
Abstract
Human-machine shared steering control (SSC) has emerged as a focal area of research due to its advantages in improving driving safety and reducing driver workload. However, coordinating behaviors between the human driver and the automatic controller remains a crucial challenge when human-machine conflicts (HMC) arise. To address this challenge, a game-theoretic adaptive human-machine SSC method considering safety-assured HMC resolution is researched in this paper. Firstly, the dynamic interaction model between the human driver and the automatic controller is built using Distributed Model Predictive Control (DMPC). Notably, the automatic controller anticipates and actively accommodates the driver’s potential behaviors in this interaction model. Subsequently, the Nash equilibrium between the human driver and the automatic controller is solved to coordinate their interactive behaviors. Secondly, to ensure driving safety, a driving authority allocation strategy is provided via Potential Field Model Predictive Control (PF-MPC). On that basis, the risk potential field of the driving environment is incorporated into the cost function of PF-MPC, thereby optimizing the allocation of driving authority. Finally, the driver-in-the-loop experiments are carried out to compare the proposed method with the latest SSC techniques. The experimental results demonstrate that the proposed approach not only significantly reduces HMC, but also alleviates the driver’s physical and mental workload while enhancing driving safety and stability.
Keywords
1. Introduction
Human-machine shared driving has been regarded as an important transitional paradigm toward fully autonomous driving, which enabling the human driver and the automatic controller to jointly operate the vehicle within a shared control loop (Hua et al., 2025; Xu et al., 2026). By combining the driver’s decision-making capability in complex scenarios with the controller’s precise control performance (Huang et al., 2025), shared driving has shown great potential for improving driving safety and stability (Xu et al., 2024).
As a key component of human-machine shared driving, shared steering control (SSC) has been widely studied to improve the lateral safety and stability of intelligent vehicles Xu et al. (2023). However, human-machine conflict (HMC) remains a major challenge, especially in parallel SSC systems where the human driver and the automatic controller act independently Xu et al. (2025b). HMC may arise when the driving characteristics or intentions of the human driver and the automatic controller are inconsistent Tang et al. (2025); Guan et al. (2025). Such conflicts not only degrade the driving experience of the human driver but also increase the risk of vehicle instability and collisions Li et al. (2024b).
To resolve HMC, some scholars have sought to align the automatic controller more closely with human driver behavior by modelling the interactive behavior between the two sides Zhang et al. (2025a). Additionally, previous research has demonstrated that the human-machine interaction model in SSC scenarios can be formulated as a dynamic game problem (Ding et al., (2025). Consequently, many researchers have applied game theory to SSC in the last few years Feng et al. (2023); Xie et al. (2023).
Na and Cole developed several game-theoretic human-machine interaction models for SSC, including non-cooperative Nash, Stackelberg, and cooperative Pareto frameworks (Na and Cole 2020, 2019). These studies provide valuable insights into game-based SSC. Furthermore, Guo et al. (2024b) developed a game-based human-machine SSC strategy to improve driving safety by incorporating vehicle dynamics under extreme conditions into the human-machine interaction model. Similarly, Liu et al. (2024) proposed a game-based human-machine SSC strategy in which nonlinear vehicle dynamics and the driver’s neuromuscular delay were considered to better characterize human-machine interaction. However, in these models, both the driver and controller mainly minimize their own path-tracking errors (Zhang et al., 2024), while the controller’s proactive adaptation to the driver under increasing HMC remains insufficient (Liang et al., 2023). To address this limitation, this paper proposes a game-theoretic SSC strategy in which the controller adapts to the driver’s behavior according to HMC, and the interaction between both agents is coordinated by solving the Nash equilibrium.
However, to mitigate HMC and ensure driving safety, mere coordination of control behaviors is insufficient. A dynamic strategy for allocating driving authority is also necessary. Consequently, in the context of game-theoretic SSC strategies, numerous researchers have designed authority allocation strategies based on driving risk. For instance, an authority allocation strategy is designed in Li et al. (2024a) based on environmental risk, assessed using time-to-collision. Li et al. (2019) proposed a game-theoretic human-machine SSC method based on an elliptical-field-based authority allocation strategy. In this approach, vehicle control is primarily entrusted to the human driver during high-risk driving conditions.
In contrast, Chen et al. (2025) proposed a numerical-function-based authority allocation strategy that accounts for both lateral and longitudinal risks. In this strategy, the automatic controller is allowed to take greater control authority as the driving risk increases. Similarly, Guo et al. (2024a) developed a fuzzy-control-based authority allocation strategy based on risk assessment, where the primary control authority is assigned to the automatic controller under hazardous driving conditions. However, the control authority assigned to either party, especially in high-risk situations, may exacerbate driving risks. To address this issue, an authority allocation strategy based on potential field model predictive control (PF-MPC) is proposed, considering the driving risk potential field of the environment in this study. And the authority is allocated adaptively based on the driver’s and the automatic controller’s actions, ensuring the vehicle is at the position with the lowest risk gradient.
The main contributions of this study are as follows: (1) A game-theoretic human-machine SSC strategy is proposed with a novel human-machine interaction model. In contrast to traditional human-machine interaction models that focus primarily on path tracking, the automatic controller’s interactive behavior is designed to focus on trajectory tracking when HMC is relatively low, while actively adapting to the driver’s potential behavior when HMC increases. Ultimately, the interaction between the human driver and the automatic controller is coordinated by solving for the Nash equilibrium. (2) An authority allocation strategy based on PF-MPC is designed. Different from conventional authority allocation methods that may assign control authority predominantly to one party under high-risk conditions, the proposed strategy incorporates the driving risk potential field into the MPC cost function. This allows the vehicle to move towards a lower-risk region while maintaining coordinated human-machine interaction. (3) Driver-in-the-loop experiments are carried out to compare the proposed method with the latest human-machine SSC methods.
The rest of this paper is organized as follows. The framework of the human-machine SSC system is proposed in Section 2. In contrast, the novel game-theoretic human-machine SSC strategy is constructed in Section 3. Section 4 describes an adaptive authority allocation strategy based on PF-MPC, Section 5 validates the performance of the proposed SSC method through driver-in-the-loop experiments. Finally, Section 6 concludes.
2. Basic framework
The proposed human-machine SSC framework is shown in Figure 1. In the PF-MPC authority allocation strategy, a driving risk potential field is first constructed from road-vehicle information, and the driving authority λ is allocated according to the potential risk and the behaviors of both agents. Meanwhile, a conflict coefficient mapping mechanism is introduced to determine rconf according to the degree of HMC. Based on the vehicle dynamics and driver’s arm NMS models, the DMPC cost functions are designed by incorporating rconf and λ to characterize human-machine interaction. Finally, the control actions of the driver and controller are coordinated through Nash equilibrium and integrated by λ to generate the final steering angle δ. Framework of the proposed SSC method.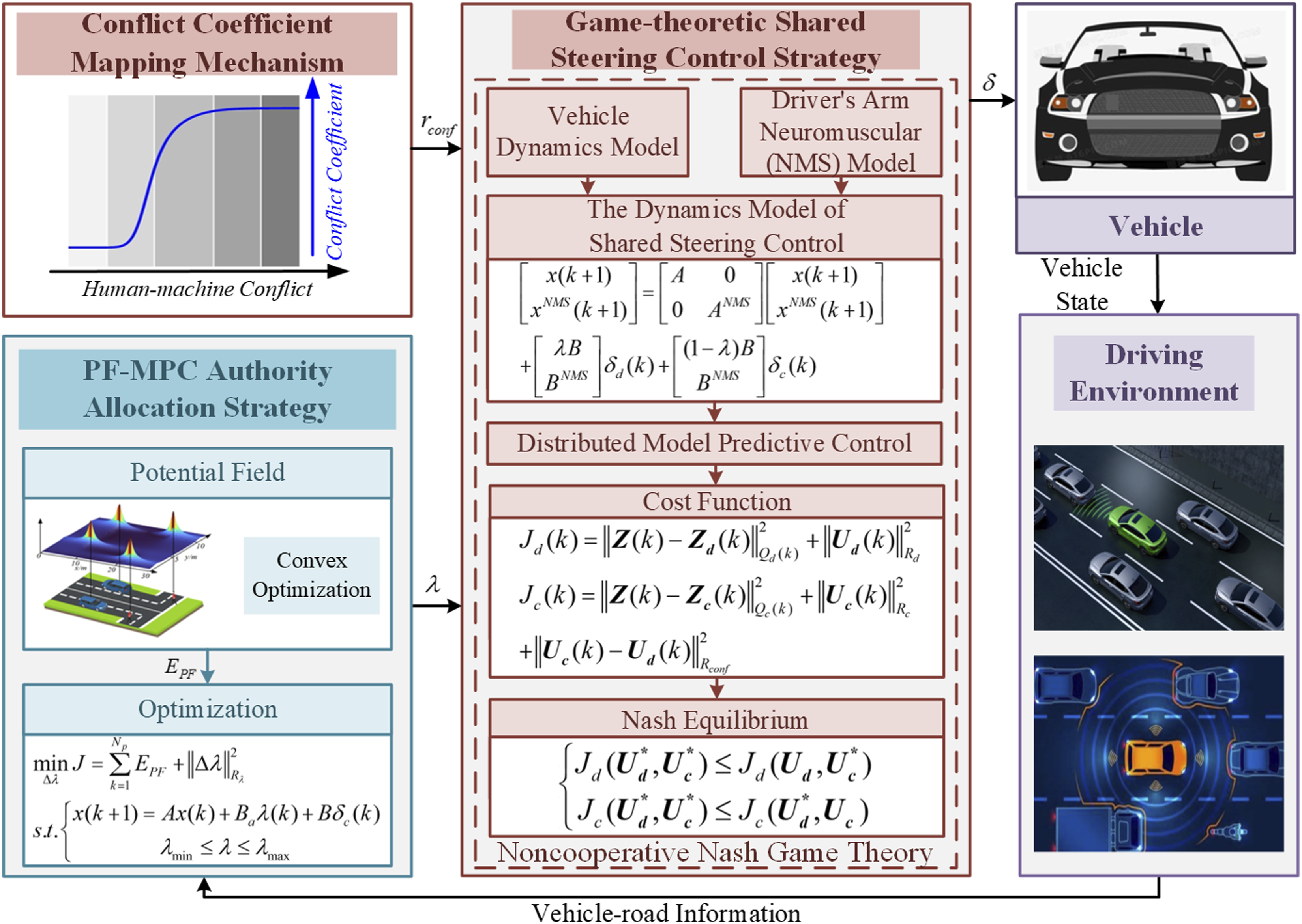
3. Game-theoretic human-machine SSC strategy
Existing game-theoretic approaches for human-machine interaction mainly include cooperative formulations (e.g., Pareto-optimal solutions) and non-cooperative formulations such as Stackelberg and Nash games. Cooperative approaches typically assume that all agents share a common objective, which may not adequately capture the potential HMC arising in safety-critical shared steering scenarios. Non-cooperative Stackelberg games, on the other hand, rely on a predefined leader-follower structure, which may be restrictive when both the human driver and the automatic controller act with comparable autonomy and without a clear hierarchical relationship. To better characterize the interactive and potentially conflicting decision-making process in shared steering control, this work adopts a non-cooperative Nash game formulation.
