
Abstract
Quadrotor trajectory tracking under wind gusts and ground effect remains challenging due to unknown disturbances, model uncertainties, and the system’s underactuated nature. This paper presents an adaptive fractional-order terminal integral sliding mode control (AFOTISMC) to address these challenges. The controller integrates fractional-order Riemann-Liouville operators into an integral terminal sliding surface, ensuring finite-time convergence while eliminating chattering and singularity. Adaptive laws estimate unknown disturbance bounds without requiring prior knowledge. Lyapunov analysis proves global finite-time stability. Comprehensive simulations under wind-like disturbances, 30% parametric uncertainties in mass and inertia, and ground effect show that AFOTISMC reduces Integral Absolute Error (IAE) by up to 53% for position and 77% for yaw compared to conventional SMC, and by 12–31% compared to recent fractional-order SMC methods. Control energy consumption is reduced by 20–40% across all channels. These results confirm the practical significance of AFOTISMC for safe quadrotor operation in real-world windy environments and during landing in ground effect.
Keywords
1. Introduction
Research on unmanned aerial vehicles (UAVs) has highlighted their growing prominence in the field. Compared to fixed-wing aircraft and conventional rotor helicopters, quadrotor UAVs offer superior flexibility, speed, compact size, and cost-effectiveness (Wei et al., 2026). In the aftermath of natural disasters, quadrotor UAVs enhance disaster relief efforts by accessing areas that may be unreachable by humans. Their vertical take-off and landing (VTOL) capability (Golchin et al., 2025), combined with agile maneuverability, makes them particularly advantageous for a variety of missions, including delivery, mapping, agriculture, and search and rescue (Idrissi et al., 2022; Imran et al., 2023; Kashi et al., 2025; Mazare et al., 2024; Nekoukar and Dehkordi, 2021). Despite these advantages, controlling quadrotor UAVs presents several challenges. First, the quadrotor is an underactuated mechanical system, with four control inputs required to maintain six outputs. Second, its dynamics are highly nonlinear, characterized by strongly coupled states and multiple-input multiple-output (MIMO) interactions (Li et al., 2025). Third, during flight, the quadrotor is affected by various factors, including model uncertainties (such as the moment of inertia), external disturbances (like wind (Zhou et al., 2026)), sensor measurement noises, and time delays (Emran and Najjaran, 2018; Ghadiri et al., 2023; Imran et al., 2023; Iriarte et al., 2024; Zhang and Wu, 2025). These uncertainties and unwanted factors can lead to weak performance and even instability in the system’s operation (Ghadiri and Jahed-Motlagh, 2016). Consequently, controlling of a quadrotor requires high-precision control for both attitude and position control (Alqudsi et al., 2023; Chen et al., 2016; Eliker and Zhang, 2020; Ghadiri et al., 2023; Liu and Cai, 2023; Mellinger et al., 2012; Sun et al., 2020; Wang et al., 2019). In early research on quadrotor control, conventional linear approaches, such as proportional-integral-derivative (PID) (Lopez-Sanchez and Moreno-Valenzuela, 2023; Salih et al., 2010) and linear quadratic regulator (LQR) (Rinaldi et al., 2013) were commonly used. However, these linear control methods assess the stability of the quadrotor without accounting for undesirable factors, leading to suboptimal tracking accuracy and robustness. To address the limitations of these linear techniques, various advanced control schemes have been proposed by researchers to enhance the tracking performance of quadrotor flight control systems. These include adaptive control (Chen et al., 2022; Dydek et al., 2012; Eliker and Zhang, 2020; Li et al., 2022; Nekoukar and Dehkordi, 2021), sliding mode control (SMC) (Shi et al., 2019; Vahdanipour and Khodabandeh, 2023; Wang et al., 2019), H-∞ control (Ortiz et al., 2016), backstepping control (Chen et al., 2016; Eliker and Zhang, 2020; Shi et al., 2019), model predictive control (Erüst et al., 2026; Xu et al., 2023), and fuzzy control (Li et al., 2022).
Among the controllers listed above, the sliding mode control (SMC) is particularly well-suited for addressing challenges such as wind gusts and parametric uncertainties, which are common in quadrotor operations. SMC’s inherent robustness, along with its simplicity in design, makes it an attractive option for achieving reliable stability and performance in uncertain environments (El Hajjami et al., 2023; Ghadiri et al., 2022; Rahmanipour and Ghadiri, 2020). While SMC offers several advantages, including asymptotic response and strong robustness, it has some drawbacks, such as the requirement to know the upper bound of disturbances, chattering (a phenomenon that causes undesirable vibrations), and reduced robustness during the reaching phase (Chen et al., 2022). To address these issues, various techniques has been developed, including the boundary layer approach and higher-order sliding mode control. To mitigate chattering, methods such as using saturation or hyperbolic tangent instead of signum function have been applied to quadrotor (Guo and Ma, 2019; Ríos et al., 2018), as well as the adoption of terminal SMC (TSMC) (Wang et al., 2016), super-twisting SMC (Ghadiri et al., 2021), and fast TSMC (FTSMC) (Tripathi et al., 2022). By carefully balancing the trade-offs between robustness and chattering, SMC can be effectively applied to quadrotor control systems, enabling accurate and reliable trajectory tracking, even with the external disturbances.
Recent researches have consistently demonstrated the superior performance of TSMC family algorithms compared to other SMC approaches. Variants of TSMC offer several advantages, including faster convergence rates, reduced chattering, and enhanced robustness against uncertainties and disturbances. This improved performance can be attributed to the nonlinear nature of the sliding surfaces employed in TSMC algorithms, which allows for more aggressive control actions and quicker stabilization. However, one issues with these methods is the singularity problem, which can lead to infinite or undefined control signals. To address this, researchers have suggested various techniques. For instance, a finite-time controller based on nonsingular TSMC (NTSMC) has been used for control of position and attitude in the quadrotor system (Hou et al., 2020). In Nguyen et al. (2022), the NTSMC with integral-type sliding surface was designed for finite-time tracking control in the quadrotor system, aiming to reduce the chattering phenomenon and avoid singularities. Additionally, a finite-time observer was developed in Nguyen et al. (2022) to estimate the external disturbance. FTSMC outperforms both TSMC and NTSMC by offering faster convergence near the equilibrium point, while effectively avoiding singularities and maintaining robust performance against uncertainties. Its enhanced control precision, quicker response times, and reduced chattering make it a preferred choice for high-performance nonlinear systems. However, the robustness of these controllers relies on knowledge of the upper bounds of disturbances and uncertainties, which are often difficult to determine in practice.
Adaptive control is a widely used approach for quadrotor due to its ability to adapt to dynamic changes and enhance robustness (Basri, 2018; Chen et al., 2022; Eliker and Zhang, 2020; Ghadiri et al., 2021; Labbadi and Cherkaoui, 2021; Nekoukar and Dehkordi, 2021; Nojavanzadeh and Badamchizadeh, 2016; Vahdanipour and Khodabandeh, 2019; Wang et al., 2023). Adaptive control laws can update controller parameters to minimize tracking errors as system variables change over time (Yang et al., 2026a). This allows control signals to be automatically adjusted to address uncertainties and disturbances effectively (Yang et al., 2026b). Researchers have extensively investigated robust adaptive control to improve robustness and maintain stability with unknown external perturbations. For example, adaptive backstepping SMC has been proposed to stabilize and achieve position tracking for a quadrotor with external perturbations (Basri, 2018). In Ghadiri et al. (2021), an adaptive super-twisting NTSMC was considered for a quadrotor system, and resulting in reduced chattering effect and effective finite-time tracking of attitude and altitude without requiring knowledge of the upper bounds of external disturbances. Mao et al. (2026) proposes an adaptive robust backstepping control scheme for quadrotor UAVs, utilizing an integral sliding mode surface to improve performance under disturbances and payload variations. Additionally, an adaptive SMC for attitude control of a quadrotor, designed to handle unknown upper bounds of lumped disturbances, was presented in Pan et al. (2023).
The shift from integer-order to fractional-order sliding mode control in quadrotors stems from the real limitations of conventional methods. While IOSMC works well in many cases, it struggles when faced with the complex dynamics, noise, and uncertainties that quadrotors naturally exhibit. By introducing Riemann-Liouville fractional operators into the sliding surface, FOSMC brings a new level of flexibility. The value of the derivative or integral no longer depends solely on the present moment; it also takes into account the entire history of the signal to filter out sudden disturbances more effectively, resulting in smoother and more stable control with reduced chattering (Guo and Ma, 2019; Labbadi and Cherkaoui, 2021; Labbadi et al., 2021). Furthermore, because FOSMC captures a wider range of frequency information, the controller becomes more adaptive. It can better handle parameter changes, unknown dynamics, and nonlinear behaviors. In practice, this means more robust and reliable performance not only in quadrotors but also in robots, electric motors, and UAVs.
In Labbadi and Cherkaoui (2021), an adaptive finite-time controller based on fractional-order nonsingular fast TSMC was developed for quadrotor trajectory tracking. Similarly, a fractional-order backstepping approach, incorporating SMC, has been proposed for trajectory tracking in the presence of wind turbulence (Vahdanipour and Khodabandeh, 2023). In addition, an adaptive control method for estimating the moment of inertia matrix has been designed, which enhanced robustness and the tracking performance under disturbances and uncertainties.
When the airflow from a quadrotor’s propellers is obstructed by a surface such as the ground or a platform, aerodynamic forces increase, causing the so-called “ground effect” (Li et al., 2024). This phenomenon, encountered during tasks like landing, object grasping with a robotic arm, or mode transitions, introduces variable lift forces that challenge flight stability and control (Zhang et al., 2024). Therefore, developing robust control strategies to compensate for these ground-effect-induced disturbances (Li et al., 2026) is essential for safe and accurate execution of landing or attitude-tracking missions.
Recently Lian et al. (2022) proposed a fast nonsingular terminal sliding mode control with angular velocity planning (FNTSM-AVP) for quadrotor attitude control, where an arctangent-based sliding surface effectively eliminates chattering while preserving convergence speed. Shao et al. (2016) introduced an approach for trajectory tracking of underactuated quadrotors, offering an alternative perspective on constraint satisfaction. Compared to existing method such as Labbadi and Cherkaoui (2021) and Labbadi et al. (2021), our proposed AFOTISMC offers three distinct advantages: (i) the combination of fractional-order operators with integral terminal sliding surfaces provides additional tuning flexibility and enhances the controller’s steady-state accuracy, robustness, and transient performance while reducing chattering and compensating for slow system drift or disturbances, (ii) the adaptive laws eliminate the need for prior knowledge of disturbance bounds, and (iii) the explicit consideration of ground effect extends applicability to landing scenarios (Zhang et al., 2024).
The contributions of the proposed approach are as follows: • Design a novel AFOTISMC for position and attitude tracking in a quadrotor system with bounded uncertain disturbances, ensuring that the reference trajectories are accurately followed and the control signals remain relatively smooth. • Achieve zero tracking errors in finite-time using the proposed AFOTISMC. • Comparison to the IOSMC, the proposed controller offers improved performance, including faster convergence, elimination of singularity, reduced chattering effect, more flexible control parameter assignment, and lower control effort. • Implement an adaptation law to estimate the gains in the switching term of the control signal, simplifying controller design and enhancing system performance when dealing with uncertain disturbances.
The organization of the current study is as follows: Section 2 presents the flight dynamics equations for a six-degree-of-freedom (DOF) quadrotor system, including the problem formulation and the effects of uncertain bounded disturbances. Section 3 outlines the controller design process in two phases: initially without disturbances and uncertainties, and subsequently incorporating them. This section details the structure of the proposed AFOISMC and demonstrates its finite-time convergence for trajectory tracking in the presence of disturbances. Section 4 provides numerical results to validate the efficacy of the proposed method compared to existing approaches. The paper concludes with Section 5.
2. Modeling of quadrotor system
This section introduces the quadrotor dynamic model with parameter uncertainties and external disturbances.
2.1. Quadrotor dynamic model
This section illustrates the model of a quadrotor with four rotors, as shown in Figure 1. The quadrotor configuration involves two reference frames: the body frame and earth frame, also shown in Figure 1. The schematic of a four motors quadrotor.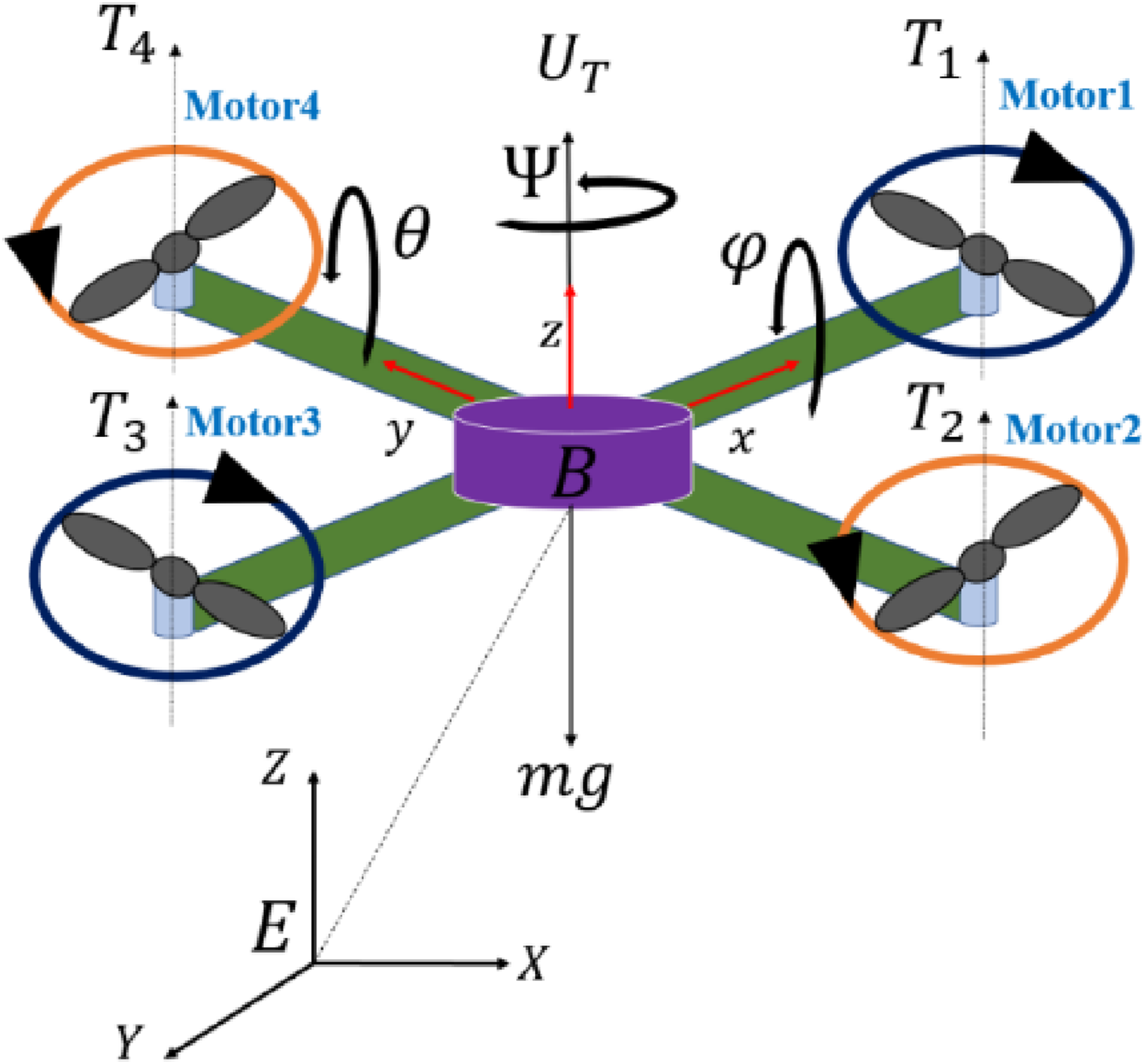
The general motion of the quadrotor in 6-DOF can be described by the following vectors:

