearing signal-processing knowledge and the sampling setting of the HUST bearing dataset, and were kept fixed for all transfer tasks. The delayed-start ramp-up strategy was configured with
Overall, the proposed physical prior consistency constraint based on sample-level physical priors does not directly impose a fixed frequency template on the model. Instead, through sample-level mechanism evidence extraction, class-level prior mapping, gated consistency regularization, and progressive weight scheduling, bearing fault mechanism knowledge is incorporated into the unsupervised transfer diagnosis process in a data-dependent and sample-adaptive manner. This design not only preserves the modeling capability of data-driven methods for complex operating condition distributions but also provides additional mechanism-based constraints for unlabeled samples from the target domain, thereby enhancing decision stability and physical plausibility in diagnosis under varying operating conditions.
3.5. Overall loss and training strategy
Following DAGCN, the source domain classification loss, domain alignment loss, and structural alignment loss are denoted by

The domain alignment loss is defined as

The structural alignment loss is defined as





By optimizing the above overall objective function, the network parameters are jointly updated, enabling the model to learn feature representations with discriminability, domain invariance, and structural robustness, thereby improving the diagnostic performance on unlabeled samples from the target domain. The overall training procedure of PI-KSFA-DAGCN is summarized in Algorithm 1.
4. Case experiment
4.1. Dataset description and preprocessing
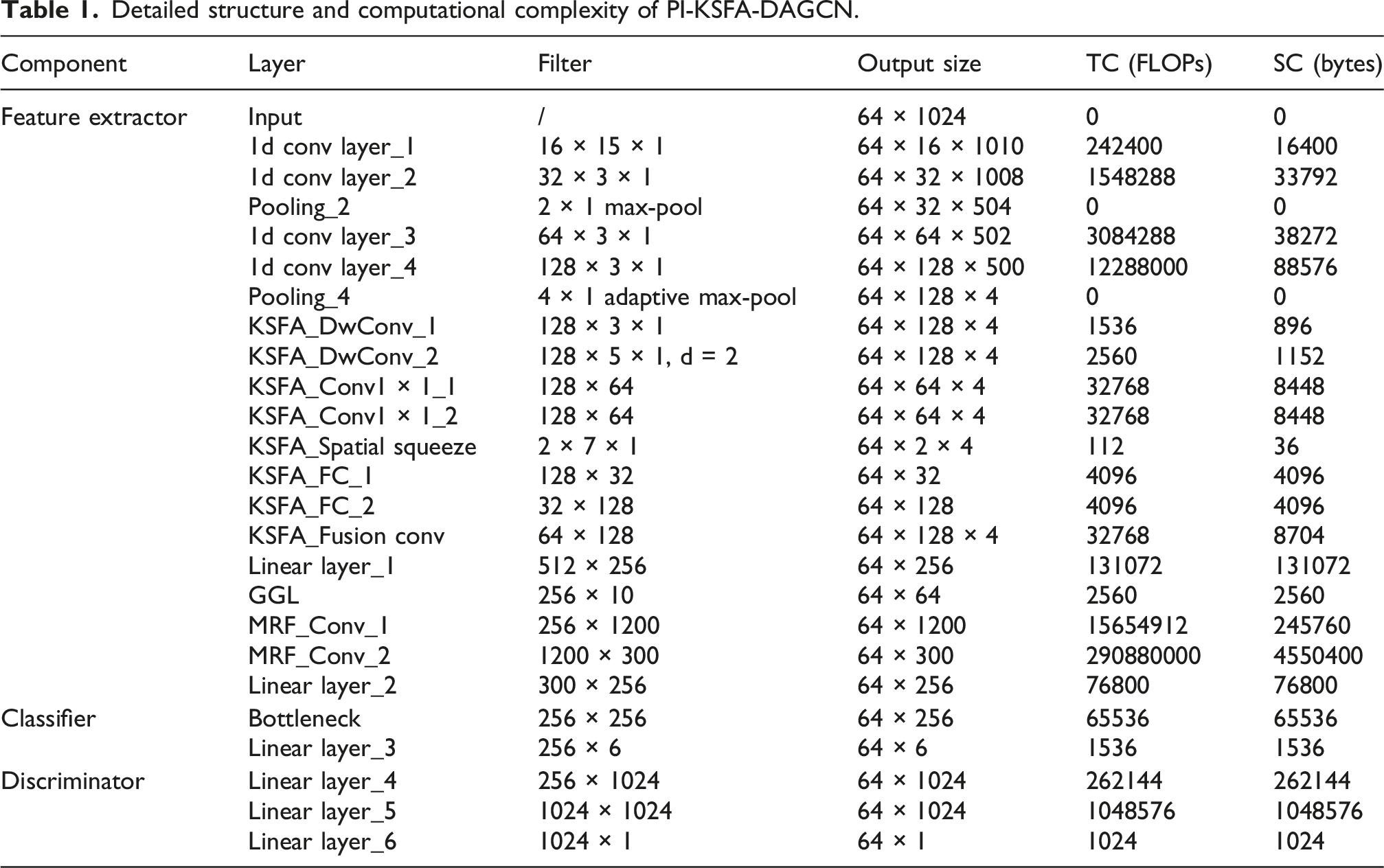
The proposed method is validated on the HUST bearing dataset, that is, A Practical Dataset for Ball Bearing Fault Diagnosis (Thuan and Hong, 2023), whose experimental platform and fault-type illustrations are shown in Figure 6. This dataset contains six fault classes composed of inner race fault, outer race fault, ball fault, and their pairwise combinations. Three load conditions, namely 0 W, 200 W, and 