
Abstract
Vibration transfer response prediction of isolation systems is critical for transfer path analysis, isolation design, and online monitoring in noise and vibration control. Under complex multi-level and mixed tonal-broadband excitations typical of engineering practice, conventional methods based on frequency response function (FRF) inversion suffer from noise sensitivity and ill-conditioning, making high-precision time-domain prediction difficult—particularly when isolation elements exhibit amplitude-dependent nonlinear characteristics. This paper proposes a gray-box modeling architecture (CFIR-NR) that combines a causal FIR backbone with a short-window nonlinear residual, establishing a strictly causal, single-point supervision time-domain streaming prediction framework. The long-memory causal FIR network captures the dominant linear transfer characteristics of the isolation system, while a lightweight MLP residual network compensates for amplitude-dependent nonlinear deviations. Experiments across 20 methods show that CFIR-NR achieves low-frequency prediction accuracy comparable to or better than the best baseline models. With approximately 12 discrete sweep conditions, it stabilizes time-domain prediction accuracy to R2 ≥ 0.98 and enables extrapolation to complex excitation responses. Without requiring FRF measurement, CFIR-NR provides an accurate, interpretable, and practical solution for low-frequency vibration transfer problems.
Keywords
1. Introduction
Predicting the vibration transfer response of isolation systems is fundamental to transfer path analysis (TPA), isolation system design, and online monitoring in noise and vibration (NVH) control. In engineering practice, where excitation conditions combine tonal and broadband random components, conventional frequency response function (FRF)-based methods struggle to achieve generalized time-domain prediction. These difficulties stem from noise sensitivity, ill-conditioning, amplitude-dependent nonlinear behavior of isolation elements, and the stringent requirements for time-domain consistency and low-latency deployment in the low-frequency band. Achieving accurate vibration transfer response prediction under complex excitation has therefore become a key challenge for improving vibration control.
Impedance methods and TPA are the two most commonly used linear frequency-domain approaches, based on linear time-invariant assumptions and requiring matrix inversion or regularized solutions. Impedance methods focus on force-velocity relationships at isolation element interfaces Belsheim and Remmers, 1964; Ohta et al., 2003; Ruan et al., 2014; Sakata, 1974; Wang et al., 2006; Zhao et al., 2017, but their element-level focus means they rarely extend to system-level vibration transfer prediction under complex excitation. TPA establishes input-output transfer relationships for system-level response prediction and path contribution analysis De Sitter et al. (2010); De Klerk and Ossipov (2010); Van der Seijs et al. (2016). However, both methods struggle with noisy and ill-conditioned conditions due to frequency-domain inversion, and their frequency-by-frequency independent processing hinders cross-frequency coupling and time-domain consistency.
Traditional TPA/OTPA, centered on FRF measurement and pseudoinverse solution, has been applied across various engineering domains De Sitter et al. (2010); De Klerk and Ossipov (2010); Almirón et al. (2022); Vaitkus et al. (2019). However, achieving high-precision low-frequency time-domain prediction under complex excitation still requires addressing several trade-offs. First, pseudoinverse and SVD truncation are prone to noise amplification under ill-conditioned conditions. Although regularization strategies have provided some relief Thite and Thompson (2003a,b); Cheng et al. (2016); Buccini et al. (2020); Tang et al. (2022); Senčič et al. (2025), parameter selection and robustness remain concerns. Second, cross-path coupling can lead to rank deficiency and contribution ambiguity Oktav et al. (2017); Cheng et al. (2020, 2021); Park and Kang (2024); Zhang et al. (2026); Kim et al. (2017). Third, path omission leads to energy redistribution among selected paths, affecting time-domain consistency and interpretability De Klerk and Ossipov (2010); Zhang et al. (2026).
For system-level vibration transfer and response prediction, impedance methods and TPA establish input-output mappings through frequency-domain transfer function matrices—hereafter referred to as “conventional TPA methods” and used as frequency-domain baselines. As noted in recent comparative studies Yoshida and Tanaka (2016); Diez-Ibarbia et al. (2017); Tatlow and Ballatore (2017); Cervantes-Madrid et al. (2021); Prenant et al. (2023), frequency-domain approaches rely on block-wise global transforms that are inherently non-causal, unsuitable for streaming inference, and lack the capacity to characterize weak nonlinear or slowly time-varying dynamics under ill-conditioned and noisy conditions. This motivates exploring time-domain causal modeling approaches that operate directly on operational data.
Recent data-driven transfer modeling can be broadly categorized into three approaches. (1) Frequency-by-frequency regression uses complex-valued or deep networks to independently regress transfer relationships at each frequency point, avoiding matrix inversion while maintaining phase consistency (e.g., NOTPA Lee and Lee (2020), Deep OTPA Lee and Park (2023), physics-guided networks Park and Kang (2024, 2026)), but requires mechanisms for cross-frequency coupling and time-domain consistency. (2) Learner-based transfer matrix estimation replaces SVD/pseudoinverse with regressors on frame-level spectral features, reducing ill-conditioning Cunha et al. (2023); Khakshournia et al. (2026), but relies on framing and matrix assembly that require specialized design for streaming inference. (3) Generalized machine learning applications for vibration/acoustic tasks, including brake squeal detection Zhao et al. (2019), acoustic array diagnosis Janssen and Arteaga (2020); Stender et al. (2021), path contribution analysis Haghighi et al. (2025), structural health monitoring Abdeljaber et al. (2017), rotating machinery fault diagnosis Janssens et al. (2016), physics-informed vibration modeling Abbasi et al. (2024); Sun and Zhang (2025); Huang et al. (2025b); Sivaranjani et al. (2025), and vehicle interior noise prediction Tsokaktsidis et al. (2021). Huang and Yang Huang and Yang (2023) further provided an energy shunt-based classification framework for vibration control.
The limitations of linear assumptions in isolation system modeling are increasingly recognized. Experimental studies have documented amplitude-dependent nonlinear characteristics: stiffness softening in rubber isolators Roncen et al. (2019), nonlinear transfer in metal rubber Ma et al. (2023), resonance frequency drift under varying excitation Chen et al. (2016), and stiffness nonlinearity effects on response spectra Langley (2026). In nonlinear vibration isolation, quasi-zero-stiffness (QZS) isolators deliberately introduce geometric or magnetic nonlinearity for low-frequency isolation Ding et al. (2023); Jiang et al. (2025). Even conventional rubber isolators exhibit excitation-dependent transfer characteristics Richards and Singh (2001), and nonlinear isolation/absorption/energy-harvesting structures Huang et al. (2025a); Huang (2024); Huang et al. (2024); Huang and Yang (2021) and multi-stable designs Fang et al. (2026); Zhang et al. (2024) further confirm the universality of nonlinear behavior. However, existing research predominantly uses parametric modeling and frequency-domain analysis, with no data-driven approach directly learning nonlinear transfer characteristics from operational data.
Overall, existing data-driven vibration transfer methods face three critical deficiencies for low-frequency time-domain prediction under complex excitation: frequency-by-frequency or framed schemes lack cross-frequency coupling and time-domain consistency; conventional TPA relies on FRF measurement with noise amplification under ill-conditioned inversion; and amplitude-dependent nonlinear characteristics have not been directly learned from operational data.
To address these gaps, this paper proposes that the vibration transfer response of isolation systems can be decomposed into dominant linear transfer characteristics and nonlinear residual compensation. Based on this principle, we develop CFIR-NR, a data-driven method combining a causal finite impulse response (FIR) backbone with a nonlinear residual, which implements this decomposition through end-to-end learning from operational data without requiring FRF measurement. Using a two-stage vibration isolation test bench with multi-level sweep, band-limited noise, and colored noise excitations, we train on a few discrete sweeps and test on unseen complex excitations to evaluate time-domain consistency, generalization, and streaming deployment feasibility. The remainder of this paper is organized as follows: Section 2 details the CFIR-NR architecture; Section 3 describes the experimental setup, baselines, and metrics; Section 4 presents experimental results including cross-framework comparison, ablation analysis, and virtual experiments on nonlinear transfer characteristics; and Section 5 concludes the paper.
2. Signal mapping modeling method with causal FIR backbone and nonlinear residual
This section presents the data-driven solution framework for signal mapping prediction, which avoids FRF measurement by directly learning mappings from operational data. The method is described in four parts: (1) problem formalization; (2) causal constraints; (3) causal FIR backbone and nonlinear residual model; and (4) training and inference procedures. Figure 1 provides an overview. Overall framework of the causal FIR + nonlinear residual two-point method for data-driven TPA.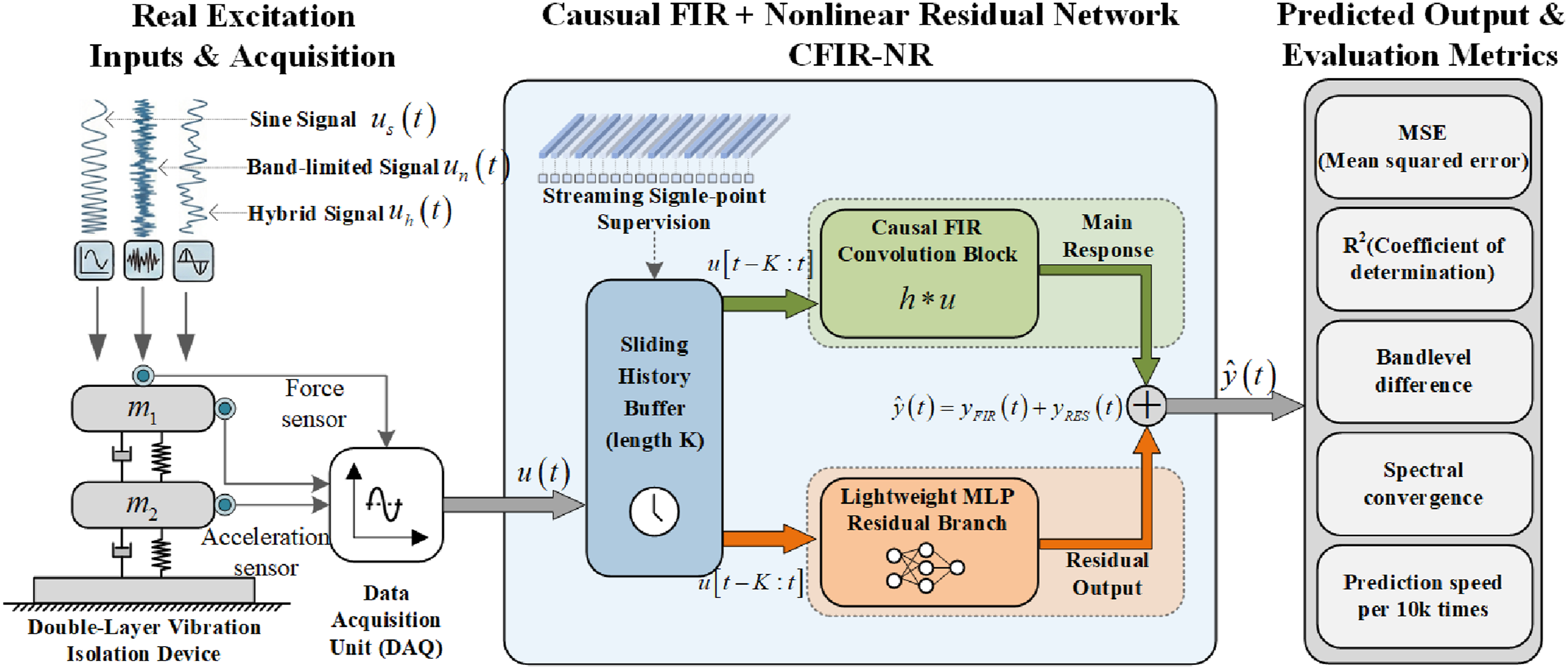
2.1. Problem formalization
From physical mechanisms, the dynamic behavior of a multi-degree-of-freedom vibration system can be described by second-order linear ordinary differential equations


Conventional vibration transfer analysis methods, such as impedance methods and TPA, are both built upon this linear time-invariant (LTI) model. Impedance methods focus on dynamic characteristics at component interfaces, defining mechanical impedance

However, the linear assumption in equation (1) is often difficult to satisfy in practical engineering. For isolation systems containing rubber and other polymer materials, stiffness k and damping c typically depend on excitation amplitude, frequency, and other factors, that is,

Accurate parametric modeling and calibration of such a nonlinear system is extremely difficult, and its linearization processing in the frequency domain introduces significant errors, leading to reduced prediction accuracy of conventional frequency-domain methods. Additionally, the inherent ”block processing” and “global transformation” characteristics of frequency-domain methods make low-latency online streaming prediction difficult.
