
Abstract
This paper addresses the control problem for semi-active suspension systems using aperiodic sampled-data to enhance driving comfort against disturbances. A new two-layer polytopic Linear Parameter Varying (LPV) framework with state delay is used to model the system’s nonlinearity and handle uncertainties between the actual and measured system parameters. By applying a modified Krasovskii functional and Wirtinger’s inequality, a comprehensive stability analysis of the two-layer polytopic LPV system is carried out. An innovative relaxation technique, involving a slack variable matrix, is introduced to facilitate controller design. This approach yields new conditions for polytopic LPV controllers, formulated as Linear Matrix Inequalities (LMIs). For effective disturbance rejection, the H ∞ criteria is applied to the two-layer polytopic LPV model, excluding state delay effects from aperiodic sampling. This leads to the development of polytopic LPV controllers that ensure H ∞ performance. Simultaneously considering the derived design conditions for LPV controller design, the resulting closed-loop dynamic systems remain stable under sampling and meet the predefined H ∞ disturbance attenuation standards. Simulations on a quarter-vehicle model demonstrate that the proposed method, which accounts for sampling period effects in the design, significantly improves ride comfort and handling performance.
1. Introduction
Vehicle suspension systems are crucial for making your ride more comfortable and safe (Shen et al., 2006; Zhao et al., 2010). When dealing with suspension systems, several critical factors come into play, including comfort of the drive, movement of the suspension system, and the levels of still and moving weight. These factors are very important and should be considered in any control strategies. However, these requirements often conflict with each other. Active suspension systems effectively resolve these contradictions and have shown promising results. These results include adaptive control (Na et al., 2019), H ∞ control (Viadero-Monasterio et al., 2022), fault-tolerant control (Pang et al., 2023), and fuzzy control (Li et al., 2018). In the modern automobile industry, semi-active suspension systems offer significant energy savings over active suspension controls (Phu et al., 2017). Semi-active suspensions combine passive stability with active control, offering comfort, and better handling for a smoother driving experience. They use less energy, supporting the industry’s goals of energy conservation and sustainability (Do et al., 2010a, 2012).
Various approaches have been employed to address the control design challenges for semi-active suspension systems (Ben Hassen et al., 2023; Theunissen et al., 2021). One such method is Skyhook control, commonly used in commercial vehicles. In the Skyhook method, the damping coefficient is continuously adjusted or toggled between maximum and minimum values (Wang et al., 2022). Recent developments include algorithms like Acceleration Driven Damping (ADD) (Savaresi et al., 2005) and mixed Skyhook-ADD (SH-ADD) (Savaresi and Spelta, 2007), which use optimal control principles to enhance the Skyhook technique. Many researchers focus on the Skyhook control approach due to its ability to easily meet comfort requirements (Anaya-Martinez et al., 2020; Moaaz and Ghazaly, 2019). However, while these controllers improve passenger comfort, they often ignore road-holding performance. Model-based predictive control was proposed in (Piñón et al., 2021) to improve both passenger comfort and road-holding, but it lacked robustness and practical applicability. A promising solution to simultaneously enhance comfort and road-holding performance is the use of H ∞ control, which has proven effective (Sharma et al., 2021). Reference (Ding et al., 2023) introduces a new controller known as the time-delay-dependent H ∞ /H2 optimal controller. This controller considers the impact of delay in the damper’s response time on low-frequency vibrations (body vibrations) and addresses multiple control objectives for the semi-active suspension system.
While the aforementioned controllers have shown their ability to improve vehicle performance, they often fail to account for the nonlinear characteristics of semi-active dampers, such as bi-viscous and hysteretic behaviors. To overcome this limitation, the control of semi-active suspensions has been integrated into the Linear Parameter-Varying (LPV) framework (Basargan et al., 2022b; Tian et al., 2022). This framework considers the nonlinear characteristics and allows for online reconfiguration by adjusting the scheduling variables (Basargan et al., 2020, 2021a, 2021b, 2022a). In recent years, there has been growing interest in analyzing and synthesizing sampled-data control strategies for Linear Parameter Varying (LPV) systems (Hooshmandi et al., 2018; 2020b).
H ∞ control has demonstrated effective performance in suspension system control. However, these approaches are primarily designed for continuous-time models, focusing on controllers that operate within a continuous-time framework. In practical implementations, such as in ECUs (Electronic Control Units) within networked systems, challenges arise due to issues like data delays, packet loss, and timing irregularities. In these systems, packet transmission intervals are often irregular. In digital implementations, the sampling period has a significant impact on control system performance, and neglecting this can lead to oscillatory and unstable closed-loop responses. This highlights the importance of aperiodic sampled-data control, which has shown promising results, especially in active suspension systems (Gao et al., 2009; Li et al., 2018, 2020; Na et al., 2019). This raises the possibility of directly designing sampled-data controllers with aperiodic sampling for semi-active suspension systems. Recently, Viadero-Monasterio et al. (2025) introduced a nonlinear sampled-data control approach for MR damper–based semi-active suspensions that avoids Lyapunov–Krasovskii functionals, reducing computational complexity. Their results show that aperiodic sampling can be addressed without the conservatism of conventional delay-dependent methods. Nonetheless, the indicated permissible sampling interval (10–20 ms) demonstrates a level of conservatism in comparison to Lyapunov-based methodologies. Furthermore, the strategy fails to explicitly integrate performance criteria and relies on stability conditions to substantiate its claims of enhanced performance, resulting in a comparison with passive strategies that may not be entirely rigorous.
In this paper, based on time-dependent Lyapunov–Krasovskii functionals and Wirtinger’s inequality, which have been widely discussed in linear sampled-data systems (Barreau et al., 2017), we derive new sufficient conditions for sampled-data LPV systems. As major contribution, the discrepancy between the actual parameters of the semi-active suspension system and their sampled measurements is modeled as uncertainty within this double-layer polytopic framework. Additionally, by utilizing the projection lemma, we establish a new form of stabilization condition. This approach incorporates the sampling period as a parameter in the design process, ensuring that the controller performance accounts for the implementation constraints. This methodology aims to enhance control performance by considering both the LPV framework and the discrete nature of control implementation. To the authors’ knowledge, this topic has not been explored in the design of controllers for semi-active suspension systems, particularly in the context of their nonlinear characteristics.
The mathematical notation used in this paper follows standard conventions. The sets N, R
n
, and Rn×m represent the sets of nonnegative integers, real vectors, and real matrices of appropriate dimensions, respectively. S
n
and
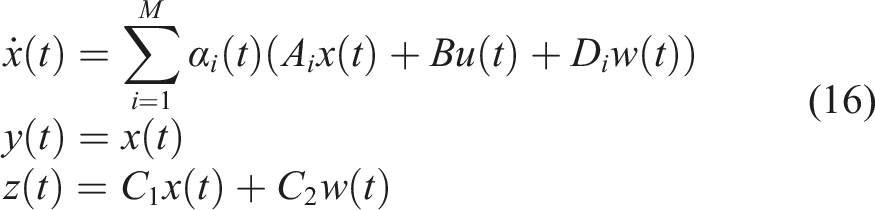
2. Description of quarter-vehicle model
This paper focuses on analyzing a quarter-vehicle model as shown in Figure 1. Consider the following equations A model depicting a quarter car with a semi active suspension.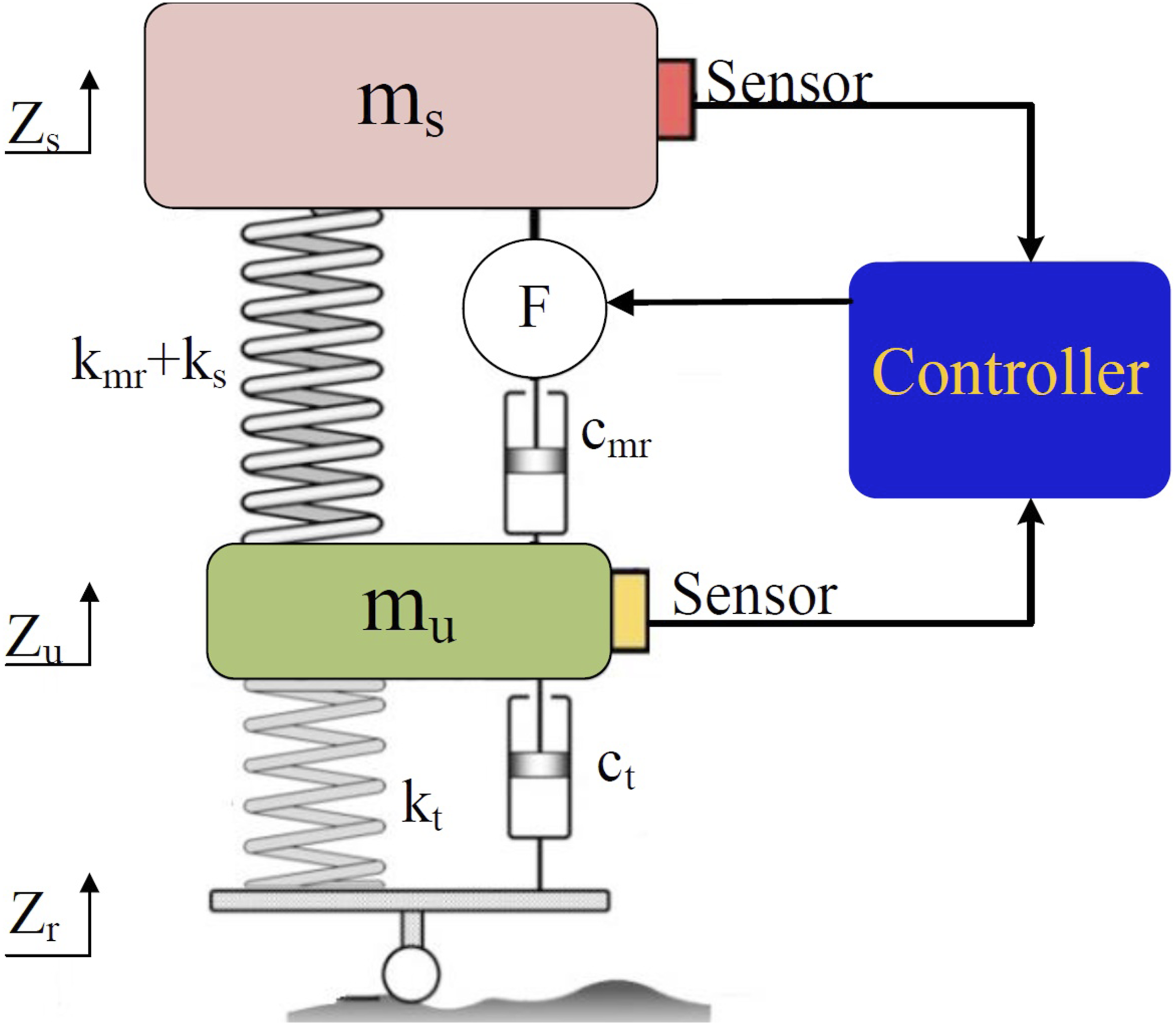
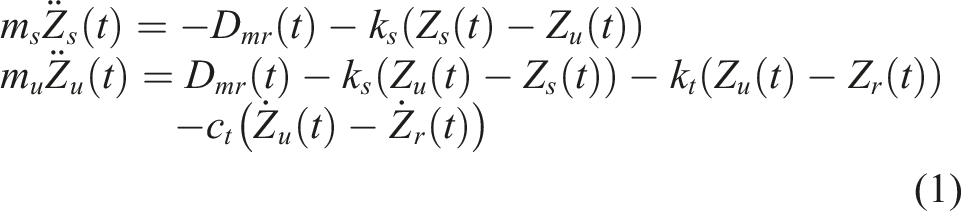
The vehicle body is characterized by the sprung mass m s , while the wheel setup is represented by the unsprung mass m u . The semi-active damper force is indicated by D mr (t), with Z s and Z u symbolizing the displacements of the sprung and unsprung masses, respectively. The road displacement input is Z r , and the stiffness of the suspension system is denoted as k s . The tire’s flexibility and damping properties are represented by k t and c t , respectively.
Consider the following equation for the semi-active damper
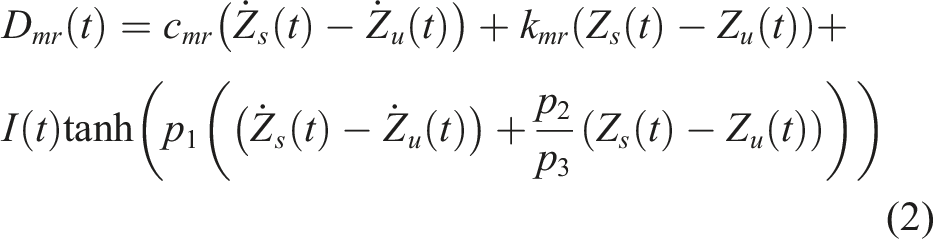
The proposed model in (2) has been validated by comparing it with experimental data and the bi-viscous hysteresis model using a damper force–velocity curve. As shown (Guo et al., 2006), the proposed model matches the experimental results more closely and provides higher accuracy than the bi-viscous hysteresis model. I(t) is the controllable force coefficient which is varying according to the electrical current in the coil (0 ≤ Imin < I ≤ Imax) (Do et al., 2010b). In this context, p1, p2, and p3 are constant parameters, while c mr and k mr represent the damping and stiffness parameters, respectively. The semi-active damper model described in (2) is selected for its high fidelity in capturing the bi-viscous and hysteretic behavior of MR fluids. A similar hyperbolic-tangent-based parameterization was recently successfully employed in (Viadero-Monasterio et al., 2024) for the design of robust static output feedback controllers. In this work, however, this model is further embedded into a parameter-varying framework.
Subsequently, we must develop the LPV model. This entails articulating the nonlinear model (1) and (2) within the LPV framework. Let us designate

