
Abstract
During operation, high-speed elevators experience significant longitudinal vibrations in their car systems due to variations in shaftway conditions and system parameter uncertainties, affecting ride comfort and safety. Existing active control methods often rely on absolute motion measurements, leading to high sensor costs and practical constraints. To address this issue, this study proposes an active control strategy based on Interconnection and Damping Assignment Passivity-Based Control (IDA-PBC), using only relative displacement and velocity feedback. A seven-degree-of-freedom longitudinal vibration model of the nonlinear high-speed elevator car system is first established. Then, based on the Port-Hamiltonian (PH) principle and relative-state reconstruction, the PH form of the car system is constructed. Through energy shaping and damping injection, the IDA-PBC controller transforms the original nonlinear system into a linear system with ideal damping performance, and the final control law depends only on the relative displacement and velocity of the car system. Conditions for global asymptotic stability are derived, and parameter selection criteria are proposed to enhance robustness against model parameter uncertainties. Comparative simulations with passive, Skyhook, and PID control are conducted under random excitation and emergency braking, and parameter sweep simulations are performed by varying key mass, stiffness, and damping parameters within ± 20% of their nominal values. The results show that the proposed method reduces the typical longitudinal vibration acceleration by more than 60% in the considered simulation cases, while the vibration responses remain bounded under the tested parameter variations. This study provides a theoretical and numerical basis for further developing active longitudinal vibration control strategies for high-speed elevators.
Keywords
1. Introduction
In recent years, the rapid progress of global urbanization and the continuous expansion of high-rise/ultra-high-rise buildings have put forward more stringent requirements for vertical transport systems (Elmqvist et al., 2019). As building height records continue to be set, elevator systems are moving towards higher operating speeds. However, the increasing speed of high-speed lifts has led to a growing problem of longitudinal vibration in the car system. In the process of high-speed lift operation, affected by the complex and variable shaft environment and the uncertainty of system parameters (Yang et al., 2025; Zeng et al., 2024a, 2024b), the micro-amplitude vibration of the car system in the process of operation presents non-linear amplification characteristics. Its strong non-linearity and multi-disturbance coupling characteristics will not only affect the ride comfort but also may cause fatigue damage to key components, which will adversely affect the operational safety and service life of the equipment (Peng et al., 2020). Although existing multi-degree-of-freedom dynamic models can partly describe system vibration behavior, they often fail to clearly reveal subsystem interconnection mechanisms, internal energy structures, and nonlinear interactions. As a result, controllers based on these models may lack clear physical interpretation and have difficulty handling complex multi-factor coupling. Moreover, many existing control strategies show inadequate robustness to unknown disturbances and insufficient consideration of control energy consumption. Therefore, constructing a more practical nonlinear longitudinal vibration model and developing active control methods for high-speed elevator car systems remain urgent problems.
To address the problem of modeling the longitudinal vibration dynamics of the high-speed elevator car system, scholars at home and abroad have conducted a large number of studies. Crespo et al. (2018) established a comprehensive mathematical model of a high-rise elevator system considering the lateral stiffness of the combination of roller guideway and guideway, revealing a series of nonlinear dynamic interactions between the components of the elevator system. Tian et al. (2024) used a substructure dynamics modeling approach incorporating Newton’s laws and Lagrange’s equations to construct a dynamics model for a high-speed lift and also developed a nonlinear dynamics model for a wire rope using the concentrated mass method. Hou et al. (2017) developed a discrete distribution parameter model for the longitudinal vibration of high-speed lifts based on the mechanism of wire rope elastic modulus on the comfort of high-speed lift hoisting systems. Li et al. (2019) developed a seven-degree-of-freedom differential equation for a high-speed traction elevator by the Lagrangian method. Qin and Yang (2021) developed a 17-degree-of-freedom dynamic model of the horizontal vibration of an ultra-high-speed elevator based on the time-varying characteristics of the contact stiffness. Although these studies have advanced elevator vibration modeling, most models are mainly formulated as dynamic equations for response prediction. The energy-based coupling structure of the car system is still not explicitly represented, especially for the interaction among the car, car frame, rope–sheave transmission, and active suspension. In addition, the relative-state characteristics of the car system have not been sufficiently incorporated into the modeling process. Therefore, a modeling framework that can reveal the internal physical structure of the high-speed elevator car system while accommodating relative-state information is still required.
For the problem of vibration control strategy of high-speed elevator car systems, scholars have carried out relevant research. Zhao et al. (2024) proposed an adaptive integral terminal sliding mode control strategy based on a neural network to deal with the input saturation nonlinearity by introducing a smooth function to model an 8-degree-of-freedom asymmetric anti-saturation nonlinear system and proved the stability of the system using Lyapunov theory. Qiu et al. (2024) proposed an adaptive inverse optimal output feedback control scheme using a fuzzy observer. This method uses a fuzzy logic system to approximate the nonlinear dynamic model, while constructing an auxiliary system model and using a designed fuzzy state observer to estimate unobservable state variables. Ge et al. (2025) developed a four-level parallel NADR master control system using the fal function. Through adaptive algorithms, the fuzzy rule parameters and sliding mode switching term coefficients are dynamically adjusted to ensure the stability and adaptability of the system. Zhang et al. (2025) designed a semi-active control method based on EMPC, which combines a multi-parameter planning technique with multivariate coupling to optimize multiple inputs and reduce the system error under multiple constraints. He et al. (2022) developed a Takagi-Sugeno (TS) model for horizontal vibration control of an elevator car system and designed an adaptive sliding mode controller. Existing control methods have achieved certain effectiveness in suppressing elevator vibrations, but many still focus on algorithm-level disturbance compensation and response regulation. In these frameworks, the energy exchange mechanism and interconnection structure of the longitudinal car system are usually not directly incorporated into controller design, while dependence on absolute-state information or additional estimation may increase implementation complexity. Therefore, a relative-state feedback control strategy based on energy shaping and damping injection is still needed for longitudinal vibration suppression of high-speed elevator car systems.
In recent years, IDA-PBC, as a nonlinear control method based on energy shaping, has expanded its application domains from traditional motor and robotic systems to more complex energy conversion fields, demonstrating significant application potential. R. Ortega et al. (2002a,2002b) proposed the IDA-PBC method for PH systems. Ryalat and Laila (2018) proposed a robust IDA-PBC method that provides a new framework to deal with uncertainty in underdriven mechanical systems through integral control and input state stabilization control to improve system robustness and stability. Franco (2019) proposed an adaptive IDA-PBC method for dealing with constant perturbations in underdriven mechanical systems, which effectively improves the robustness and stability of the system by adding a new perturbation compensation term and adaptive estimation. Aoki et al. (2016) proposed a feedback control method for vibration suppression without absolute displacement and velocity information based on the IDA-PBC method. (Belkhier and Achour, 2021, 2021b, 2022) proposed and validated a series of passivity-based control (PBC) methods to address nonlinear control challenges in permanent magnet synchronous generators. They demonstrated the effectiveness of PBC in handling nonlinearity and achieving robust performance in energy conversion systems from the perspectives of voltage, current, and speed. Furthermore, an enhanced IDA-PBC strategy (Belkhier Y et al., 2025) was proposed. This approach integrates a nonlinear observer with a high-order sliding mode controller and employs a genetic algorithm for parameter optimization. This strategy significantly improves the tracking accuracy and robust performance of permanent magnet synchronous generators under various operating conditions. These studies show that IDA-PBC can handle nonlinear systems, external disturbances, and parameter perturbations through energy shaping and damping injection. However, existing IDA-PBC studies mainly focus on electromechanical energy-conversion systems or low-order vibration-control structures. For high-speed elevator car systems, longitudinal vibration is transmitted through the hoisting system, and the relative motion among components is closely related to the car vibration response. Therefore, combining IDA-PBC with the relative-state description of the elevator hoisting system remains worthy of further study, so that the PH model can reflect coupled vibration dynamics and the final control law can be expressed using relative displacement and velocity.
Based on the above analysis, a seven-degree-of-freedom nonlinear longitudinal vibration model is constructed for the longitudinal vibration of high-speed elevators, and an active controller for longitudinal vibration of high-speed elevator car systems based on IDA-PBC is proposed, which realizes the active suppression of longitudinal vibration of elevator car systems. The main contributions of this paper are as follows: 1. A relative-state PH modeling framework is established for the nonlinear longitudinal vibration of the high-speed elevator car system. Starting from the Euler–Lagrange equations, the system states are reconstructed using relative displacement and velocity information, and the PH form is constructed to describe the energy storage, interconnection, and damping structure of the coupled hoisting dynamics, providing an energy-structure basis for controller design. 2. An IDA-PBC controller is derived based on the relative-state PH model. By constructing a desired car system and performing energy shaping, damping injection, and dynamic matching, the nonlinear car dynamics are transformed into a desired linear system with assigned damping characteristics. Through re-expressing the momentum term and eliminating the disturbance-related component, the final control law depends only on the relative displacement and velocity of the car system. 3. Stability conditions, parameter selection criteria, and simulation evaluations are provided. The global asymptotic stability of the zero-disturbance closed-loop system is proven using the desired Hamiltonian function. A sensitivity-based parameter selection criterion is established to reduce the influence of model parameter uncertainties on the control law. Comparative simulations under random excitation and emergency braking, together with parameter sweep analysis under ± 20% variations of key parameters, show the vibration-suppression effectiveness of the proposed controller and provide additional support for its robustness against model parameter uncertainties.