Figure 2 illustrates the structure of the game-theoretic human-machine interaction model. The intended steering action δ
d
(k) of the driver model is generated based on the desired trajectory Z
d
(k), vehicle state x(k), and controller action δ
c
(k). Considering the driver’s arm NMS characteristics, δ
d
(k) is filtered through the NMS model to obtain the effective steering action Human-machine interaction model.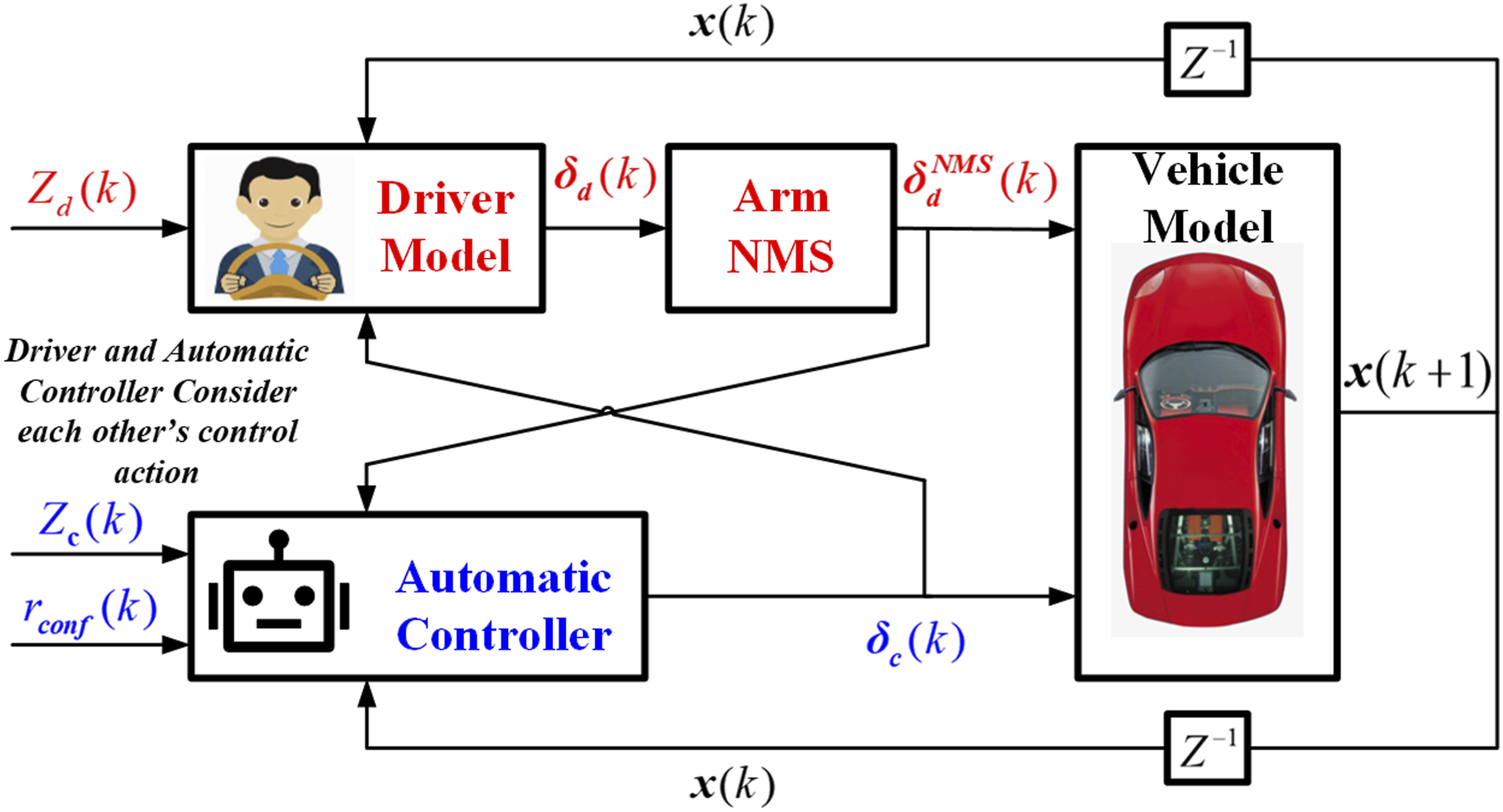
3.1. The dynamics model of SSC
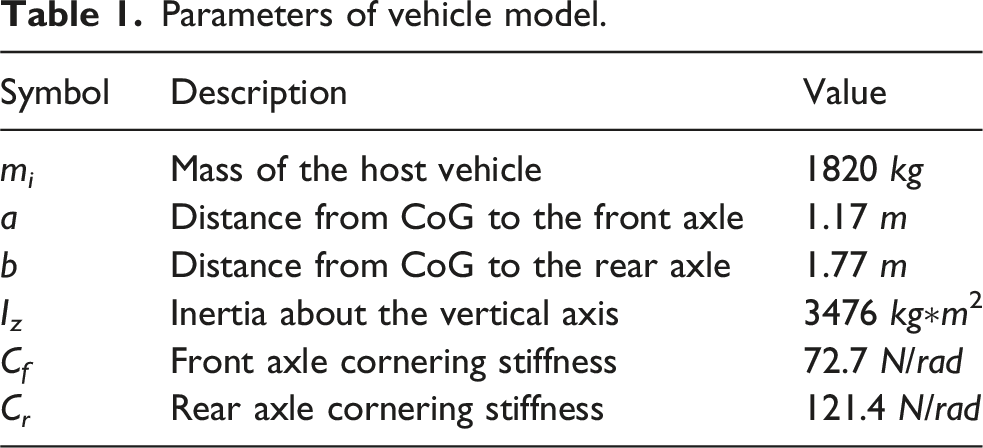
3.1.1. Vehicle dynamics model

Parameters of vehicle model.
3.1.2. Driver’s arm NMS model
The dynamics of the driver’s arm NMS system can be modeled as a second-order low-pass filter Niu and Cole (2020), whose continuous-time state-space model is represented as follows: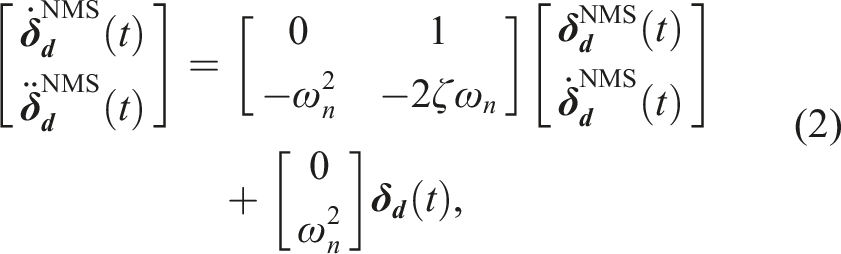
The discrete-time form of (2) can be expressed as:
The vehicle dynamics model (1) and the driver’s arm NMS model (3) are integrated to form a dynamics model of SSC:
In equation (4), z is the output vector.
3.2. Human-machine interaction model
The prediction equations for human-machine interaction can be derived from equation (4) as follows:
In equation (5), N p and N c represent the predicted and controlled iteration steps, respectively.
Based on a human-centered approach, the automatic controller proactively adapts to the driver’s control actions to minimize HMC while tracking its desired trajectory in SSC. Differently, the driver focuses on achieving their target trajectory with minimal control effort. Therefore, the human-machine interaction model is defined as this coupled optimization problem: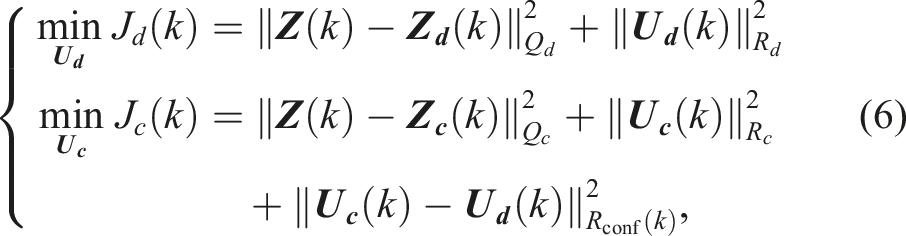
3.3. Nash equilibrium of SSC
Since Q
d
, Q
c
, R
d
, R
c
, and R
conf
are all positive definite matrices, the objective functions J
d
and J
c
are strictly convex with respect to U
d
and U
c
, respectively. Therefore, the proposed formulation in (6) constitutes a convex game. According to standard results in convex game theory (e.g., Wang et al. (2024)), such a game admits at least one Nash equilibrium. It is noted that the uniqueness of the Nash equilibrium is not explicitly guaranteed in general, and depends on additional conditions such as strict monotonicity, which are not imposed in this work. According to the definition of Nash equilibrium, a control input pair 

The superscript † of a matrix denotes the pseudo-inverse of this matrix.
For computational convenience, equation (8) is rewritten as follows:

Substitution of equation (11) and equation (12) yields:
The steering sequence pair (
3.4. Conflict coefficient construction
According to the cost function of the automatic controller in the human-machine interaction model (6), the effect of the automatic controller can be adjusted by the coefficients q
c
, r
c
, and rconf. Specifically, q
c
establishes the requirements for trajectory-tracking accuracy, r
c
constrains the magnitude of control actions, and rconf reflects the tendency of the automatic controller to actively adapt the driver’s behavior. As HMC increases, the automatic controller should proactively align with the driver’s behavior to reduce it. In contrast, the automatic controller should concentrate on maximizing trajectory tracking and minimizing control efforts when the HMC is small. Therefore, while q
c
and r
c
remain constant, a conflict coefficient mapping mechanism based on the magnitude of HMC can be designed. Since this research is mainly concerned with SSC, the extent of HMC can be described by the steering angles of the human driver and automatic controller.
4. Potential field model predictive authority allocation strategy
4.1. Potential fields
In PF-MPC, artificial potential fields have been designed as a core component of the cost function to ensure safety during authority allocation. To evaluate the risk of collision and lane departure, the driving risk potential field EPF comprises both obstacle potential field Eo, i and road boundary potential field Erb,j, which is given by (Li et al., 2022; Mingjun et al., 2023):
4.1.1. Obstacle potential field
The obstacle potential field is defined as follows:
4.1.2. Road boundary potential field
The road boundary potential field can be defined as:
4.2. PF-MPC authority allocation strategy
4.2.1. Predictive model
In SSC systems, the relationship between δ(k), δ
d
(k), and δ
c
(k) is:
According to equation (1) and equation (20), the state equation for the dynamic optimization of the authority allocation can be obtained as follows:
BPF = Bdis(δ
d
(k) − δ
c
(k)),
Then, the predictive model of authority allocation can be depicted as:
In equation (22), NPF describes the predicted iteration step.