To avoid the difficulty of precisely modeling complex nonlinear physical parameters, this paper proposes a data-driven end-to-end modeling approach. This method no longer attempts to identify the physical parameters in equation (4), but directly learns the mapping relationship

Compared to frequency-by-frequency or framed modeling, this time-domain paradigm inherently maintains cross-frequency coupling and phase continuity, avoids stationarity assumptions and inverse transforms, and enables nonlinear residual compensation for amplitude-dependent effects—overcoming key limitations of linear frequency-domain approaches.
2.2. Causal constraints
The core constraint is strict causality: prediction y[n] depends only on historical inputs {u[n − K], …, u[n − 1]}, using no future information. This ensures physical realizability and aligns with online engineering deployment.
Both training and inference adopt the single-point supervision paradigm: for each moment n, the most recent K historical points are used as inputs, and only the current output y[n] is supervised. Detailed procedures are provided in Section 2.4.
2.3. Causal FIR backbone and nonlinear residual model
For solving signal mapping in real systems, this paper proposes a causal FIR decomposition model. It adopts a gray-box paradigm that bridges white-box physical modeling and black-box data-driven approaches. Unlike white-box models, CFIR-NR does not require explicit physical parameter identification (e.g., stiffness and damping matrices), but instead learns signal mapping relationships directly from operational data. Unlike black-box deep models, its “linear FIR backbone + nonlinear residual” decomposition preserves the physical interpretability of the backbone—FIR coefficients directly correspond to system impulse responses—while a lightweight residual branch compensates for nonlinear deviations, achieving a balance between interpretability and expressiveness. The core idea is to decompose the mapping into “dominant linear + residual correction” two parts: the backbone uses linear FIR to characterize dominant frequency response and cross-frequency coupling; the residual uses lightweight MLP to compensate for local deviations under amplitude-dependent scenarios. The overall structure remains causal, interpretable, and deployable, as shown in Figure 2. Architecture of the CFIR-NR method: Causal FIR backbone with nonlinear residual branch.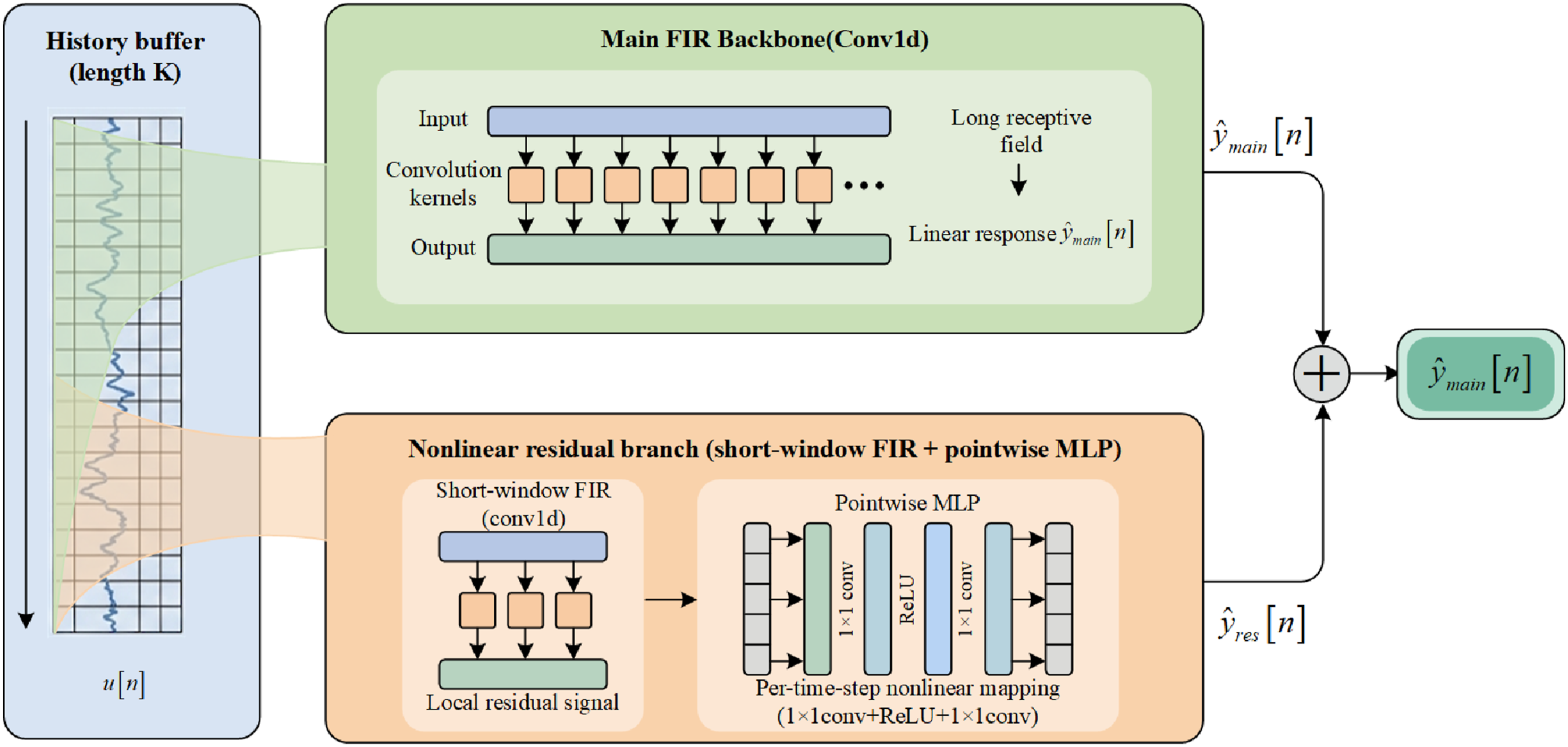
2.3.1. Causal FIR backbone
The model’s backbone is a causal finite impulse response (FIR) filter, used to characterize the system’s main linear mapping characteristics. For discrete-time systems, causal FIR filters can be expressed as

In implementation, causal FIR is realized through one-dimensional causal convolution, using valid convolution (padding = 0) to ensure strict causality. Convolution kernel weights hmain[k] are directly learned from actual test data, with length Lmain characterizing the system’s memory time. The relationship between memory time Tmemory and sampling rate is: Tmemory = Lmain × T s = Lmain/f s , where T s = 1/f s is the sampling period and f s is the sampling rate. For example, when Lmain = 1024 and f s = 2048 Hz, the memory time Tmemory = 1024/2048 = 0.5 seconds.
2.3.2. Residual correction term
To compensate for systematic deviations of the backbone in specific frequency bands or weak time-varying conditions, the model introduces a causal nonlinear residual branch. The residual first performs linear aggregation on the input through short-window causal FIR to obtain local linear residual
2.3.3. Model output
The model output is defined as the superposition of the backbone response and nonlinear residual correction term


The above “causal FIR backbone + nonlinear point residual” decomposition maintains a single-input single-output causal convolution form structurally, yet has stronger expressivity than pure linear FIR models in terms of amplitude and frequency dependence, enabling high prediction accuracy and engineering usability when nonlinear features are more pronounced.
2.4. Training and inference procedures
The complete CFIR-NR method execution process includes three main stages: data preprocessing, model training, and online inference, as shown in Figure 3: Data preparation and streaming single-point supervision.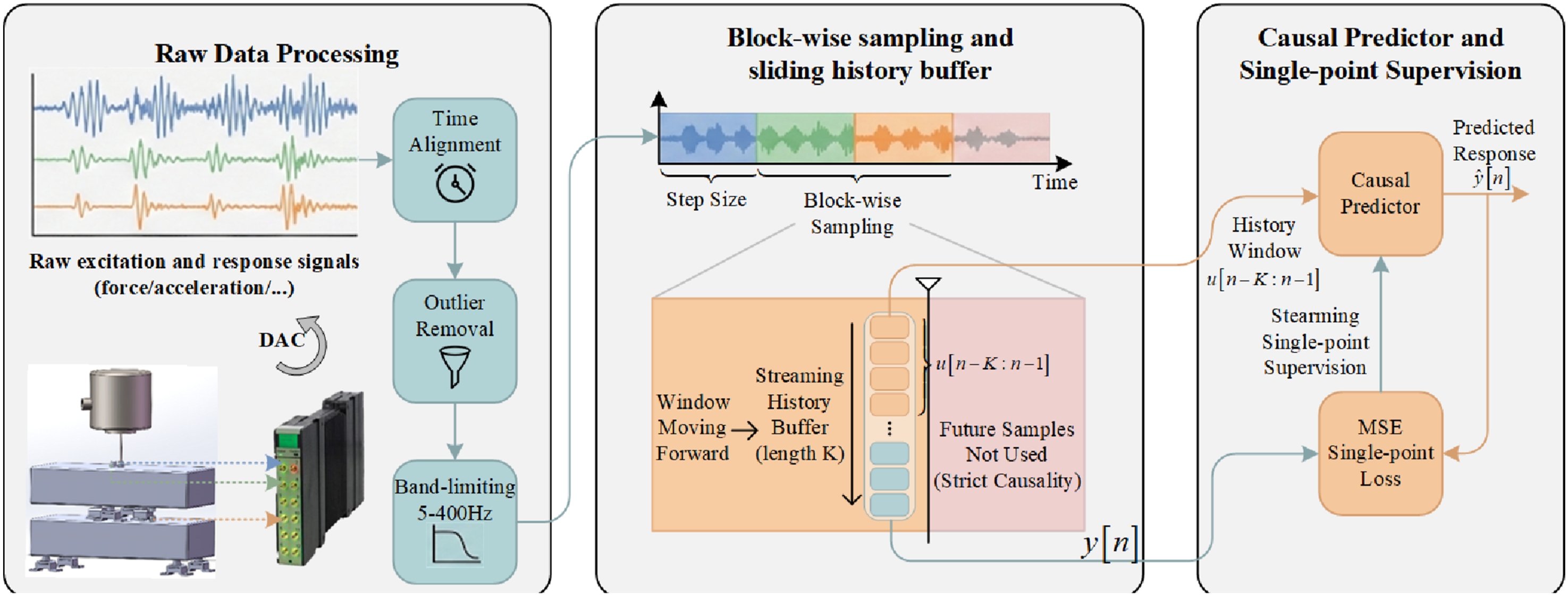
2.4.1. Stage 1: Data preprocessing
Input signals u(t) and output signals y(t) are synchronously acquired at sampling rate f s , time-aligned, and cleaned of outliers. Long sequences are segmented into fixed windows (2048 points) with stride (1024 points), forming input-output sample pairs. Sweep data is split 80/20 at block level into training and validation sets; band-limited noise and colored noise data are reserved as independent test sets. Raw data is used without normalization.
2.4.2. Stage 2: Model training
All weights and biases are initialized to zero so the residual branch starts silent and only the backbone contributes initially. Each sample yields backbone output ymain[n], residual output r[n], and final prediction y[n] = ymain[n] + r[n]. MSE loss is minimized via Adam (lr = 1 × 10−4) with gradient clipping. Training stops when validation loss stagnates for 20 consecutive epochs, restoring the best weights.
2.4.3. Stage 3: Online inference
A circular buffer of length K maintains the history window. For each new input u[n], the buffer contents {u[n − K], …, u[n − 1]} are fed into the model to compute y[n] = ymain[n] + r[n], then the oldest value is discarded and u[n] appended. Latency is bounded by a single forward pass, meeting real-time requirements while maintaining strict causality.
3. Experiment design and implementation
To systematically validate the proposed causal FIR backbone + nonlinear residual method for transfer path analysis, this section designs a comprehensive test protocol covering the experimental system, data acquisition, comparison baselines, evaluation metrics, and implementation details.