2. Modeling of active control of longitudinal vibration of hoisting system
2.1. Longitudinal vibration model description of nonlinear hoisting system
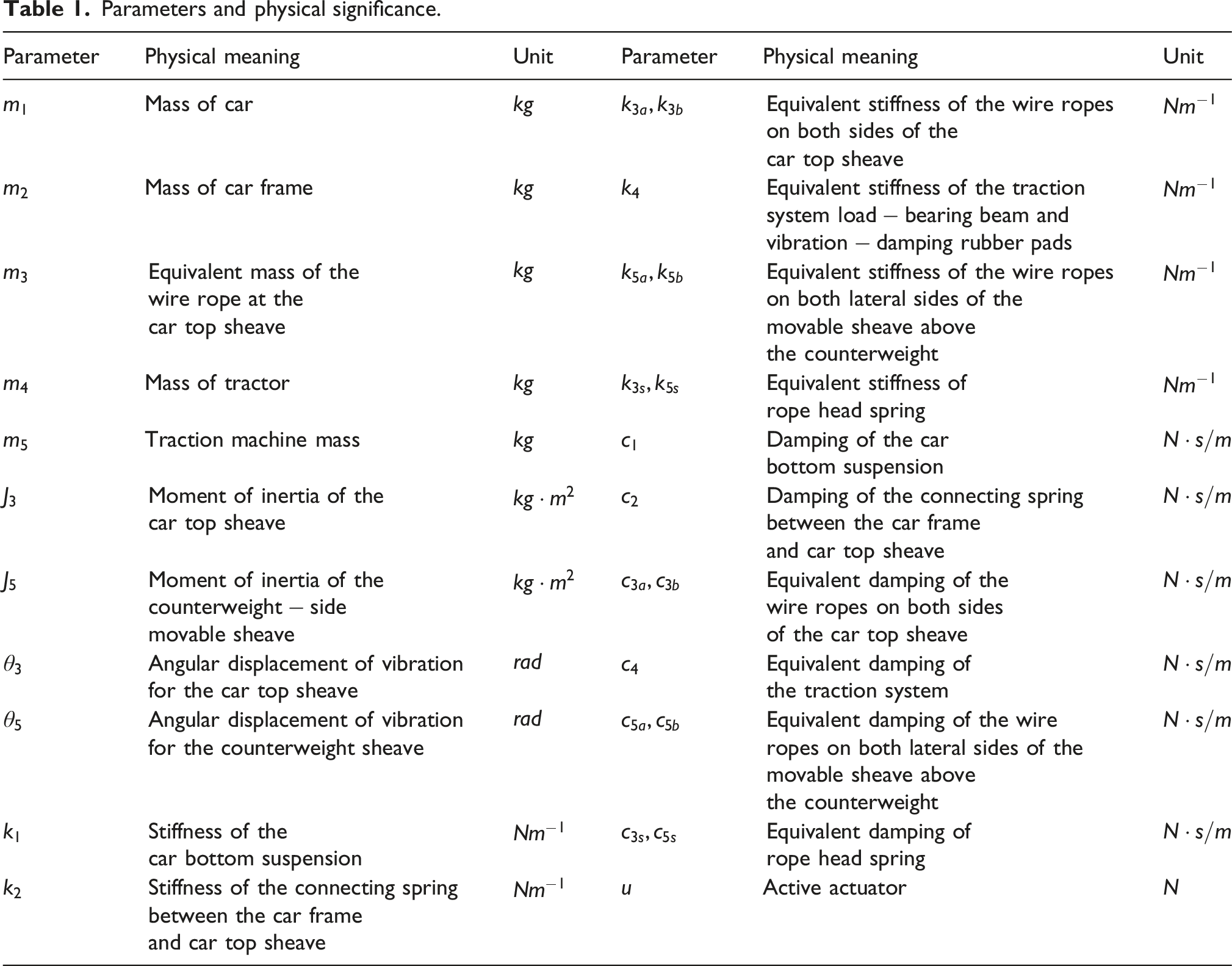
The high-speed elevator hoisting system mainly consists of a traction system, counterweight system, car system, and active control system. According to its structure, an active suspension system with springs, dampers, and actuators is arranged between the car and car frame. A 7-degree-of-freedom nonlinear active longitudinal vibration model is established, as shown in Figure 1, and the corresponding parameters and physical meanings are listed in Table 1. Longitudinal vibration analysis model of 7-DOF high-speed elevator hoisting system. Parameters and physical significance.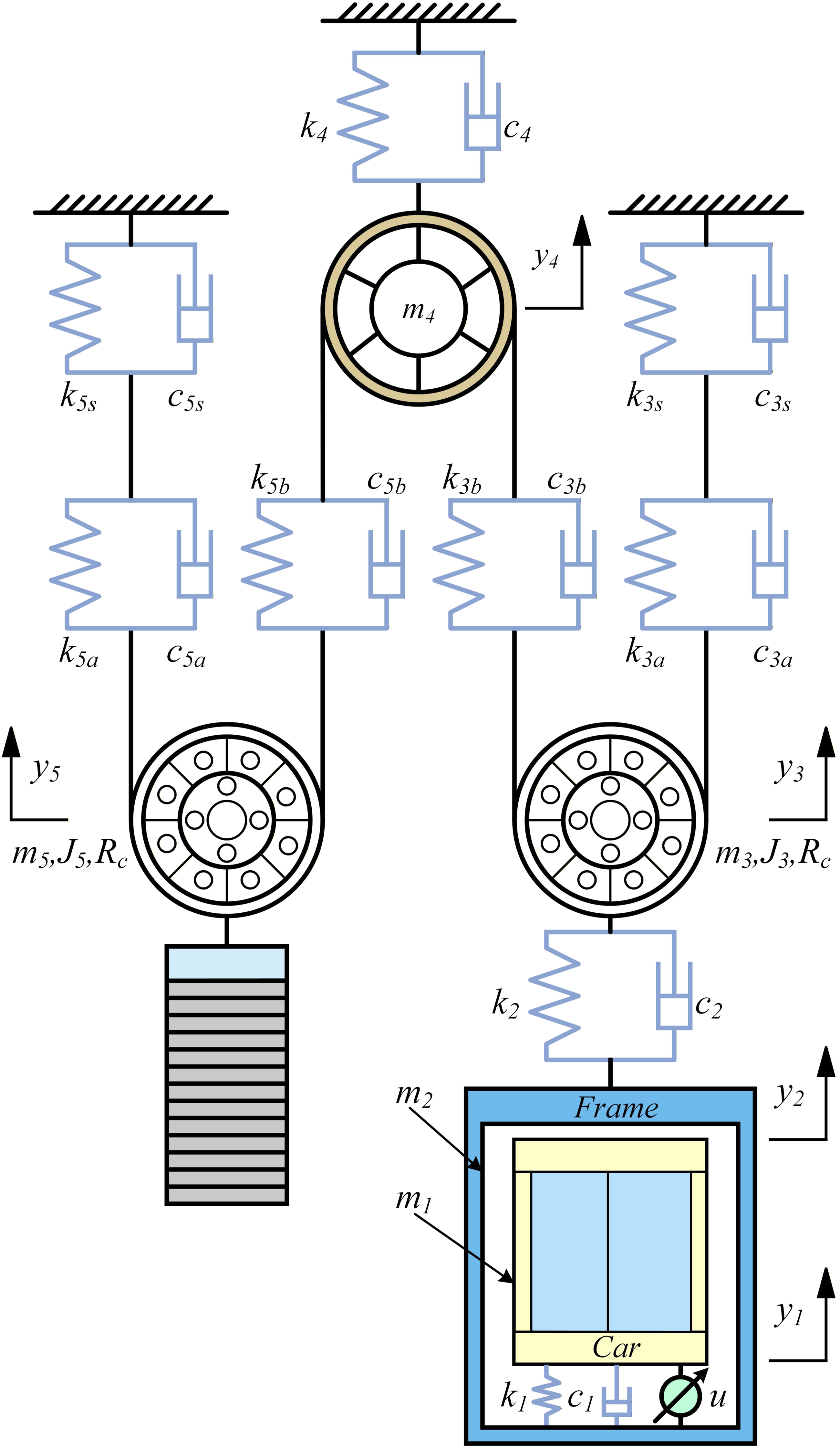
During elevator operation, the concentrated mass method is employed to evenly distribute the weight of the steel ropes to critical components such as the pulley at the top of the elevator shaft and the traction machine, assuming no relative slippage occurs between the steel ropes and the traction machine while maintaining a constant rotational speed of the traction machine.
