
Abstract
Repetitive control (RC) is widely used for achieving high-precision tracking and effective rejection of periodic disturbances in servo and vibration-prone systems. Conventional single-period and multi-period repetitive controllers, however, rely on integer delay models that cannot exactly represent the true fundamental periods of multi-frequency periodic signals, leading to frequency mismatch and residual steady-state errors. To address this limitation, this paper proposes a Fractional Multi-Period Repetitive Controller (FMPRC) that preserves non-integer delay lengths within the discrete-time multi-period internal model, thereby maintaining accurate frequency alignment between the controller and actual periodic components. The total delay is decomposed into integer and fractional components, where the fractional delay is realized using either infinite impulse response (IIR) or finite impulse response (FIR) filters. Unlike conventional delay rounding approaches, the proposed formulation embeds fractional-delay modeling directly into the internal model while preserving unity gain, causality, and closed-loop stability under the plug-in RC framework. Stability conditions and practical implementation aspects of the FMPRC are analyzed, and both IIR- and FIR-based realizations are systematically compared. Simulation studies on high-precision servo systems subject to multi-frequency and time-varying periodic disturbances demonstrate that the proposed FMPRC significantly improves steady-state tracking accuracy and periodic disturbance rejection compared to conventional single-period and multi-period repetitive controllers. These results demonstrate the effectiveness of the proposed FMPRC as multiple-frequency vibration suppression strategy for high-precision motion and servo control systems.
Keywords
1. Introduction
Tracking and rejecting periodic signals are common challenges in many control applications. Repetitive controller (RC), based on the internal model principle introduced by (Francis and Wonham, 1975), is a well-known control strategy used to achieve high-precision tracking of periodic references and effective rejection of periodic disturbances. RC is a learning-based controller, similar to iterative learning control (Chen et al., 2024; Huang and Li, 2014; Li et al., 2024; Wu et al., 2021; Xie et al., 2023), where the current control input is derived from the previous period or cycle. As the iterations increase, the performance of the system in performing repetitive tasks improves. Recently, RC has been implemented in many control applications such as wearable walking exoskeletons (Huang et al., 2024), bearingless induction motor (Ye et al., 2024), line-of-sight stabilization (Feng et al., 2024), piezo-actuated nanoscanners (Li et al., 2022), islanded microgrid (Ma et al., 2019), and high-speed raster scanning (Li et al., 2021).
In modern digital control systems, RC is predominantly implemented in discrete-time. As a result, substantial research efforts have focused on discrete-time internal model structures and their practical realizations. In discrete-time, the internal model is implemented using delay operators that reproduce the signal period, enabling asymptotic periodic tracking when accurate period matching is achieved. The discrete-time RC model is expressed as
When the actual base frequency of the reference or disturbance deviates slightly from its nominal value
To resolve this issue, the multi-period repetitive controller (MPRC) (Yamada et al., 2000; Owens, L. M. and and Banks, 2004; Longman RW, Yeol JW, 2005; Yan et al., 2019; Kurniawan et al., 2020) was developed to track or compensate for such repetitive signals. These types of signals are commonly encountered in applications such as power electronics, electro-mechanical systems with multiple rotating machines, and industrial printing (Blanken et al., 2020; Pérez-Arancibia et al., 2010; Rashed et al., 2013;). In the MPRC, multiple base periods
This paper aims to enhance the performance of conventional MPRC by preserving the fractional delay lengths in the internal model, resulting in what we call the fractional multi-period repetitive controller (FMPRC). The proposed approach improves the tracking accuracy of closed-loop systems by explicitly incorporating fractional delay lengths for accurate frequency component matching in the reference and disturbance signals. Each fractional delay is decomposed into integer and fractional parts, with the fractional component approximated using either IIR or FIR filters. In this study, the FMPRC with an IIR filter is referred to as IIR-FMPRC, while the FMPRC with a FIR filter is denoted as FIR-FMPRC. A stability analysis of the closed-loop system using these controllers is provided, along with simulation results and comparative studies to validate the tracking improvement achieved by the proposed design. To highlight the originality of this work, the main contributions are summarized as follows: • A FMPRC is proposed by systematically extending the conventional MPRC framework to preserve non-integer delay lengths within the internal model, thereby enhancing frequency alignment between the controller and the actual periodic signals and improving steady-state tracking accuracy. • A unified fractional-delay modeling framework is developed within the plug-in discrete-time MPRC structure, leading to two realizations: IIR-FMPRC and FIR-FMPRC based on Thiran and Lagrange approximations, respectively. • The proposed approach embeds fractional-delay modeling directly into the multi-period internal model while preserving unity gain and causality of the delay operators. • A stability analysis and practical design guideline are provided to ensure implementability and fair comparison with conventional SPRC and MPRC schemes.
Compared with recent RC extensions that enhance robustness against frequency variations, model uncertainties, and external disturbances, such as notch-based internal models (Kurniawan et al., 2025), decentralized structures for multivariable systems (Kurniawan et al., 2025), composite strategies combining adaptive disturbance rejection control (ADRC) with higher-order repetitive control (HORC) (Zhang et al., 2025), Padé-based preview RC formulations in continuous-time settings (Lan and Zhao, 2024), as well as fractional-order ADRC-based RC designs where fractional dynamics are introduced in the observer rather than in delay modeling (Lan et al., 2025), the proposed FMPRC addresses a fundamentally different issue: the period mismatch caused by integer delay rounding in discrete-time multi-period RC. Rather than modifying the feedback structure or introducing auxiliary compensation schemes, this work directly preserves non-integer discrete-time delay lengths within the internal model itself, ensuring accurate frequency alignment for all periodic components appearing in both the reference and disturbance signals.
The remainder of this paper is organized as follows: Section 2 provides the preliminaries, introducing the basis concepts of plug-in RC and the design of discrete-time single-period RC (SPRC) and multi-period RC (MPRC). Section 3 presents the proposed method, including the synthesis, stability conditions, and design implementation. Section 4 discusses the simulation results and comparisons for three distinct cases. Finally, Section 5 offers concluding remarks.
2. Preliminaries: Design of SPRC and MPRC
Consider the plug-in RC-based closed-loop control system shown in Figure 1, where A closed-loop system structure incorporating a plug-in RC.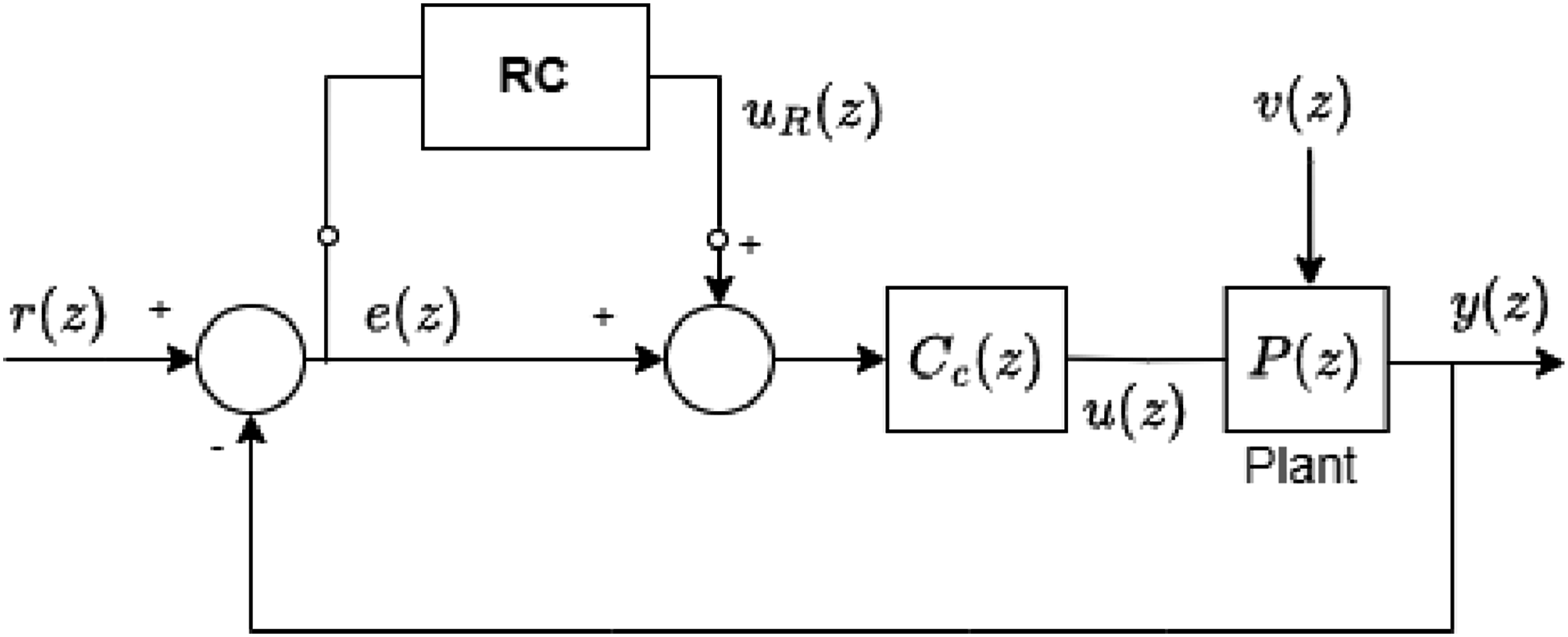
A single-period RC (SPRC) and multiple-period RC (MPRC) as plug-in controllers in Figure 1 can be expressed as follows