3.1. Experimental system and operating environment
3.1.1. Test system and acquisition chain
The experimental setup is a two-stage vibration isolation test bench under complex excitation, consisting of 8 PBE-25 rubber isolation elements and 2 × 50 kg mass blocks arranged in two layers. Bottom-layer isolators operate near rated load and upper-layer at approximately 50% load, giving the system both typical isolation stiffness and mild amplitude-dependent nonlinearity. A signal generator and power amplifier drive an electric shaker at the center of the upper mass block. Force and acceleration sensors are synchronously sampled at 2048 Hz via a 24-bit front-end in the 5–400 Hz band. The overall schematic is shown in Figure 4. Experimental bench and acquisition system.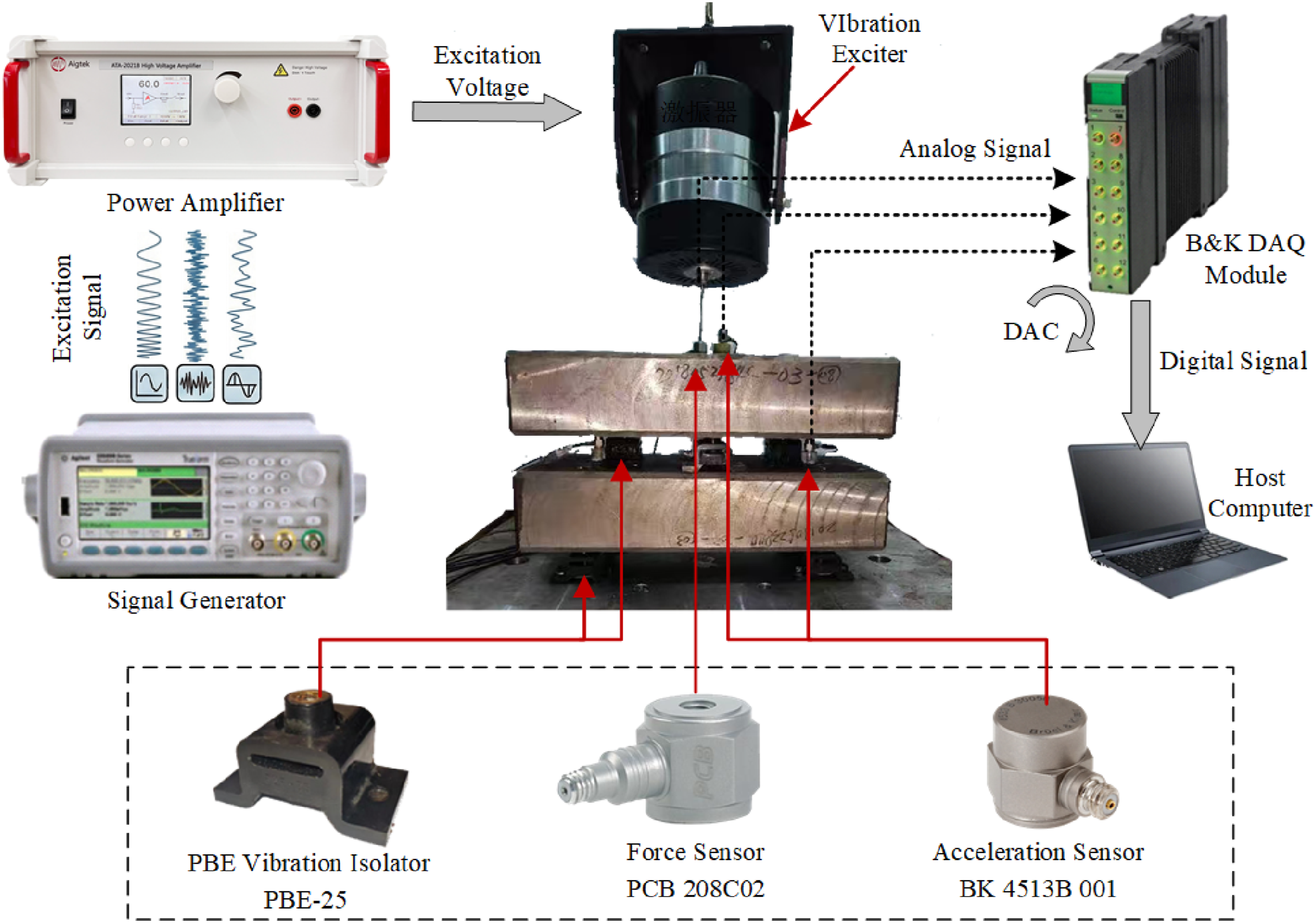
3.1.2. Data acquisition and sample composition
The bench uses 1 force sensor (at the shaker head) and 2 acceleration sensors (at the excitation base and the second-layer isolator foot).
Dataset composition and operating conditions summary.

Sweep data (12 of 40 groups, selected via endpoint-enhanced Van der Corput sequences as described in following text) is used for training/validation; band-limited noise and colored noise are entirely independent test sets with no condition-level overlap. Training/validation is randomly partitioned at block level within the sweep set (80%/20%, seed 42).
3.1.3. Algorithm operating environment
Algorithm runtime environment and software versions.
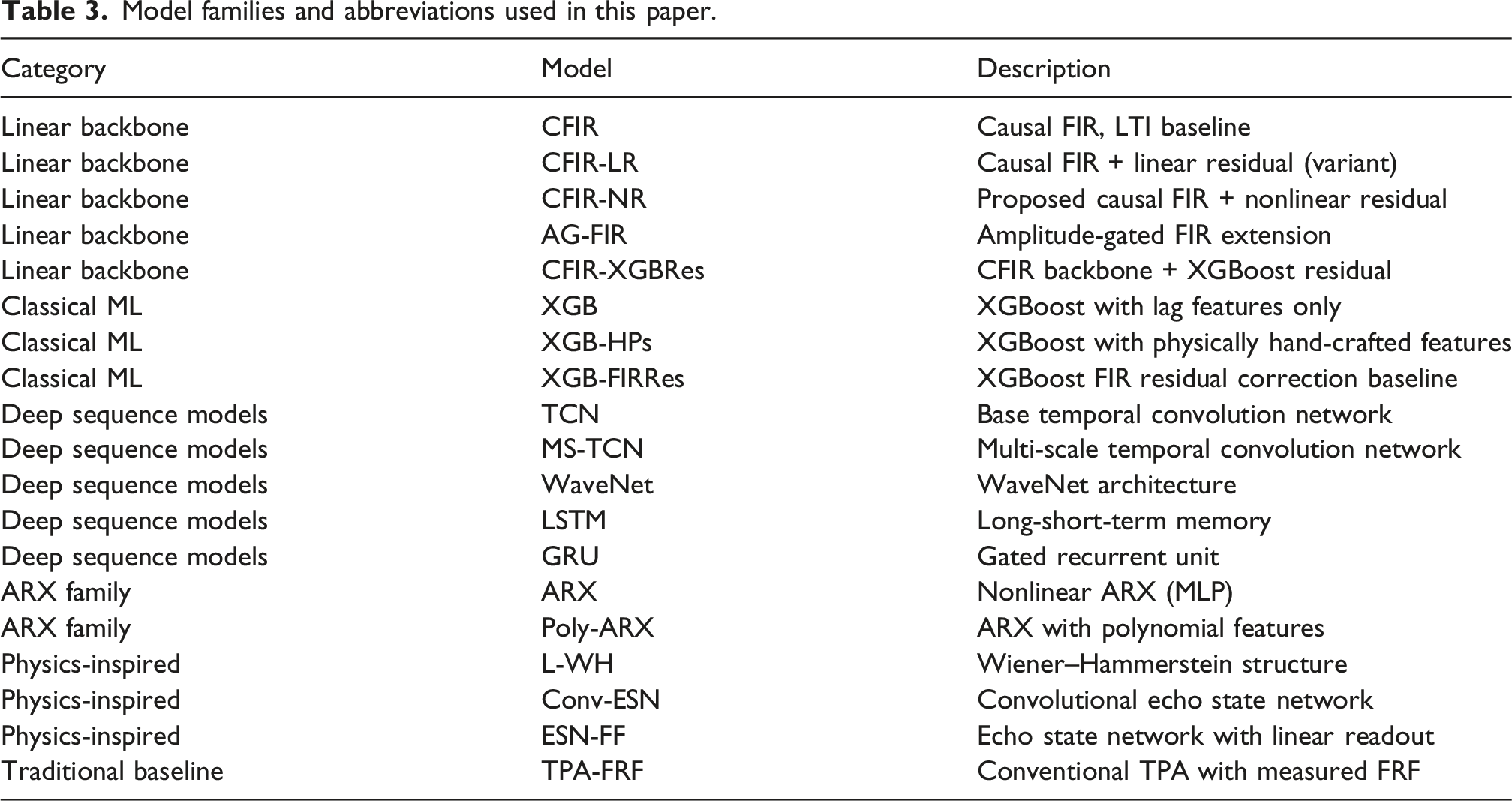
3.2. Comparison baseline models
The comparison covers six categories: conventional TPA, linear/time-varying linear, classical ML, deep sequence, ARX series, and physics-inspired models, alongside ablation within the FIR family.
Model families and abbreviations used in this paper.
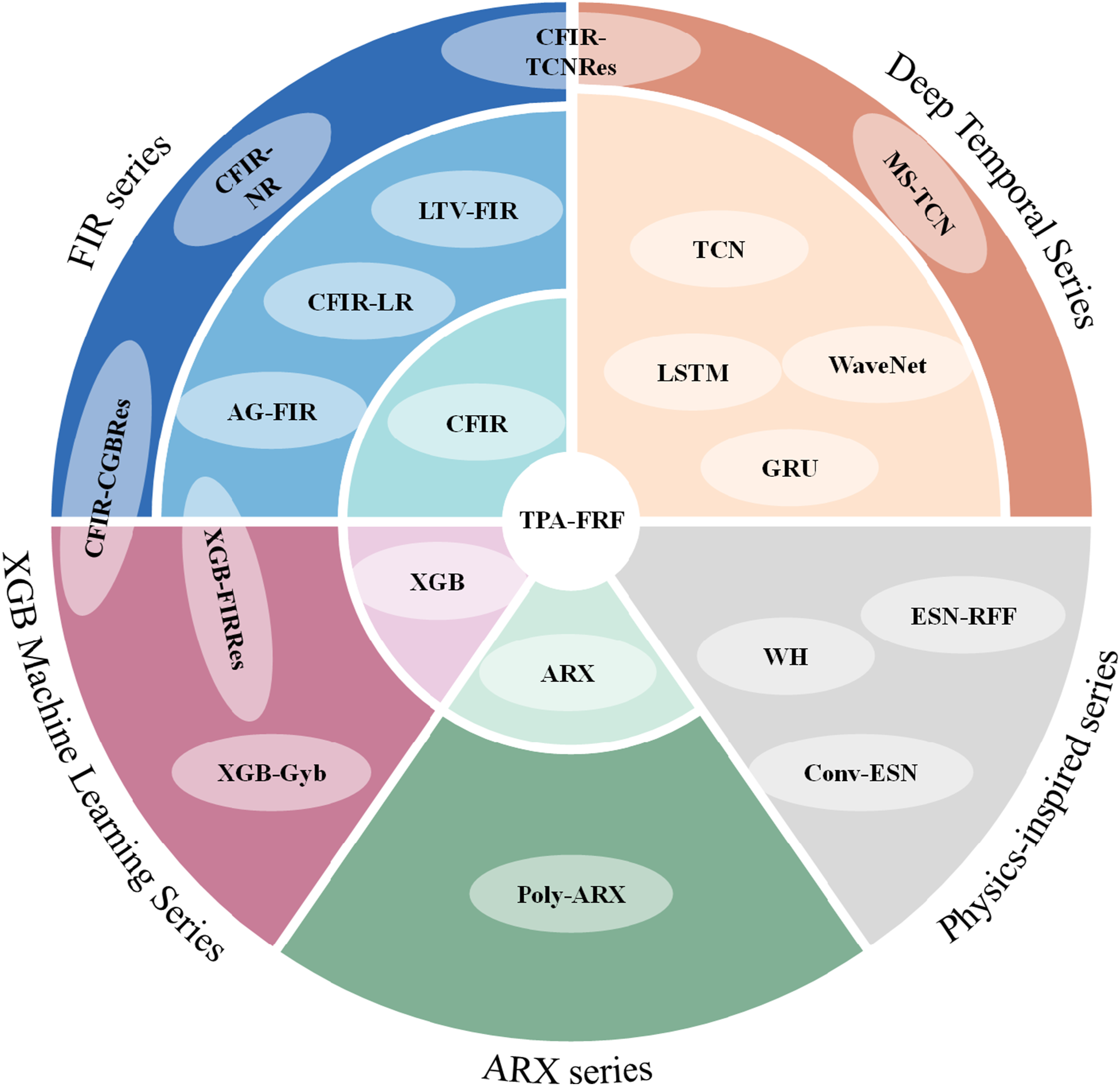
Model genealogy.