The damping coefficients for each part of the elastic link in the system are calculated according to equation
2.2 Establishment of the dynamic equations of the hoisting system
Based on rigid body dynamics principles and combined with Lagrange energy analysis methods, the differential equation expression for the vibration of this mechanical system can be derived as follows
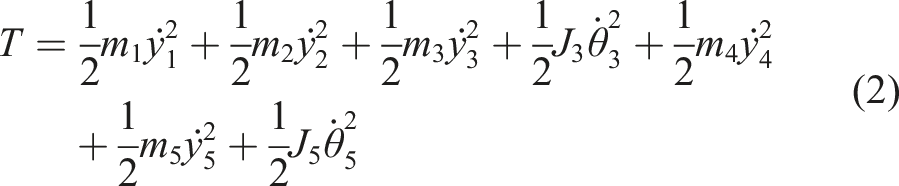
Potential energy of the system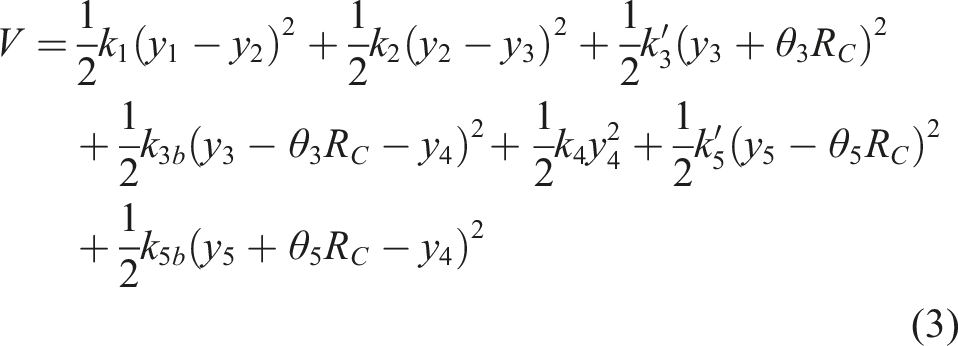
Dissipation function of the system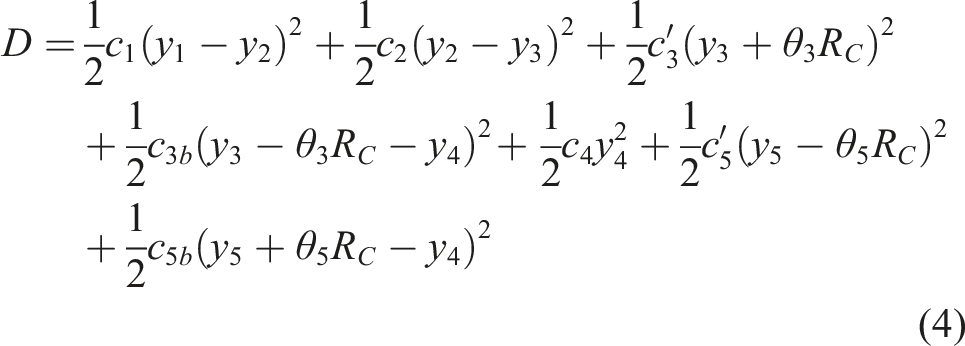
According to Eqs. (2)–(5), the system dynamics equations are obtained as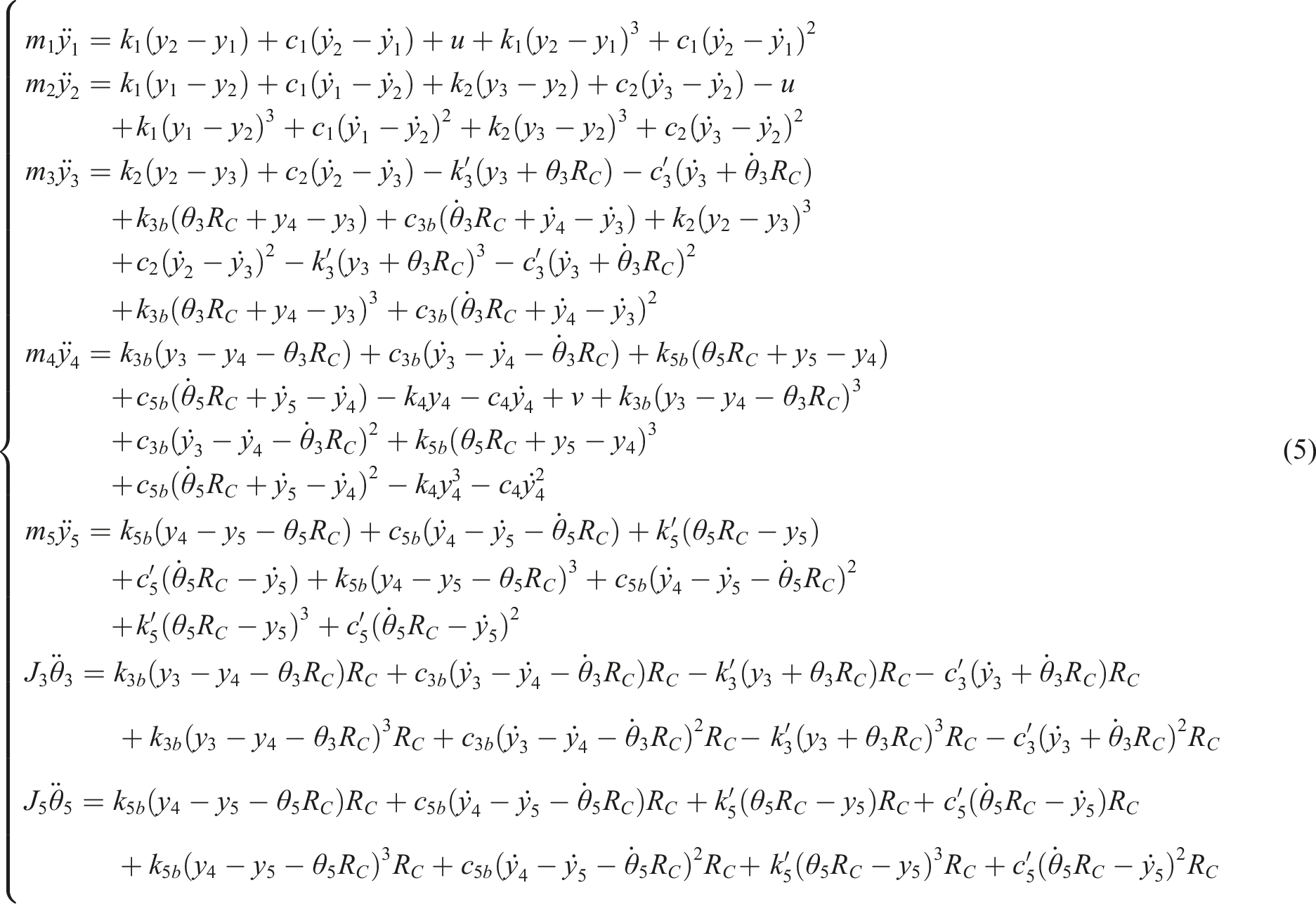
2.3. Establishment of the PH form of the hoisting system
The IDA-PBC method uses the PH model to represent the system, with the Hamiltonian function representing the total stored energy. Within the PH framework, energy exchange is represented by the interconnection and damping matrices. The closed-loop system designed via energy shaping aims to preserve the Hamiltonian structure in terms of these matrices. The dynamics of such PH systems are generally expressed as follows

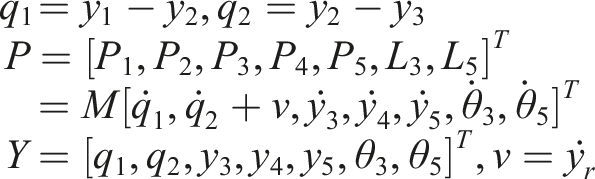
Define the state vector

At this point the PH model of the hoisting system can be expressed as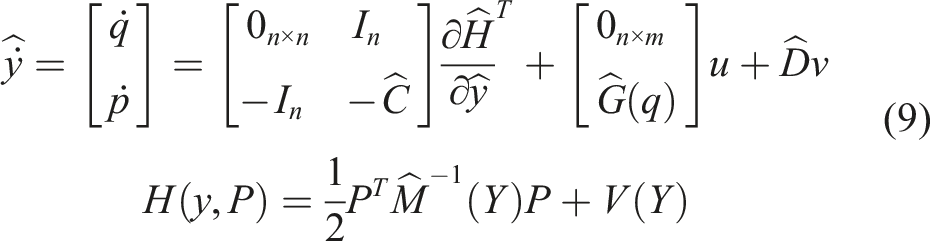
In addition, the displacement state of the car system is only in relative terms, which means the derived control law is only in terms of relative information. Therefore, redefine the state vector a
The PH system can be represented as
3. Design of car system controller based on IDA-PBC methodology
This section discusses the suppression of longitudinal vibration in the car system (6) when subjected to external interference and other uncertainties. To ensure stable system operation under these conditions, an IDA-PBC controller is proposed. The controller design uses relative displacement Block diagram of the IDA-PBC method.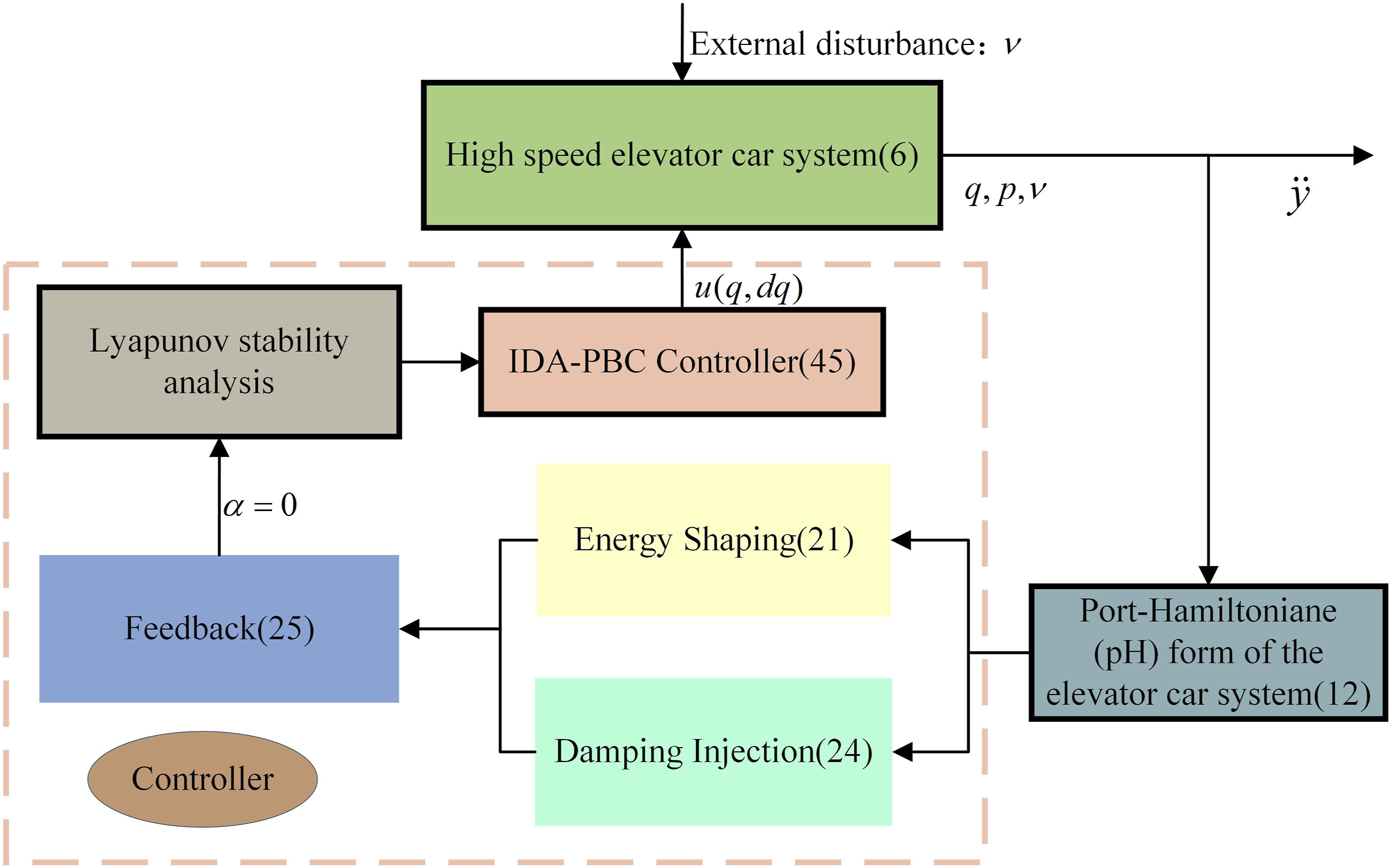
3.1. Car system IDA-PBC controller
The basic steps of the IDA-PBC methodology are twofold: (1) Energy shaping: according to the desired equilibrium point 
3.1.1. Construction of the desired car system
The IDA-PBC control strategy described in Section 2 implements system reconstruction through the PH framework. Its core idea is to transform the original nonlinear car dynamics model into a desired linear system with ideal vibration suppression performance. To achieve this transformation, this method uses virtual elastic elements and dissipative elements to construct the target dynamics and introduces coupling terms to eliminate mass ratio constraints. Figure 3 shows a schematic diagram of the desired car structure. Desired car system.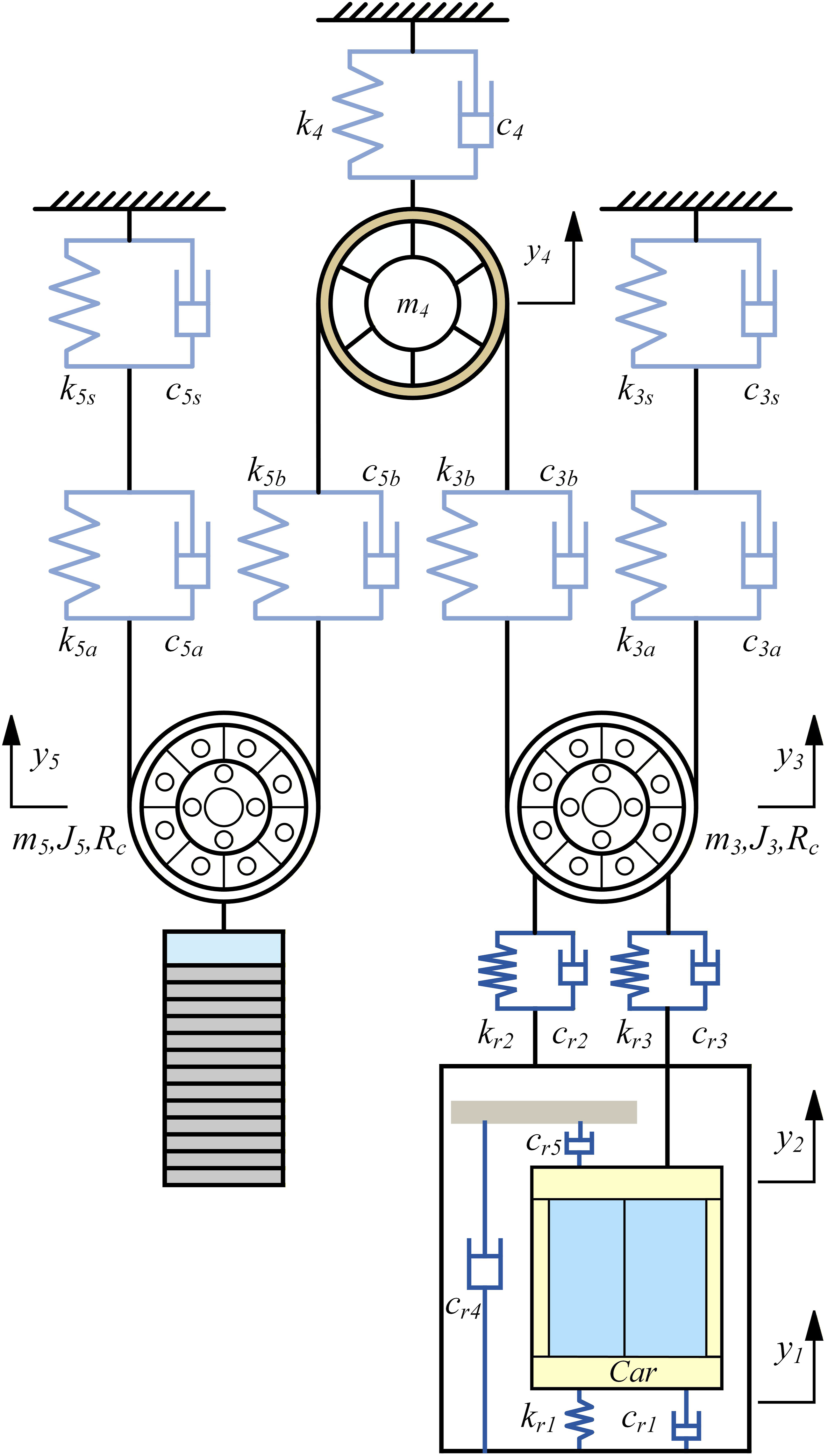