The quarter car model in state space form can be expressed as follows
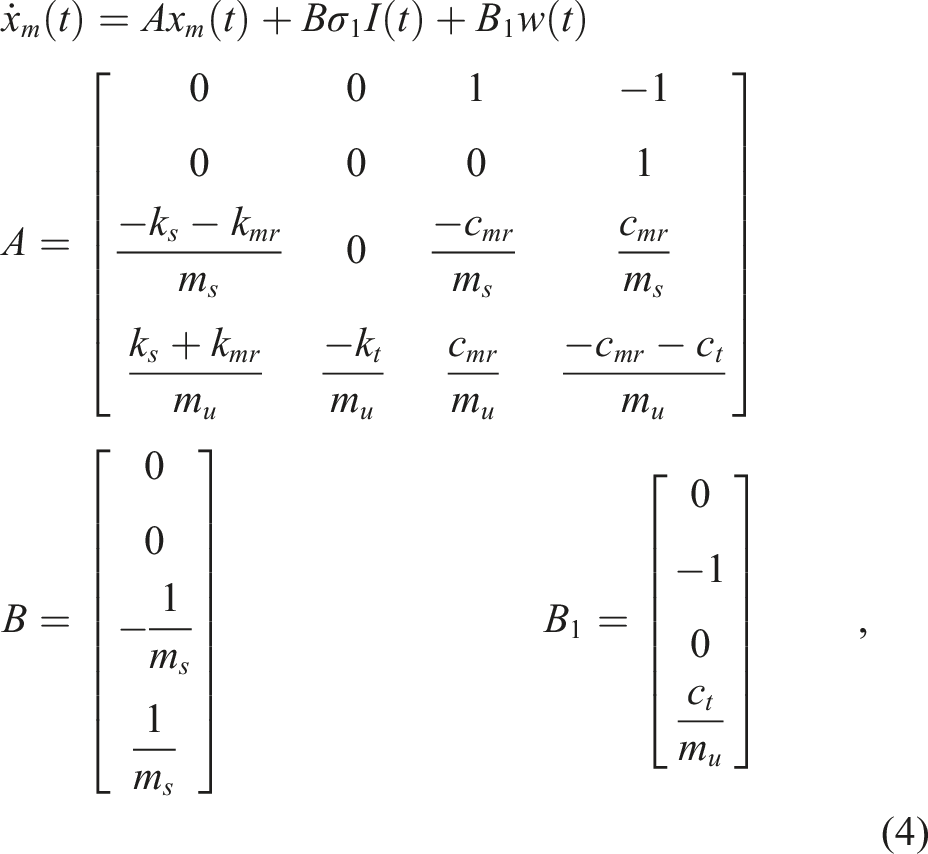
The state variables are delineated as follows. xm1(t) = Z
s
(t) − Z
u
(t) denotes the suspension displacement, xm2(t) = Z
u
(t) − Z
r
(t) signifies the tire displacement,
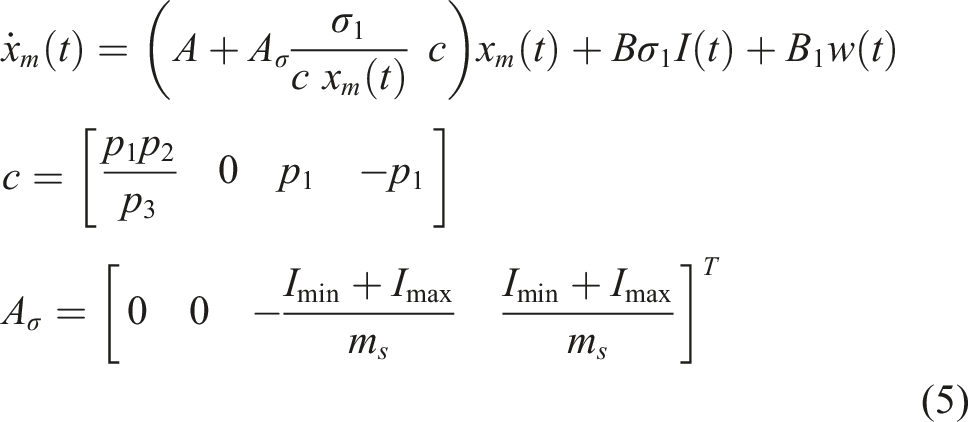
The parameter-dependent control input matrix in (5) presents difficulties for the H
∞
design problem of polytopic systems. To address this issue, a solution can be implemented by incorporating a strictly appropriate filter into (5), thus generating an input matrix that is unaffected by the parameter. Examine the subsequent filter in the system’s input


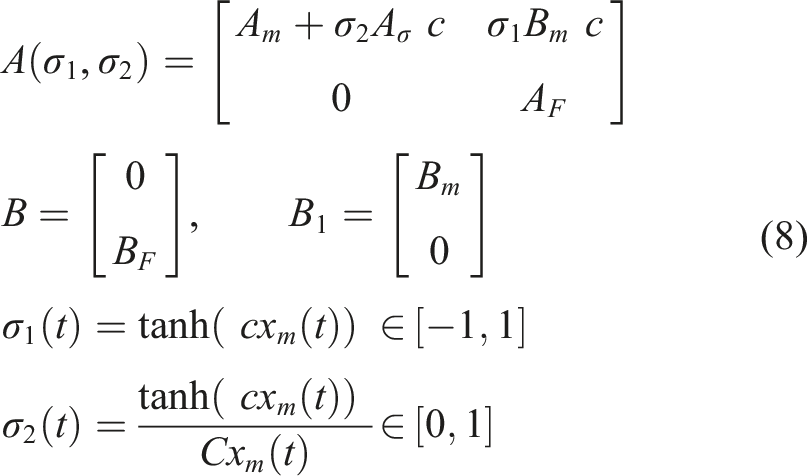
When the original input matrix depends on the scheduling parameters, direct design of a parameter dependent state feedback controller leads to non convex BMI conditions. By augmenting the system with a stable pre filter, the input matrix of the augmented model becomes constant, which restores convexity and allows the LMI based synthesis. This technique is standard in LPV control, see
Sehr and De Oliveira (2017)
for a detailed discussion.
Let’s suppose that A
i
represents the values of A (σ) at the four corners of the parameter box. The state-space of the polytopic LPV system can be described using the subsequent expressions



The values α
i
are convex coordinates, meeting the conditions 0 ≤ α
i
(t) ≤ 1 and
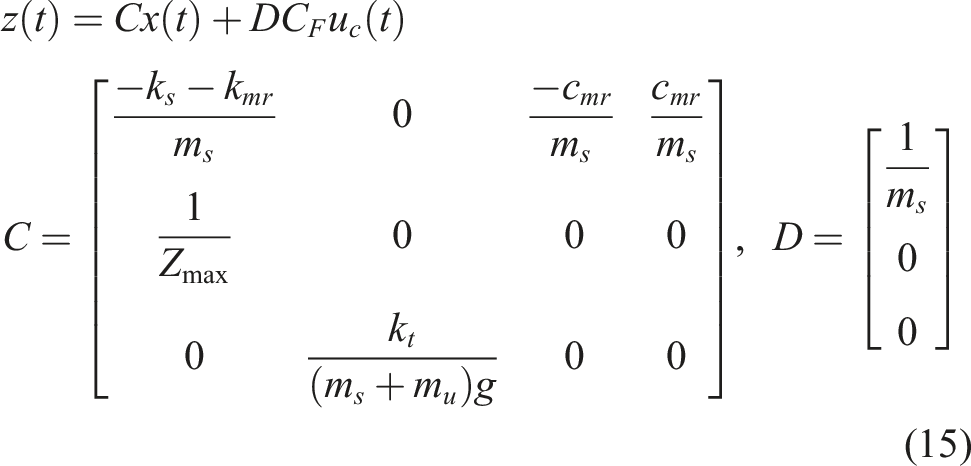
In vehicle suspension systems, the control design involves a fundamental trade-off between three conflicting objectives: ride comfort, suspension travel, and road-holding. While minimizing sprung-mass acceleration (1) The suspension movement should stay within a predetermined maximum limit imposed by the system (2) Consistent contact between the wheels and the road surface is ensured by maintaining the dynamic tire load below the static tire load