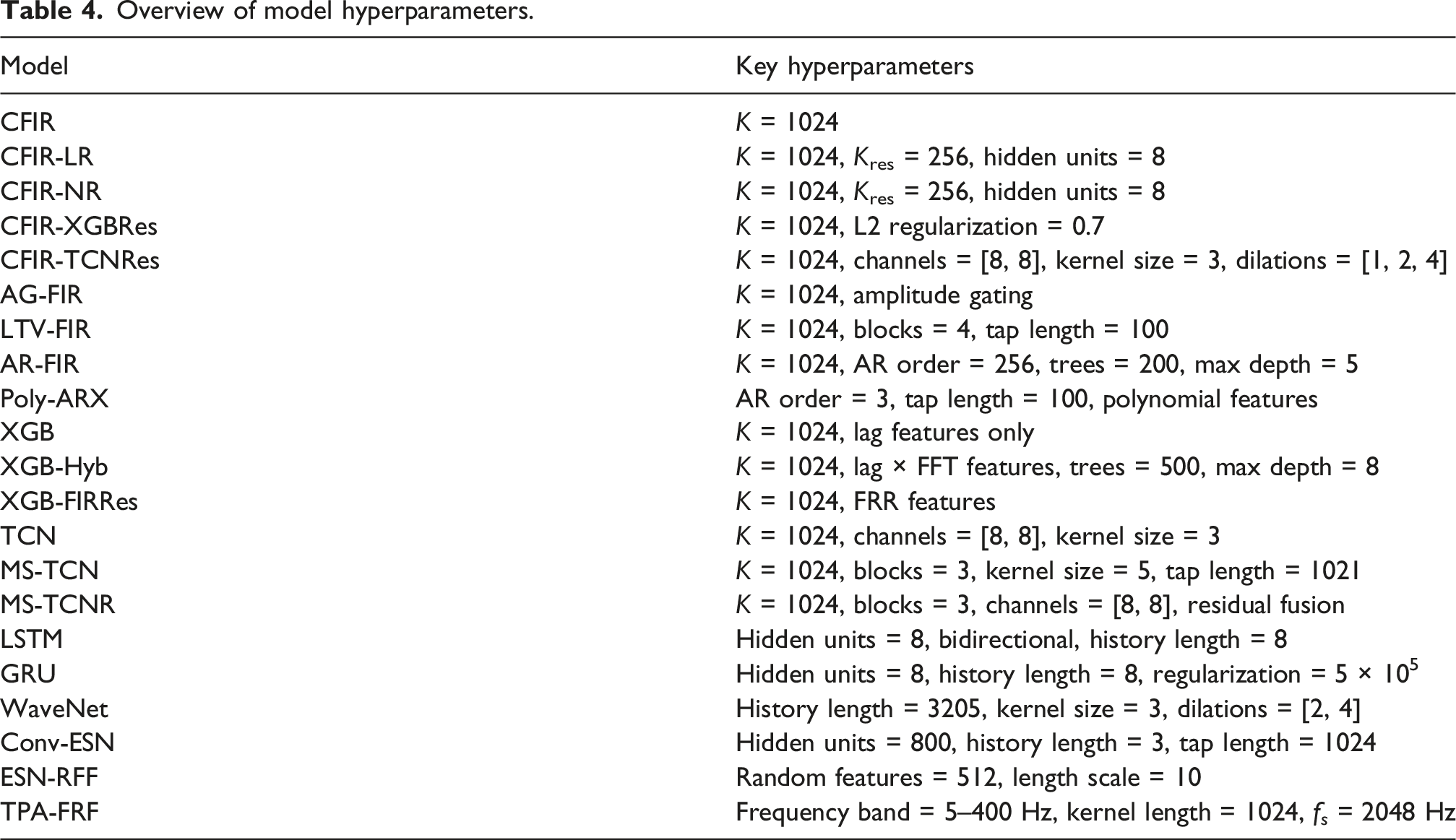
Overview of model hyperparameters.
These baselines and CFIR-NR span three modeling paradigms. Black-box models (TCN, LSTM, XGBoost, etc.) learn end-to-end mappings without structural constraints, offering strong expressivity at the cost of interpretability. Semi-physical models (ARX, WH, Conv-ESN) embed partial priors through parameterized structures, with flexibility bounded by the predefined form. CFIR-NR belongs to the gray-box category, distinguished by: (1) explicit linear/nonlinear decomposition where backbone coefficients directly correspond to impulse responses; (2) dual constraints of strict causality and decomposability, ensuring physical realizability and streaming inference; and (3) targeting systems where dominant linear dynamics coexist with weak nonlinearity requiring interpretable real-time deployment.
All models use the same data block length and stride (block_len = 2048, block_stride = 1024), with history window K = 1024. Training strategy is as follows: optimizer uses Adam with initial learning rate lr = 1 × 10−4 and weight decay 1 × 10−4. Learning rate scheduling uses ReduceLROnPlateau with decay factor 0.5 and patience 10 epochs when validation loss stops decreasing. Maximum training epochs is 300 with batch size 64. Automatic mixed precision (AMP) is enabled to accelerate training and save memory, with global gradient clipping (threshold 1.0) to prevent gradient explosion. Early stopping: stop training when validation loss does not decrease for 20 consecutive epochs and restore the best model weights. Model weight initialization strategy: convolution kernel weights and biases of FIR backbone and residual are initialized to zero, as are MLP residual weights and biases, making the initial model closer to pure linear FIR, beneficial for training stability. All random operations (data block random permutation, model weight initialization, etc.) use fixed random seed 42 to ensure reproducibility. Unless otherwise specified, other comparison models execute the same training strategy and data partitioning to ensure reproducibility and fair comparison.
3.3. Evaluation metric system
The evaluation system covers three dimensions: time domain, frequency domain, and prediction efficiency, with a total of 6 core metrics. Time-domain metrics are based on global aggregation, concatenating valid prediction points from all windows and computing uniformly, reflecting overall time-domain prediction error and goodness of fit. Frequency-domain metrics are based on window-level statistics, computed independently for each window then averaged, reflecting average levels of band total energy error and spectral shape similarity. Prediction efficiency metrics are based on total prediction time and total prediction counts across three sample sets, reflecting model prediction speed.



The final metric is the mean of |ΔLband| across all windows. Smaller values are better, reflecting the average level of total energy prediction error within the band.

Frequency-domain metric computation is based on windowed power spectral density estimation, with window size of 2048 samples and stride of 1024 samples, using Hanning window function to reduce spectral leakage.

4. Experiments and results
This chapter evaluates the proposed CFIR-NR method against conventional TPA methods and various baseline methods across three dimensions: time-domain accuracy, frequency-domain accuracy, and prediction efficiency, based on actual system independent test data. Figure 6 shows the comprehensive performance of 21 methods including the proposed method on 5 key metrics. The analysis follows a two-tier structure: Section 4.1 provides cross-framework comparison across 6 methodological families; Section 4.2 focuses on the FIR series for ablation and architecture analysis to justify design choices. Quantitative performance comparison: (a) time-domain MSE, (b) time-domain R2, (c) |ΔLband| (dB), (d) Spectrum convergence SCdB, (e) Prediction speed per 10k times.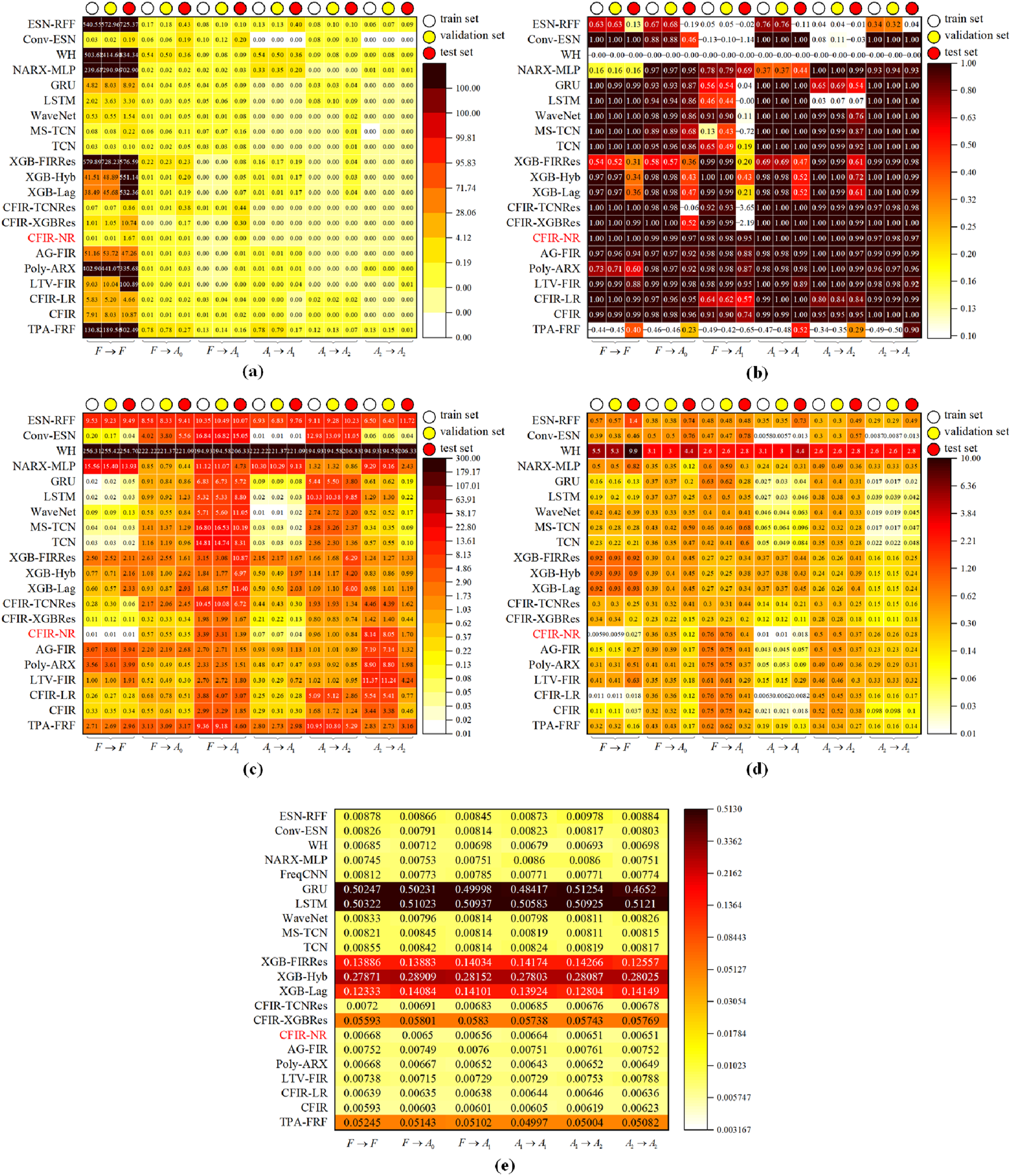
4.1. Comprehensive performance comparison and analysis
Figure 6 compares all methods across five metrics. TPA-FRF achieves acceptable frequency-domain accuracy but poor time-domain metrics, as FRF phase errors amplify during inverse transform De Sitter et al. (2010); De Klerk and Ossipov (2010). Classical ML methods (XGB variants) compete on speed but lag in accuracy. Deep sequence models (TCN, LSTM, etc.) reach top accuracy levels but suffer high latency and unstable cross-point predictions due to gradient instability under large magnitude differences. The ARX family offers medium accuracy-speed trade-offs. Physics-inspired models show large internal variation. The linear backbone series achieves the best accuracy-efficiency balance, with CFIR-NR reaching near-optimal levels across all metrics while maintaining speed comparable to linear baselines.