400 W, are considered to characterize the bearing vibration behavior under different operating conditions. The raw vibration signals are sampled at 51.2 kHz, and the duration of each raw vibration signal is 10 s. The raw vibration signals are first normalized using the Z-score standardization method. The signals are then segmented by a sliding window with both window length and step size set to 1024, such that no overlap exists between adjacent samples. Within each domain, a unified upper limit is imposed on the number of samples in each fault class, with at most 1000 segments retained per class. Subsequently, stratified sampling is performed according to fault class within each domain, and the samples are divided into training and test sets at a ratio of 8:2, yielding 800 training samples and 200 test samples per class. The three operating conditions are indexed by 0, 1, and 2, corresponding to 0 W, 200 W, and 400 W, respectively. Accordingly, six cross-condition transfer tasks are constructed. For brevity, Experimental platform of the HUST bearing dataset and the six fault types considered in this study, including inner race fault, outer race fault, ball fault, and their pairwise compound faults. Detailed structure and computational complexity of PI-KSFA-DAGCN.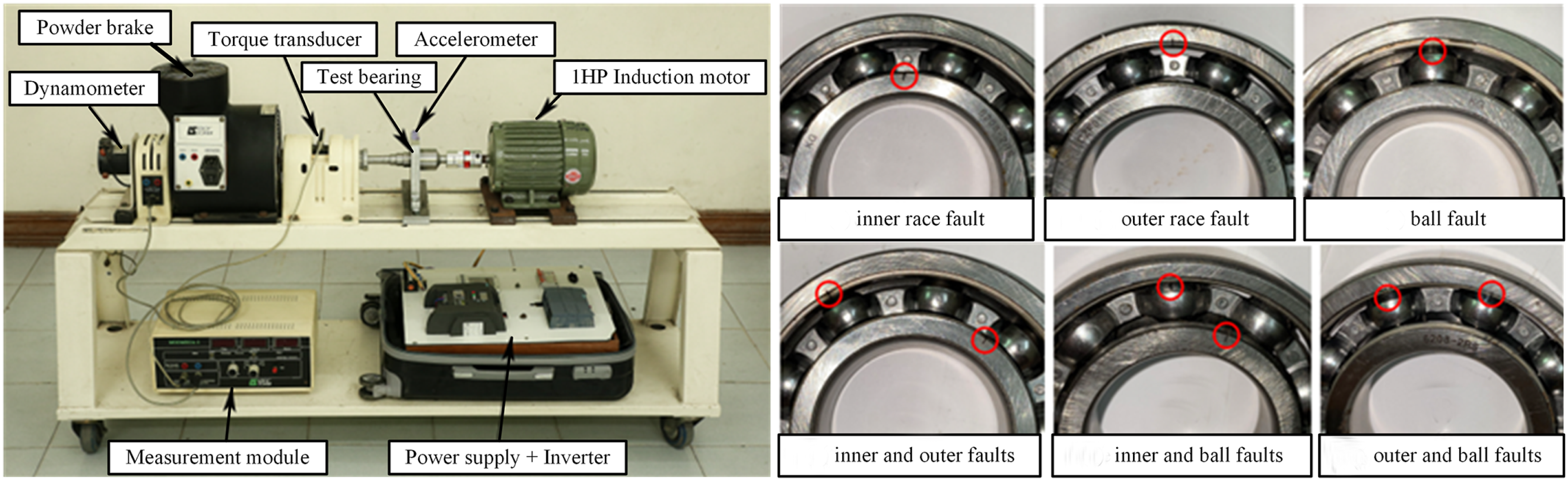
4.2. Training visualization
Each model is trained for 300 epochs, with the first 50 epochs used for pretraining, during which no samples from the target domain are involved. The initial learning rate is set to 0.001 and is decayed by a factor of 0.1 at the 150th and 250th epochs, respectively. The two balancing coefficients, Training Loss Curves on transfer task 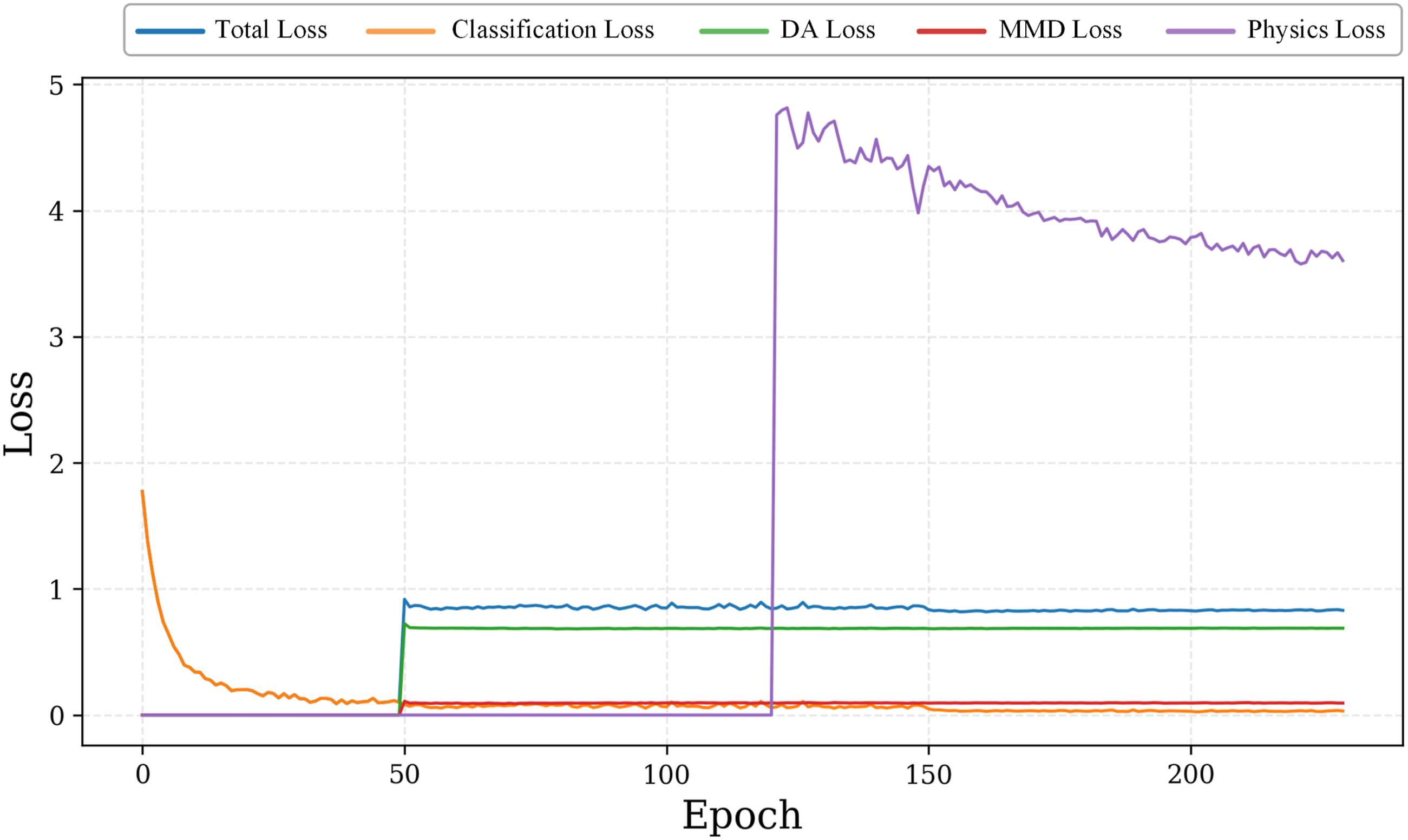
4.3. Fault diagnosis analysis
To intuitively evaluate the feature representation capability of the proposed method, t-SNE is employed to visualize the high-dimensional features extracted from the final layer of the feature extractor after dimensionality reduction. Taking the transfer task t-SNE visualization of the feature distributions learned by DAGCN and PI-KSFA-DAGCN on transfer task 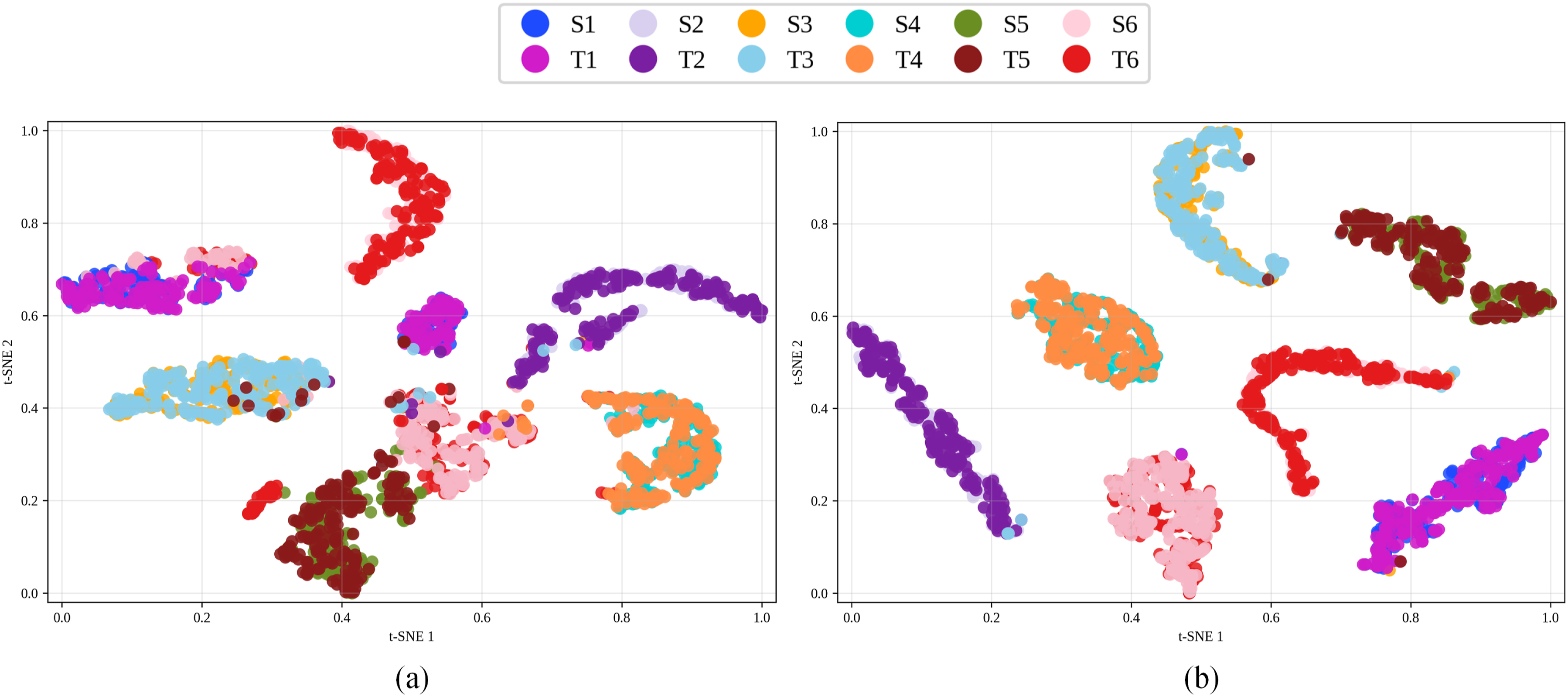
