Polyvinyl chloride (PVC) gel is an electroactive polymer material with low cost, large deformability, light weight and fatigue resistance. It has two-way electromechanical coupling performance and has important application prospects in intelligent sensing and flexible driving. The material is often prepared into a conical structure for driving soft robots, flexible pumps, etc. However, limited research exists on the theoretical modeling of PVC gel conical structures and their nonlinear deformation behavior under dynamic loads, hindering broader applications. This study addressed this gap by developing an electromechanical coupling model for the spatial conical structure actuator and establishing its nonlinear vibration control equation using the Euler-Lagrange framework. The Helmholtz free energy was used to describe the system energy change of the conical PVC gel actuator. The Gent constitutive model of the hyperelastic material was used to characterize the elastic strain of the PVC gel material, and the nonlinear dynamic behavior of the PVC gel cone structure was analyzed. The damping ratio effect, tensile limit factor, and external factors, such as pre-stretching mechanical external force, external periodic sinusoidal voltage, and spring stiffness coefficient, were considered. The critical threshold for the transition from steady-state to chaotic vibration of PVC gel cone-shaped structure actuator under different parameters was explored. The threshold was qualitatively and quantitatively defined and analyzed by bifurcation diagram and Lyapunov exponent. This study provides a theoretical basis for the further application of PVC gel conical structure actuators.
Polyvinyl chloride (PVC) gel is an electroactive polymer with low cost, large deformability, light weight, and fatigue resistance (Irfan et al., 2023; Tang et al., 2021; Wu et al., 2024). Numerous studies have investigated its properties from various perspectives, including composition and composites (Zhang et al., 2023), mechanical and damage modeling (Neubauer et al., 2022), and electromechanical responses (Wang et al., 2023; Yoon and Bae, 2024). In addition, it exhibits bidirectional electromechanical coupling, offering significant application prospects in intelligent sensing (e.g., Huang et al., 2023) and flexible actuation (e.g., Li et al., 2021; Motohashi et al., 2022). These applications extend to fields including microfluidics, wearable devices, and energy harvesting (Neubauer et al., 2022; Siekierka et al., 2023). The material’s lightweight and flexible nature makes it suitable for various applications, including bionic gecko adhesive grippers (He et al., 2022), bionic fish tails (Dong et al., 2022), and finger tremor correctors (Liu and Zhang, 2024), demonstrating its potential as an efficient novel actuation solution. Notably, the conical structure of PVC gel exhibits exceptional application value in flexible grasping and precise directional actuation owing to its unique morphology. Therefore, theoretical modeling of conical PVC gel structures is crucial for unlocking their full application potential.
The dynamic behavior of PVC gel under load is directly relevant to its applications, and has therefore attracted increasing research attention to the dynamic characteristics of PVC gel actuators. Current research trends primarily focus on three directions: theoretical modeling, performance optimization, and application exploration. Among these, theoretical modeling provides fundamental guidelines for application structures. Lei et al. conducted quasi-static and dynamic mechanical compression tests on PVC gel elastomers under different conditions, establishing the Yeoh hyperelastic model and a rate-dependent viscoelastic model that accurately describes the material’s static behavior (Lei et al., 2020). Du et al. developed a constrained theoretical model for circular planar PVC gel actuators, performed finite element verification, analyzed the vibration characteristics, and predicted the deformation under different bias voltages for various dibutyl adipate contents (Du et al., 2024). Li et al. adopted the Gent constitutive model to predict the deformation mechanism of fiber-constrained PVC gels, estimated their electrical responses under different pre-stretch ratios and voltage amplitudes, and validated the predictions experimentally (Li et al., 2023). Luo et al. developed a mathematical model for the vibration behavior of planar square PVC gel films and systematically analyzed their dynamic response characteristics with varying geometric parameters (Luo et al., 2024).
The Gent hyperelastic model (Gent, 1996) adopted in the constitutive framework of this study is a well-established phenomenological model for describing the large deformation behavior of rubber-like polymers. Unlike Gaussian-based models such as the Neo-Hookean and Yeoh models, the Gent model is rooted in non-Gaussian statistics and accounts for the finite extensibility of polymer chains, making it more physically realistic for materials approaching their stretch limit. The Gent model characterizes this finite extensibility through the parameter . In the limit , the Gent model naturally reduces to the classical Neo-Hookean model. Originally proposed by Gent (1996), the model has since been widely adopted in the field of electroactive polymers. The material parameters () required by the Gent model are physically meaningful quantities that can be determined through standard experimental characterization procedures. Therefore, although the present study focuses on the theoretical modeling and nonlinear dynamic analysis of the conical configuration, the underlying constitutive framework rests on a solid theoretical foundation, ensuring the physical realizability of the proposed model.
The present work on conical PVC gel actuators is underpinned by broader advances in nonlinear dynamics. The concept of regulating system stiffness with multistable mechanisms has laid a solid foundation for vibration mitigation and energy conversion. Studies have shown that hybrid vibration isolators with negative stiffness springs can effectively attenuate low-frequency vibrations (Huang et al., 2025), and that magnetoelastic tunable bistable (Huang et al., 2024) and quad-stable (Zhang et al., 2024) energy converters can achieve broadband performance by facilitating interwell chaotic motions. Concurrently, the “energy shunt” perspective—which views vibration suppression in terms of mechanical energy transfer, dissipation, and conversion—has provided a unified methodology for designing and evaluating such nonlinear systems (Huang and Yang, 2023). Notably, these advances have been successfully translated into high-performance devices. Dynamic bistable electromagnetic harvesters have demonstrated substantially enhanced power output under ultra-low-frequency excitations (Fang et al., 2026), while absorbers with multi-stiffness combinations have achieved simultaneous vibration mitigation and energy harvesting by exploiting the synergistic effects of hybrid nonlinear oscillators (Huang, 2024). Furthermore, the applicability of nonlinear dynamics has been expanded to complex scenarios such as flow-induced vibration energy harvesting (Huang and Zhong, 2023). Most fundamentally for the present study, Huang and Yang (2021) thoroughly investigated the energy trapping and conversion performances of a multistable vibration absorber, establishing the core analytical framework of interwell dynamics and targeted energy transfer that directly informs our modeling of the conical PVC gel actuator.
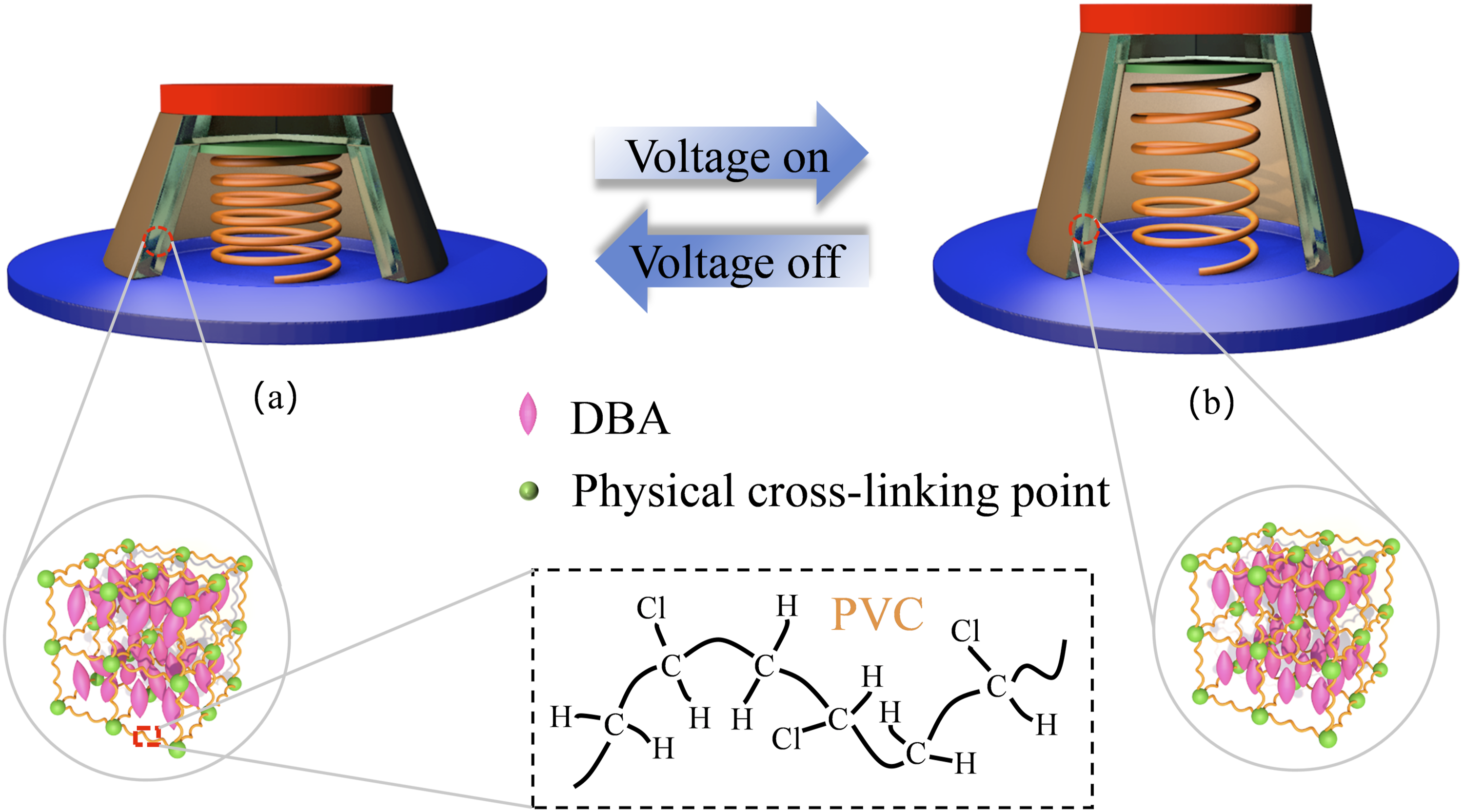
Overall, theoretical research on PVC gel has been largely confined to planar structures with simple geometric shapes, while modeling and dynamic studies of conical structures remain unexplored in existing research. To address this gap, this paper establishes a nonlinear dynamic model for a conical PVC gel actuator based on the Euler-Lagrange equation. Using this model, we investigate the effects of four key parameters (damping ratio, voltage amplitude, pre-stretch ratio, and tensile limit) on the actuator’s vibration, along with the influence of spring stiffness. Bifurcation and Lyapunov exponent analyses are performed to determine the critical thresholds for state transitions under varying parameters, thereby providing a design basis and theoretical foundation for conical PVC gel actuators. This study not only provides a theoretical design basis and fundamental support for the development of conical PVC gel actuators, but also is expected to promote the technological advancement of related fields such as soft robotics, intelligent manufacturing, and wearable devices. Combined with advanced processing and material characterization techniques, the research results can also provide theoretical guidance for the development of PVC gel actuators with improved response speed, load capacity, and durability (Figure1).
The deformation principle diagram of PVC gel cone structure actuator. (a) PVC gel cone actuator without voltage. (b) PVC gel cone actuator driven by voltage.