4.2.2. Optimization
To ensure the safety of SSC while achieving smooth transitions during authority allocation, the authority allocation can be modeled as following optimization problem: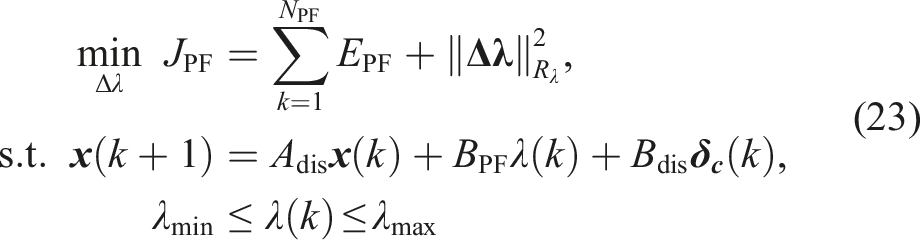
4.2.3. Convexation
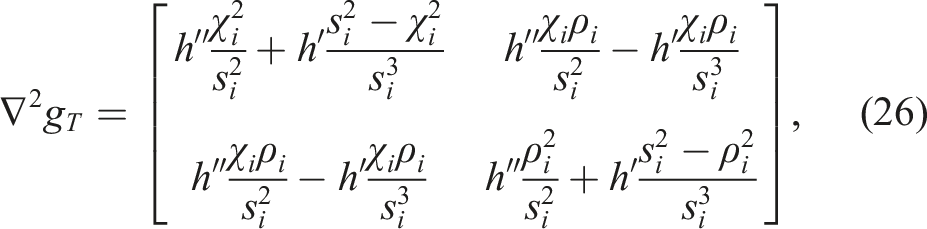
According to the expressions of E
PF
, it can be observed that the optimization problem in (23) is non-convex, which results in a time-consuming solution process. To convexify the optimization problem and reduce the computational burden, a second-order Taylor series expansion is employed to transform E
PF
into an approximately convex function (Rasekhipour et al., 2017). As indicated by (16), the driving risk potential field E
PF
is established in the global coordinate system (X, Y) and can be expressed as g (X, Y). As shown in Figure 3, the relative position between obstacle O
i
and the ego-vehicle can be represented as P1 = (dX, dY). In addition, P2 denotes the normalized relative position vector. Approximate convex process of driving risk potential field.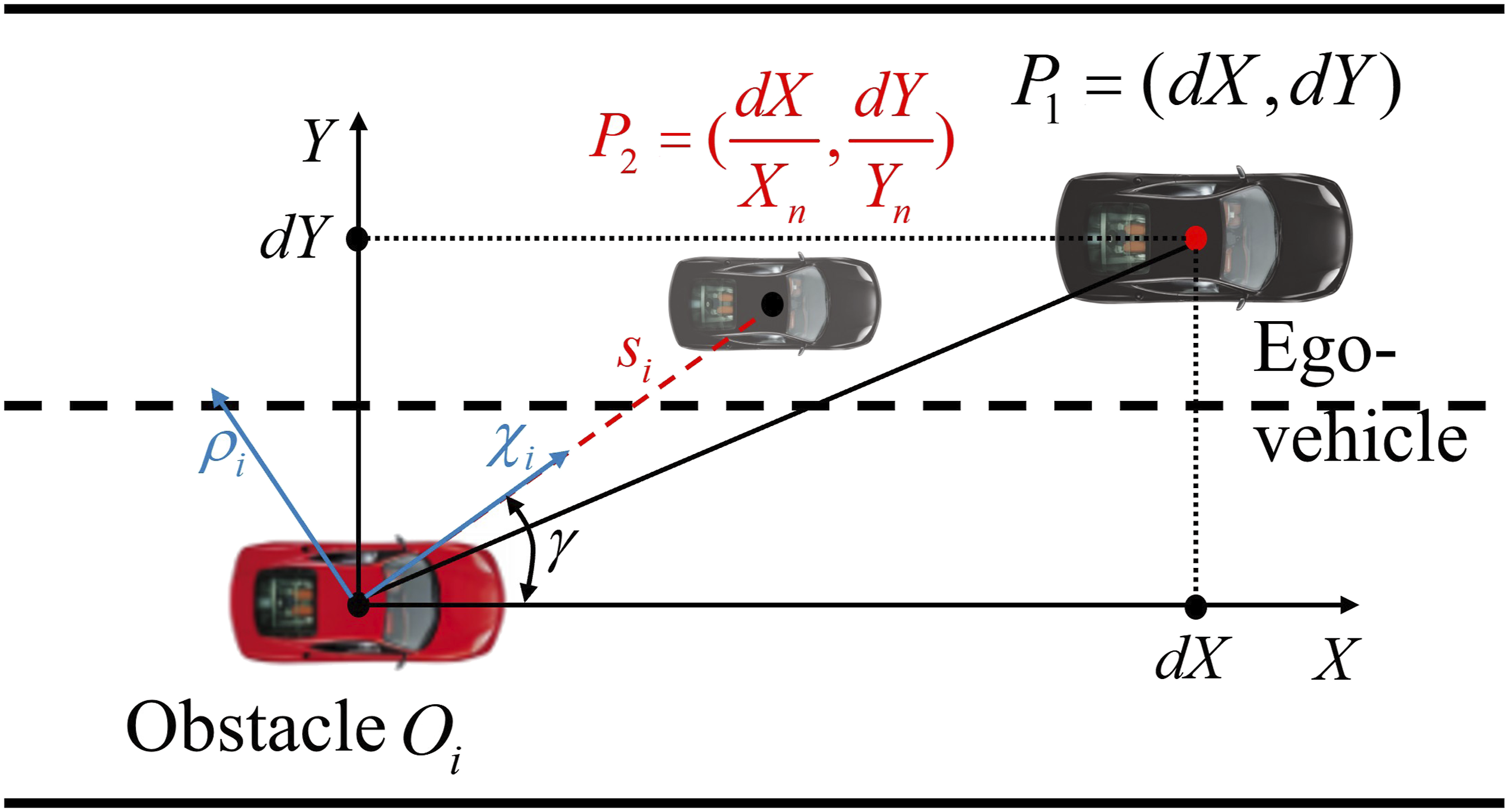
The driving risk potential field E
PF
is then mapped into the (χ
i
, ρ
i
) coordinate system. In this coordinate system, E
PF
can be expressed as a function of the normalized relative distance s
i
, namely, h (s
i
) = g (X, Y). The transformation equation between the (χ
i
, ρ
i
) coordinate system and the (X, Y) coordinate system is given by:

After convexification, the transformed function remains convex when it is mapped back to the (X, Y) coordinate system using (24). The resulting convex function is then incorporated into the optimization problem in (23). This constrained optimization problem can be effectively solved using the sequential quadratic programming (SQP) method. The optimal authority sequence can be obtained as follows:
As a result, the output of the authority allocation model can be described as follows:
5. Experiment setup
5.1. Driver-in-the-loop experimental platform
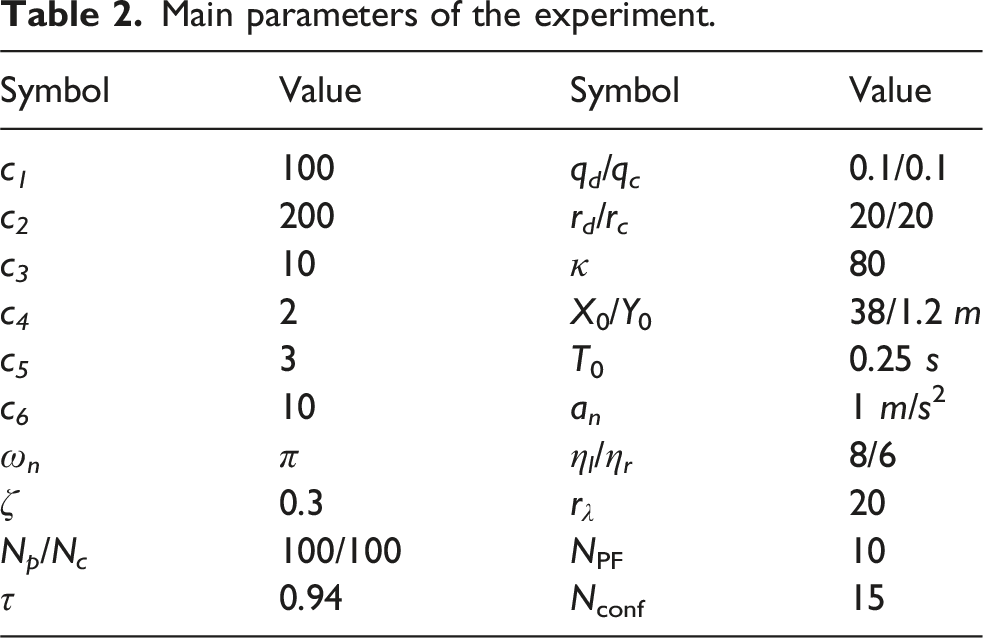
The driver-in-the-loop experimental platform is shown in Figure 4. A Logitech G29 steering wheel system is used to collect the driver’s steering, throttle, and braking inputs. The driving scenarios and vehicle dynamics model are implemented in PRESCAN, while MATLAB is used for co-simulation and real-time data processing. During the experiment, the driver’s inputs are transmitted to the MATLAB/PRESCAN platform, and the corresponding vehicle-road visual information is fed back to the driver. The main experimental parameters are listed in Table 2. The structure of driver-in-the-loop experimental platform. Main parameters of the experiment.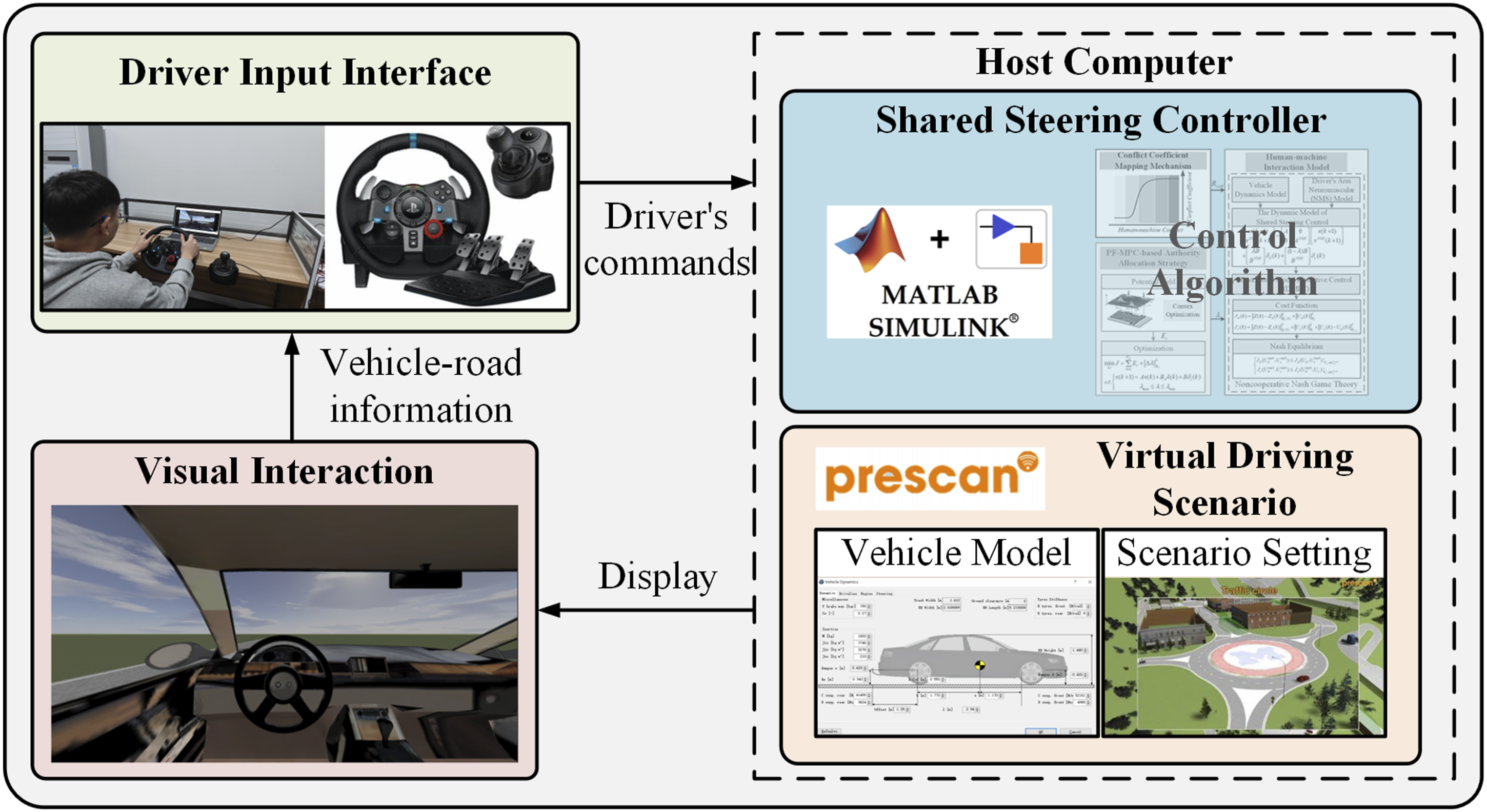
5.2. Working conditions
To evaluate the efficiency of the proposed SSC strategy, two representative working conditions have been designed as shown in Figure 5. In both conditions, two obstacles are placed at the coordinates (100, 0) and (250, 0) to evaluate the performance of the strategy across different target-trajectory designs. Working conditions in driver-in-the-loop experiments.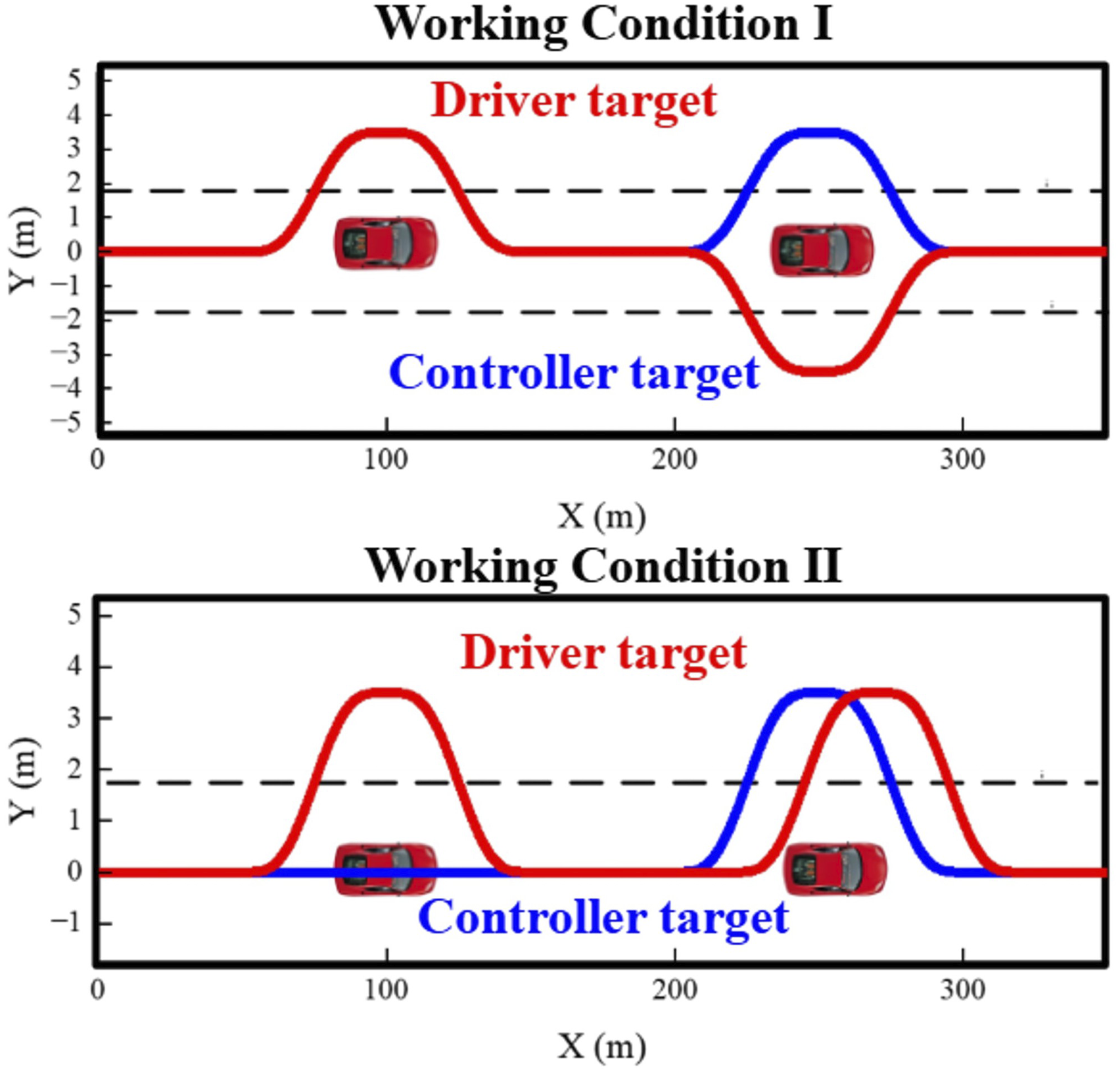
Working Condition I (Cooperative Obstacle Avoidance Validation): Both the driver and the controller have independent obstacle-avoidance capabilities. For the first obstacle, both agents perform a left-side double lane change with identical target trajectories. For the second obstacle, their target trajectories conflict: the driver performs a right-side double lane change, whereas the controller executes a left-side maneuver. This condition evaluates the system’s ability to make decisions and resolve HMC under conflicting target trajectories.
