
Abstract
Electronic throttle actuators operate under strong nonlinearities, parametric uncertainties, and time-varying disturbances, where discontinuous control actions may introduce chattering and undesired high-frequency oscillations that degrade tracking accuracy and aggravate mechanical excitation. This paper proposes an extended-state-observer-based discrete predictive sliding-mode control strategy (ESO-DPSMC) for sampled-data electronic throttle systems. A discrete-time tracking-error model is established via Euler discretization to support controller synthesis directly in the discrete domain. A discrete-time extended state observer is developed to reconstruct the lumped disturbance online, and boundedness of the observation error is analytically guaranteed. On this basis, an adaptive implicit discrete reaching law with a predictive term is designed to enhance robustness while attenuating chattering-related high-frequency components in the control action. Closed-loop analysis establishes stability and bounded tracking performance in the presence of uncertainties and external disturbances. Comparative experiments on an electronic throttle platform demonstrate improved tracking and disturbance rejection with smoother control action than conventional sliding-mode control, indicating effective suppression of high-frequency oscillations under complex operating conditions.
Keywords
1. Introduction
The electronic throttle (ET) is a key actuator in engine control systems (Zhai et al., 2023), regulating the throttle-plate angle for closed-loop control of intake-air mass flow. In simplified engine architectures, it may serve as the sole actuator for integrated regulation of operating state and output performance. ET controllers must therefore achieve fast tracking and strong robustness against intake disturbances and parameter variations. ET actuation is driven by motor torque transmitted through a reduction gear train to the throttle shaft. However, gear backlash, return-spring nonlinear torque, and friction (Wang and Zhu, 2022) introduce strong nonlinearities and uncertainties, posing challenges to high-precision control. Consequently, many studies have focused on improving ET dynamic response and disturbance rejection (Peng et al., 2025; Wang et al., 2024; Wang et al., 2023).
Sliding mode control (SMC) has been widely investigated for complex dynamical systems due to its robustness and strong capability in handling nonlinearities (Fang et al., 2024; Cao et al., 2024; Rahul and Hariharan, 2024). With fast response, insensitivity to parameter perturbations and external disturbances, and a relatively simple structure, SMC has also been extensively applied to electronic throttle (ET) control (Ye and Wang, 2020). Nevertheless, conventional SMC typically uses a sign function to implement switching, and the associated high-frequency switching can induce severe chattering. Chattering degrades tracking accuracy and closed-loop stability, limiting engineering deployment. Accordingly, numerous variants have been proposed to alleviate chattering while preserving robustness and improving smoothness and precision. For instance, (Guo et al., 2024) combined SMC with a nonlinear disturbance observer to estimate unknown dynamics online and provide feedforward compensation, improving manipulator tracking. Xu et al., (2024) proposed a multi-input multi-output discrete integral terminal SMC method to enhance convergence and disturbance rejection under measurement disturbances. Quan (Quan, 2024) incorporated online zero-crossing detection to adapt to parameter variations in ET systems and improve control accuracy. Despite these advances, most methods are formulated in continuous time, whereas practical controllers operate in discrete time. Direct discretization of continuous-time SMC can degrade tracking, intensify chattering, and accumulate discretization errors, potentially compromising stability. Hence, DSMC methods tailored to digital implementation (Liu and Fu, 2025; Wang and Zhu, 2023; Chen et al., 2025) and their discrete-time performance analysis have become increasingly important.
In DSMC, reaching-law design strongly influences convergence rate, chattering, and robustness. For example (Hu et al., 2024), introduced a modified exponential reaching law with adaptive regulation to accelerate convergence over a wide disturbance range. For Delta robots (Fateh and Momeni, 2024), proposed a model-free adaptive SMC in which a new reaching law reduces conservatism in the sign-function gain and avoids actuator overload. For linear induction motor drives (Ma et al., 2024), embedded an exponential reaching law into an improved variable-structure framework to speed up reaching while suppressing reaching-phase oscillations. For PMSM speed regulation (Wang et al., 2024), developed a state-dependent variable-gain reaching law to achieve finite-time convergence and alleviate chattering. Despite these advances, many reaching laws are still derived in continuous time or implemented via explicit updates; when realized directly in discrete time, they may amplify switching jumps, aggravate chattering, and accumulate discretization errors, limiting suitability for high-precision digital actuators. To fill this gap, this paper proposes an adaptive implicit discrete reaching law that employs implicit updates to smooth discrete switching and adaptive regulation to enhance convergence speed and robustness.
Beyond the reaching law, sliding-surface design is equally important because it determines the closed-loop dynamics: once the state reaches the surface, the motion is governed by the surface dynamics (Janardhanan and Kariwala, 2008). To improve response and reduce chattering, DSMC variants such as discrete fast terminal sliding mode control (DFTSMC) (Hu and Wang, 2019) and discrete integral sliding mode control (Rubagotti et al., 2024) have been proposed and can achieve satisfactory performance in specific scenarios. Nevertheless, no single method resolves all practical issues. Moreover, many sliding-mode strategies rely on the equivalent-control term, whose accurate computation typically requires high-fidelity modeling or additional design effort. Consequently, composite schemes that integrate model predictive control (MPC) and sliding mode control (SMC) have attracted increasing attention. Abidi et al. (Abidi et al., 2006) investigated discrete-time integral sliding-mode control, Abdennebi et al. (Abdennebi et al., 2013) proposed a new sliding function for discrete predictive sliding-mode control of time-delay systems, and Zhang et al. (Zhang et al. 2019) developed a predictive DSMC that uses a multi-input chattering-free reaching law as the reference trajectory and applied it to networked control systems. Compared with single-controller structures, composite architectures generally accommodate a wider range of operating conditions. Disturbance observers have likewise been incorporated to enhance disturbance rejection. Sun et al. (Sun et al. 2024) combined an improved back-EMF observer with an extended state observer for sensorless robust control, whereas Hou et al. (Hou et al. 2024) developed an enhanced nonlinear extended state observer to estimate motor speed under measurement noise. Rsetam et al. (Rsetam et al., 2020) proposed a cascaded ESO-based sliding-mode control method for underactuated flexible joint robots, while Rsetam et al. (Rsetam et al., 2022) developed a robust adaptive ADRC method with an additional continuous sliding-mode component for electric furnaces. Later, Rsetam et al. (Rsetam et al., 2024) investigated adaptive ADRC for vehicle steer-by-wire systems under communication delays. More recently, Khan et al. (Khan et al., 2025) proposed an ESO-based adaptive fixed-time integral sliding-mode control method for flexible joint robots, and Rsetam et al. (Rsetam et al., 2025) developed a GPIO-based continuous sliding-mode control method for networked servo systems with communication delays. In addition, Mahmood et al. (Mahmood et al., 2024) designed an ESO for uncertainty estimation in an electronic throttle valve system. However, most existing ESO-based studies mainly focus on disturbance estimation or compensation, while their integration with constrained predictive sliding-mode control for sampled-data ET systems remains insufficient.
Robust constrained and predictive sliding-mode control methods have also been reported. Farbood et al. (Farbood et al., 2022) proposed a fuzzy Lyapunov-based predictive sliding-mode control method with recursive feasibility, Farbood et al. (Farbood et al., 2024) developed a relaxed nonquadratic
Based on these considerations, this paper proposes an extended-state-observer-based discrete predictive sliding-mode control method (ESO-DPSMC) for electronic throttle systems. Different from a simple combination of ESO, DSMC, and MPC, the proposed method couples a modified discrete-time extended state observer, an adaptive implicit discrete reaching law, and a constrained predictive sliding-mode optimization framework. Specifically, the DTESO estimates lumped disturbances online, the adaptive reaching law generates a smooth reference sliding-mode trajectory, and the predictive controller implicitly computes the equivalent control action under input and input-rate constraints. As a result, the proposed controller achieves fast, smooth, and robust tracking in the discrete-time domain while suppressing chattering-related high-frequency oscillations. Its effectiveness is evaluated against a discrete fast terminal sliding-mode controller (DFTSMC) and a discrete linear sliding-mode controller (DLSMC). The main contributions are summarized as follows. 1. To address nonlinearities, uncertainties, and external disturbances in electronic throttle systems, this paper proposes an ESO-DPSMC strategy formulated directly in the discrete-time domain. Different from conventional explicit or fixed-gain reaching laws, the proposed adaptive implicit discrete reaching law adjusts the convergence behavior of the sliding variable according to the error dynamics, thereby improving transient response while attenuating chattering-related high-frequency oscillations. 2. A constrained predictive sliding-mode framework is developed, in which the sliding-mode reference trajectory is generated by the adaptive reaching law and the control sequence is computed through receding-horizon optimization. In this way, the equivalent control component is obtained implicitly from the MPC optimization rather than being separately derived, enabling explicit handling of input magnitude and input-rate constraints. 3. A modified DTESO is designed for the sampled-data ET system. Unlike conventional ESO structures that mainly use position estimation error, the proposed observer incorporates both throttle-opening error and opening-rate estimation error into the correction mechanism, providing additional tuning freedom and improving online lumped-disturbance estimation.
The remainder of this paper is organized as follows. Section 2 derives a discrete-time dynamic model of the electronic throttle system. Section 3 presents the ESO-DPSMC design and the associated stability analysis. Sections 4 report numerical simulations and experimental tests, respectively, including comparative evaluations against DFTSMC and DLSMC. Section 5 concludes the paper.
2. Modeling of the electronic throttle (ET) system
The electronic throttle (ET) regulates intake airflow by controlling the throttle-plate opening. As shown in Figure 1, it consists of an electrical actuation unit and a mechanical transmission unit. The control input is generated by the ECU, and the controller produces a PWM signal to ensure accurate and smooth tracking. The ET dynamics are described by (Gao et al., 2020) Structure of the electronic throttle (ET) system.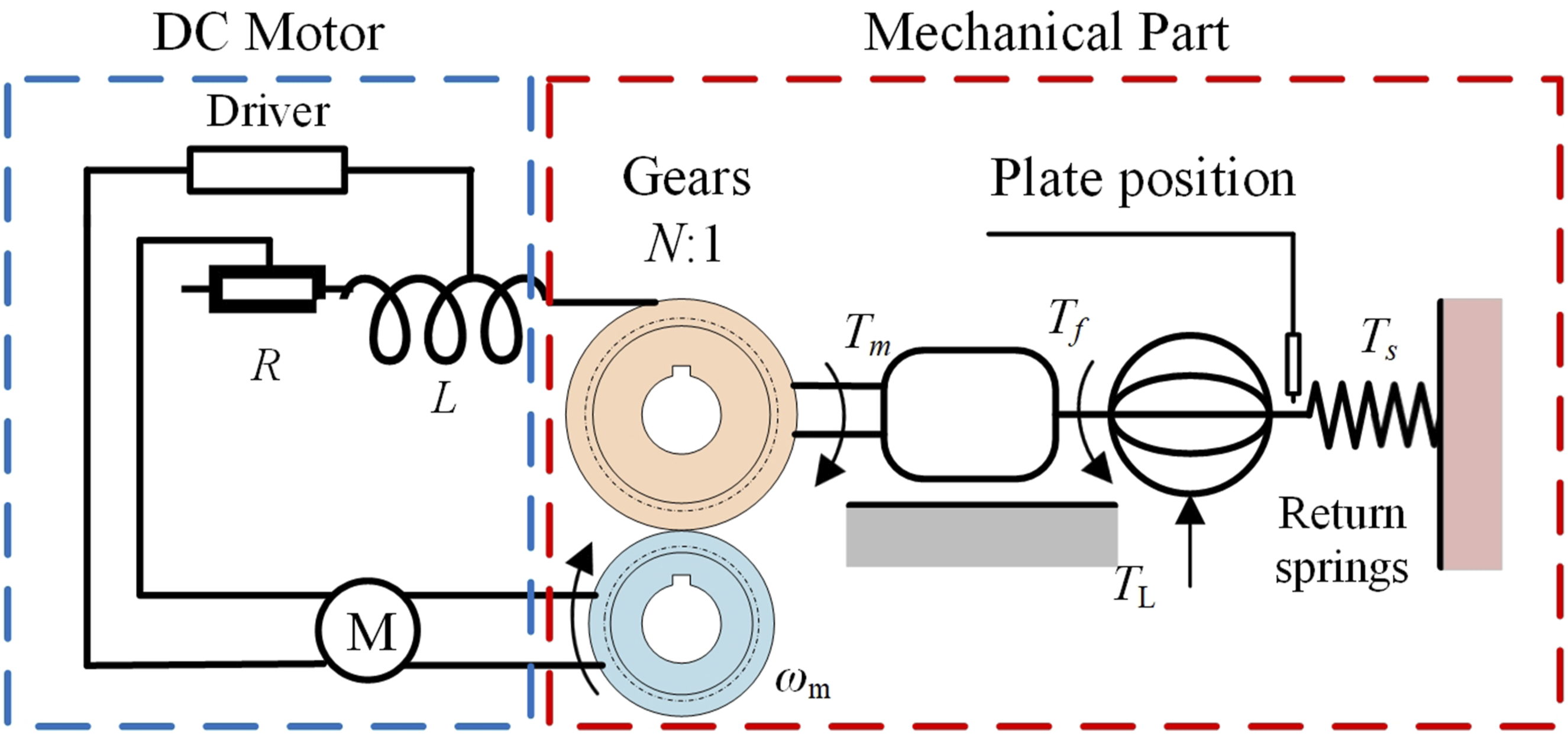