The outputs are defined as
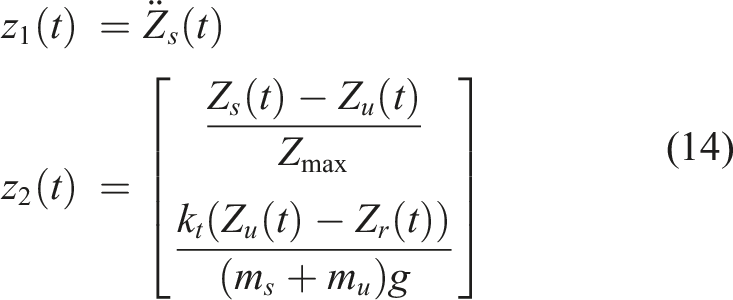
This can be expressed using the following model
2.1. Problem formulation
The state-space representation of polytopic LPV systems is characterized by Closed-loop p-LPV sampled-data control system.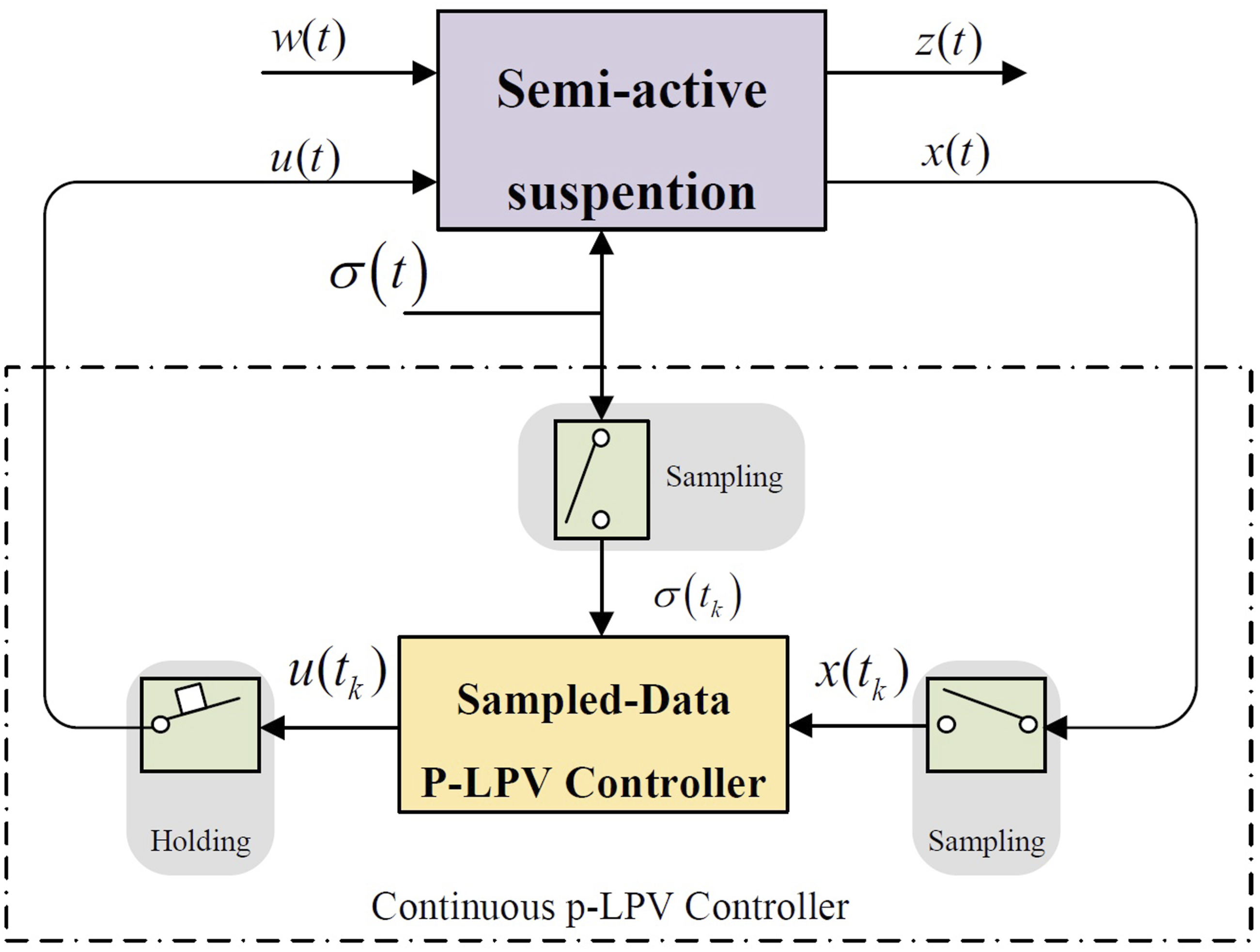


The combined closed-loop interaction between (16) and (18) can be described as follows

The delay introduced by the sampler is specified as follows

The maximum sampling time is denoted as

The discrepancy between the actual continuous polytopic parameters of the plant and the discrete piecewise constant polytopic parameters managed by the controller is influenced by the frequency of parameter changes over time and the length of the sampling interval. With considering

By employing (21) and using the mean-value theorem, the following relation is derived

Hence, we have

Since,
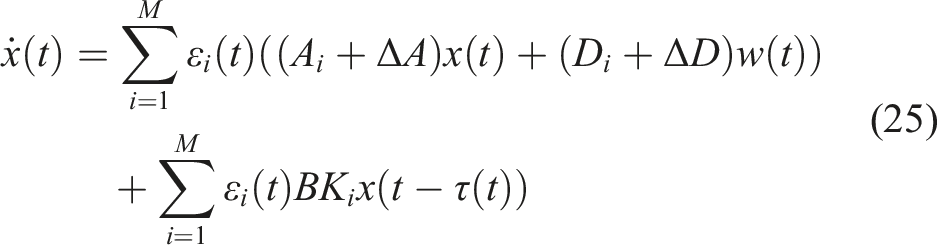
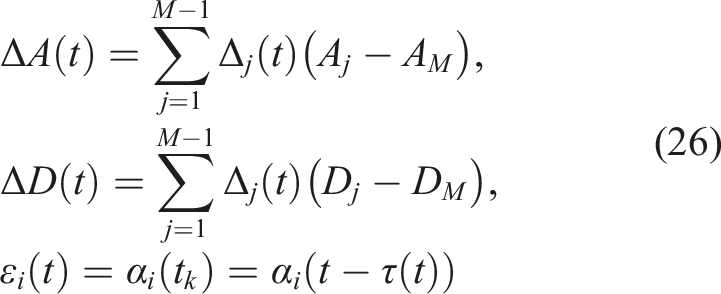
The stability analysis and design issues in equation (19) can be reformulated as the same problem presented in equation (25). This equivalence can be readily verified by employing convex optimization techniques at the vertices of the model. This methodology effectively converts the uncertainty in the controller’s measured parameters into uncertainties within the plant’s parameters, resulting in a closed-loop sampled-data system represented by a double-layer polytopic model, as illustrated in Figure 3. A two-layer polytopic LPV framework is used to describe the sampled-data semi-active suspension system.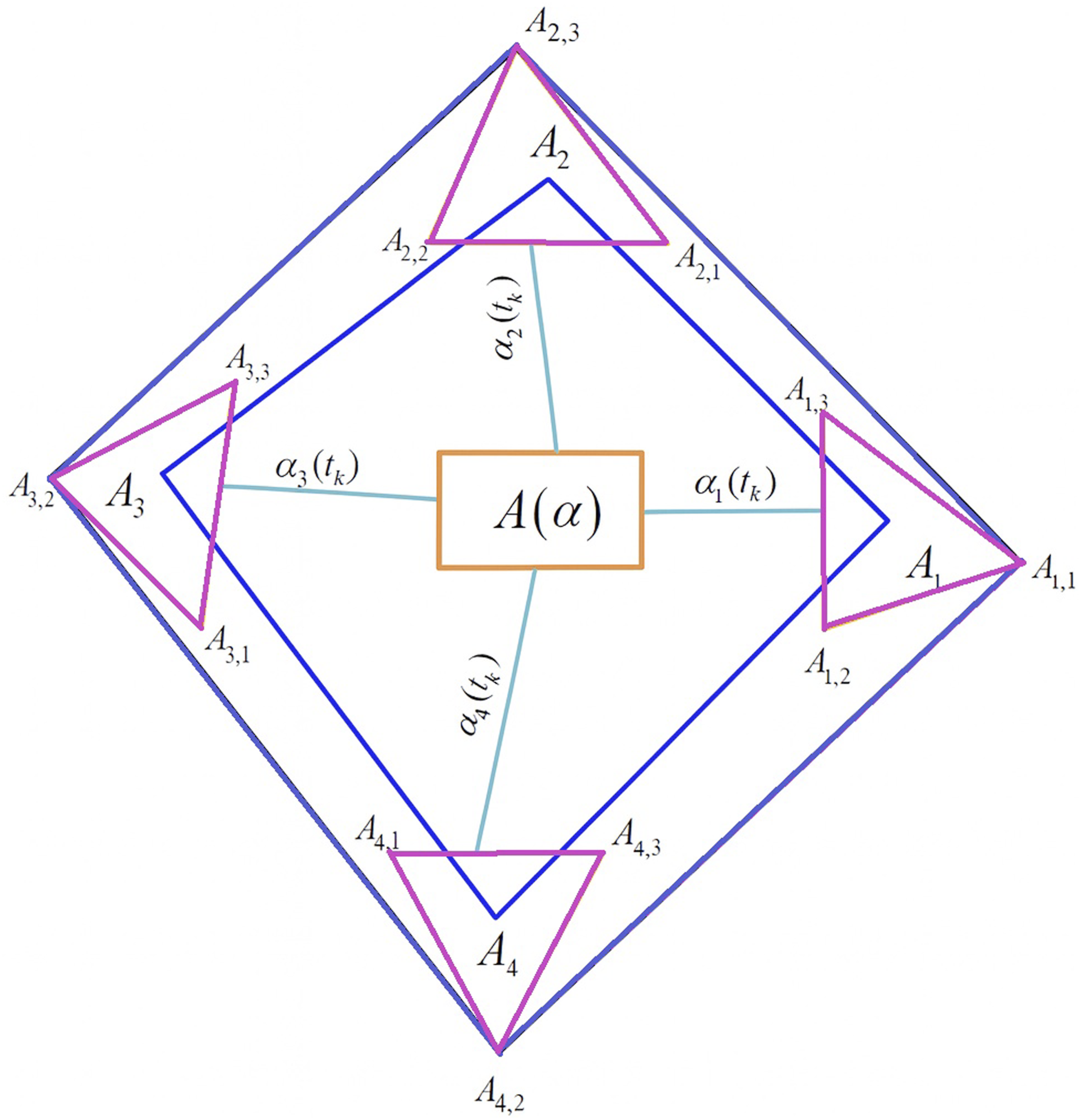
The uncertainties, ΔA and ΔD, are influenced by variations in the sampling period, and their respective bounds play a critical role in determining the controller’s robustness. As these bounds increase, the controller must accommodate a broader spectrum of potential system behaviors, which typically necessitates a more conservative design. While this added conservatism enhances robustness, it may also lead to a compromise in system performance.
The proposed control strategy assumes full state feedback. In commercial series-production vehicles, while suspension displacement xm1 (via LVDTs) and body acceleration
2.2. Sampled-data stabilization condition
In this section, we aim to establish sufficient conditions for stabilizing the sampled-data p-LPV system using a time-dependent LKF. We will first present some lemmas that are essential for proving these conditions.
(Apkarian and Gahinet, 1995). For matrices A, B and R >0 with the correct dimensions, the following inequality is satisfied