2. Physical model of three-dimensional conical actuator
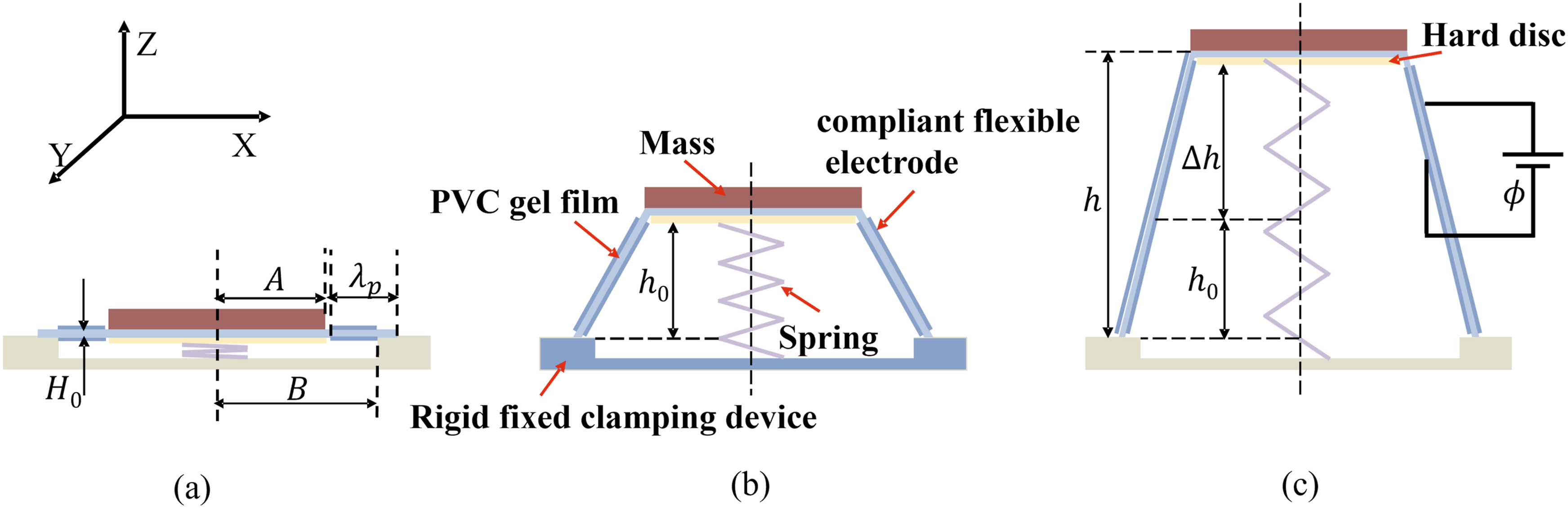
Figure 2 illustrates the three typical states of the conical actuator. In the compressed state in Figure 2(a), the spring is fully compressed and the PVC gel film is radially pre-stretched. After release, the system reaches the initial equilibrium state in Figure 2(b), where the spring’s restoring force balances the elastic force of the PVC gel, establishing an initial cone height . When an external voltage is applied to the flexible electrodes (Figure 2(c)), charge accumulates on the electrodes. Owing to the incompressibility of the PVC gel, the film thickness decreases and its area expands, producing a vertical displacement and increasing the cone height to .
Vibration deformation structure diagram of conical PVC gel actuator.
In this study, the Euler-Lagrange equation was used to establish the analytical model of the PVC gel cone structure to drive the system. Therefore, the kinetic control equation of PVC gel is established as follows:
In equation (1), L is the Lagrange function, V is the kinetic energy of PVC gel system, U is the potential energy of PVC gel system, is the variable of PVC gel system-variable height h and electric displacement D, is the work of PVC gel system damping ratio, and c is the damping coefficient.
In this system, the mass of the mass block is much larger than that of the PVC gel film and the spring. Therefore, the kinetic energy V of the system can be expressed by equation (2).
The potential energy U of the system is composed of the Helmholtz free energy of PVC gel, the elastic potential energy of the spring and the work done by the external excitation voltage. Therefore, we established the potential energy equation of the system as follows
In equation (3), W denotes the Helmholtz free energy density of PVC gel film, k denotes the stiffness of linear spring, denotes the initial height of PVC gel film, and h denotes the variable height of PVC gel film.
Because PVC gel is an ideal incompressible elastomer, the tensile deformation rate of PVC gel material in X, Y and Z directions is . Therefore, the strain energy density function of PVC gel was described by the superelastic material Gent model in this study. The Helmholtz free energy density W is expressed as follows
In equation (4), is the shear modulus of PVC gel material, is the tensile limit of PVC molecular chain, and is the dielectric constant of PVC gel. D is the electric displacement.
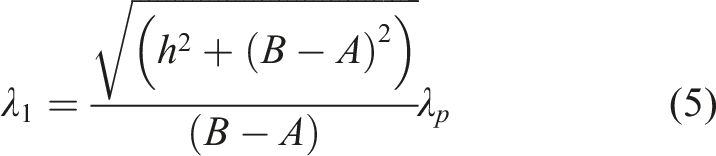
According to the geometric relationship, the axial tensile ratio of the conical PVC gel structure actuator can be expressed as follows
The PVC gel film is fixed in the radial direction by a rigid fixed clamping device, so the radial stretching . The accumulated charge on the electrode can be expressed as equation (2). Under the stimulation of external sinusoidal voltage, the amount of charge accumulated on the flexible electrode on the upper and lower surfaces of the PVC gel film is Q
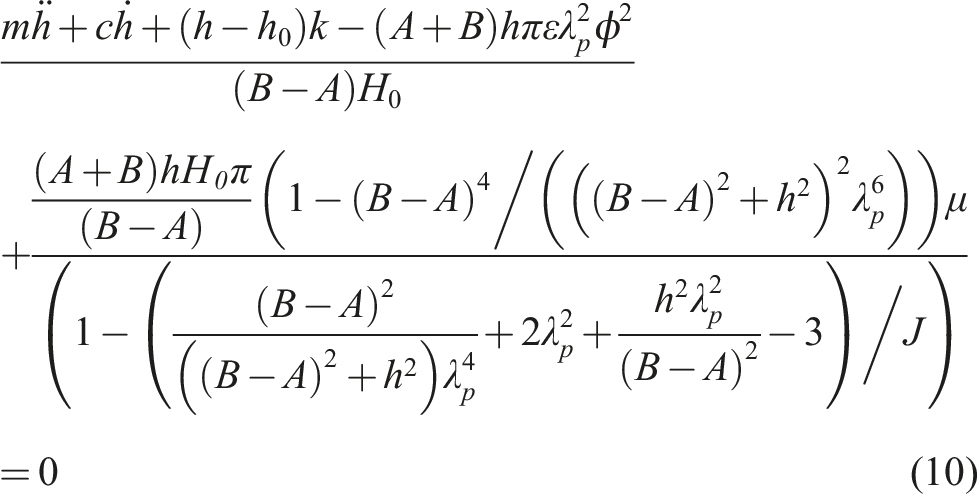
Thus, the Euler-Lagrange equations of variable height h and electric displacement D are shown in equations (7) and (8).
Substituting Formulas (1-6) into equations (7) and (8), equation (9) and (10) can be obtained. The equations are as follows.
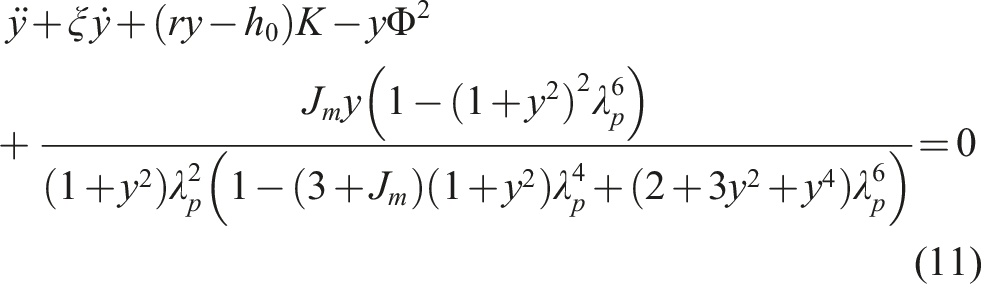
Equation (11) can be obtained by further simplifying equation (10).
Equation (11) is the control equation of PVC gel cone structure actuator, where , , , , ,
Equation (11) describes the vibration state of the conical PVC gel actuator. The fourth-order Runge-Kutta method was used to solve Eq. (11). To validate the numerical implementation, a reduced linear case was tested: setting , and taking (the Neo-Hookean limit) reduces Eq. (11) to a conservative linear oscillator. The numerical solution reproduces the analytical sinusoidal waveform with constant amplitude and perfectly closed elliptical phase portrait, confirming negligible error.
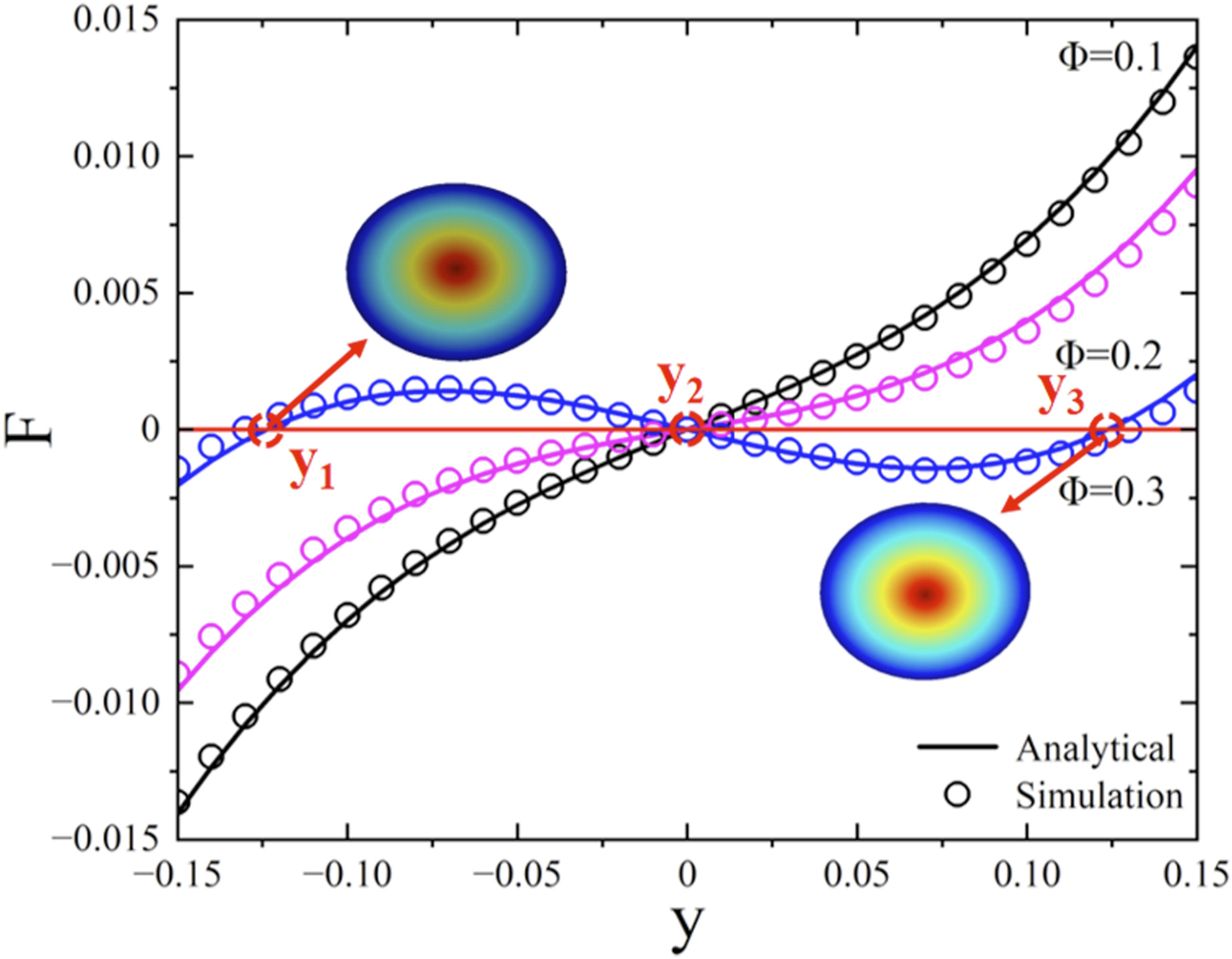
To validate the proposed analytical model, a static force-displacement analysis was performed and compared with finite element simulations conducted in COMSOL Multiphysics. In the static equilibrium state, both acceleration and velocity are zero, and the reaction force on the top surface can be determined from equation (11). Figure 3 presents the force-displacement curves at three representative voltage levels (). When the voltage reaches , the curve intersects the zero-force baseline at three points , , and , corresponding to three equilibrium positions. The positive slopes at and indicate stable equilibria, while the negative slope at indicates an unstable equilibrium, demonstrating that the conical PVC gel actuator exhibits bistable mechanical behavior under specific driving conditions. The finite element results are shown as markers alongside the analytical solutions (solid lines) in Figure 3. The close agreement at all three voltage levels provides strong evidence for the accuracy of the derived analytical model (Table 1).
Validation of the analytical model: static force-displacement curves at three voltage levels (). Solid lines: analytical predictions. Markers: COMSOL finite element results. The three intersections with the zero-force baseline at confirm the bistable nature of the actuator.