Here,
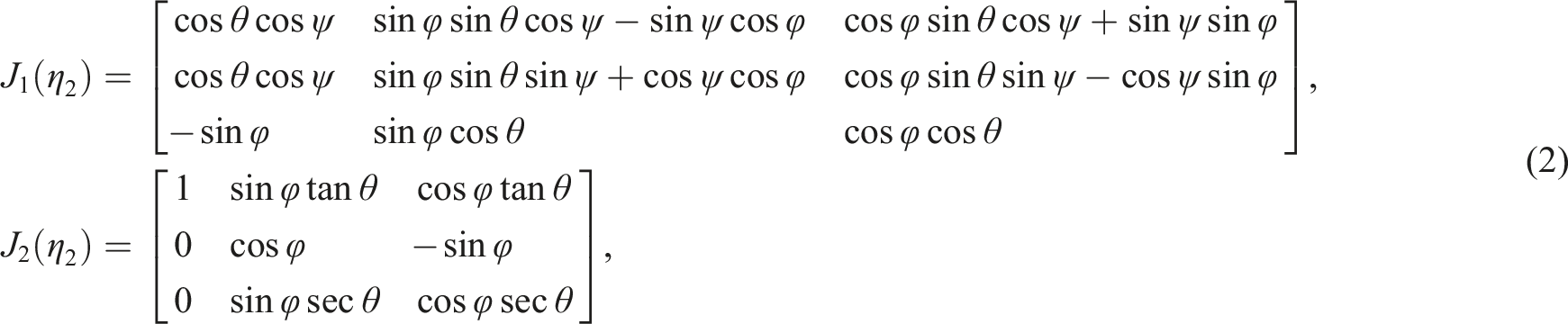
Using the following transformation, the relationship between position and orientation vectors is obtained:

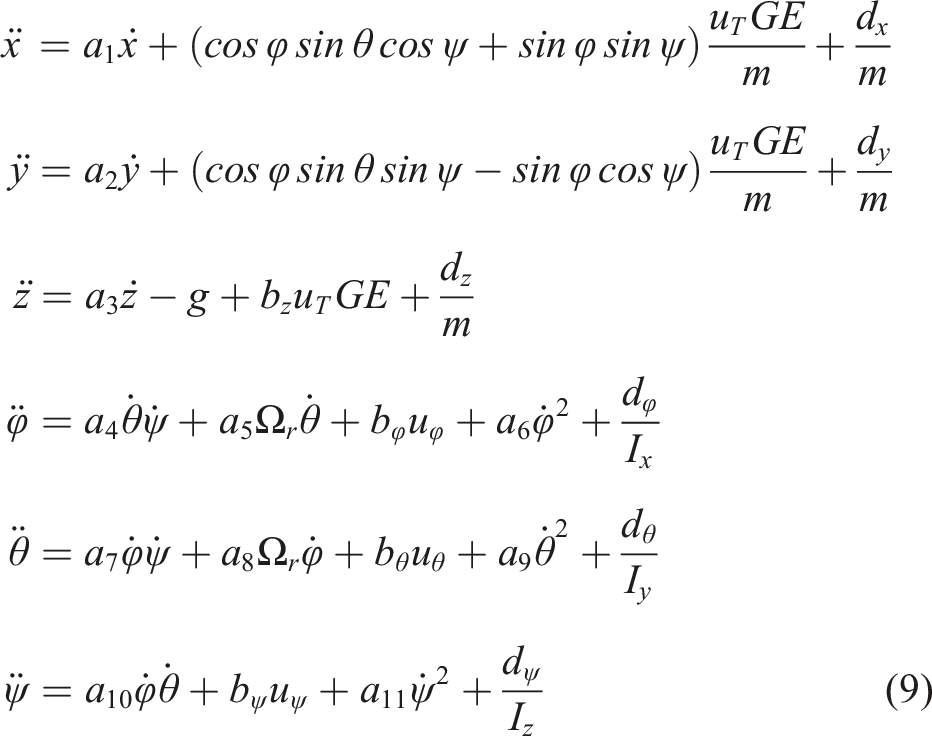
The Newton-Euler method formulates the dynamic model of the quadrotor as follows (Labbadi et al., 2021):

Here,



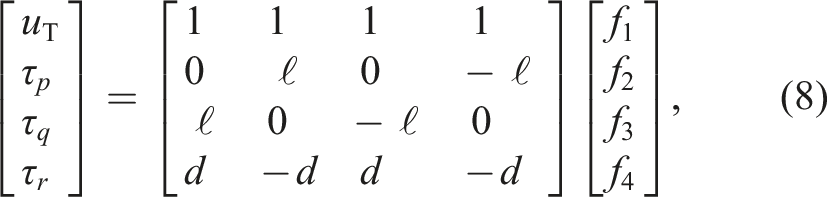
It should be noted that there are only four control signals (



As a result of solving equations (10)–(12) for a given yaw angle



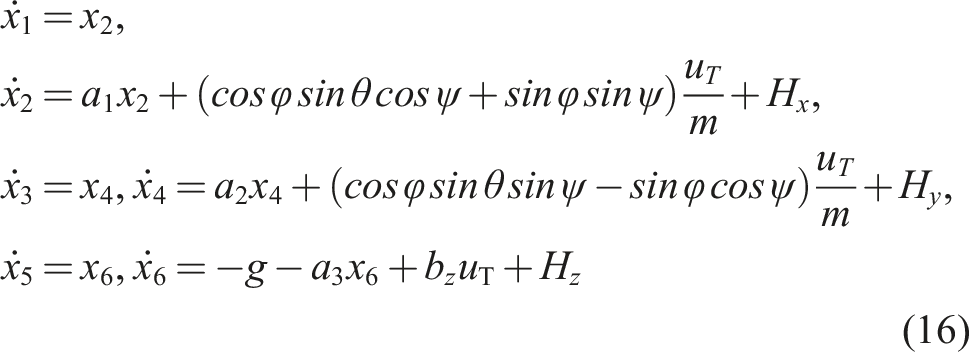
2.2. Quadrotor state-space model
Considering the state vector
Similarly, the state-space model of attitude dynamics with perturbations is considered as:
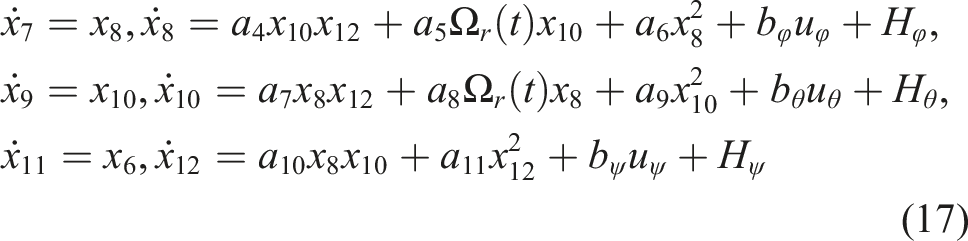
The notation
The Euler angles satisfy
The lumped disturbance

Consider a dynamic system for which the positive Lyapunov function

Assuming that

3. Proposed controller design
The primary objective of this study is to achieve quadrotor tracking by developing an adaptive fractional-order terminal integral sliding mode control (AFOTISMC) technique capable of handling unknown uncertainties and disturbances. To achieve this, the study first designs a finite-time tracking control method based on AFOTISMC, assuming known upper bounds of perturbations. Subsequently, an AFOTISMC technique is presented to address scenarios where the upper bounds of disturbances and model uncertainties are unknown.
The proposed AFOTISMC follows a cascade architecture (Figure 2). The outer loop (position) generates virtual controls The overall control architecture of the quadrotor.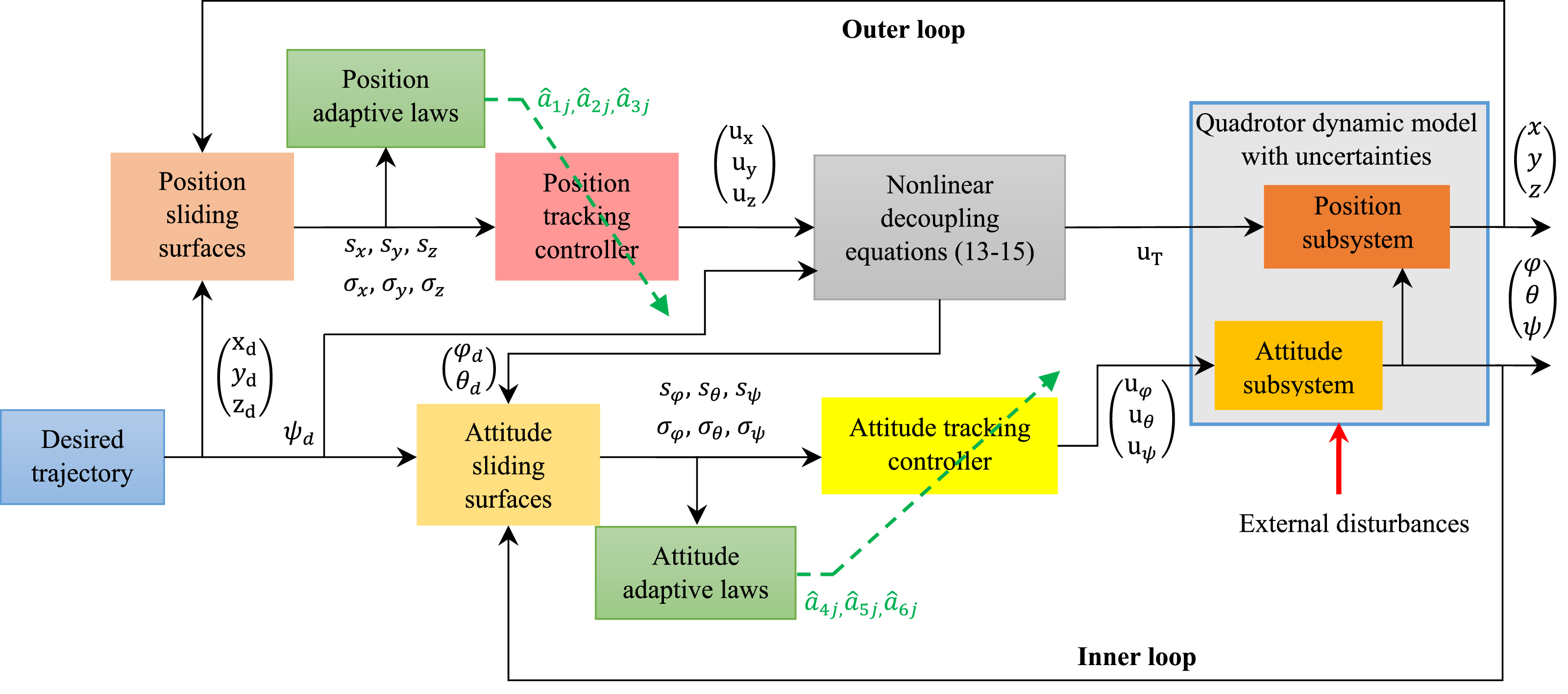
3.1. Design controller for a quadrotor without parameter uncertainties and disturbances
The objective of this section is to design the sliding mode controllers that keep the state variables on the sliding manifolds. The terminal sliding manifolds with integral term are defined as follows:

The sliding surface
Now, the suggested fractional-order terminal surfaces are given by:

The time derivative of

The equivalent parts of the control laws are defined as:



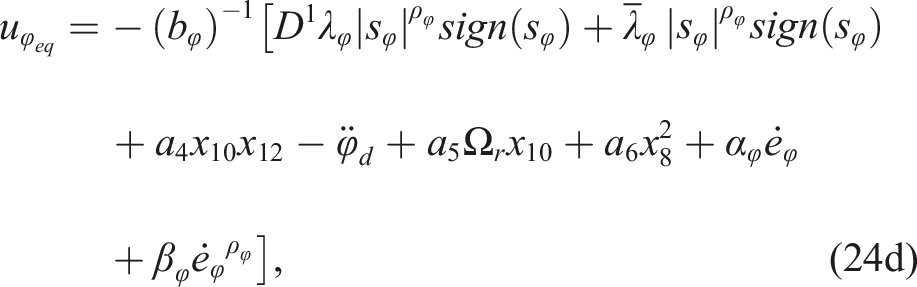
To enhance tracking control, switching control laws are added to the equivalent control laws as follows:






Consider the quadrotor system (16) and (17) with

The following Lyapunov function candidate is considered: The time derivative of


The Riemann–Liouville fractional calculus framework (Kilbas et al., 2006; Labbadi and Cherkaoui, 2021; Labbadi et al., 2021), which is also adopted in MATLAB/Simulink implementations such as the FOMCON toolbox, provides a key inverse relation between the fractional integral and derivative operators. Specifically, for