Working Condition II (Fault-Tolerant Mechanism Validation): Unilateral operational errors are introduced to validate the dynamic authority allocation strategy. For the first obstacle, the driver follows a collision-free trajectory, while the controller generates a collision-risk trajectory. For the second obstacle, the driver initially fails to notice the obstacle due to distraction or fatigue, but then performs a double lane change to avoid collision. This condition evaluates driving safety when either the driver or the controller exhibits operational errors.
The proposed game-theoretic shared steering control strategy is formulated as a complete-information game, where the human driver’s target trajectory is assumed to be available to the automatic controller. In practice, this assumption can be interpreted as an approximation, where the driver’s intended trajectory is estimated using existing intention inference or learning-based methods. A number of studies have demonstrated the feasibility of predicting driver behavior or intended paths based on historical states and environmental information (e.g., Zhao et al., 2019; Yan et al., 2025). In this work, our focus is on the design and evaluation of the shared control strategy under this assumption, and the problem of driver intention estimation is not explicitly addressed. Instead, in the experimental setup, we collect multiple driving trials where the human driver operates the vehicle without the shared control system. The average trajectory among three such trials is adopted as the representative target trajectory of the human driver.
5.3. Evaluation for SSC performance and comparative groups
The proposed SSC strategy is comprehensively evaluated through five aspects: driver’s steering workload, driver’s psychological workload, HMC, vehicle stability, and driving risk: • Driver’s steering workload: The driver’s steering workload is evaluated using two metrics, namely the standard deviation of the steering angle DW1 and the discrete-time accumulation of the absolute steering angle DW2 (Liu et al., 2024; Zhang et al 2025b). • Driver’s psychological workload: Xu et al. (2025a) demonstrated that a driver’s psychological workload can be assessed using steering entropy, where a higher entropy value indicates a greater cognitive load. Assuming smooth steering behavior, the steering angle at the current time step δ
d
(k) can be approximated using a second-order Taylor expansion based on the previous steering angles δ
d
(k − 1), δ
d
(k − 2), and δ
d
(k − 3):




Let α denote the 90th percentile of the prediction error distribution. The error range is partitioned into nine regions using the thresholds −5α, −2.5α, −α, −0.5α, 0.5α, α, 2.5α, and 5α. p
i
(i = 1, 2, 3, …, 9) denotes the proportion of the prediction error e(k) in the ith region, and the steering entropy H
p
is then represented as: • HMC: The HMC is evaluated based on two perspective: the deviation between driver’s and automatic controller’s steering behaviors Dai et al. (2023) and the consistency of steering effort between driver and automatic controller Lang et al. (2026).
The deviation between driver’s and automatic controller’s steering behaviors HMC denotes the discrete-time cumulative absolute value of the steering angle difference between the driver and the automatic controller:
The consistency of steering effort between driver and automatic controller Co represents the cosine of the steering angle between driver behavior changes and automatic controller command adjustments: • Vehicle stability: The vehicle stability VS is evaluated based on the maximum value of the absolute yaw rate. • Driving risk: The discrete-time accumulation of E
PF
is applied to evaluate driving risk DR.

