
Abstract
Under complex conditions such as varying operating conditions and strong noise interference, fault features in gear transmission systems are highly susceptible to being masked by noise, posing significant challenges to fault diagnosis techniques. To address the limitations of traditional blind deconvolution objective functions (OF), this paper proposes a novel blind deconvolution method based on maximizing the Cycle-embedded Generalized Gini Index (CGGI). The core innovation of this method lies in constructing an OF grounded in a new sparsity measure index, CGGI. By introducing a Generalized Weighted Envelope Spectrum (GWE), it effectively integrates the feature enhancement effects of signals under different transformation parameters. Furthermore, it inherits the superior capability of the Generalized Gini Index in quantifying signal impulsivity and cyclostationarity, thereby significantly improving the robustness of fault feature identification under complex operating conditions. Numerical analysis demonstrates that CGGI more effectively suppresses the influence of interference components compared to traditional indicators. Validations conducted on a public dataset of a two-stage parallel-shaft gearbox and a fault test bench for a high-speed train’s body-suspended transmission system show that the proposed method significantly outperforms traditional methods in terms of the Fault Characteristic Ratio (FCR) across various fault scenarios. This proves the effectiveness and superiority of the proposed method for condition monitoring and fault diagnosis of complex transmission systems in practical engineering applications.
Keywords
1. Introduction
Gear transmission systems, as core components of mechanical equipment, are widely used in various critical equipment to perform the important function of power transmission. Their operational status directly affects the performance, efficiency, and safety of the entire equipment.
However, gears operating under complex conditions for extended periods are highly susceptible to damage such as tooth surface wear, pitting, tooth breakage, and cracks. Factors such as varying operating conditions, changing loads, and wheel-rail interaction interference often cause gear fault characteristics to be masked by other vibration components and noise, posing challenges for fault diagnosis.
Signal processing methods have long been mainstream techniques for vibration component denoising and decomposition (Zheng et al., 2021), and have been extensively applied for efficient extraction of multi-modal information across various fields. These include Empirical Mode Decomposition (EMD) (Huang et al., 2017), Variational Mode Decomposition (VMD) (Dragomiretskiy and Zosso, 2013), and Singular Value Decomposition (SVD) (Zhao et al., 2022), among others. However, these methods often face issues like mode mixing and requirements for prior parameters. To address these limitations, researchers have improved the algorithms by integrating concepts from optimization algorithms and machine learning.
Wang et al. (Wang et al., 2020) proposed an EMD manifold (EMDM) method, which improves upon the original EMD using manifold learning to efficiently retain fault-related transient information while suppressing noise and irrelevant components. Ma et al. (2025) addressed the selection of penalty factors and the number of decomposition modes in VMD by introducing the RIMA algorithm. Liu et al. (2024) achieved motor bearing fault diagnosis using Improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (ICEEMDAN). Bagherzadeh et al. (2022) incorporated wavelet concepts into the EMD method to enhance its noise handling performance, successfully applying it to locate vibration sources within aircraft cabins. Li et al. (2025) tackled the issues of inaccurate mode decomposition and parameter selection in Symplectic Geometry Mode Decomposition (SGMD) by using dispersion entropy as a constraint for mode reconstruction and introducing a dual optimization algorithm for parameter tuning, validated on ship radiated noise type recognition and bearing fault diagnosis data.
Beyond decomposition methods, the core idea of blind deconvolution is to maximize a statistical index (the OF) of a FIR-filtered signal using classical gradient descent algorithms or eigenvector-based algorithms (optimization algorithms) (Hou et al., 2025). The choice of the OF critically determines the extraction results, prompting extensive research into its formulation.
Current research on OF primarily falls into two categories. The first involves designing OF based on time-domain features of signals, such as kurtosis (Kurt) and the Gini index (GI), which characterize the sparsity of signals in the time domain when faults occur. The second category focuses on designing OF using frequency-domain features of signals, by introducing fault characteristics into the square envelope spectrum (SES) of signals including the second-order cyclostationarity indicator (ICS2), among others. Hashim et al. (2023) proposed a blind deconvolution strategy based on spectral kurtosis and applied it to gear fault diagnosis. Wang et al. (2022) addressed the parameter optimization problem in Maximum Cyclostationarity Blind Deconvolution (CYCBD) by estimating the cyclic frequency set using the morphological envelope autocorrelation function and adaptively selecting the filter length via an equal-step search strategy, demonstrating its effectiveness for bearing fault diagnosis through simulation and experiment. Li et al. (2023) proposed to maximize the noise ratio kurtosis product (NRKP) as the objective function and construct the signal envelope cyclic kurtosis (SECK) to estimate the maximum noise ratio kurtosis product deconvolution (MNRKPD) method for fault cycles. Zhao et al. (2025) used the cyclic stable feature energy index (CCEI) as the objective function of blind deconvolution filtering to capture fault features in signals, and established an adaptive filter length determination framework based on this, solving the problem of selecting filter length. Shi et al. (2025) used a Variable-length Genetic Algorithm (VGA) to determine the optimal length and coefficients of the blind filter, combining it with existing common blind deconvolution methods. Experimental results showed the method could effectively recover bearing fault information. Gu et al. (2022) measured the sparsity of signals using the Smoothness Index and the Gini Index, introducing a knee-point driven strategy to extend the Particle Swarm Optimization algorithm for solving multi-objective blind deconvolution problems. The method was validated using railway bearing experimental data, showing excellent robustness.