This property is frequently used in the analysis and proof of fractional-order dynamic systems, where it enables the simplification of expressions involving successive fractional integration and differentiation. This characteristic will be instrumental in the subsequent analysis.
After performing the substitution of terms from equations (22), (23), (25a)–(25f) into equation (28), and leveraging the standard fractional calculus property
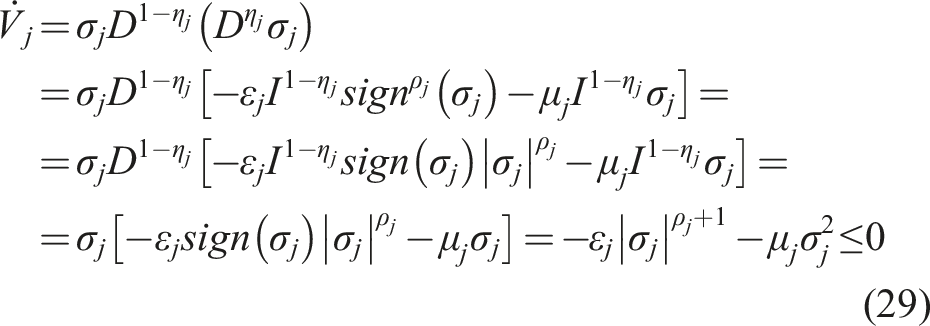
Using equation (29), one has

From the inequality (30), it can be obtained
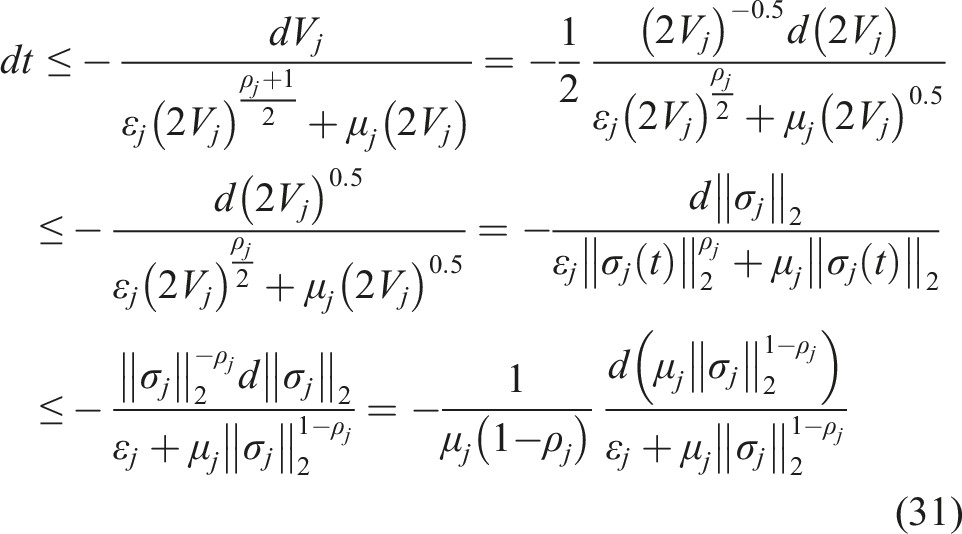
By integrating equation (31) from


Thus, the reaching time to the sliding manifold will be

Hence, the closed-loop system satisfies finite-time stability criteria under Assumptions 1–2. This completes the proof. • Design procedure overview
The design proceeds in three logical steps: - - -
3.2. Design controller for a perturbed quadrotor
In the preceding subsection, a controller was designed for the quadrotor assuming no uncertainties or disturbances. In this section, we extend the FOTISMC approach to address a quadrotor system affected by external disturbances and parameter uncertainties. Therefore, we follow the same design process outlined in Section 3.1.
Consequently, the control laws in equation (25a)–(25f) are modified to account for model uncertainties and disturbances as follows:






Consider the quadrotor system (16) and (17) with unknown but bounded disturbances satisfying Assumption 2. Under the control laws (34a)–(34f) with the ideal sign function, the closed-loop system is stable and all state variables converge to the sliding surfaces
The following Lyapunov function candidate is considered:

The time derivative of

Substituting the control laws (34a)–(34f) into the expression for

Applying the fractional composition property (verified in the proof of Theorem 1) and noting that

Since

From (39), we can write:

Inequality (40) satisfies the finite-time stability condition in Lemma 1. Therefore,
Hence, the closed-loop system satisfies the finite-time stability criteria under Assumptions 1-2. This completes the proof.
3.3. Adaptive law derivation
In this section, the adaptive FOTISMC approach is proposed for estimating the unknown upper bounds of perturbations affecting the quadrotor system. Accordingly, the adaptive switching control laws for the system can be written as:






Then, the adaptive FOTISMC for the attitude and altitude can be derived as follows:
The adaptive laws of the altitude and attitude quadrotor control can be formulated as:






(Shao et al., 2019). For the uncertain dynamic system described by (16) and (17), and the adaptive laws defined by (44)- (49), it can be concluded that there exists
Consider the quadrotor system described by (16) and (17) under uncertainties and external disturbances. Using the adaptive FOTISMC approach in equations (43a)–(43f) and the adaptive laws defined in equations (44)–(49), then the tracking errors
First, consider the estimation errors of adaptive gains and their time derivatives as follows:

Then, the following Lyapunov function candidates can be considered:

The time derivatives of (51) can be written as

Using the time derivative of
As stated in Lemma 2, we have
To simplify the expression, let us introduce the following variables:
From (18), (56) and
From (57), we conclude that
For any

In conclusion, the total convergence time required for the tracking error to reach zero can be expressed as

From this analysis, the stability of the overall system has been established.
Due to the use of
4. Simulation results
In this section, the proposed controller is evaluated for a quadrotor subjected to unknown perturbations. Both inner (attitude) and outer (position) loops are implemented to achieve cascaded control architecture. In the inner loop, the desired attitude is controlled and used in model equation with thrust for position tracking in outer loop. This approach ensures faster and more accurate control. The controller’s performance was assessed through comprehensive numerical simulations, with the AFOTISMC method verified via MATLAB simulink. To demonstrate performance of the proposed control scheme, in terms of robustness and tracking accuracy, two distinct scenarios were examined. The performance of AFOTISMC was compared with IO-SMC and the FOGSMC, as introduced in Labbadi et al. (2021), under condition of parametric uncertainties and external disturbances. The same conditions and proper tuning were applied to all controllers for a fair comparison.
In the simulations, realistic paths with roughness and abrupt changes in direction were assumed. In this way, the speed and sensitivity of the controllers were evaluated in response to the instantaneous references changes. To minimize tracking error, the control effort momentarily adjusts at these instances due to the presence of the second derivative of the desired position and attitude values in the control laws. To ensure a fair comparison between controllers, identical saturation levels were applied to the quadrotor control signals. This saturation is a common feature in practical applications and is explicitly considered in this study.
A quantitative evaluation of the proposed AFOTISMC, SMC, and FOGSMC (Labbadi et al., 2021) methods was conducted using the Integral Absolute Error (IAE) performance metric:

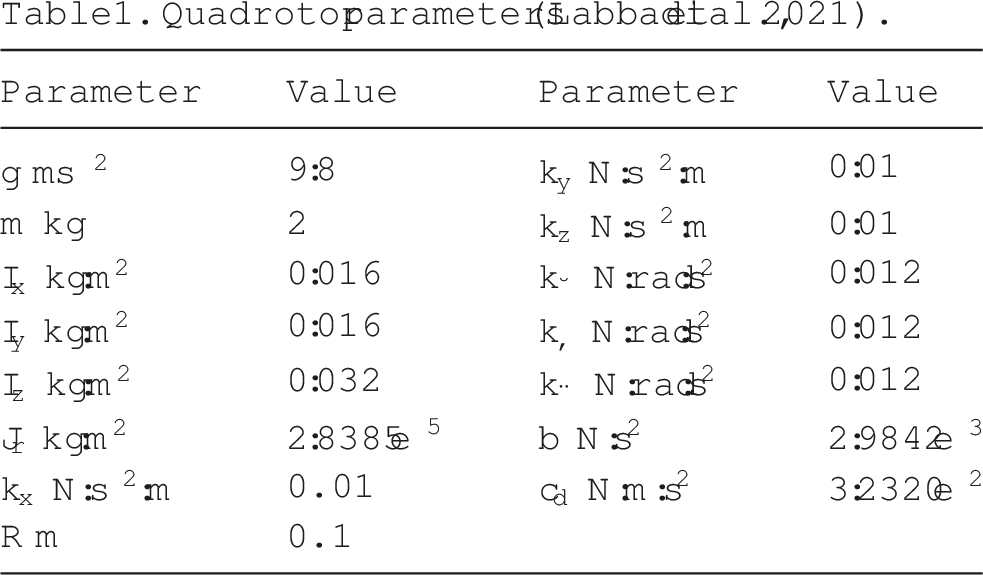
Quadrotor parameters (Labbadi et al., 2021).
Control system parameters.
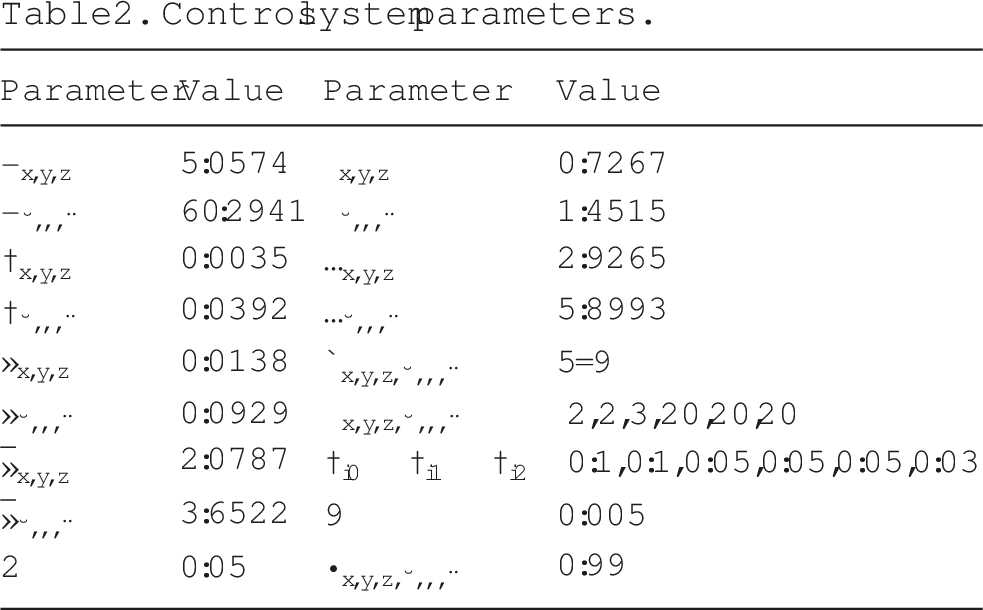
Controller parameters were fine-tuned via the MATLAB Genetic Algorithm Toolbox to minimize the Integral of Absolute Error (IAE) for quadrotor tracking. Simulations were conducted in Simulink using a fixed-step ode1 (Euler) solver with a 1 ms sampling time. To reduce computational load, common gains were assigned to the three position and three attitude channels, yielding 12 independent parameters instead of 36. The GA was configured with a population size of 50 and a maximum of 25 generations. While tuning all 36 gains individually could further improve performance, the adopted strategy provides a computationally efficient and conservatively optimal solution.
The Fractional-order Modeling and Control (FOMCON) toolbox is employed for the fractional-order dynamic approximation in Simulink. The fractional-order terms in the proposed AFOTISMC are calculated by a 2nd-order Oustaloup modified filter, applied within a frequency range of 0.02 to 50 rad/s.