Structural and material parameters used in the model validation.
Symbol
Parameter
Value
Unit
Radius of the hard disc
10
mm
Circular radius of the PVC gel film
50
mm
Initial height
0
mm
Tensile limit
50
-
Linear stiffness of the spring
1.5
-
Radial pre-stretching
1
-
Equation (11) is expressed in dimensionless form, which endows the model with generality. The geometric parameters , , and can be adjusted to represent different sizes and aspect ratios, while the material constants , , , and can be determined experimentally for various PVC gel formulations. Moreover, the dimensionless formulation ensures that systems with different physical dimensions but identical dimensionless parameters exhibit qualitatively similar dynamic behavior. Hence, this framework provides a universal design guideline for conical PVC gel actuators across a wide range of geometries and material compositions.
Based on the above, we discuss the vibration of the conical actuator under variations of damping ratio , spring stiffness , voltage amplitude and pre-stretch , and tensile limit .
3. Nonlinear vibration of the conical PVC gel actuator under internal and external factors
The PVC gel cone actuator will undergo large deformation under electromechanical coupling, so it has good driving performance (Acharya et al., 2023; Mehraeen et al., 2023; Shin et al., 2018). The factors affecting the driving behavior of the system mainly come from the material characteristics of the system itself and the external excitation conditions. Firstly, due to the different proportion of DBA molecules and PVC molecules in the formula and the different configuration process, PVC gel films with different damping ratio and tensile limits will be obtained in the production process of PVC gel materials, which further leads to the vibration performance of PVC gel cone actuators will be different. Secondly, the difference of external voltage amplitude, pre-stretched external force and linear spring stiffness will also change the nonlinear vibration behavior of PVC gel cone actuator. In this study, the sinusoidal voltage , the initial conditions are , .
3.1. Nonlinear vibration of PVC gel cone actuator under different damping ratio
The existence of damping ratio will directly affect the vibration effect of PVC gel and change the vibration state of the conical structure actuator. Now the vibration of PVC gel with dimensionless damping ratio in the range of (0-1) is analyzed and discussed. The values of other parameters are as follows: pre-stretching ,voltage amplitude , tensile limit , and spring stiffness .
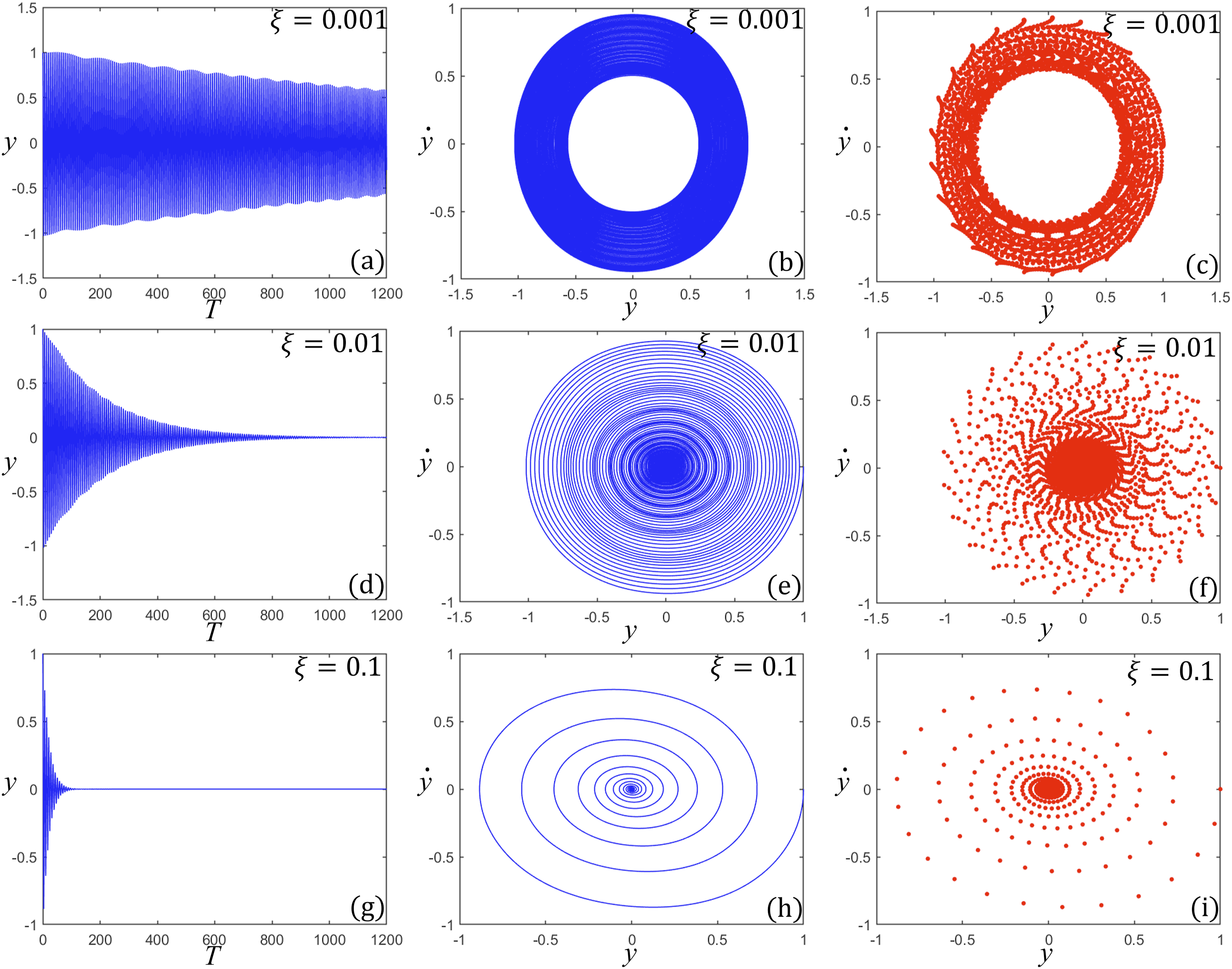
Figure 4(a)–(c) show the stable periodic vibration of the actuator at : the time-domain response is uniform and regular with slow amplitude decay, the phase trajectory forms a closed ellipse centered at a fixed point, and the Poincaré map displays a dense ring-like distribution of discrete points circulating around the fixed-point attractor.
The time-domain response, phase trajectory, and Poincaré map of the damping ratio are (a-c), (d-f), (g-i), respectively.
At (Figure 4(d)–(f)), the system transitions to damped periodic motion: the time-domain response exhibits gradual amplitude decay, the phase portrait depicts a spiral trajectory converging toward the fixed-point attractor, and the extended-time Poincaré map shows a dense cloud-like cluster of points reflecting the full spiral convergence.
When (Figure 4(g)–(i)), the vibration attenuation rate increases significantly. Within the dimensionless time frame, the amplitude decays extremely rapidly and becomes negligible thereafter. The phase trajectory converges directly to the fixed-point attractor, and the discrete points in the Poincaré map are tightly clustered at the attractor, indicating overdamped motion (strongly damped oscillations) and a stable equilibrium state.
In summary, as the damping ratio increases, the conical PVC gel actuator transitions from stable periodic vibration to damped periodic vibration, and ultimately reaches a stable state with minimal residual amplitude. Thus, the damping ratio exerts a regulatory effect on the vibrational deformation of the conical PVC gel actuator.
3.2. Nonlinear vibration of conical PVC gel actuator under different tensile limits
The tensile limit is the maximum stress or strain that PVC gel can withstand when subjected to external tensile force. Due to the different ratio of PVC gel production, the tensile limit of PVC molecules will also change, and different tensile limits will affect the ductility of PVC gel. The damping ratio , the pre-stretching , the voltage amplitude , and the spring stiffness . The change of tensile limit is discussed and analyzed below.
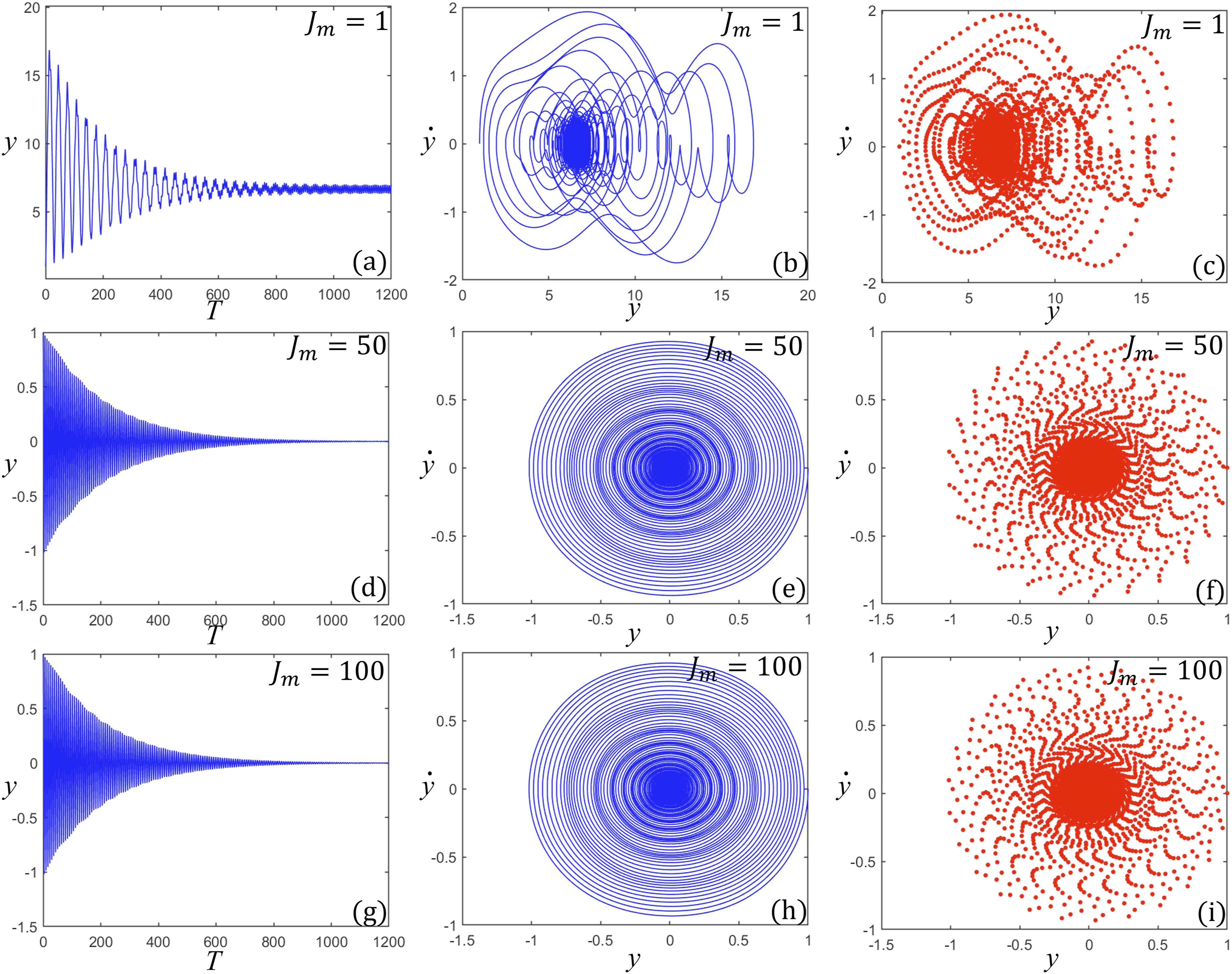
By comparing the vibration states under different tensile limits shown in Figure 5, a clear transition in dynamic behavior is observed: the system evolves from chaotic motion (at small ) to stable damped periodic motion (at larger ) As illustrated in Figure 5(a)–(c) (), the time-domain response exhibits persistent oscillations with slow amplitude decay. The phase trajectory forms a complex, tangled spiral, and the Poincaré map displays a scattered distribution of discrete points. These features indicate chaotic behavior under the small tensile limit .
The time-domain response, phase trajectory and Poincaré map of the stretching limit are (a-c), (d-f), (g-i), respectively.