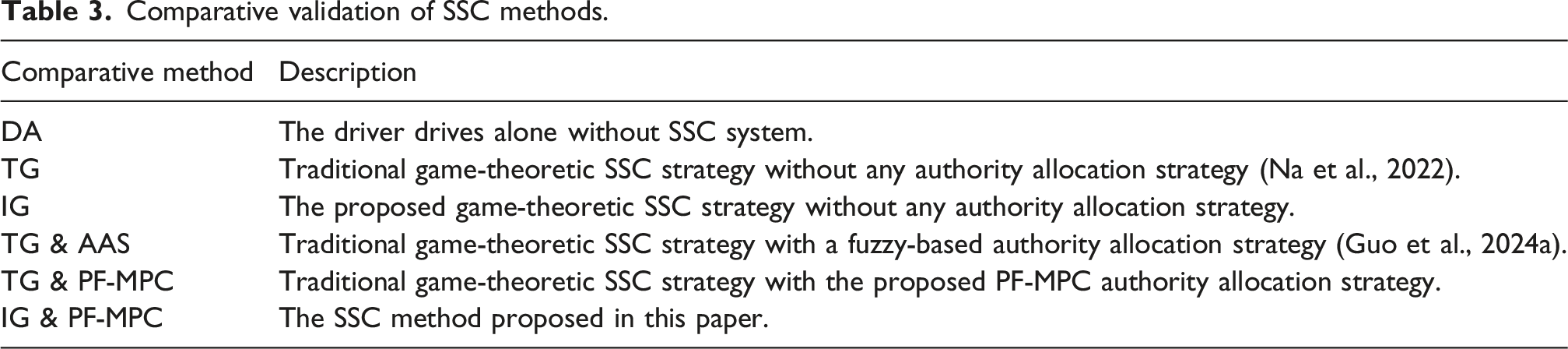
Comparative validation of SSC methods.
5.4. The experimental results analysis
5.4.1. Working Condition I
The experimental results for Working Condition I are illustrated from Figures 6–9. Figure 6 demonstrates the target trajectories of the human driver and automatic controller, as well as the actual vehicle trajectories of six comparative methods. The black dashed and solid lines denote lane-crossing zones and lane boundaries, respectively. Detailed path comparisons from lateral positions X = 50 m to X = 150 m and X = 200 m to X = 300 m are presented in Figure 7(a) and (b), respectively. The target paths of the human driver and automatic controller, and the vehicle trajectories in working Condition I. (a) The driving risk potential field and vehicle trajectories, in the region from X = 50 m to X = 150 m, (b) the driving risk potential field and vehicle trajectories, in the region from X = 200 m to X = 300 m.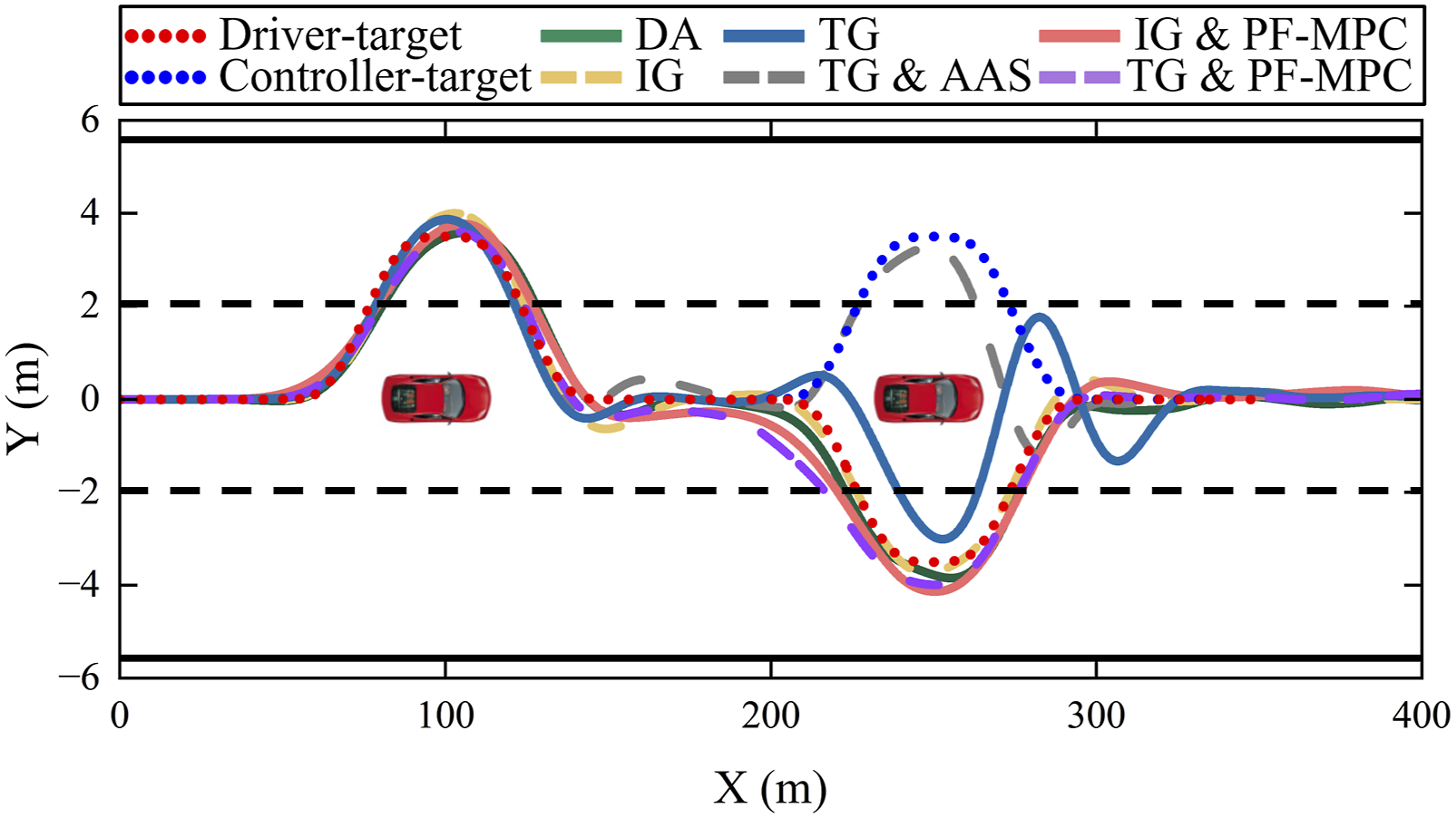
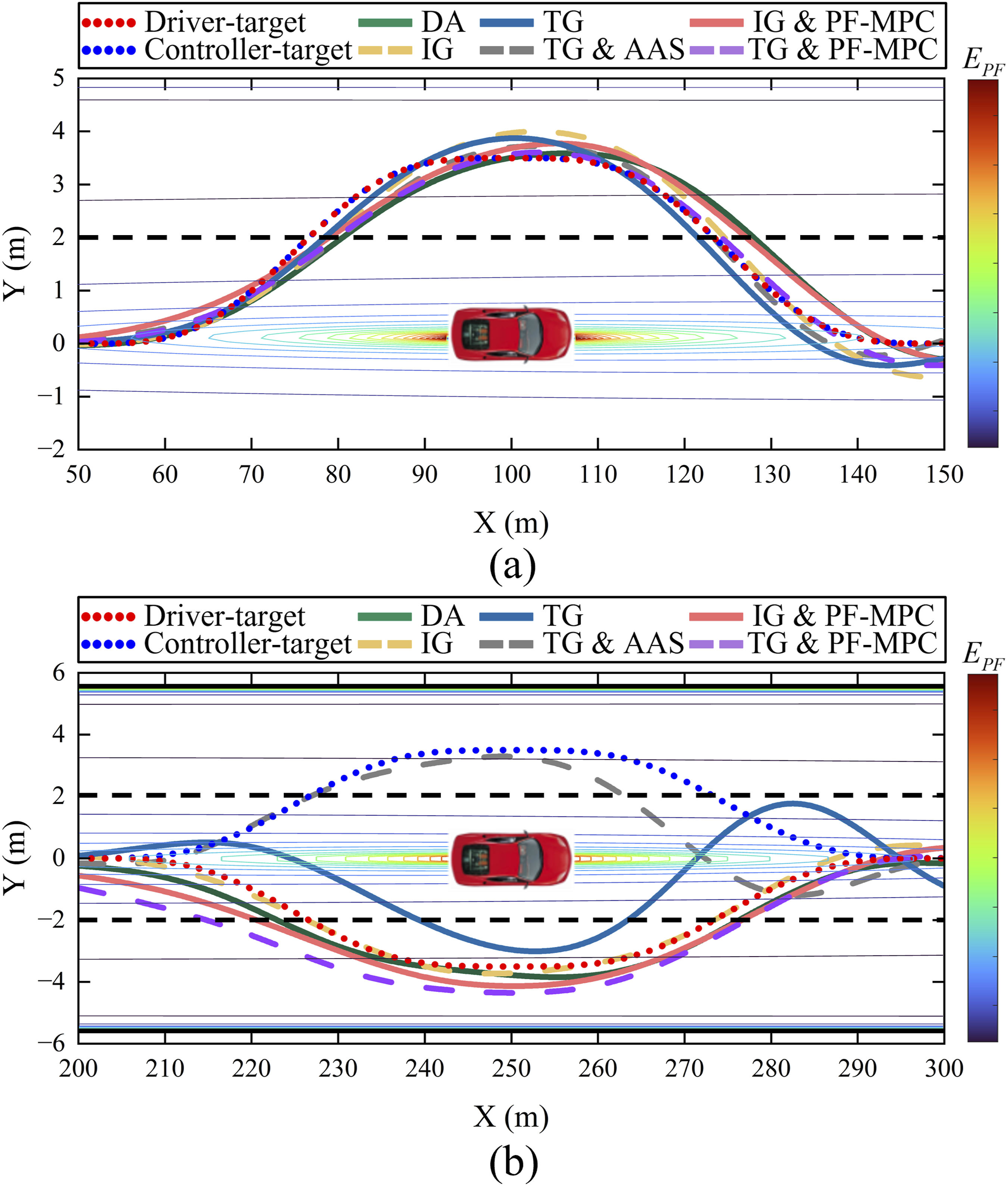
In Figure 7(a), all the methods achieve smooth obstacle avoidance due to consistent target trajectories. However, in the high HMC zone depicted in Figure 7(b), the trajectory under TG exhibits pronounced oscillations. Under TG method, when the target paths of the human driver and the controller differ, the actual vehicle trajectory may deviate significantly from both desired paths. As a result, both agents continuously increase their control inputs to force the vehicle towards their respective target trajectories, which intensifies HMC and leads to trajectory oscillations. It can also be seen that TG & AAS prioritizes automated control under high-risk conditions, whose trajectories are closer to the controller’s reference path. Notably, PF-MPC-based methods (TG & PF-MPC and IG & PF-MPC) demonstrate superior performance, enabling vehicles to run at the lowest-risk gradient position.