4.1. Scenario 1
In this scenario, uncertainty in the quadrotor model is introduced by varying the drag coefficients of the position states and the yaw angle. The variation in the drag coefficients 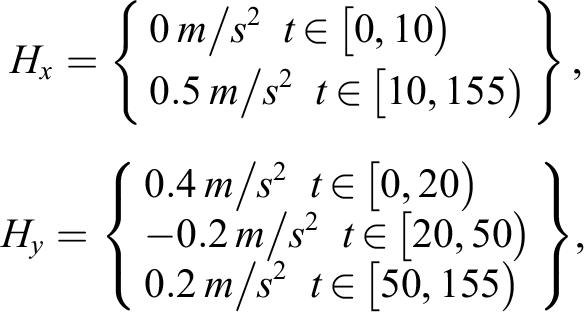
The duration of the simulation is set to 155 seconds. The reference trajectory, or desired path, with initial condition 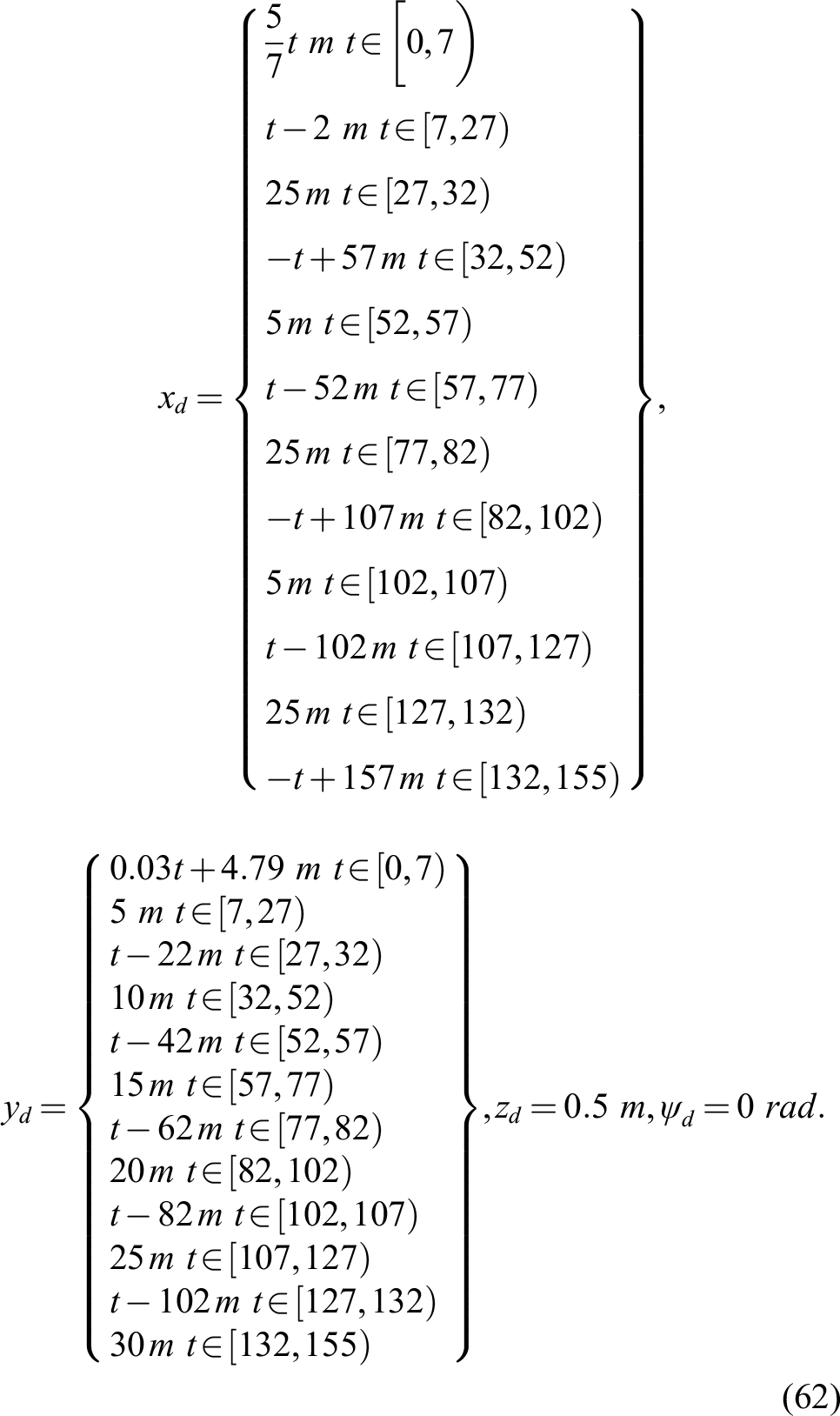
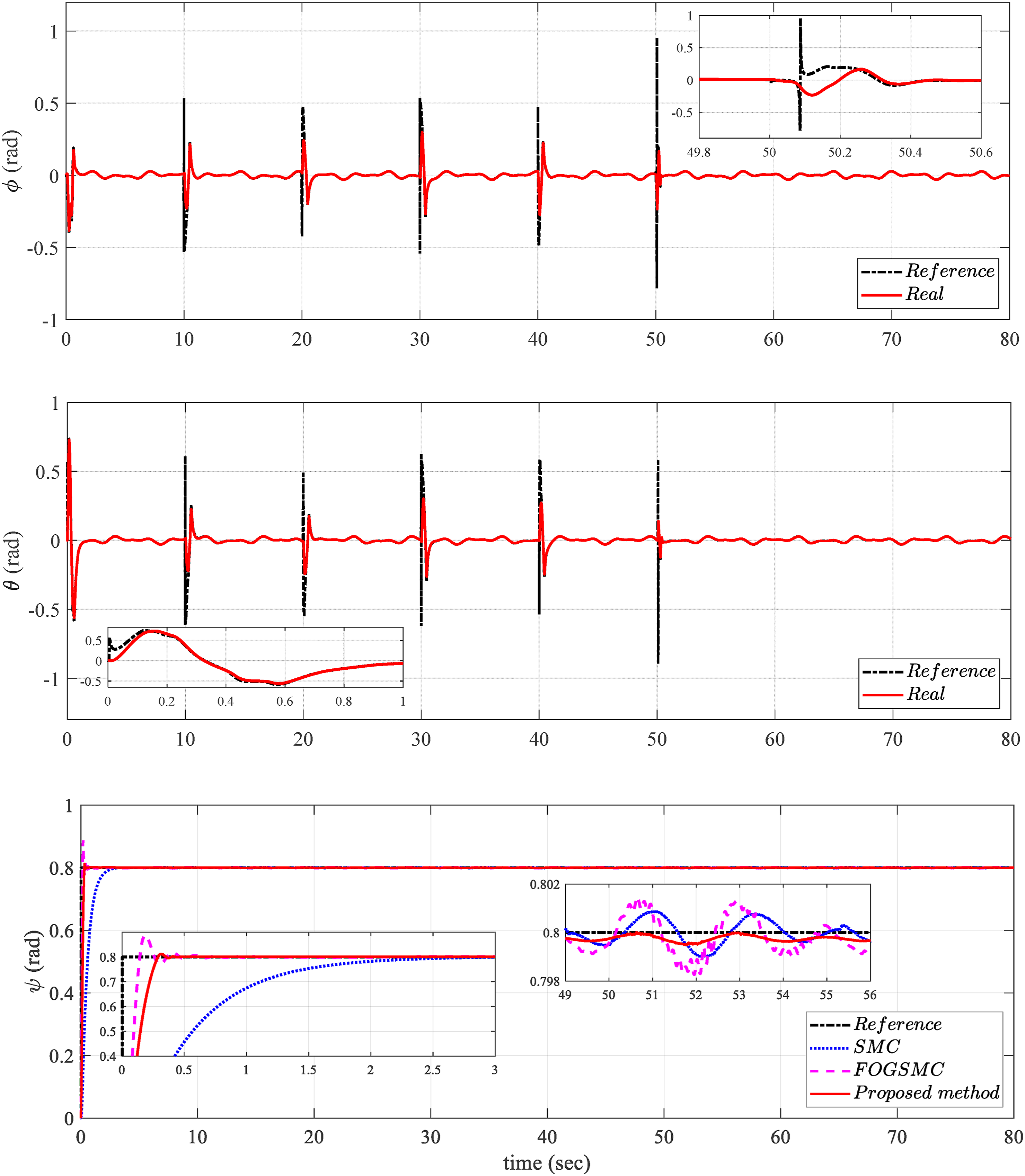
The detailed simulation results are illustrated in the Figures 3 and 4, which display the state variables ( Time evolution of position states in the scenario 1. Time evolution of attitude states in the scenario 1.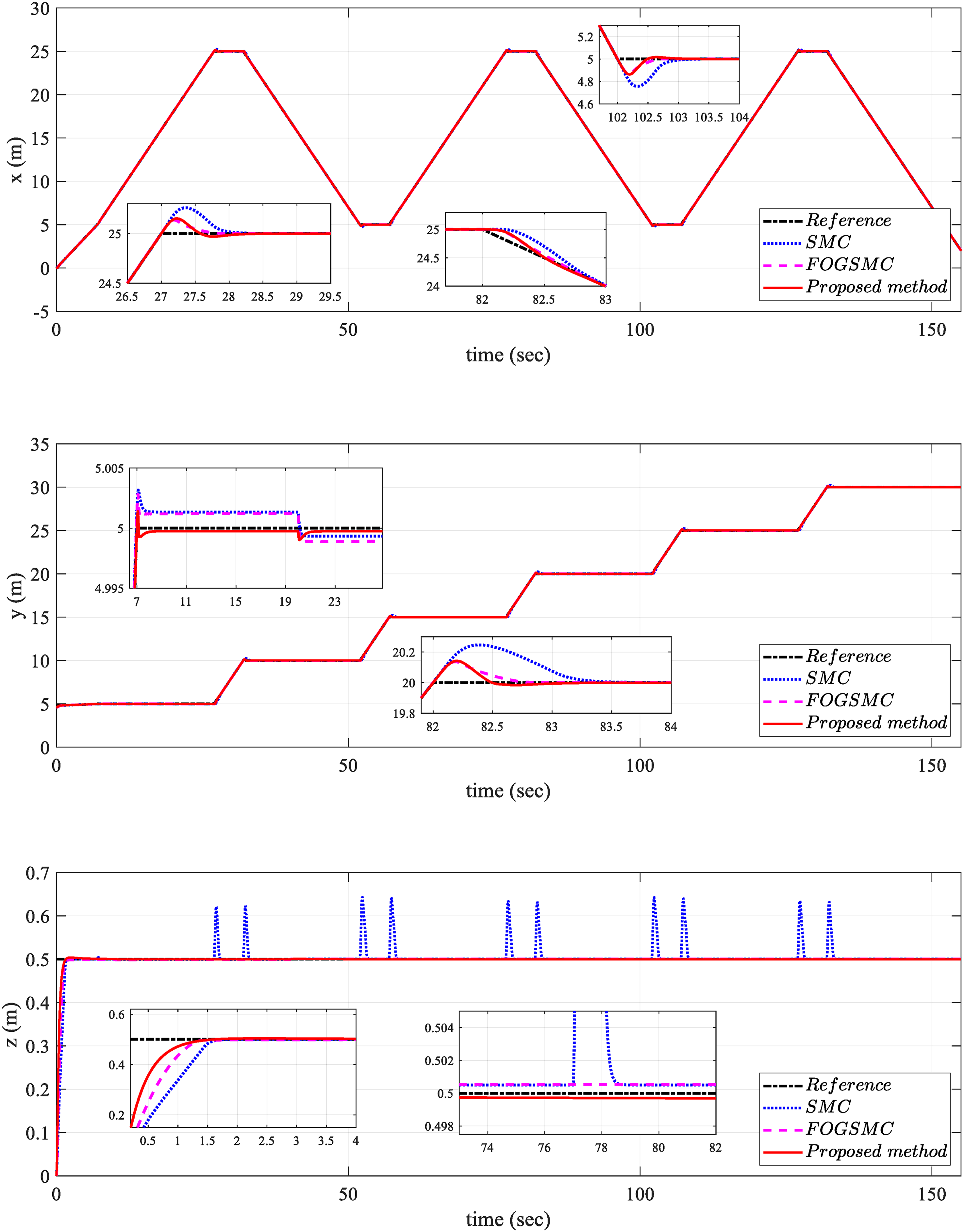
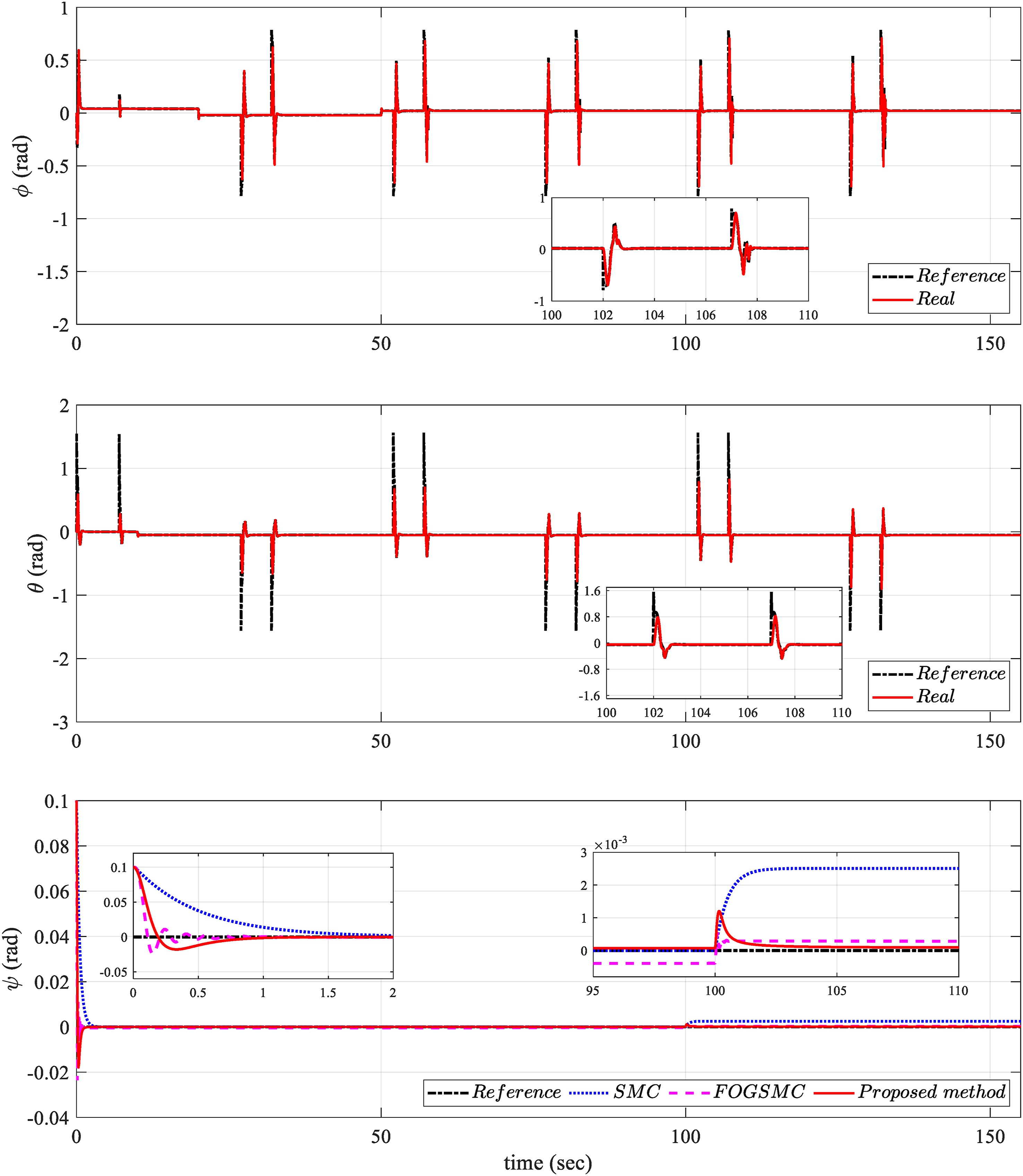
The signals
In the 2D and 3D trajectory tracking results for Scenario 1.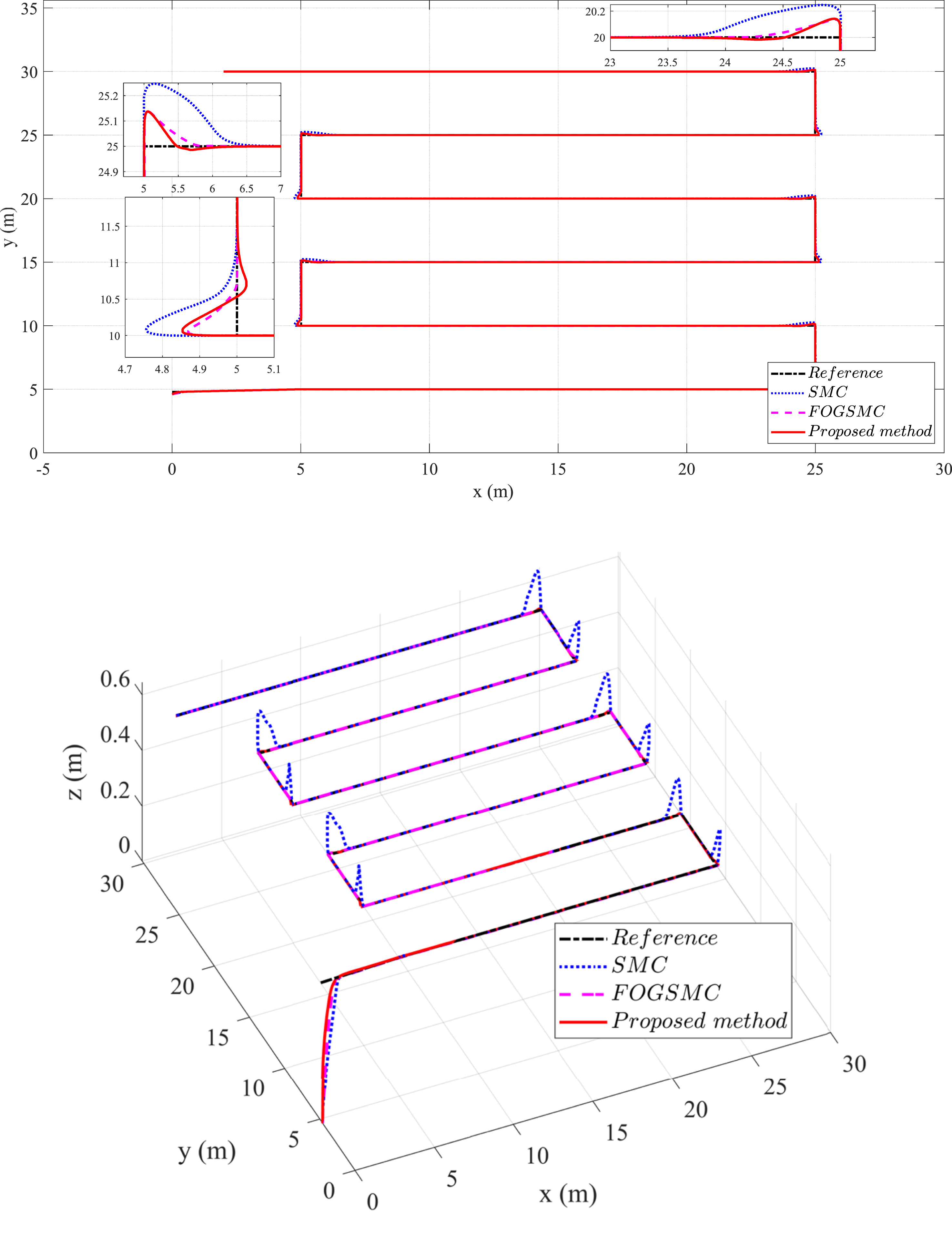
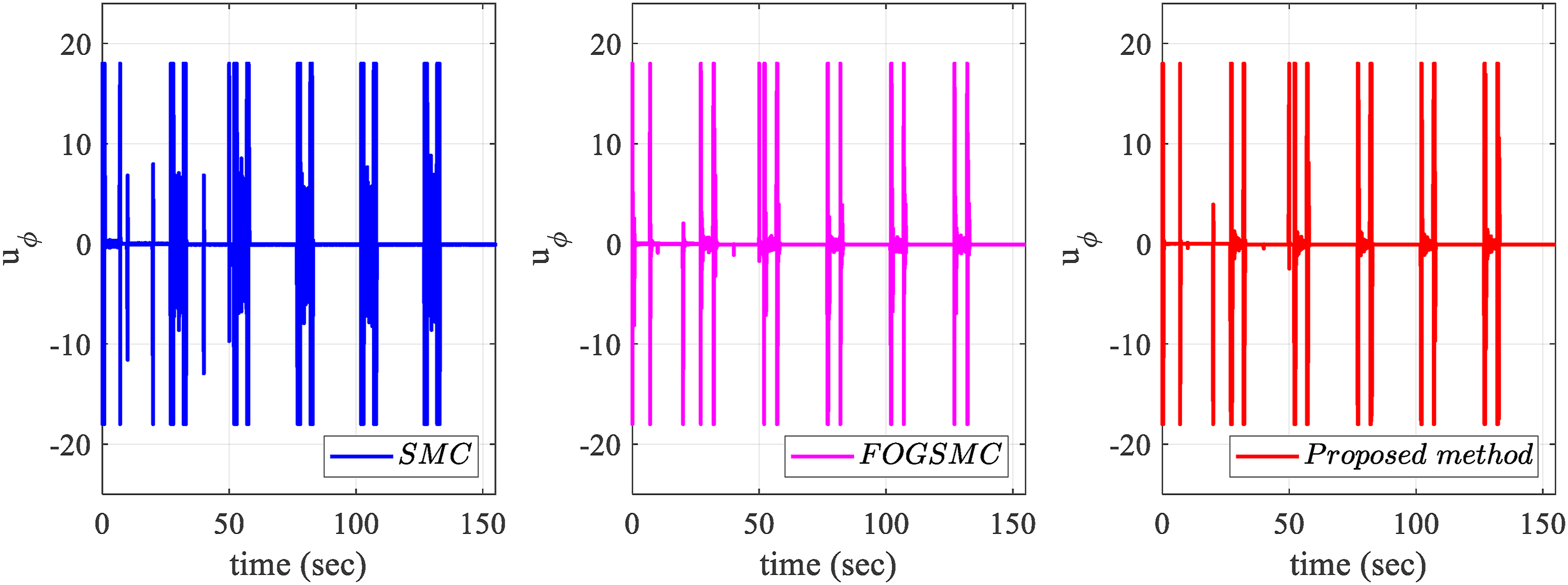
The control signals Thrust control signal Roll control signal Pitch control signal Yaw control signal 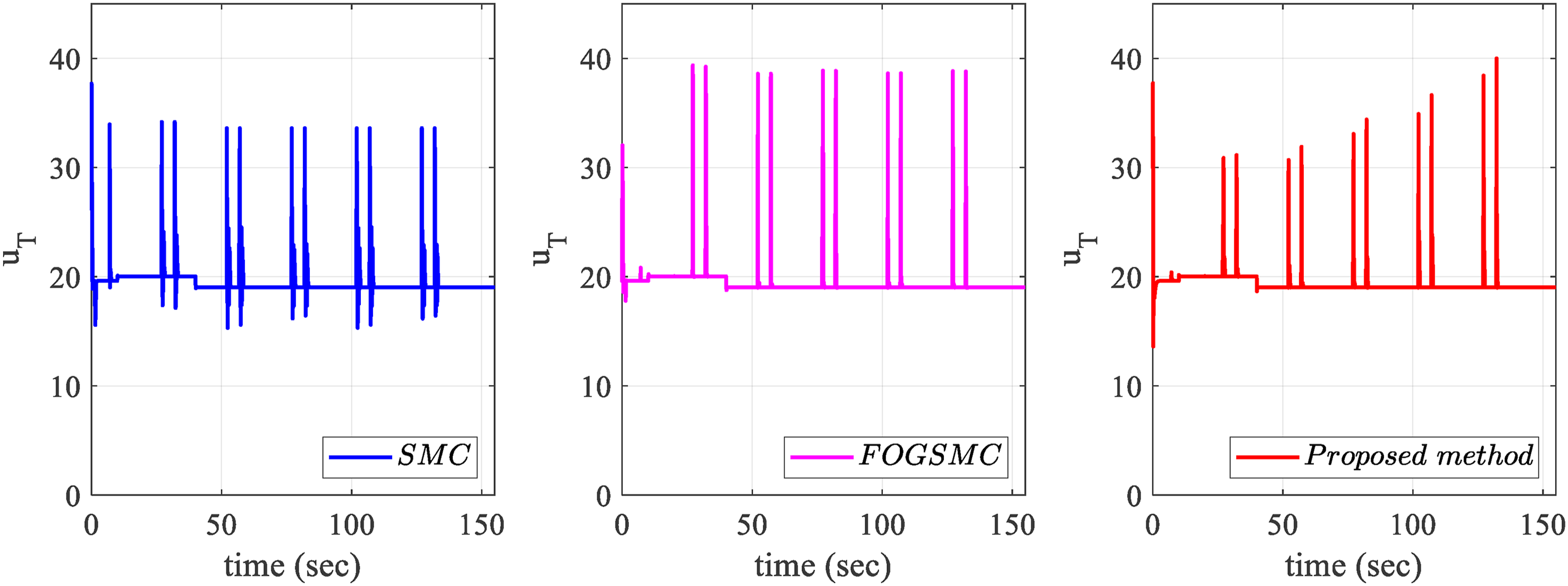
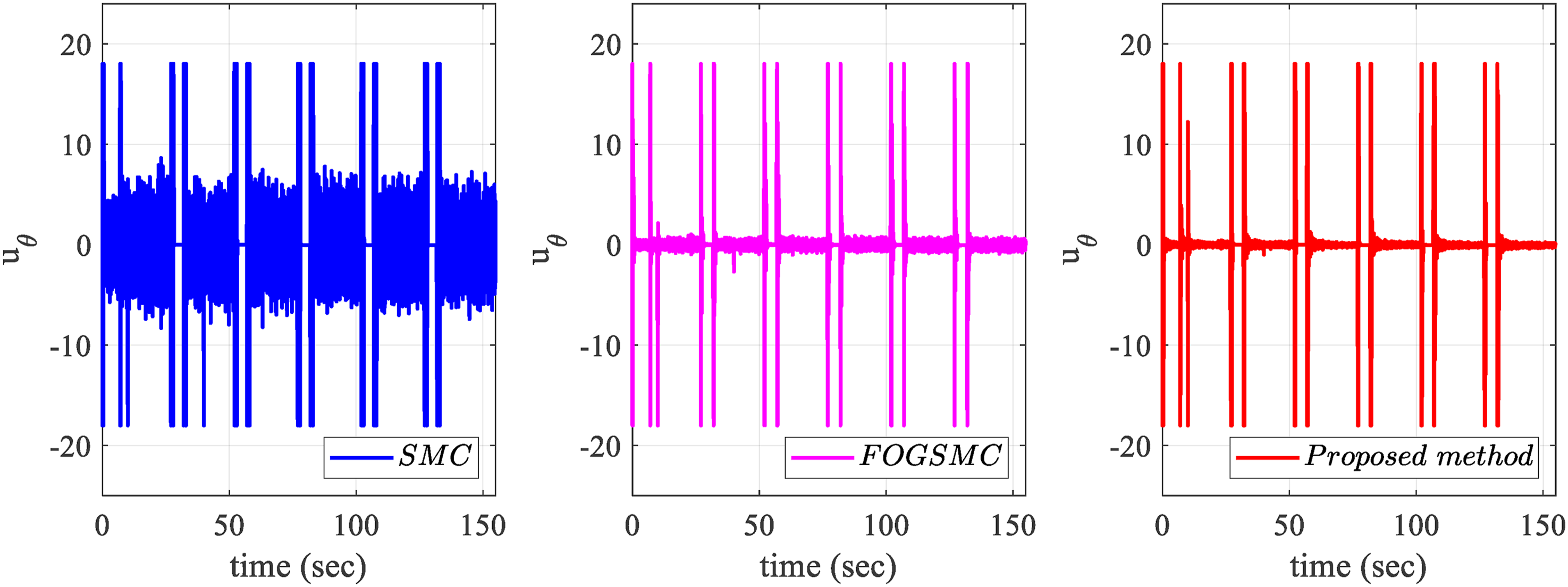
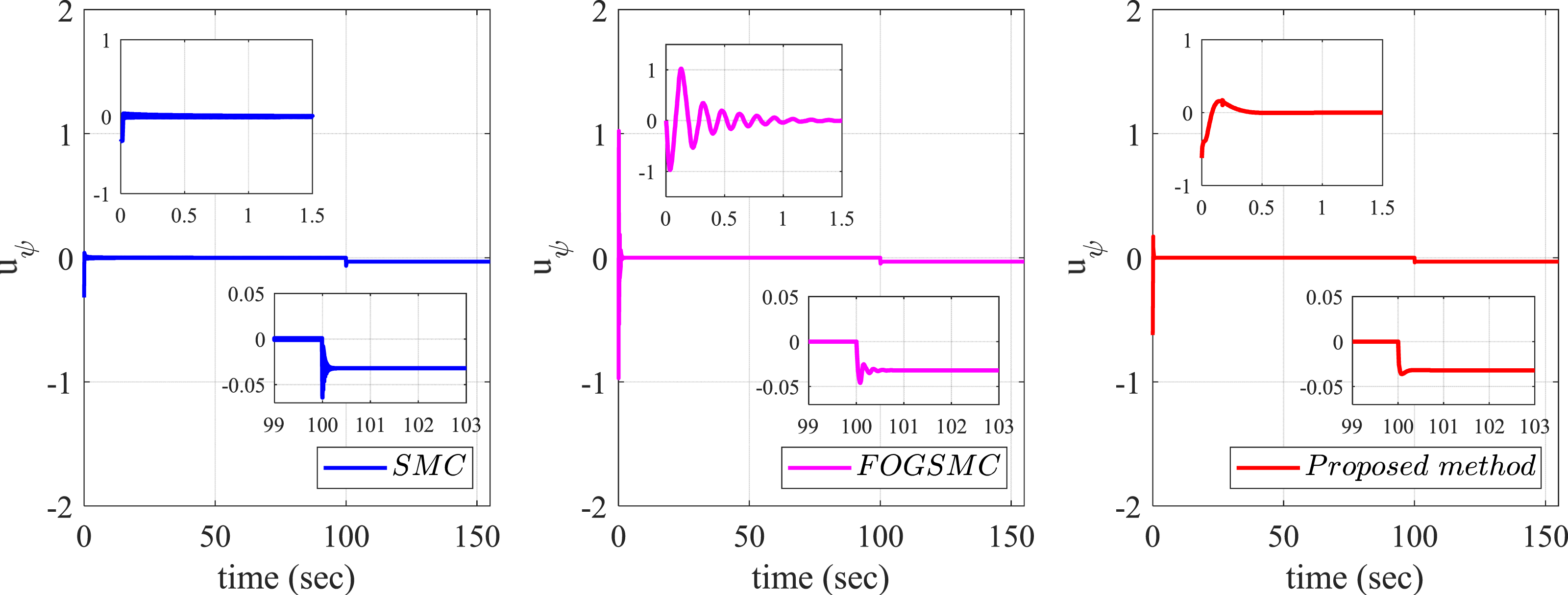