Here, Schematic representations of (a) single-period RC, and (b) multi-period RC.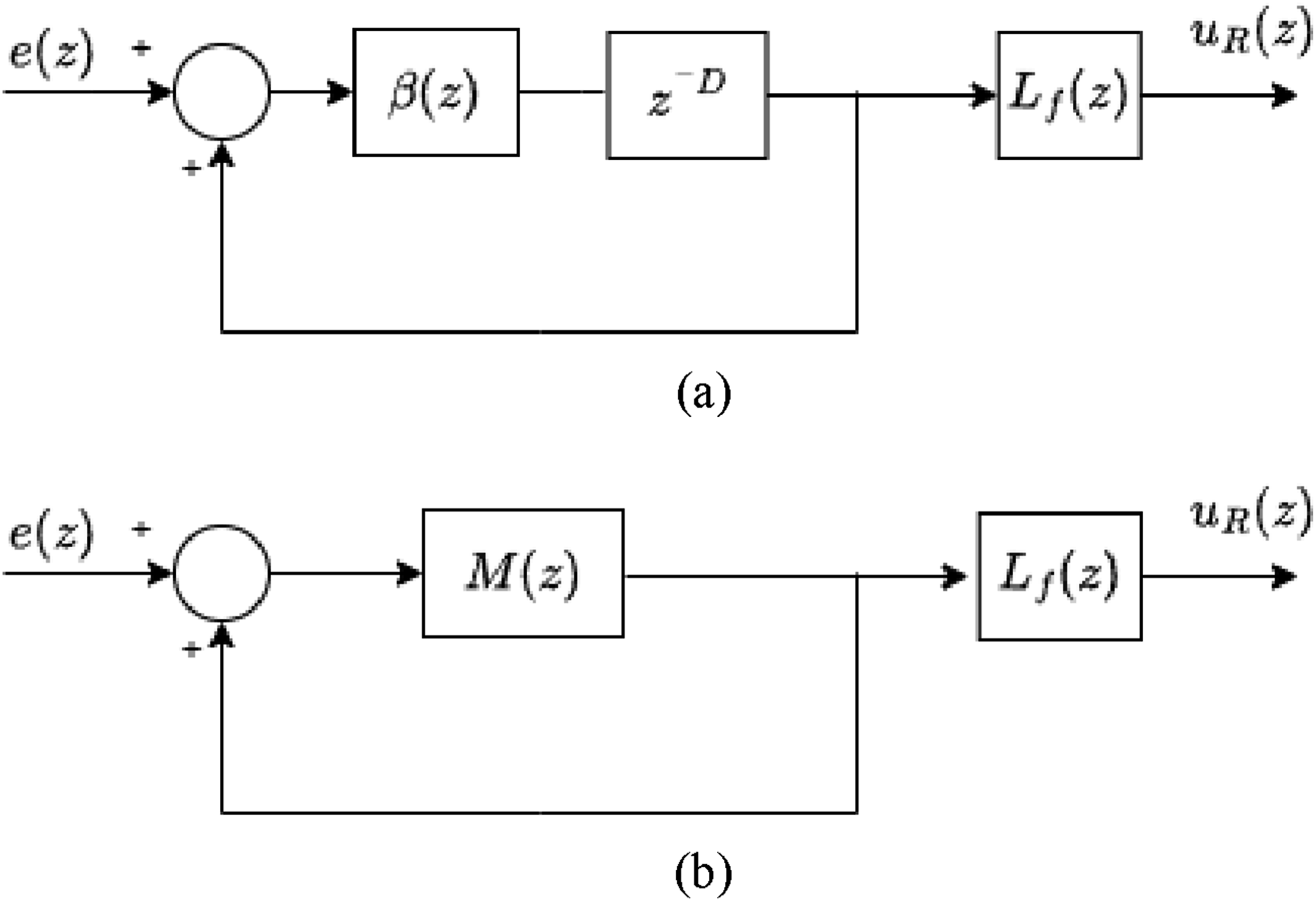
To further understand the realization of the block diagram


It can be noticed that Schematic representation of 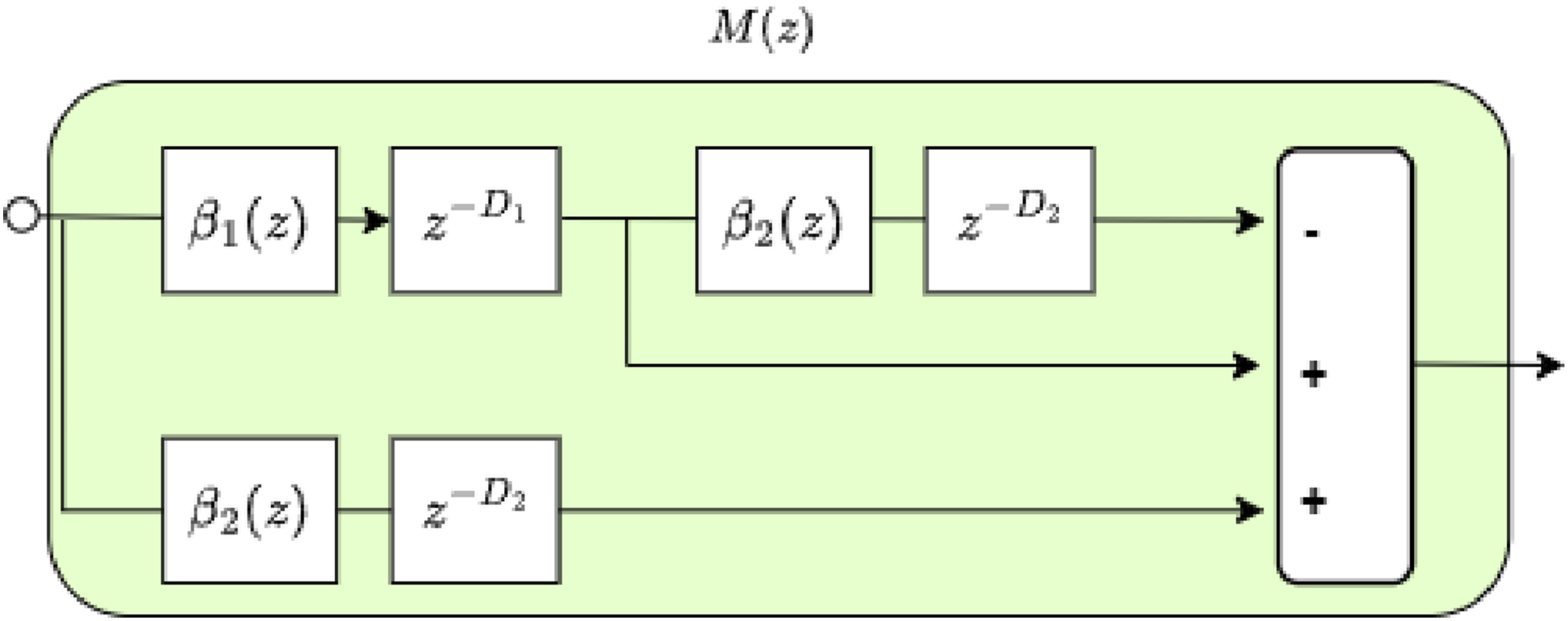
The low-pass filter

Throughout this work, two main assumptions are considered:
The continuous-time open-loop plant model
The non-harmonic basis frequencies
3. Fractional multi period RC (FMPRC)
In this work, the proposed FMPRC is introduced by modifying the internal model of MPRC, as shown in equation (2), with a particular focus on modifying the delay terms

3.1. IIR filter-based approximation
We begin by approximating



The IIR filter Schematic implementation of the proposed fractional multi-period repetitive controller: (a) IIR-FMPRC based on the IIR filter approximation, and (b) FIR-FMPRC based on the FIR filter approximation.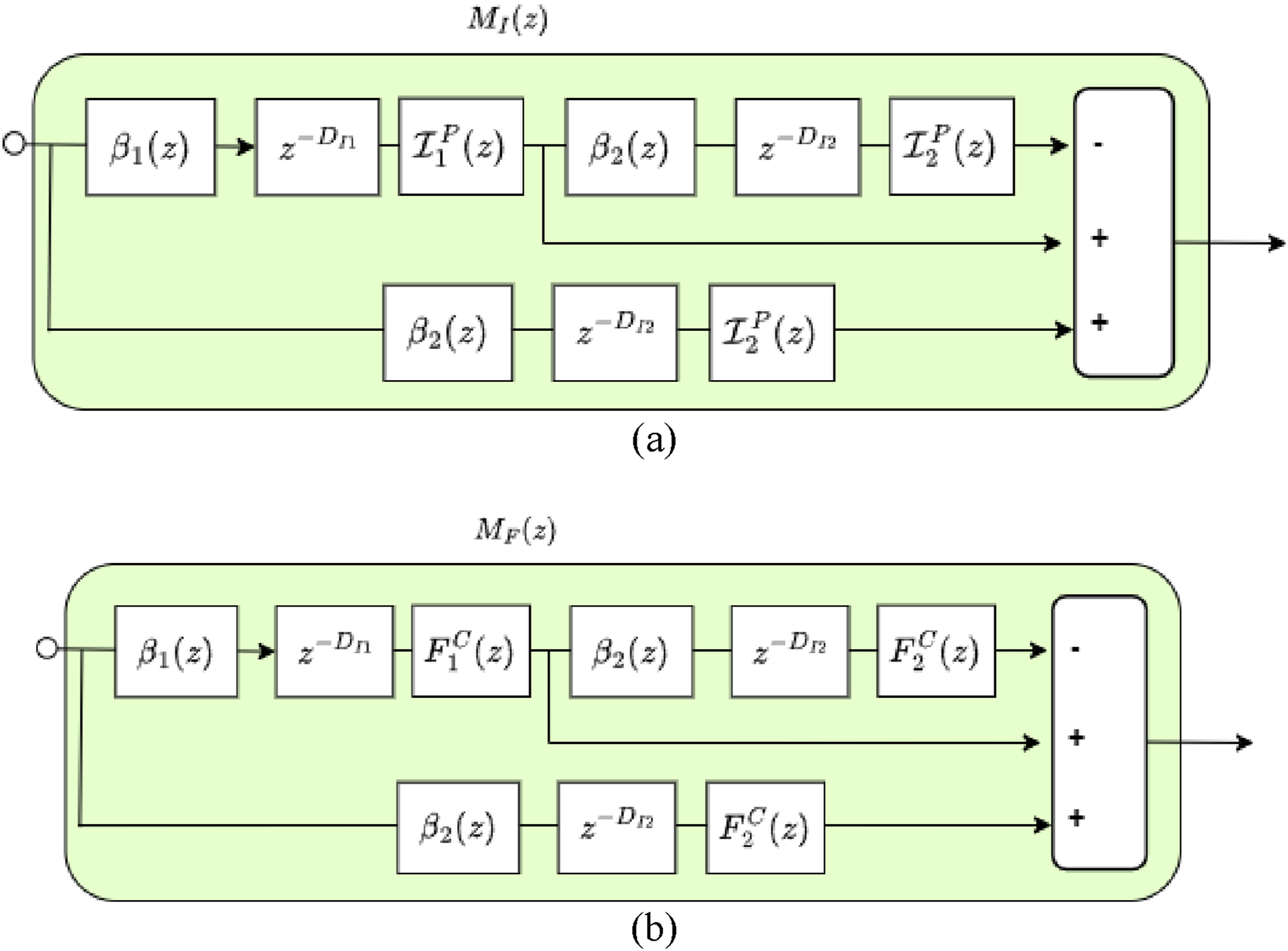