To further analyze the diagnostic performance across fault classes, the confusion matrices of the backbone DAGCN and PI-KSFA-DAGCN on the target domain are presented in Figure 9. The results show that, compared with the baseline model, PI-KSFA-DAGCN improves the recognition accuracy for four fault classes, namely B, corresponding to ball fault; IO, corresponding to the combination of inner race fault and outer race fault; IB, corresponding to the combination of inner race fault and ball fault; and OB, corresponding to the combination of outer race fault and ball fault, by 1%, 1%, 7%, and 26%, respectively. These results further demonstrate that the proposed method provides superior discriminative capability in complex fault patterns, particularly for the identification of compound faults. Confusion matrices of DAGCN and PI-KSFA-DAGCN on the target domain.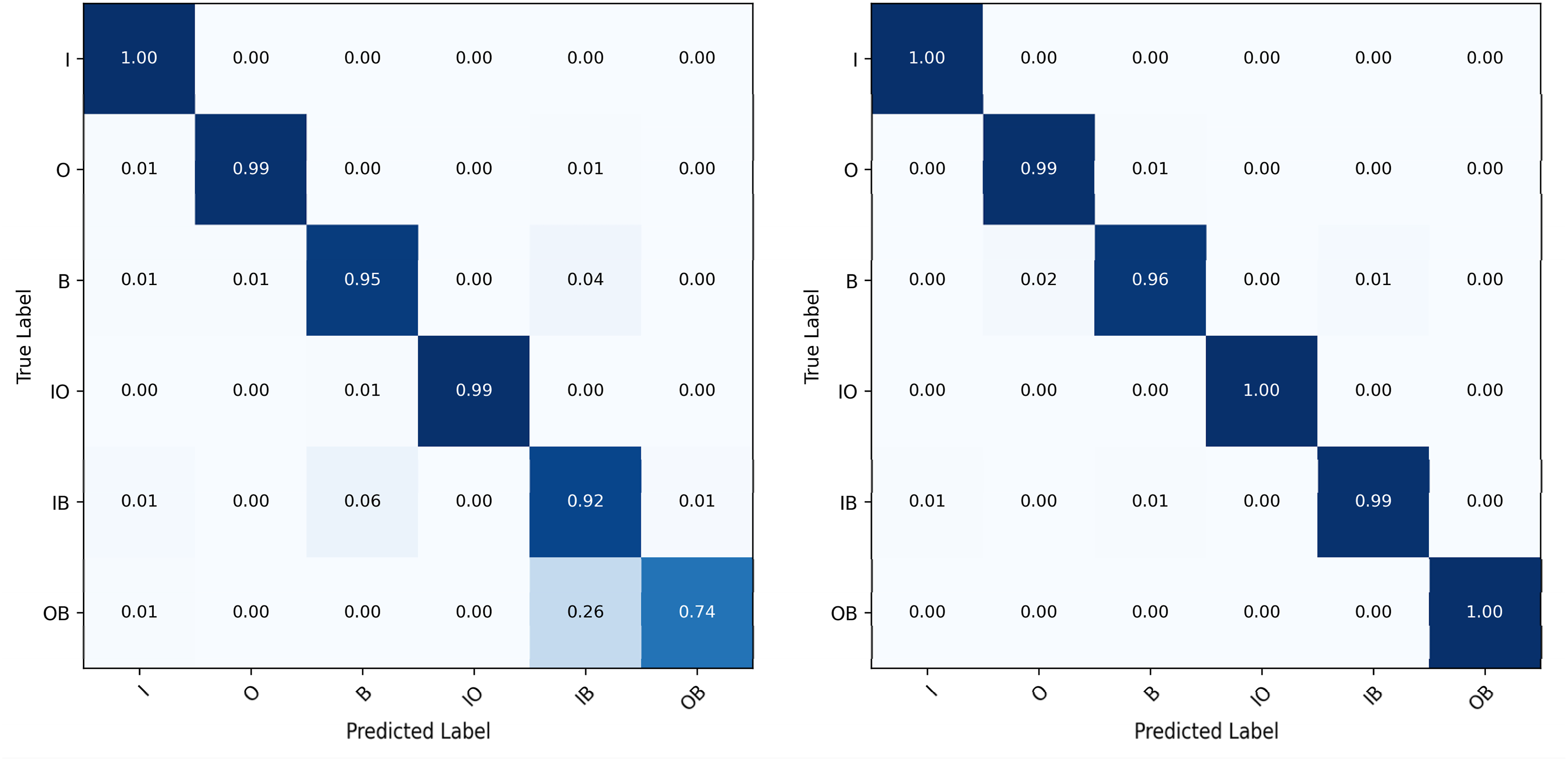
4.4. Comparison with state-of-the-art methods
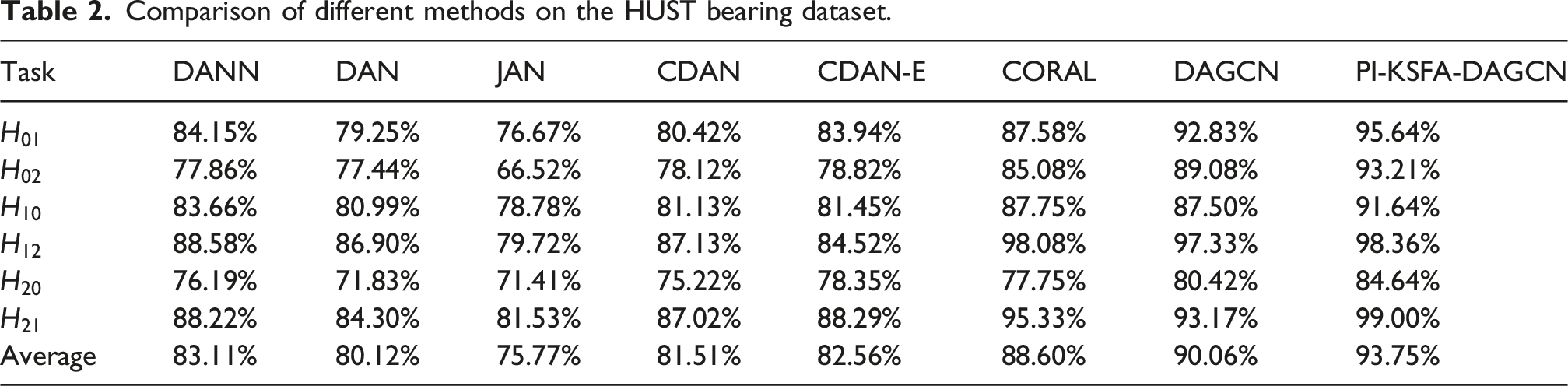
Comparison of different methods on the HUST bearing dataset.