(Basargan et al., 2022b). Considering a given positive definite matrix U, the subsequent inequality is valid for all continuously differentiable functions
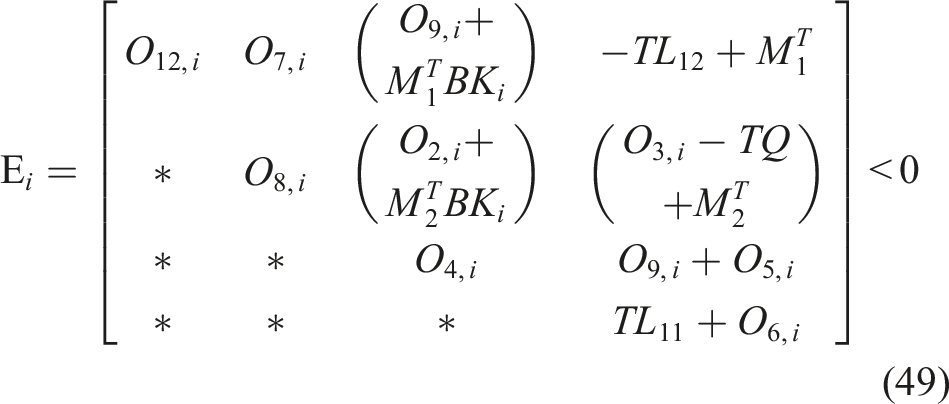
(Hooshmandi et al., 2020a). Given a symmetric matrix X and two matrices F and Z the problem The following theorem establishes conditions for the asymptotic stabilization of the p-LPV system defined in equation (25) in the absence of disturbances. The model is defined as follows For simplicity, explicit dependence on t is sometimes omitted in the notation.



Assume there exist matrices

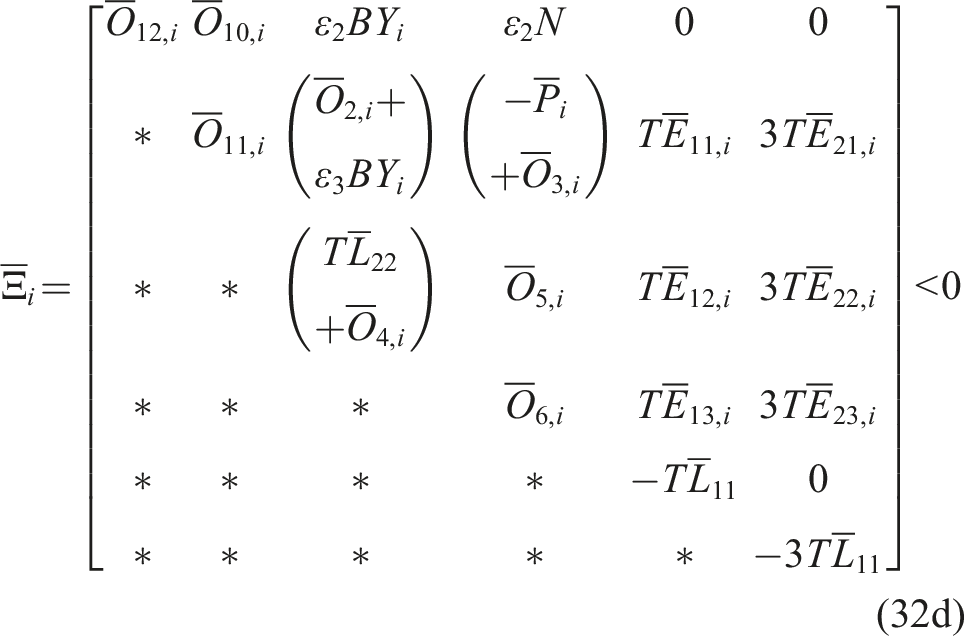
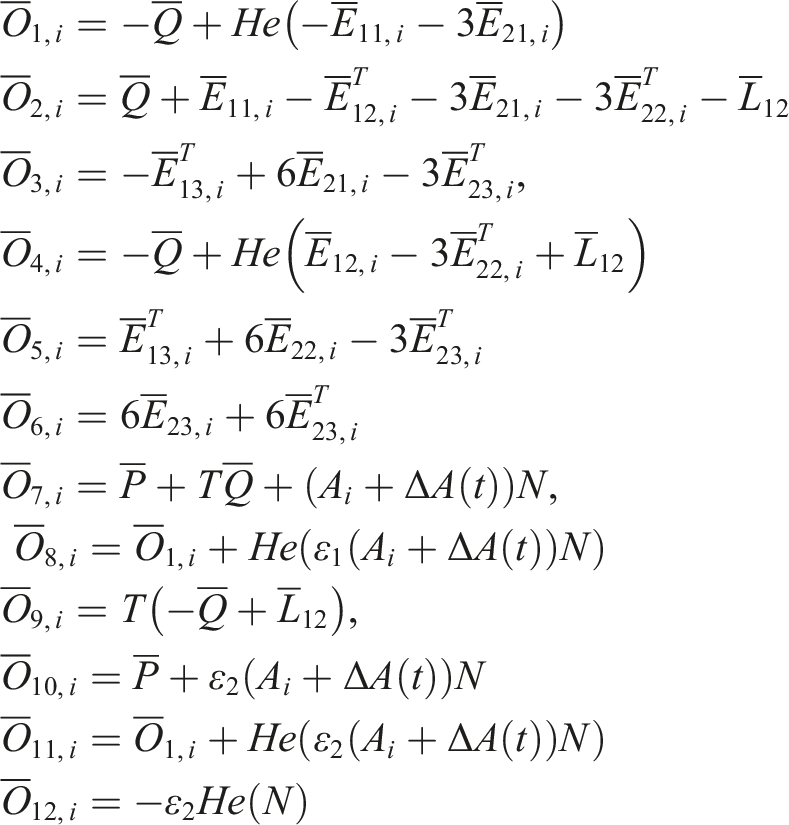
Consequently, the p-LPV controller specified in equation (18), where the vertex gains are determined as K i = Y i ⋅ N−1, ensures asymptotic stability of the system described in equation (31) provided that the sampling intervals are sufficiently small, specifically T >0.
Proof. Take into account the presented LKF for the purpose of stability analysis

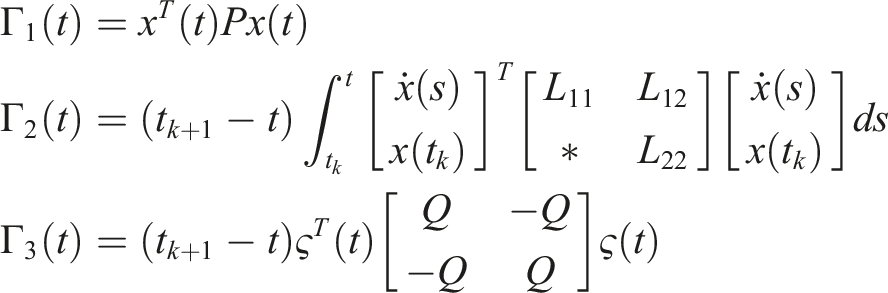
In the first step, we establish constraints on the matrices within the LKF to ensure their positivity. Specifically, L11, L22 ∈ S
n
must be positive for the integral terms. Combining these with the non-integral terms, we get

As long as P > 0 and the following condition is satisfied

this ensures that there exists a small ɛ such that

The stability condition is derived from the time derivative of the LKF. The derivative of the Lyapunov function Γ1(t) along the trajectory of the system is expressed as follows
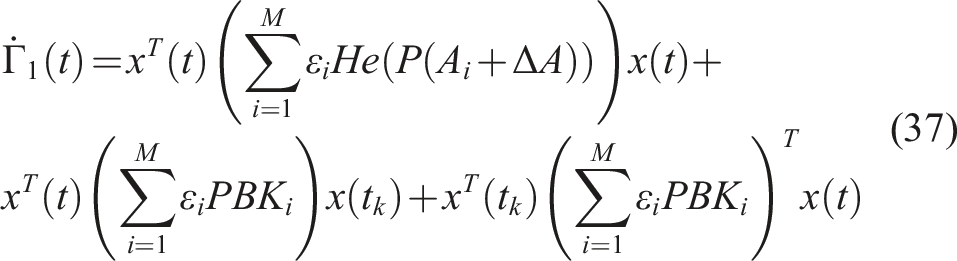
Similarly, the derivative of the Lyapunov function
Upon differentiating
Taking into consideration (31) and Lemma.1, we arrive at the following inequality
By introducing the vector ζ(t) defined as

and utilizing Lemma.2, we arrive at
By employing Lemma.1, the subsequent inequalities are substituted into equation (42)
Therefore
For τ = 0, the following conditions for i = 1, 2, …, M