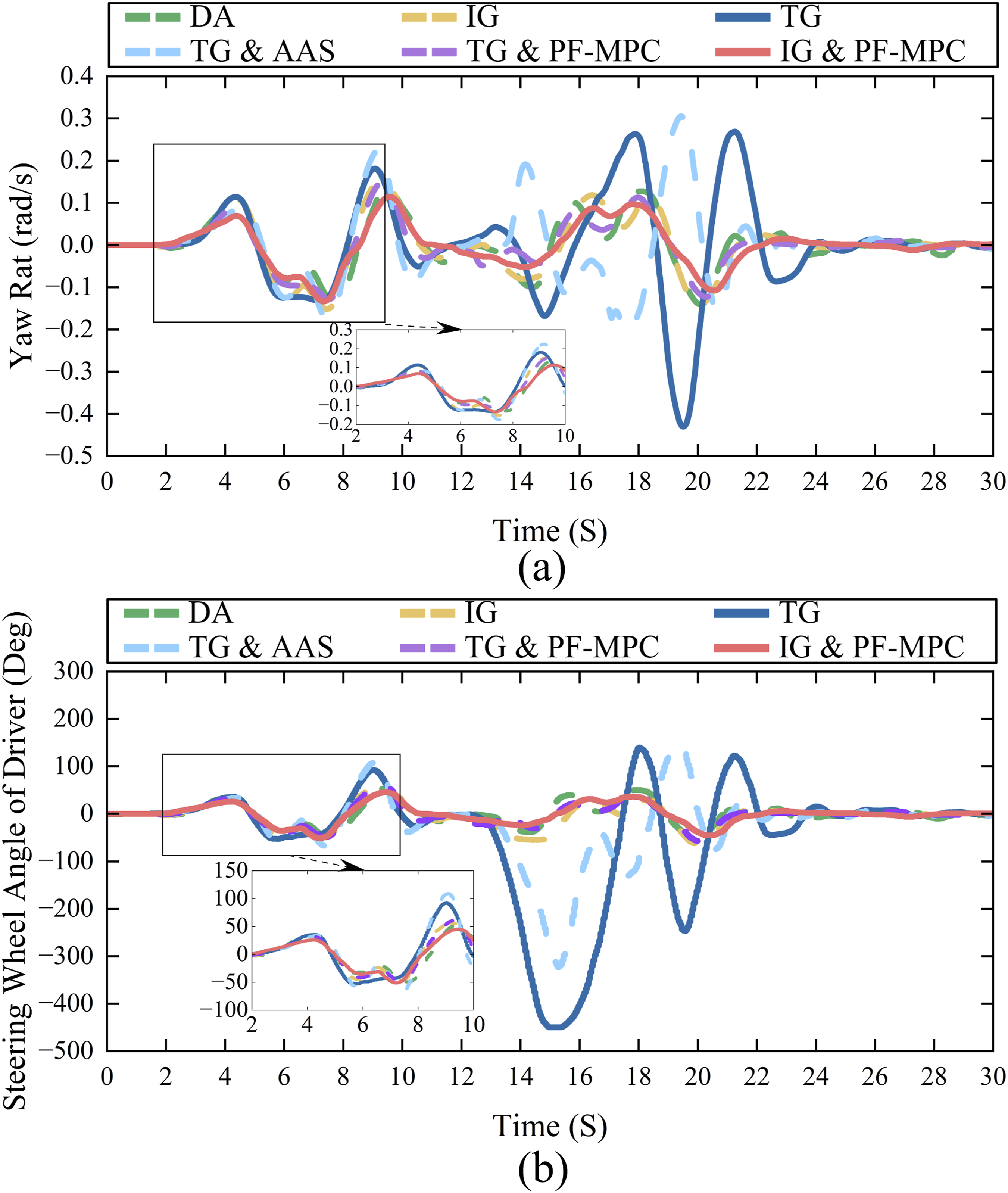
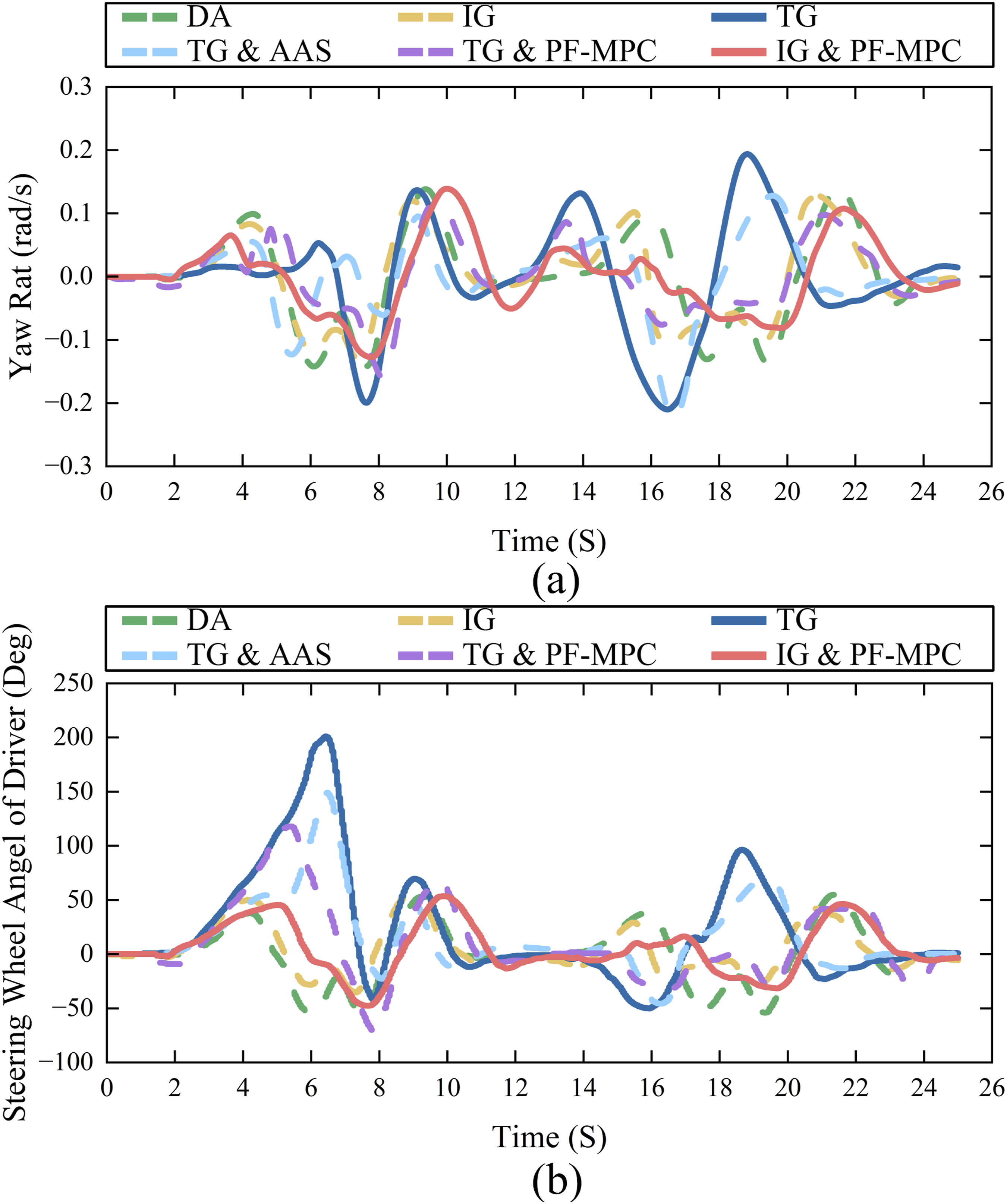
Figure 8(a) presents driving authority variation in TG & AAS, TG & PF-MPC, and IG & PF-MPC methods. In the TG & AAS method, the driving authority is predominantly assigned to the automatic controller in high-risk zones. The conflict coefficients of IG and IG & PF-MPC methods are compared in Figure 8(b). Finally, yaw rates and driver steering angles for all comparative methods are summarized in Figure 9(a) and (b), respectively. It can be observed that, under the IG & PF-MPC method, the driver exhibits the smoothest steering behavior, indicating the lowest driver workload. (a) The driving authorities, (b) the conflict coefficients. (a) The yaw rate, (b) the human driver’s steering angles.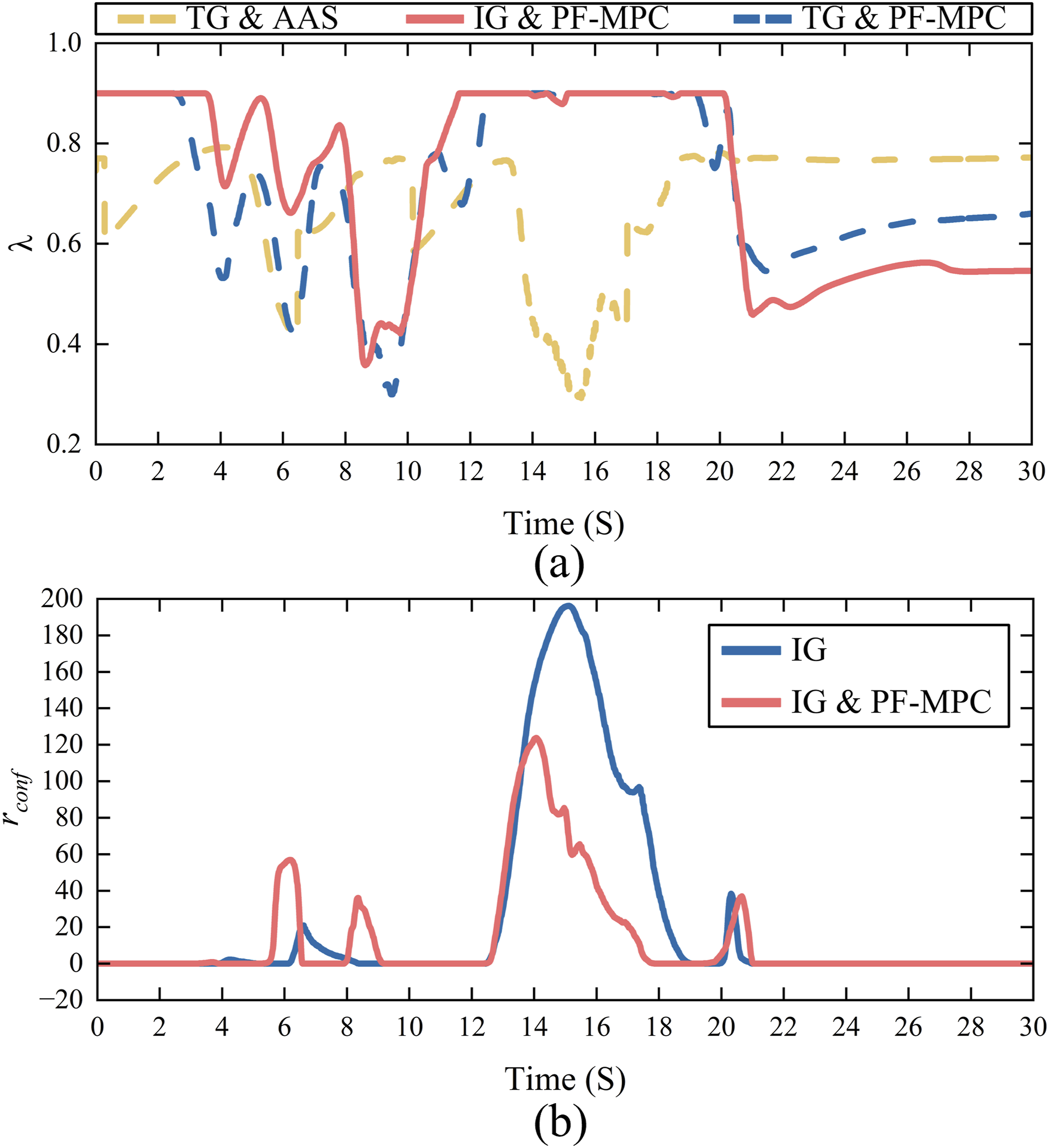
The result of working Condition I.