For (Figure 5(d)–(i)), the system consistently evolves into stable damped periodic motion with nearly identical vibration characteristics for both values. The amplitude decays at a moderate rate (faster than that at ), with the phase trajectory converging into a regular spiral toward the fixed-point attractor for both . The Poincaré map for both parameters shows a dense cluster of points tightly gathered around the attractor, with only negligible differences in the degree of concentration between the two values.
Therefore, at the selected finite values (), the tensile limit exhibits a clear threshold-dependent regulatory effect on the vibration state: leads to chaotic behavior. while stabilize the system into damped periodic motion, with negligible difference between .
This threshold-dependent effect originates from how the tensile limit governs the microstructural deformation mechanism and the macroscopic energy response of the polymer network.
From a microstructural viewpoint, directly encodes the limiting extensibility of the polymer network. When is small (e.g., ), a substantial fraction of chain segments approach their fully extended limit under moderate deformation. These near-fully-extended segments tend to align along the stretching direction, forming locally oriented domains. Further deformation then encounters the strong resistance of the chain backbone, marking a transition from entropic elasticity (dominated by chain conformational entropy) to enthalpic elasticity (dominated by bond stretching and angle deformation). This stretch-induced chain alignment and the associated entropic-to-enthalpic transition are the physical origin of the rapid nonlinear stiffening observed at small . When is large (e.g., ), the network retains ample extensibility, the chains remain in highly disordered random-coil configurations, and the elastic response remains predominantly entropic with gradual stiffening.
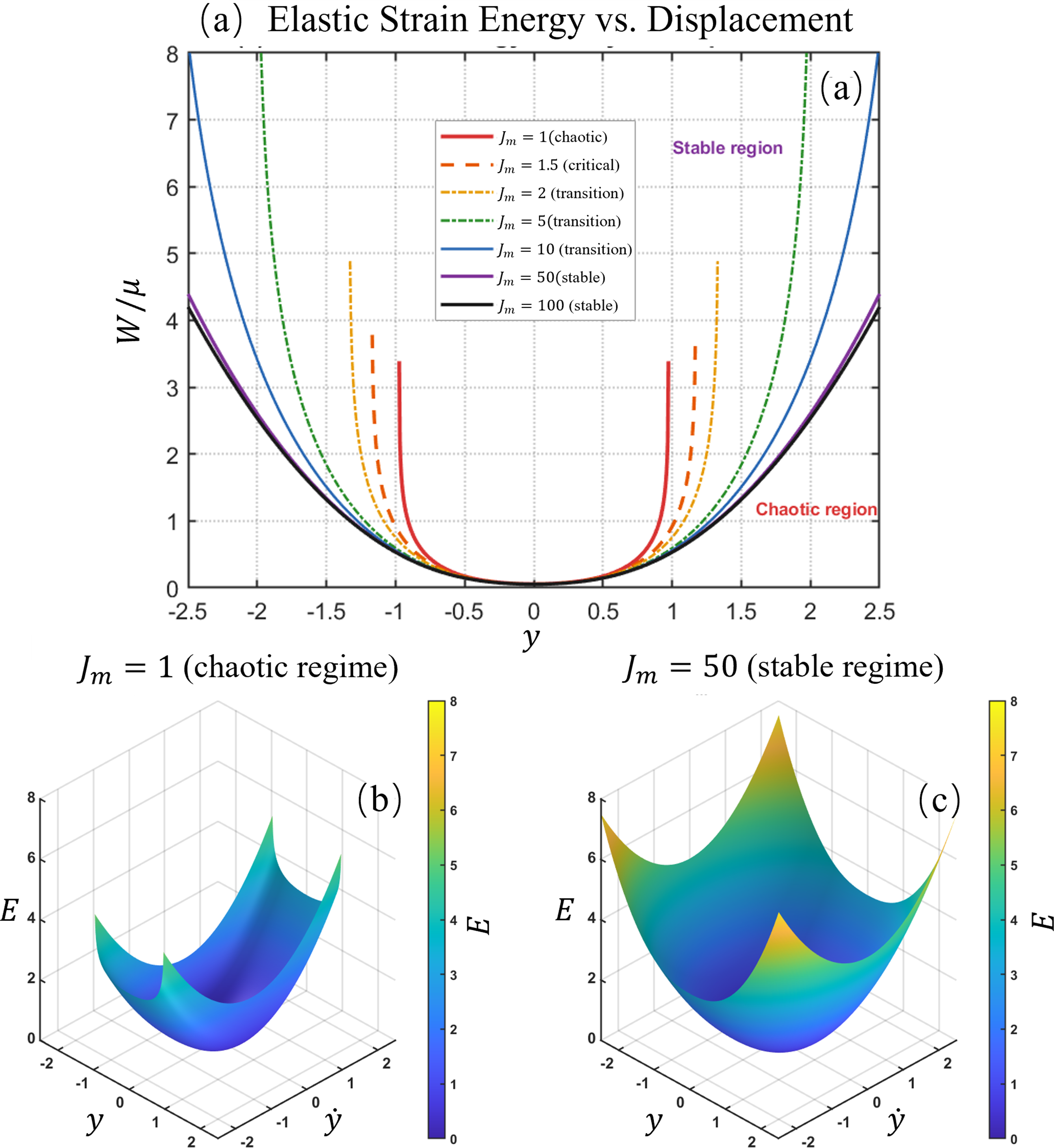
The above microstructural mechanism is directly reflected in the elastic strain energy density distributions presented in Figure 6(a), which shows as a function of the dimensionless displacement for seven different values of . The curve for rises sharply near the stretch limit, reflecting the enthalpic stiffening that promotes chaotic vibrations. As increases to 1.5 and 2, the steepness of the curves progressively decreases. For , the curves become smooth and nearly coincident, consistent with the stable damped periodic motion observed in Figure 5. This continuous transition from steep to gradual visually demonstrates the regulatory effect of the tensile limit on the strain energy response. Figure 6(b) and (c) further provides a three-dimensional comparison of the potential energy surfaces for and : the former forms a narrow, sharply rising energy landscape near the stretch limit, while the latter is broad and shallow, complementing the above energy regulation mechanism from the dual perspectives of displacement and velocity. The critical threshold separating the chaotic and stable regimes is quantitatively identified in Section four.
(a) Elastic strain energy density as a function of dimensionless displacement for different tensile limits (b) Three-dimensional potential energy surface for (chaotic regime). (c) Same for (stable regime).
3.3. Nonlinear vibration of conical PVC gel actuators under different voltage amplitude
PVC gel is highly sensitive to electrical stimulation, and voltage is the main power source of the actuator. Thus, this section discusses the influence of the change of periodic sinusoidal voltage amplitude on the vibration of PVC gel actuator, and explores the influence of different voltage amplitude on the time-domain response, phase trajectory and Poincare mapping of PVC gel actuator vibration. The damping ratio , the tensile limit , the pre-stretch , and the spring stiffness .
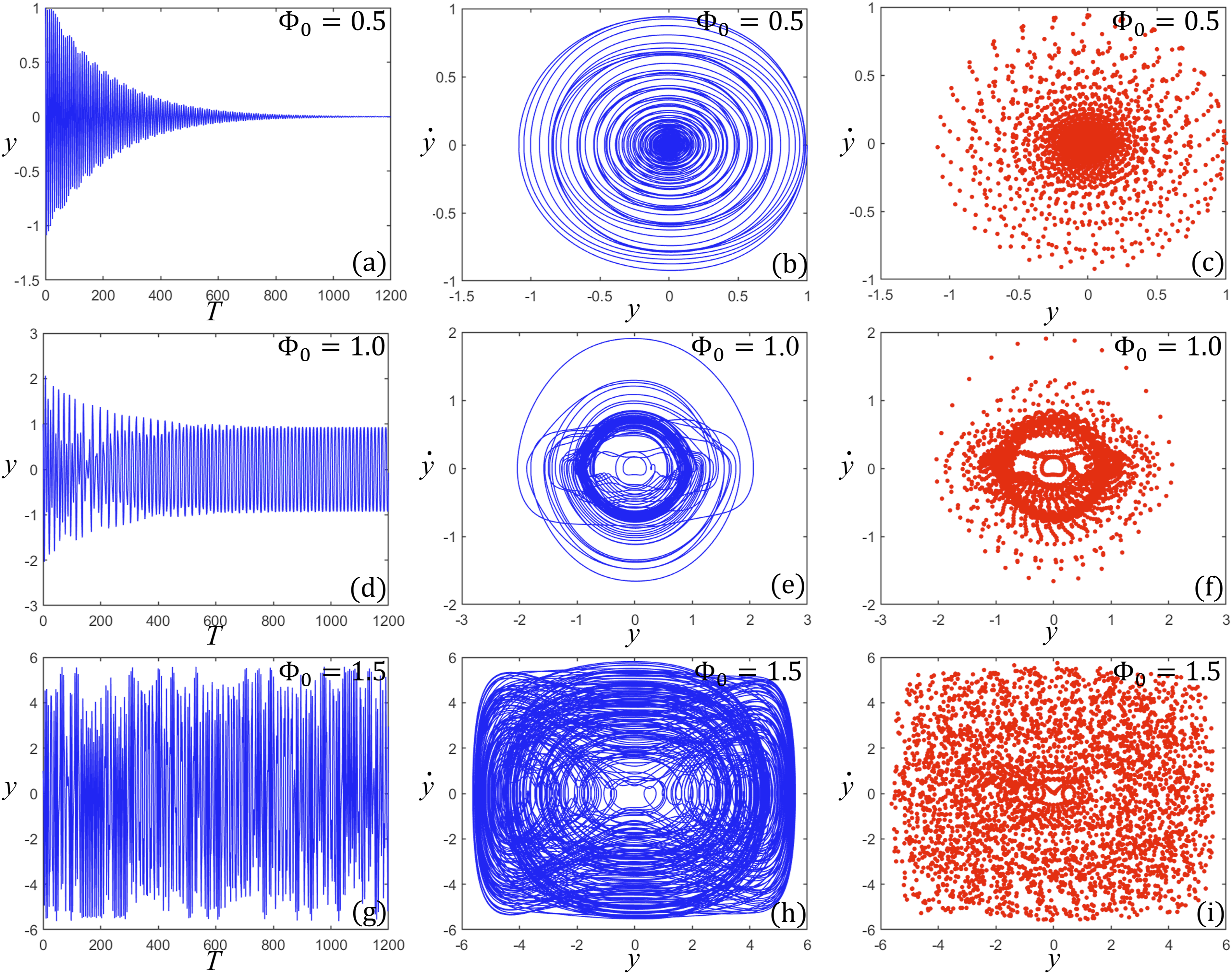
At (Figure 7(a)–(c)), the actuator exhibits stable damped periodic convergence: the time-domain response shows rapid, smooth amplitude decay to zero, the phase trajectory forms a regular concentric spiral toward the fixed-point attractor, and the Poincaré map displays a dense cluster of points tightly gathered around the center.
The time-domain response, phase trajectory, and Poincaré map of the voltage amplitude are (a-c), (d-f), and (g-i), respectively.
At (Figure 7(d)–(f)), the system transitions to transitional quasi-periodic chaotic motion: the time-domain response shows persistent oscillations with slow amplitude decay (eventually stabilizing to small-amplitude “beat” behavior), the phase trajectory evolves into a tangled multi-looped spiral converging to a small limit cycle, and the Poincaré map displays scattered discrete points circulating around the central attractor.
At (Figure 7(g)–(i)), the system evolves into fully developed chaotic vibration: the time-domain response exhibits irregular oscillations with no clear law (amplitude up to 6), the phase portrait shows chaotic dynamics without divergence, and the Poincaré section displays a dispersed chaotic scatter with no closed trajectory.
In summary, the conical PVC gel actuator exhibits stable quasi-periodic vibration under low voltage. However, as the voltage amplitude increases, the motion transitions from quasi-periodic to chaotic, with a transitional state occurring in between. Ultimately, high voltage will cause breakdown of the PVC gel film, resulting in failure of the drive system’s deformation.