According to Newton’s second law, noting that the friction torque comprises Coulomb and viscous components and that the return-spring torque is discontinuous, the torque-balance equations for the throttle body, reduction gear train, and return-spring/friction elements are formulated as follows



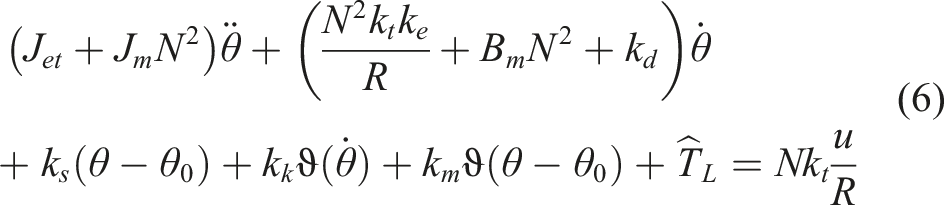
Considering parametric uncertainties in the nonlinear ET model obtained by combining equations (1)–(5), equation (6) can be rewritten as

Let the system state variables

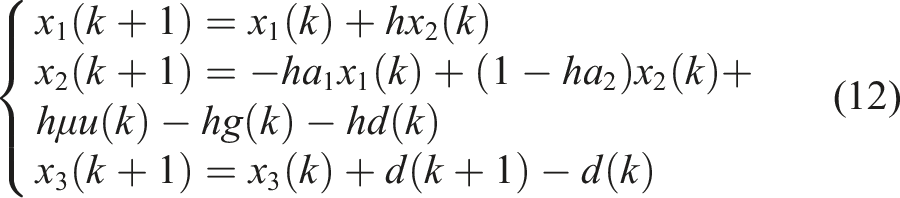
Since practical controllers are typically implemented on digital platforms, the control law is designed in discrete time. Discretizing the continuous-time tracking-error model in equation (8) by the explicit Euler method yields the following discrete-time model (Hu et al., 2022)