Although the latest research mentioned above has effectively addressed certain challenges in blind deconvolution filtering, including aspects such as fault period identification and filter parameter selection. Difficulties still remain in fault diagnosis for gear transmission systems. Specifically, during gear degradation, the fault features generated are more susceptible to interference from gear meshing effects. Moreover, the presence of numerous complex interfering signals within gear transmission systems poses additional challenges for establishing an optimal filter that can accurately characterize fault information. In summary, the performance of blind deconvolution is primarily influenced by core issues such as dependency on prior knowledge, signal sparsity, and the OF (Yang et al., 2024).
This paper addresses the aforementioned challenges, with the main contributions as follows. (1) A novel cycle-embedded sparsity measure is proposed based on the impulsivity and cyclostationarity characteristics of vibration signals under gear faults. (2) This sparsity measure is used as the OF for blind deconvolution filtering, and its performance under various conditions is investigated. (3) A generalized envelope spectrum CGGI calculation method is proposed, significantly enhancing signal sparsity. (4) The superiority of the proposed method is demonstrated through public datasets and a scaled laboratory test rig.
This paper is structured as follows: The Introduction outlines current engineering challenges. The Theoretical Foundation reviews the theoretical background of existing methods. Subsequently, the Proposed Method elaborates on our improvements and methodology, including a performance analysis of the Optimal Filtering (OF) technique using simulated signals. The Experimental Analysis validates the proposed approach through tests on public datasets and a custom universal shaft-gearbox test rig. Finally, the Conclusion summarizes the key findings.
2. Theoretical foundation
2.1. Blind deconvolution theory
The goal of blind deconvolution is to design appropriate filter coefficients based on the known measured signals, so as to reconstruct the desired signal components through convolution operations (Cheng et al., 2018). Thus, the principle of blind deconvolution can be expressed as

Among them,
Expressing the above in matrix form
The original measured signal


The filtered signal
Two central issues in blind deconvolution research are finding the optimal solution for the aforementioned filter and determining the method to solve for it. The approach for solving the filter is determined by the OF of the deconvolution. Commonly used methods include the Objective Function Method (OFM), the Eigenvector Algorithm (EVA), and the Spherical Coordinate Transformation method, among others (Gu et al., 2025). Based on the OF proposed subsequently, the EVA method is selected for solving in this context. Detailed computational steps for the EVA can be found in reference (Buzzoni et al., 2018).
2.2. Cycle-embedded sparsity measures
Recently, based on the characteristics of impulsivity and cyclostationarity exhibited by vibration signals generated under rotating machinery faults, Hou et al. (2025) proposed a new type of Cycle-embedded Sparsity Measures (CESMs). CESMs are obtained by calculating the power mean of the sparsity measures corresponding to the vibration signal. The calculation process is as follows:
Step 1: Perform an envelope transform on the signal

Step 2: Segment the envelope signal

Here,

The choice of the sparsity measure within CESMs is flexible and can include metrics such as kurtosis, lp/lq norm ratio, and Gini Index (GI). The literature (Hou et al., 2025) primarily focuses on the detailed study of the pq-mean and the GI, because they satisfy six desirable properties of sparsity measures and are unaffected by signal length and subtraction operations. Furthermore, CESMs possess excellent characteristics for quantifying and extracting impulsive fault signal components and can serve as the OF in various signal processing methods to characterize fault components. Therefore, in The proposed method section, based on CESMs we propose a novel sparsity measure and apply it to the OF of blind deconvolution filtering.
3. The proposed method
3.1. Cycle-embedded generalized Gini Index (CGGI) based on generalized weighted envelope
The selection of the OF has been demonstrated to be one of the critical factors affecting the performance of blind deconvolution filtering methods (Yang et al., 2024). Recently, the Generalized Gini Index (GGI) has been shown to satisfy six desirable properties of a sparsity measure. By adjusting its parameter
Hou et al. (2022) extended the definition of the GI by reformulating it as the ratio of quasi-arithmetic means based on linear and nonlinear weighting functions. This generalization replaces the linear weights in the standard GI definition with a nonlinear form incorporating a parameter p, resulting in the Generalized Gini Index (GGI)
As mentioned in Theoretical foundation section, the calculation of CESMs uses the envelope signals obtained through the Hilbert transform and the squared transform for sparsity measurement. Although this approach effectively enhances the sparsity of the signal, it is highly sensitive to interference components and noise in the signal. For instance, the squared envelope significantly amplifies noise, while the Hilbert envelope performs poorly for multi-component signals. To address this, a novel GWE is proposed for the computation of CESMs.