3.2. FIR filter-based approximation
Next, we aim to approximate


The constant

Similar to the IIR-based case, the schematic implementation of

3.3. Stability analysis and design implementation
Next, the stability of the closed-loop system shown in Figure 1 is analyzed, assuming that the plug-in FMPRC expressed in (10) is used. Since the internal model in (10) has a similar structure to that in (1), with the only difference being the replacement of the term 1. The closed-loop plant model 2.The system follows the small gain theorem for the closed-loop system incorporating the plug-in RC, as shown in Figure 1. Specifically, the condition is


The condition in (16) can be further written as
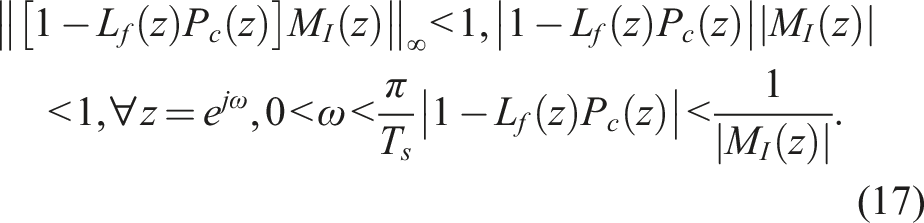
From (15), the closed-loop plant model is defined as the transfer function from Design implementation of FMPRC.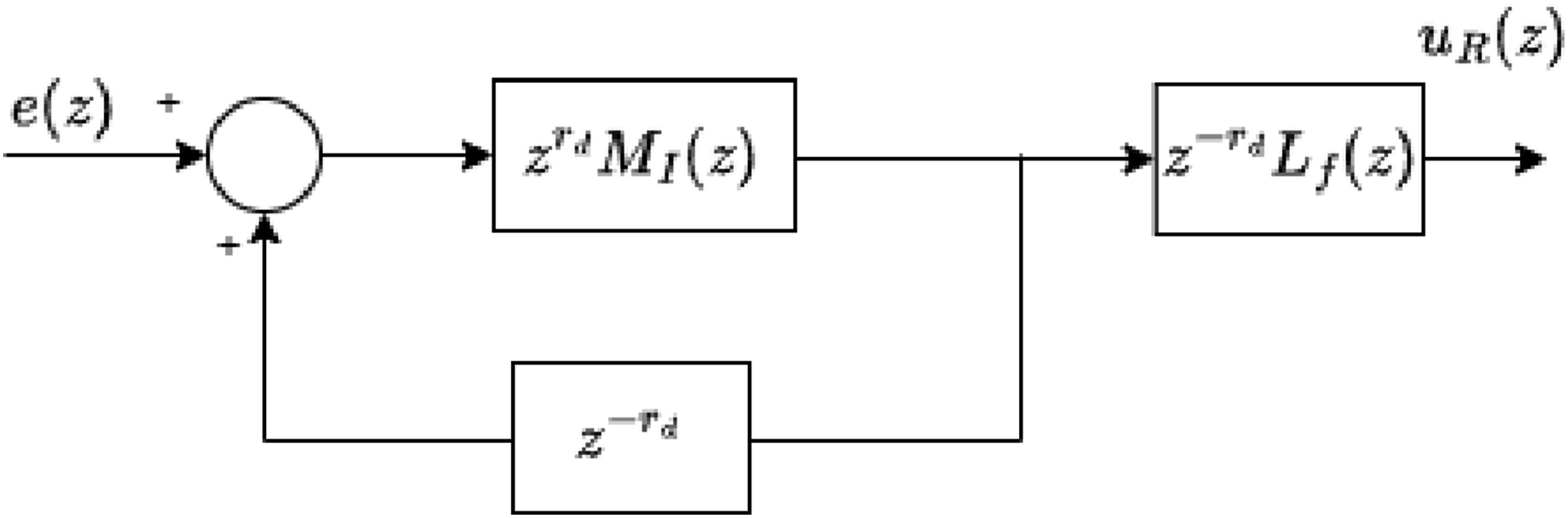
The above stability conditions are derived under the assumption of an accurate plant model. In practical implementations, however, modeling errors and unmodeled dynamics may introduce deviations between the nominal closed-loop plant
3.3.1. Remark 1
Consider plant uncertainties modeled as a bounded perturbation
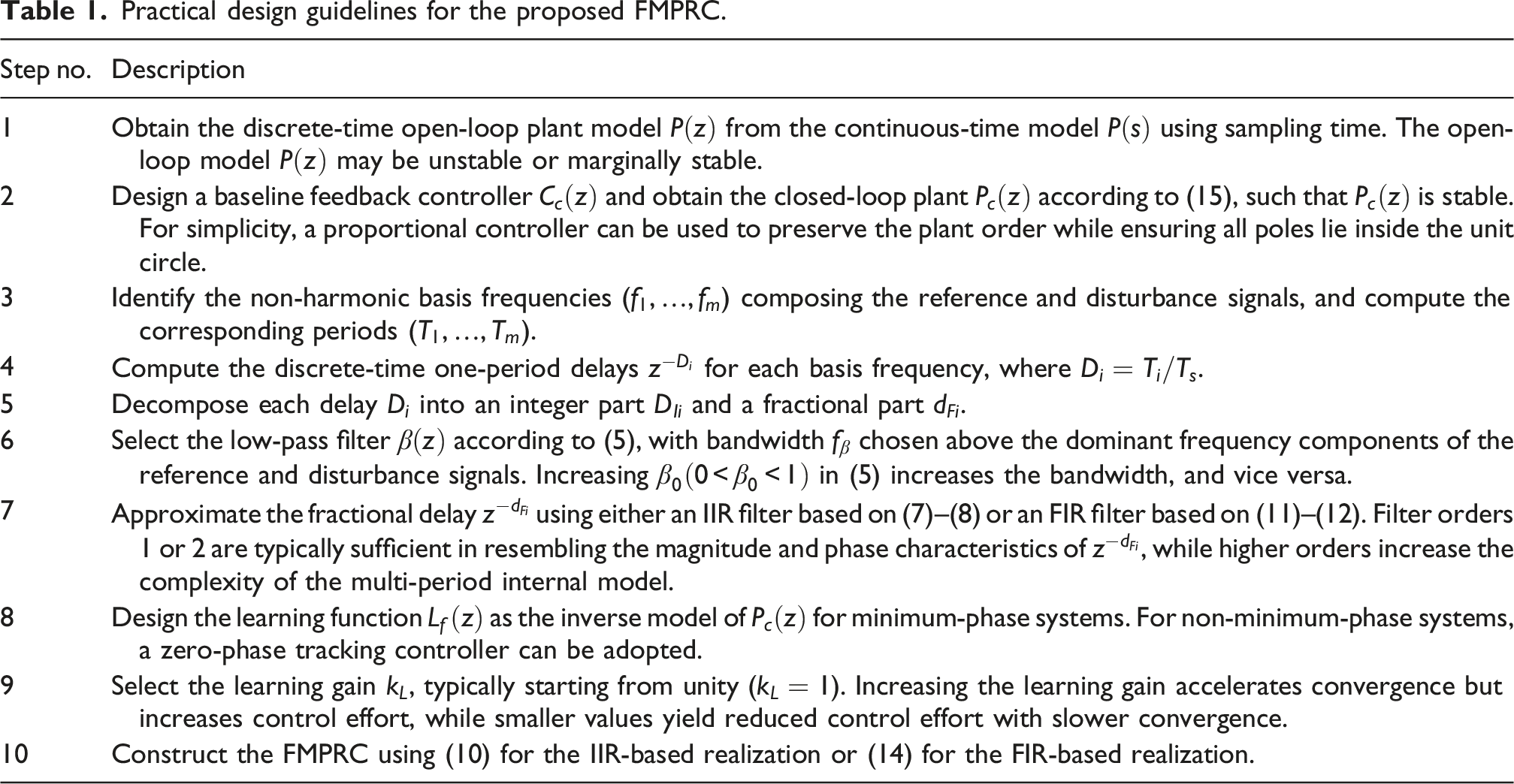
Practical design guidelines for the proposed FMPRC.
4. Results and discussion
Consider a servomotor (Kurniawan, Cao and Man, 2014) given by a continuous-time model as follows