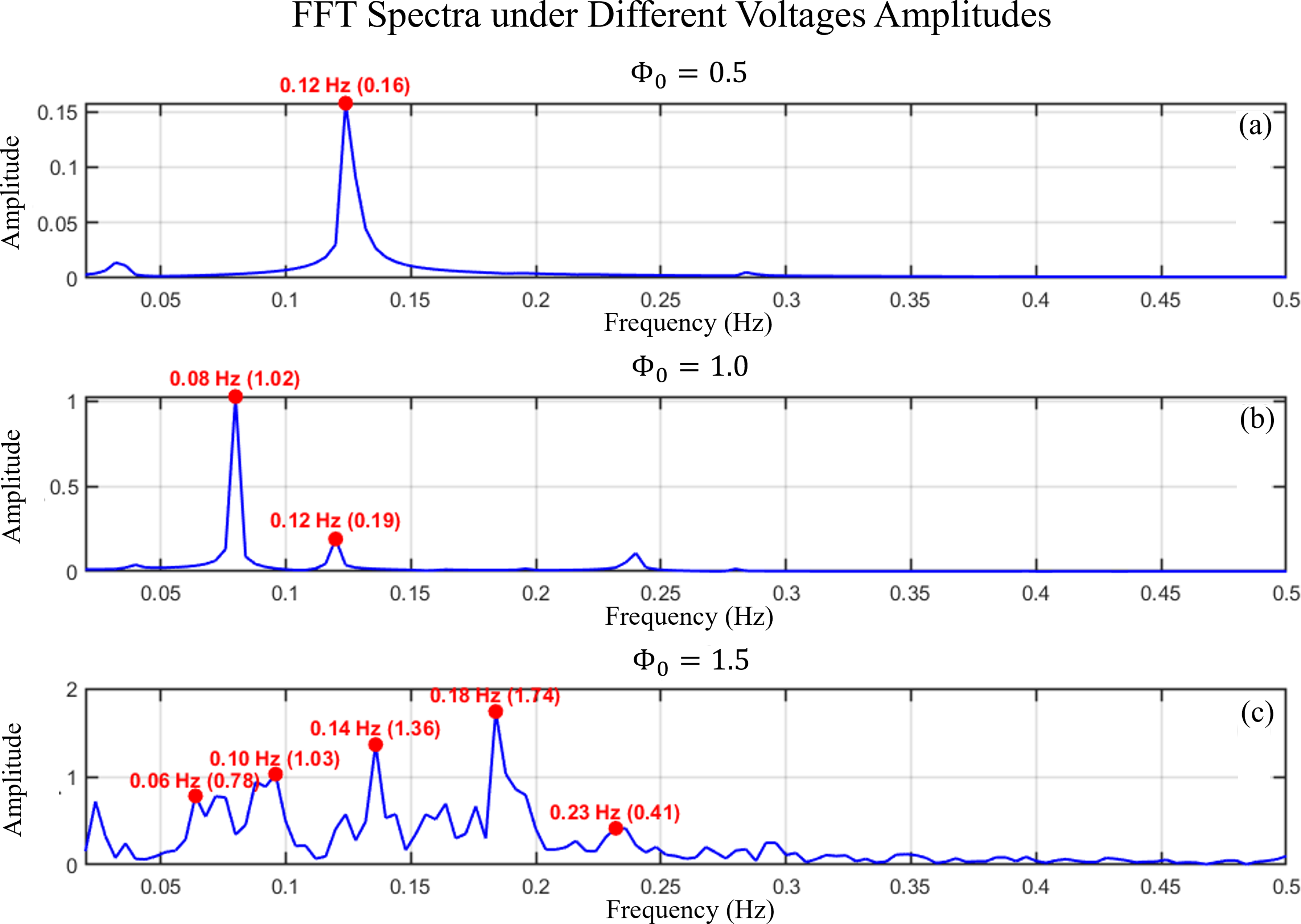
To complement the time-domain analysis, frequency-domain characterization was performed. Figure 8 presents the FFT spectra corresponding to the three voltage amplitudes discussed in this section. At , the spectrum exhibits a single dominant peak at the excitation frequency, confirming damped periodic motion. At , the peak splits into multiple dispersed frequency components, indicating a quasi-periodic transition. At , the spectrum becomes a broadband distribution with multiple peaks and no isolated dominant frequency, confirming fully developed chaos. These spectral features are consistent with the time-domain, phase-space, and Poincaré map analyses presented in Figure 7.
FFT spectra of the vibration response under different voltage amplitudes: (a) , (b) , (c) .
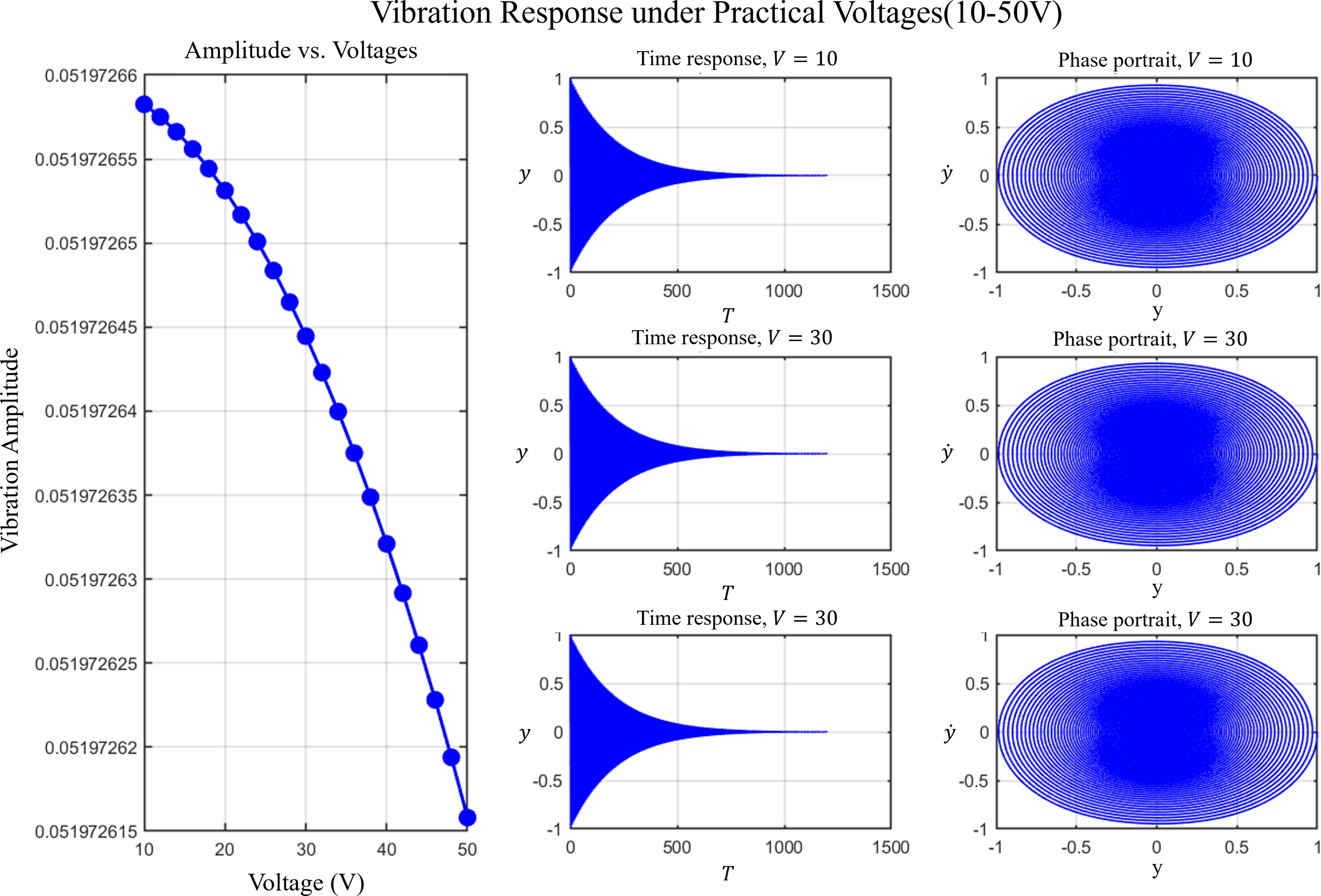
To further assess the vibration behavior within a practical voltage range, Figure 9 presents the steady-state vibration amplitude as a function of physical voltage from 10 to 50V, along with the time-domain responses and phase portraits at selected voltages. Using the material parameters , , and , these voltages correspond to dimensionless values on the order of to , which are several orders of magnitude lower than the dimensionless voltages analyzed in the preceding sections. As shown in Figure 9, the amplitude remains nearly constant across the entire range, and all time-domain and phase-portrait results confirm stable damped periodic motion. This indicates that the electrical excitation at these voltage levels is insufficient to induce qualitative changes in the vibration regime. The bifurcation analysis presented in Section four further confirms that the critical threshold for chaotic motion lies far above the 10-50V range. Consequently, the actuator operates with a substantial safety margin under practical driving voltages.
Vibration response under practical voltage range (10-50V). Left: steady-state vibration amplitude versus voltage. Right: time-domain responses and phase portraits at selected voltages (10, 30, and 50V).
3.4. Nonlinear vibration of conical PVC gel actuator under different pre-stretching effects
Pre-stretching is the mechanical external force of PVC gel film before applying periodic voltage. Different pre-stretching external forces make the tension of PVC gel film different, which further affects the vibration deformation of PVC gel cone actuator. Set the basic parameter damping ratio , the tensile limit , the voltage amplitude , and the spring stiffness . The vibration state of PVC gel cone actuator with pre-stretching is discussed below.
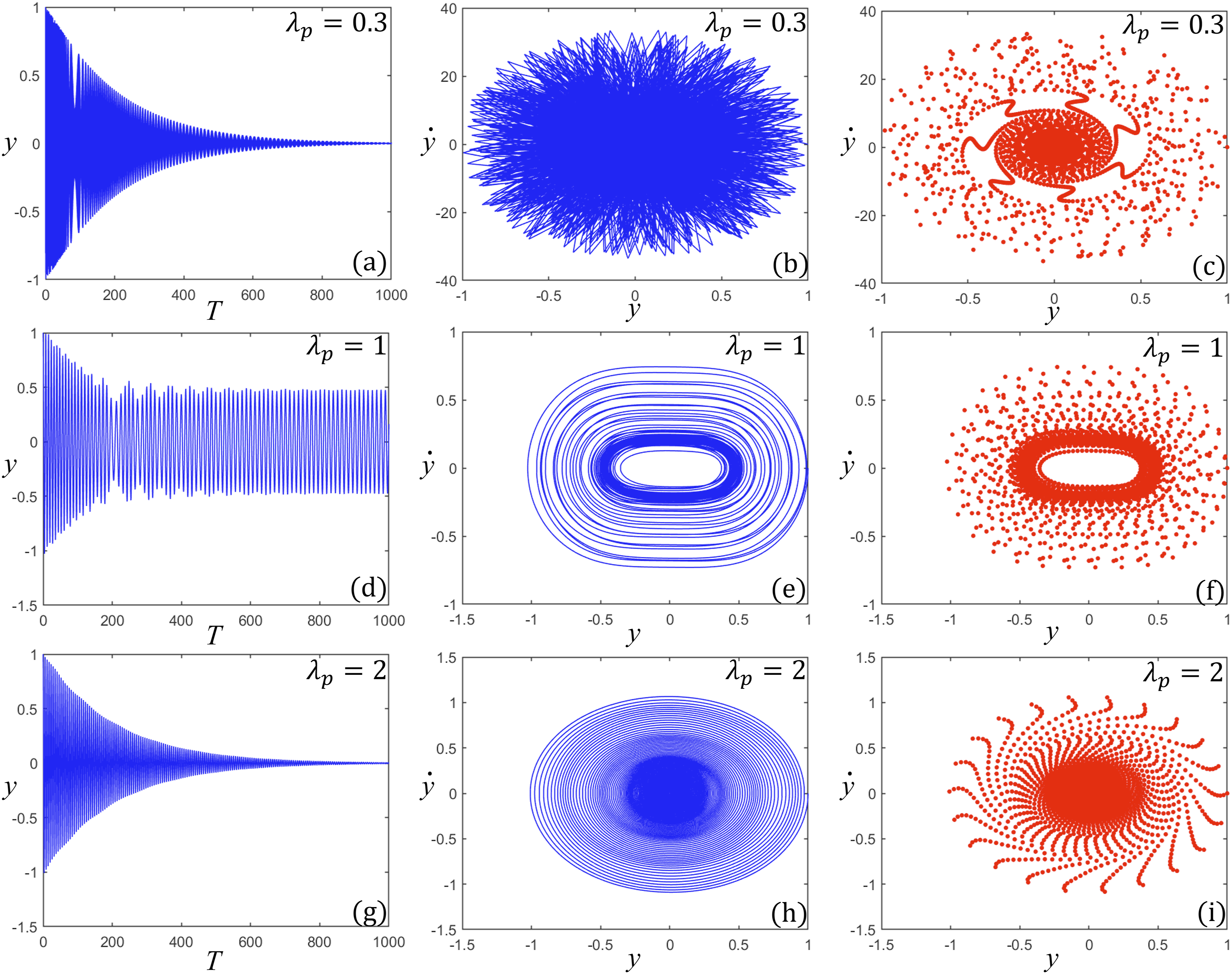
At (Figure 10(a)–(c)), the actuator exhibits fully developed chaotic motion: the time-domain response starts with large-amplitude oscillations (−1 to 1) that decay under damping, but shows persistent irregularities, spiky jumps, and phase distortions. The phase portrait forms a large, tangled strange attractor with no repeating loops, and the Poincaré section displays a dense, irregular cluster of points with wavy edges.