3.1.2. Energy shaping of the car system
The desired car system is matched to the controlled system, at which point the desired car system is as follows

The main concept of IDA-PBC is to design a desired system with a new interconnection matrix and a new energy function, where the car system can satisfy the following energy shaping equation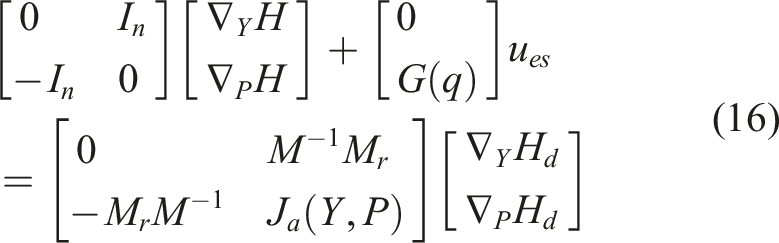
For illustrative purposes, the mass ratio of the desired car system to the original system is defined
Desired potential energy of the desired car system

In summary, the energy shaping 
3.1.3. Damping injection in the car system
Based on the mathematical relationship between Equations (15) and (17), this study optimized the design of the dissipation matrix and disturbance parameters of the target system. Under the control strategy (14), the system dynamics can be expressed as follows
The damping matrix 
In summary, the damping injection 
According to equation (14)
3.2. Matching of the dynamic conditions of the car system
By expecting the dynamics of the car system to be matched with the dynamics of the controlled system, an expression for the feedback law that expects the system parameters to have equal constraints and unequal constraints can be derived as
One can decompose (25) into the following equation
Choosing 
Bringing Equation (28) with 


Summarizing, we can obtain 
3.3. Stability analysis under zero-disturbance state
By constructing the desired Hamiltonian function as a Lyapunov function, the IDA-PBC control strategy can ensure the asymptotic stability of the system.
Theorem 1. When the system satisfies the following constraints, the zero-disturbance system origin described by equation (12) exhibits global asymptotic stability at its equilibrium point

If 
From (35) we have
The time derivation of the required Hamiltonian function 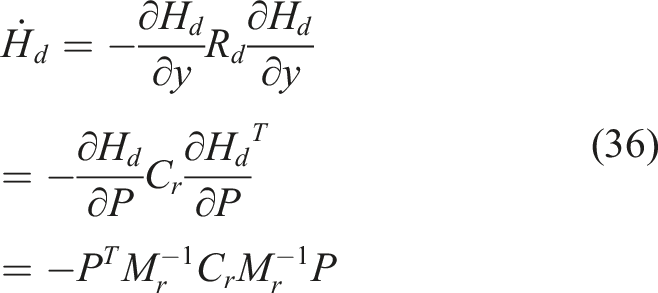
For 

At this point, 

According to the SH theorem (Chen et al., 2024), increasing the damping term 
In summary, the storage function
When determining the parameters of the target system, it is necessary to ensure that all variables comply with specific equation constraints. These constraints can be uniformly expressed as follows
From Eqs. (42) and (43), 11 parameters need to be designed for the desired system. Therefore, we choose 
The system in Eq (12). is converted to the desired system in (15) with the equation constraint (43). If equation (33) holds, the origin of the zero perturbation controlled system is globally asymptotically stable.