The discrete-time model is also marginally stable, with one of its poles located at 
The plant model in (20) is now a stable, minimum-phase system with one zero and two complex poles, all located inside the unit circle. Specifically, the zero is at
To provide information regarding the simulation environment, the computational platform and implementation details are briefly described below. Simulations were performed on an HP ZBook Firefly G8 equipped with an Intel® Core™ i7-1165G7 processor, 8 GB RAM, running Windows 11, using MATLAB/Simulink R2022b. For future experimental validation, a dual-servo setup is planned, where one motor generates the reference motion and the other introduces independently adjustable periodic disturbances, including non-harmonic frequencies.
4.1. Case 1: Tracking periodic reference
and suppressing periodic disturbance
(
k
)
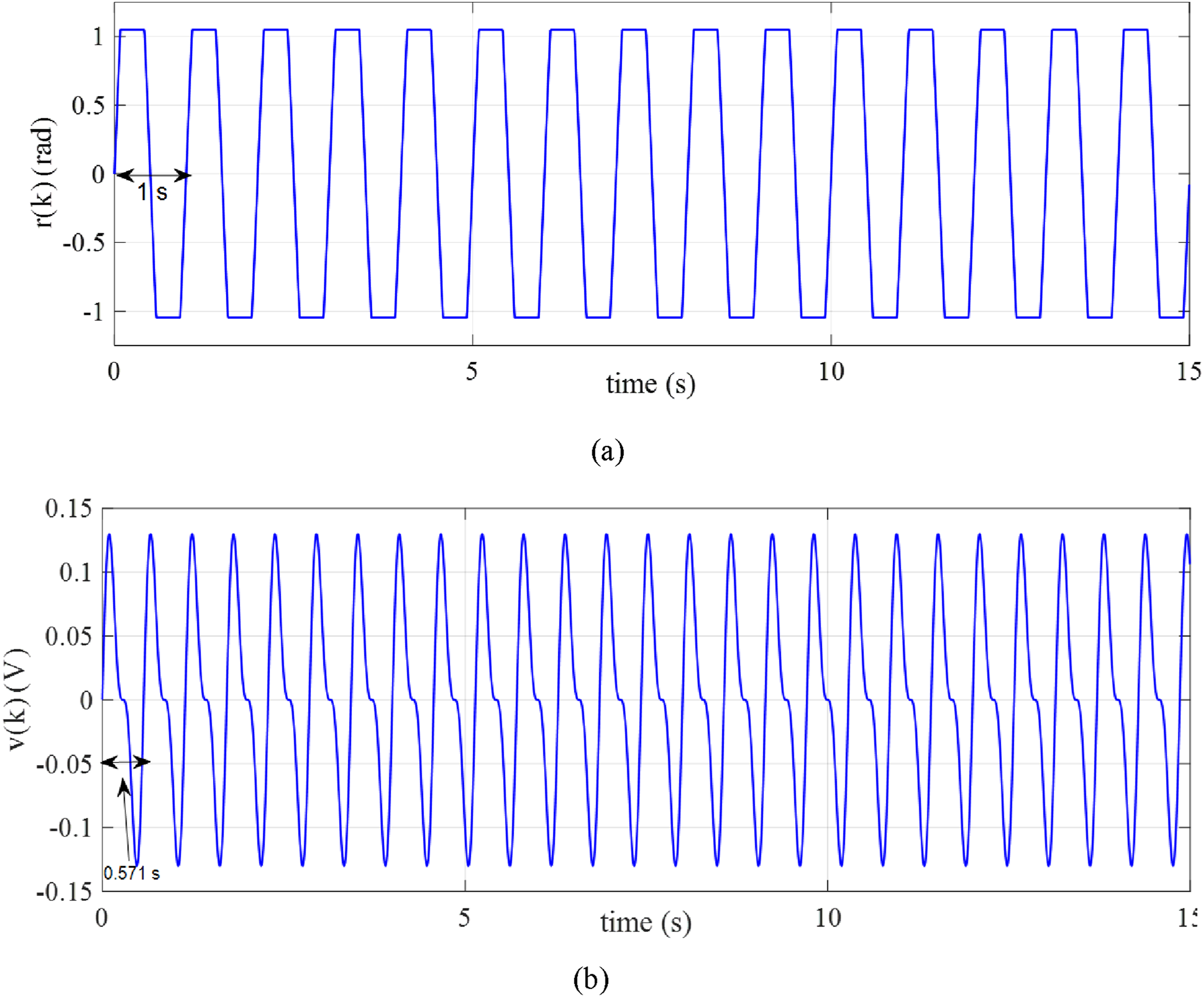
In Case 1, we consider the simultaneous tracking of the periodic reference (a) Periodic reference 

IIR- and FIR-based filter representations for the fractional time-delays
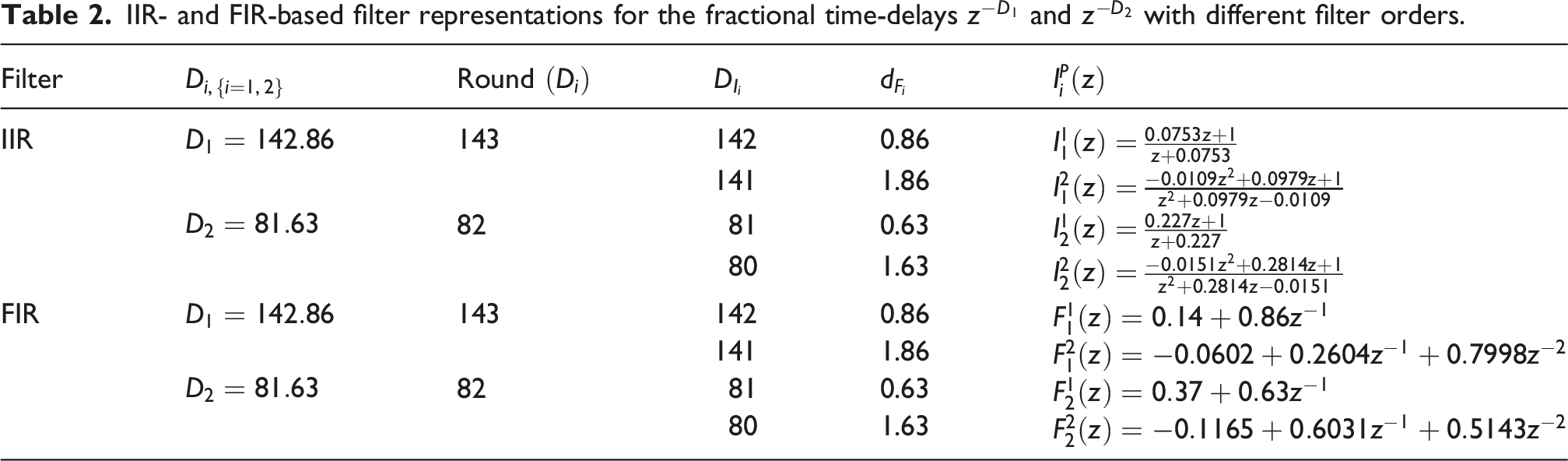
Next, we proceed with the implementation of the FIR-FMPRC design strategy. Table 2 also provides a summary of the FIR filter representations for the fractional time-delays
All comparative analyses are conducted within the same plug-in RC framework as shown in Figure 1 to ensure structural consistency. The basis of comparison focuses on the type of internal model employed. The SPRC serves as the fundamental benchmark, while the conventional MPRC represents the multi-period case without fractional-delay enhancement. The proposed IIR-FMPRC and FIR-FMPRC extend this structure by incorporating fractional-delay modeling. Controllers with adaptive frequency estimation are not included in the direct comparison, as such methods introduce additional transient effects that would obscure the specific contribution of the fractional internal model. Therefore, to ensure a fair comparison, the proposed IIR-FMPRC and FIR-FMPRC are evaluated alongside the SPRC and MPRC, as defined in equations (1) and (2), respectively. The initial comparison is conducted based on the magnitude characteristics of their respective internal models. The internal models of SPRC, MPRC, IIR-FMPRC and FIR-FMPRC are presented as follows






