
Abstract
This study proposes an intelligent diagnostic framework for high-accuracy, low-latency monitoring of heavy-haul railway wheelset wear under limited computational resources. The framework combines Variational Mode Decomposition (VMD)-based signal decomposition, multi-domain entropy features, and a lightweight attention-based classifier. The Grey Wolf Optimizer (GWO) is used offline to determine the key VMD parameters, which are then fixed for narrowband decomposition of wheel–rail contact acoustic signals during online diagnosis. Adaptive Time-Domain Discrete Entropy (ATDE) and Frequency-Domain Entropy (FDE) are extracted from each modal component to characterize dynamic complexity and energy distribution, thereby enhancing feature robustness and class separability. A One-Dimensional Convolutional Neural Network (1D-CNN) with an attention mechanism then reweights the features and identifies the wear stage. In the four-stage wheelset wear task, the method achieves 99.88% test accuracy and 99.713% mean accuracy over ten independent runs. Compared with time–frequency image-based deep models, the classifier reduces forward inference time by about 99.74% and uses only 13,848 parameters. These results demonstrate improved computational efficiency without sacrificing accuracy, supporting real-time deployment in resource-constrained conditions. Validation on the HUST bearing dataset further suggests its applicability to different mechanical diagnostic tasks.
Keywords
1. Introduction
Wheelsets are critical load-bearing and guiding components in rail vehicles, and their condition directly affects operational safety. Long-term wheel–rail interaction may initiate fatigue cracks at the contact interface and lead to severe failures (Qi et al., 2024; Zhang et al., 2025). Current maintenance relies mainly on offline inspection and periodic checks, limiting real-time awareness and early warning. Online monitoring and intelligent diagnosis are therefore needed for in-service safety assurance and predictive maintenance (Zhao et al., 2024).
Existing online inspection techniques follow two main routes: non-acoustic and acoustic. Non-acoustic approaches include laser ultrasonics (Montinaro et al., 2019), axle-box acceleration analysis (Xu et al., 2023), machine vision (Ye et al., 2022), infrared thermography (Firlik et al., 2023), and alternating current field measurement (ACFM) (Nicholson and Davis, 2012). They can be effective in specific settings. However, maintaining high sensitivity and real-time performance in complex operating environments remains challenging. By contrast, acoustic emission (AE) is highly sensitive to dynamic damage and is easy to deploy, which supports continuous in-service monitoring (Kocur et al., 2024). Prior work also links acoustic features to crack evolution in a quantitative manner (Tehranchi et al., 2011). Optimizing the processing window length, bandwidth, and feature extraction strategy can further improve damage identification (Liu et al., 2026; Shen, 2022). Recent studies improve diagnostic performance by fusing multi-source signals (Song et al., 2018) or adopting deep learning models, such as a long short-term memory (LSTM) and visual geometry group (VGG) fusion network (Tang et al., 2025) and improved CNNs. Recent deep learning–based fault diagnosis studies have further focused on interpretable modeling, prior knowledge embedding, multimodal fusion, and noise robustness. For example, the Interpretable and Differentiable STFT cross-machine dual-driven adaptation Network (IDSN) embeds a differentiable STFT layer into the network, allowing time–frequency transform parameters to be adaptively adjusted by gradient descent and enhancing time–frequency interpretability in cross-machine diagnosis (He et al., 2023). The Multi-Wavelet Kernel Convolution Neural Network (MWKCNN) constructs multi-wavelet kernel convolutional layers to introduce signal-processing priors, such as continuous wavelet transform, into feature extraction, thereby improving the capture of impact-related fault features (Jiang et al., 2023). For missing sensors or abnormal data, multimodal imputation and fusion frameworks improve diagnostic reliability through data reconstruction, unified representation learning, and CNN-based classification (Zhang et al., 2025). Multi-sensor and multi-scale attention networks further integrate time-domain, frequency-domain, and cross-sensor information to enhance fault identification under noisy conditions (Ji et al., 2025). However, performance gains often come with higher computational cost and model complexity, limiting real-time deployment under resource constraints. Both one-dimensional sequences and two-dimensional images can serve as classification inputs (Zhang et al., 2023). Yuan et al. (2025) showed that frequency-domain and time–frequency images can improve recognition accuracy and noise robustness. One-dimensional inputs are simpler and usually converge faster with higher inference efficiency, but may be less accurate and robust under strong noise or changing operating conditions (Wang et al., 2025). Two-dimensional inputs require higher-dimensional representations and typically increase parameters, memory use, and inference latency (Lv et al., 2025). Thus, achieving robust, accurate, and low-latency classification under real operating conditions remains an open challenge.
Computational and real-time constraints have increased interest in lightweight modeling and prior-guided feature design. These designs aim to improve diagnostic accuracy while keeping conclusions verifiable. Multi-sensor fusion with lightweight architectures can help balance accuracy and efficiency (Xu et al., 2025). Knowledge distillation offers a similar trade-off (Gong et al., 2023). Signal-processing priors can also be integrated into learning models. This integration reduces computational cost. It can also improve the physical interpretation of features and the traceability of results. Interpretable multiplicative convolutional networks provide one example (Chen et al., 2025). Entropy is increasingly used in this context. It quantifies signal complexity and uncertainty from a nonlinear perspective. It therefore links classical feature engineering to lightweight models. Approximate entropy (Dou et al., 2023), sample entropy (Bai et al., 2024), and permutation entropy (Noman et al., 2024) are widely used. These entropy features can characterize evolving dynamics without high-dimensional inputs. As a result, they offer discriminative yet computation-friendly state representations. This property supports low-dimensional, deployable features for real-time diagnosis in resource-constrained settings.
Nevertheless, entropy-based acoustic diagnosis depends strongly on preprocessing, especially stable modal decomposition. EMD and its variants are widely used for nonstationary signals, but their IMF numbers may vary across samples and they are susceptible to mode mixing and end effects (Li et al., 2017). VMD estimates finite-bandwidth modes under variational constraints and yields a specified number of components, making it more suitable for fixed-size entropy feature matrices. This study therefore proposes a wheelset wear diagnosis framework combining GWO-VMD, multi-domain entropy, and a lightweight attention network. GWO determines the VMD parameters offline, and fixed parameters are then used online for decomposition, entropy extraction, and classification. The contributions are: (1) offline GWO-based optimization of VMD parameters to reduce manual tuning; (2) fusion of ATDE and FDE into a low-dimensional representation of time-domain complexity and frequency-domain energy distribution; and (3) a CBAM-enhanced 1D-CNN for accurate classification under limited computational budgets. In the four-stage task, the method achieves 99.88% accuracy with a model size of tens of kilobytes. The remaining sections describe the method, wheel–rail experiment, HUST validation, and conclusions.
2. Methodology
2.1. Variational Mode Decomposition and parameter optimization
VMD decomposes a signal into finite-bandwidth modes with strong time–frequency concentration. Given a modal number K, it yields the same number of components for different samples, enabling mode-wise ATDE/FDE calculation and fixed-size feature matrices. Since the decomposition quality of VMD is sensitive to the modal number K and the bandwidth penalty factor α (Li et al., 2020), GWO is employed to optimize K and α using the minimum post-decomposition modal entropy as the objective function. (Wang et al., 2025):

2.2. Multi-domain entropy theory
Wheel–rail contact acoustic signals are nonstationary in both time and frequency domains. Crack initiation, spalling, and local adhesion cause transient impacts and amplitude irregularities, whereas wear evolution changes bandwidth, energy migration, and high-frequency components. Therefore, ATDE and FDE are extracted from the IMF components and concatenated along the input-channel dimension. ATDE describes modal time-domain complexity, while FDE describes frequency-domain energy distribution, providing complementary information on temporal evolution and spectral variation. As shown in Figure 1(a), multi-domain entropy features are calculated after GWO-VMD decomposition and then organized as channel-wise concatenated feature inputs for the classifier. The detailed framework proposed for wheel–rail wear condition diagnosis.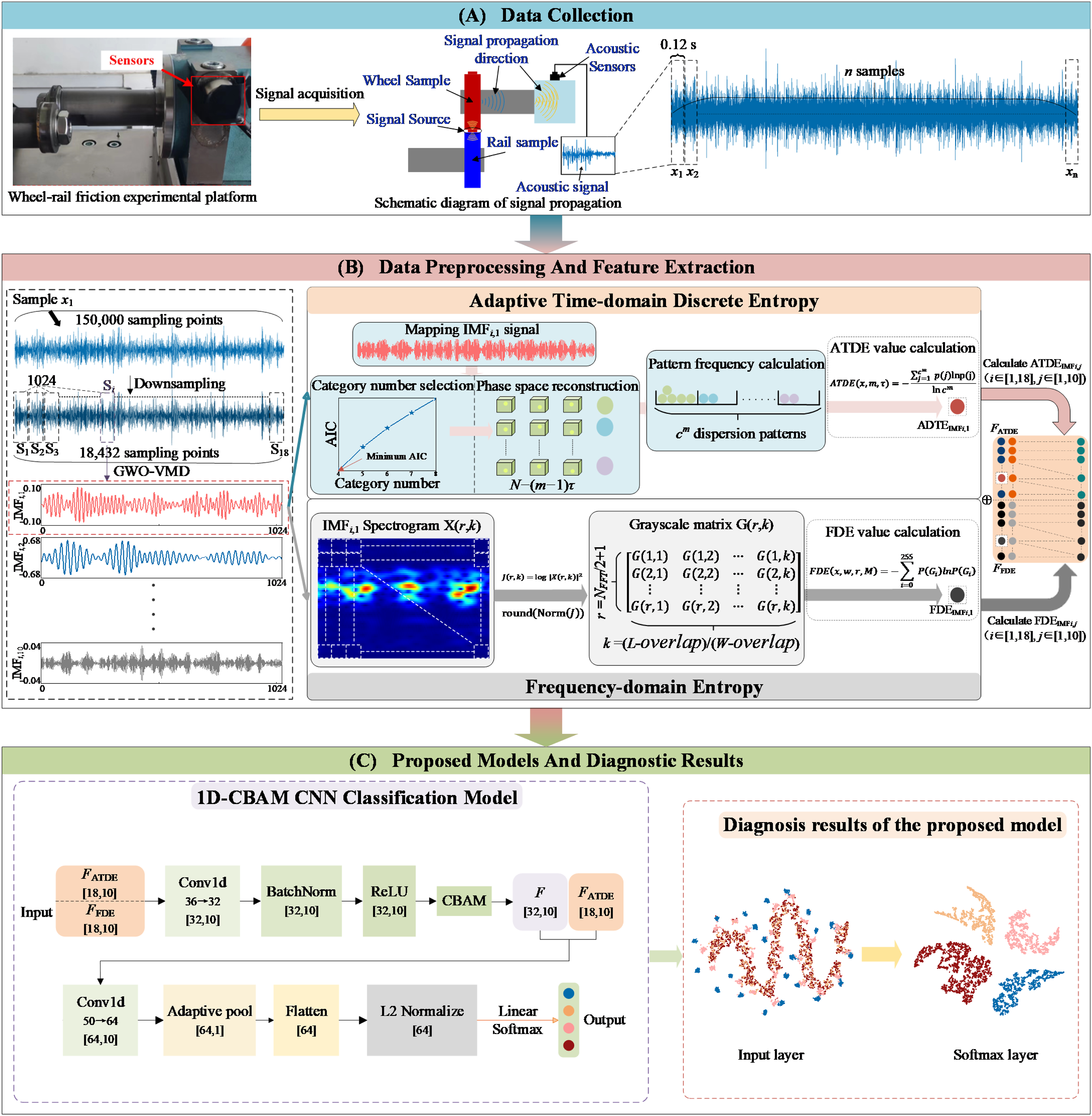
(1) Adaptive Time-domain Discrete Entropy (ATDE)
ATDE is the time-domain part of the multi-domain entropy features. It aims to avoid subjective choices of the discrete class number required by conventional discrete entropy and to improve the robustness of time-domain complexity features (Li et al., 2025). The computation is as follows: Step 1: Given the input time-series signal

Use the skewness s
x
to determine the mapping. If │s
x
│>1, use the logarithmic transform y
i
= log(x
i
– min(x)+1), followed by normalization to [0,1]. Otherwise, map the samples via the Gaussian cumulative distribution function (CDF), y
i
= Ф(x
i
| μ
x
, σ
x
), and then perform linear normalization. Step 2: Following Rostaghi and Azami (2016), set the search space of the class number to [cmin, cmax] = [4,8]. For each candidate class number c, compute the log-likelihood function of y.