3.4. Design of parameter selection criteria
Temperature, humidity, passenger numbers, wear and tear on steel cables, and aging of the suspension system all cause uncertainties that have a significant impact on the robust stability of the system. In this study, the following parameters were designed to evaluate the robust stability of parameter uncertainties
And from Eq. (45), the control law 
To ensure the robust stability of the control system, a method for assessing the impact of parameter uncertainty on controller sensitivity is adopted. The defined sensitivity index should theoretically approach zero. The sensitivity index is shown below


A sufficient condition for equation (48) is

A sufficient condition for equation (49) is
A sufficient condition for equation (50) is
Given the selected free parameter
The core objective of this study is to reduce the longitudinal vibration acceleration 
It can be observed that the choice of
4. Numerical simulation and result analysis
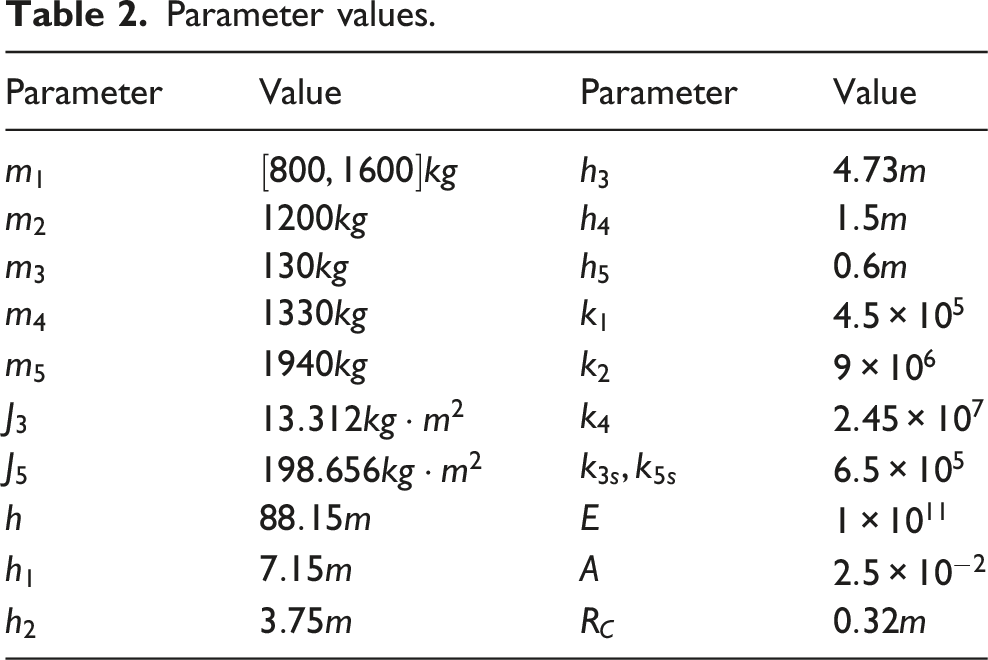
In order to numerically evaluate the effectiveness of the proposed control method and to comprehensively understand the performance of the system under different external perturbations, a numerical comparative analysis of the longitudinal vibration control effect of the car system under random excitation and emergency braking (Peng et al., 2022; Qin and Yang, 2021) is carried out under the same working conditions, with a 4 m/s high-speed elevator as the simulation object. The proposed control strategy is compared with passive, Skyhook, and PID control through numerical simulations. Therefore, the results presented in this section are numerical simulation results obtained