4.2. Ablation and architecture analysis
This section systematically analyzes the CFIR-NR architecture from two dimensions: first, cross-framework backbone and residual design ablation, then focusing on the architectural parameter selection of the CFIR-NR scheme itself.
4.2.1. Backbone and residual design ablation
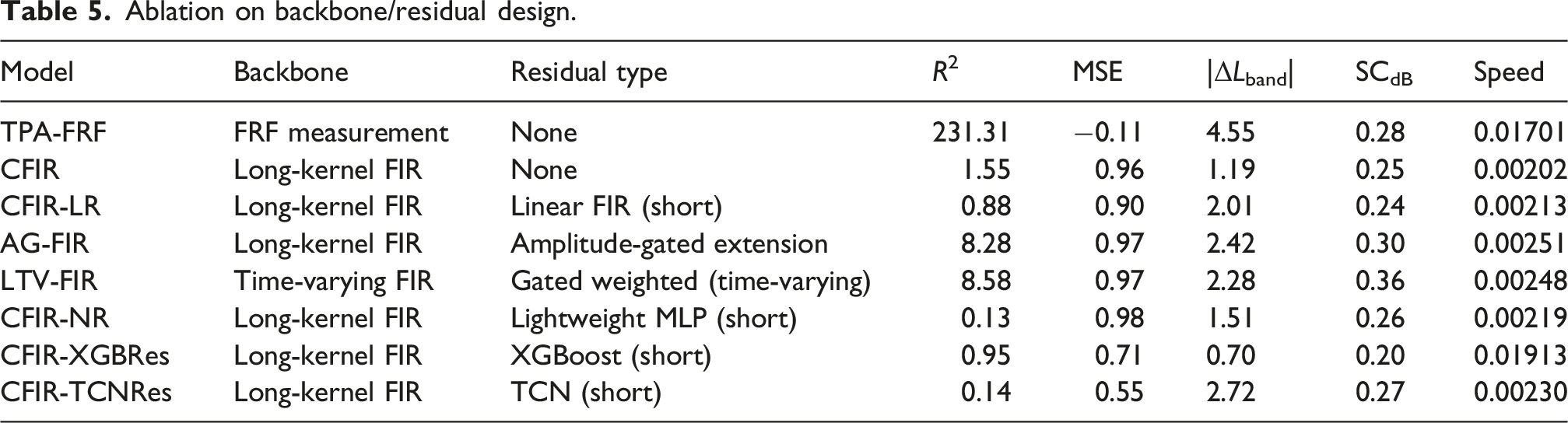
To highlight the effects of FIR series and conventional TPA methods on various components and variant designs, this section conducts ablation comparison in a “by series - by variant” manner, focusing on covering TPA-FRF and FIR series. Analysis is based on the five metrics of Figure 6, discussing only relative levels without introducing external data.
Ablation on backbone/residual design.
4.2.2. CFIR-NR architecture parameter analysis
The complete implementation configuration of CFIR-NR is as follows. Network structure: backbone FIR kernel length K = 1024, residual FIR kernel length Kres = 256, MLP with two-layer 1 × 1 convolution (hidden dimension 8, ReLU activation), total model parameters approximately 1.3 K. Training configuration: Adam optimizer (learning rate 1 × 10−4, weight decay 1 × 10−4), batch size 64, maximum 300 epochs, early stopping patience 20, gradient clipping threshold 1.0, zero initialization of all weights so that the model starts training from pure linear FIR behavior. Under this configuration, single inference latency is approximately 0.3 ms, meeting the real-time streaming deployment requirement at 2048 Hz sampling rate. The rationale for each key parameter is demonstrated through the following ablation experiments.
This section focuses on the architectural parameter selection of the CFIR-NR scheme itself, sequentially examining FIR kernel length, precision cost of causal constraints, activation function comparison, multi-scale structure comparison, and prediction robustness under noise and transient disturbances.
4.2.2.1. FIR kernel length selection
FIR kernel length scanning experiment results (SELF test set).

When K increases from 256 to 1024, the R2 of cross-point mappings significantly improves from 0.9530 and 0.7187 to 0.9750 and 0.9536, respectively. When K continues to increase to 2048, R2 further improves to 0.9861 and 0.9611, but the improvement margin significantly narrows. At K = 4096, accuracy decreases instead, indicating that excessively long memory windows may introduce redundant information. In terms of parameter efficiency, when K increases from 1024 to 2048, the parameter count increases from 0.001 M to 0.002 M, a relative increase of approximately 77%, but the absolute increment is only 0.001 M, and the inference latency difference is also within 0.1–0.2 ms. Nevertheless, K = 1024 is selected, which already meets the prediction requirements of the current test system. Notably, this phenomenon reveals a practical pattern: when sampling rate increases to capture higher-frequency features, K can be proportionally increased to maintain the same physical time window, with limited computational overhead increase while ensuring accuracy.
4.2.2.2. Precision cost of causal constraints
Comparison between causal and non-causal variants (SELF test set).
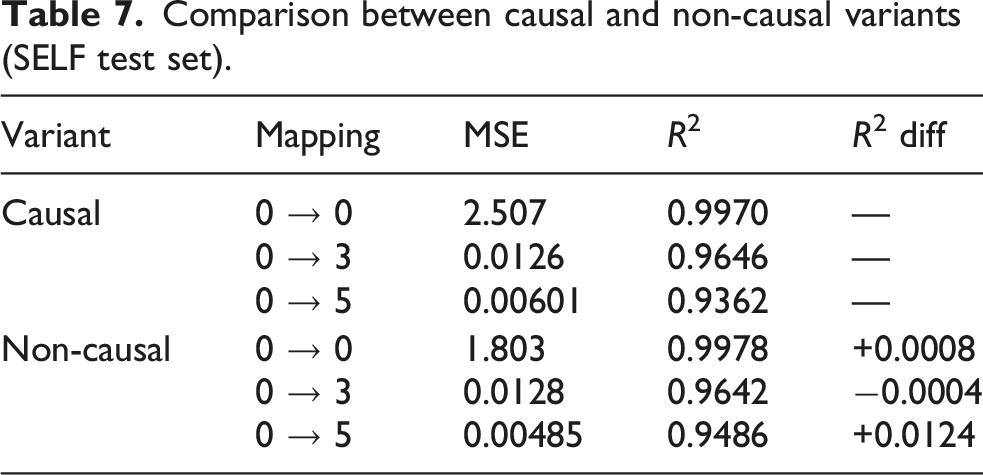
The precision loss due to causal constraints is minimal: the R2 difference on self-mapping (0 → 0) is only 0.0008, on cross-point mapping the causal version even slightly outperforms the non-causal version, and the difference on 0 → 5 mapping is 0.0124, all within the statistical noise level. This result stems from the highly over-sampled nature of low-frequency vibration signals at 2048 Hz sampling rate, where the causal FIR’s 1024-point memory window (0.5 s) has already captured almost all prediction-relevant information. The causal version possesses irreplaceable engineering advantages: supporting sample-by-sample real-time streaming inference, validating the rationality of CFIR-NR’s causal design choice.
4.2.2.3. Activation function and multi-scale structure
Activation function comparison experiment results (SELF test set).
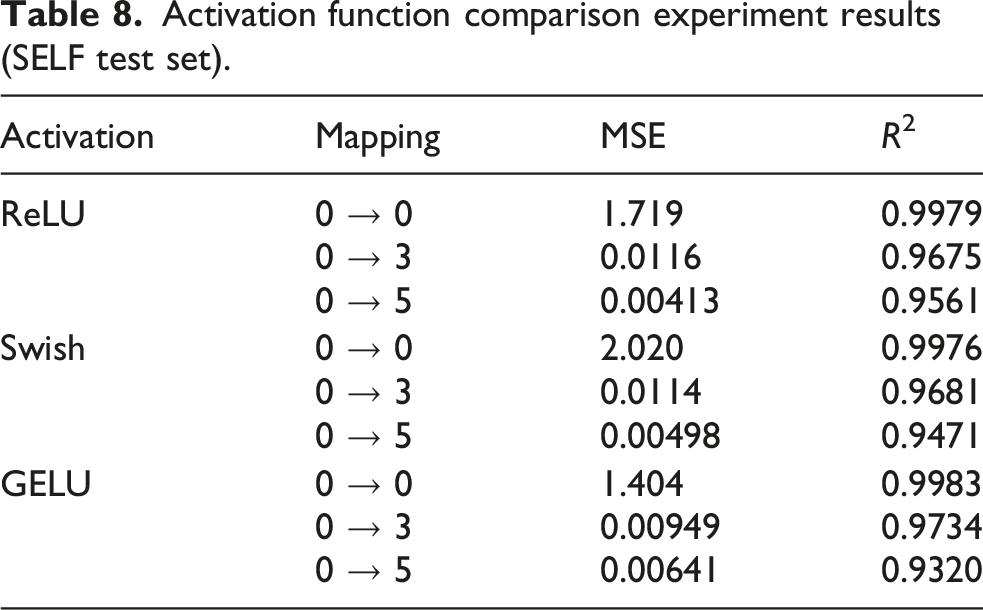
The three activation functions perform similarly across all mappings, with a maximum R2 difference of approximately 0.006, within the statistical noise level. In point-wise nonlinear scenarios (Conv1d(1,1)), activation function differences are significantly attenuated by linear projections, and ReLU is completely sufficient in the current architecture.
4.2.2.4. Multi-scale structure comparison
Multi-scale structure comparison results (SELF test set).
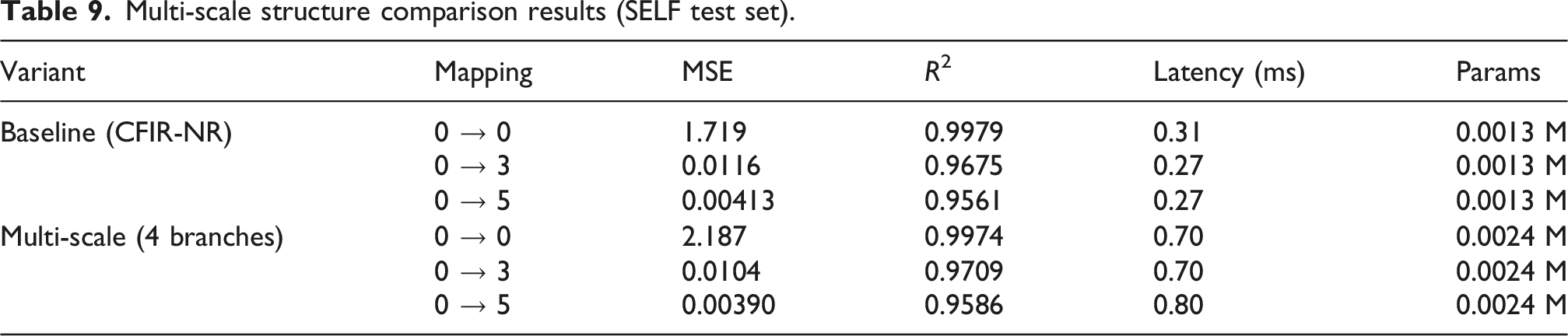
The multi-scale variant yields less than 0.005 R2 improvement on both cross-mapping pairs, while increasing inference latency by 2–3× and nearly doubling the parameter count. The limited improvement stems from CFIR-NR’s existing dual-branch design already possessing implicit multi-scale capability: Kmain = 1024 covers long-range dependencies (0.5 s), Kres = 256 covers mid-range features (0.125 s), and the point-wise MLP captures instantaneous nonlinearities, making explicit multi-scale branches redundant. Therefore, the original CFIR-NR architecture is retained.