The time-domain response, phase trajectory, and Poincaré map of the pre-stretched are (a-c), (d-f), and (g-i), respectively.
At (Figure 10(d)–(f)), the system transitions to transitional weakly chaotic motion: the time-domain response decays initially and stabilizes into small-amplitude periodic oscillations. The phase trajectory evolves into a well-defined elliptical limit cycle with nested converging loops, and the Poincaré section forms a closed ring of points around the central limit cycle.
At (Figure 10(g)–(i)), the system evolves into stable damped convergence: the time-domain response shows the fastest amplitude decay to zero, with smooth, regular damped sine oscillations that gradually vanish. The phase portrait forms a tight concentric spiral converging to the fixed-point attractor, and the Poincaré section shows a dense cluster of points tightly concentrated at the center.
In summary, the pre-stretch ratio exhibits a clear stabilizing effect: small pre-stretch () induces strongly chaotic motion, moderate pre-stretch () leads to stable quasi-periodic motion, and larger pre-stretch () yields stable damped convergence. Increasing effectively suppresses chaotic dynamics and promotes convergence toward equilibrium, while excessively small pre-stretch may introduce structural instability.
3.5. Nonlinear vibration of conical PVC gel actuator under the influence of different spring stiffness coefficient
Spring is the supporting device of PVC gel cone actuator. Because of the existence of the spring, PVC gel film can maintain a good cone structure. Therefore, springs with different stiffness coefficients have different effects on the vibration state of PVC gel cone actuators, and different stiffness coefficients need to be discussed. The damping ratio , the tensile limit , the pre-stretching , and the voltage amplitude .
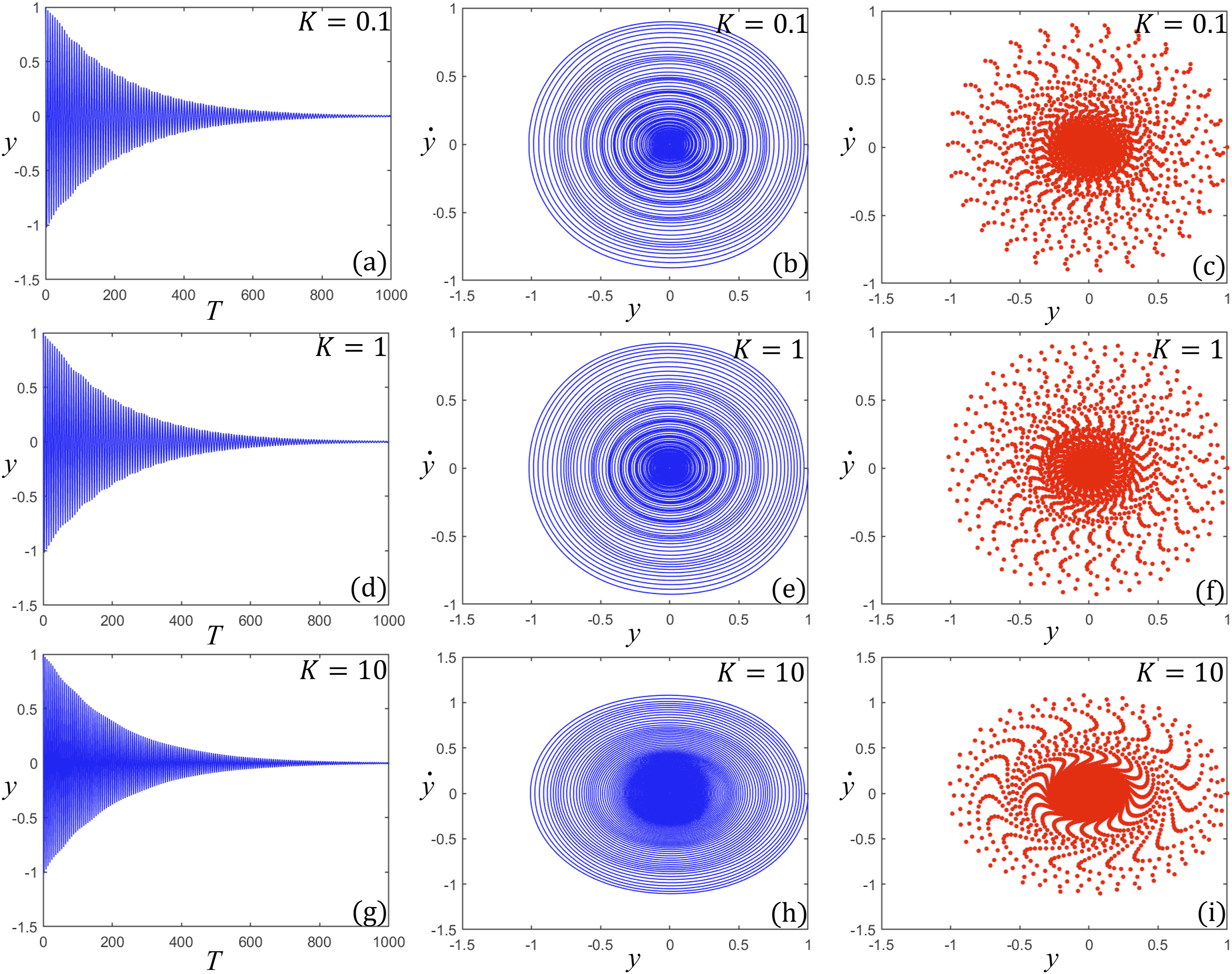
It can be seen from Figure 11 that the vibration state of the conical PVC gel actuator also changes with spring stiffness . From the time-domain responses (Figure 11(a),(d),(g)), increasing spring stiffness raises the vibration frequency without affecting the attenuation speed or amplitude. The phase trajectories (Figure 11(b),(e),(h)) show that the ordinate value increases with , and the trajectory gradually becomes denser. The Poincaré sections (Figure 11(c),(f),(i)) consistently form a dense curve across all studied , indicating stable damped convergence. Therefore, changes in spring stiffness only alter the vibration frequency, while the stable damped vibration state remains unchanged. This condition allows the manufacture of fixed-frequency conical actuators with different operating frequencies.
The time-domain response, phase trajectory, and Poincaré map of the spring stiffness coefficients are (a-c), (d-f), and (g-i), respectively.
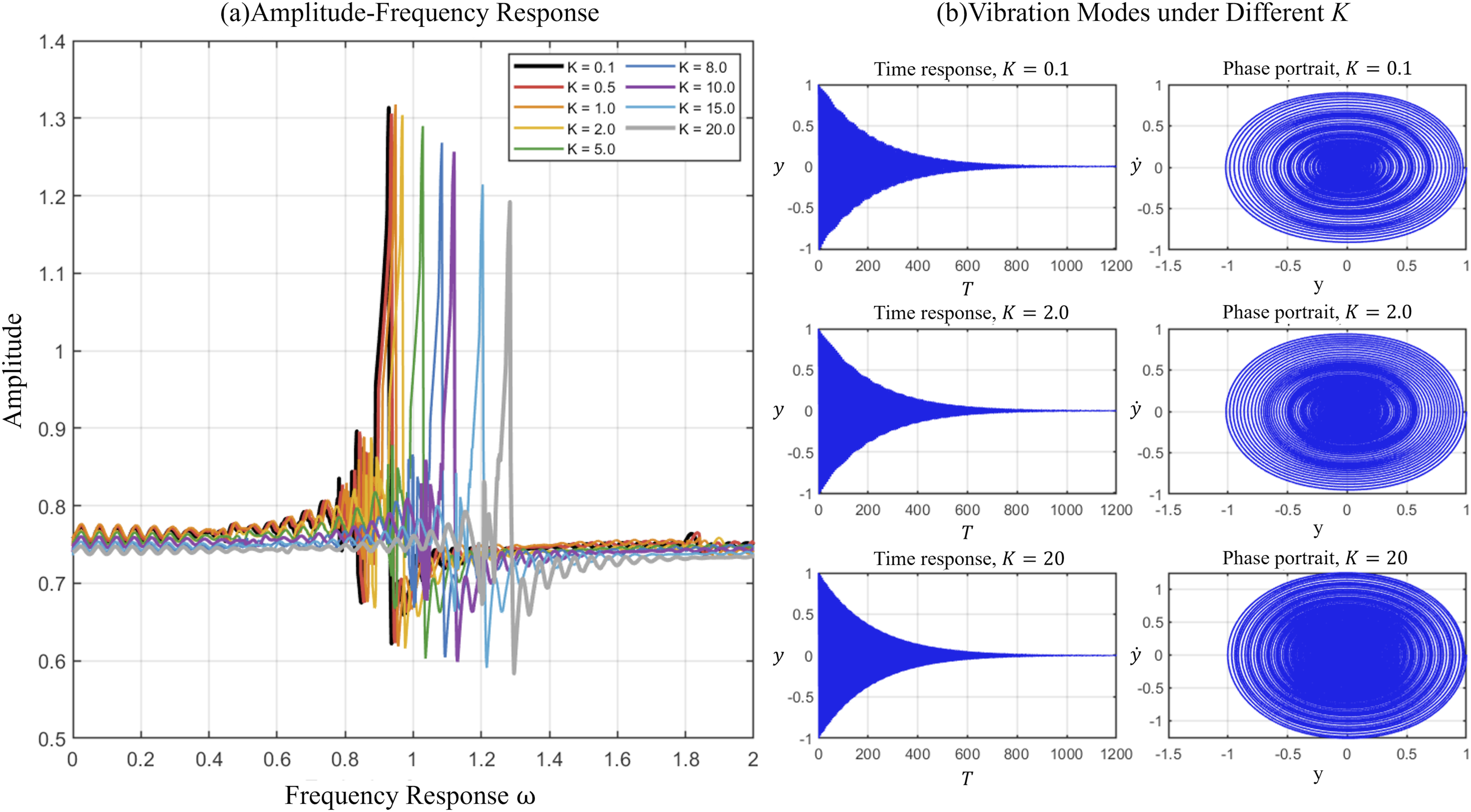
While the time-domain responses in Figure 11 confirm that does not alter the qualitative nature of the vibration, a more comprehensive stability analysis can be obtained by examining the system’s frequency-domain behavior. To this end, Figure 12(a) presents the amplitude-frequency response curves for ranging from 0.1 to 20. The resonance peak shifts systematically toward higher frequencies as increases, and the peak amplitude decreases monotonically. No nonlinear jump or bifurcation is observed across the entire stiffness range, indicating that the system remains in a stable damped periodic regime regardless of the spring stiffness value. Figure 12(b) shows the time-domain responses and phase portraits at three representative stiffness values (). All cases exhibit stable damped periodic motion. As increases, the vibration frequency increases and the amplitude decreases, but the qualitative nature of the motion remains unchanged. These results demonstrate that the spring stiffness affects only the vibration frequency and amplitude, without inducing qualitative changes in the vibration mode or stability. From a design perspective, this is a favorable characteristic, as it allows conical PVC gel actuators with different operating frequencies to be realized by selecting appropriate spring stiffness values, without compromising system stability.
(a) Amplitude-frequency response curves for different spring stiffness values ; (b) Time responses and phase portraits for three representative stiffness values (), illustrating the evolution of vibration modes with stiffness.