under the considered operating conditions. Typical numerical simulation results of longitudinal vibration of the car hoisting system under different operating conditions are shown in Figure 4–11. The structural parameters of the car system are shown in Table 2. Acceleration time–frequency response -no-load. Velocity time–frequency response -no-load. Acceleration time–frequency response -full-load. Velocity time–frequency response -full load. Acceleration time–frequency response-no-load. Velocity time–frequency response-no-load. Acceleration time–frequency response-full-load. Velocity time–frequency response-full-load. Parameter values.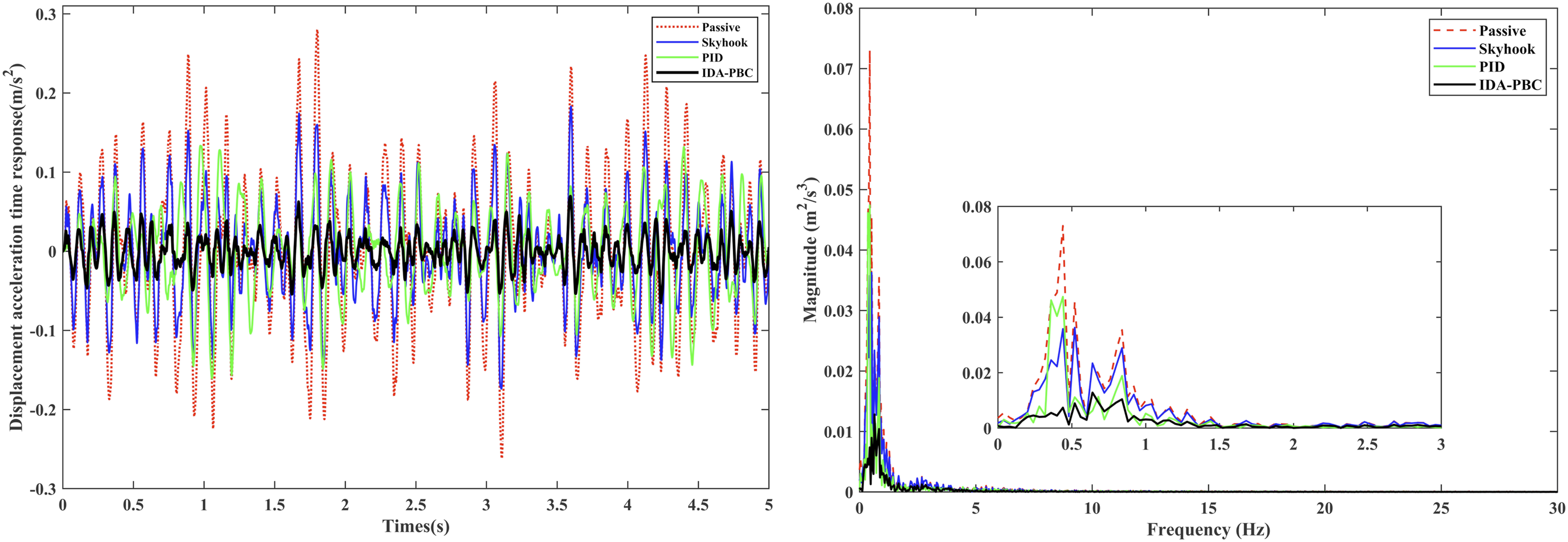
Where the Skyhook control law can be described as
4.1. Numerical simulation and analysis of longitudinal vibration of the car system under random excitation and emergency braking
4.1.1 Numerical simulation
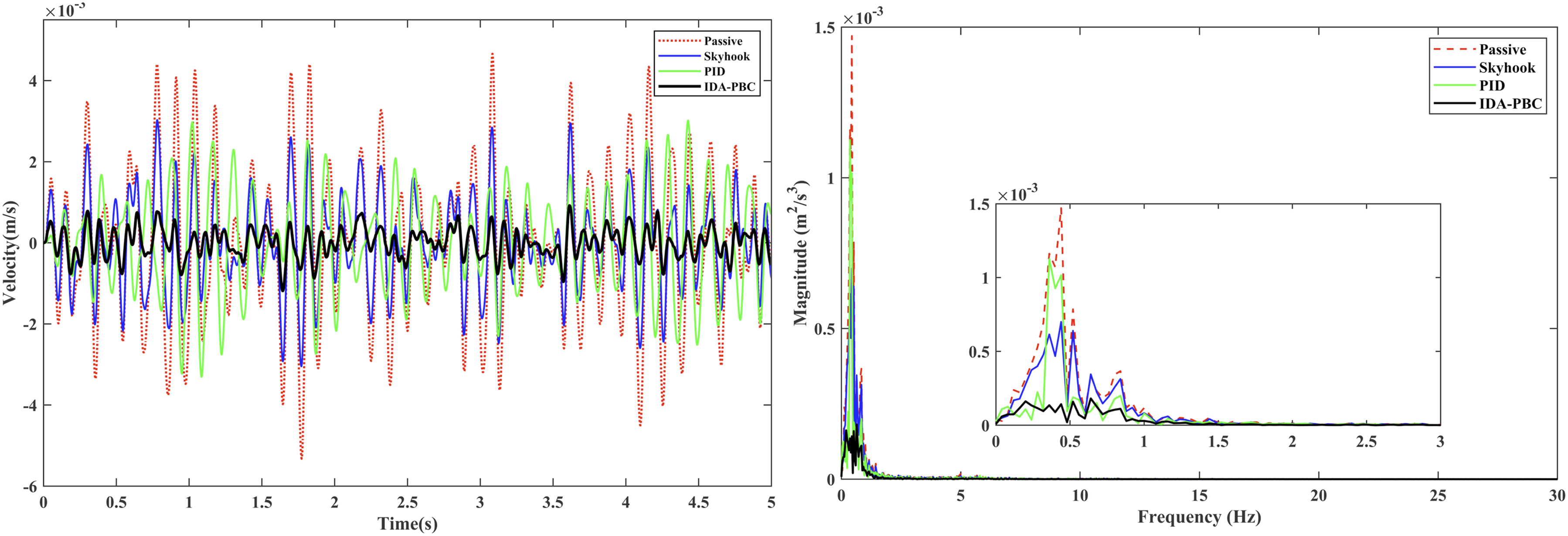
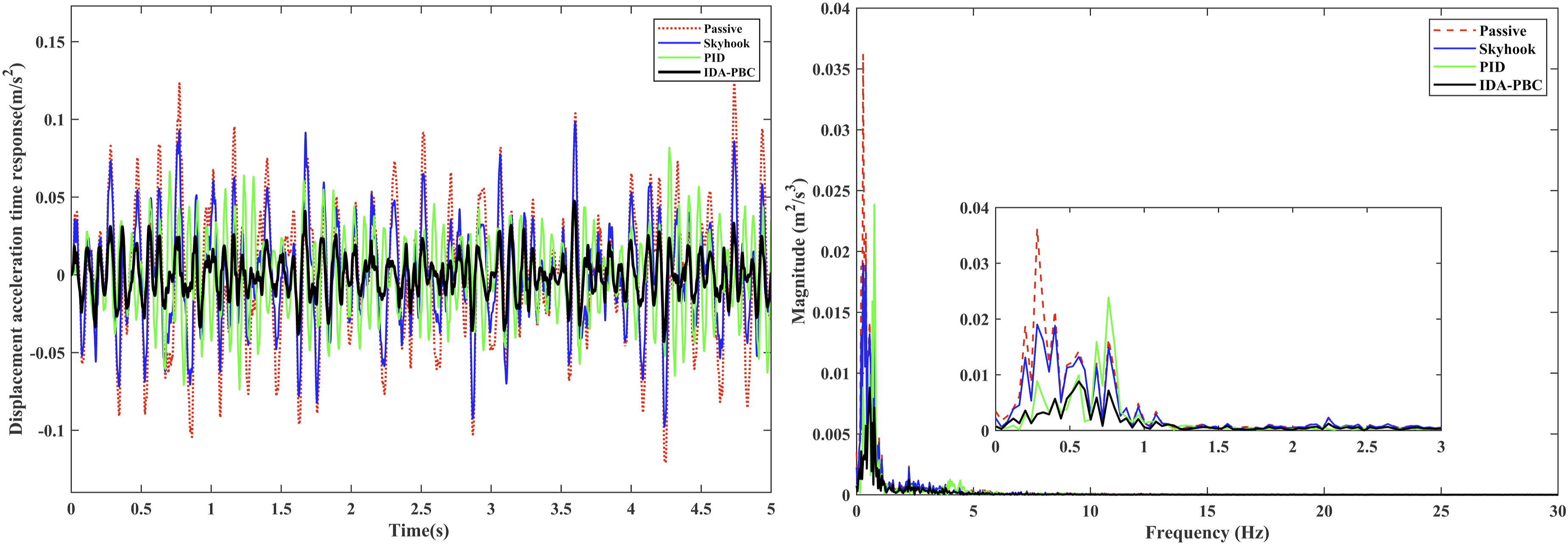
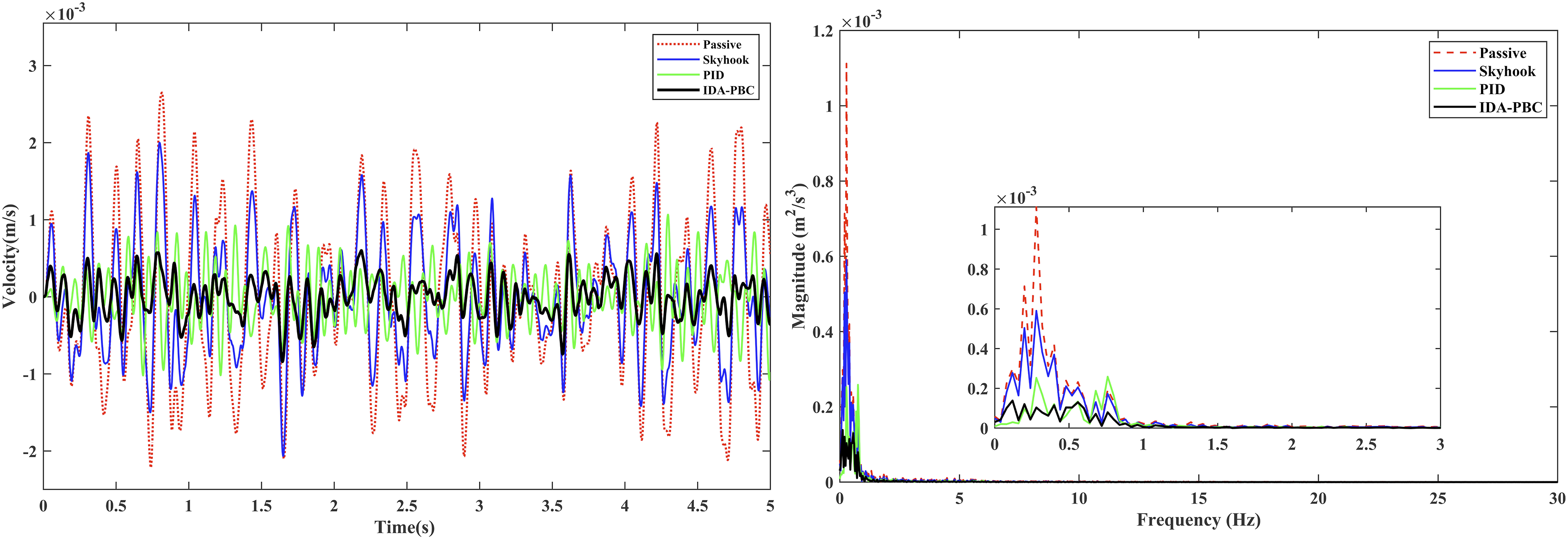
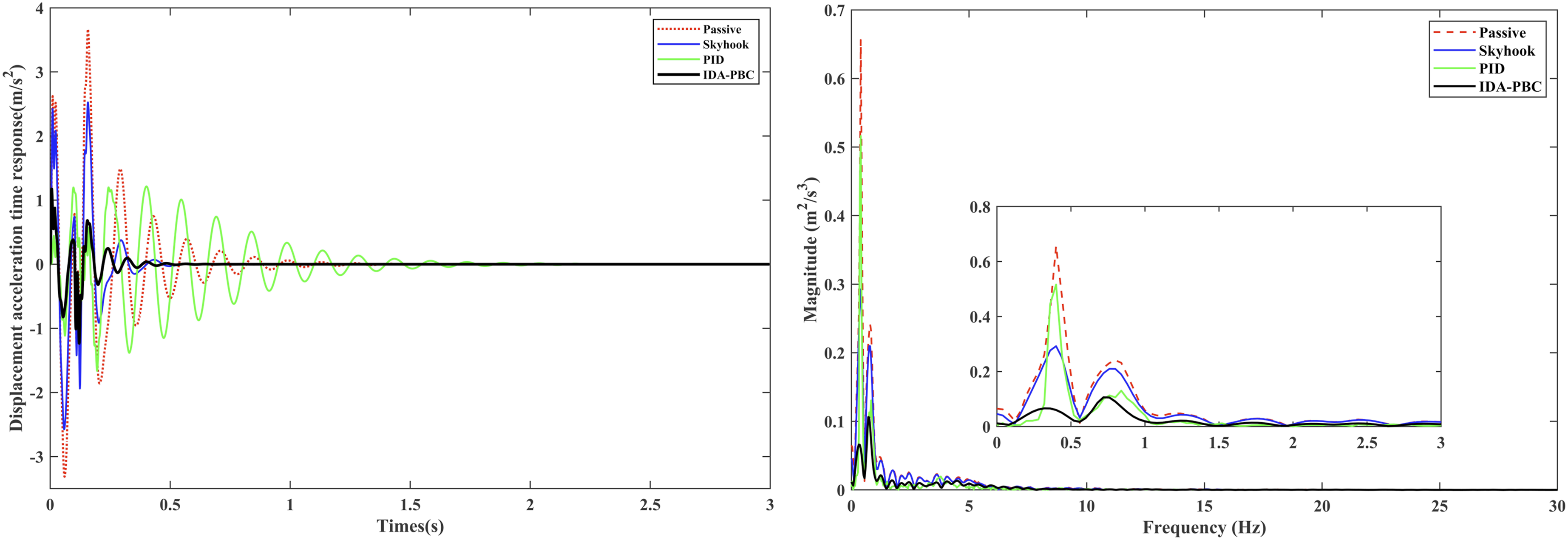
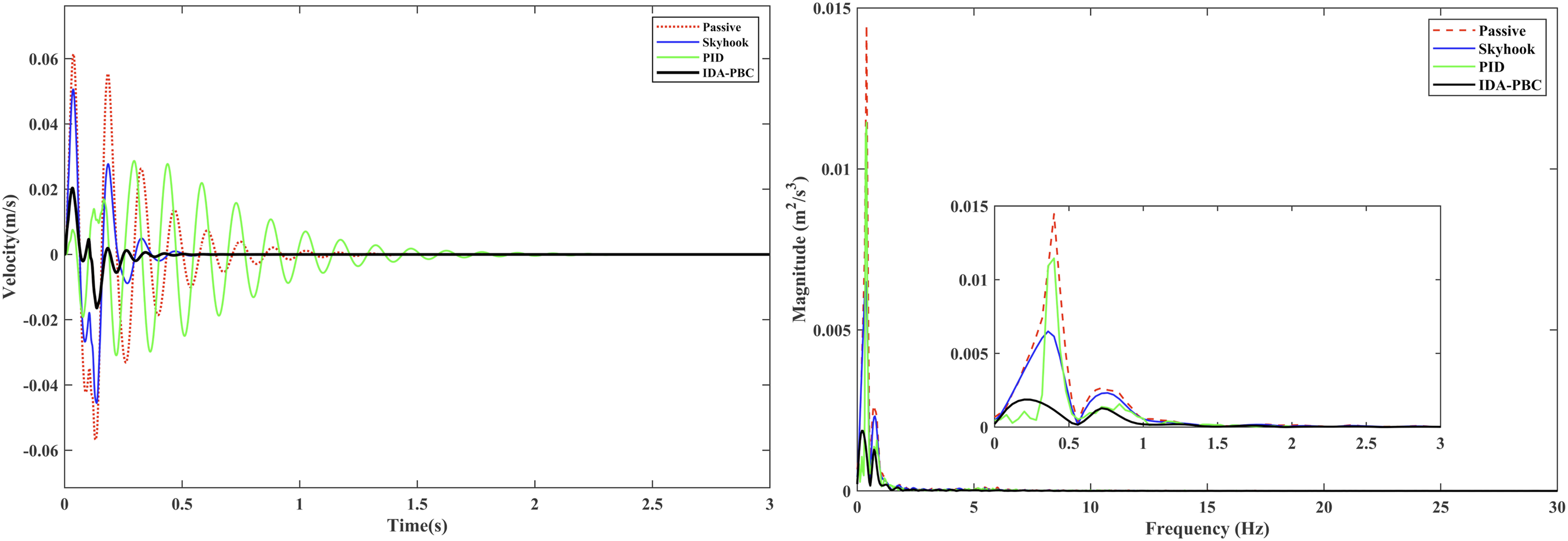
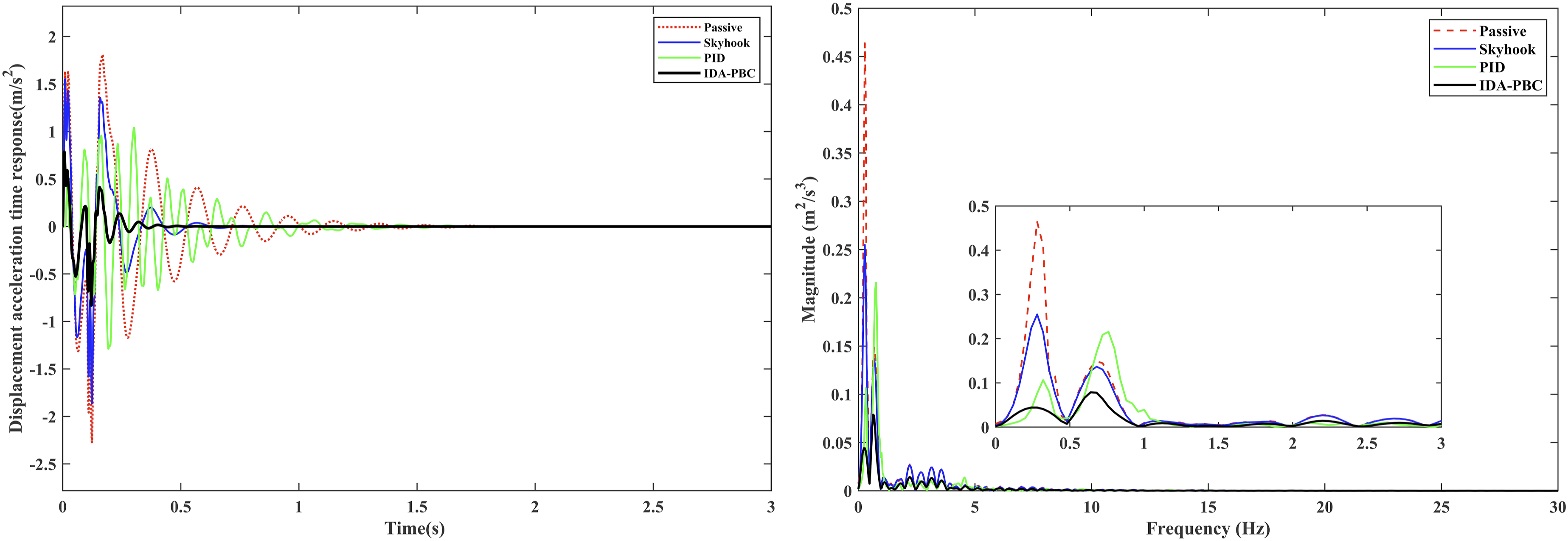
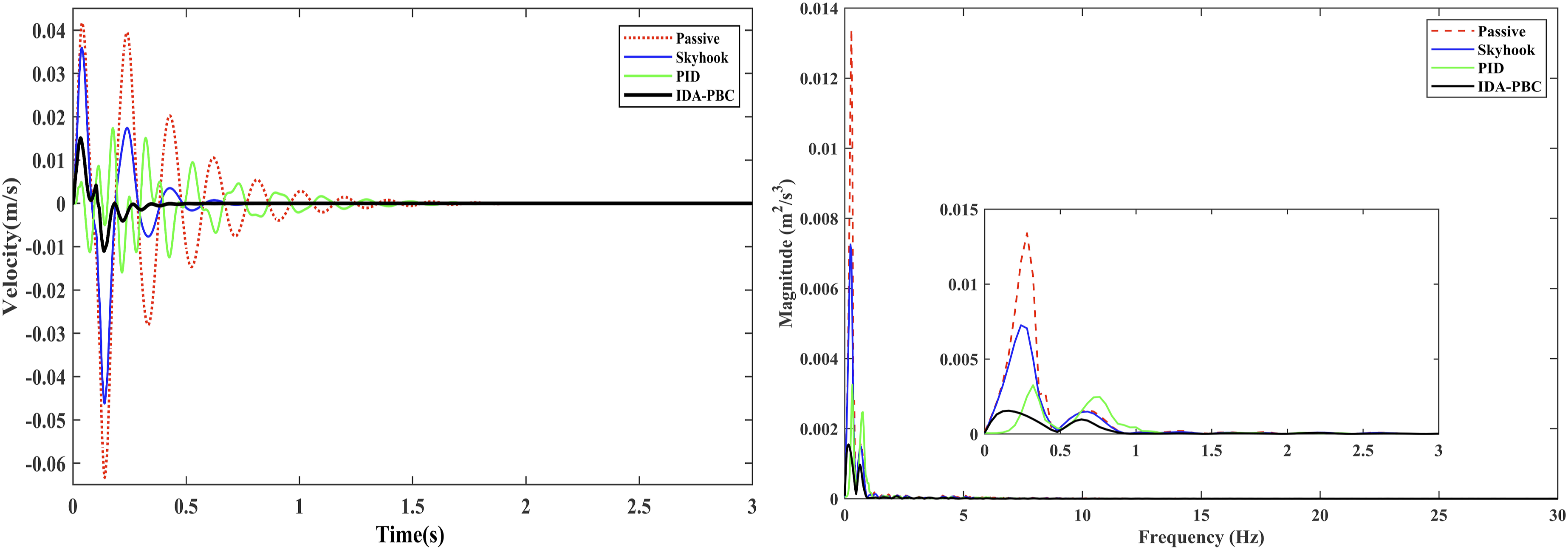
Two typical operating conditions were considered: random excitation during uniform-speed operation and emergency braking. For random excitation, Gaussian white noise filtered by a low-pass filter was used to represent the combined excitation from variable-length rope vibration and hoisting machine vibration, and was applied as the external input to the hoisting system. For emergency braking, filtered high-frequency Gaussian white noise was used to simulate the free oscillation stage after braking. Under both conditions, the