implies

Also for τ = T

implies
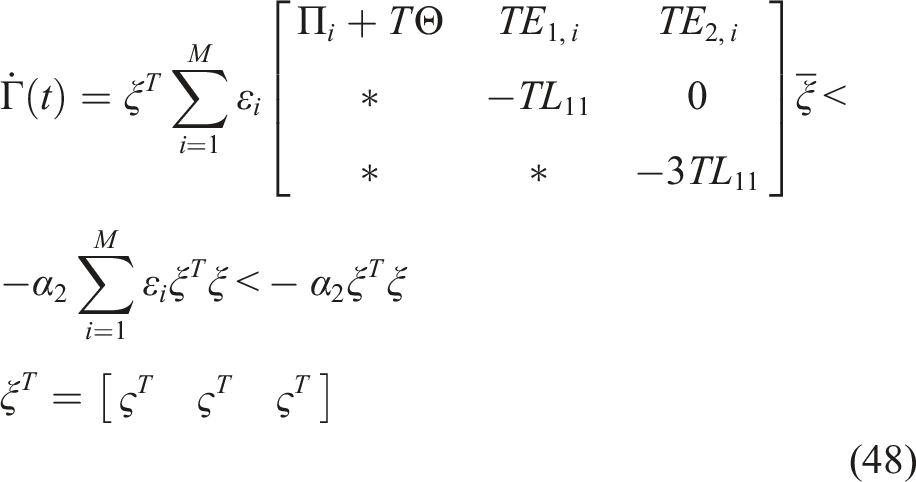
Given that equation (44) is linear in τ, there exists a small positive scalar α such that
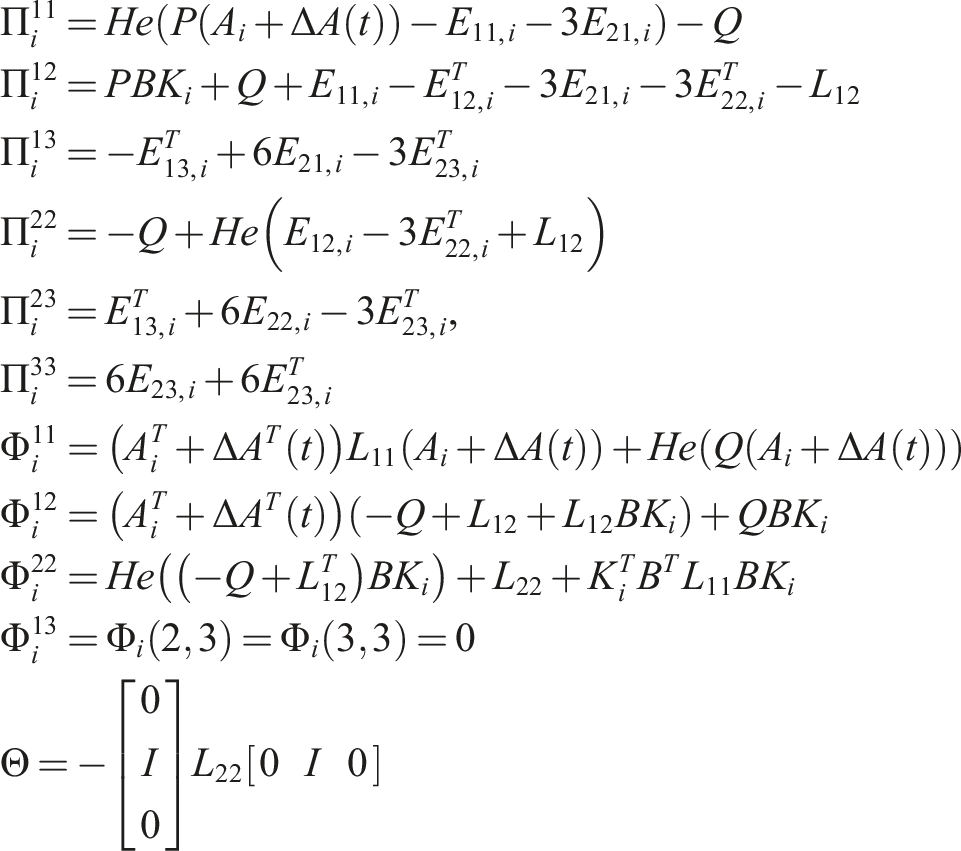
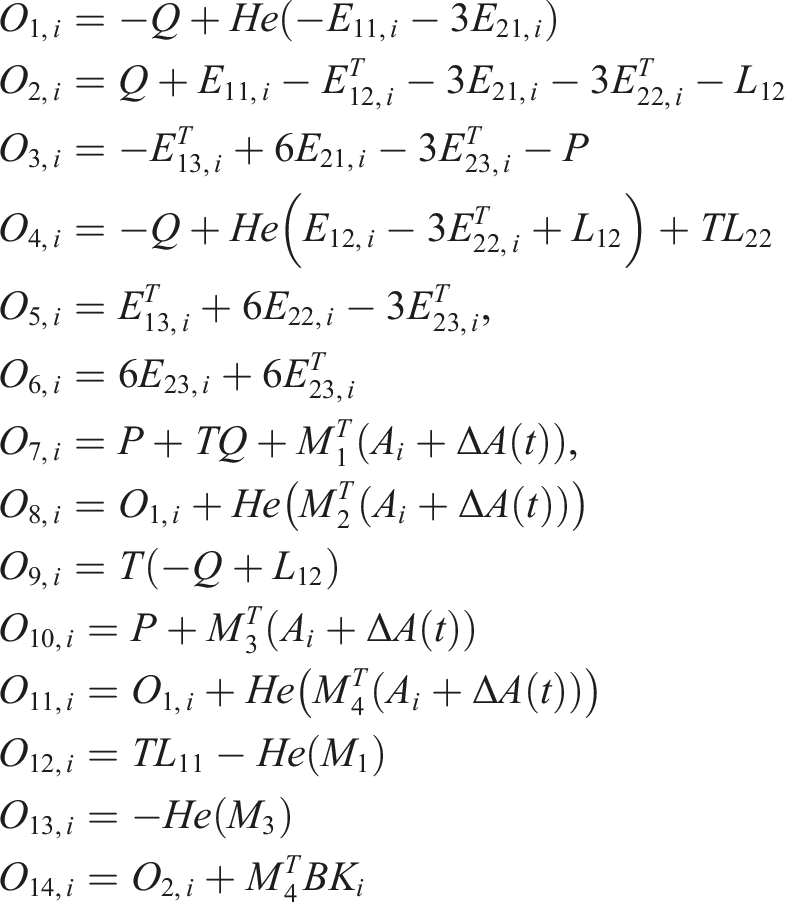
The stability criterion outlined in (45) and (47) are not well-suited for the design of sampled-data p-LPV controllers. This inadequacy arises from the interaction between the system matrix A
i
and decision variable matrices, such as P, L11, and Q. To address this issue, these LMI conditions are reformulated using the projection lemma. We utilize Lemma.3 and derive the following conditions
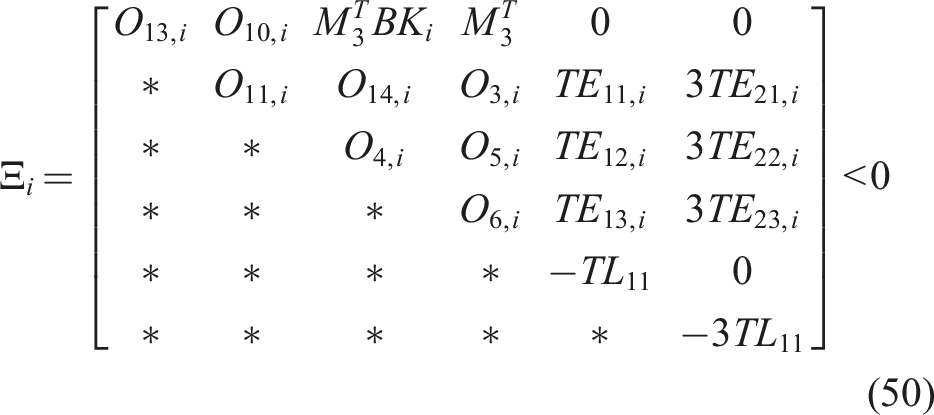


Let’s rewrite equation (51) as

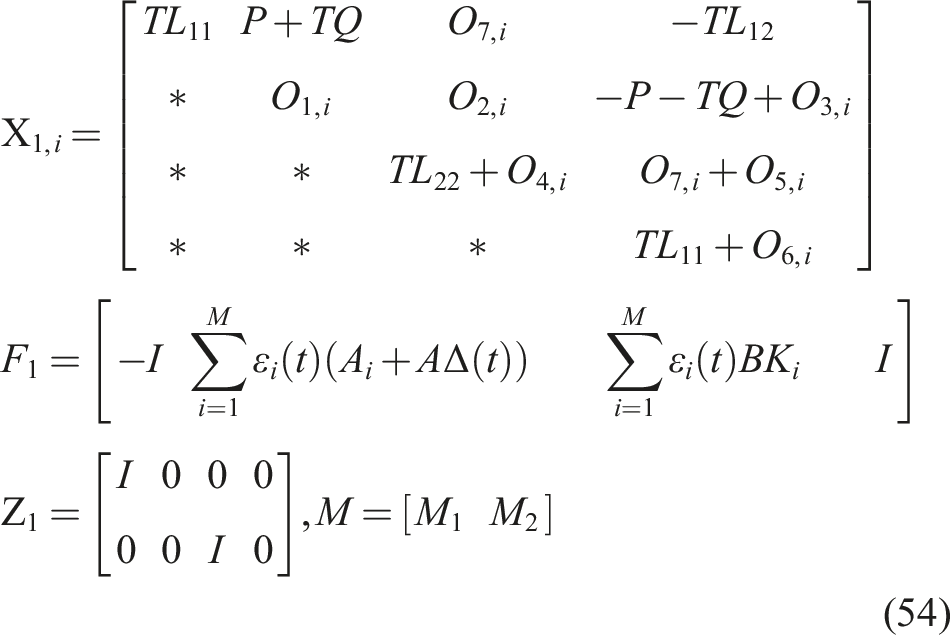
Now, let’s rewrite equation (52) as

M1, M2, M3, and M4 are the slack matrix variables. Consider the following null spaces of F1 and F2
By applying Lemma.3, we have

and
Therefore, the satisfaction of equation (49) indicates that equation (45) is also feasible. Similarly, if equation (50) is feasible, then equation (47) must be feasible as well.
Applying the congruent transformation diag (N, N) to (35) and
with considering

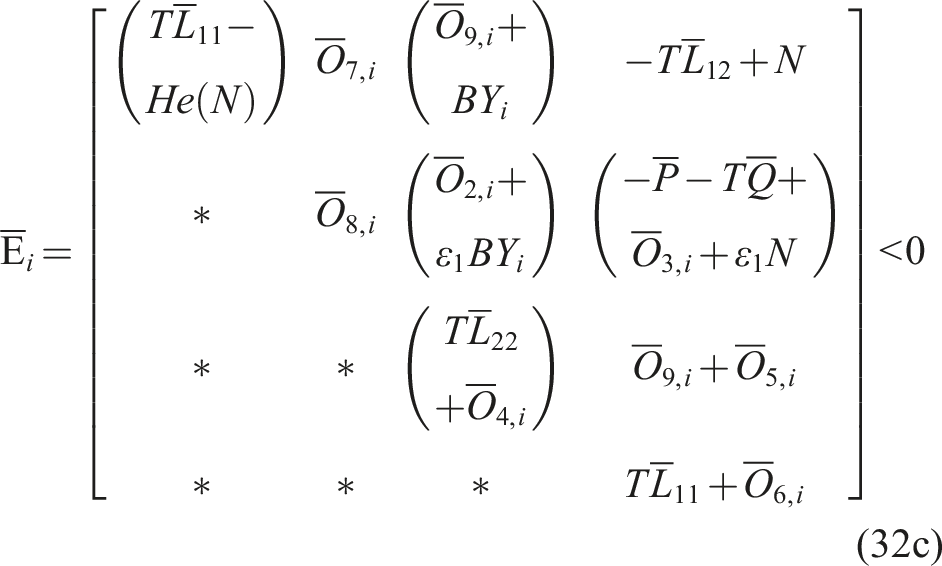
The LMI conditions in equations (32a) and (32b) are obtained. Additionally, by using the congruent transformations diag (N, N, N, N) and diag (N, N, N, N, N, N) to equations (49) and (50), and taking into account
the LMI conditions in equations (32c) and (32d) are derived. This concludes the proof.
2.3. H∞ controller synthesis
In this section, we consider parameter uncertainty in the system described by (25) in the design requirements for a p-LPV controller to achieve H
∞
objectives as a convex optimization problem. This design approach excludes state delays and aims to meet specific H
∞
performance objectives. The model is defined as follows
The following theorem provides a set of LMIs for calculating the feedback gain matrices K i . These LMIs ensure that the controller achieves robust performance and stability by handling disturbances and parameter uncertainties effectively. This guarantees that the closed-loop system can withstand external disturbances and parameter variations, maintaining the desired performance level.
The p-LPV system described in (62) exhibits stability and achieves H
∞
performance, given γ ≥ 0, under zero initial conditions if there exist positive definite matrix functions Proof. As is well known, the H
∞
stability criterion can be derived from Let Γ(t) = x
T
(t)X−1x(t) and substitute equation (62) into equation (64) As a result, pre and post multiplying (66), bay diag (X, I) and its transpose yield with considering K
i
X = Y
i
By employing the Schur complement, we arrive at the following inequality, which serves as the H
∞
constraint for the closed-loop system when X >0 Therefore, the H
∞
stability condition given in equation (64) can be ensured by equation (68).