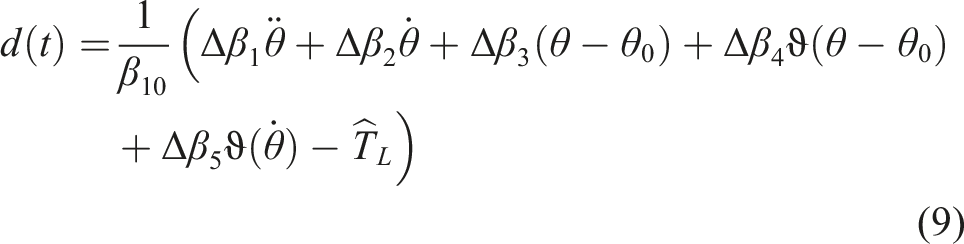
The lumped disturbance
For the discretized ET system, the disturbance term and its variation are bounded (Yang et al., 2018), that is,
Remark 1. Roles of the assumptions. Assumption 1 provides the theoretical basis for treating parametric uncertainties and external load effects as a bounded lumped disturbance, which is required for the DTESO error-boundedness analysis. Assumption 2 is used in the discrete-time controller design and stability analysis, ensuring that the disturbance variation over one sampling interval remains bounded. In addition, the physical voltage limitation and input-rate constraints provide the constraint basis for the subsequent controller design, ensuring that the control input remains within the admissible operating range of the ET actuator. These assumptions and constraints help connect the physical ET system, the DTESO design, and the constrained ESO-DPSMC stability analysis.
3. Design of the ESO-DPSMC
3.1. Discrete-time extended state observer
To enhance the disturbance rejection capability of the system, a discrete-time extended state observer (DTESO) is designed to estimate disturbances. The lumped disturbance
Based on the ESO design in (Han, 2009), the following DTESO is designed for the sampled-data ET system

Define


From (17), we obtain

Then (18), can be rewritten as
3.2. Predictive sliding-mode model
The controller design consists of two components: sliding-surface selection and reaching-law design. To ensure rapid and accurate convergence of the system states to the equilibrium, the following nonlinear sliding surface is adopted

Based on (21), the sliding-mode function

Substituting (10) into (22) yields

Let

Based on (10), (21), and (24), the derivation can be continued to obtain the
By iteratively propagating the forward prediction equations, the output signal of the predictive sliding-mode model,


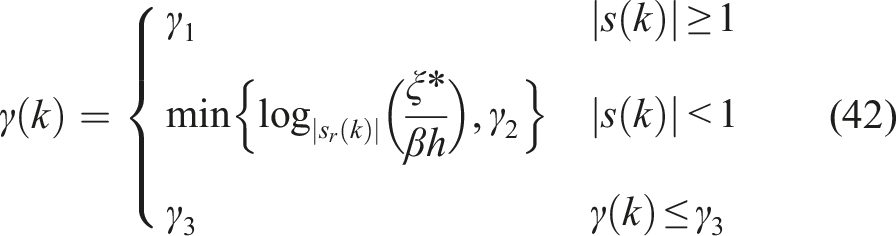
3.3. Design of the reference sliding-mode trajectory
Unlike conventional DSMC strategies based on reaching laws, this work designs a reference trajectory for the sliding-mode state. The selection of a sliding-mode reference trajectory is flexible, and various forms can be adopted to guarantee strong continuity of the system and to address the issue that fixed switching-gain parameters in the switching term may lead to an unfavorable trade-off between convergence and chattering. Define


Then, starting from
Since





as:

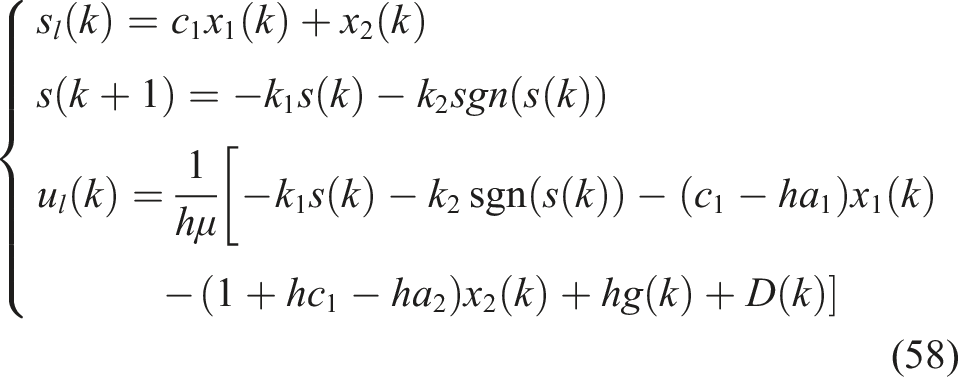
3.4. Design of the DPSMC controller
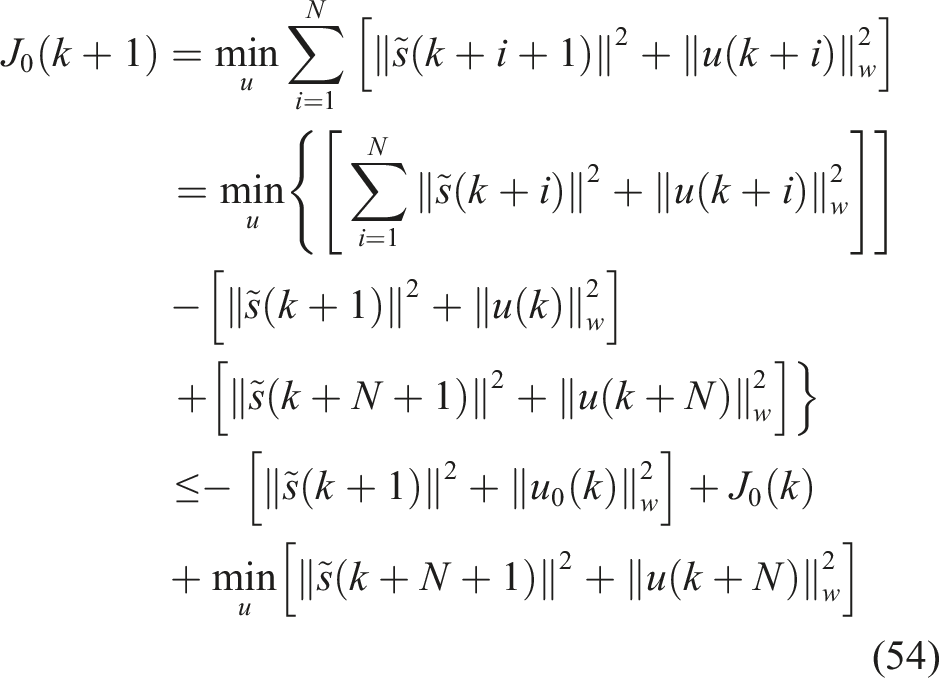
The optimal control input is obtained by minimizing a prescribed objective function over the control horizon. Based on the predictive sliding-mode model in (26) and the reference trajectory in (43), the cost function at time instant k is defined as follows:


The constraints on the magnitude and rate of change of the control input can be formulated as follows:

Based on the receding-horizon optimization in (45) together with the constraints in (46), the proposed constrained discrete-time predictive sliding mode control problem can be transformed into the following quadratic programming (QP) problem.