We choose the optimal c that yields the minimum AIC. This choice balances model complexity and fit quality, and it adaptively determines the discretization granularity. Step 3: With the optimal c, discretize the mapped signal into a symbolic sequence:

A discrete symbolic sequence of length N is obtained. We then use the embedding dimension m and delay τ to form candidate patterns. The number of all possible patterns is c
m
, which defines the pattern space of length-m symbol sequences. Step 4: A sliding window is applied to the symbolic sequence. The occurrence count of each pattern yields n=(n1, n2, …, n
c
m
). The pattern probability distribution is then computed as

We only retain patterns with nonzero probability for subsequent computation to reduce bias from sparse sampling. Step 5: We compute the discrete entropy and then normalize it to remove scale differences caused by the choice of c and m:

(2) Frequency-Domain Entropy (FDE)
FDE characterizes the complexity of energy distribution in the joint time–frequency domain. It leverages time–frequency variation and grayscale mapping to describe the spectral energy distribution and its changes over time. The computation is as follows: Step 1: For the signal

In this formulation, X(r,k) is the STFT coefficient at time index r and frequency bin k, and w(n-r) denotes the window function. r is the time shift, and M is the FFT length. We use a window length of 128, 50% overlap, and 256-point FFT. The resulting spectrogram-based comparison map J is given by: Step 2: The log-spectral matrix J is normalized to yield Jʹ: Step 3: The normalized matrix Jʹ is mapped to a grayscale matrix G: Step 4: We estimate the probability of each gray level in G. The frequency entropy is then computed as




Here, P(G i ) is the occurrence probability of gray level G i in G.
2.3. 1D-CBAM CNN classification model
CNNs extract hierarchical features through local receptive fields and weight sharing (Sudarshan et al., 2024). In one-dimensional modeling, convolution kernels capture local patterns and progressively transform low-level cues into discriminative representations.
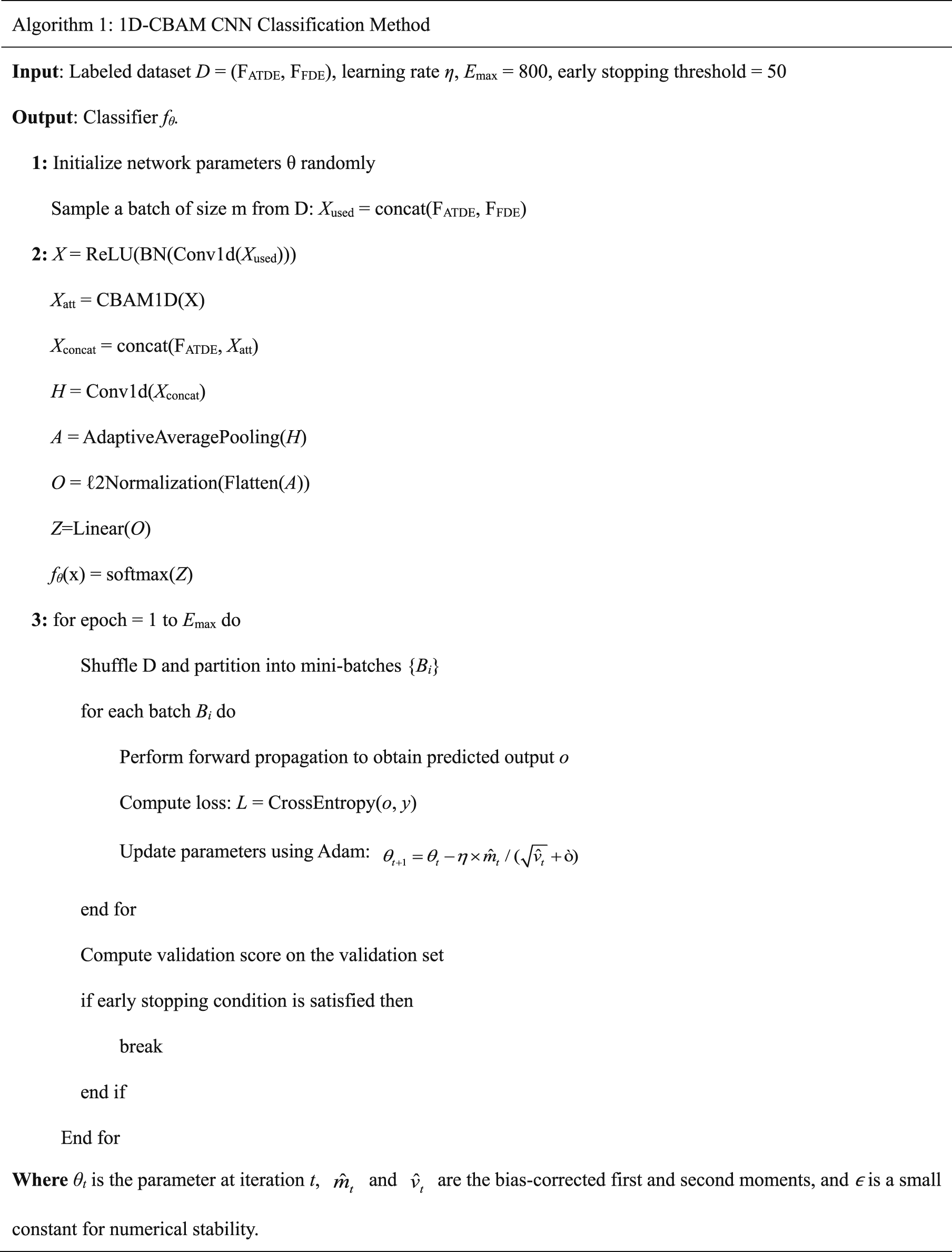
Because wheel–rail acoustic signals are highly nonstationary, simple concatenation may dilute discriminative information. CBAM is embedded into the 1D-CNN to reweight features along channel and temporal dimensions. Figure 1(c) shows the model architecture. ATDE and FDE matrices of size 18 × 10 are concatenated along the channel dimension to preserve IMF-wise correspondence and jointly represent time-domain complexity and frequency-domain energy distribution. The fused features pass through one-dimensional convolution, batch normalization, ReLU activation, and CBAM-based reweighting. Channel attention uses global average and max pooling with a multilayer perceptron to generate channel weights, while spatial attention aggregates channel-wise average and maximum responses through one-dimensional convolution to highlight informative positions. The reweighted features then pass through convolutional layers, adaptive average pooling, flattening, normalization, a fully connected layer, and Softmax for classification. Algorithm 1 gives the pseudocode.