First, we extend the squared envelope to a generalized envelope via a generalized power transformation

The Generalized Weighted Envelope spectrum (GWE) is proposed to integrate the feature enhancement effects of envelope spectra under different transformation parameters

Based on
Then, by reformulating the GGI into the form of a CESM, the CGGI can be obtained
Equation (10) reveals that the proposed CGGI possesses the capability to measure both the impulsivity and cyclostationarity of a signal. Furthermore, the introduction of the GWE enhances the robustness of CGGI for sparsity measurement when dealing with complex signals and reduces its susceptibility to unknown frequency band components. This highlights the potential of CGGI to serve as an OF for blind deconvolution. A detailed theoretical analysis of CGGI’s specific properties will be provided in The proposed method section.
3.2. Maximum CGGI based on generalized weighted envelope blind maximum deconvolution
In this section, the proposed CGGI is employed as the OF for blind deconvolution filtering. First, according to Equation (2) and Equation (10), the generalized envelope spectrum

Herein,
Taking
By employing the eigenvector-based algorithm and simplifying equation (18), the CGGI of
Therefore, following the above process of maximizing the CGGI for the filtered signal Flowchart of the deconvolution filtering method based on maximizing CGGI.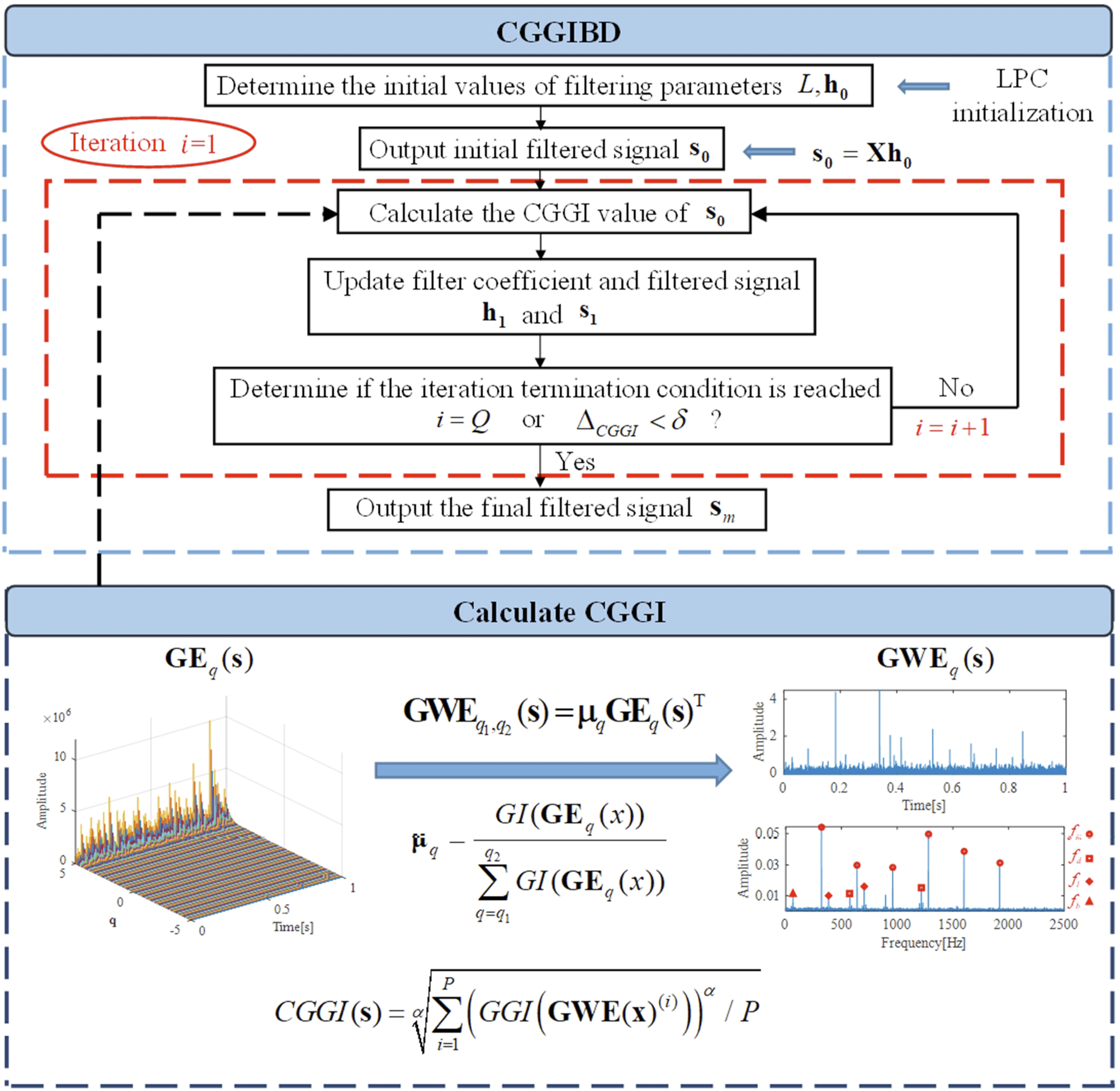