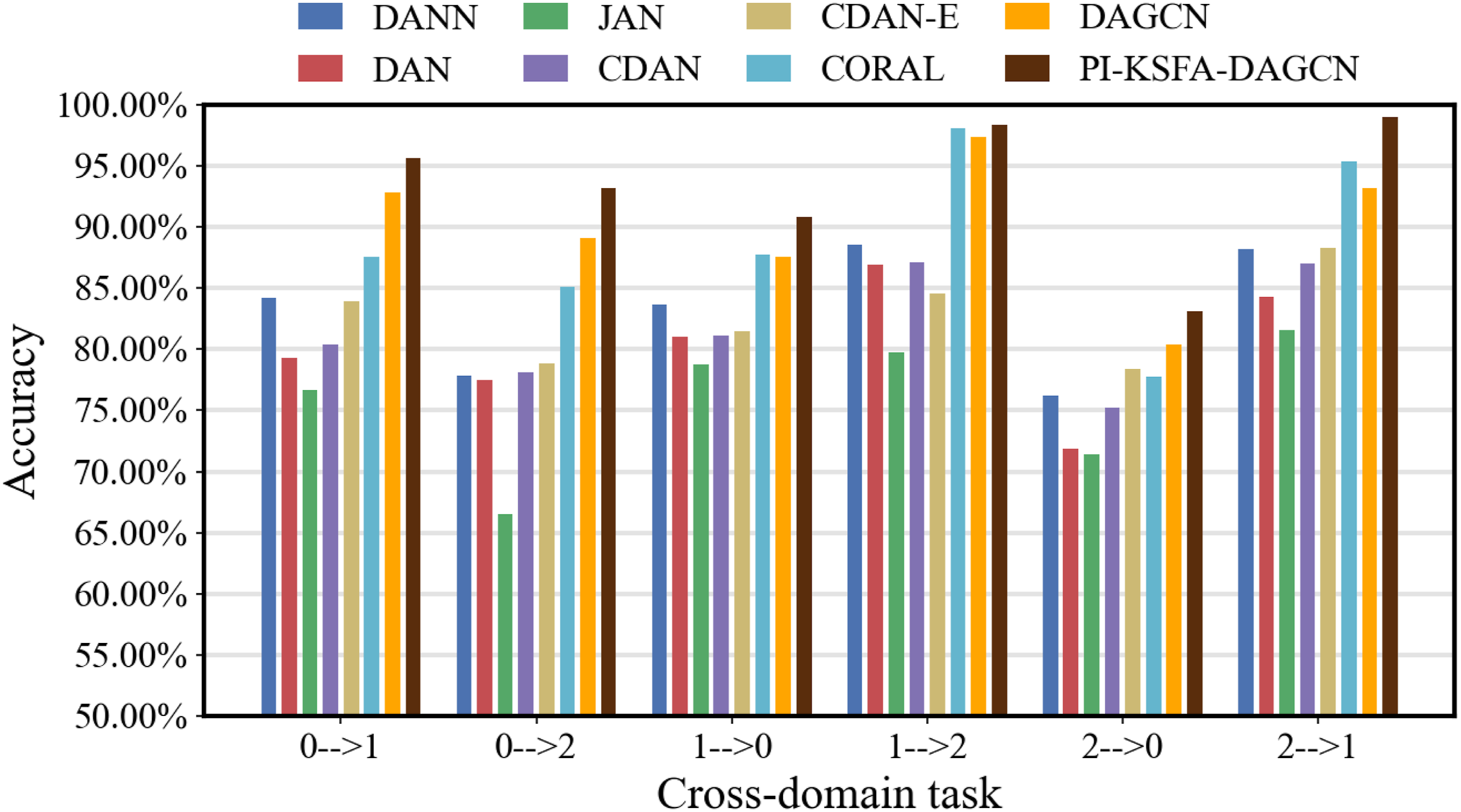
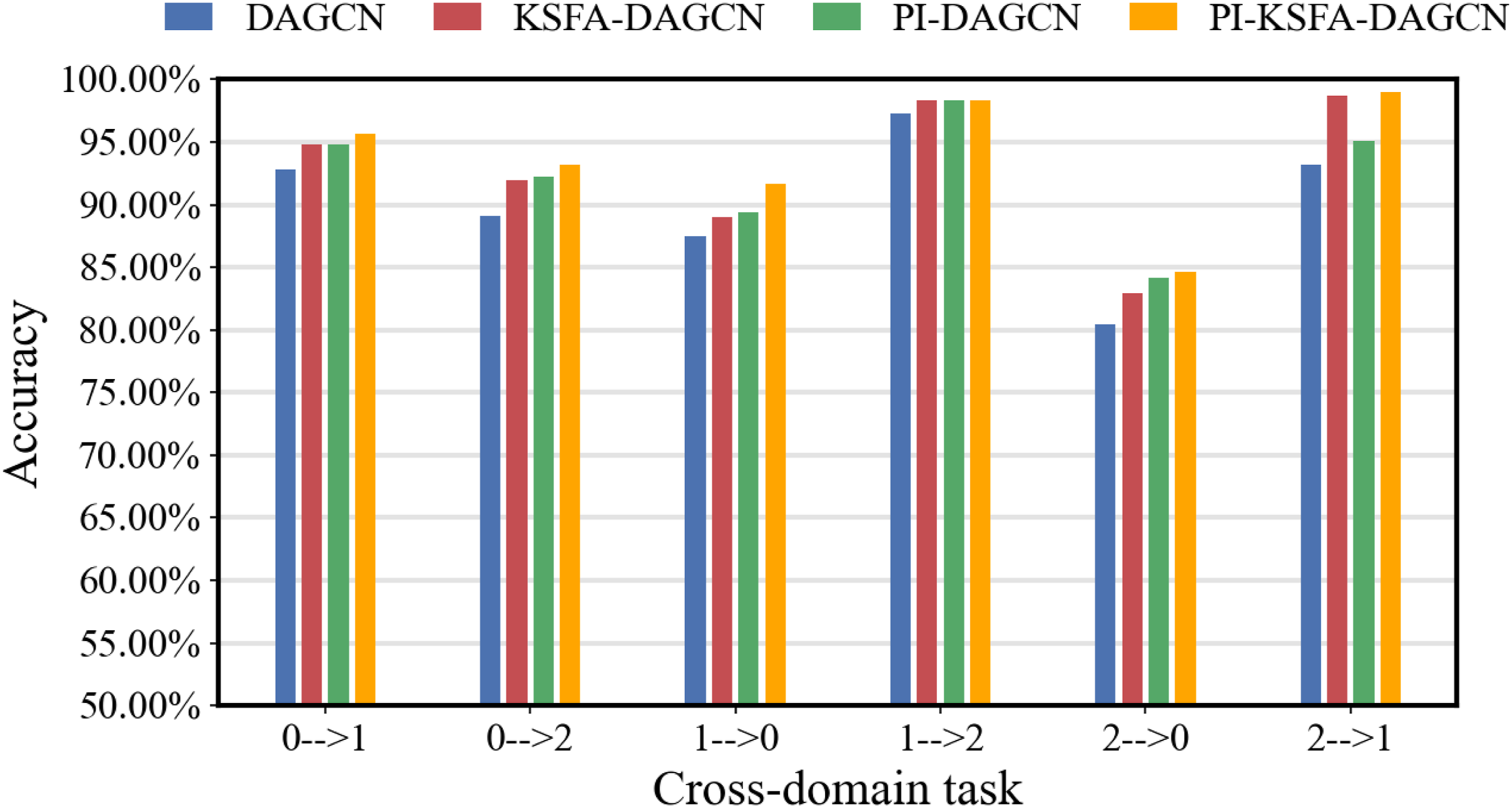
Comparison of different methods on six cross-condition transfer tasks of the HUST bearing dataset.