longitudinal vibration responses of the car system with passive, Skyhook, PID, and IDA-PBC control were simulated under no-load and full-load conditions. Figures 4–7 show the time- and frequency-domain acceleration and velocity responses under random excitation, while Figures 8–11 show the corresponding responses under emergency braking.
4.1.2. Results analysis
The time–frequency response curves under random excitation are shown in Figures 4–7. Under both no-load and full-load conditions, the proposed IDA-PBC controller achieves lower longitudinal acceleration and velocity responses than passive, Skyhook, and PID control. In the time domain, the vibration peaks and oscillation amplitudes are effectively reduced. In the frequency domain, the proposed method also suppresses the low-frequency vibration peaks closely related to ride comfort. These results indicate that the proposed controller provides stronger vibration attenuation under the considered random-excitation condition.
The emergency-braking responses are shown in Figures 8–11. Compared with passive, Skyhook, and PID control, the proposed controller also shows better vibration suppression under different loading conditions. It more effectively reduces the time-domain acceleration and velocity amplitudes of the car system. In the frequency domain, Skyhook and PID control still exhibit obvious oscillations and vibration peaks during the free oscillation stage after braking, whereas the proposed controller attenuates these oscillations and produces lower vibration amplitudes. Therefore, the proposed IDA-PBC controller demonstrates better numerical vibration-suppression performance under both random excitation and emergency braking.