Step 1: Initialize the filter coefficients
Step 2: Based on Equations (15) to (19), compute the filter coefficients

Step 3: Enter the iterative process of blind deconvolution: repeat the procedure in Step 2 and determine whether the optimal deconvolution filtering result is achieved. The iteration stops and outputs the current optimal filter coefficients
3.3. Numerical analysis based on the proposed method
3.3.1. Performance analysis of the objective function
The performance of the OF significantly influences the results of blind deconvolution. Therefore, this section conducts a detailed numerical analysis of the proposed CGGI’s relevant performance using simulated signals. According to Equations (8) to (14), CGGI extends both the Gini index and the envelope spectrum of the signal into a generalized scope by introducing parameters. Thus, appropriate parameter selection becomes crucial for the performance of CGGI. Compared to the GI, the parameters of CGGI are mainly divided into two parts: those affecting its measurement of signal cyclostationarity (including the segment quantity
First, a simulation analysis was performed on signals measured from a gearbox housing. As shown in Figure 2, the signal components constituting the gearbox housing vibration signals mainly include deterministic components (signal components generated by gear meshing), fault components (including distributed gear faults, localized gear faults, and bearing faults), and interference components (such as random impulses, modulation interference, and noise) (Schmidt and Gryllias, 2021). Gearbox simulation signal and its components: (a) measured signal 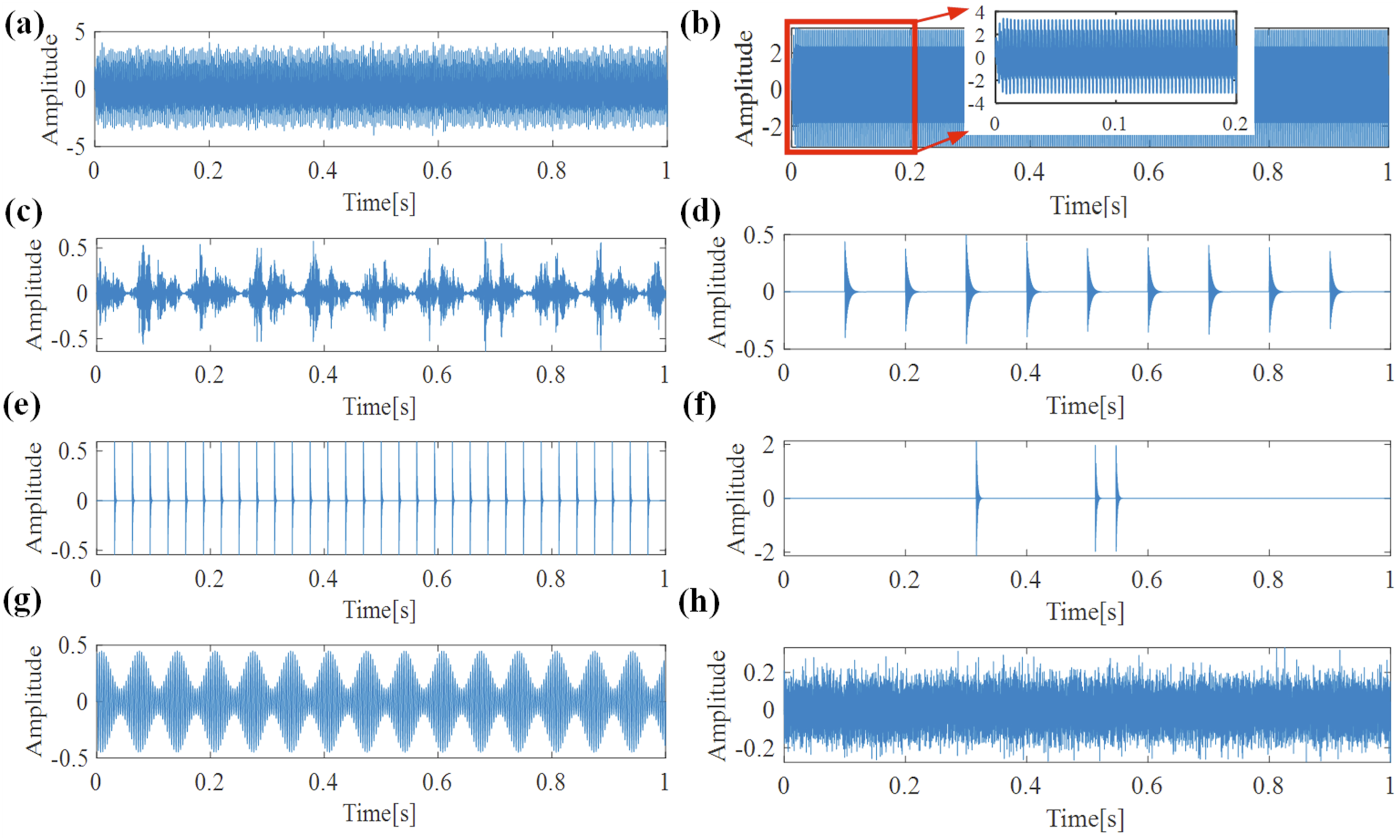
The envelope parameter Analysis of the generalized envelope spectrum under different envelope parameters 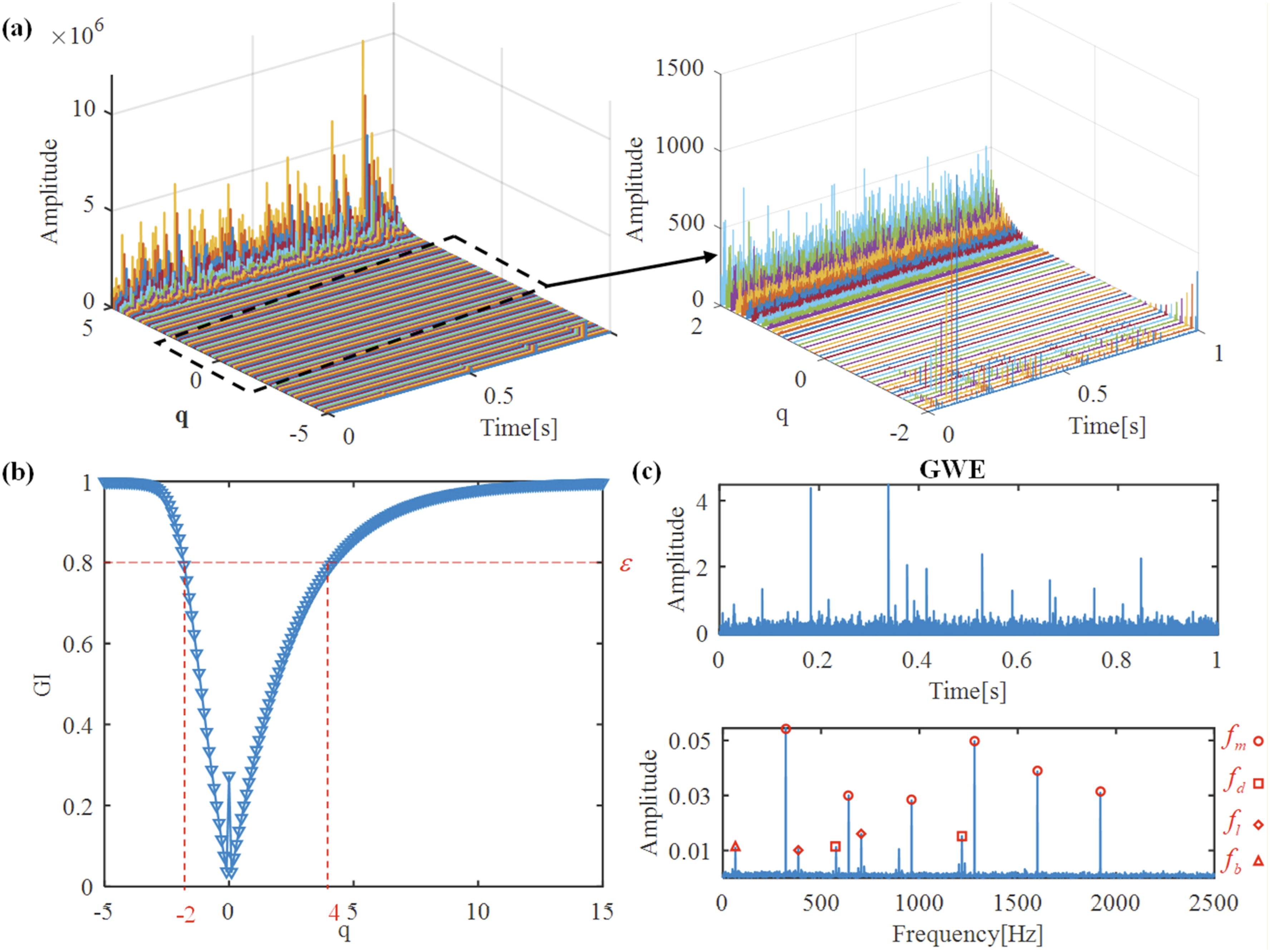
To determine an appropriate range for the envelope parameter, the GI is used for the initial selection of the range of envelope parameter
Furthermore, the performance of the OF significantly influences the results of blind deconvolution. First, as shown in Figure 4(a), a comparison is made by calculating the normalized amplitudes of the proposed CGGI and several commonly used OFs in blind deconvolution (Chen et al., 2023) under different signal components. It can be observed that most OFs (e.g., Kurtosis (Kurt), L2/L1 norm (L2/L1), Hoyer Index (HI), GI, GGI, Negentropy (NE), D-norm (DN)) are highly sensitive to the deterministic components generated by gear meshing in the gearbox. This is because the gear meshing components exhibit the highest amplitude and dominate the vibration signals. However, these OFs show comparable sensitivity to both fault components and interference