Here Magnitude-frequency characteristics: (a) SPRC internal model, (b) MPRC internal model. Magnitude-frequency characteristics: (a) IIR-FMPRC internal model, (b) FIR-FMPRC internal model.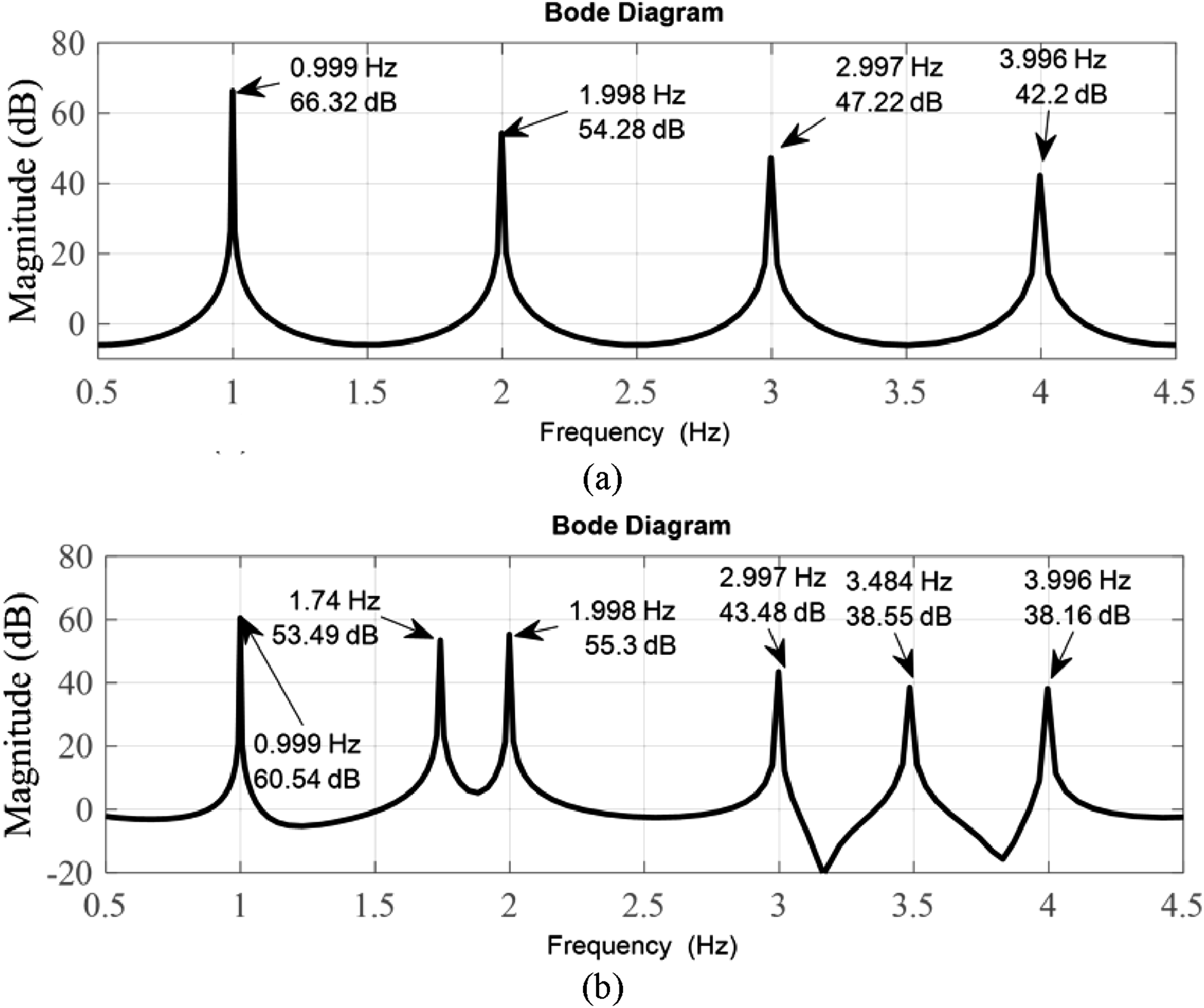
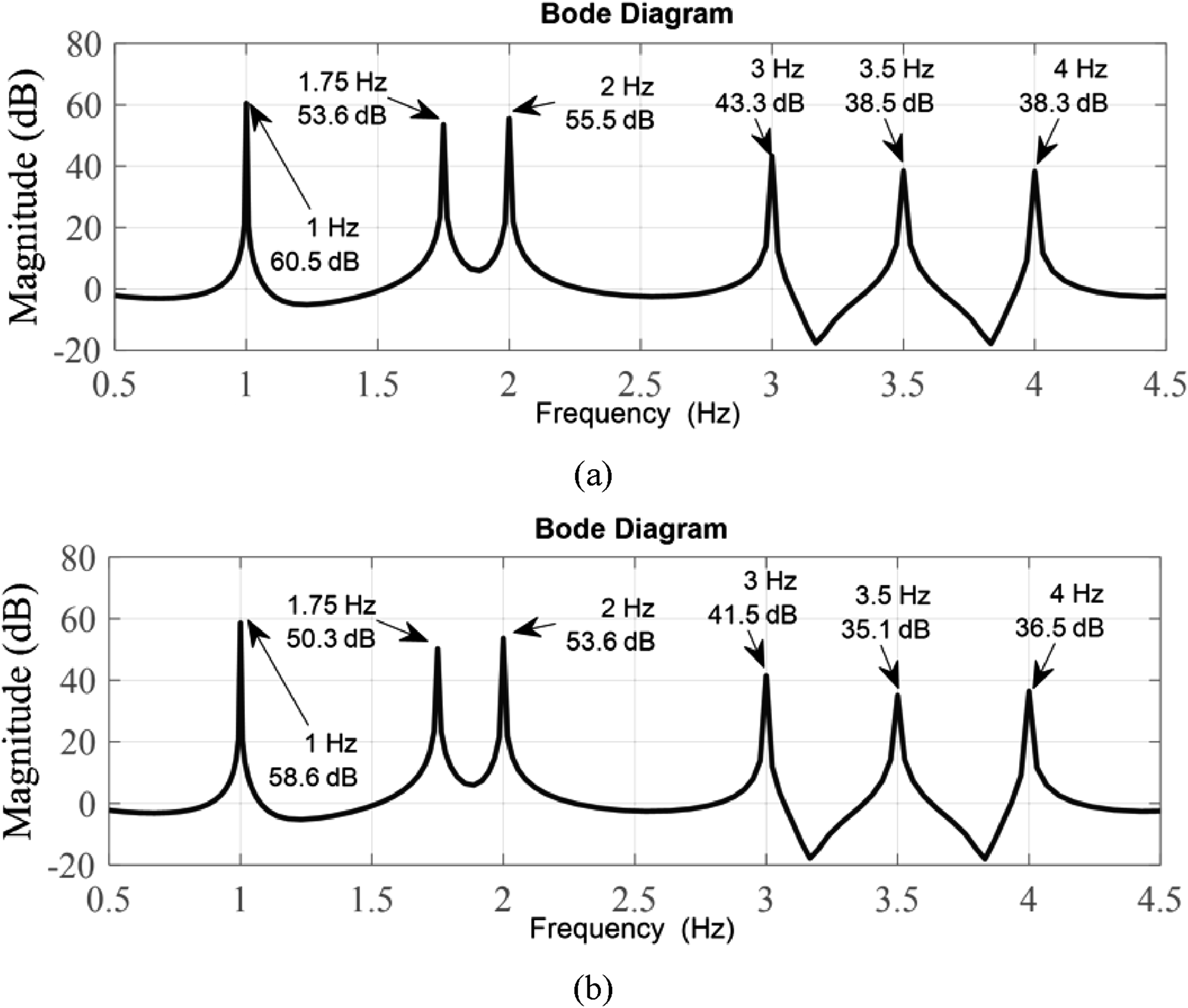
In contrast to SPRC and MPRC, the IIR-FMPRC and FIR-FMPRC, as illustrated in Figures 8(a) and (b), accurately align their frequency peaks with the desired base frequencies. The first base frequency exhibits peaks at 1 Hz, 2 Hz, and so on, while the second base frequency shows peaks at 1.75 Hz, 3.5 Hz, etc. This precision indicates that employing both IIR and FIR filters to approximate fractional delays successfully maintains the desired frequency peaks, thereby enhancing the tracking performance. Notably, there is a difference between IIR-FMPRC and FIR-FMPRC in terms of peak magnitudes, with IIR-FMPRC displaying slightly higher peak values compared to FIR-FMPRC. This phenomenon will later affect the tracking performance, especially during the steady state.
Figure 9 illustrates the tracking error responses of the system using SPRC, MPRC, IIR-FMPRC, and FIR-FMPRC. The tracking error responses for all four controllers, covering both the overall and transient