Since the error-related terms
3.5. Stability analysis
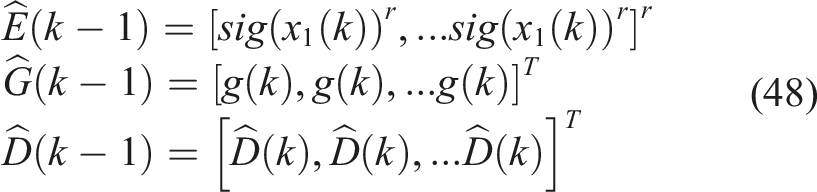
Based on the terminal constraint approach in (44), the constrained cost function can be transformed into:

The overall block diagram of the proposed control scheme is shown in Figure 2. Block diagram of the proposed ESO-DPSMC for the ET system.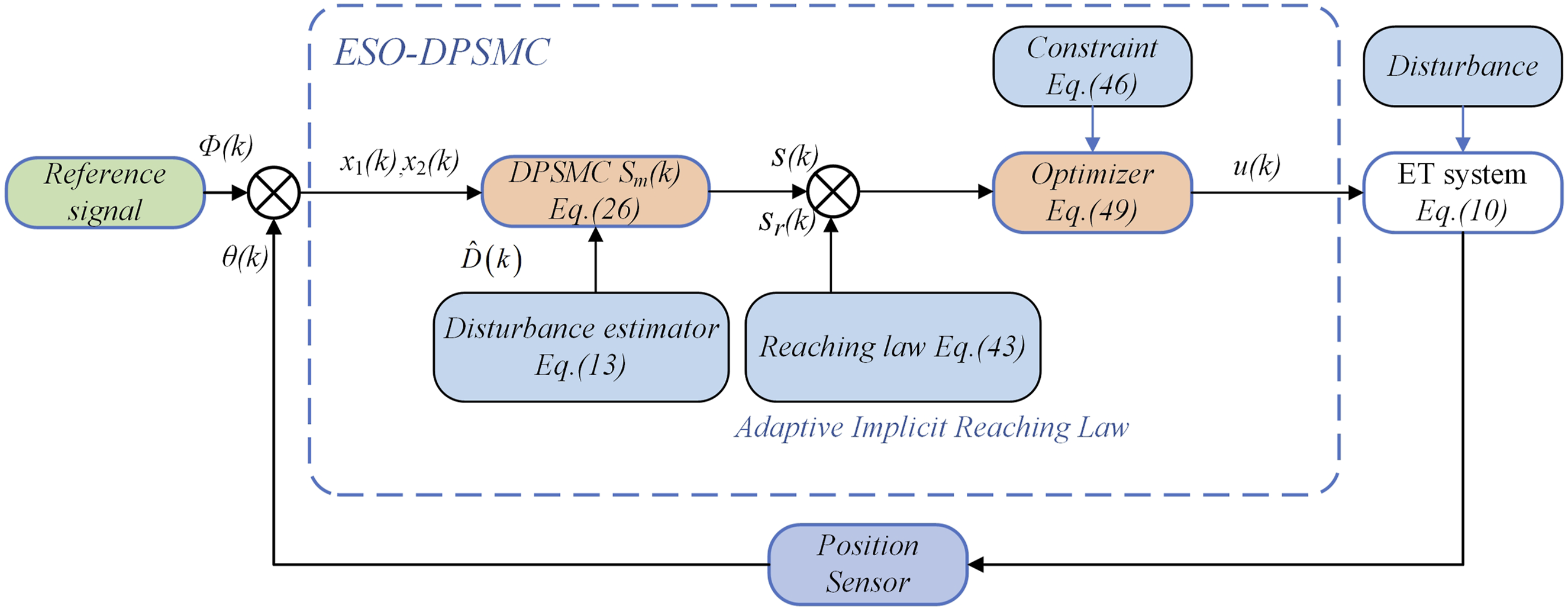
Subject to the following constraints on the control input and the sliding-mode state:



Then, at time instant

The corresponding optimal value of the cost function is
By enforcing the terminal constraint (52), we can guarantee that