3. Wheel–rail wear-stage diagnosis
3.1. Experiments
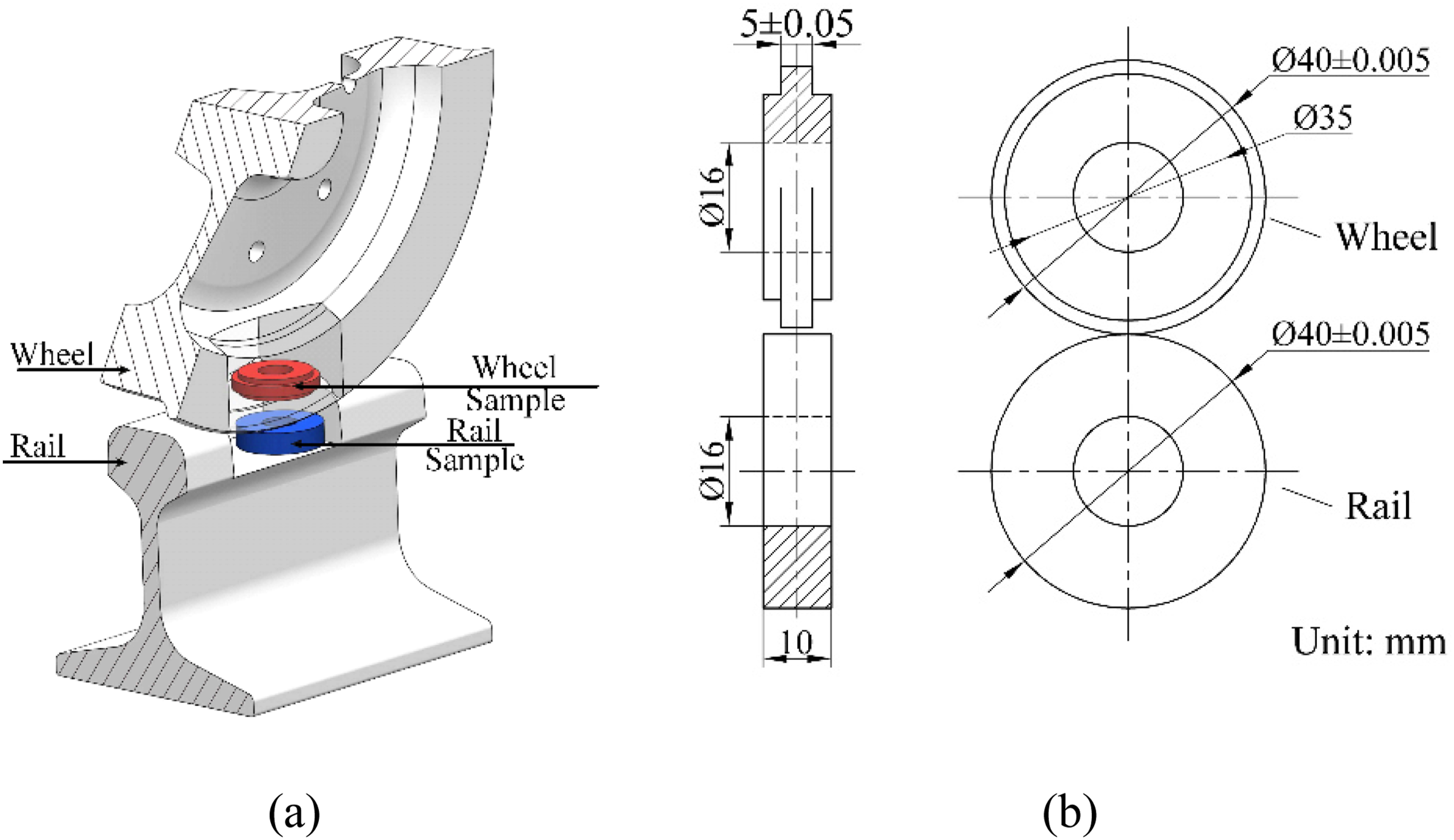
Test data were collected on a wheel–rail tribology rig (Figure 2). The wheel and rail speeds were 515 and 500 r/min, giving 3% longitudinal creepage. Based on Hertzian contact theory, a 20-t axle load corresponds to a maximum contact pressure of 641.6 MPa; the rig load was therefore set to an equivalent 580 N. The specimens were made from a U78CrV rail head and a CL60 wheel rim (Figure 3(a)). They were 40 mm in outer diameter, 16 mm in inner diameter, and 10 mm in width, with a 5 mm contact band (Figure 3(b)). Chemical compositions are listed in Table 1. The rig was pre-run for 5000 cycles. Acoustic signals were acquired using a PXDAQ24260B unit with a PXR15 sensor at 40 dB gain and 1.25 MHz. Wheel–rail friction testing platform. Schematic diagram of specimen preparation: (a) sampling schematic and (b) wheel–rail specimen specifications. Chemical composition of wheel and rail materials.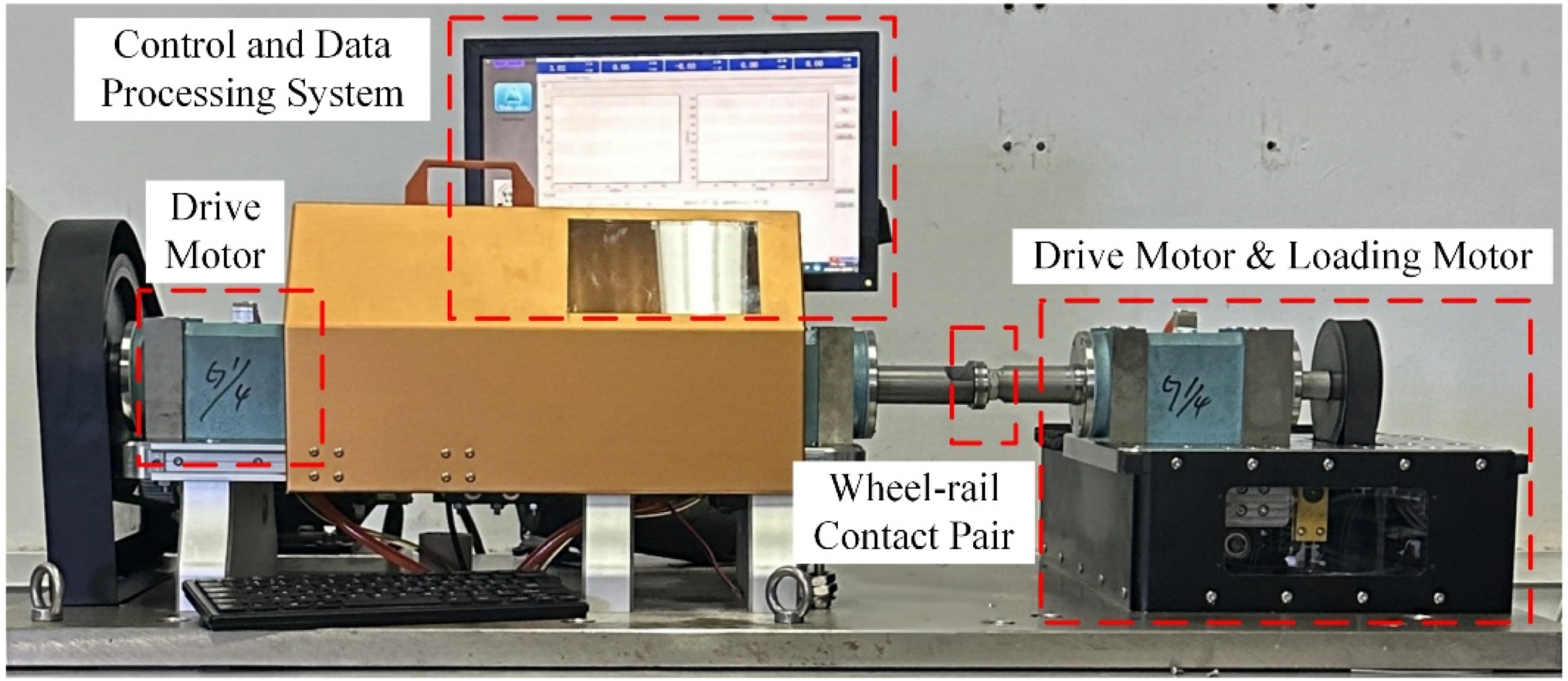

Stage definition and sample distribution.
Online feasibility was assessed using a 3 s diagnostic update interval. GWO parameter search was performed offline; online diagnosis used fixed K and α for VMD and ATDE/FDE extraction. The average runtimes for VMD and entropy calculation were 0.27741 s and 0.2493 s per sample, respectively, giving 0.52671 s in total. This is below the update interval, indicating feasible online feature processing.
3.2. Wheel–rail contact acoustic signals and microscopic damage feature analysis
Figure 4 compares signals from different wear stages using energy, RMS, and CWT time–frequency maps. In Stage #1, low energy and RMS values and a concentrated CWT frequency distribution correspond to slight wear. In Stage #2, increased energy and RMS values and a broadened CWT frequency range indicate aggravated wear. In Stage #3, energy and RMS reach their maxima, and the CWT energy spreads over multiple frequency bands, suggesting severe wear. In Stage #4, energy, RMS, and CWT intensity decrease, indicating a transition toward stable wear. These results show that the selected indicators capture the stage-dependent evolution of signal characteristics. Microscopic damage evolution changes the local impact and friction states at the wheel–rail contact interface, affecting acoustic signal complexity and the corresponding multi-domain entropy features. For the selected representative samples, the