The main aim is to find the feedback gain matrices K
i
that meet the H
∞
performance criteria in the context of sampled-data implementation. To achieve this, we considered the conditions from the sampled-data p-LPV controller design in Theorem 1 and the H
∞
p-LPV controller design in Theorem 2. Each theorem independently provides a method for designing a controller; however, by incorporating both approaches, a controller is obtained that possesses the two desired properties: robust H
∞
performance and stability in sampled-data implementations. This combination, assuming N and X are equivalent, yields an LMI-based stabilization condition capable of achieving disturbance rejection while considering sample-and-hold constraints. As a result, the proposed method represents a novel approach to designing H
∞
and sampled-data p-LPV controllers, leading to improved performance with sampled-data controllers.
3. Simulation and experimental results
3.1. Simulation results
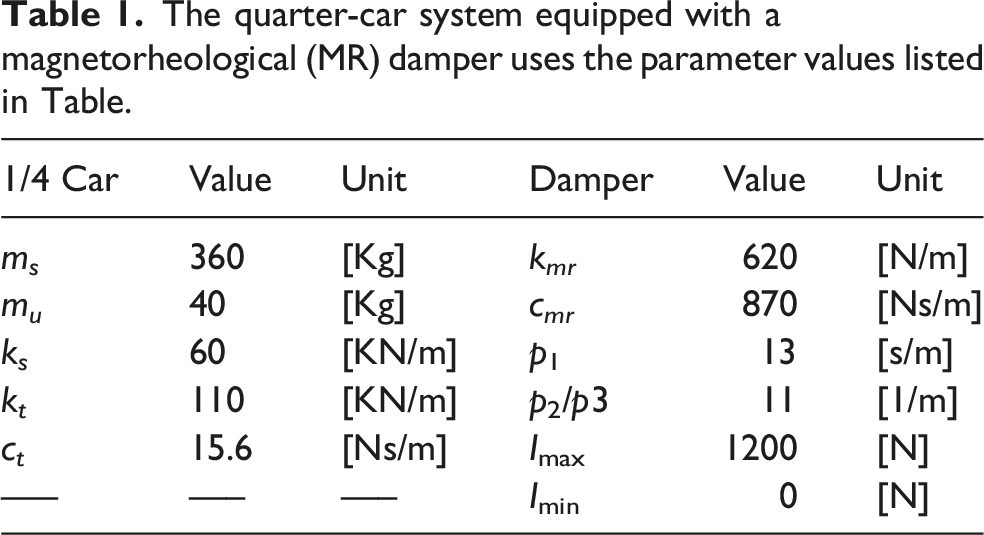
The quarter-car system equipped with a magnetorheological (MR) damper uses the parameter values listed in Table.
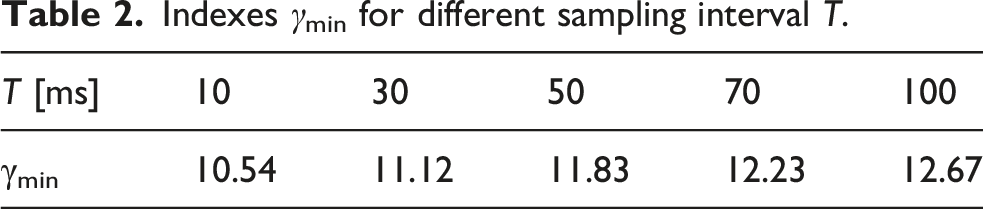
To determine the smallest γmin with a sampling interval less than T = 100 ms, we solved the LMIs outlined in Theorem 1 and Theorem 2. This was achieved using the YALMIP toolbox (Lofberg, 2004) and the PENBMI solver (Lofberg, 2004). We also included a filter F(s) = 50/s + 50 with a wide bandwidth for the system input. The calculations resulted in a γmin value of 12.67, and the corresponding controller gain matrices were obtained as follows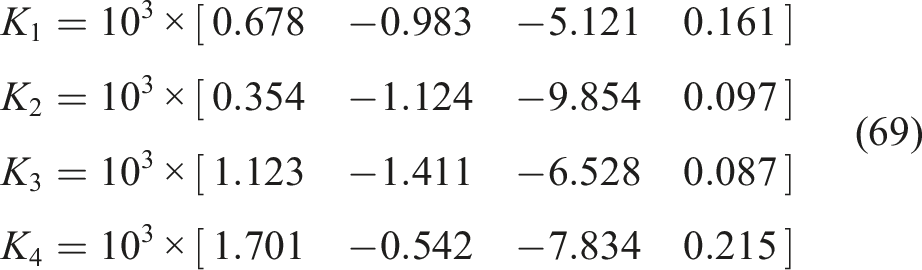
Indexes γmin for different sampling interval T.
To evaluate the effectiveness of our new method, we compared the ControllerI with that of ControllerII, which is a continuous H ∞ LPV controller (Apkarian and Gahinet, 1995).
In the first simulation scenario, we model road disturbances as brief but intense events, like large bumps or potholes. The height of these bumps is denoted by S, and their length by l. The road surface is described accordingly
These values are set to 50 mm and 6 m, respectively. Also, we consider the vehicle’s forward velocity to be v = 35 km/h.
The road disturbances used in the simulations and experiments are selected such that the required control effort naturally remains within the physical limits of the MR damper. Therefore, the theoretical results in this work are obtained under the assumption that the actuator operates within its admissible range without reaching saturation. A more rigorous mathematical treatment of actuator saturation (e.g., using sector-bounded modeling, anti-windup compensation, or invariant-set constraints) is beyond the scope of this study and is reserved for future research.
The simulation outcomes, utilizing a sampling interval of T = 10 ms, are depicted in Figure 4. This figure displays the speed of the sprung mass, suspension displacement, tire displacement, and control efforts for both active controllersI and II. ControllerII exhibits marginally improved responses than ControllerI. This is mainly because it doesn’t take into account the limitations of the sampling time, which makes it less conservative. Responses of the quarter-car suspension model utilizing a maximum sampling interval of T = 10 ms.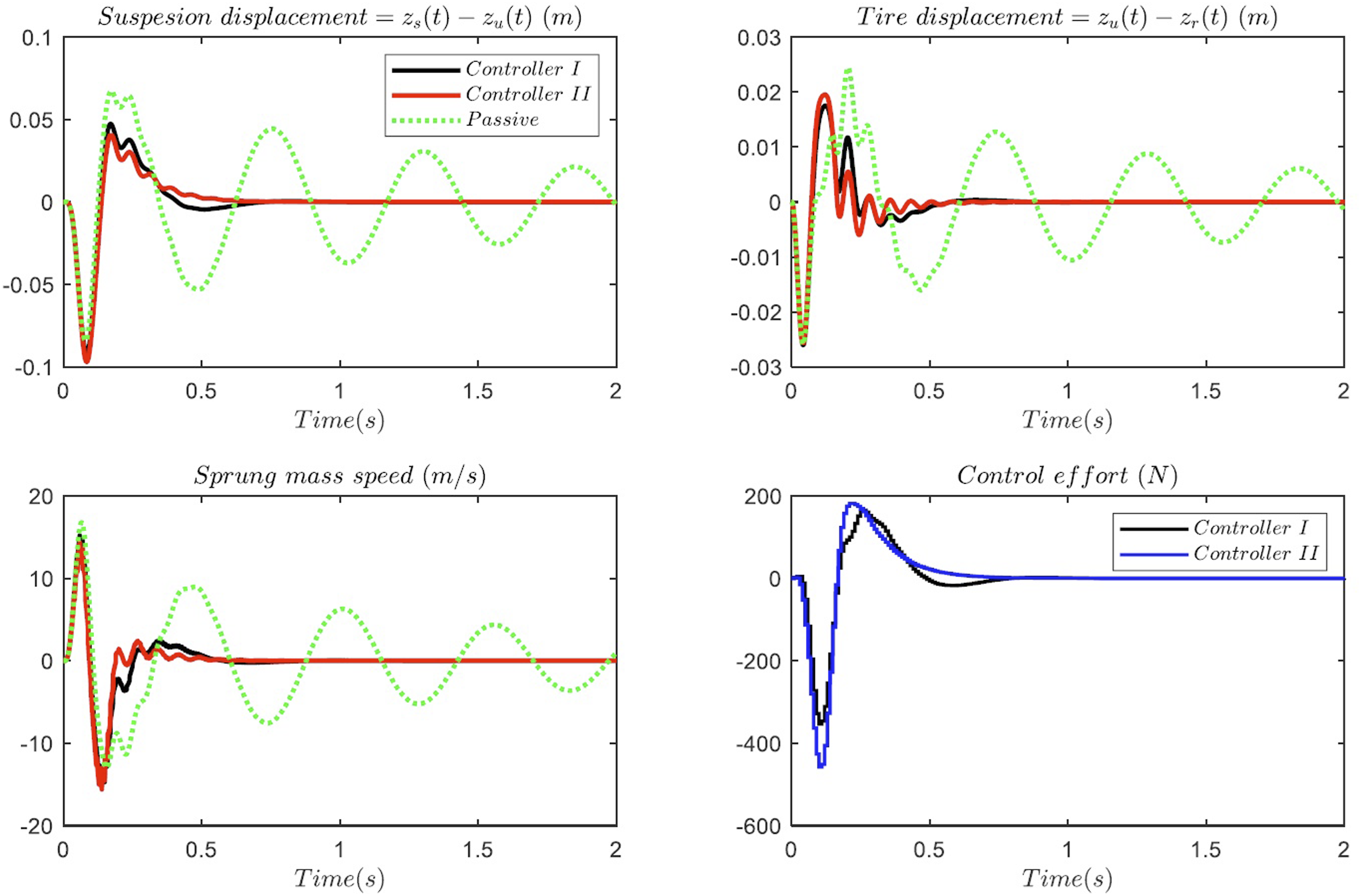