components, thus they cannot effectively enhance the fault components by maximizing the OF during the blind deconvolution process. In contrast, the proposed CGGI effectively reduces sensitivity to gear meshing components and other interference components, enabling effective enhancement of fault features in the signal through the blind deconvolution process. Analysis of OFs for different types of signal components: (a) Comparison of different OFs; (b) Comparison of different envelope parameter ranges.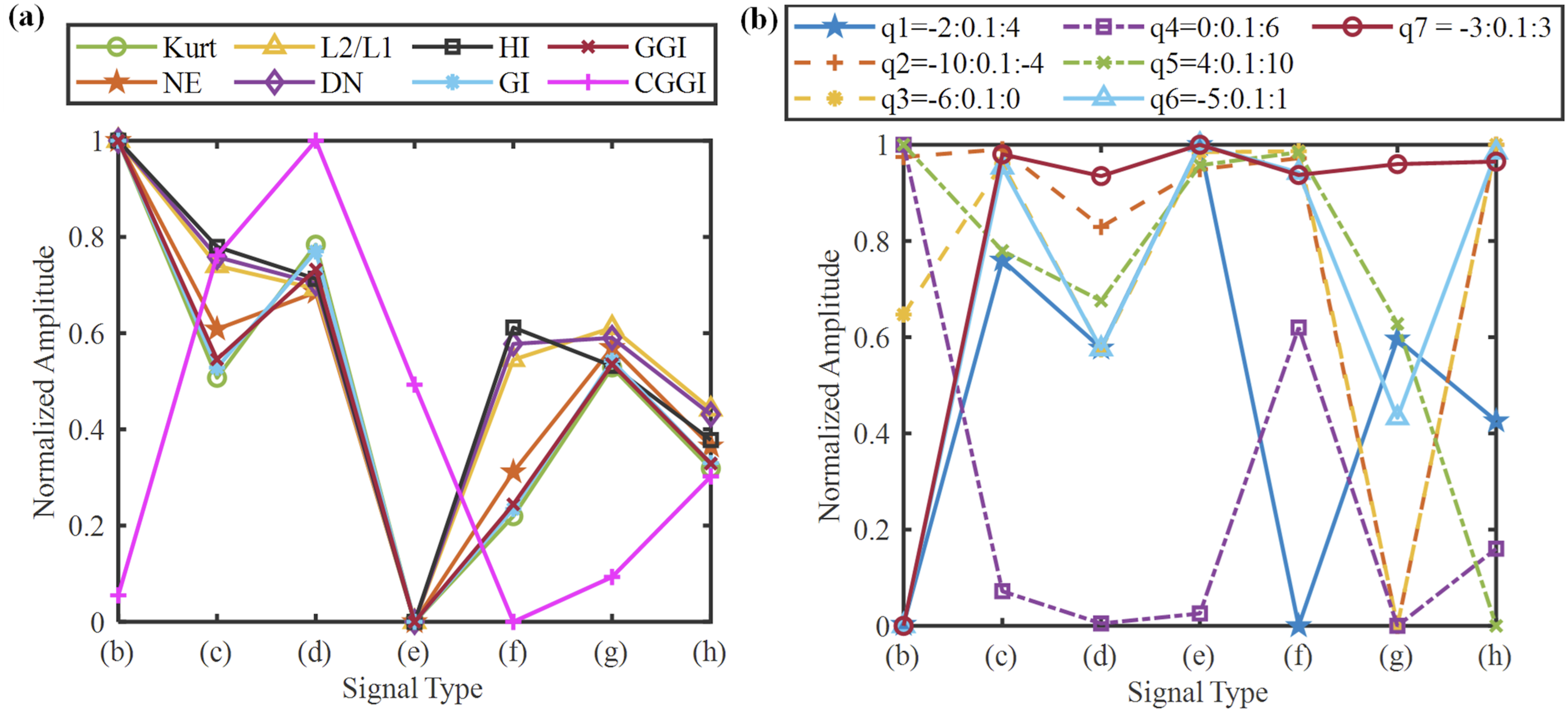
Furthermore, we compared the CGGI values calculated under different envelope parameter ranges, dividing the envelope parameter range into three parts: the all-negative range
As mentioned in The proposed method section, the input signal has an impact on the calculation of sparsity measures. Therefore, it is necessary to compare the CGGI values computed from different signals. As shown in Figure 5, the CGGI is calculated separately for the original signal, Hilbert envelope spectrum (HE), squared envelope spectrum (SE), and GWE under different noise levels. It can be observed that the CGGI values obtained from these four different types of signals exhibit a monotonic trend as the noise level changes. However, except for GWE, the CGGI values derived from the other three signals show partially pseudo-monotonic trends, as indicated within