phases, are shown in Figures 9(a) and (b), respectively. Figure 9(b) indicates that SPRC achieves a faster transient response and a lower transient peak compared to MPRC, IIR-FMPRC, and FIR-FMPRC. This behavior is expected, as SPRC involves only a single delay term, whereas IIR-FMPRC and FIR-FMPRC employ dual delay terms, resulting in longer effective time delays for the control input. Comparison of tracking errors 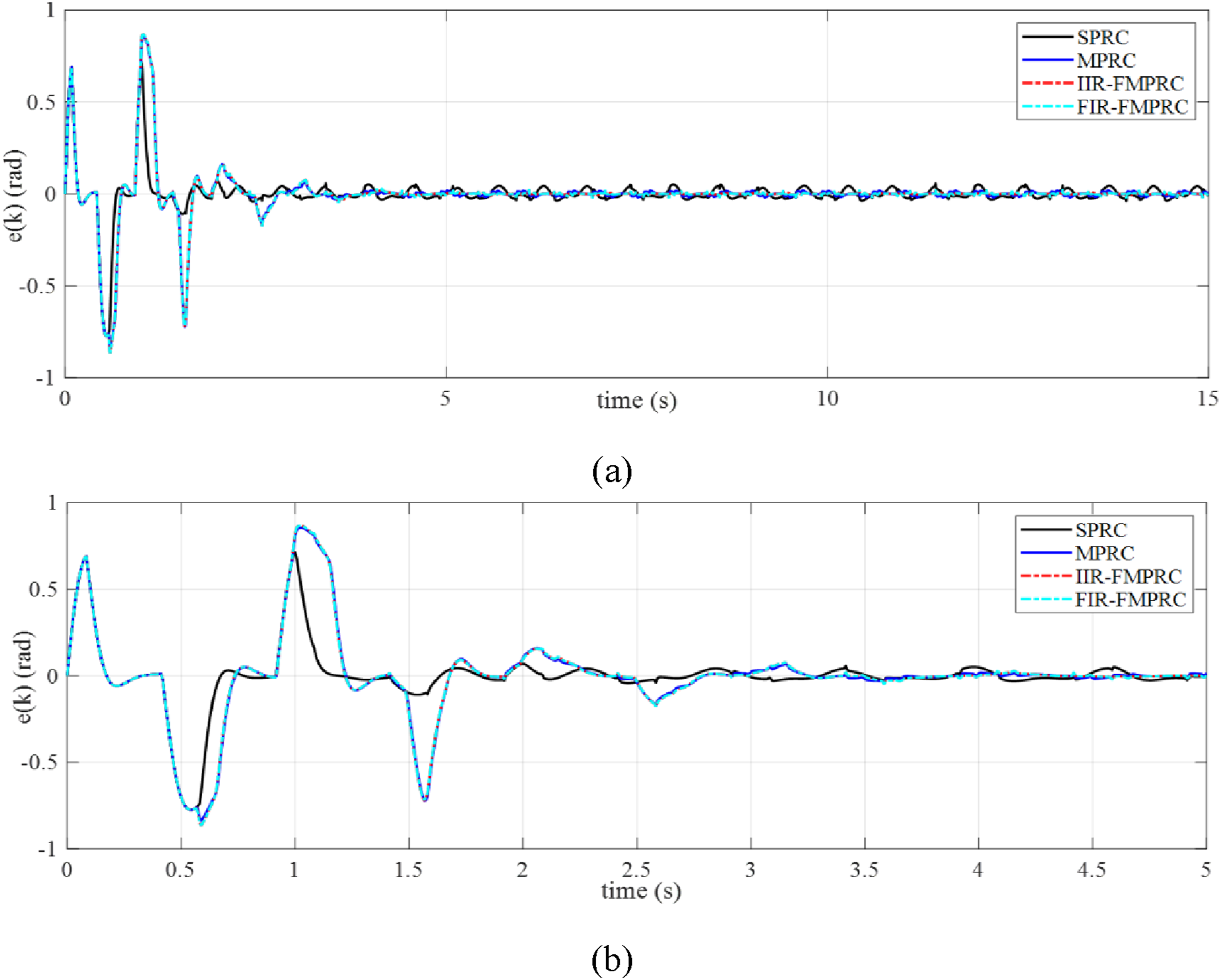
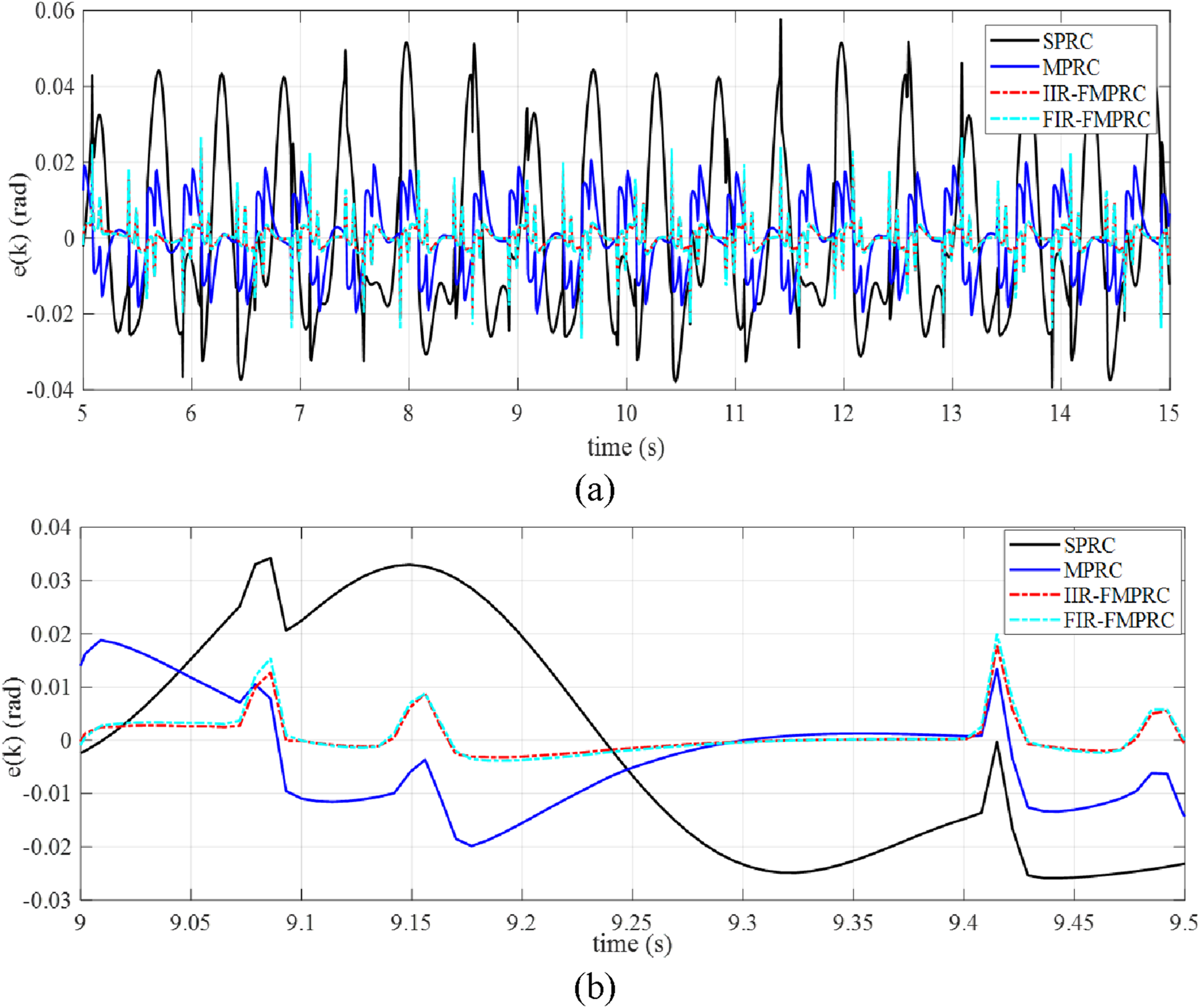
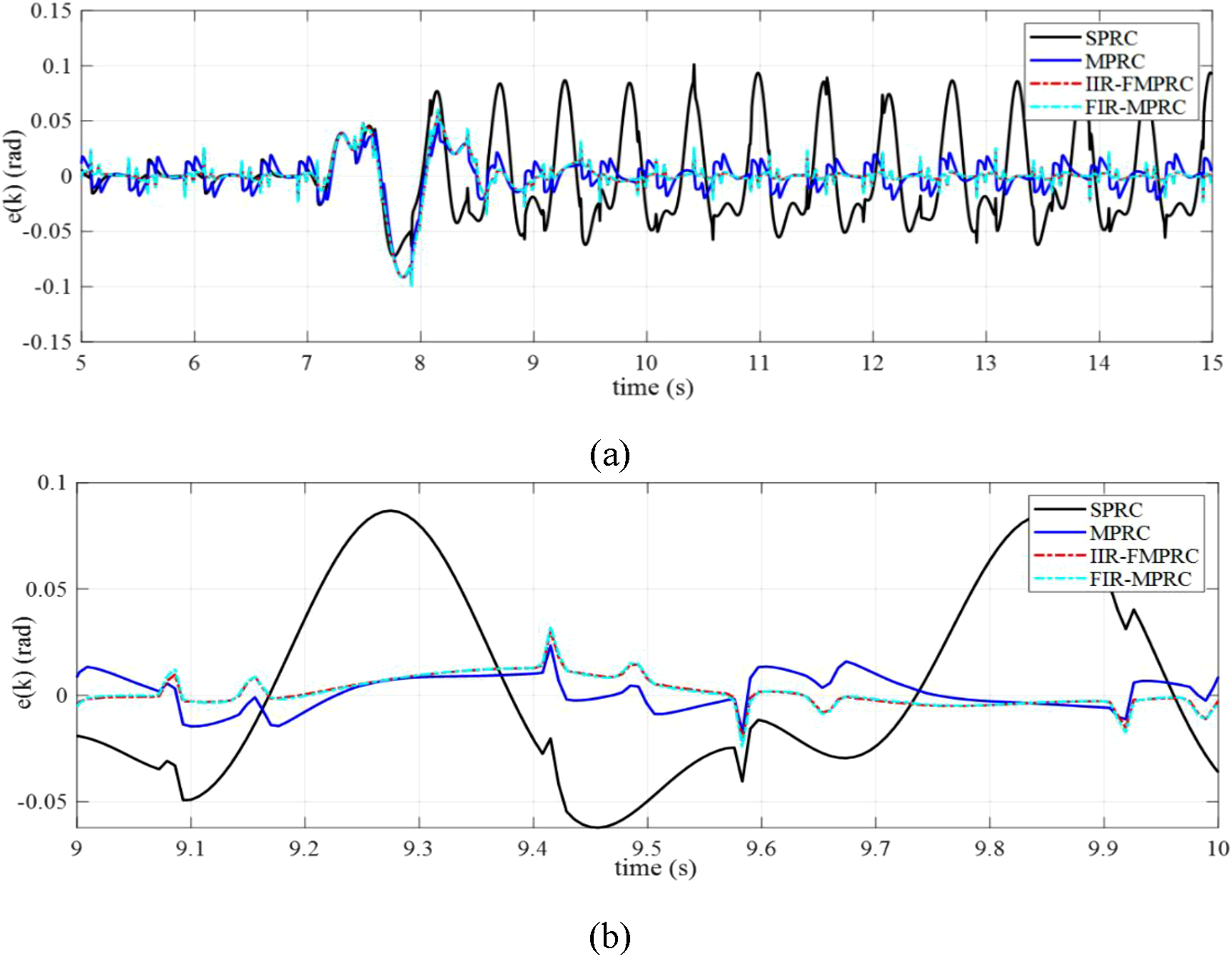
Figure 10 presents the steady-state tracking performance of the considered controllers. As shown in Figure 10(a), SPRC exhibits a larger steady-state tracking error compared to MPRC, IIR-FMPRC, and FIR-FMPRC. The enlarged view in Figure 10(b), corresponding to the interval from t = 9 to 9.5 s, further highlights that both IIR-FMPRC and FIR-FMPRC provide improved tracking accuracy relative to MPRC. In addition, IIR-FMPRC achieves a slightly smaller steady-state error than FIR-FMPRC. In addition to the tracking errors shown in Figures 9 and 10, the following performance metrics are also evaluated Steady-state tracking performance for Case 1: (a) tracking errors (b) enlarged view over 