To showcase the advantages of the proposed controller, we increase the sampling period to T = 70 ms and repeat the same simulations. The system responses under both semi-active suspension systems, as well as the passive suspension system for this scenario, are visualized in Figure 5. This figure provides insights into the speed of the sprung mass, suspension displacement, tire displacement, and control effort. It’s worth noting that, with a sampling period of T = 70 ms, controllerII is no longer able to maintain the stability of the suspension system. In contrast, controllerI continues to stabilize the closed-loop system without a noticeable decline in performance. Responses of the quarter-car suspension model utilizing a maximum sampling interval of T = 70 ms.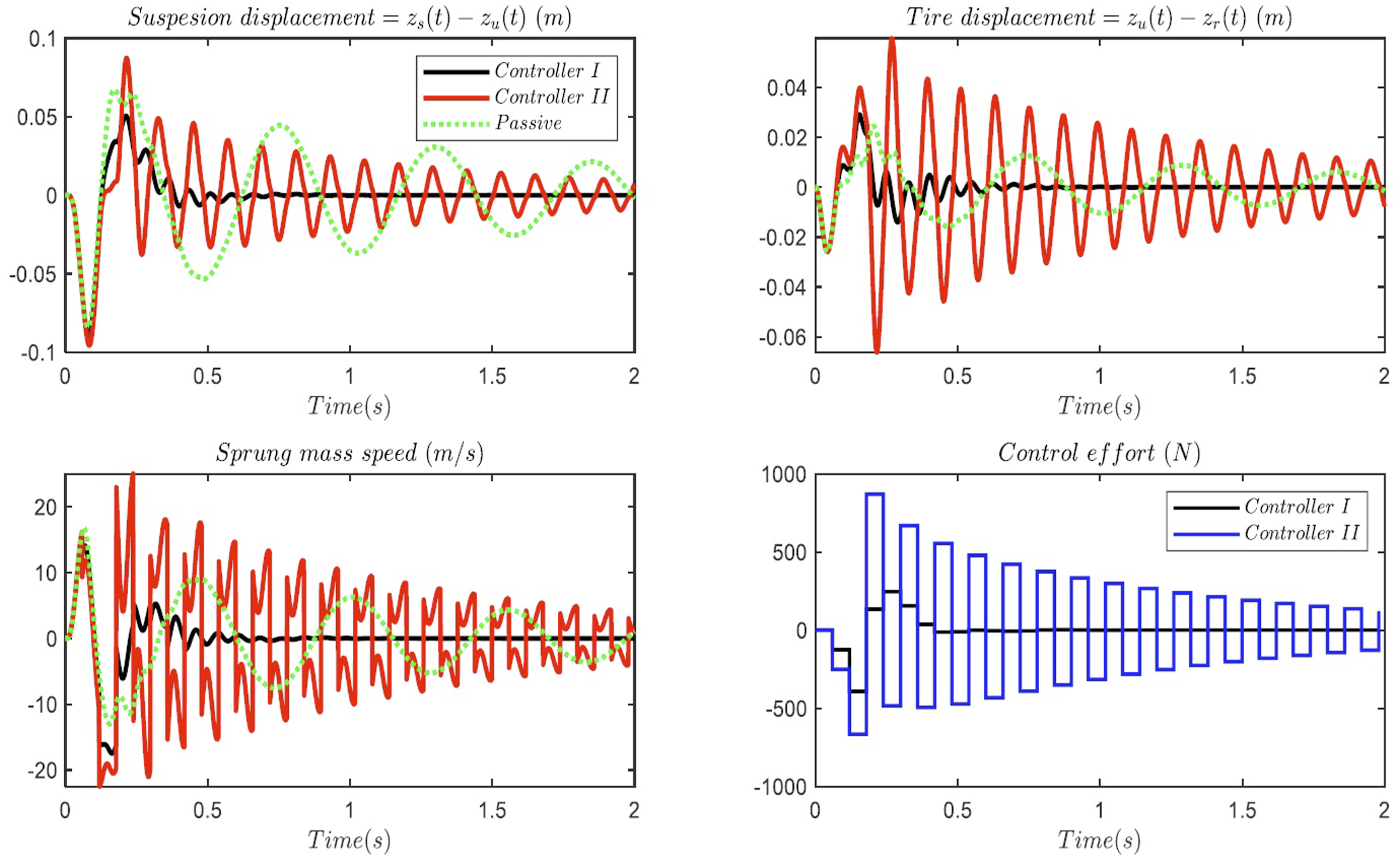
The simulation results highlight the substantial influence of the sampling period on the ride comfort within suspension control systems. Given the limitations of computation and communication time in a car’s ECU, we can infer that the proposed sampled-data
H
∞
p-LPV control method effectively bridges the gap between control theory and its practical application in vehicle suspension systems.
In the second simulation scenario, road disturbances are modeled as random vibrations characterized by a specific power spectral density
Assuming the vehicle travels on a road with a length of L at a speed V0, the force resulting from road irregularities is represented by the following series
Considered as random variables, the phases φ n follow a uniform distribution within the interval [0, 2π).
RMS values of sprung mass speed, suspension displacement, and tire displacement for various sampling times.
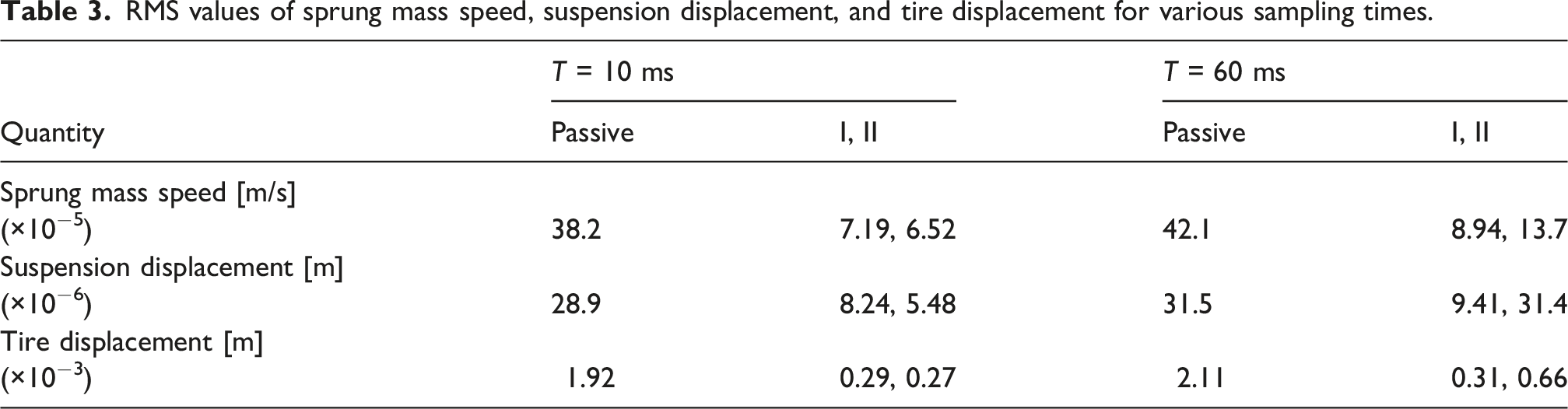
Table.3 shows that both controllers outperform the passive suspension system for various sampling times. The RMS values of sprung mass speed, suspension displacement, and tire displacement are nearly identical for Controller I and Controller II with small sampling times τ = 10 ms. However, with a longer time delay (τ = 60 ms), ControllerI, which accounts for the sampling time, improves ride comfort and meets strict constraints under different road conditions. This improvement is significant when compared to ControllerII, which does not consider the sampling time delay. Taking into account the random vibrations in the road profile as defined in equation (72), Figure 6 depicts the responses of the suspension model with a sampling interval of T = 60, ms. Responses of the quarter-car suspension model utilizing a maximum sampling interval of T = 60 ms.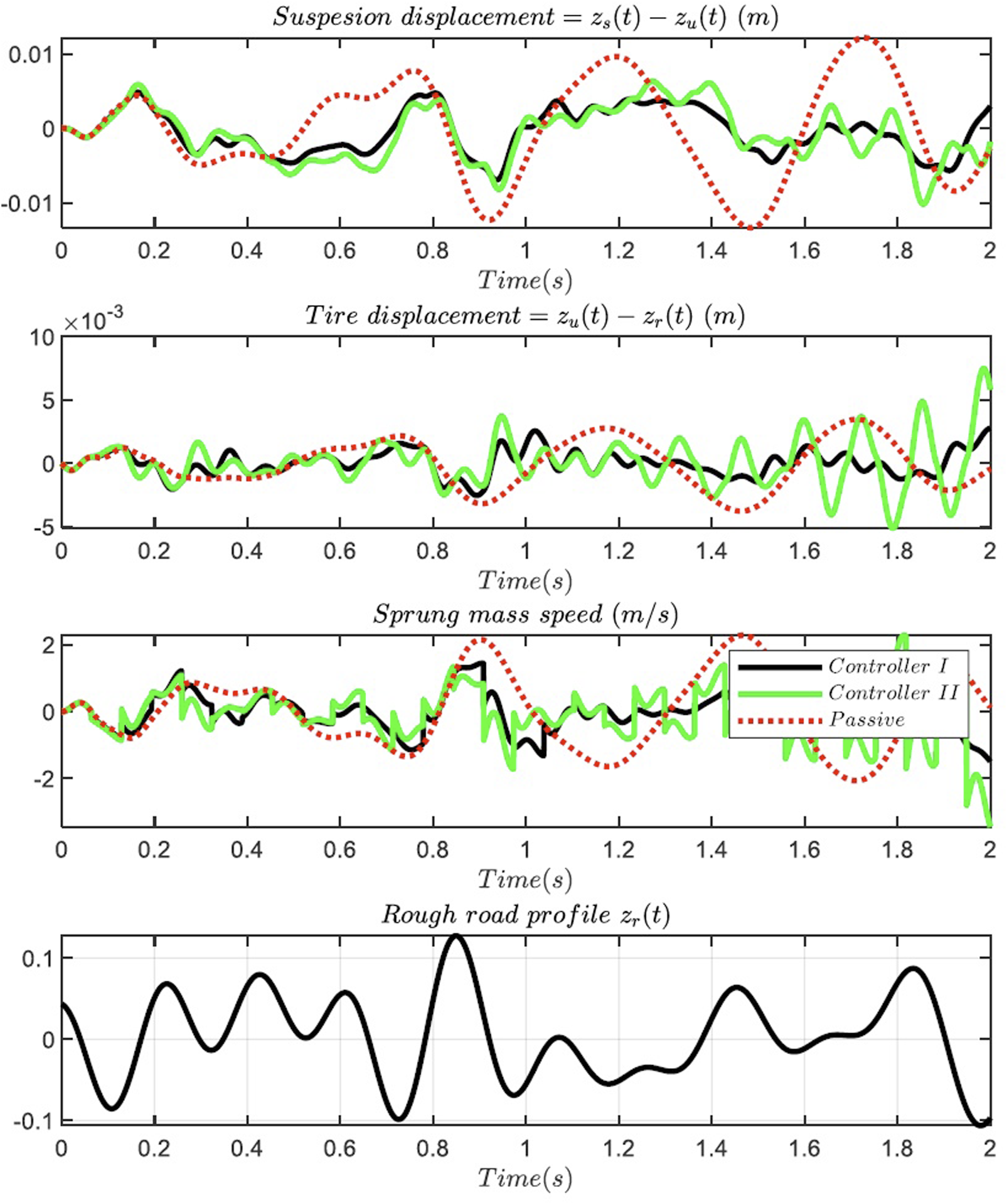
By considering the sampling period, we have demonstrated that, for a 10 ms sampling period, the performance of both is nearly the same. However, for sampling periods of 70 ms and 60 ms, which simulate the worst-case scenarios, the proposed method performs better under these conditions. It is important to note that the computational complexity is not increased, as both controllers are LPV-based and have the same computational complexity. The advantage of the proposed method lies in its ability to handle aperiodic sampling and ensure better performance under worse-case conditions, without a significant increase in computational load.
3.2. Experimental results