mean ATDE values are higher in Stage #1 and Stage #3, at 0.7078 and 0.6688, respectively, but lower in Stage #2 and Stage #4, at 0.5803 and 0.5795. The larger ATDE standard deviations in Stage #2 and Stage #4, 0.2160 and 0.2237, indicate greater differences in time-domain complexity across temporal segments and IMF modes. The mean FDE values vary slightly from 4.9024 to 4.9568, complementing the characterization of inter-modal differences in frequency-domain energy distribution. Thus, multi-domain entropy features indirectly reflect the stage-wise evolution of wear damage through acoustic signal complexity and frequency-domain energy distribution. Analysis of wheel–rail contact acoustic signals.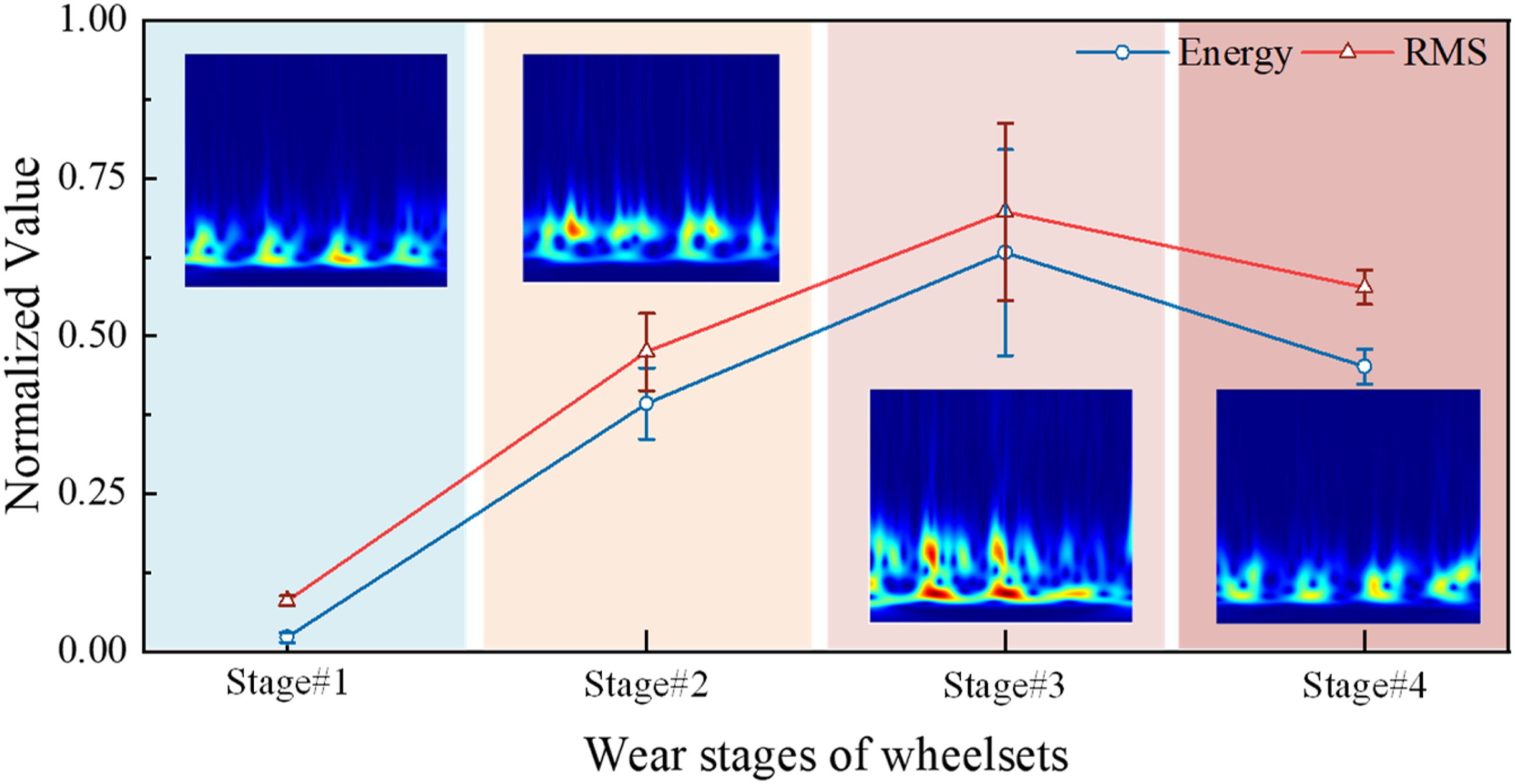
Figure 5 shows optical micrographs of wheel cross-sectional damage and the corresponding plastic deformation morphologies at different cycle intervals. N1–N4 correspond to 5 × 104, 10 × 104, 16 × 104, and 21 × 104 cycles, respectively. At N1 node, fatigue cracks appear and propagate obliquely into the substrate. At N2 node, the crack angle and depth increase, and tangential loading induces a plastically deformed surface layer. Cracks then extend inward along the plastic flow lines. At N3 node, crack density increases, surface spalling becomes evident, and the plastic layer thickens by about 6.2 µm with increased roughness. At N4 node, a complex crack network and local spalling are observed. In some regions, changes in plastic flow direction alter the crack propagation angle, while the plastic layer thickness becomes relatively stable (Cvetkovski et al., 2014). Wheel cross-sectional damage evolution showing paired optical microscopy (OM) images and plastic deformation layers at different cycle nodes: (a) N1, (b) N2, (c) N3, and (d) N4.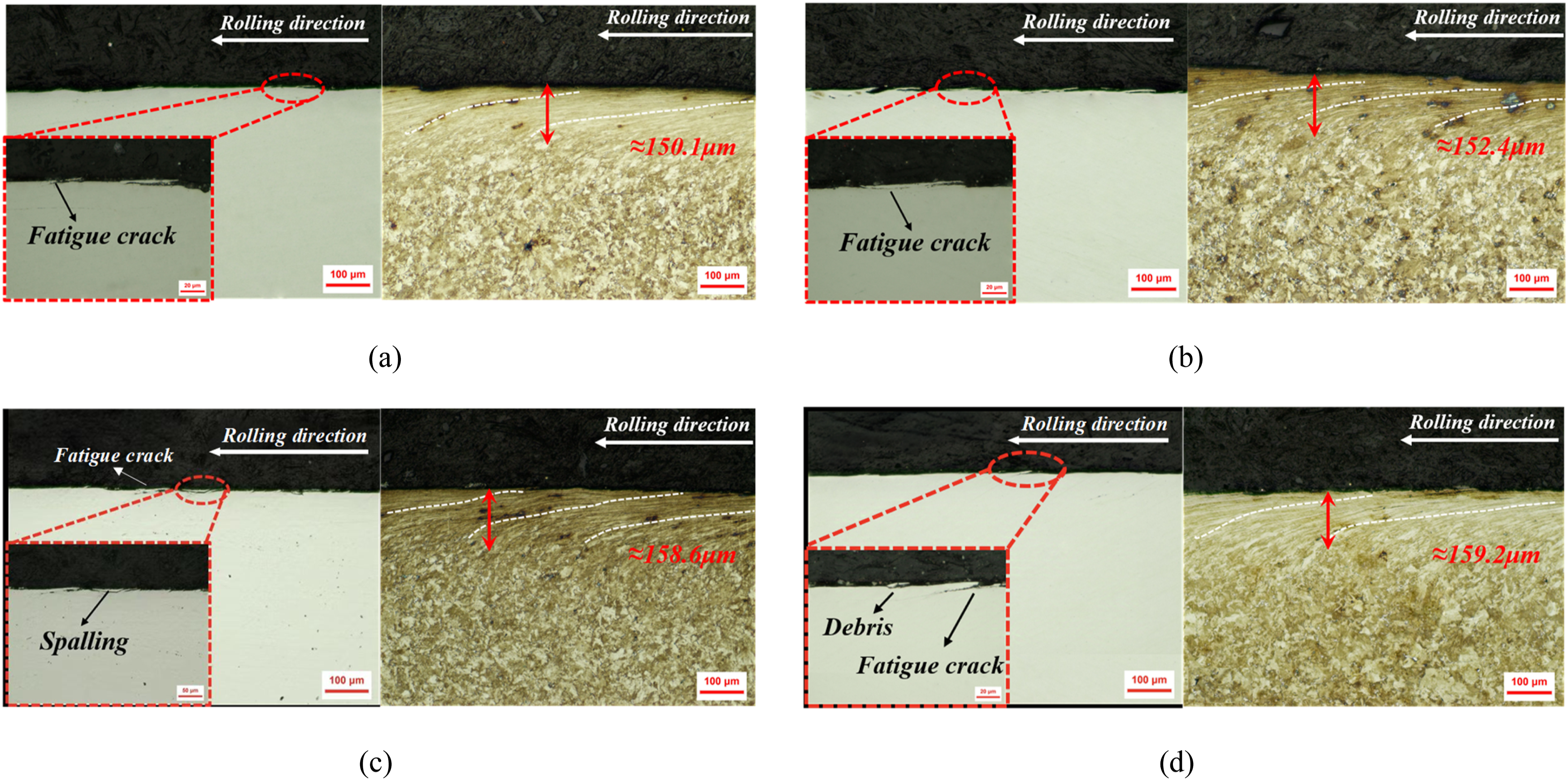
Figure 6 shows optical micrographs of rail cross-sectional damage and the corresponding plastic deformation morphologies at different cycle numbers. At N1 node, cracks begin to propagate along the rolling direction. At N2 node, plastic flow lines extend inward, but the cracks remain limited and the plastic layer changes only slightly. At N3 node, crack density increases, multilayer cracks appear, and fatigue cracks further extend into the subsurface layer, with a 3.1 µm change in the plastic deformation layer. At N4 node, crack number decreases, the flow lines become nearly parallel to the surface, and crack propagation also tends to be parallel, indicating a more stable wear state. A lower stress level may suppress further crack growth. Rail cross-sectional damage evolution showing paired optical microscopy (OM) images and plastic deformation layers at different cycle nodes: (a) N1, (b) N2, (c) N3, and (d) N4.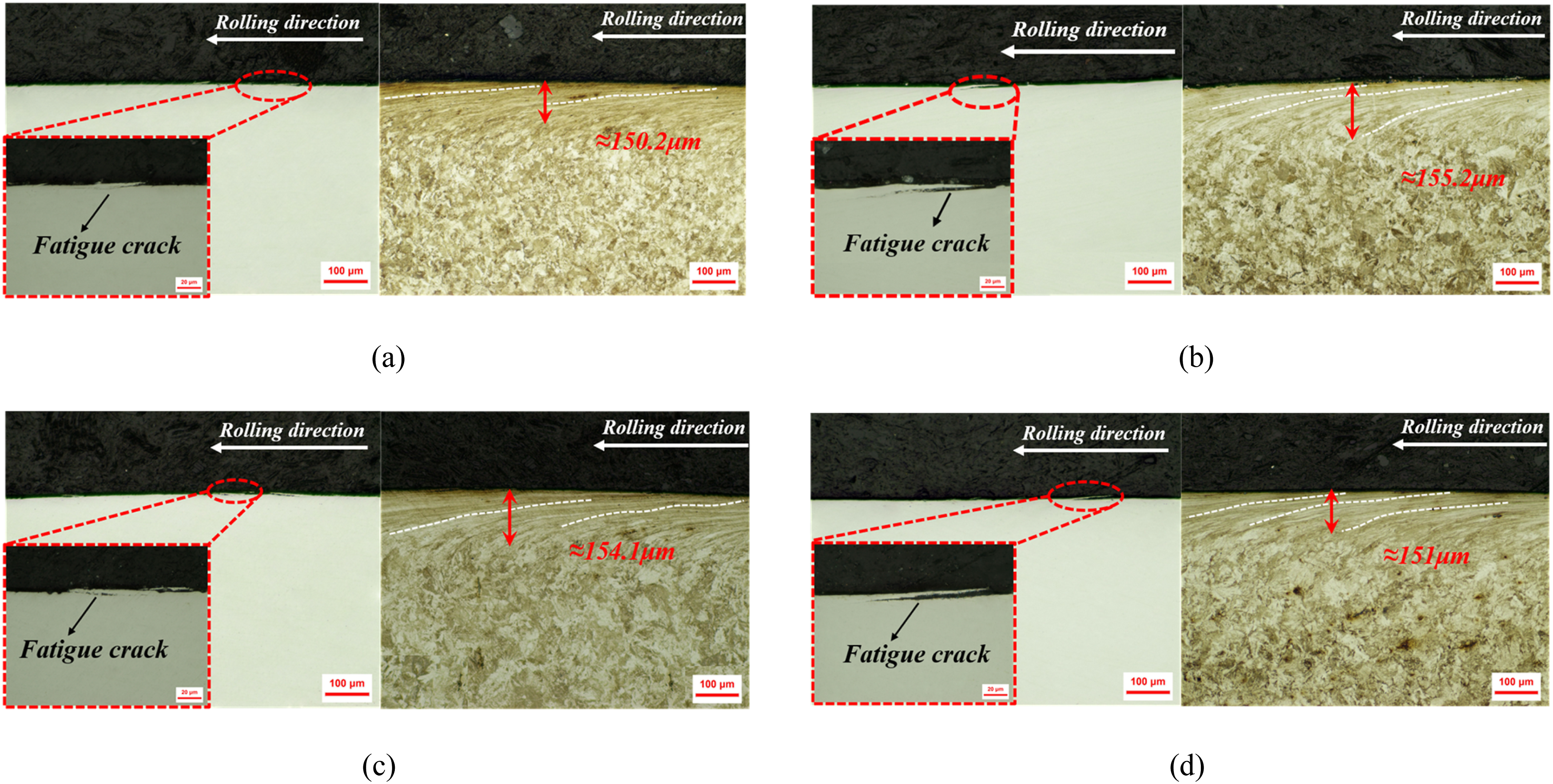