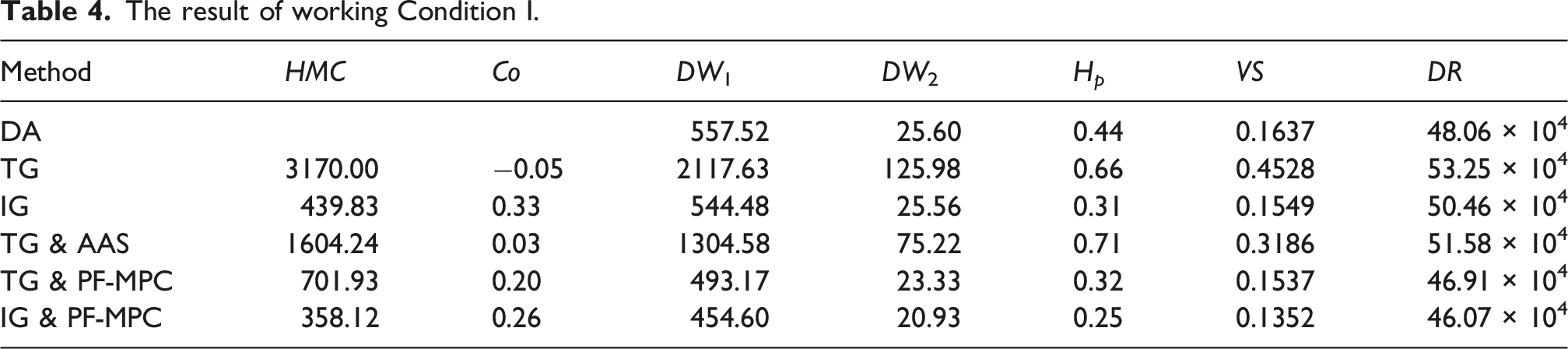
It is worth noting that, the methods employing the proposed game-theoretic SSC strategy (IG and IG & PF-MPC) exhibit superior capabilities in mitigating HMC. This improvement stems from the fundamental difference in interaction modelling. In conventional game-based SSC approaches, human-machine interaction is formulated such that each agent independently minimizes its own path-tracking error, which limits the ability of the automatic controller to actively regulate HMC. In contrast, the proposed interaction framework enables the automatic controller to adapt its control actions to the driver’s potential behavior, thereby effectively alleviating HMC. Additionally, Table 4 demonstrates that the application of PF-MPC for authority allocation (TG & PF-MPC and IG & PF-MPC) provides significant advantages in driving safety. This advantage is attributed to the PF-MPC-based authority allocation strategy, which distributes control authority by guiding the vehicle toward regions with lower driving risk, as characterized by the gradient of the risk potential field, rather than relying on rule-based switching under high-risk conditions.
5.4.2. Working Condition II
Figures 10–13 illustrate the experimental results for Working Condition II. As shown in Figure 10, the target trajectories of the human driver and the automatic controller, as well as the actual vehicle trajectories under six comparative methods, are presented. The detailed trajectories from X = 50 m to X = 150 m and from X = 200 m to X = 320 m are depicted in Figure 11(a) and (b). Although all comparative methods avoided the obstacles, the vehicle trajectories under TG and TG & AAS are relatively hazardous. In particular, it can be noted that trajectory oscillations emerge in the TG method. As in Working Condition I, it can also be found that the traditional game-theoretic SSC strategy suffers from the same limitations in addressing large deviations from the target trajectories. In high-risk scenarios, more authority is allocated to the controller under the TG & AAS method. Thus, larger steering angles will be output by the driver to evade the obstacle when they are aware of an impending collision, as illustrated in Figure 13(b). Notably, the methods employing the PF-MPC authority allocation strategy (TG & PF-MPC and IG & PF-MPC) consistently place vehicles in lower driving risk positions. The target paths of the human driver and automatic controller, and the vehicle trajectories in working Condition II. (a) The driving risk potential field and vehicle trajectories, in the region from X = 50 m to X = 150 m, (b) the driving risk potential field and vehicle trajectories, in the region from X = 200 m to X = 300 m.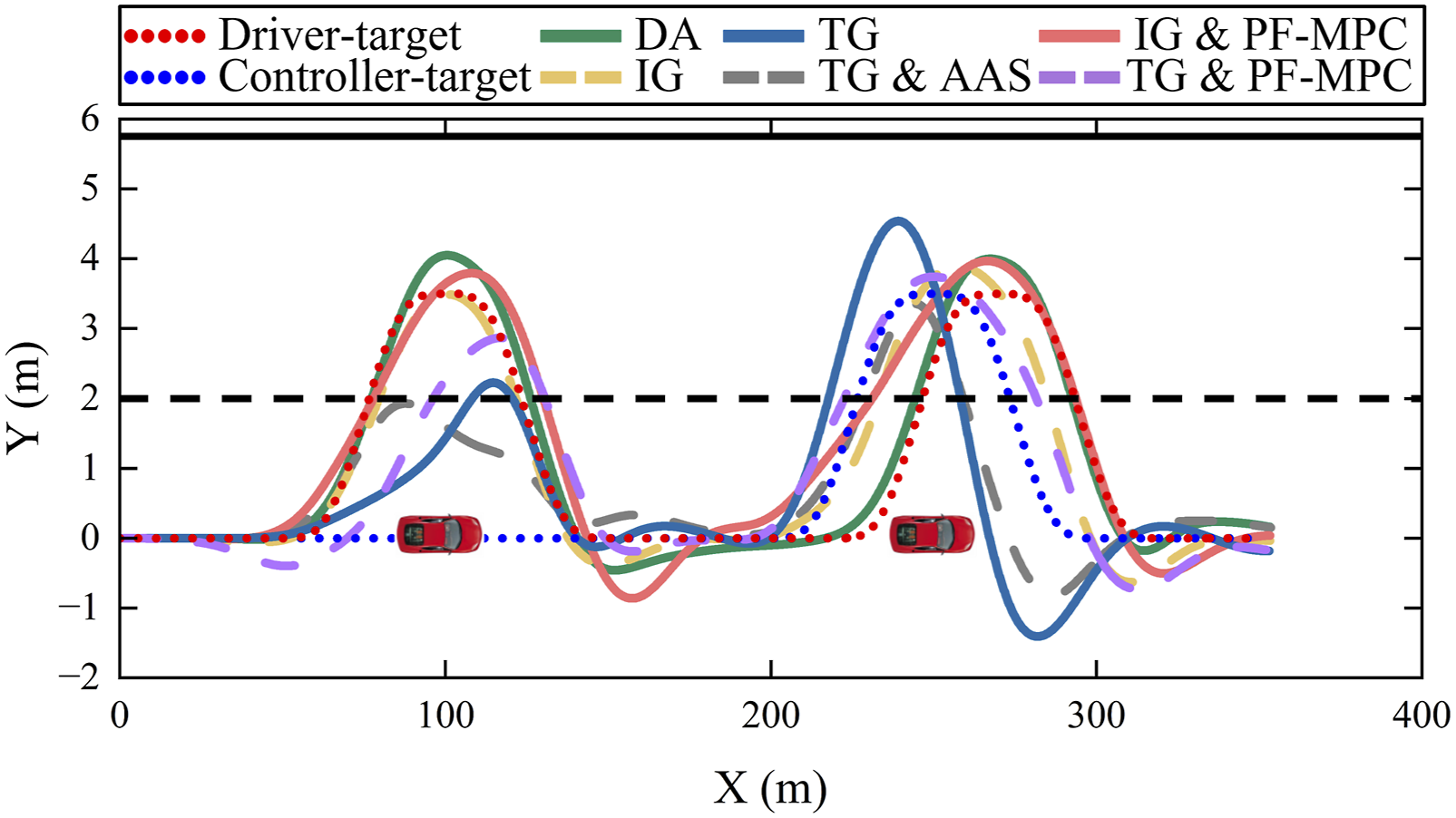
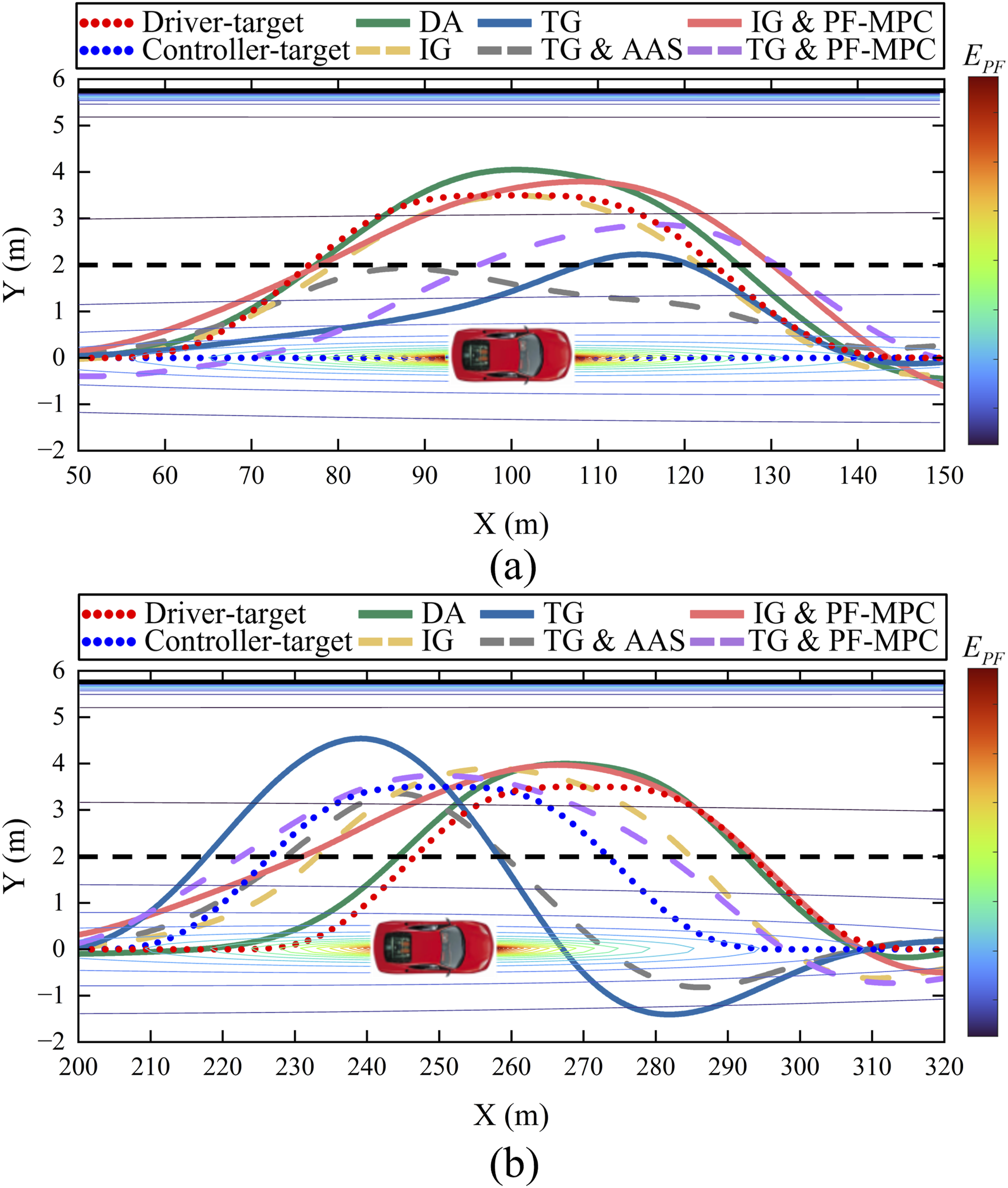
Figure 12(a) depicts the variation in driving authority across the TG & AAS, TG & PF-MPC, and IG & PF-MPC methods. Figure 12(b) compares the conflict coefficients under the IG and IG & PF-MPC methods. Finally, the yaw rates and driver steering angles for all six methods are summarized in Figure 13(a) and (b), respectively. It can be found that, under the IG & PF-MPC method, both the driver’s steering angle and yaw rate are the lowest. (a) The driving authorities, (b) the conflict coefficients. (a) The yaw rate, (b) the human driver’s steering angles.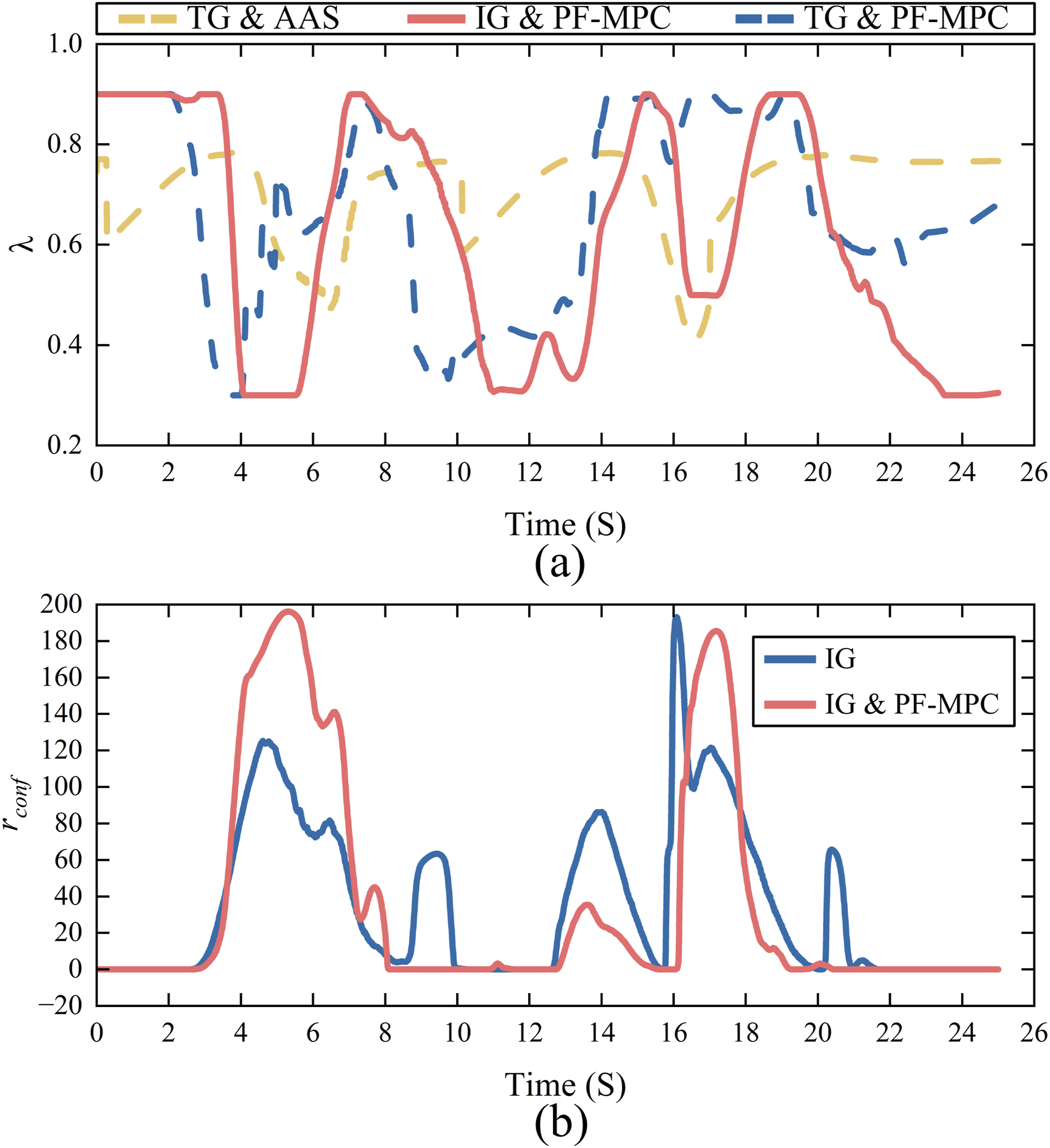
The result of working Condition II.
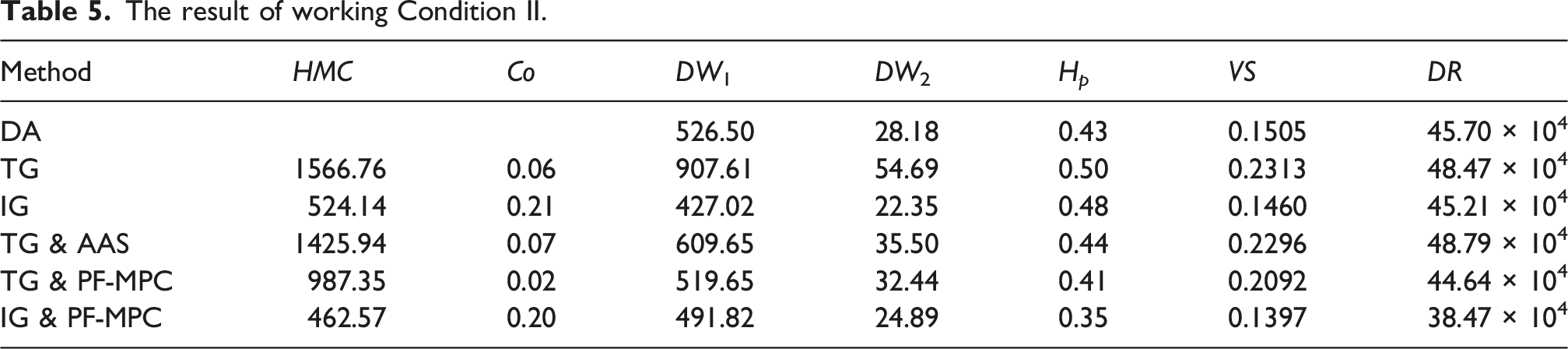