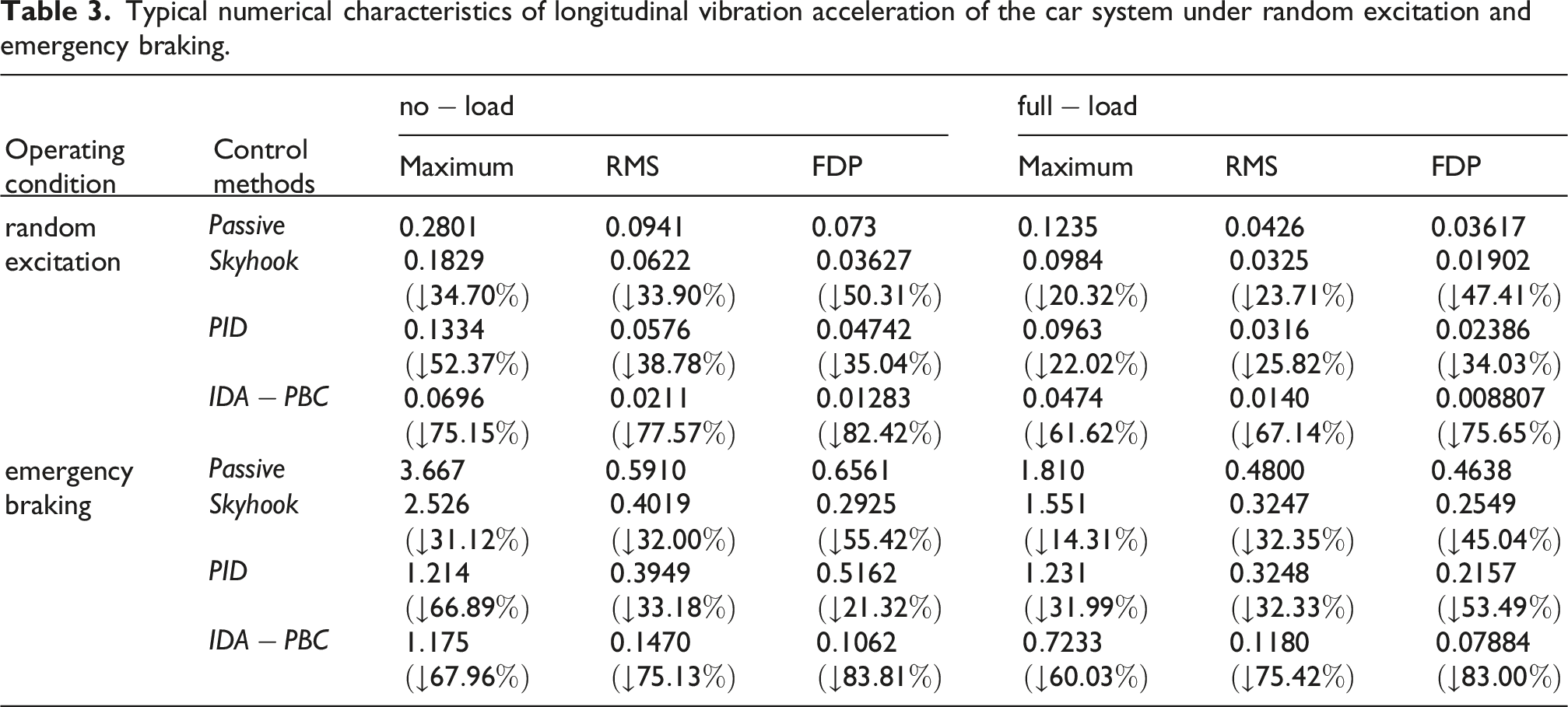
Typical numerical characteristics of longitudinal vibration acceleration of the car system under random excitation and emergency braking.
4.2. Parameter sweep analysis under model uncertainties
To further evaluate the influence of model parameter uncertainties on the proposed controller, a parameter sweep analysis was conducted. The uncertain parameters include the car mass
Parameter sweep results of the IDA-PBC-controlled system under model uncertainties.
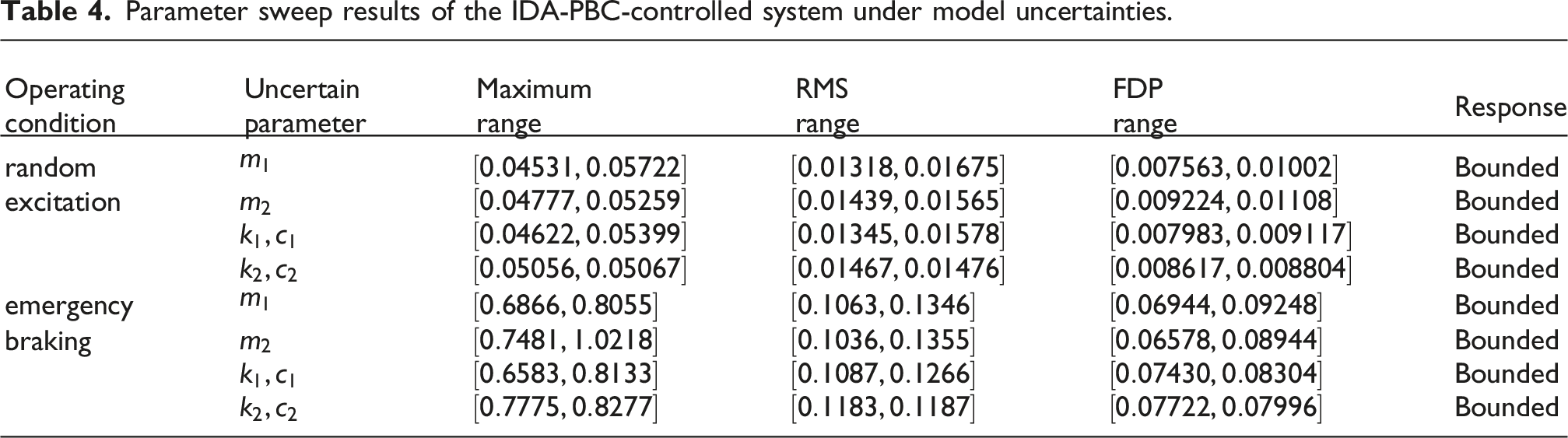
These results indicate that the proposed controller maintains acceptable vibration-suppression performance when key mass, stiffness, and damping parameters vary within ± 20% of their nominal values. Therefore, the parameter sweep analysis provides additional numerical support for the robustness of the proposed IDA-PBC controller against model parameter uncertainties.
The comparative numerical simulations in Section 4.1 show that the proposed IDA-PBC controller effectively suppresses longitudinal car vibration under random excitation and emergency braking. It reduces vibration peaks, attenuates oscillation amplitudes, and suppresses low-frequency vibration components under the considered numerical simulation conditions. The parameter sweep analysis in Section 4.2 further shows that the vibration responses remain bounded when key mass, stiffness, and damping parameters vary within ± 20% of their nominal values, demonstrating the enhanced robustness of the proposed controller against model parameter uncertainties.
5. Conclusion
Aiming at the longitudinal vibration problem of the nonlinear car system of a high-speed elevator under multiple operating conditions and parameter uncertainties, an IDA-PBC strategy is proposed, and the main conclusions are as follows: (1) A seven-degree-of-freedom nonlinear model of the high-speed elevator car system was constructed from the system-energy perspective and reconstructed into PH form using relative-state information. The resulting model and control formulation require only relative displacement and velocity information, reducing reliance on absolute states or complex observers and providing a theoretical basis for relative-state-feedback vibration control. (2) An IDA-PBC controller was designed by transforming the nonlinear car system into a desired linear system with ideal damping performance. The resulting control law uses only the relative displacement and velocity of the car system, and the global asymptotic stability of the zero-disturbance closed-loop system was proven. Parameter selection criteria with clear physical significance were also proposed to enhance robustness against parameter uncertainties. (3) Uniform-speed operation and emergency braking were considered, and the time-frequency responses under Passive, Skyhook, PID, and IDA-PBC control were compared through numerical simulations. The results show that the proposed method reduces the Maximum, RMS, and FDP values of longitudinal acceleration by more than 60%, effectively suppressing car longitudinal vibration. The parameter sweep analysis further shows that the vibration responses remain bounded when key mass, stiffness, and damping parameters vary within ± 20% of their nominal values, supporting the enhanced robustness of the proposed controller against model parameter uncertainties.
It should be noted that the validation in this study is based only on numerical simulations, and experimental tests, hardware-in-the-loop validation, and industrial operating data have not yet been conducted. In future work, experimental and hardware-oriented studies will further examine the implementation requirements of the proposed control strategy. The required relative displacement can be measured by linear displacement sensors, such as LVDTs, linear encoders, or draw-wire sensors, mounted vertically between the car and the car frame, while the relative velocity can be obtained by filtered displacement differentiation or co-located velocity sensors. The actuator considered for subsequent studies is a bidirectional linear force actuator installed in parallel with the car bottom suspension between the car and the car frame. In hardware design, the actuator should be selected according to the peak and RMS values of the simulated control force, with bandwidth covering the dominant longitudinal vibration frequency range. Therefore, actuator force capacity, saturation, time delay, power consumption, measurement noise, and signal filtering will be further examined through hardware-in-the-loop tests, experimental platform validation, and industrial operating data.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the Natural Science Foundation of Shandong Province (Grant No. ZR2023ME174).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.