Figure 7 presents the three-dimensional surface morphologies of the wheel and rail at different cycle stages. For the wheel, large spalling pits are observed at N1 node. At N3 node, the pit size exceeds 100 µm and the depth exceeds 15 µm. At N4 node, the pit area and depth decrease, and the surface becomes smoother. For the rail, a spalling pit appears at N2 node, with a width of about 100 µm and a depth of about 4 µm. At N3 node, the pit area decreases while the depth remains nearly unchanged. At N4, the surface becomes smoother and spalling pits occur much less frequently. Figure 8 shows the evolution of areal roughness Sa, which is consistent with the wear process (Benoit et al., 2016). For the wheel, Sa is lowest at N1 node, at 1.954 µm, reaches 2.802 µm at N3 node, and then decreases to 2.34 µm in the steady wear stage. For the rail, Sa increases from 0.53 µm at N1 node to 0.998 µm at N3 node, and then decreases to 0.698 µm. This trend suggests that wear becomes dominant, whereas the contribution of crack propagation weakens. Three-dimensional surface topographies of worn wheel (left) and rail (right) surfaces at different cycle nodes: (a) N1, (b) N2, (c) N3, and (d) N4. Surface roughness of the wheel and rail specimens plotted with different wear cycles.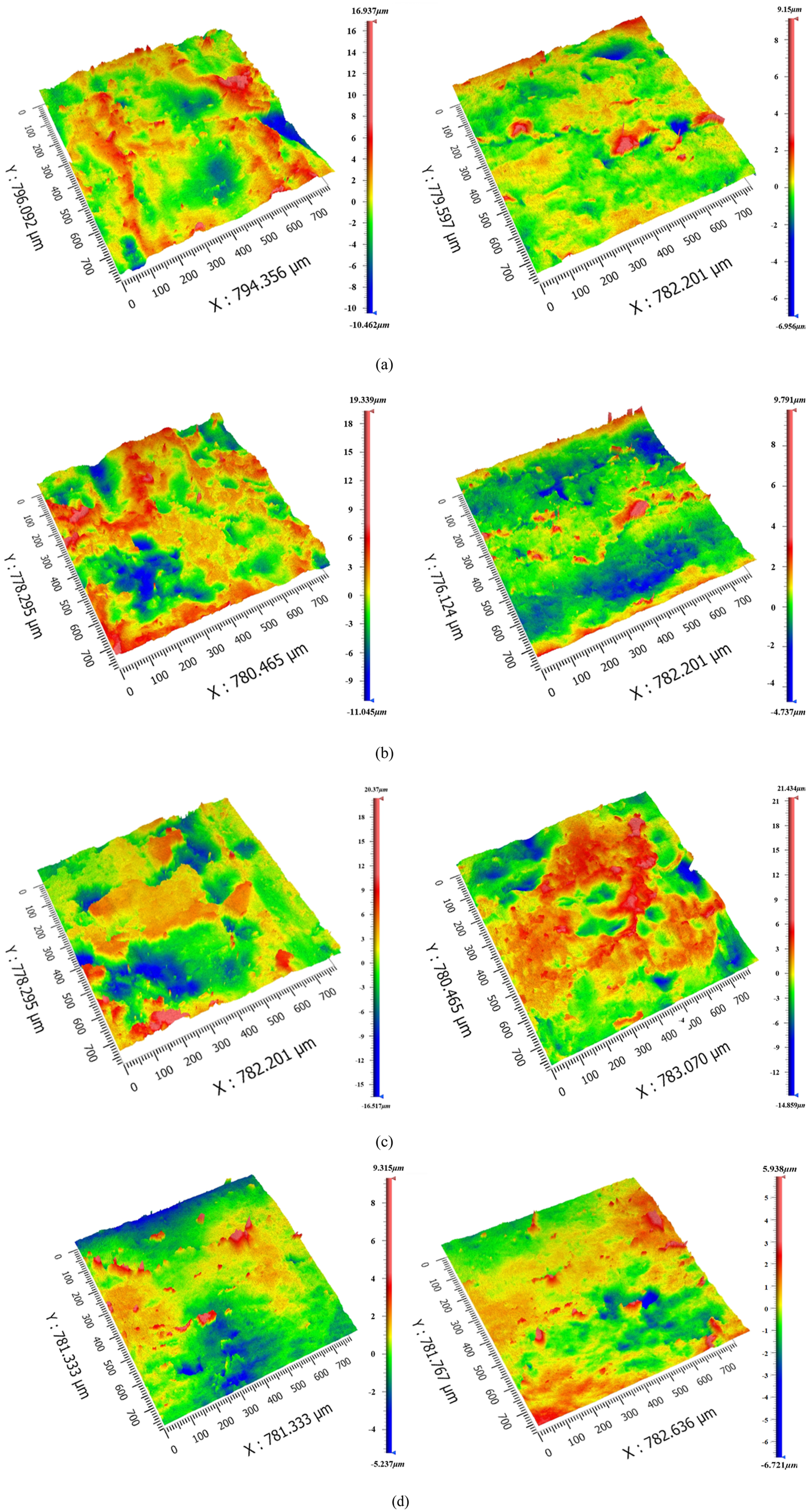
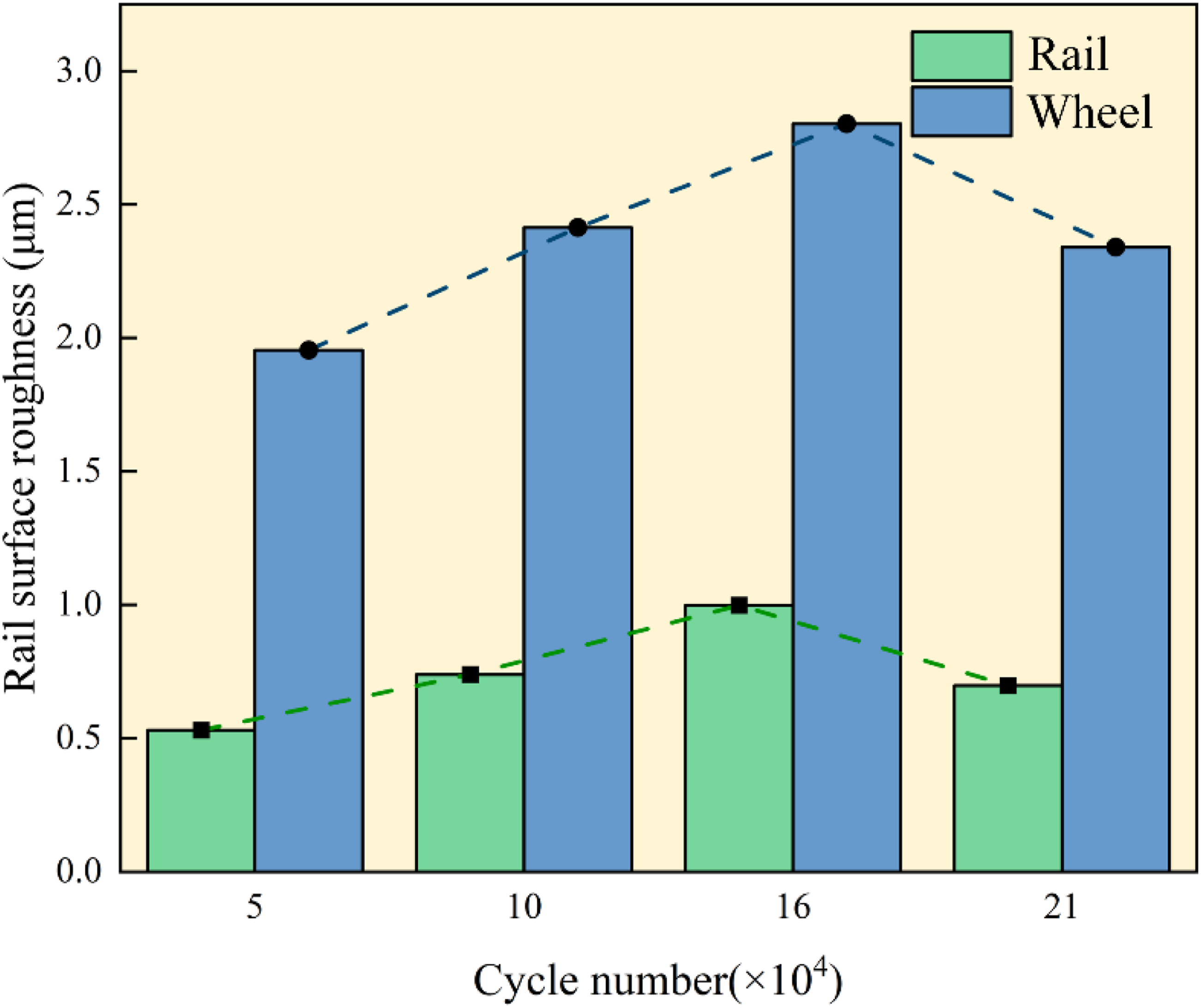
Figure 9 summarizes the SEM observations of stage-wise damage evolution in the wheel and rail. For the wheel, adhesive wear dominates at N1 node, with block-like wear debris. At N2 node, adhesion weakens and microcracks appear on a relatively smooth surface. At N3 node, cracks become more evident, and large, deep spalling pits form, consistent with fatigue damage accumulation. At N4 node, crack number decreases and the surface becomes flatter. Severe wear may suppress further crack initiation, making wear the dominant mechanism. For the rail, cracks are limited at N1 node, with only slight local spalling. At N2 node, crack density increases, and larger but shallow spalling pits appear. At N3 node, rapid crack propagation is accompanied by aggravated damage. At N4 node, crack number decreases, spalling disappears, and the surface becomes relatively flat. Severe wear may suppress further crack propagation (Hu et al., 2021). SEM images of worn wheel (left) and rail (right) surfaces at different cycle nodes: (a) N1, (b) N2, (c) N3, and (d) N4.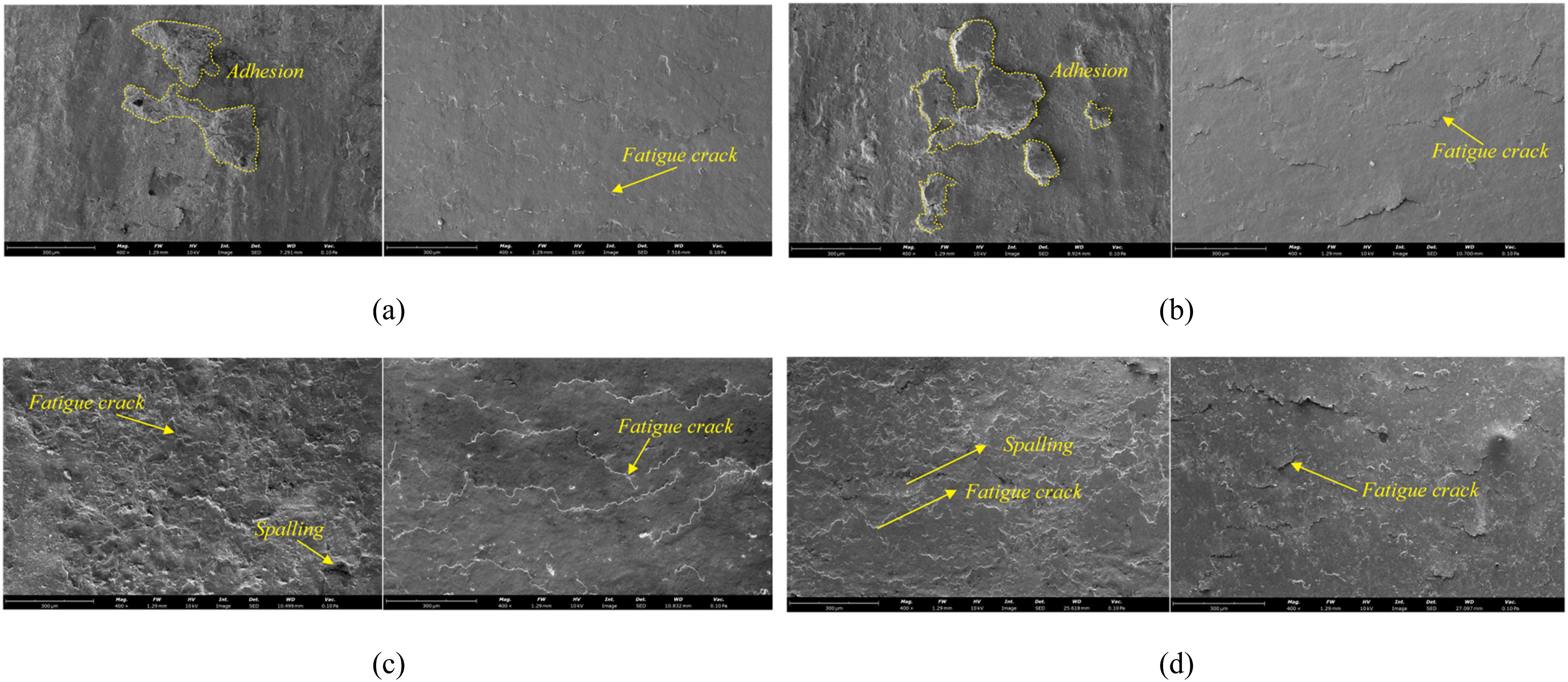
3.3. Fault diagnosis and performance assessment
Experiments were implemented in PyTorch 1.13 with Python 3.9 on an Intel(R) Core(TM) i7-14700KF CPU (3.40 GHz). Training was capped at 800 epochs with early stopping after 50 epochs without validation improvement; the best checkpoint was used for testing. Grid search was conducted for learning rate {10–3, 10–4, 10–5} and batch size {64, 128, 256}, and the best configuration was used.