These results demonstrate the superior performance of the IG & PF-MPC method, thereby validating the effectiveness of the proposed SSC strategy. Consisten with Working Condition I, the methods with the proposed game-theoretic SSC strategy (IG and IG & PF-MPC) significantly mitigate HMC. Additionally, the PF-MPC in both the TG & PF-MPC and IG & PF-MPC methods provides a significant advantage in ensuring driving safety. In this scenario, where both the driver and the automatic controller exhibit individual operational deviations, the conventional rule-based authority allocation method (TG & AAS) tends to aggravate driving risk. Conversely, the proposed PF-MPC method, by allocating authority from the perspective of reducing the gradient of the driving risk potential field can improve the driving safety.
The results in Tables 4 and 5 also suggest that authority allocation can contribute to HMC mitigation. Since the final steering command is generated by combining the driver’s input and the controller’s input, the allocation of control authority directly affects the degree of opposition between the two agents. An adaptive allocation mechanism can reduce unnecessary controller intervention. Therefore, HMC can be mitigated to some extent through authority allocation design. However, authority allocation should not be regarded as a substitute for interaction-aware shared steering control. It mainly alleviates conflict at the control execution level, whereas the proposed game-theoretic SSC strategy addresses conflict at the control generation level by considering the interaction between the driver and the controller. Therefore, the observed reduction in HMC is attributed to the complementary effects of interaction-aware control generation and authority allocation.
6. Conclusions
In this study, a game-theoretic adaptive human-machine SSC method considering safety-assured HMC resolution is presented. The novel game-theoretic SSC strategy is constructed by noncooperative Nash game theory and DMPC. In this framework, the automatic controller can anticipate and adapt to the driver’s potential behaviors proactively to mitigate HMC. Furthermore, the PF-MPC authority allocation strategy is designed with consideration of the driving risk potential field, and driving safety is significantly improved.
To validate the efficacy of the proposed method, driver-in-the-loop experiments are conducted to compare it with state-of-the-art SSC approaches. The experimental results demonstrate that, under both working conditions, the proposed method not only alleviates HMC and reduces the driver’s physical and mental workload, but also enhances driving safety and stability. For instance, in the cooperative obstacle avoidance validation scenario, the proposed method achieves substantial reductions in HMC, DW1, DW2, H p , VS, and DR by 88.70%, 78.53%, 83.39%, 62.12%, 70.14%, and 13.48%, respectively, compared with the TG method, while improving Co by 620.00%. Similarly, compared with the TG & AAS method, the proposed method reduces HMC, DW1, DW2, H p , VS, and DR by 77.68%, 65.15%, 72.16%, 64.79%, 57.56%, and 10.68%, respectively, while increasing Co by 766.00%.
However, the current research paid insufficient attention to individual driver characteristics, which may impede the full mitigation of HMC and ultimately diminish the overall effectiveness of SSC. Future investigations will prioritize integrating driver-specific traits to enhance personalized assistance. Additionally, as the current experiments were conducted in a driving simulator, future work will involve testing in actual vehicles to validate the findings further.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Key Research and Development Program under Grant 2023YFC2907600, National Natural Science Foundation of China under Grant 52475143, in part by Jiangsu Provincial Natural Science Foundation (BK20241638), in part by the project of Shaanxi Key Laboratory of Mine Electromechanical Equipment Intelligent Detection and Control (Xi’an University of Science and Technology) (No. SKL-MEEIDC202402), and in part by State Key Laboratory of Mechanical System and Vibration under Grant MSV202607.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.