Since

This indicates that
Remark 3. The proposed ESO-DPSMC strategy is not a direct combination of ESO, DSMC, and predictive control. The modified DTESO is designed for the sampled-data ET tracking-error model and uses both the throttle-opening error and opening-rate estimation error for disturbance correction. In addition, a smooth reference sliding-mode trajectory is generated by the adaptive implicit discrete reaching law, and the equivalent control action is obtained through constrained receding-horizon optimization. Therefore, the novelty of the proposed method lies in the ET-oriented integration of DTESO, adaptive implicit reaching law, and constrained predictive sliding-mode optimization, which improves tracking accuracy, disturbance rejection, and chattering suppression in digital implementation.
4. Experimental study
4.1. Simulation verification of the DTESO
To directly evaluate the estimation quality of the proposed DTESO in equation (13), a simulation verification was conducted before the experimental tests. Since the actual lumped disturbance in the experimental ET platform is difficult to measure directly, the true disturbance is compared with the DTESO estimate in simulation, where the disturbance signal is known. Figure 3 shows the actual lumped disturbance Disturbance estimation performance of the DTESO.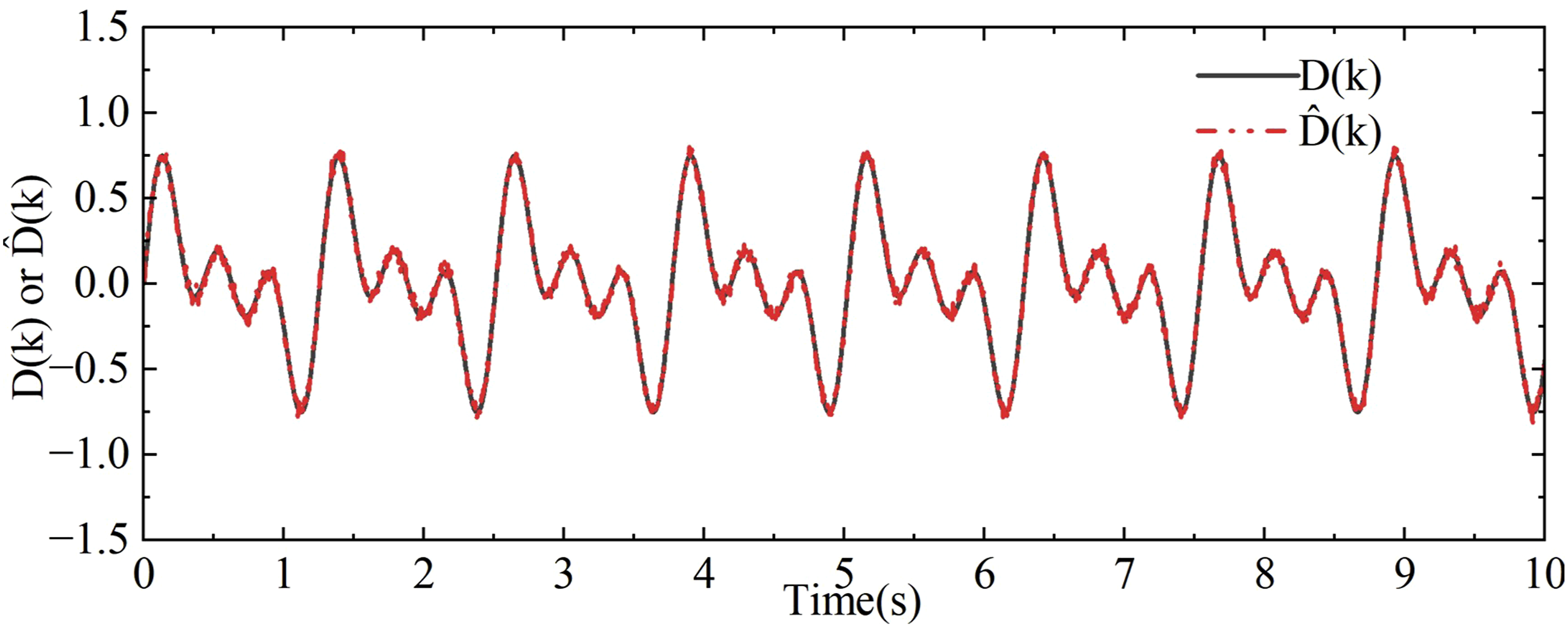
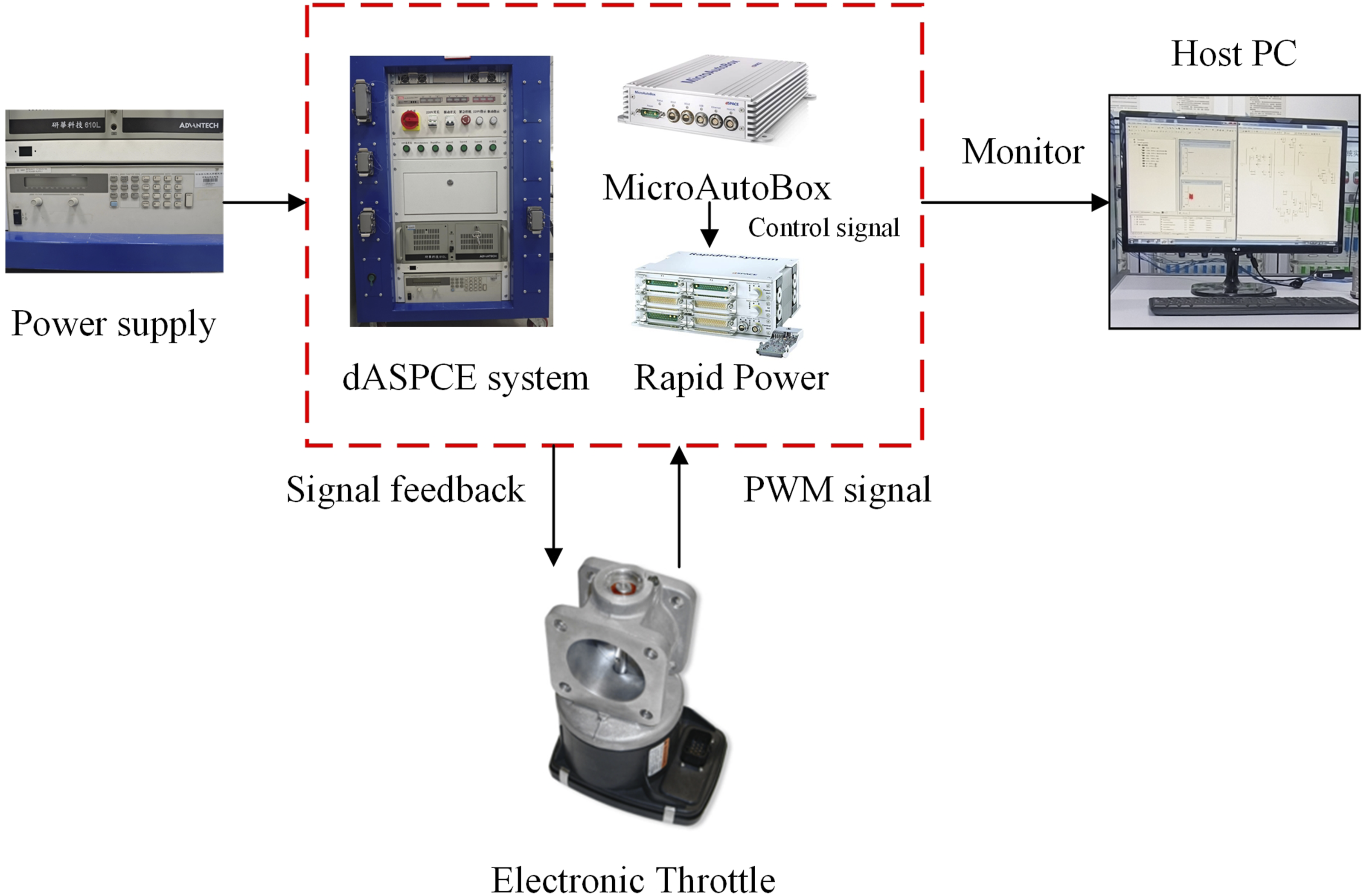
4.2. Experimental setup
To further assess the tracking and disturbance-rejection performance of the proposed ESO-DPSMC on a practical electronic throttle (ET) system, experiments were performed on a dedicated hardware-in-the-loop (HIL) platform and compared with DFTSMC and DLSMC. The platform was built in Matlab/Simulink using the dSPACE real-time development system. As shown in Figure 4, a Bosch 028750156 electronic throttle body was used as the plant. The hardware comprised a dSPACE MicroAutoBox, a RapidPro unit, a dedicated power-supply module, and a host PC. Figure 5 shows the control architecture: the MicroAutoBox executes the control algorithm in real time and acquires the throttle-angle signal via the A/D interface, whereas the RapidPro delivers the motor driving voltage as 10-kHz PWM. This platform provides low-latency execution, well-configured I/O, and accurate data acquisition, enabling reliable evaluation of tracking and disturbance-rejection performance on real hardware. dSPACE experiment platform of ET system. Schematic diagram of dSPACE system.
Nominal parameters of the ET system.

To comparatively evaluate the performance of the proposed control strategy, the discrete fast terminal sliding-mode controller (DFTSMC) (Li et al., 2021) and the discrete linear sliding-mode (DLSMC) (Xiao et al., 2024) were selected as benchmark methods in the experiments. All three controllers employed the same parameter settings as those used in the numerical simulations to ensure consistency between the experimental and simulation results.
For the ET system (10), the sliding surfaces and control laws for DFTSMC, DLSMC are designed as follows
To ensure a fair and meaningful comparison, DFTSMC and DLSMC are selected as benchmark methods because they represent two typical discrete sliding-mode control structures for nonlinear actuator systems. DFTSMC uses a nonlinear fast terminal sliding surface and provides fast convergence, while DLSMC uses a conventional linear sliding surface and serves as a basic discrete sliding-mode baseline. All controllers are tested under the same ET platform, sampling period, reference commands, disturbance settings, input constraints, and evaluation indices. Parameters with similar roles are set to identical or comparable values where possible, and DFTSMC and DLSMC employ the same discrete reaching law to avoid bias caused by different reaching mechanisms.
Parameters of the three SMCs.