From the results of individual transfer tasks, PI-KSFA-DAGCN improves upon the baseline DAGCN by 2.81%, 4.13%, 4.14%, 1.03%, 4.22%, and 5.83% on the six transfer tasks, respectively, indicating that the proposed improvement is not only effective on average but also exhibits favorable stability and consistency across different transfer directions. In particular, more pronounced gains are observed on tasks such as
4.5. Ablation study
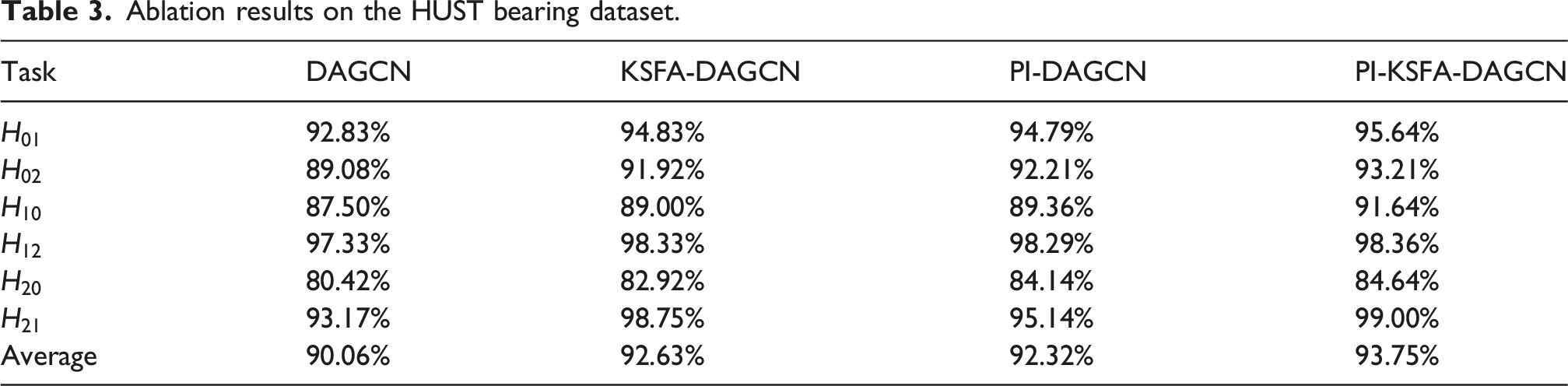
Ablation results on the HUST bearing dataset.
Ablation results on six cross-condition transfer tasks of the HUST bearing dataset.
4.6. Computational cost analysis
Computational cost comparison of different model variants.

The average training time per epoch is calculated over epochs 120-300 on six cross-condition transfer tasks, during which the physical prior constraint is activated for PI-DAGCN and PI-KSFA-DAGCN. Under the same hardware and training settings, DAGCN, PI-DAGCN, KSFA-DAGCN, and PI-KSFA-DAGCN require 5.65 s, 7.18 s, 7.12 s, and 7.20 s per epoch on average, respectively. These results show that the proposed modules introduce only moderate training-time overhead.
Specifically, the KSFA module consists mainly of depthwise convolution, 1 × 1 convolution, and lightweight channel-temporal selection operations, resulting in limited additional parameter and computational costs. The graph construction process is based on mini-batch sample similarity calculation and Top-k sparsification, so its computational scale is controlled by the mini-batch size. The physical prior calculation, including band-pass filtering, Hilbert transform, FFT, and harmonic-neighborhood energy accumulation, is only used during training to construct the physical consistency constraint. Therefore, the proposed method improves cross-condition diagnostic performance and physical interpretability with limited additional overhead. The physical prior constraint does not introduce any additional inference branch, and the only increase in inference-stage model size comes from the lightweight KSFA module, which adds merely 0.0344 M trainable parameters.
5. Conclusion
To address distribution shift, graph construction instability, and insufficient physical constraints in bearing fault diagnosis under varying operating conditions, an unsupervised physics-informed domain-adversarial graph convolutional network with multi-scale selective feature enhancement and a physical prior consistency constraint is proposed. Built upon the DAGCN backbone, the proposed method incorporates Kernel Selective Fusion Attention to enhance the stability and discriminability of graph features. Meanwhile, a physical prior is constructed from fault characteristic frequencies in the envelope spectrum and the energy within their harmonic neighborhoods, and mechanism knowledge is integrated into the model optimization process through a sample-level gating strategy and a physical prior consistency constraint with delayed-start and linearly ramped weighting. Experimental results demonstrate that the proposed method achieves consistent improvements across multiple cross-condition transfer tasks. It not only improves the fault recognition accuracy on the target domain but also enhances inter-class separability in the feature space and cross-domain alignment capability, indicating that the collaborative modeling of physical prior and domain adaptation can effectively improve intelligent diagnostic performance under complex operating conditions. Future work will focus on few-shot target domain adaptation, learnable physical prior modeling, and online cross-device deployment.
Footnotes
Acknowledgement
The authors gratefully acknowledge the financial supported by The National Key Research and Development Program of China (2024YFD2100203) and Natural Science Foundation of Guangdong Province (2023A1515011723).
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China (2024YFD2100203) and Natural Science Foundation of Guangdong Province (2023A1515011723).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.