4. Threshold analysis of PVC gel cone actuator under different parameter change process
The changes in internal factors and external conditions significantly alter the vibration state of the three-dimensional conical actuator system. To improve vibration stability and controllability for effective actuation, we analyze four key parameters individually: damping ratio , voltage amplitude , pre-stretching ratio , and tensile limit . Basic parameters are fixed as follows: , , , , and . We investigate the bifurcation characteristics of each single parameter to explore periodic vibration state transitions, which are further verified by quantitative Lyapunov exponent analysis.
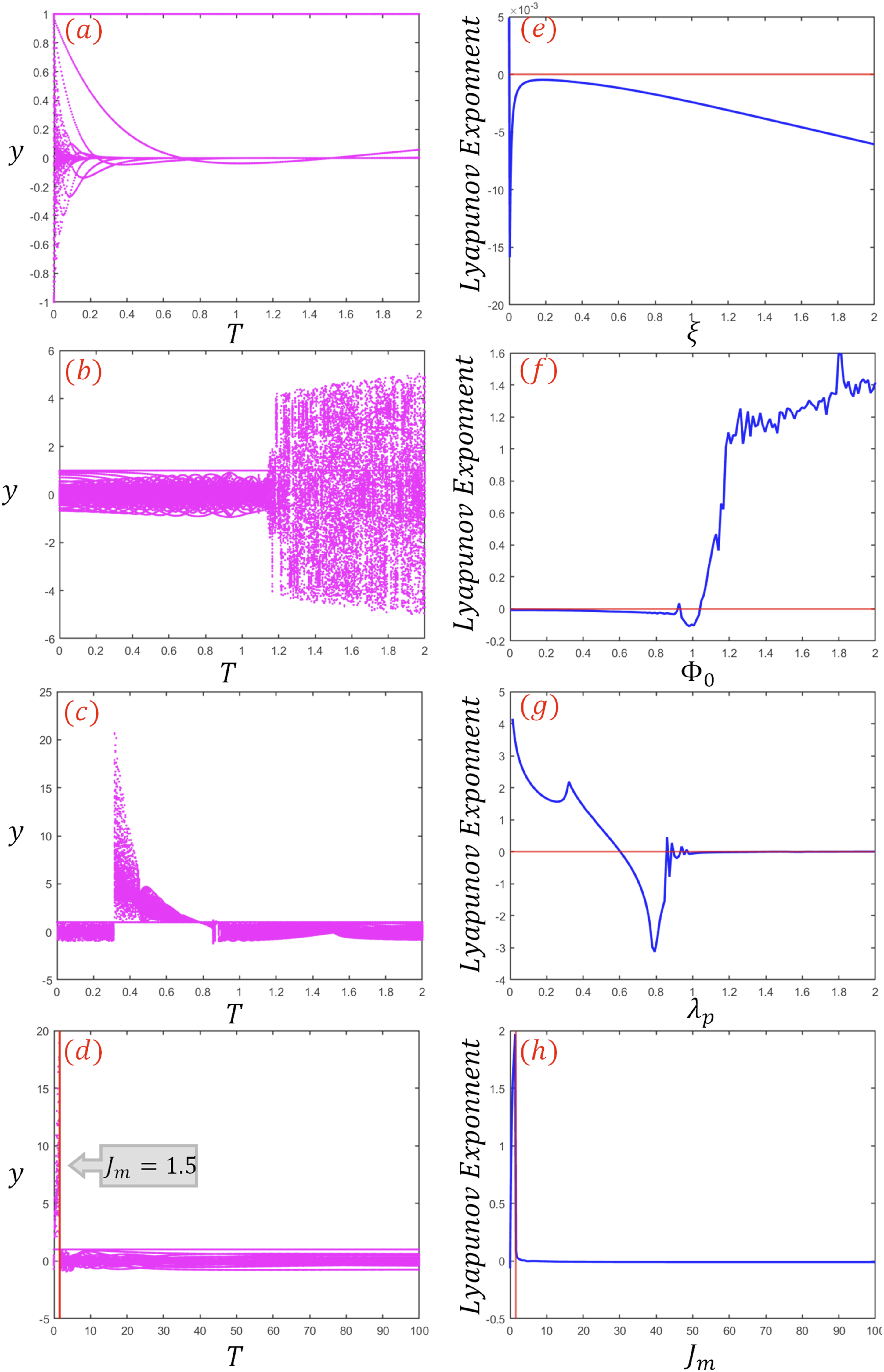
From the bifurcation of Figure 13(a), it can be seen that during the change of damping ratio in the range of 0-2, the diagram shows a multi-point distribution when the damping ratio is extremely small, reflecting the sensitive dependence on initial conditions characteristic of a near-conservative system, and then gradually tends to a single branch and reaches a stable state. At the same time, according to Figure 13(e), as the damping ratio increases, the Lyapunov exponent decreases from slightly greater than 0 to always less than 0. It should be noted that the slightly positive Lyapunov exponent observed at reflects the sensitivity to initial conditions characteristic of a conservative Hamiltonian system, rather than the presence of a strange attractor indicative of dissipative chaos. For , the system enters the overdamped regime, and the Lyapunov exponent is consistently non-positive, in agreement with the rapid convergence observed in Section 3.1. (Figure 4)
Bifurcation diagram (a-d) and Lyapunov exponent (e-h) under different damping ratio, voltage amplitude, pre-stretching, and tensile limit changes.
As the damping ratio increases, the conical PVC gel actuator transitions to stable periodic vibration and eventually to damped motion. Figure 13(b) depicts the bifurcation trend as the voltage amplitude varies within the range of 0-2. Combined with the Lyapunov exponents shown in Figure 13(f), when the voltage amplitude is in the range of , the Lyapunov exponent is always less than or equal to 0. However, when , the Lyapunov exponent becomes positive, indicating the onset of weak chaotic motion at this time. Thus, the conical PVC gel actuator remains in a stable quasi-periodic vibration within this voltage amplitude range, which corresponds to the damped periodic responses shown in Figure 7(a)–(c) for .When approaches 1.04, the Lyapunov exponent becomes positive, indicating the onset of weak chaotic motion. This transitional state aligns with the irregular time-domain response and scattered Poincaré section observed in Figure 7(d)–(f) for . For , the bifurcation diagram exhibits significant divergence, and the Lyapunov exponent remains above zero, suggesting that the conical PVC gel actuator undergoes developed chaotic vibration. This is consistent with the highly erratic responses in Figure 7(g)–(i) for .
From the bifurcation diagram of Figure 13(c), it can be seen that with the increase of the pre-stretch , the bifurcation phenomenon obviously appears when . However, through Figure 13(g), we find that the Lyapunov exponent at has a “Jump” phenomenon. Specifically, when (corresponding to the chaotic vibration in Figure 10(a)–(c)), the Lyapunov exponent is positive, confirming chaotic motion. In the process of , the conical PVC gel actuator is always in a chaotic vibration state. In the range , the Lyapunov exponent oscillates around zero, indicating state transitions between periodic and chaotic vibrations. This is consistent with the small-amplitude chaotic vibration observed in Figure 10(d)–(f) for .When , the Lyapunov exponent stabilizes at zero, and the PVC gel actuator enters a stable quasi-periodic vibration state, as demonstrated in Figure 10(g)–(i) for .
Building upon the analysis in Section 3.2, which showed that leads to chaotic behavior while yield stable damped periodic motion, we now extend the investigation to its full parameter range, including the critically small values that approach the material’s stretch limit. Figure 13(d) shows that when the tensile limit , the points in the bifurcation diagram exhibit an irregular and randomly scattered distribution. However, when is extremely small, the scattered points in the bifurcation diagram are uniformly distributed along a short vertical line. In Figure 13(h), when the Lyapunov exponent , the Lyapunov exponent diagram is generally greater than 0; yet, when is close to 0, local regions in the Lyapunov exponent diagram become less than 0. When the tensile limit , the bifurcation diagram and Lyapunov exponent diagram show that the actuator is in a stable damped periodic motion state. In summary, the influence of the tensile limit is governed by a critical threshold at .For , the system enters a chaotic regime. Within this regime, the dynamics are complex: when is moderately small (e.g., between 0 and 1.5), the Lyapunov exponent is predominantly positive, indicating chaotic vibration; however, as approaches zero, the Lyapunov exponent locally becomes negative, suggesting transient or localized stable phases amidst the overall unstable trend, which may correspond to a degraded material state prior to mechanical failure. For , which encompasses and extends beyond the representative values analyzed in Section 3.2, variations in have negligible impact, and the system maintains stable damped periodic vibrations. Thus, the conclusion in Section 3.2 that exhibits a threshold-dependent regulatory effect holds robustly within the stable operating regime , while the newly identified chaotic regime and its associated complex dynamics are confined to the sub-threshold regime .Therefore, it indicates that when , the tensile limit causes the conical structure actuator to be generally in a state of chaotic vibration; however, when is extremely small, the conical structure actuator will be in a state of locally stable vibration. When , changes in the tensile limit will not cause the actuator to undergo chaotic vibration, consistent with the energetic interpretation provided in Figure 6.
In summary, changes in damping ratio will never induce chaotic vibrations. At extremely small damping ratios, the system may exhibit quasi-periodic motion characteristic of a near-conservative system, but fully developed dissipative chaos does not occur under the examined parameter conditions. Whereas voltage amplitude and pre-stretching can, within certain ranges, trigger chaotic vibrations in PVC gel cone-structured actuators. When the tensile limit is at a relatively small value, chaotic vibrations occur; however, within the normal range (), the system maintains stable damped periodic motion, the actuator remains in a stable quasi-periodic vibration state.
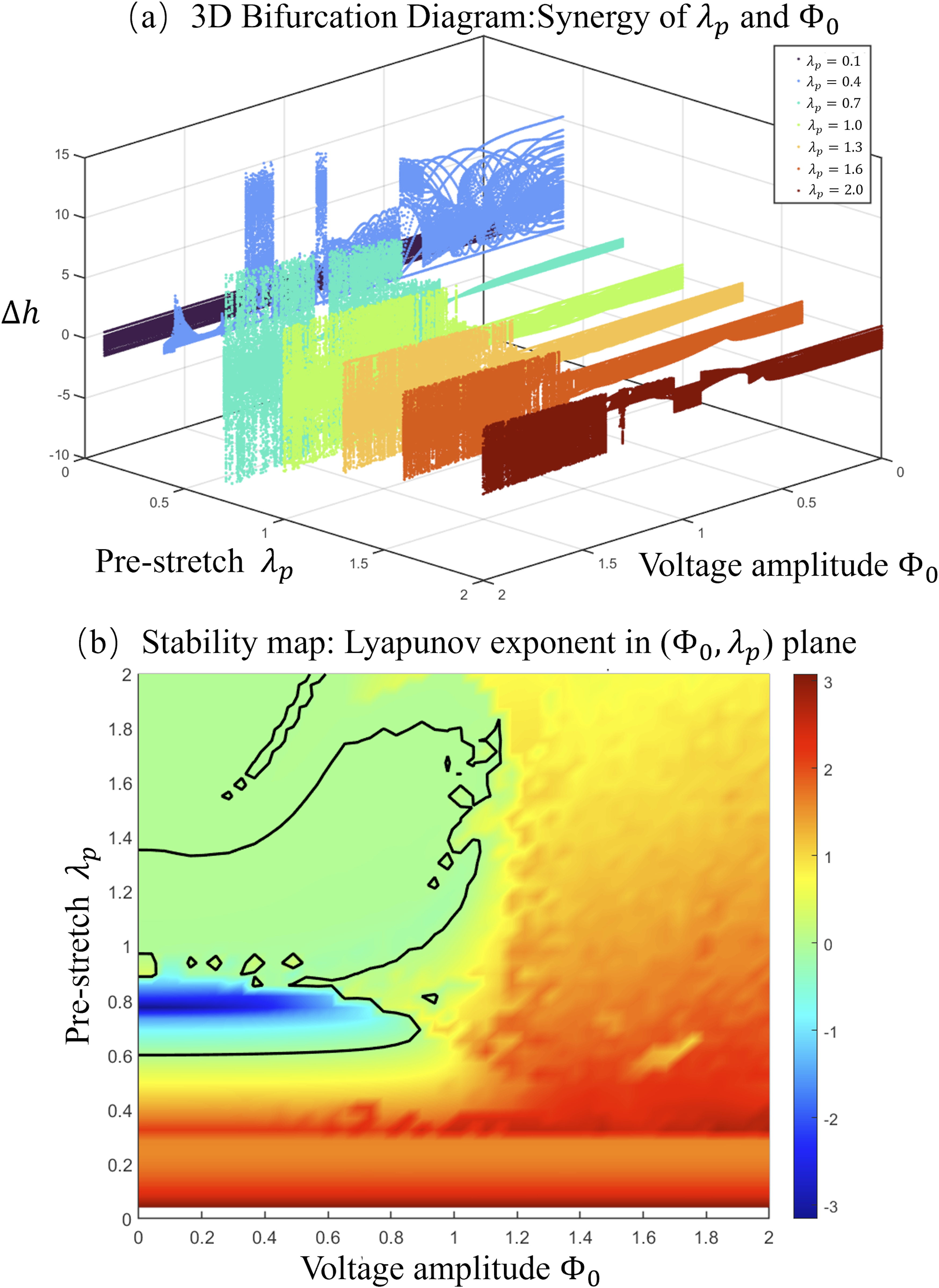
To address the synergistic influence of and on vibration stability, a two-parameter analysis was conducted. Figure 14(a) presents a three-dimensional bifurcation diagram in which Poincaré sections for seven representative values are stacked along the pre-stretch axis. This visualization directly captures the evolution of the dynamical regime: for , the Poincaré points transition from tight clusters at low to widely scattered distributions as increases, consistent with the chaotic responses identified in Figure 10(a)–(c) and the positive Lyapunov exponents in Figure 13(g) for small . For , the points remain densely clustered regardless of , in agreement with the stable damped periodic motion shown in Figure 10(g)–(i). The transition from dispersed to clustered points as increases provides direct phase-space evidence that pre-stretch suppresses voltage-induced chaos.