Moreover, to better reflect practical operating conditions, external disturbances are introduced in the simulation/experiment. Specifically, a composite sinusoidal disturbance is applied:
In the same set of experiments, the DTESO is implemented with the error-weighting factors selected as
In ESO-DPSMC, receding-horizon optimization based on the discrete-time throttle model generates the optimal equivalent control under input constraints, thereby ensuring smooth, accurate, and robust tracking.
4.3. Experimental results
To better characterize the control performance of different controllers, the maximum steady-state error 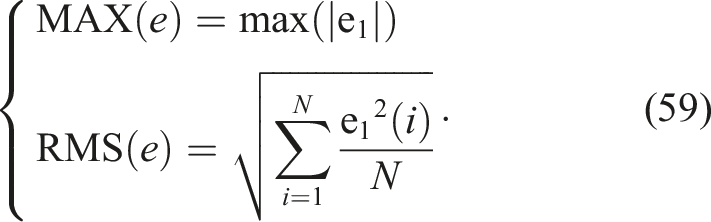
The experimental results for Case 1 are shown in Figure 6 to assess the step-tracking performance of the proposed ESO-DPSMC controller. As illustrated in Figure 6(a), ESO-DPSMC responds rapidly to step commands with different amplitudes, achieving a settling time of approximately 120 ms. By comparison, DFTSMC settles in about 160 ms, whereas DLSMC exhibits the slowest response; for the larger step command, its settling time exceeds 320 ms. These results demonstrate that ESO-DPSMC provides substantially faster convergence than the other two discrete sliding-mode controllers. The improvement is mainly attributed to the proposed adaptive implicit discrete reaching law, which imposes stronger convergence action when the state is farther from the sliding surface, thereby accelerating the transient process. Experimental comparison in Case 1. (a) Position tracking results. (b) Tracking error.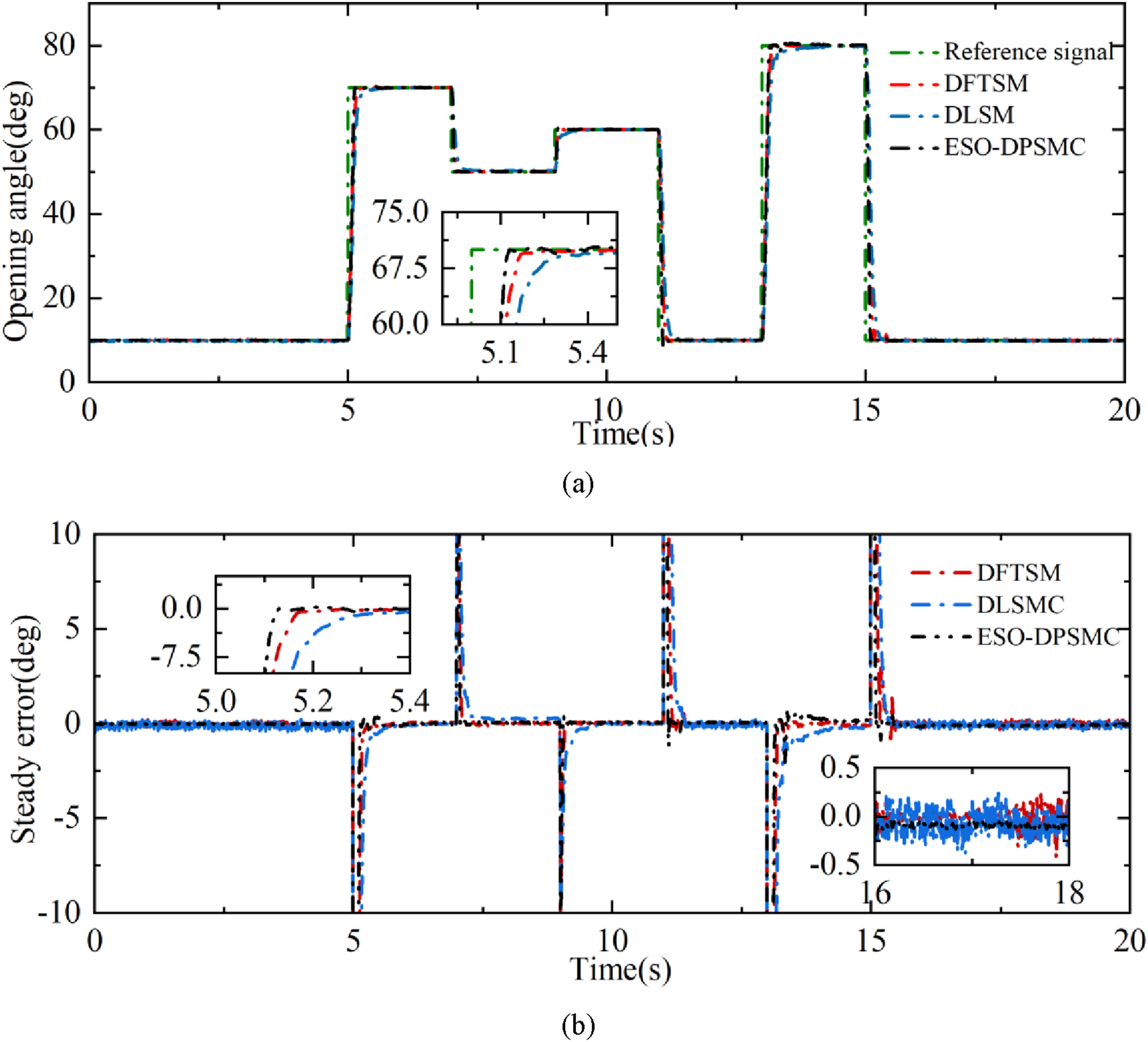
The steady-state performance shown in Figure 6(b) further reveals clear differences among the controllers after the system enters the steady tracking phase (e.g.,
These differences mainly arise from the controller structures. ESO-DPSMC uses an extended state observer to estimate lumped disturbances online and compensates them in a feedforward manner, thereby reducing the disturbance acting on the sliding manifold. This weakens the dependence on the switching term and significantly improves steady-state accuracy. In contrast, DFTSMC mainly relies on the inherent robustness of sliding-mode control, so residual errors remain under persistent disturbances. DLSMC, with a linear sliding surface, provides weaker rejection of nonlinear disturbances, resulting in the larger steady-state fluctuations in Figure 6(b). Overall, ESO-DPSMC yields smaller errors and smoother error trajectories, demonstrating better disturbance rejection and higher tracking precision.