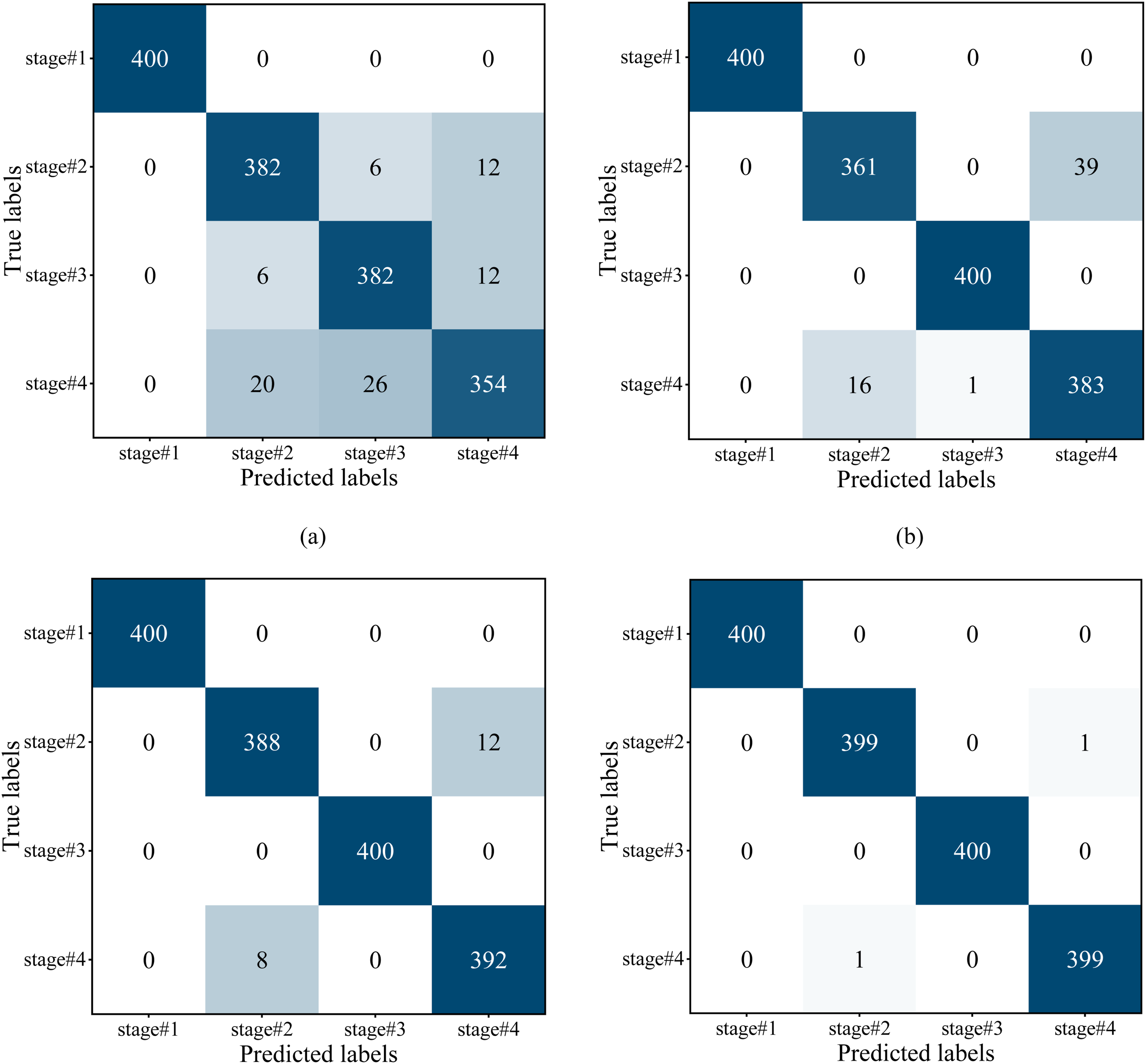
Ablation experiments evaluated the contributions of ATDE, FDE, and CBAM by removing each module individually. Figure 10 reports accuracies under 6:2:2, 8:1:1, and 7:2:1 splits, with models denoted as w/o ATDE, w/o FDE, w/o CBAM, and Full model. Figure 11 presents the confusion matrix for the 6:2:2 split. The Full model achieves 99.88% test accuracy and distinguishes the four stages effectively. Stage #1 and Stage #3 are classified with 100% accuracy, while only one sample is confused between Stage #2 and Stage #4, consistent with their similar damage morphology and signal features. Overall, ATDE, FDE, and CBAM all improve performance, with ATDE contributing most and CBAM further enhancing discriminative feature responses. Results of the ablation experiment. Confusion matrix for the ablation experiment on the Wheel–Rail Friction Dataset: (a) w/o ATDE, (b) w/o FDE, (c) w/o CBAM, and (d) Full model.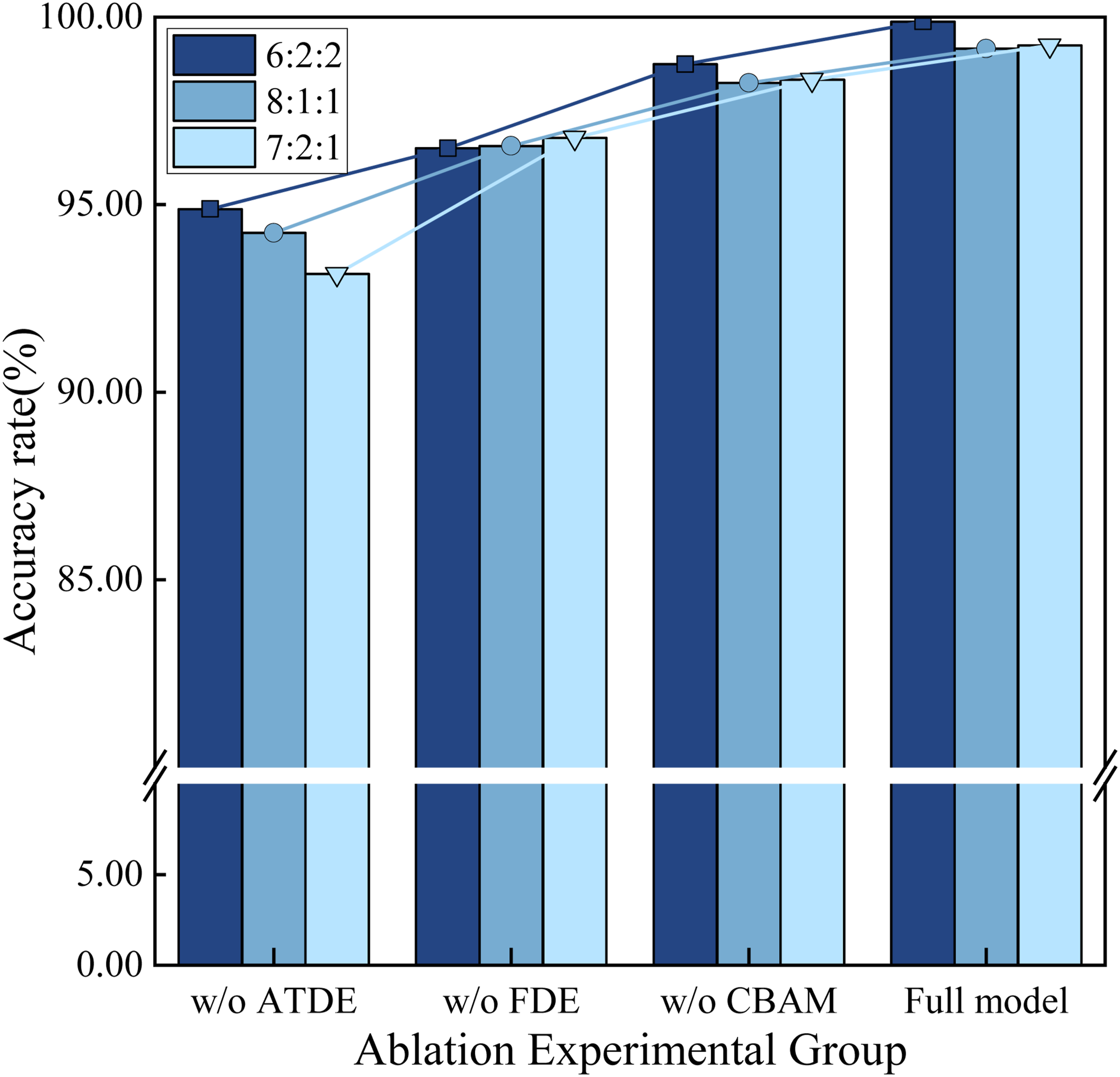
t-SNE was used to visualize feature evolution across network layers. In Figure 12, each point denotes a test sample, and colors indicate wear stages. From the input layer to the pre-classification space, intra-class samples become more compact, inter-class overlap decreases, and class boundaries become clearer, indicating progressively enhanced feature representation. t-SNE visualization of feature-space distributions at different model stages.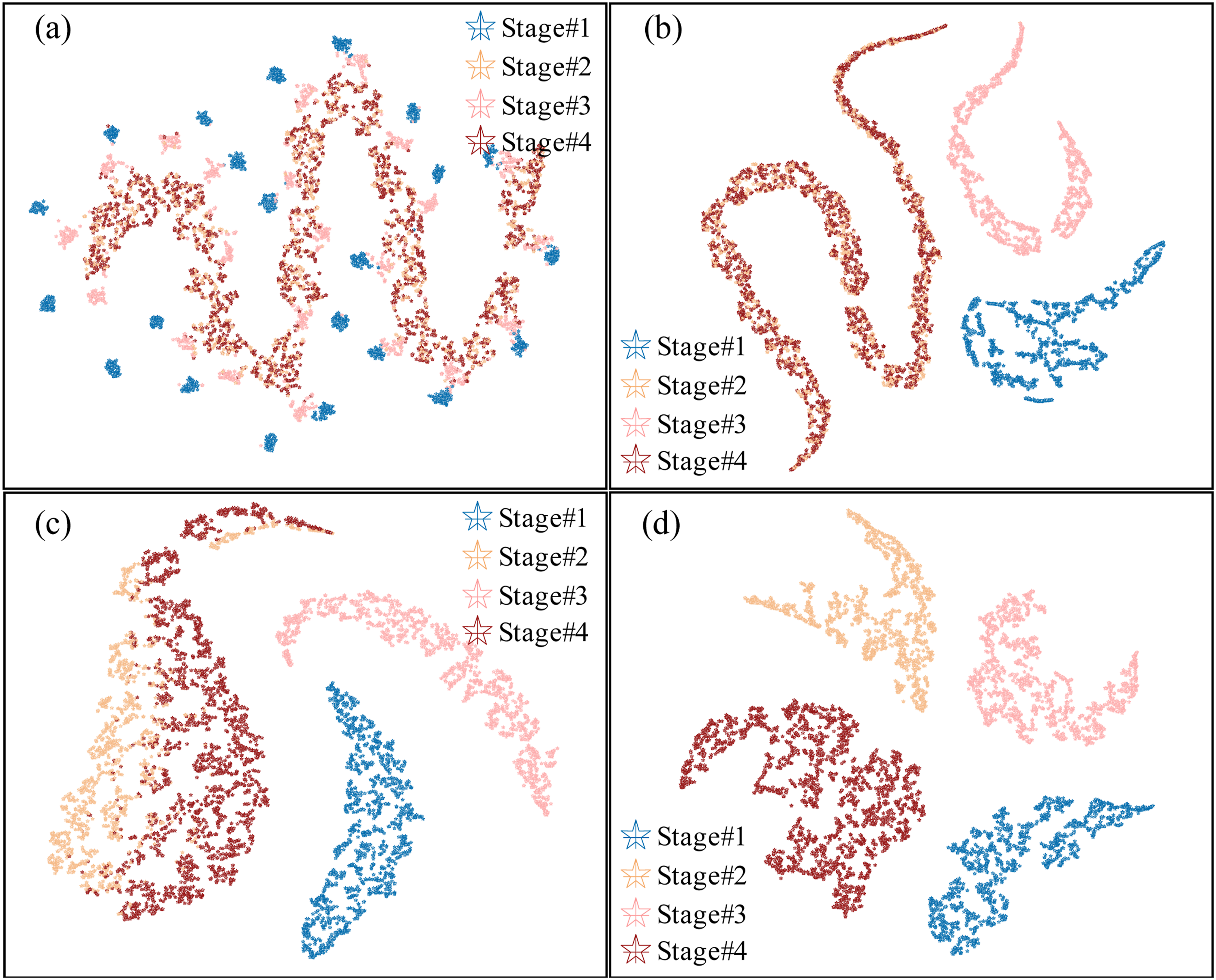
Ten-run classification performance on the wheel–rail and HUST bearing datasets.