The estimated unknown parameters of the controller, based on the proposed adaptive law in equations (44)–(49), converge to constant values as shown in Figure 10. The trust signal amplitude for tracking sharp turns in the flight path is high across all approach, due to sudden changes in position commands. In the proposed method, the trust signal has increased over time as needed, benefiting from its adaptability compared to other methods. This reduces the energy consumed by the controller. Adaption parameters in the scenario 1.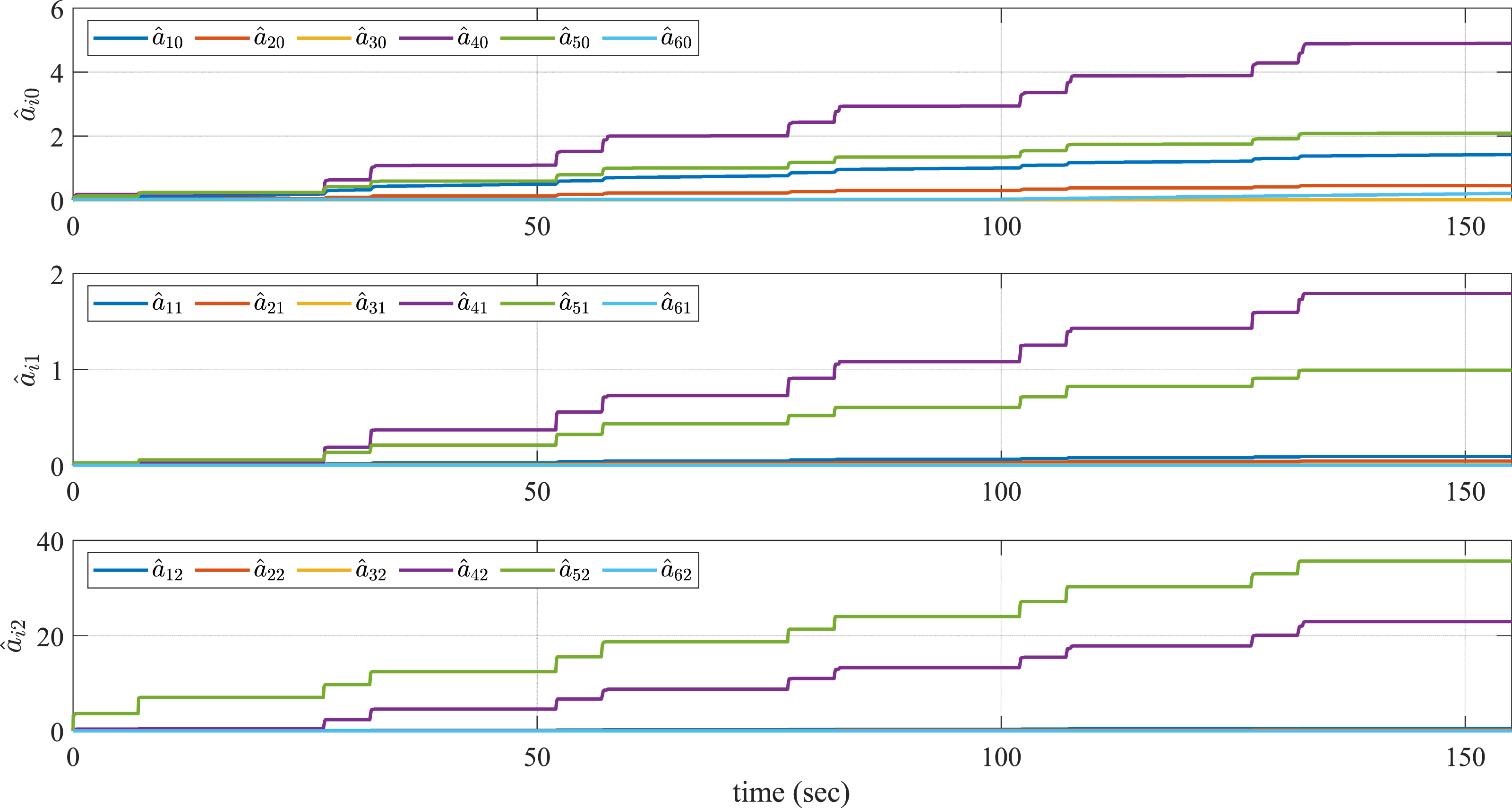
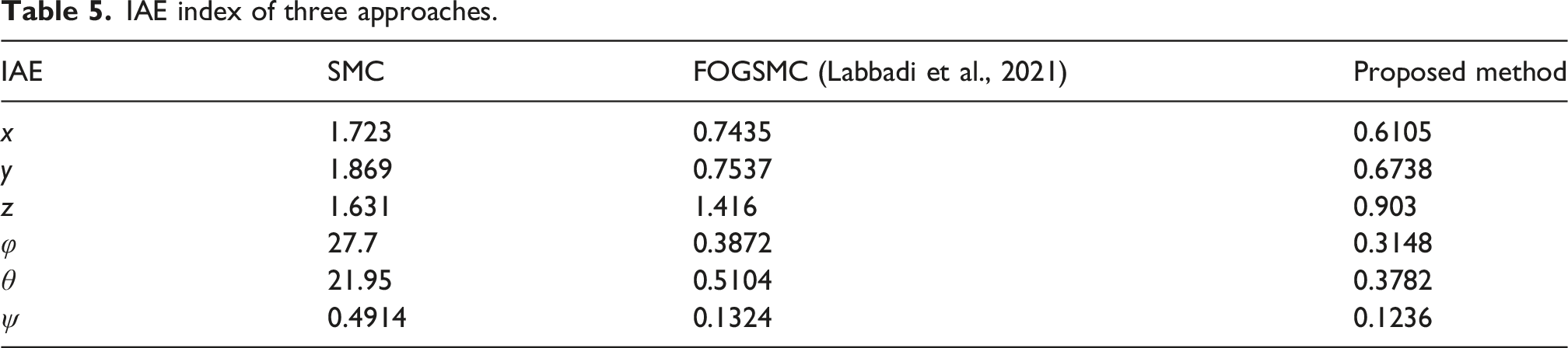
IAE index for the proposed method.
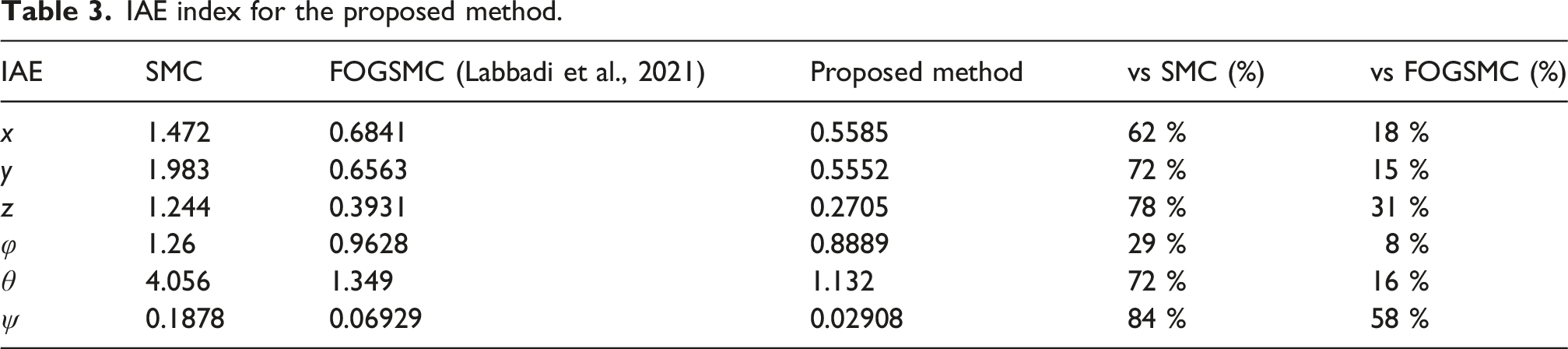
Compared to conventional SMC, the proposed AFOTISMC reduces IAE by 62–84% across all states. Compared to the recent FOGSMC, improvements range from 12% to 31% for position states and reach 58% for yaw.
4.2. Scenario 2
In this scenario, to evaluate the performance and robustness of the proposed approach, a 30% random uncertainty is considered beside the nominal parameters of mass and rotational inertia in the quadrotor 