Complementing the steady-state error metrics, two global performance indices are also considered to provide a more comprehensive evaluation of the tracking behavior. Specifically, the Integral of Squared Error (ISU) and the Integral of Time-weighted Absolute Error (ITAE) are defined as

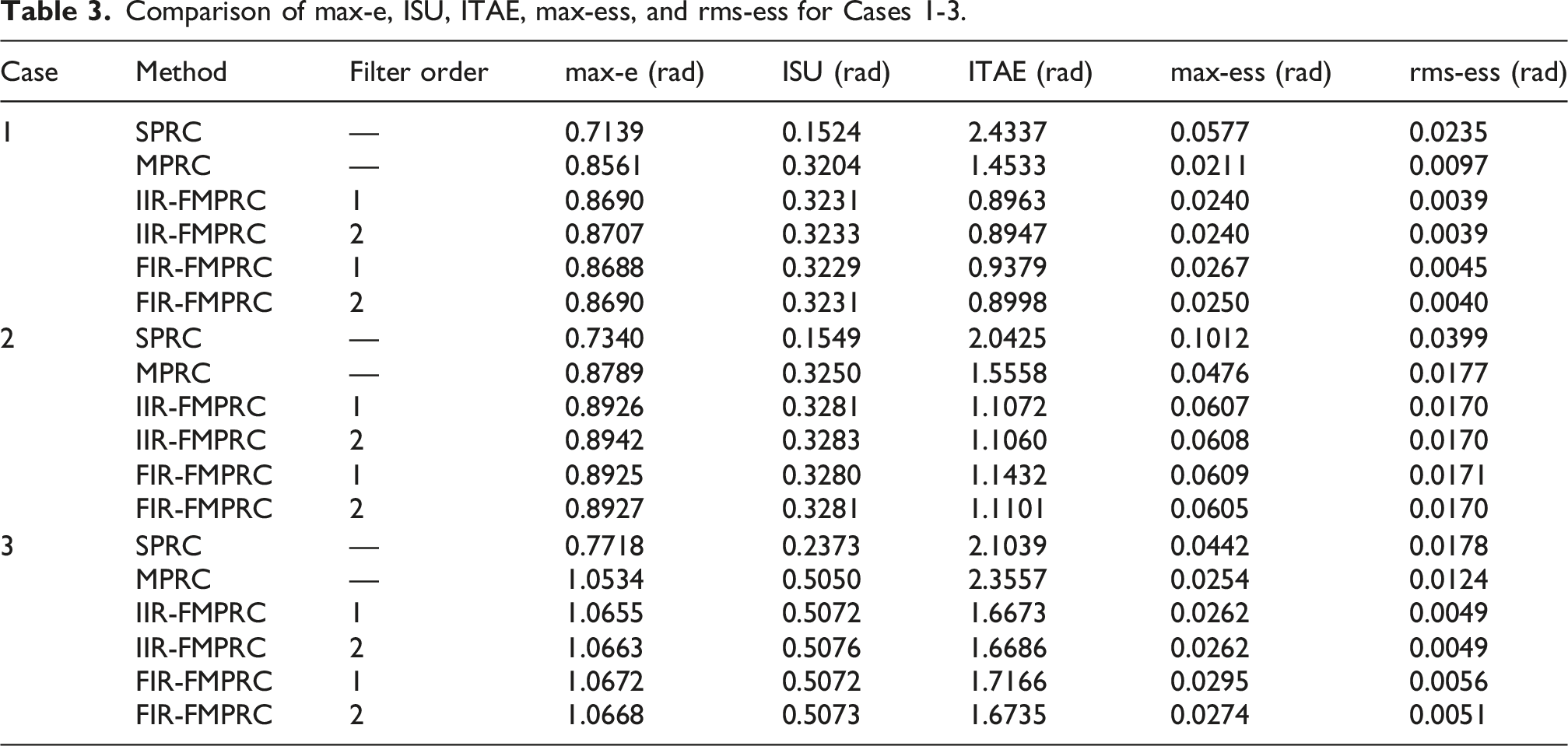
Comparison of max-e, ISU, ITAE, max-ess, and rms-ess for Cases 1-3.
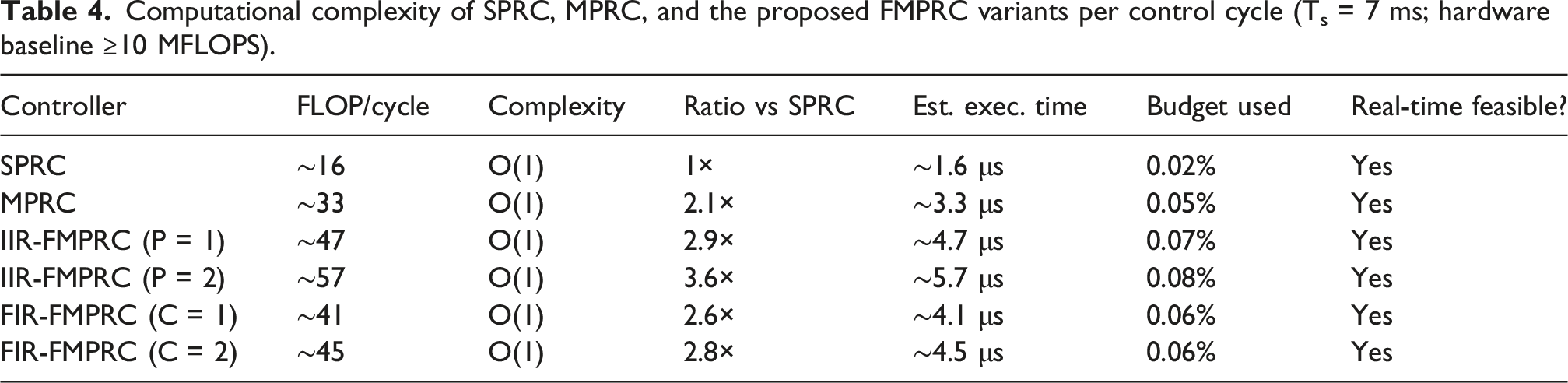
Computational complexity of SPRC, MPRC, and the proposed FMPRC variants per control cycle (Ts = 7 ms; hardware baseline ≥10 MFLOPS).
4.2. Case 2: Tracking periodic reference
and suppressing time-varying periodic disturbance
(
k
)
In Case 2, we evaluate the tracking performance under a time-varying disturbance while maintaining the same reference signal as in Case 1. The disturbance Time-varying periodic disturbance 
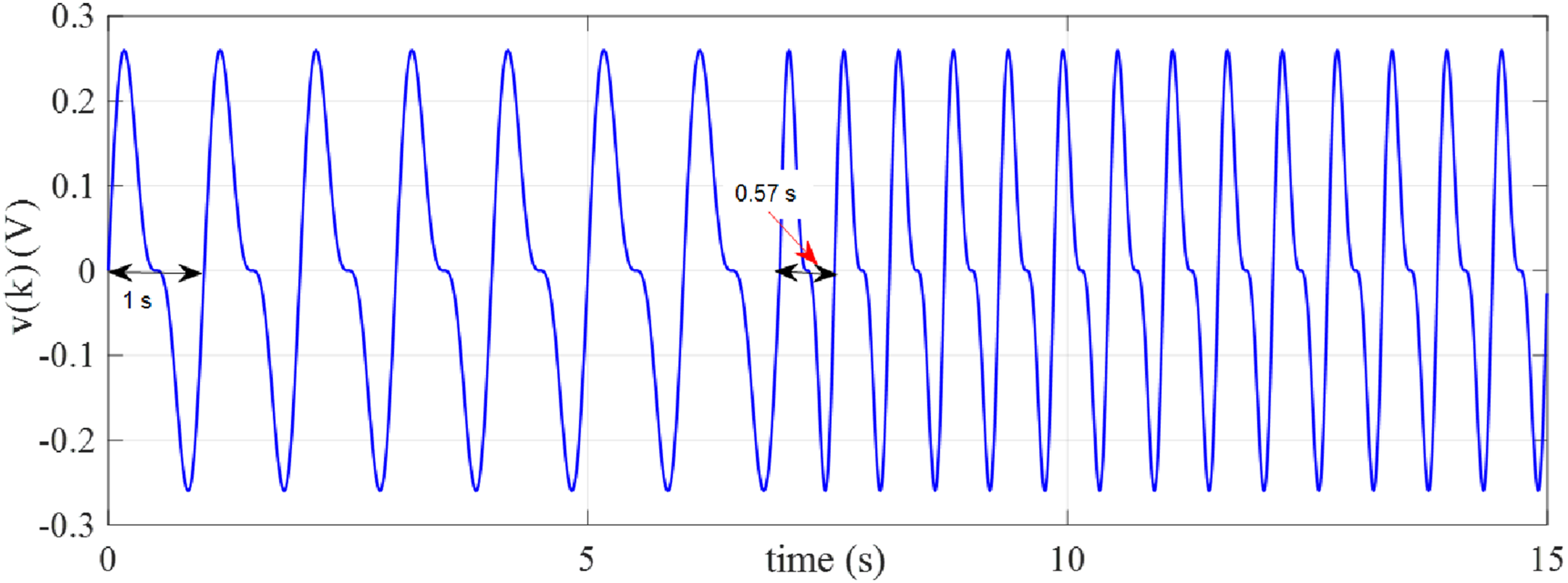
Figure 12 illustrates the tracking errors of the four controllers for Case 2. Similar to Case 1, Figure 12(b) demonstrates that SPRC achieves a faster initial transient response and a lower transient peak compared to MPRC, IIR-FMPRC, and FIR-FMPRC. However, as shown in Figure 13(a), the tracking performance of SPRC deteriorates significantly when the disturbance frequency changes at Tracking error responses Steady-state tracking performance for Case 2: (a) tracking errors 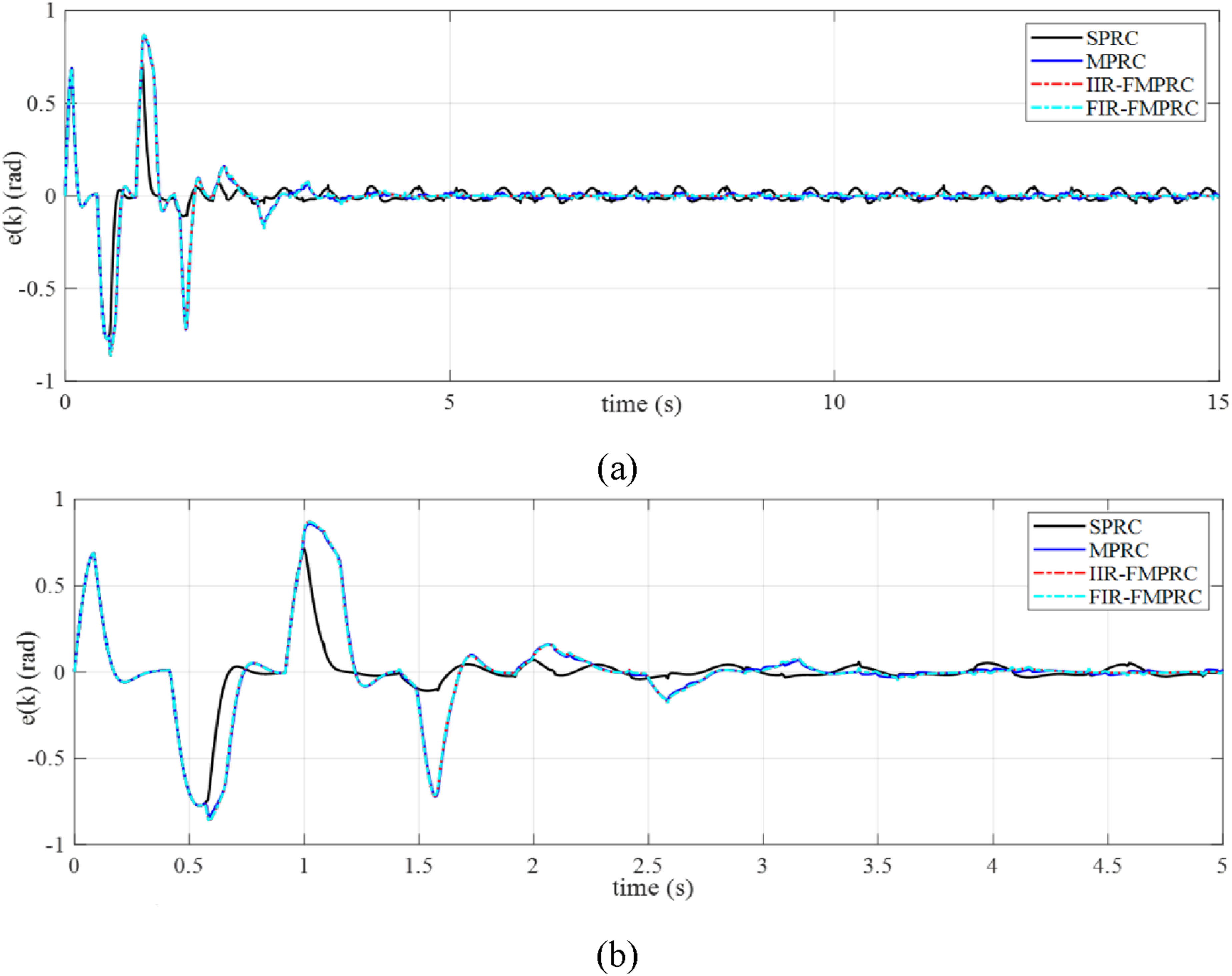
The performance metrics for Case 2 are summarized in Table 3. Similar to Case 1, SPRC achieves the smallest max-e, reflecting its faster initial transient response. However, it exhibits larger steady-state errors, as indicated by higher max-ess and rms-ess values compared to the other controllers. In contrast, both IIR-FMPRC and FIR-FMPRC provide improved steady-state accuracy, with IIR-FMPRC achieving the smallest rms-ess among all methods. From a global performance perspective, the ISU and ITAE results further clarify these differences. While SPRC shows competitive transient behavior, its larger ITAE indicates slower overall convergence. The proposed FMPRC schemes achieve lower ITAE values and maintain reduced steady-state errors, confirming their superior convergence and steady-state tracking performance under time-varying disturbance conditions.
4.3. Case 3: Tracking periodic reference
and suppressing periodic disturbance
under plant parameter variations
To further assess robustness against plant uncertainty, an additional simulation is conducted by varying all parameters of the nominal plant model in (18) by −30%. This variation represents modeling errors and practical implementation deviations. The periodic reference and disturbance signals remain the same as in Case 1 to ensure a consistent and fair comparison. All controller structures and parameters are kept identical to those used in the previous cases, allowing a direct evaluation of how SPRC, MPRC, IIR-FMPRC, and FIR-FMPRC tolerate plant perturbations without redesign or retuning. The tracking error responses for Case 3 are shown in Figure 14, including (a) the transient time response and (b) the steady-state response. Compared with Case 1, as illustrated previously in Figure 9(b), the transient responses of all methods become slower under plant parameter variations. In terms of steady-state behavior, Figure 14(b) shows a pattern similar to that observed in Case 1 in Figure 10(a), with tracking errors remaining within the range of approximately −0.05 to 0.05 rad. These results indicate that although convergence is slower under plant perturbations, the steady-state tracking accuracy remains comparable to the nominal case. Tracking error responses 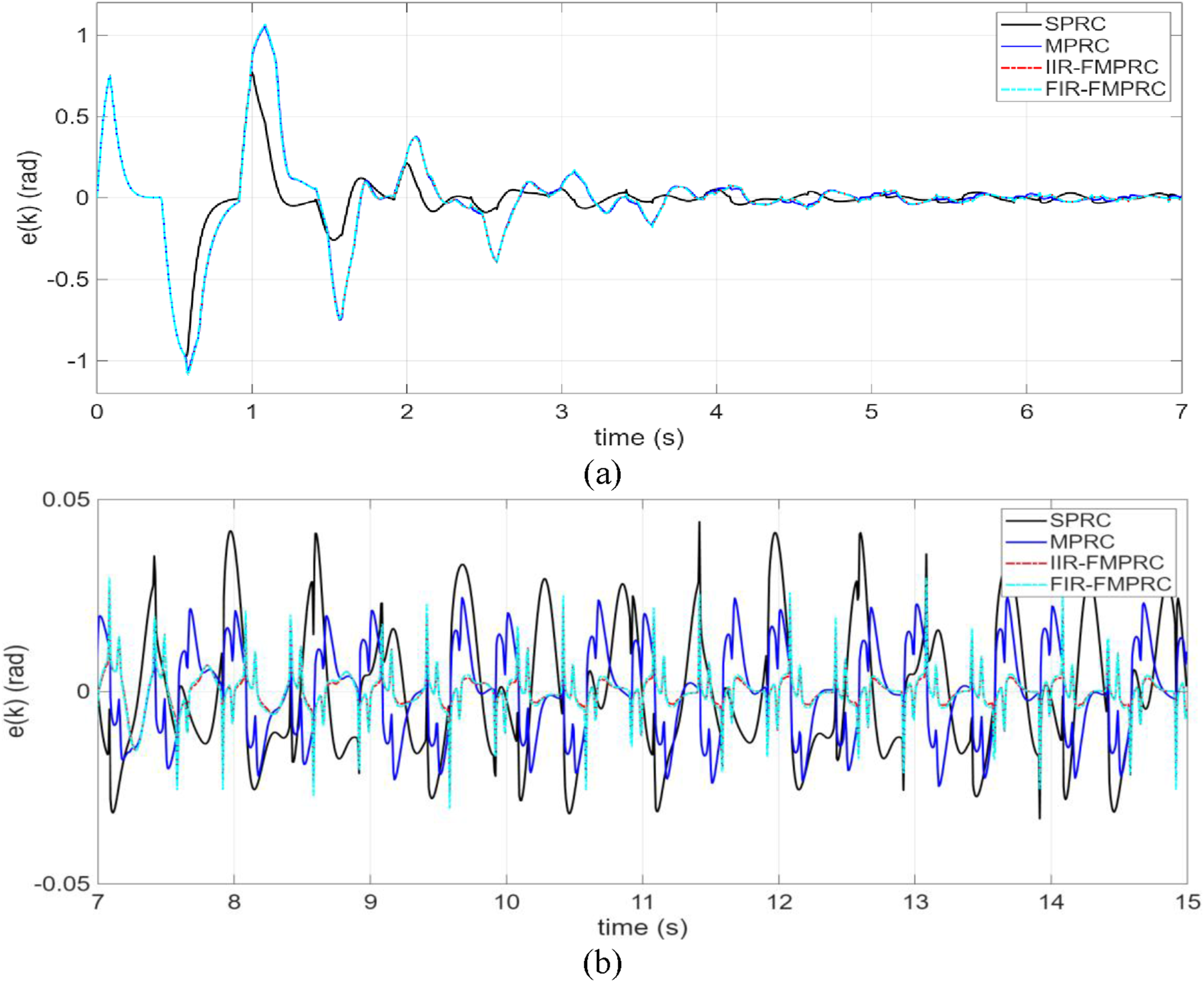