White noise was added at SNRs of 0, 5, and 10 dB to evaluate robustness. As shown in Figure 13, all models improve as SNR increases. The proposed model reaches 93.686%, 95.975%, and 97.863% mean accuracy at 0, 5, and 10 dB, outperforming both baselines and maintaining over 93% accuracy even at 0 dB. This indicates stronger discriminative stability under noise. Noise robustness comparison under different SNR levels on the Wheel–Rail Friction dataset.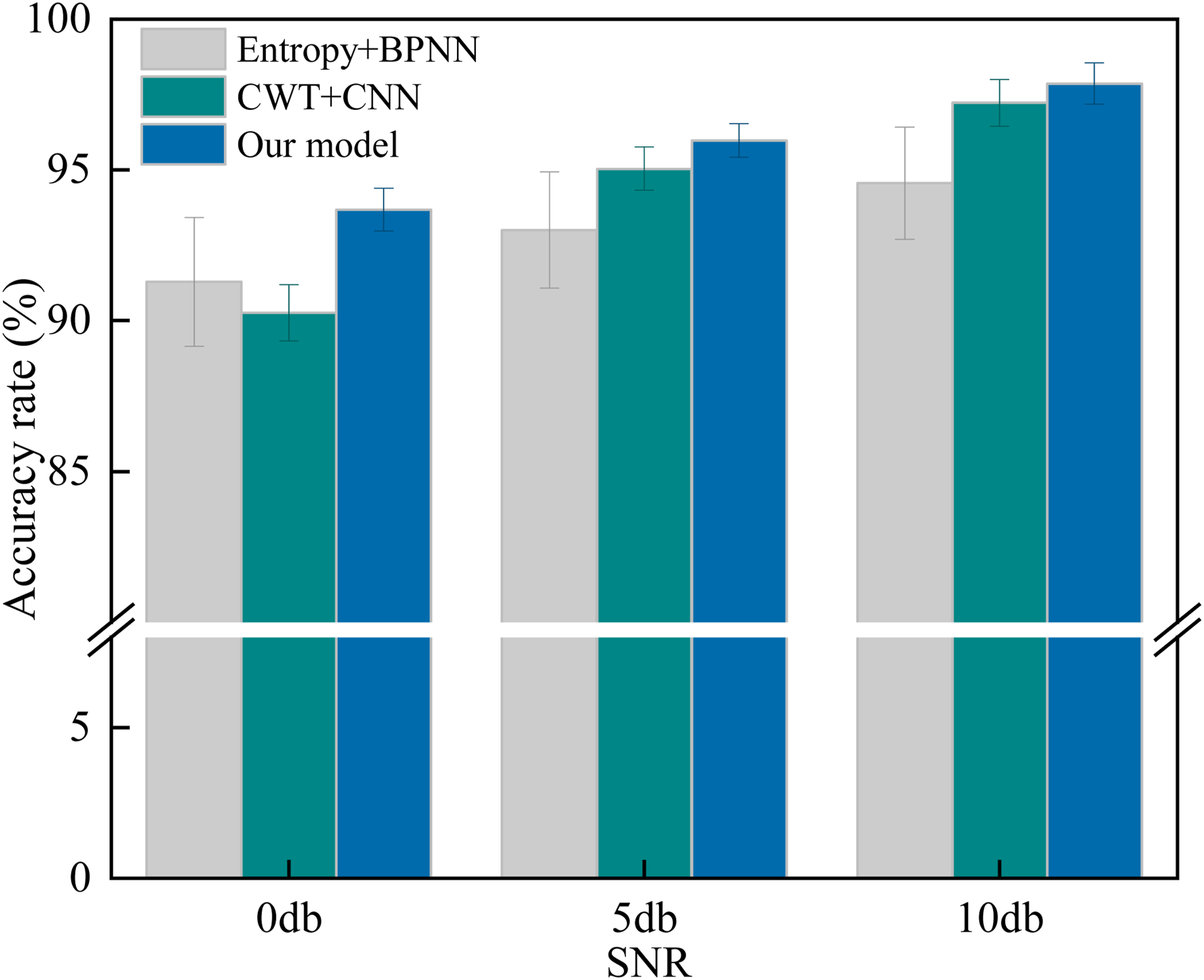
Model complexity and performance comparison on two datasets.
From an engineering application perspective, the proposed method can support periodic online monitoring in a cloud–edge collaborative mode. VMD decomposition, ATDE/FDE feature extraction, and lightweight CNN analysis are performed on the cloud side, while the edge side receives diagnostic results for alarm triggering or data logging. The results show that the proposed method balances recognition accuracy, model overhead, and deployment cost, making it suitable for wheel–rail wear-state recognition under resource constraints.
4. Validation on the HUST bearing dataset
To assess the applicability of the proposed method beyond the wheel–rail wear dataset, cross-dataset validation was conducted using the public HUST bearing dataset from Huazhong University of Science and Technology. This test evaluates model consistency across different mechanical components and data sources.
4.1. Experimental data description
Five bearing conditions under the 20 Hz operating condition were selected: Normal, M-Ball, M-Comb, M-Inner, and M-Outer. The sampling frequency was 25.6 kHz (Zhao et al., 2024). For fair comparison, vibration signals from the same measurement direction were used. Each condition contained 100 samples, with 2048 points per sample. Feature construction and model training followed the same procedure as that used for the wheel–rail wear dataset.
4.2. Model training and fault diagnosis
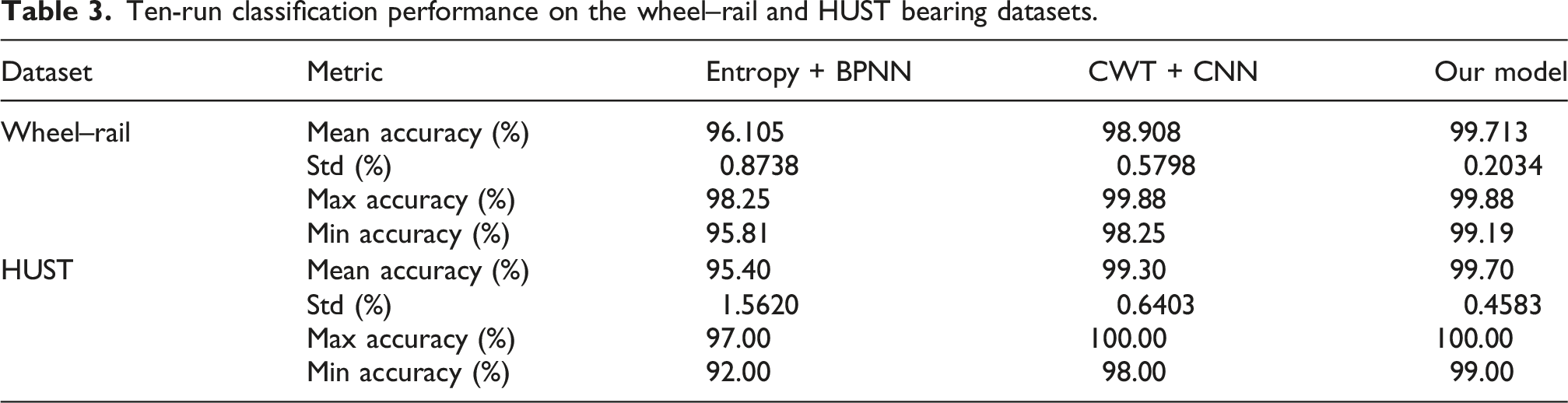
Figure 14 shows the HUST ablation results. The Full model performs best under all data splits, reaching 100% for 6:2:2 and 8:1:1 and 98% for 7:2:1. Removing ATDE causes the largest decrease, confirming the dominant role of time-domain complexity. Removing FDE also degrades accuracy, while removing CBAM causes a slight decrease, indicating the benefit of attention-based reweighting. Table 3 gives the 10-run results of the three models on the HUST dataset. The proposed model obtains the highest mean accuracy of 99.70%, the lowest standard deviation of 0.4583%, and a minimum accuracy of 99.00%, compared with 99.30% for CWT + CNN and 95.40% for Entropy + BPNN. These results demonstrate high accuracy and stable repeated-run performance under noise-free conditions. Ablation experiment results on the HUST bearing dataset.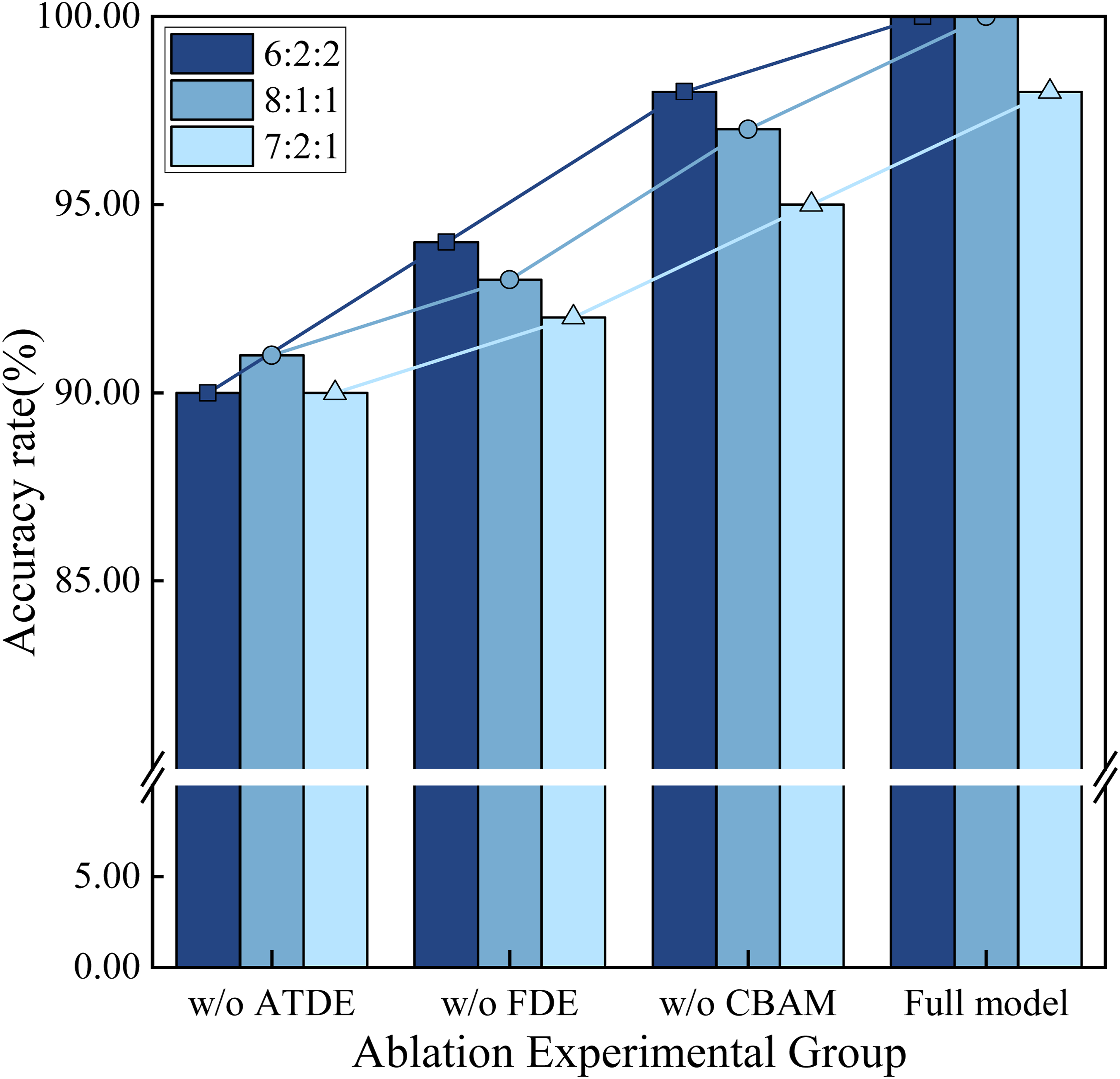