The detailed simulation results are illustrated in the Figures 11 and 12 for the state variables ( Time evolution of position states in the scenario 2. Time evolution of attitude states in the scenario 2.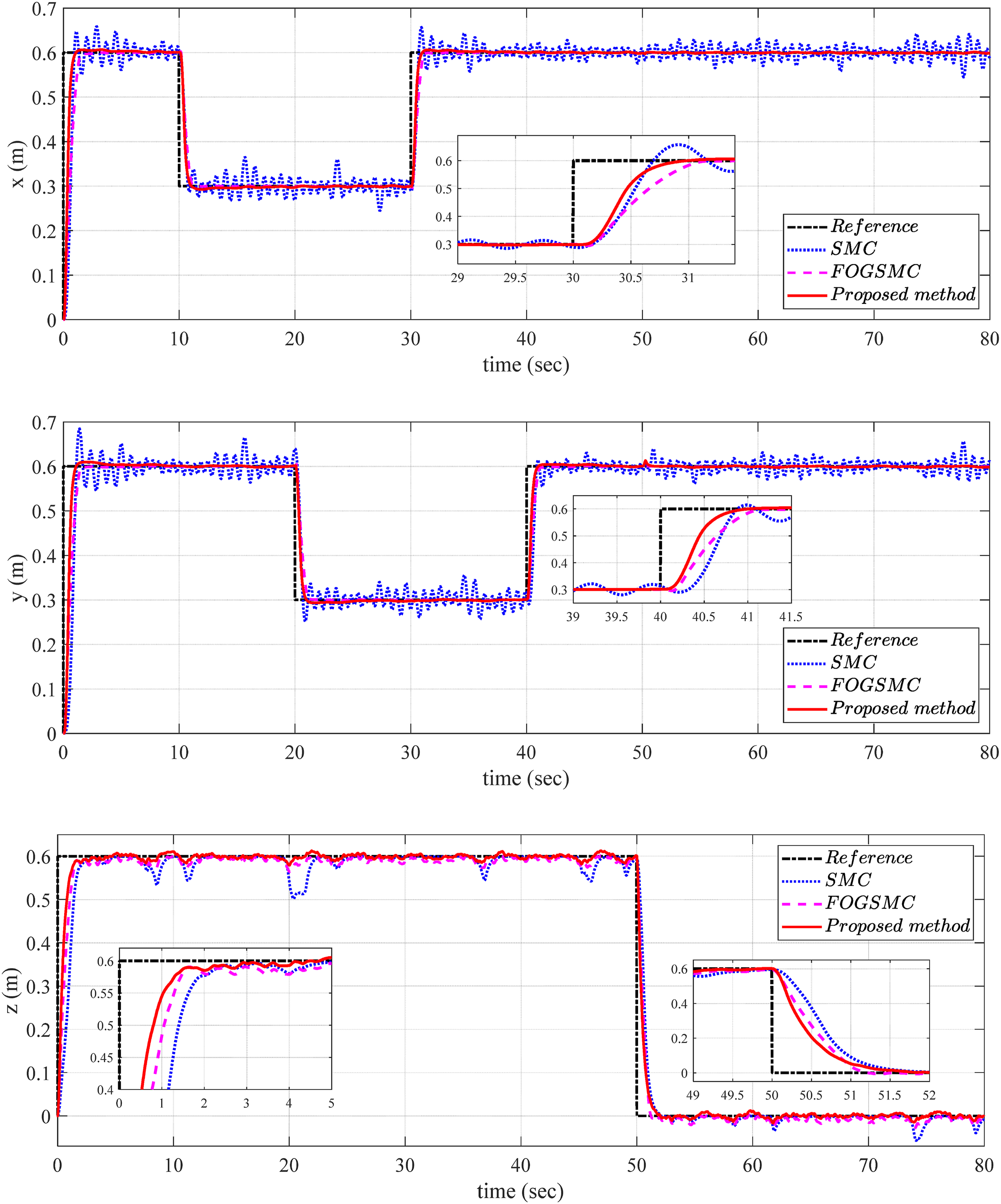
The proposed finite-time adaptive mechanism increases the gain from zero to a limited constant value, as shown in the Figure 13. This gain-increasing process is an automatic response to errors caused by uncertainties and rapid changes in the reference signal. These fast changes are necessary to track the twisted path. The slow rate of gain increase over the duration of the simulation ensures a lower amplitude in the control signal. Consequently, the energy index for the proposed method is smaller than that of the non-adaptive SMC method, as shown in Table 4. Adaption parameters in the scenario 2. ISI of three approaches.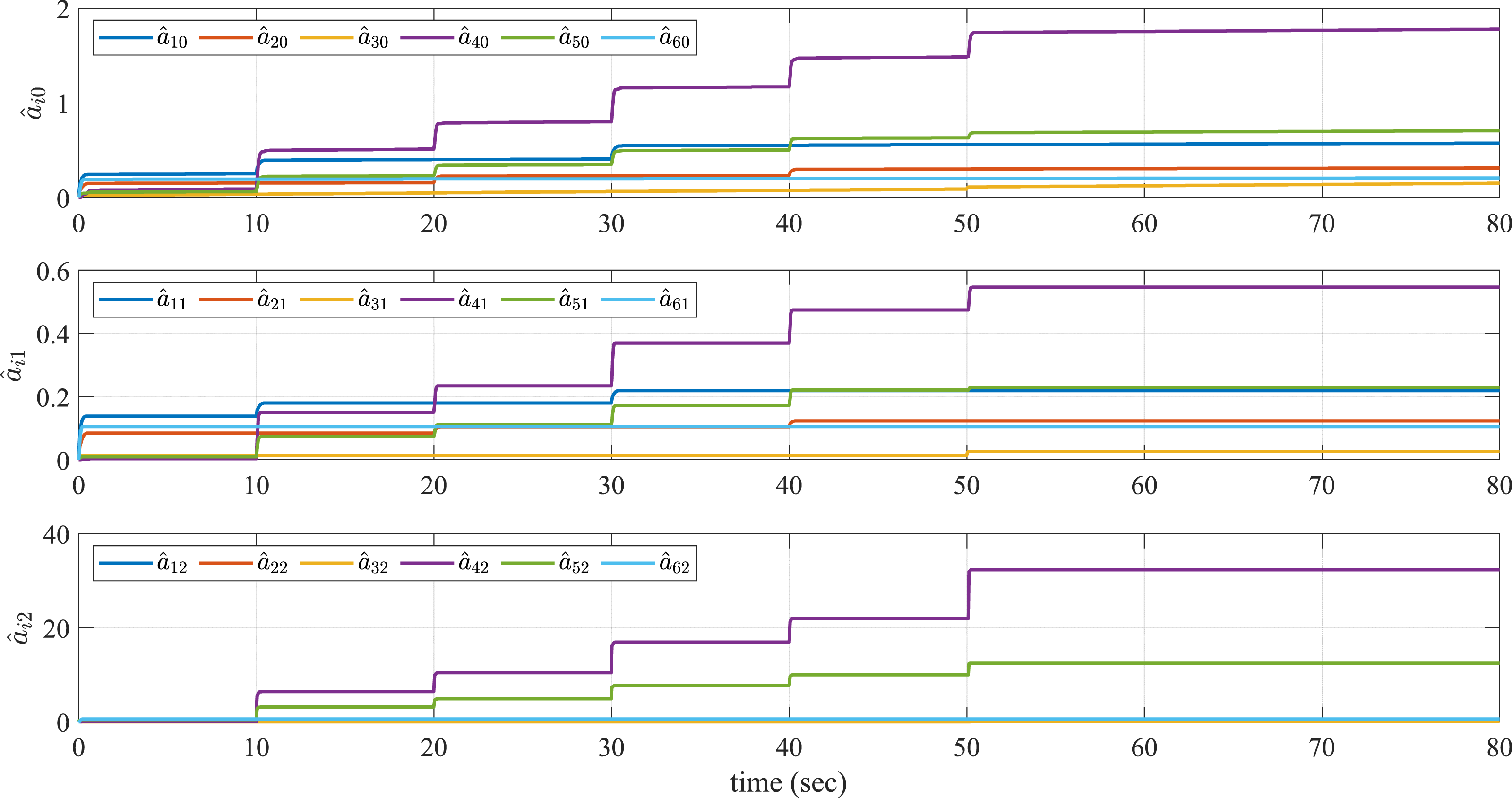