To bridge the gap between numerical simulation and practical implementation, a Hardware-in-the-Loop (HiL) real-time validation was conducted. As illustrated in Figure 7, the experimental architecture comprises a Host PC, a Speedgoat Baseline Real-Time Machine, and a high-speed communication link. In this configuration, the quarter-vehicle suspension plant—utilizing the high-fidelity nonlinear model and parameters defined in Table 1 was executed within the MATLAB/Simulink environment on the Host PC. The proposed aperiodic LPV controller was implemented on the Speedgoat real-time hardware, which acts as the industrial-grade engine control unit (ECU). The Speedgoat machine is equipped with a 2 GHz quad-core CPU and operates under a Real-Time Operating System (RTOS) to ensure the deterministic execution of the control law. Experimental setup including the Host PC and the Speedgoat baseline real-time machine.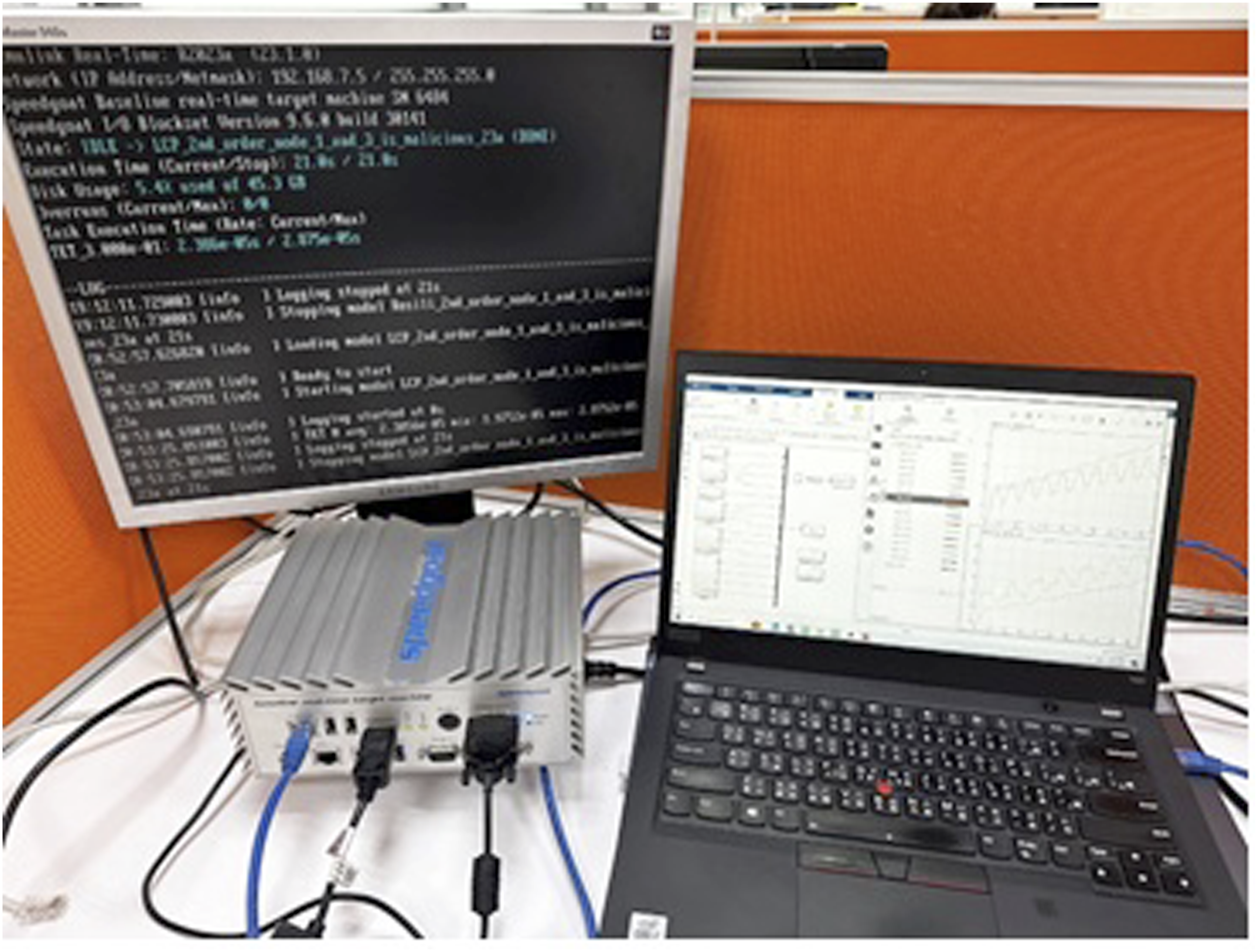
The communication between the virtual plant (Host PC) and the hardware controller (Speedgoat) was established via a low-latency Ethernet link. To realize the aperiodic sampling investigated in the theoretical sections, two factors were utilized: first, the inherent stochastic timing jitter and variable latencies arising from the non-real-time environment of the Host PC and second, an additional random delay introduced into the communication link from the Speedgoat back to the Host PC. Together, these mechanisms simulate the irregular update intervals typical of a networked control system, causing the sampling period in our experiment to vary unpredictably within the range of 10 ms–60 ms.
The trigger logic was implemented such that the Speedgoat controller computes a new control command only upon receiving a fresh measurement packet from the plant. Crucially, the actual elapsed time since the previous update is measured directly on the Speedgoat hardware and is utilized as the real-time sampling period τ(t) within the control law. This HiL validation proves that the proposed LPV gain-scheduling logic is not only computationally feasible for real-time applications but also robust against the non-deterministic timing conditions common in networked automotive systems.
Figure 8 presents the experimental results for the same bump road disturbance used in the first simulation scenario, with sampling intervals varying randomly within the range of 10 ms–60 ms. The responses show that the proposed aperiodic sampled-data H
∞
p-LPV controller maintains closed-loop stability and achieves satisfactory ride comfort, thus validating the theoretical findings under hardware-in-the-loop conditions. Experimental results for the sampled-data LPV controller under hardware-in-the-loop with road disturbances and sampling intervals between 10 ms and 60 ms.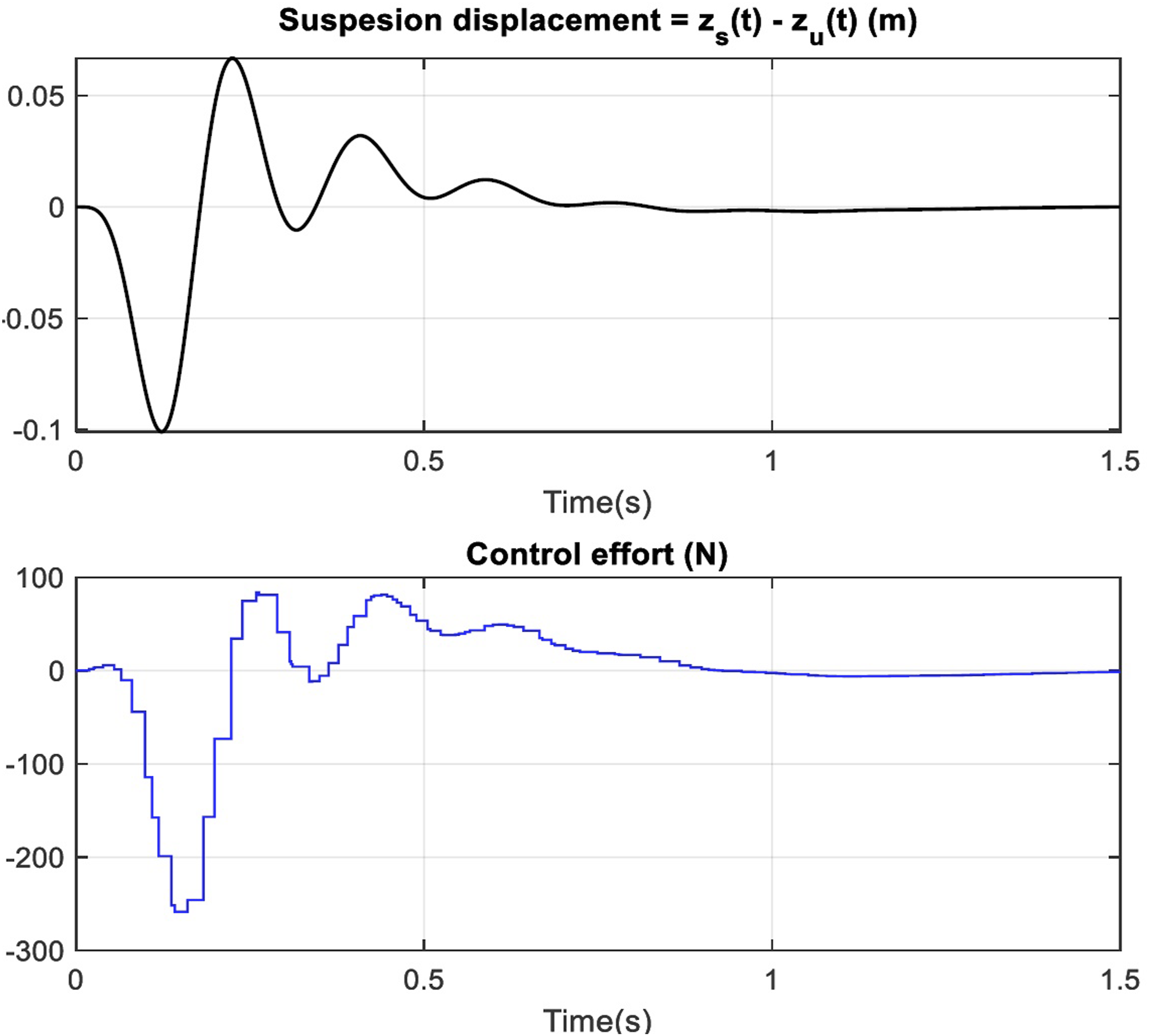
4. Conclusion
This article dealt with the aperiodic sampled-data H ∞ control of semi-active suspension systems by employing a polytopic LPV model. The p-LPV model used for suspension systems supports uncertainties arising from differences between actual and measured parameters. The paper establishes synthesis conditions for stability and H ∞ performance, employing a time-dependent Lyapunov–Krasovskii functional and Wirtinger’s inequality in the form of LMI. This design approach guarantees robust performance, even when dealing with changing sampling periods. The controller design algorithm was verified through numerical simulations, which confirmed the effectiveness of the proposed approach using the quarter-vehicle model. Future research directions may include addressing input saturation to enhance the controller’s adaptation to real-world applications.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.