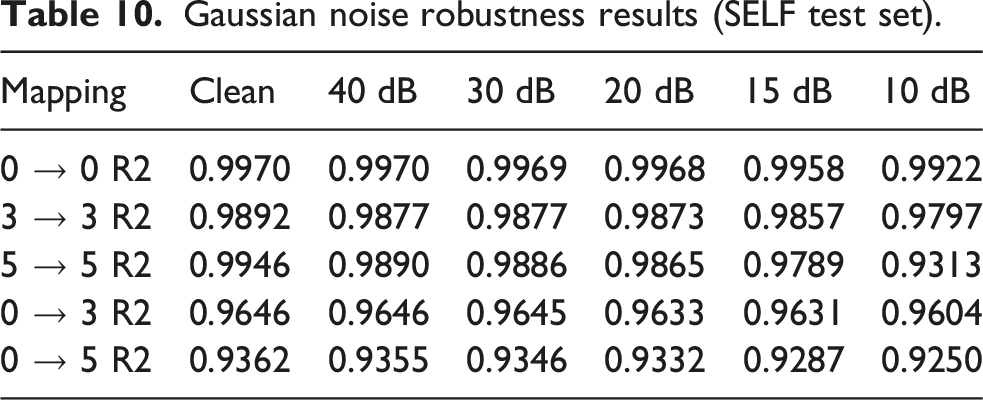
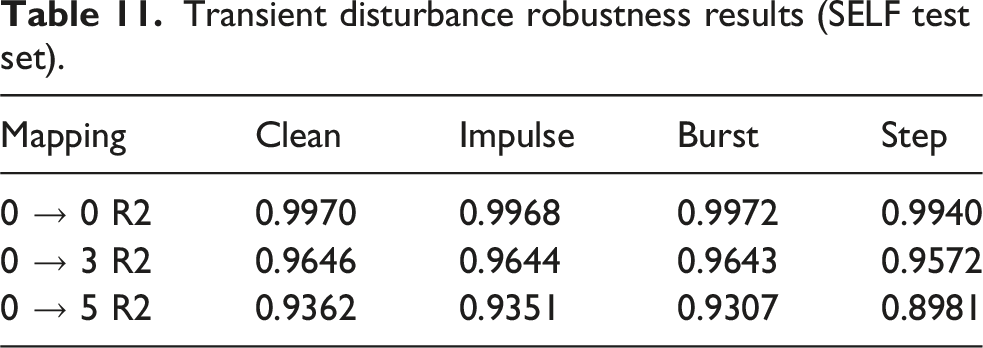
4.2.3. Robustness to noise and transient disturbances
To evaluate the prediction stability of CFIR-NR under non-ideal conditions, two types of robustness test samples were constructed based on the SELF test set. (1) Gaussian noise test: i.i.d. Gaussian white noise was scaled to target SNR levels and superimposed onto the input channels, simulating sensor noise and electromagnetic interference, with five SNR levels: 10, 15, 20, 30, and 40 dB. (2) Transient disturbance test: three types of typical transient disturbances were artificially injected into input channels—Impulse (single-sample amplitude jump to 50% of full scale), Burst (100-point sinusoidal oscillation at 3× signal RMS), and Step (DC level step shift to 20% of full scale), simulating on-site abrupt loads and impact conditions.
Gaussian noise robustness results (SELF test set).
Transient disturbance robustness results (SELF test set).
4.3. Sweep condition increment design and training
All previous model training results are based on the specified 12 sweep samples. Since this paper aims to achieve complex excitation prediction through extrapolation from limited discrete sweep conditions, this section discusses the impact of different sweep condition selections on prediction effects under the same model architecture and hyperparameter settings. Since excitation amplitude becomes the only experimental design variable in sweep tests, and precise excitation force magnitude cannot be directly set in actual tests, this experiment uses quantifiable signal generator excitation signal peak-to-peak values to control excitation force magnitude.
This research models the experimental parameter problem as a low-discrepancy sequence sampling problem in a one-dimensional interval, using endpoint-enhanced Van der Corput sequences for experimental condition design. The core principle of Van der Corput sequences is as follows:
For a positive integer i, convert to base-b representation
Then the digits of i’s base-b expression can form an array: a0(i), a1(i), …, aM−1(i). A sequence of real numbers in the [0, 1) interval can be obtained through the following computation
The Φ
b
(i) sequence obtained here is the Van der Corput sequence. Since in actual testing, background noise testing under no excitation and maximum excitation amplitude testing will be conducted first, these two tests are endpoint conditions of the experimental test, corresponding to 0 and 1 in the normalized sequence. Therefore, the endpoint-enhanced Van der Corput sequence supplements the maximum condition in the first sequence, extending the sampling space of the classical Van der Corput sequence from [0, 1) to [0, 1]. The variation pattern of this sequence with sample count is shown in Figure 7. Define the initial combination as background noise testing and maximum excitation testing as 0% and 100% on the left axis. On the basis of the initial combination, each added condition is generated through base-2 Van der Corput sequence and marked with red dots as newly inserted conditions, forming new condition combinations. This design evenly covers the excitation amplitude range. Endpoint-enhanced Van der Corput sequence condition combination and prediction performance.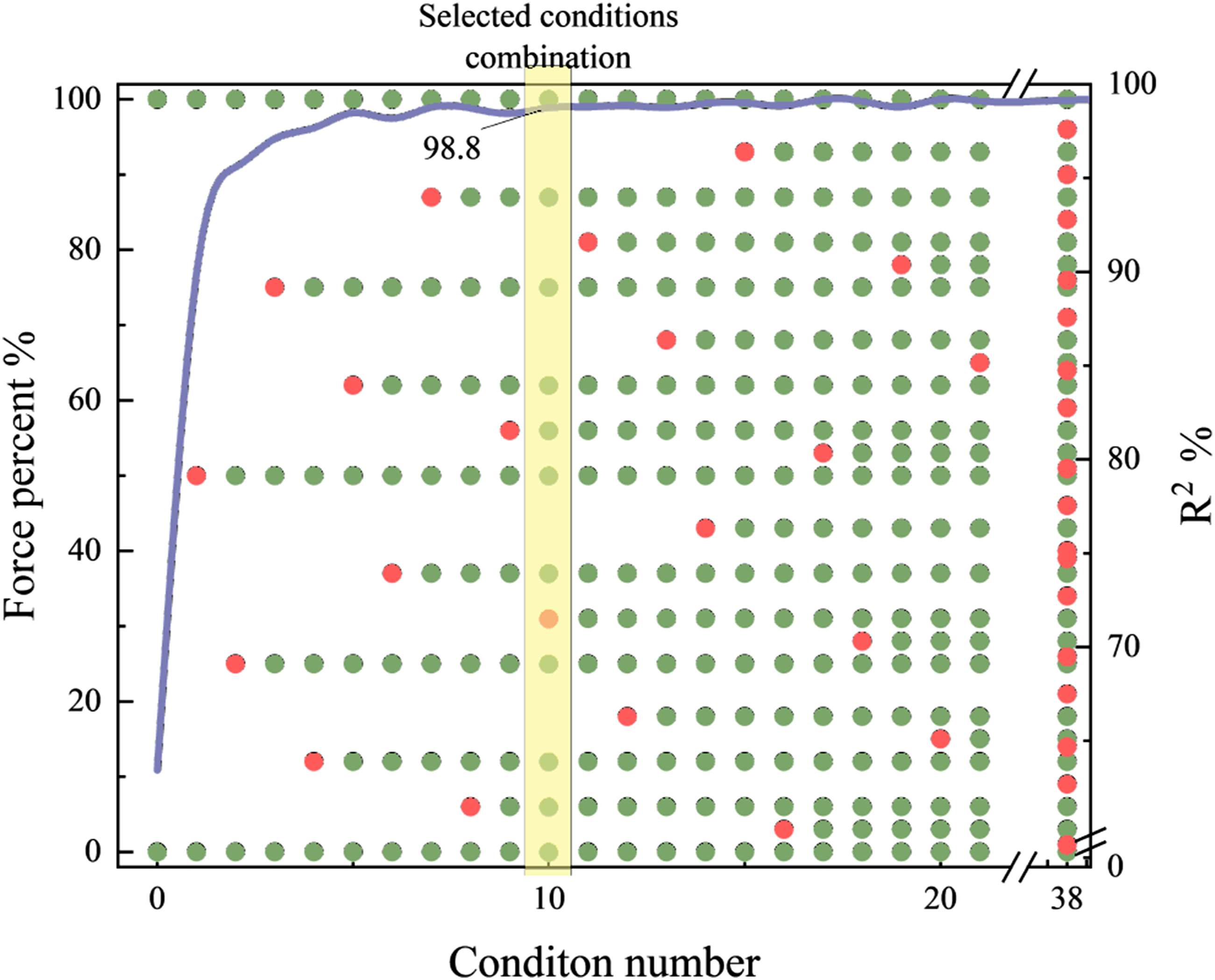
To compare the prediction performance across condition combinations, this section computes a weighted average of the time-domain R2 metrics across all mappings. The resulting R2 values are shown as a line chart on the right axis of Figure 7. As the number of conditions increases, the R2 metric improves rapidly and stabilizes. From the tenth condition group onward, R2 remains above 0.98. Considering test costs and prediction efficiency, 12 condition groups (10 supplementary plus 2 endpoint groups) are sufficient for this test subject.
This section systematically studies the impact of training sample size on model performance through endpoint-enhanced Van der Corput sequences. Experimental results show that only approximately 12 discrete sweep conditions are needed for the model to reach stable levels in time-domain prediction accuracy (R2 ≥ 0.98), validating the core innovation conclusion proposed earlier that “limited discrete sweep conditions can extrapolate to complex excitation prediction.” This finding further proves the cost-effectiveness advantage of the CFIR-NR method in engineering applications. Through low-discrepancy sequence sampling strategy, accurate prediction of complex excitations such as tonal lines superimposed on band-limited random can be achieved while significantly reducing experimental costs, providing quantitative basis for engineering deployment of data-driven TPA.