Figure 15 shows the noise robustness results under different SNRs. As the SNR increases from 0 dB to 10 dB, all models show an overall improvement in accuracy. The proposed model achieves the highest or comparable accuracy across noise levels with smaller fluctuations, suggesting that the multi-domain entropy features and attention mechanism maintain strong discriminative ability under noise disturbance. Noise robustness comparison under different SNR levels on the HUST bearing dataset.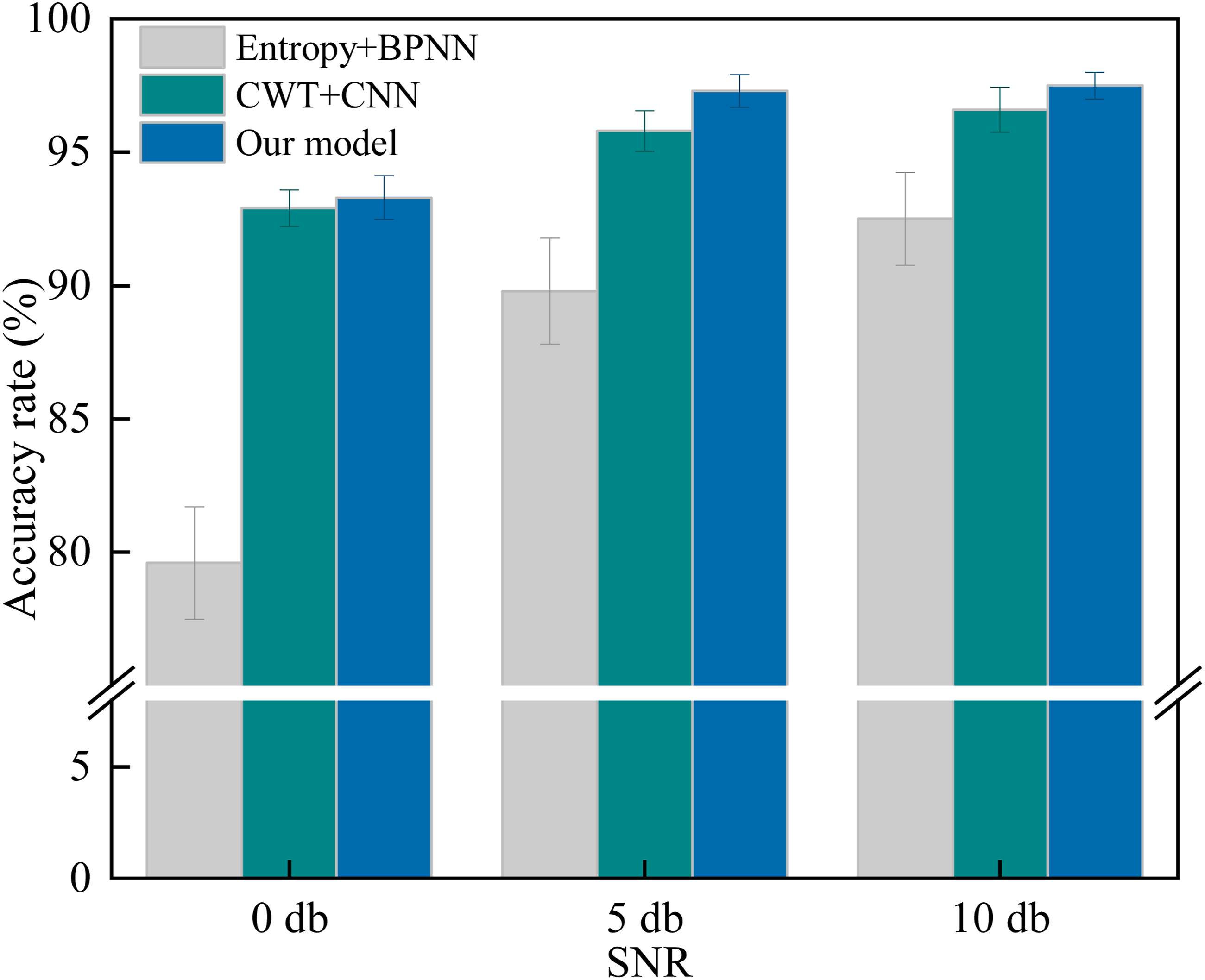
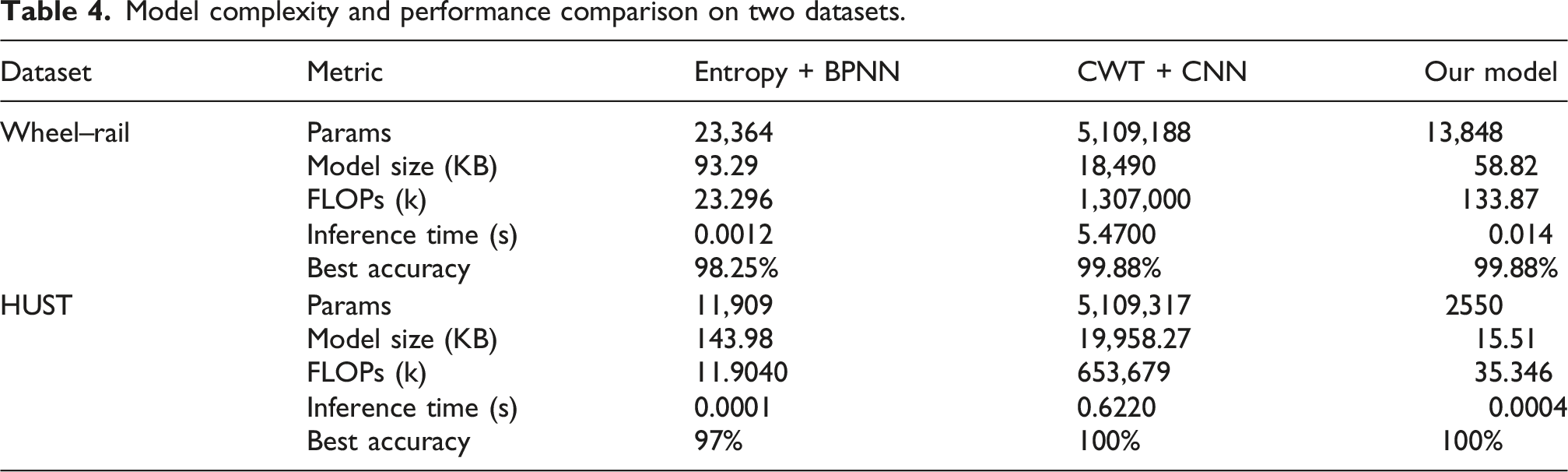
Table 4 further compares model complexity and performance. The proposed model uses only 2550 parameters and has a size of 15.51 KB, both lower than those of the two baselines. Its FLOPs are 35.346 k, higher than Entropy + BPNN but much lower than CWT + CNN. Its inference time is 0.0004 s, slightly higher than Entropy + BPNN but far lower than CWT + CNN at 0.6220 s. Overall, the proposed model provides high diagnostic stability and low model overhead on the HUST dataset.
5. Conclusion
This study develops a diagnostic framework for heavy-haul railway wheel–rail contact friction-state recognition by integrating GWO-VMD, multi-domain entropy features, and an attention-enhanced lightweight network. The main conclusions are as follows. (1) A signal representation procedure combining offline parameter optimization and online feature extraction is established. GWO determines the VMD parameters offline, while fixed parameters are used online for wheel–rail acoustic signal decomposition and ATDE/FDE feature extraction. ATDE describes time-domain complexity, and FDE describes frequency-domain energy distribution. The CBAM-enhanced lightweight 1D-CNN enables adaptive feature weighting and fast classification. (2) On the wheel–rail dataset, the proposed method achieves a favorable balance among accuracy, stability, and model overhead. It reaches 99.88% test accuracy in the four-stage wear classification task and maintains high performance under different SNRs, indicating good stability and noise robustness. Compared with time–frequency image-based models, the classifier reduces forward inference time by about 99.74% while maintaining 99.88% accuracy, with only 13,848 parameters. These results support low-latency wheel–rail wear classification under resource constraints. (3) Validation on the public HUST bearing dataset further suggests applicability to different mechanical diagnostic tasks. In the five-class task, the method achieves 99.70% mean accuracy over ten runs, a maximum accuracy of 100%, a model size of 15.51 KB, and a classifier forward inference time of 0.0004 s. Overall, the method offers a low-overhead solution for periodic wheel–rail wear-state monitoring, although further validation under more complex load, speed, and environmental conditions is required.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No 52567002 and 62571424) and the Ganpo Juncai Support Program, Jiangxi (Grant No 20243BCE51071).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
Mingxue Shen will handle all correspondence at all stages of refereeing, publication, and post-publication. The corresponding author is responsible for any future queries related to the methodology, data, and results of this study. The provided email address is valid and will be kept up to date throughout the process.