Three-dimensional bifurcation diagram in the plane. Colored point sets correspond to different pre-stretch ratios , illustrating the transition from periodic to chaotic motion as the voltage amplitude increases. (b) Corresponding map of the largest Lyapunov exponent, where blue indicates negative exponents (stable periodic motion) and red/yellow indicate positive exponents (chaos). Together, they reveal the combined effect of voltage amplitude and pre-stretch on system stability.
Figure 14(b) complements this picture with a quantitative stability map of the largest Lyapunov exponent. The map reveals distinct dominant mechanisms in different parameter regions. In the high-voltage regime (), the exponent is predominantly positive irrespective of , indicating voltage-dominated chaos. This is consistent with the single-parameter bifurcation in Figure 13(b), where chaos sets in at and persists thereafter. In the low pre-stretch regime (), chaos appears even at moderate voltages, confirming that small alone can destabilize the actuator, as observed in Figure 13(c) and (g). A narrow stable pocket (deep blue, ) exists around , . The closed contour encloses a transitional domain (; ) that contains this pocket and surrounding quasi-periodic zones.
Taken together, Figure 14 demonstrates that the chaotic threshold is not determined by any single parameter, but is a joint function of and . This two-parameter analysis provides a clear design guideline for stable actuator operation.
5. Conclusion
Through the Euler-Lagrange equation, we calculated the kinetic energy and potential energy of the conical PVC gel actuator. The potential energy was mainly derived from the superelastic strain energy of the PVC gel itself and the voltage potential energy generated by the external voltage. The Helmholtz free energy density and the superelastic Gent model were used to describe the superelastic strain energy change of the PVC gel. Finally, the vibration deformation control equation in the z direction was obtained.
Through the analysis of different internal factors of PVC gel cone structure actuator, the dynamic behavior characteristics under various parameters were explored. The internal factors include damping ratio and tensile limit, and the change of these two parameters is determined by the solution configuration ratio of PVC gel itself. Specifically, it is found that the damping ratio parameter may induce quasi-periodic or high-periodic vibration when it is extremely small, but with the increase of damping ratio, the vibration attenuation of the conical PVC gel actuator becomes faster, and variations in damping ratio do not induce chaotic vibration. The tensile limit exhibits a critical threshold effect. When falls below a critical value (approximately ), the actuator enters a failure regime characterized by complex and unstable dynamics. For above this threshold, its influence is negligible, ensuring stable operation. This highlights the practical necessity of maintaining above its critical value.
For external factors, voltage amplitude and pre-stretching force significantly influence the vibration of the conical PVC gel actuator, inducing mixed vibrations with distinct transition thresholds. A two-parameter stability analysis reveals that the chaotic threshold is a joint function of these two parameters: for , chaos is voltage-dominated; for , chaos is pre-stretch-dominated. Adopting ensures stable periodic motion across the entire voltage range. In contrast, changes in spring stiffness only alter the vibration frequency without affecting stability or periodicity. In summary, external mechanical forces and voltage exert a far greater influence on the actuator’s vibration than internal parameters of the PVC gel itself.
Therefore, appropriate external excitation conditions should be selected for stable actuation, and the identified critical thresholds provide direct guidelines for the design and safe operation of conical PVC gel actuators.
Footnotes
ORCID iD
Bin Luo
Funding
The authors acknowledge the financial support from the National Natural Science Foundation of China (Grant No. 91648110), the Hunan Provincial Natural Science Foundation Project (Grant No. 2024JJ7490), Key Project of Hunan Provincial Department of Education (Grant No. 25A0555), and National Undergraduate Innovation Training Program (Grant No. S202410547010, S202310547004)
Declaration of conflicting interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Data Availability Statement
The data that support the findings of this study are available from the corresponding authors upon reasonable request.*
References
1.
AcharyaRDuttaSDPatilTV, et al. (2023) A review on electroactive polymer–metal composites: development and applications for tissue regeneration. Journal of Functional Biomaterials14(10): 523. https://doi.org/10.3390/jfb14100523
2.
DongCZhuZLiZ, et al. (2022) Design of fishtail structure based on oscillating mechanisms using PVC gel actuators. Sensors and Actuators A: Physical341: 113588. https://doi.org/10.1016/j.sna.2022.113588
3.
DuZLuoBZhuK (2024) Study on deformation theory and resonance frequency of circular-plane PVC actuator. Journal of Physics D: Applied Physics57(6): 065401. https://doi.org/10.1088/1361-6463/ad098b
4.
FangSZhangXFanJ, et al. (2026) A high-output dynamic bistable electromagnetic energy harvester for ultra-low-frequency rotational excitations. Mechanical Systems and Signal Processing246: 113925. https://doi.org/10.1016/j.ymssp.2026.113925
5.
GentAN (1996) A new constitutive relation for rubber. Rubber Chemistry and Technology69(1): 59–61. https://doi.org/10.5254/1.3538357
HuangX (2024) Exploiting multi-stiffness combination inspired absorbers for simultaneous energy harvesting and vibration mitigation. Applied Energy364: 123124. https://doi.org/10.1016/j.apenergy.2024.123124
8.
HuangXYangB (2021) Investigation on the energy trapping and conversion performances of a multi-stable vibration absorber. Mechanical Systems and Signal Processing160: 107938. https://doi.org/10.1016/j.ymssp.2021.107938
9.
HuangXYangB (2023) Towards novel energy shunt inspired vibration suppression techniques: principles, designs and applications. Mechanical Systems and Signal Processing182: 109496. https://doi.org/10.1016/j.ymssp.2022.109496
10.
HuangXZhongT (2023) Hydrokinetic energy harvesting from flow-induced vibration of a hollow cylinder attached with a bi-stable energy harvester. Energy Conversion and Management278: 116718. https://doi.org/10.1016/j.enconman.2023.116718
11.
HuangJZhangXLiuR, et al. (2023) Polyvinyl chloride-based dielectric elastomer with high permittivity and low viscoelasticity for actuation and sensing. Nature Communications14(1): 1483. https://doi.org/10.1038/s41467-023-37178-5
12.
HuangXHuaXChenZ (2024) Exploiting a novel magnetoelastic tunable bi-stable energy converter for vibration energy mitigation. Nonlinear Dynamics112(6): 2017–2041. https://doi.org/10.1007/s11071-024-10337-z
13.
HuangXWangBHuangZ, et al. (2025) A theoretical model for a low-frequency two-stage hybrid vibration isolator with a nonlinear energy sink and a negative stiffness spring. Applied Mathematical Modelling142: 115948. https://doi.org/10.1016/j.apm.2025.115948
14.
IrfanMAliIAliA, et al. (2023) Analysis of the performance of a gel actuator made of plasticized polyvinyl chloride/carboxylated cellulose nanocrystals. ACS Omega8(20): 17976–17982. https://doi.org/10.1021/acsomega.3c01172
15.
LeiJXuMLiuT, et al. (2020) Compressive mechanical behavior and constitutive model of polyvinyl chloride elastomer under dynamic loading. AIP Advances10(7): 075315. https://doi.org/10.1063/5.0004663
16.
LiYSunBFengX, et al. (2021) A novel electroactive plasticized polymer actuator based on chlorinated polyvinyl chloride gel. RSC Advances11(58): 36439–36449. https://doi.org/10.1039/d1ra07245e
17.
LiYFengXZhuL, et al. (2023) Modeling of fiber-constrained planar PVC gel actuators. Nanomaterials13(9): 1483. https://doi.org/10.3390/nano13091483
18.
LiuCZhangK (2024) A wearable finger tremor-suppression orthosis using the PVC gel linear actuator. IEEE Robotics and Automation Letters9(5): 3854–3861. https://doi.org/10.1109/lra.2024.3369492
19.
LuoBXiaoYChenZG, et al. (2024) Emergence of chaos in an electroactive artificial muscle PVC gel under state-varying electromechanical parameters. Chaos, Solitons & Fractals186: 115319. https://doi.org/10.1016/j.chaos.2024.115319
20.
MehraeenSAsadiMMartinezJG, et al. (2023) Effect of core yarn on linear actuation of electroactive polymer coated yarn actuators. Advanced Materials Technologies8(18): 2300460. https://doi.org/10.1002/admt.202300460
21.
MotohashiTOgawaNAkaiH, et al. (2022) Peristaltic micropump using polyvinyl chloride gels with micropatterned surface. Scientific Reports12(1): 22608. https://doi.org/10.1038/s41598-022-27226-3
22.
NeubauerJChoHJKimKJ (2022) ‘Tunable polyvinyl chloride (PVC) and thermoplastic polyurethane (TPU)-Based soft polymer gel sensors. Smart Materials and Structures31(11): 115025. https://doi.org/10.1088/1361-665x/ac9a8f
23.
NeubauerJOlsenZJFrankZ, et al. (2022) A study of mechanoelectrical transduction behavior in polyvinyl chloride (PVC) gel as smart sensors. Smart Materials and Structures31(1): 015010. https://doi.org/10.1088/1361-665x/ac358f
24.
ShinEJParkWHKimSY (2018) Fabrication of a high-performance bending actuator made with a PVC gel. Applied Sciences8(8): 1284. https://doi.org/10.3390/app8081284
25.
SiekierkaPMakarewiczEWilczewskiS, et al. (2023) Composite of Poly(Vinyl chloride) plastisol and wood flour as a potential coating material. Coatings13(11): 1892. https://doi.org/10.3390/coatings13111892
26.
TangNLeiDLinJ, et al. (2021) Modeling the damage and self-healing behaviors of plasticized PVC gels. Acta Mechanica Solida Sinica34(4): 1–11. https://doi.org/10.1007/s10338-021-00238-8
WuYYuMTianC, et al. (2024) Enhanced performance of electro-responsive PVC gel actuators-prepared by advanced rapid thermal melting technique. Sensors and Actuators, B: Chemical401: 134945. https://doi.org/10.1016/j.snb.2023.134945
ZhangMJakobsenJLiR, et al. (2023) Investigation of a simple viscoelastic model for a PVC-Gel actuator under combined mechanical and electrical loading. Materials16(3): 1183. https://doi.org/10.3390/ma16031183
31.
ZhangXHuangXWangB (2024) A quad-stable nonlinear piezoelectric energy harvester with piecewise stiffness for broadband energy harvesting. Nonlinear Dynamics112(22): 19633–19652. https://doi.org/10.1007/s11071-024-10077-0