4.3.1. Prediction effect visualization
To intuitively demonstrate the prediction effects of the CFIR-NR method in actual system signal mapping solution, this section compares time-domain waveforms and frequency-domain spectra to show the mapping prediction situations of the CFIR-NR method under different excitation conditions. Figures 8 through 11 show the comparison between prediction results and true responses. Sweep excitation conditions are validation set data, broadband noise excitation and colored noise excitation conditions are test set data. The two colored noise excitation sets select two typical characteristics: multiple strong tonal lines and band-limited random components superimposed with tonal lines. Mapping prediction of sweep frequency excitation.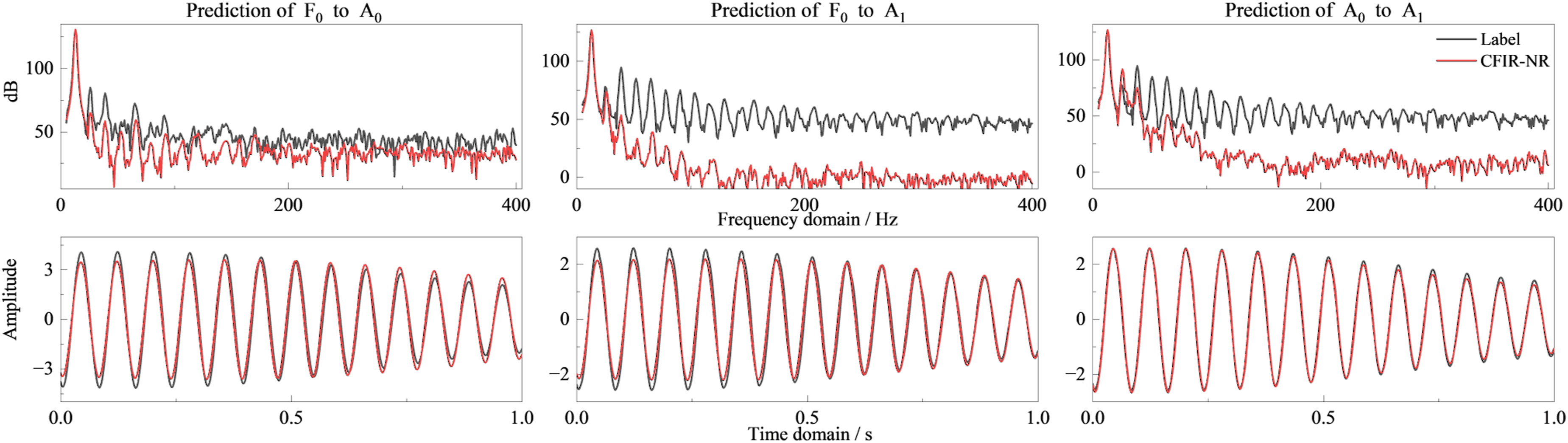
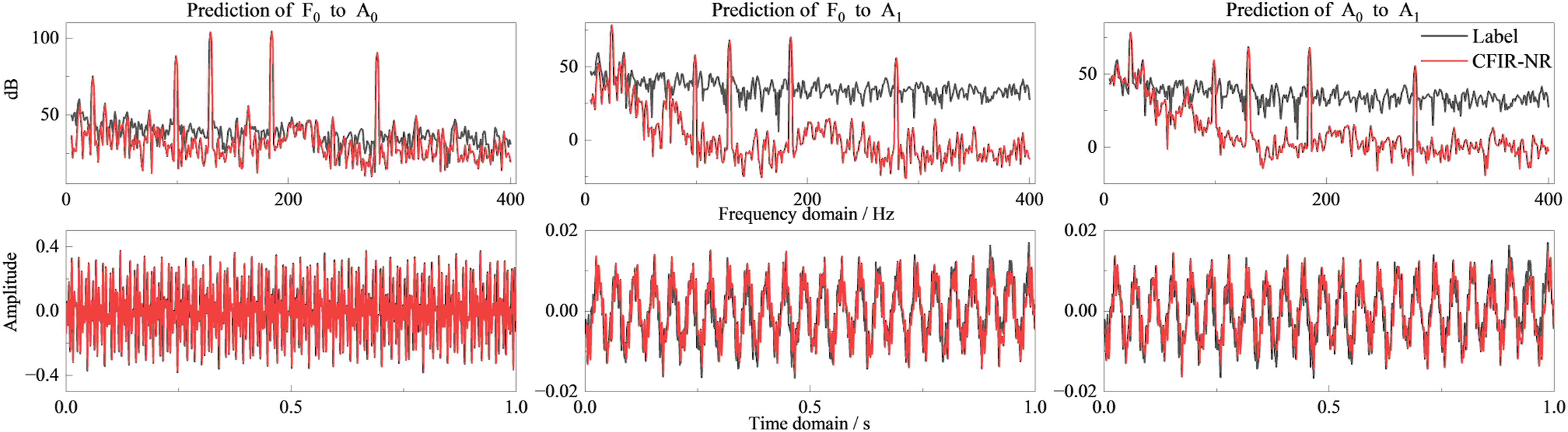
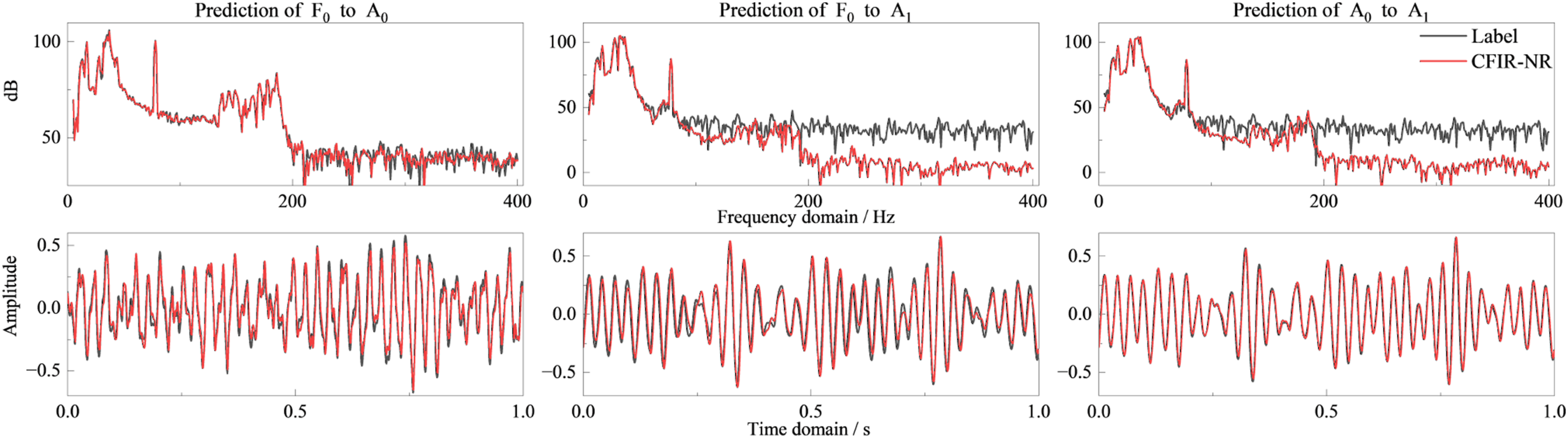
Overall, the CFIR-NR method shows consistency across three types of conditions and three typical mapping pairs (F0 → A1, F0 → A0, A0 → A1): (1) Sweep conditions (Figure 8). In the time domain, prediction results and measured values are basically accurately regressed. In the frequency domain, peak frequencies and amplitudes are aligned with measurements, with deviations in weak signal frequency bands but not affecting overall prediction effectiveness. (2) Broadband noise conditions (Figure 9). Time-domain signal prediction effects are still good, with minor deviations in some spikes and glitches, but frequency-domain supplementary evidence can prove high prediction accuracy. (3) Colored noise conditions (Figures 10 and 11). Under the compound background of “tonal lines + band-limited random,” time-domain prediction waveforms remain stable, and discrete tonal lines and prominent band-limited random components are accurately predicted in the frequency domain.
In summary, CFIR-NR can stably reconstruct signal mapping relationships under complex conditions containing strong tonal lines, band-limited random signals, and their mixtures. Frequency-domain errors are concentrated in low-energy regions, with minimal impact on metrics such as band total level and spectral similarity. CFIR-NR learns the essential physical transfer characteristics of the system rather than mechanically memorizing the output signal including background noise. Therefore, in this test condition where the excitation energy is concentrated in the tonal components, the model accurately reproduces the transfer characteristics in tonal regions, while in low-energy bands dominated by sensor background noise, the prediction reflects the system’s underlying transfer level rather than following the noise floor. Mapping prediction of broadband noise excitation. Mapping prediction of colored noise excitation set 1. Mapping prediction of colored noise excitation set 2.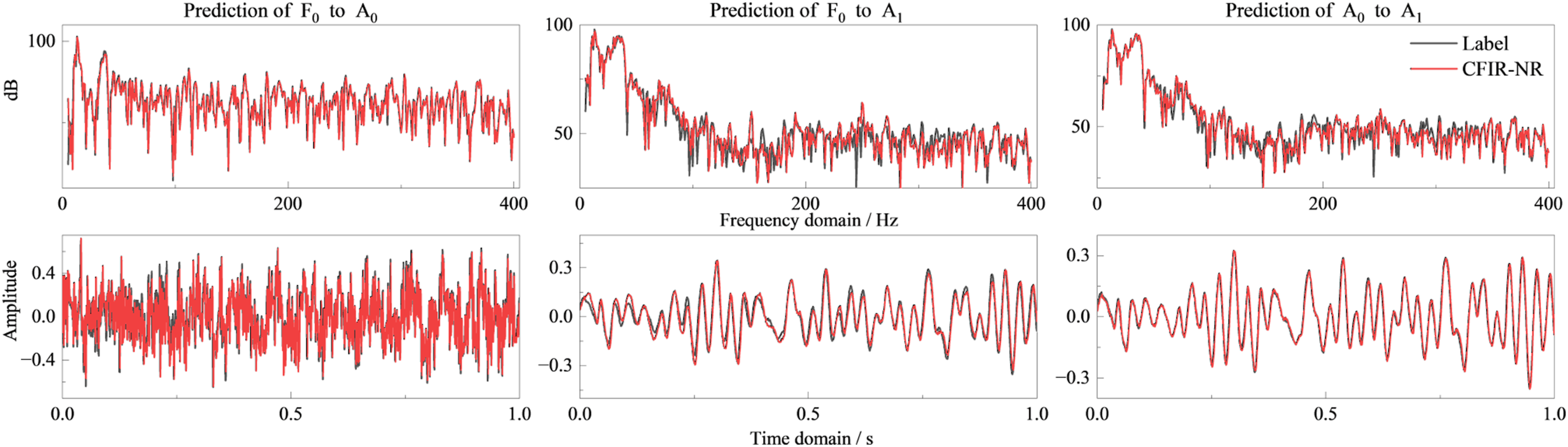
4.3.2. Further discussion on transfer characteristics affected by excitation characteristics
The literature Richards and Singh (2001) proposes that isolation element vibration transfer characteristics are affected by excitation characteristics, with resonance peak characteristics showing certain differences under different excitation amplitudes and forward/reverse sweep excitation directions, thereby affecting the entire system’s vibration transfer. This literature only uses a binomial method to fit isolation element characteristics based on experimental data. In contrast, based on the CFIR-NR model trained on real experimental data from Section 3, this section replaces the input with generated virtual excitation signals to qualitatively and quantitatively study these subtle nonlinear factors from a data-model perspective, while further validating the data model’s fitting capability for such weak nonlinear factors.
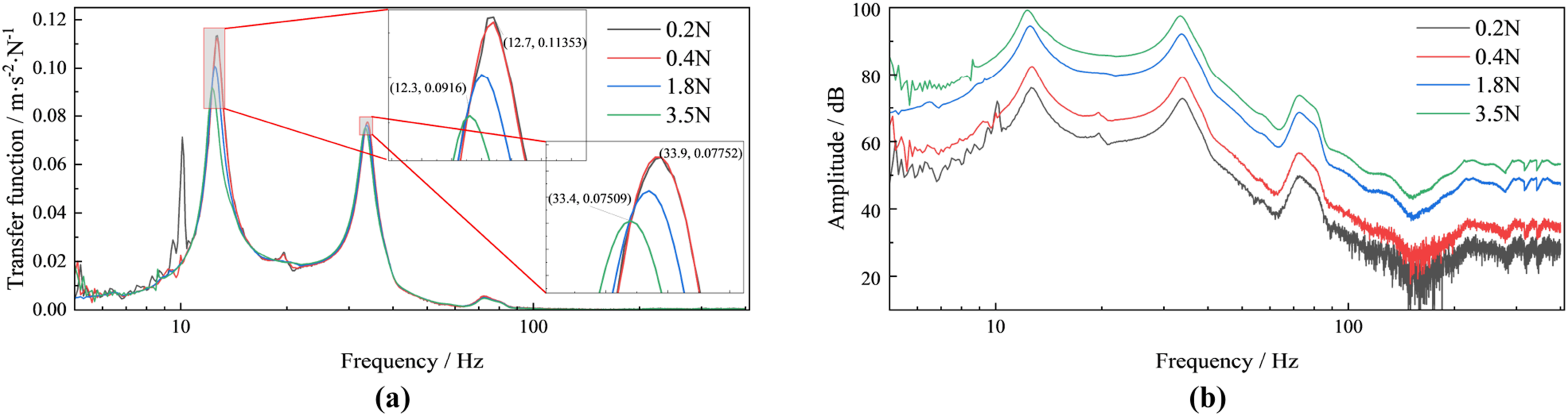
This paper uses generated virtual excitation signals as model inputs, generates sweep signals of different peak-to-peak values, and generates reverse sweep signals for one group of signals. After energy statistics, the four groups of sweep signals with different amplitudes have excitation force magnitudes of 0.2 N, 0.4 N, 1.8 N, and 3.5 N in the 5–400 Hz range.