To further show the reaching behavior of the sliding surface, the sliding variable responses in Case 1 are plotted in Figure 7(a). The sliding variables show transient peaks at the step-switching instants and then rapidly return to a small neighborhood of zero. This indicates that the sliding. Figure 7(b) compares the control voltages of the three controllers. ESO-DPSMC produces a relatively larger transient voltage at step changes because its adaptive reaching-law gain increases with tracking error, thereby accelerating convergence. In steady state, its control input becomes smoother and exhibits less oscillation than DFTSMC and DLSMC, indicating effective chattering reduction and good compatibility with input-constrained actuators. Overall, ESO-DPSMC shows superior transient performance, steady-state accuracy, and disturbance rejection, making it a more robust controller for practical electronic throttle systems. Control voltage comparison in Case 1. (a) Sliding variable. (b) Control voltage.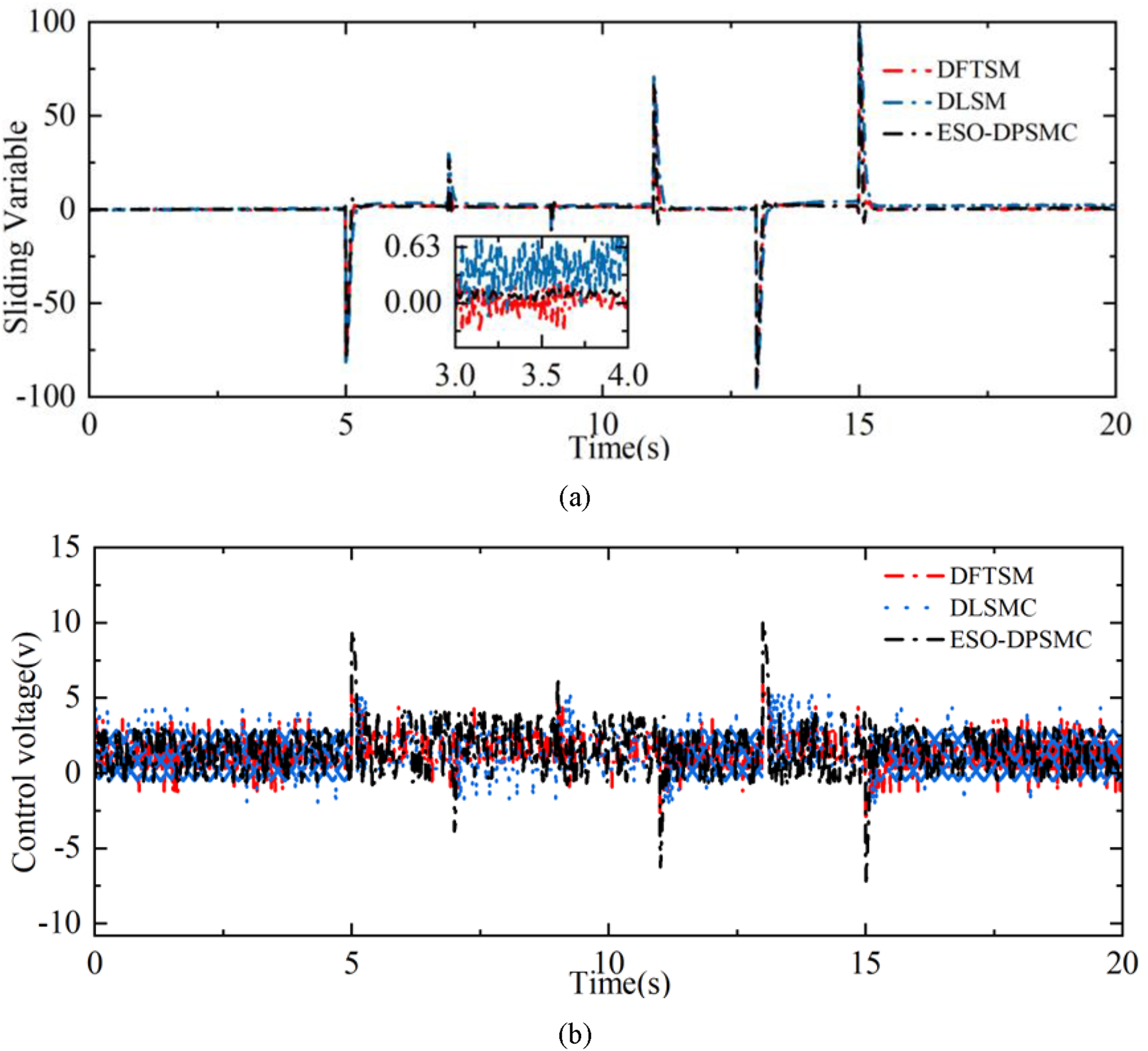
As shown in Figure 8(a), Case 2 adopts a sinusoidal reference to represent small periodic throttle-opening fluctuations under steady operating conditions. Although all three controllers track the periodic command, their accuracies differ significantly. ESO-DPSMC follows the sinusoid most closely, with negligible phase lag and a smooth trajectory. DFTSMC shows slight lag in rapidly varying regions, while DLSMC exhibits larger deviations, particularly near the peaks. These results confirm the superior dynamic response and tracking performance of ESO-DPSMC for periodic references. Experimental comparison in Case 2. (a) Position tracking results. (b) Tracking error.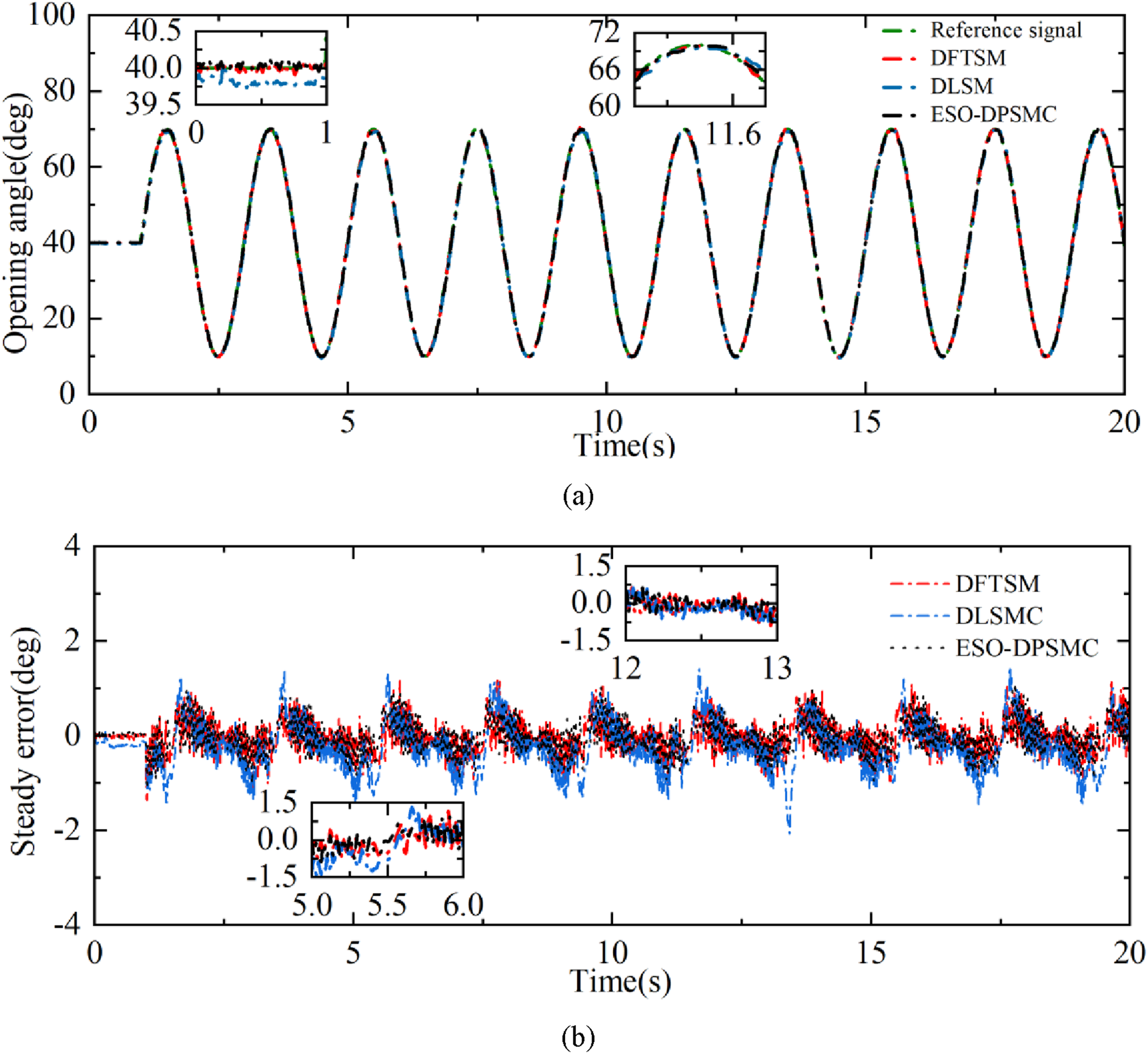
Figure 8(b) summarizes the average tracking errors over the entire sinusoidal period for the three algorithms. It can be observed that ESO-DPSMC achieves substantially lower steady-state errors than the other two controllers, with average
The sliding variable responses under the sinusoidal reference are shown in Figure 9(a). The sliding variables fluctuate periodically but remain within a bounded neighborhood of zero, indicating that the sliding surface remains bounded under continuously varying reference conditions. As shown in Figure 9(b), ESO-DPSMC produces the smoothest control voltage with the least fluctuation and quickly suppresses transient oscillations, demonstrating better overall stability than DFTSMC and DLSMC. Control voltage comparison in Case 2. (a) Sliding variable. (b) Control voltage.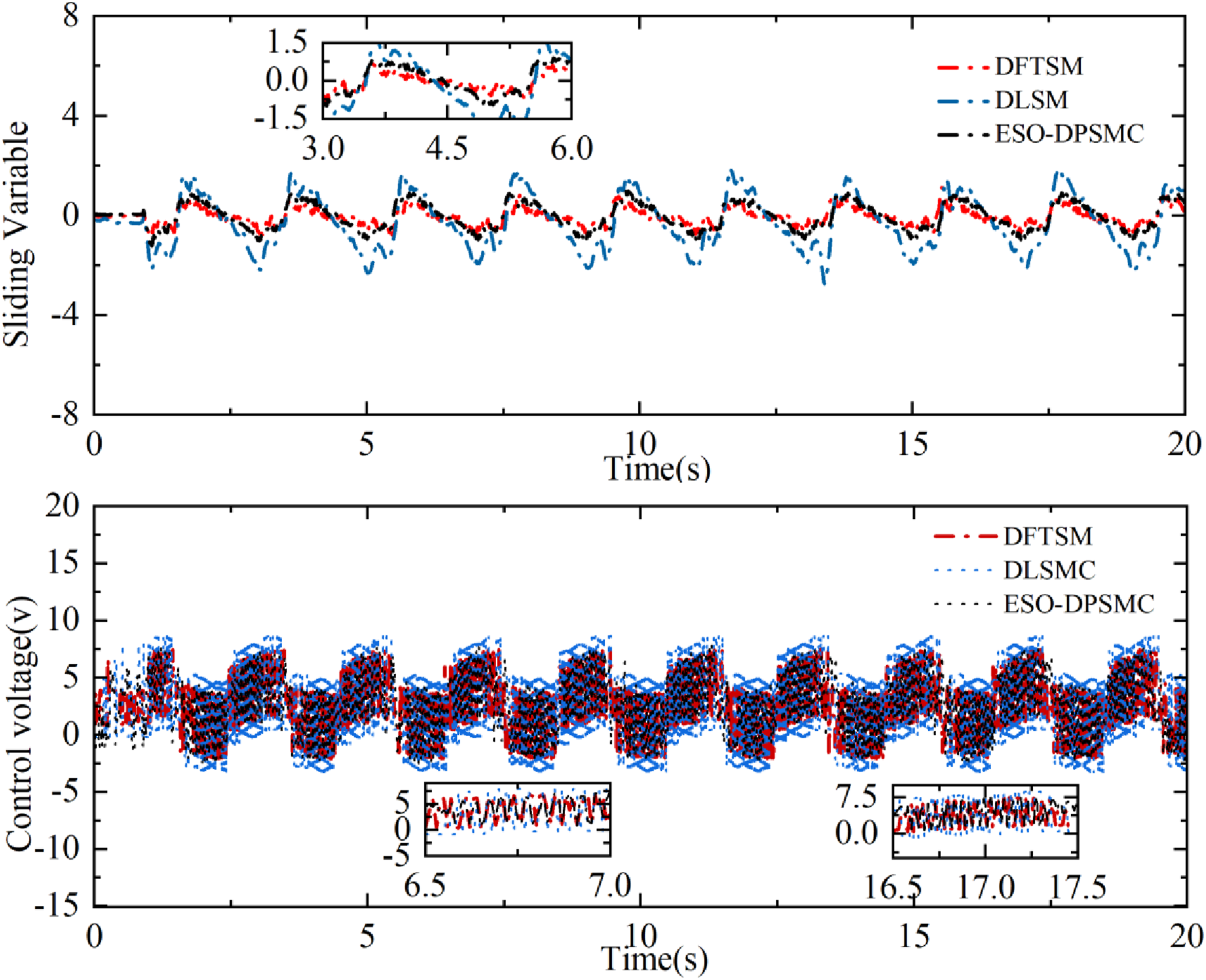
Performance of four controllers under different inputs.
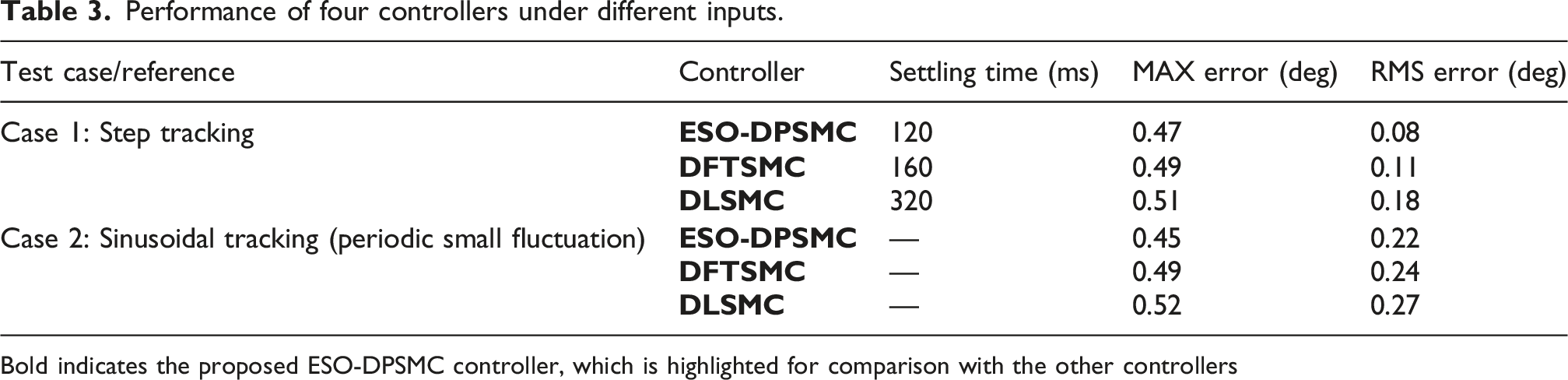
Bold indicates the proposed ESO-DPSMC controller, which is highlighted for comparison with the other controllers