To illustrate the performance of the controllers, the following index is used (Falcón et al., 2019) (see Figure 14):
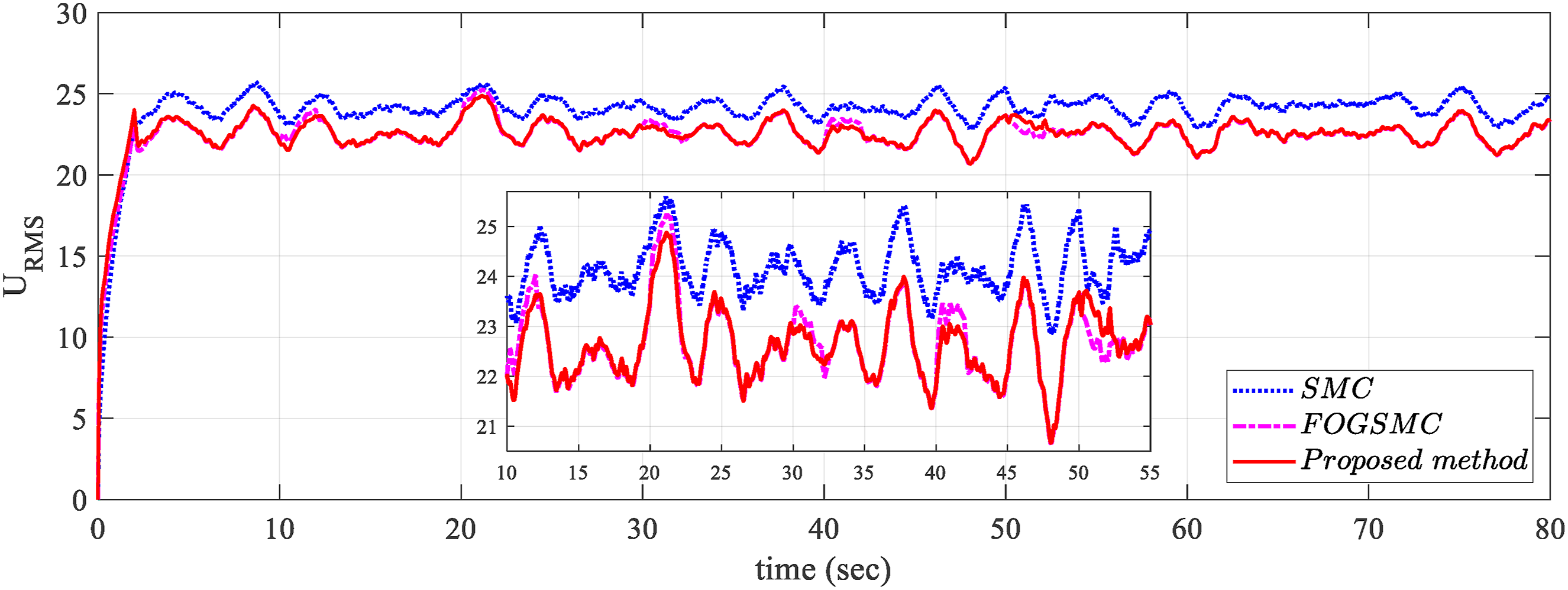
In this scenario, the control energy consumed is also studied and reported in Table 4 based on a quantitative analysis using the integral of squared input (ISI) as follows (Aguila-Camacho and Duarte-Mermoud, 2016):
The proposed method reduces IAE by 62–84% compared to conventional SMC and by 12–31% (up to 58% for yaw) compared to FOGSMC.
Figure 15 shows the position tracking in 2D and 3D plots. These results demonstrate satisfactory tracking performance and robustness compared to the existing methods. Table 5 presents the IAE index for the proposed method, indicating superior tracking performance compared to the other methods. This is attributed to the controller’s adaptive gain for energy management, which enables precise control and effective tracking of all six states, even in the presence of parameter uncertainties in mass and moment of inertia. 2D and 3D trajectory tracking results for Scenario 2. IAE index of three approaches.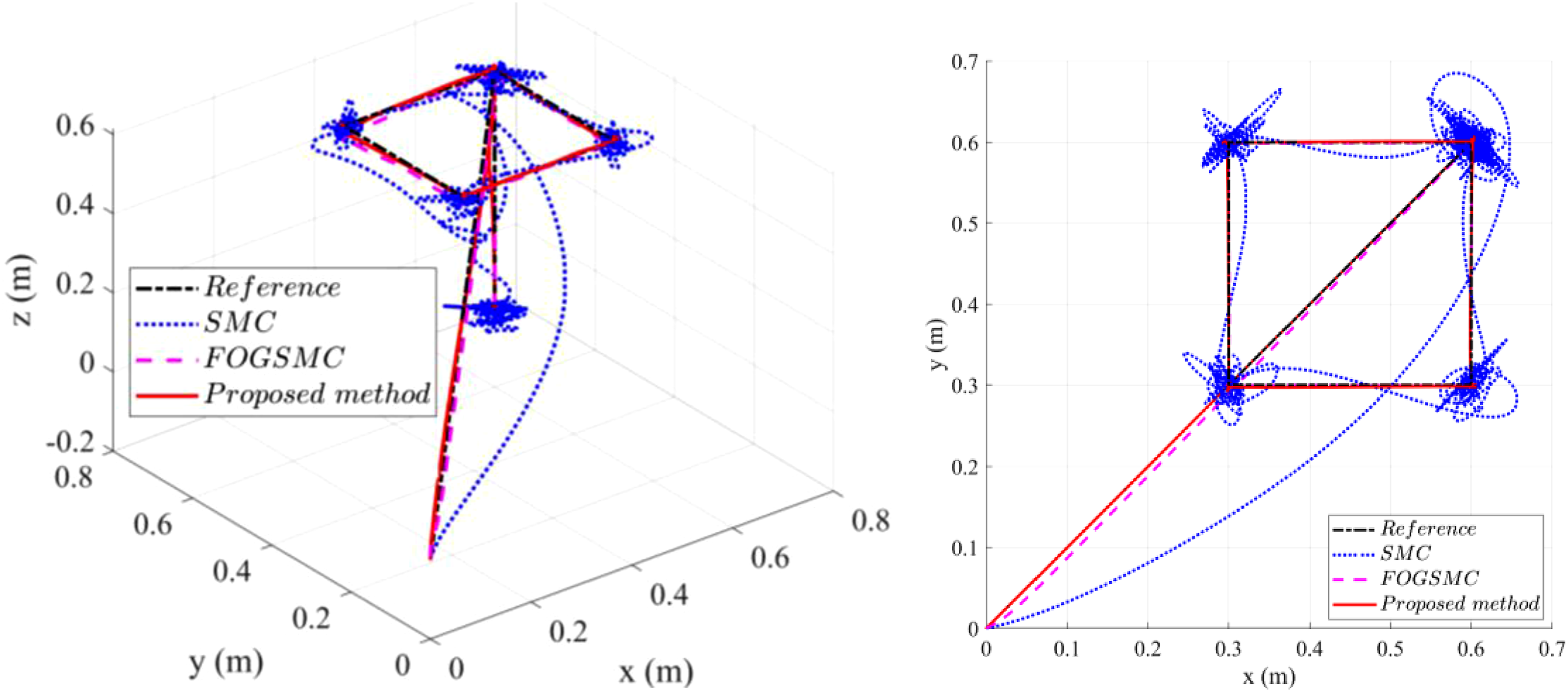
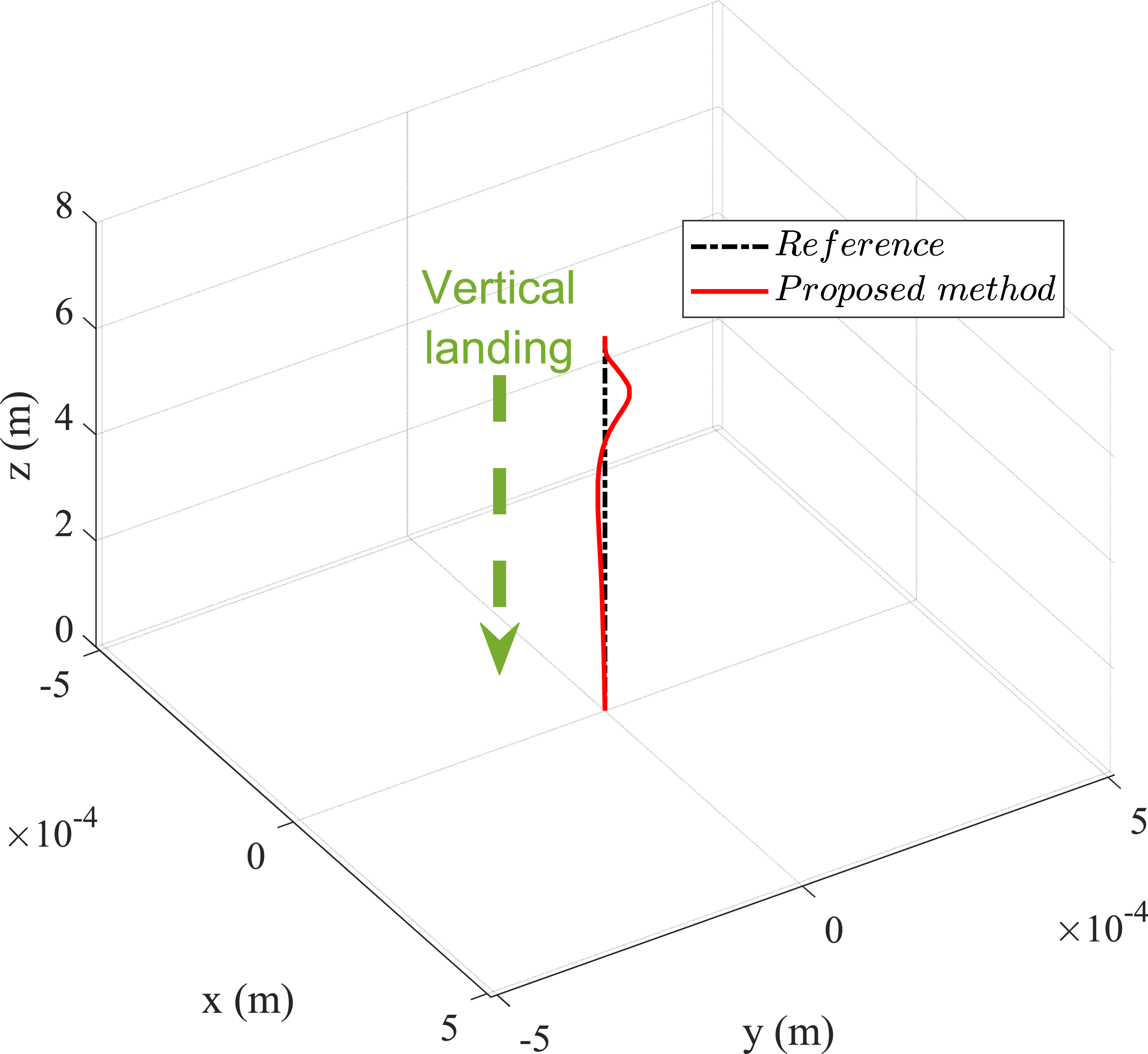
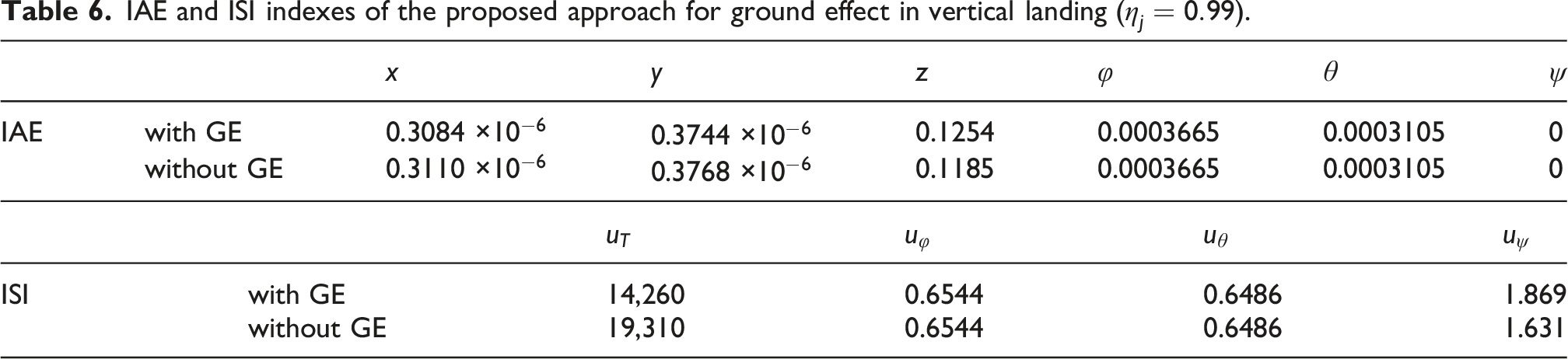
4.3. Scenario 3: Ground effect (GE) modeling for vertical landing
In this section, a specific quadrotor landing scenario is evaluated using the proposed robust adaptive control law under for two cases: with and without ground effect, and Illustration of altitude, thrust’s control signal, ground effects in vertical landing ( 3D tracking results of the proposed approach for ground effect in vertical landing ( IAE and ISI indexes of the proposed approach for ground effect in vertical landing (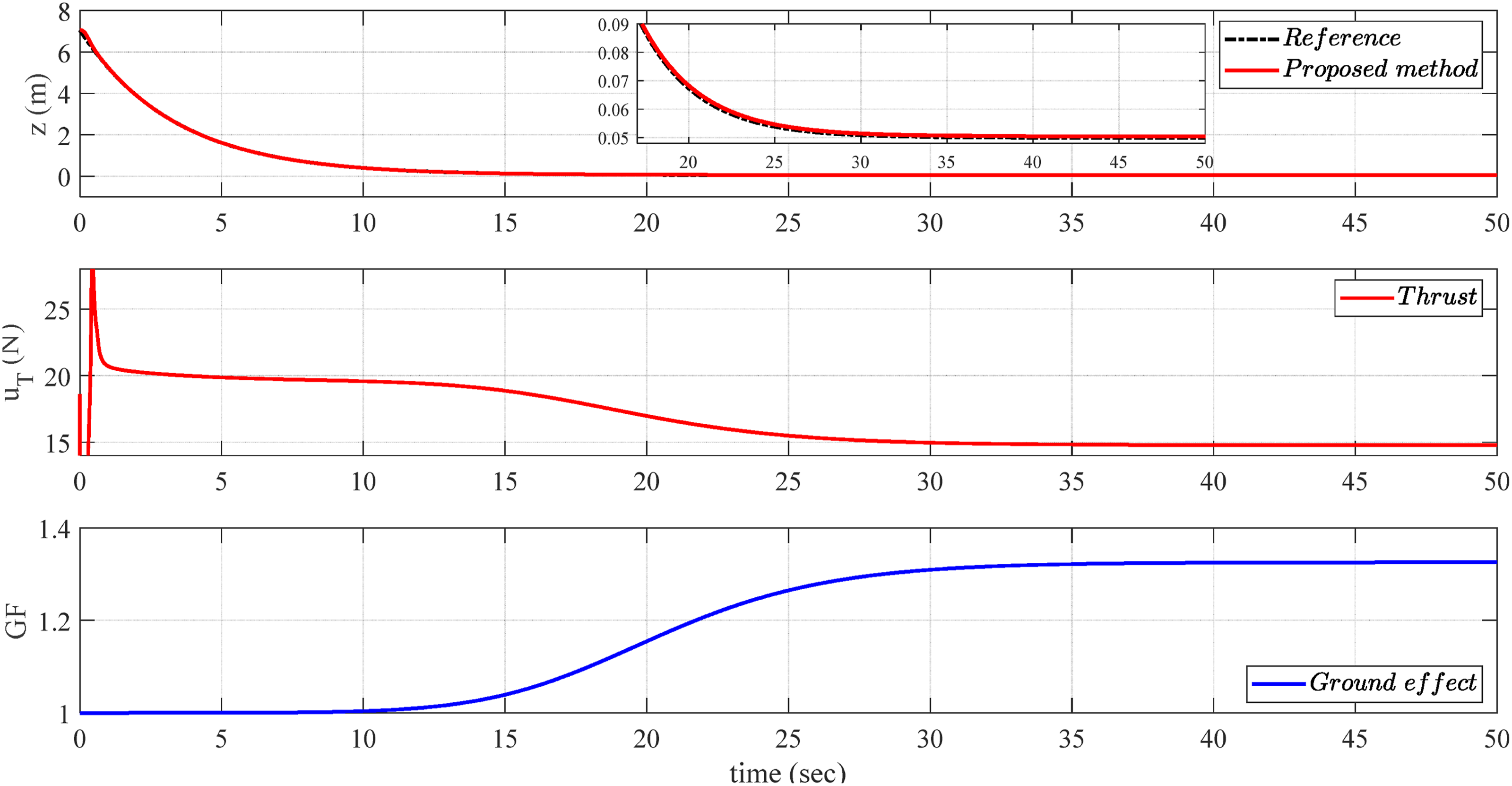
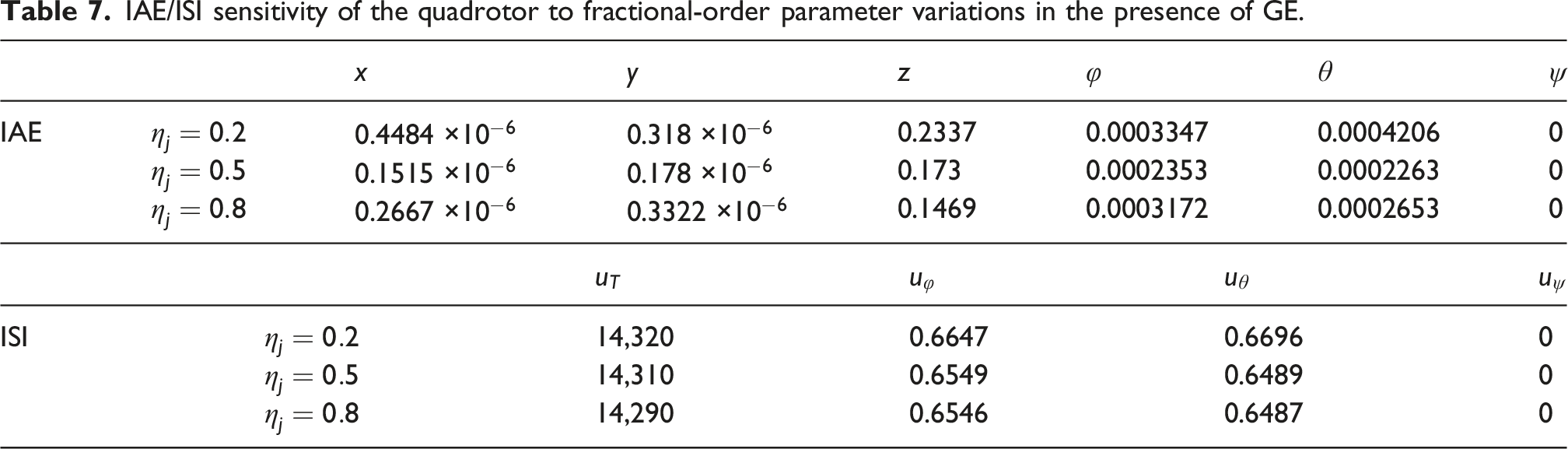
4.4. Fractional-order sensitivity analysis
In this section, the sensitivity of the proposed fractional-order controller is evaluated for the previously discussed ground effect scenario by varying the fractional-order parameter, Quadrotor position sensitivity to fractional-order parameter variations in the presence of GE.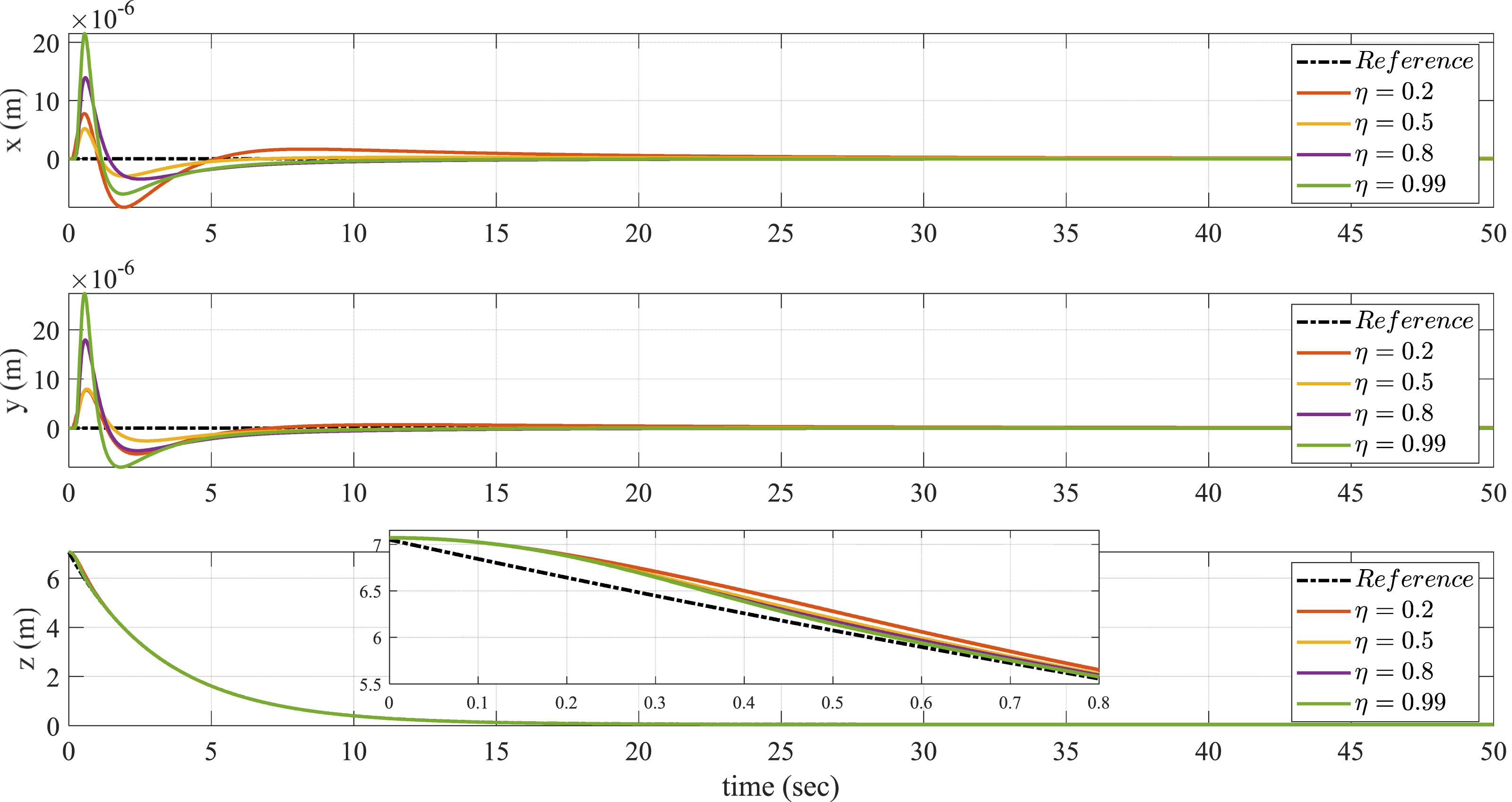
IAE/ISI sensitivity of the quadrotor to fractional-order parameter variations in the presence of GE.
In the nonlinear quadrotor model, the altitude
In contrast, the translational positions
5. Conclusion
This paper proposes an AFOTISMC technique for precise tracking of both the position and attitude subsystems in a quadrotor, even with model uncertainties and external disturbances. The proposed method leverages the combined strengths of SMC and fractional-order theory. By incorporating Riemann-Liouville fractional-order operators, additional degrees of freedom are introduced, allowing for more flexible tuning. This leads to enhanced robustness, reduced chattering, and improved tracking speed compared to conventional IO-SMC approaches. The proposed control strategy effectively compensates for disturbances and uncertainties in the system using an integral term and adaptive laws. Consequently, it achieves smaller oscillations, minimal steady-state error, rapid finite-time convergence, and eliminates chattering or singularity issues. Additionally, the controller’s energy consumption is reduced through the use of adaptive gains. To handle the numerous control parameters, a meta-heuristic optimization algorithm, such as the genetic algorithm, was employed. By minimizing the IAE index as the cost function, the genetic algorithm facilitated efficient tuning of the control parameters. The robustness of the proposed approach is validated through various scenarios, including random variations in drag coefficients, external disturbances, and uncertainty in nominal parameters. As a result, the AFOTISMC method consistently outperformed other control strategies, delivering smaller signal errors, precise control, and accurate tracking of all system states, even amidst parameter uncertainties related to mass and moment of inertia. Moreover, we have evaluated the sensitivity of the proposed controller to variations in the fractional-order parameter and its effect on tracking accuracy and energy consumption in simulations, considering the ground effect on the quadrotor. It was observed that increasing the fractional-order parameter leads to reduced energy consumption and decreased altitude-tracking error, while maintaining the controller’s stability and robustness throughout these tests.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.