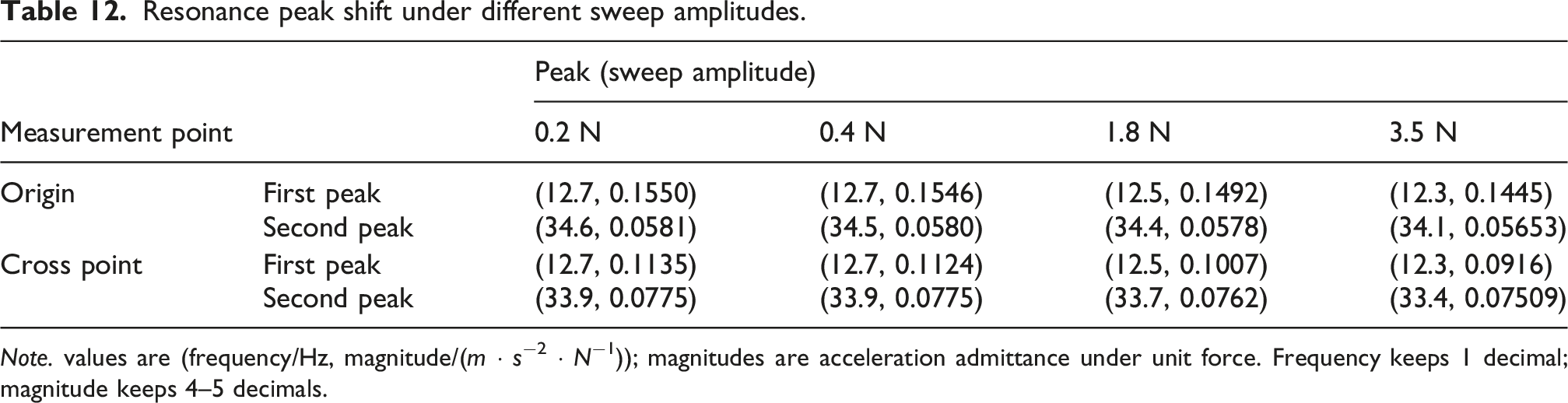
First, input time-domain signals with different peak-to-peak values into the data model to solve responses. From the zoomed views (Figures 12 and 13), it can be clearly seen that as excitation force increases, the first resonance peak of the origin transfer function drifts 0.4 Hz toward lower frequencies and the receptance attenuates by 6.8%, while the second resonance peak drifts 0.5 Hz toward lower frequencies and the receptance attenuates by 2.7%. For cross-point transfer function, the first resonance peak drifts 0.4 Hz toward lower frequencies and the receptance attenuates by 19.3%, while the second resonance peak drifts 0.5 Hz toward lower frequencies and the receptance attenuates by 3.1%. Detailed values are shown in Table 12. Effect of sweep amplitude on origin transfer function and response: (a) origin transfer function; (b) origin response. Effect of sweep amplitude on cross point transfer function and response: (a) cross point transfer function; (b) cross point response. Resonance peak shift under different sweep amplitudes. Note. values are (frequency/Hz, magnitude/(m ⋅ s−2 ⋅ N−1)); magnitudes are acceleration admittance under unit force. Frequency keeps 1 decimal; magnitude keeps 4–5 decimals.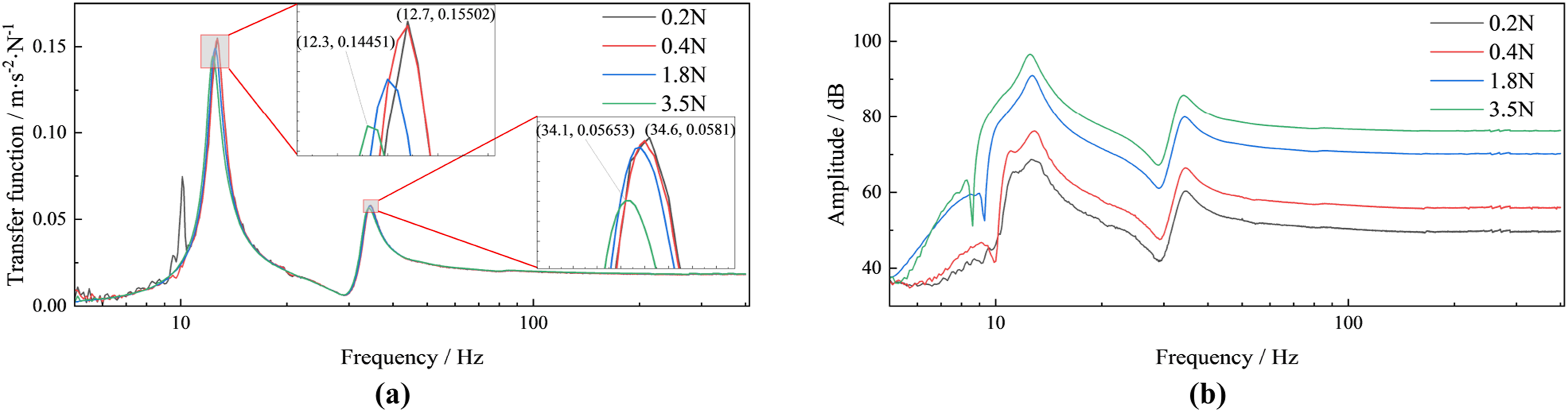
Second, with fixed peak-to-peak values and excitation force magnitude of 3.5 N, virtual forward and reverse sweep excitation signals are input into the model separately. Origin and cross-point spectral response characteristics are not obvious, so only transfer function comparison curves are shown. According to model prediction, reverse sweep causes the two resonance peaks of both points to shift to higher frequencies by a very small amount, with amplitude changes basically negligible. Detailed data is shown in Figure 14. Influence of sweep direction on transfer function: (a) Origin transmission, (b) cross point transmission.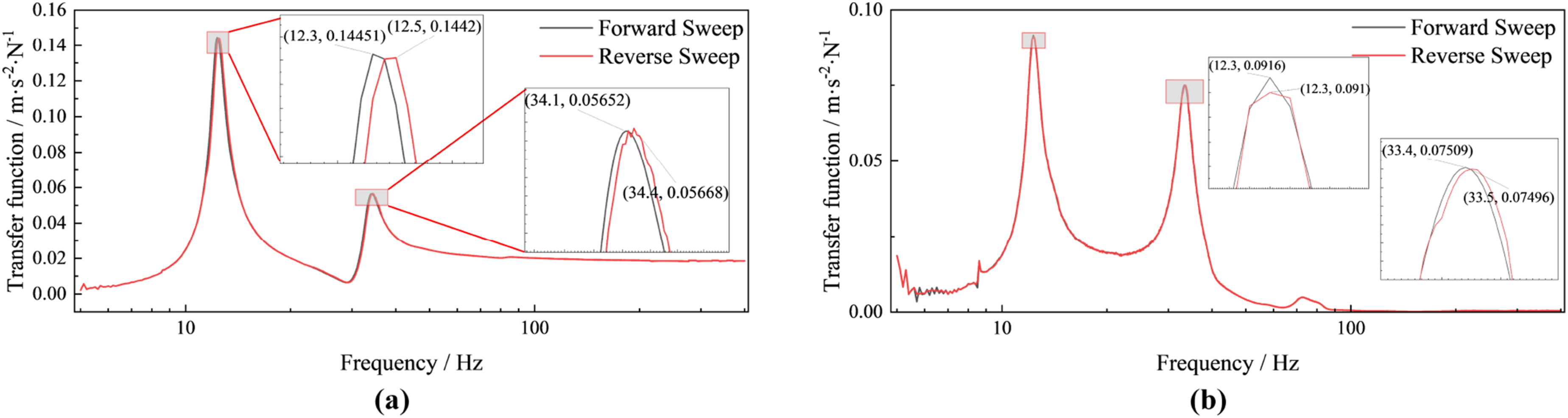
In summary, this data model has learned the slight nonlinear effects on isolation systems caused by excitation characteristic changes, validating nonlinear phenomena mentioned in previous literature and proposing a quantitative analysis method for virtual signals based on data models. Although this nonlinear effect is relatively weak in this system, actual systems will couple more nonlinear factors, where the advantages of this technology will become more prominent and increasingly important as requirements for refined vibration transfer modeling continue to tighten.
5. Conclusions
This paper presents an in-depth analysis of the systematic limitations of conventional TPA methods under complex excitation. These methods rely on explicit frequency response function measurement and matrix pseudoinversion, and face multiple challenges—noise sensitivity, ill-conditioning, and insufficient cross-frequency coupling in frequency-by-frequency processing—that make high-precision time-domain signal mapping difficult. End-to-end deep learning models, while offering considerable accuracy, are limited in practical engineering deployment by their black-box nature, high inference latency, and computational complexity. To address these issues, this paper proposes a strictly causal constrained gray-box modeling architecture combining a long-memory causal FIR backbone with a short-window nonlinear residual (CFIR-NR). This architecture establishes, for the first time, a strictly causal, single-point supervision time-domain streaming prediction framework that achieves precise modeling and efficient inference of signal mapping relationships under complex excitation without relying on explicit FRF measurement.
The core innovations of this paper’s work can be summarized in the following three points: 1. For the first time, constructs the “strictly causal + single-point supervision” CFIR-nonlinear residual structure, achieving time-domain streaming prediction of isolation system vibration transfer response. 2. Innovatively designs the “long-memory FIR backbone + short-window nonlinear residual” decomposition model, simultaneously characterizing amplitude and frequency dependence of vibration mapping, without requiring equipment disassembly and explicit FRF measurement. 3. Validates the prediction support capability of limited discrete amplitude sweep conditions for complex excitation, establishing extrapolation paths from simple conditions to engineering complex conditions.
Experimental validation demonstrates significant improvements across multiple key dimensions. Compared with 20 methods spanning conventional TPA, classical data-driven models, and advanced deep sequence models, evaluated across time-domain accuracy, frequency-domain accuracy, and prediction efficiency, CFIR-NR achieves low-frequency prediction accuracy superior or comparable to the best baseline models while maintaining inference efficiency close to linear models. Using endpoint-enhanced Van der Corput sequence-based condition design, approximately 12 discrete amplitude sweep conditions suffice to stabilize time-domain prediction accuracy to R2 ≥ 0.98, effectively supporting prediction extrapolation to complex excitations such as tonal lines superimposed on band-limited random noise. Additionally, virtual signal experiments using the trained data model quantitatively validate resonance frequency shift and receptance attenuation under varying excitation amplitudes, further confirming the model’s ability to capture weak nonlinear characteristics of the isolation system.
Although this research has achieved significant progress, there are still several limitations that need to be addressed in follow-up work. Existing methods have not systematically covered extreme non-stationary and high-noise scenarios, and robustness of multi-input multi-output coupling relationships and long-term sensor drift needs further validation. Moreover, the current offline training paradigm does not support continuous model updating with incoming data, leaving the model’s adaptability to system drift and gradual characteristic evolution over long-term operation unaddressed. Adaptive selection mechanisms and sparse strategies for FIR backbone length and residual window size have not been developed. To further improve engineering applicability and generality, future research directions mainly include: (1) Robustness enhancement for non-stationary conditions and multi-source coupling scenarios, including introduction of adaptive filtering, dynamic weight adjustment mechanisms, and recursive Bayesian estimation methods such as Kalman filtering and particle filtering for real-time parameter tracking. (2) Automatic search and optimization of FIR kernel length and residual structure based on information theory and sparsity constraints. (3) Extension from single-channel mapping to full-channel MIMO coupling modeling, combined with contribution decomposition methods such as attention mechanisms or gradient attribution to form end-to-end data-driven TPA complete closed loop, and design multi-excitation experimental platforms for systematic validation. (4) Deep integration of physical priors and Bayesian uncertainty quantification to further improve model engineering credibility and decision support capability.
Overall, CFIR-NR provides a solution for engineering deployment of data-driven TPA that balances theoretical rigor, computational efficiency, and practical usability. It does not require explicit FRF measurement or equipment disassembly, instead learning end-to-end from operational data. The time-domain streaming framework and strict causal constraints make it directly applicable to online real-time monitoring and control. The decomposed structure, while maintaining interpretability, breaks through the limitations of traditional linear models through lightweight nonlinear residual compensation. These characteristics make the CFIR-NR method promising for wide applications in vibration and noise control of complex equipment, isolation system design optimization, and online TPA monitoring.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors acknowledge the financial support of the Key Laboratory Foundation General Project (No. 6142204240305).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.