The performance metrics for Case 3 are also summarized in Table 3. Compared to Case 1, plant parameter variations of −30% lead to a general increase in error indices for all controllers, reflecting the impact of model mismatch. Similar to Case 1, SPRC achieves the smallest max-e due to its faster initial transient response. However, its steady-state errors remain larger compared to the FMPRC-based methods. Both IIR-FMPRC and FIR-FMPRC maintain improved steady-state accuracy under plant perturbation, with lower rms-ess values than SPRC and MPRC. From a global perspective, the ISU and ITAE values in Case 3 are generally larger than those in Case 1, indicating slower overall convergence due to plant parameter variations. This behavior is expected since the learning function is designed based on the nominal model, and plant perturbations reduce compensation accuracy. Nevertheless, the stability condition remains satisfied, and steady-state tracking performance is still preserved. The FMPRC schemes continue to exhibit lower steady-state errors compared to SPRC and MPRC, demonstrating that the proposed fractional-delay modeling maintains steady-state tracking performance despite plant deviations from nominal parameters.
While the proposed FMPRC demonstrates improved steady-state tracking performance, several practical limitations should be noted. The computational and implementation complexity increases with higher-order IIR/FIR filters and with a larger number of non-harmonic basis frequencies included in the internal model, since each additional basis frequency introduces extra delay elements and fractional-delay approximation blocks, thereby increasing memory usage and design complexity. Moreover, the framework assumes that the basis frequencies
5. Conclusion
This paper has presented a fractional multi-period repetitive controller (FMPRC) that enhances conventional MPRC by incorporating fractional time-delay into the internal model. By decomposing the delay into integer and fractional components and realizing the fractional delay using IIR- or FIR-based filters, the proposed FMPRC achieves accurate alignment with multiple basis frequencies, thereby reducing frequency mismatch and residual steady-state errors. Simulation results under multi-frequency, time-varying periodic disturbances, and plant perturbations demonstrate that FMPRC consistently outperforms SPRC and conventional MPRC in terms of tracking accuracy and disturbance rejection, particularly for steady-state performance. Robustness analyses under plant parameter variations further confirm that the proposed framework preserves closed-loop stability and steady-state tracking accuracy, although convergence speed may slightly degrade due to model mismatch. It should be noted that the current framework assumes the basis frequencies to be known a priori; variations or drift in these frequencies may lead to delay mismatch and degraded tracking accuracy. As a direction for future work, experimental validation using a planned dual-servo platform will be conducted, where one motor generates the reference motion and the other introduces independently adjustable periodic disturbances, including non-harmonic components. In addition, the proposed framework can be extended to scenarios involving unknown or time-varying disturbance frequencies by integrating adaptive or data-driven frequency estimation mechanisms.
Footnotes
Acknowledgments
The authors used AI-based language assistance tools for minor editing and clarity enhancement. All technical content and scientific interpretations remain the sole responsibility of the authors.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Research and Innovation Agency (BRIN), Indonesia, through the Research Assistant (RA) program No. 166/HK/II/2024.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.