The ITAE and ISU indices are further calculated to evaluate the convergence performance and control energy consumption. The proposed ESO-DPSMC achieves the lowest overall ITAE among the three controllers, indicating better overall error convergence. Although the ISU of ESO-DPSMC is not always the minimum in every test case, it remains within an acceptable range. This is because the proposed controller applies stronger transient control action to achieve faster convergence and better tracking accuracy. Therefore, ESO-DPSMC provides a favorable tradeoff among convergence speed, tracking accuracy, and control energy consumption.
The simulation and experimental results show consistent performance trends: ESO-DPSMC achieves faster convergence and smaller tracking error than DFTSMC and DLSMC, while the experimental results contain slightly larger fluctuations due to sensor noise, PWM delay, unmodeled friction, backlash, and hardware uncertainties.
5. Conclusions
This paper investigates high-precision tracking control of an electronic throttle (ET) system subject to parametric uncertainties, nonlinear friction, and external disturbances, and proposes an extended-state-observer-based discrete predictive sliding-mode control method (ESO-DPSMC). A discrete-time error model is established, and an extended state observer is introduced to estimate lumped disturbances online and improve robustness. Combined with an adaptive implicit discrete reaching law and receding-horizon optimization, the proposed framework explicitly handles input constraints and reduces chattering.
Simulation and experimental results show that ESO-DPSMC outperforms DFTSMC and DLSMC in both step and sinusoidal tracking, with faster convergence, smaller steady-state errors, and stronger disturbance rejection. It also produces smoother control inputs and weaker steady-state oscillations under backlash and friction nonlinearities. These results demonstrate the superiority of ESO-DPSMC in transient response, accuracy, robustness, and digital implementation. Although the proposed ESO-DPSMC strategy improves control performance, several practical issues still need to be considered. The online QP introduces additional computational burden, and its real-time implementation depends on the sampling period, prediction horizon, and processor capability. Moreover, the DTESO and adaptive reaching law require proper parameter tuning, and the control performance may degrade under severe actuator constraints, strong measurement noise, or disturbances beyond the observer bandwidth. Future work will focus on computational reduction, systematic parameter tuning, and further hardware-in-the-loop or real-time validation.
Footnotes
Author contributions
Jiang Jiahui: Conceptualization, Methodology, Validation; Yao Chong*: Supervision, Project administration, Writing—Review & Editing; Long Yun: Formal analysis, Investigation, Data curation; Zhang Naifu: Software, Experiments, Writing—Original Draft.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.