the red dashed box in Figure 5. Meanwhile, the CGGI value calculated via GWE demonstrates the least noticeable change throughout the variation in noise level. This proves that the proposed CGGI, computed based on GWE, possesses good robustness against noise interference and can serve as an excellent OF for the blind deconvolution process. Comparative results of CGGI calculations for different input signals under various noise levels.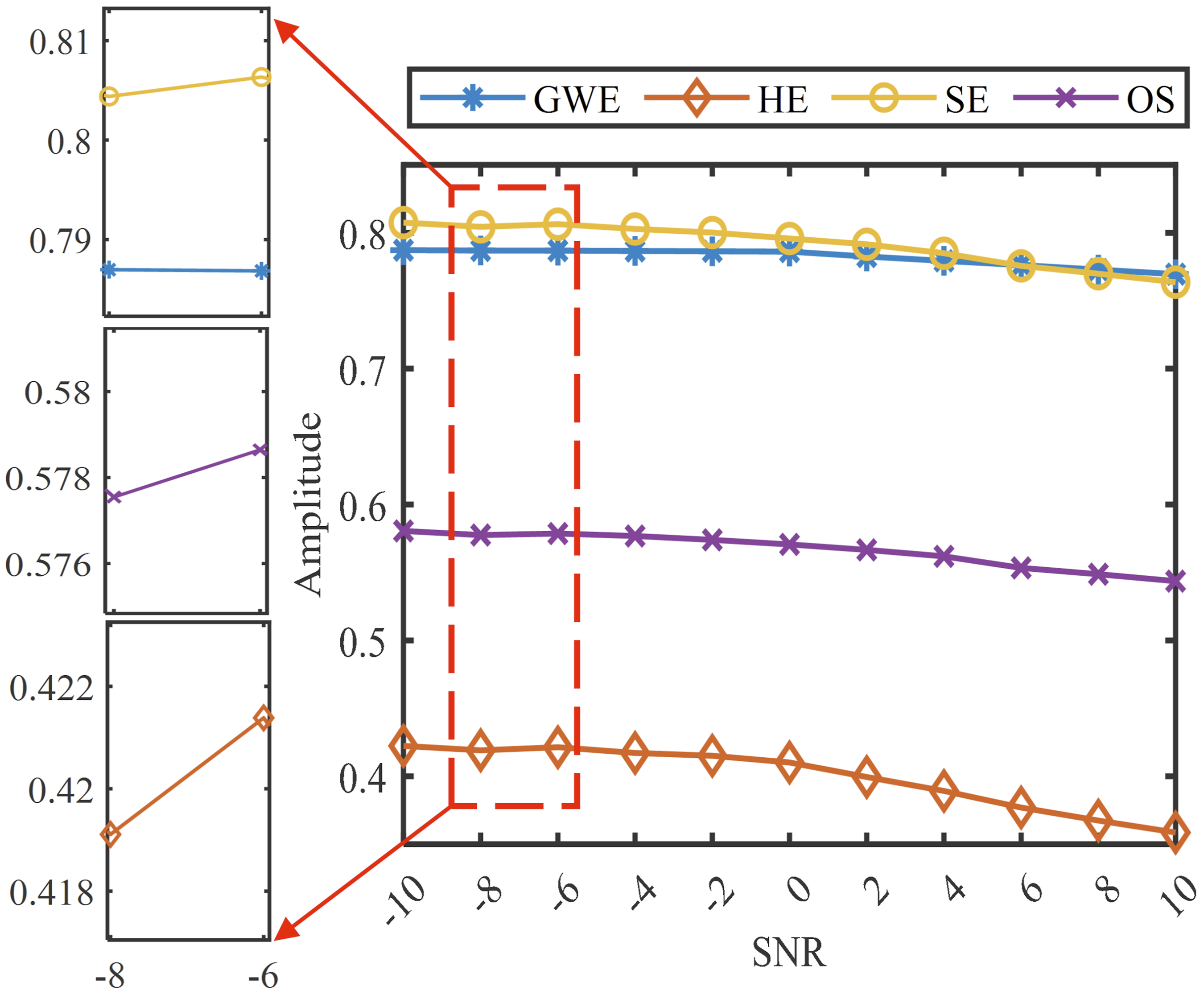
3.3.2. Performance analysis of the blind deconvolution process
The setting of the filter length, as one of the critical initialization operations in the blind deconvolution process, significantly influences the filtering results. As shown in Figure 6(a), the time-domain and frequency-domain plots of the blind deconvolution results for the gearbox simulation signal from The proposed method section under different filter lengths are presented. When the filter length L is chosen too small (e.g., Analysis of the impact of filter length on blind deconvolution: (a) time-domain and frequency-domain plots of the filtering results; (b) analysis of computational efficiency and filtering performance.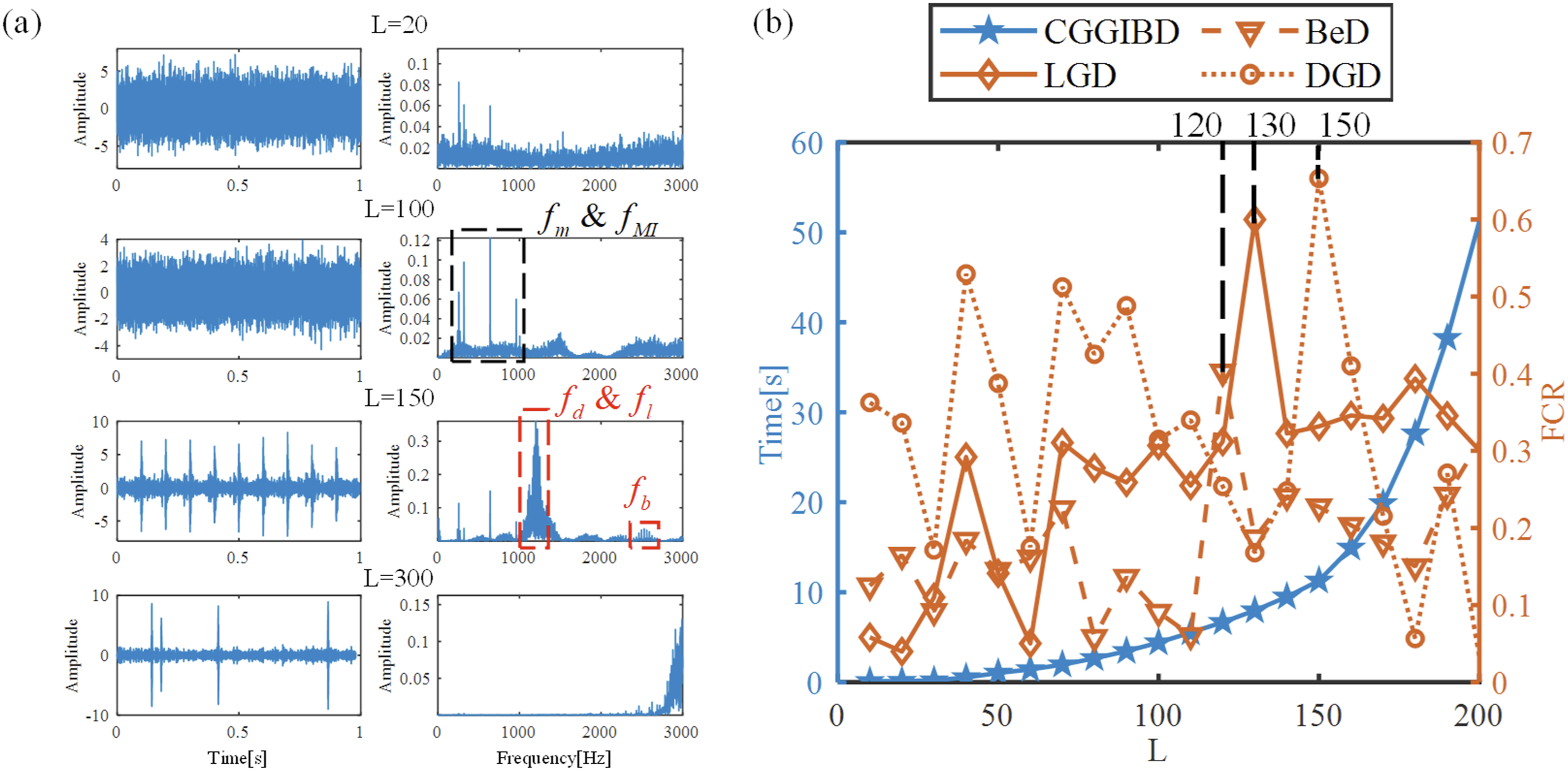
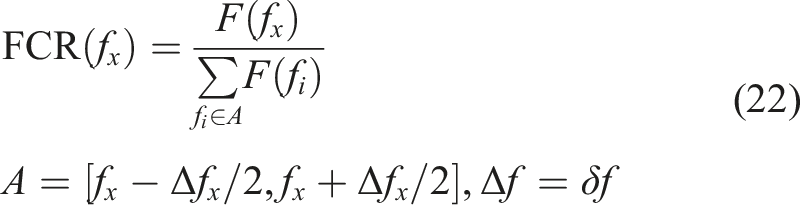
Therefore, an appropriate value of L is selected by considering both the computational time consumed by the blind deconvolution process and the FCR of the filtered signal. The calculation of FCR is as defined in equation (22)
As shown in Figure 6(b), the computational time of the blind deconvolution process increases significantly with larger values of L. Thus, selecting a smaller L helps improve computational efficiency. Meanwhile, for the three different fault types included in the simulation signal, Localized Gear Damage (LGD), Distributed Gear Damage (DGD), and Bearing Damage (BeD). Their FCR values under different L values are calculated to investigate the appropriate filter length selection. The results indicate that the optimal filter lengths for these faults are
4. Experimental analysis
4.1. Experiment 1: MCC5-THU gearbox fault diagnosis datasets
First, the performance of the proposed method was validated using vibration data collected from a two-stage parallel-shaft gearbox test rig. The test rig provided data corresponding to different fault levels and fault types, including healthy gears, missing teeth, wear, root cracks, and tooth breakage, as well as operational data under various rotational speeds and loads. The experimental setup, shown in Figure 7, for further details regarding the test rig, please refer to literature (Chen et al., 2024). MCC5-THU Gearbox Multi-mode Fault Datasets: (a) Test rig of the two-stage parallel-shaft gearbox; (b) Gear transmission and its fault configurations.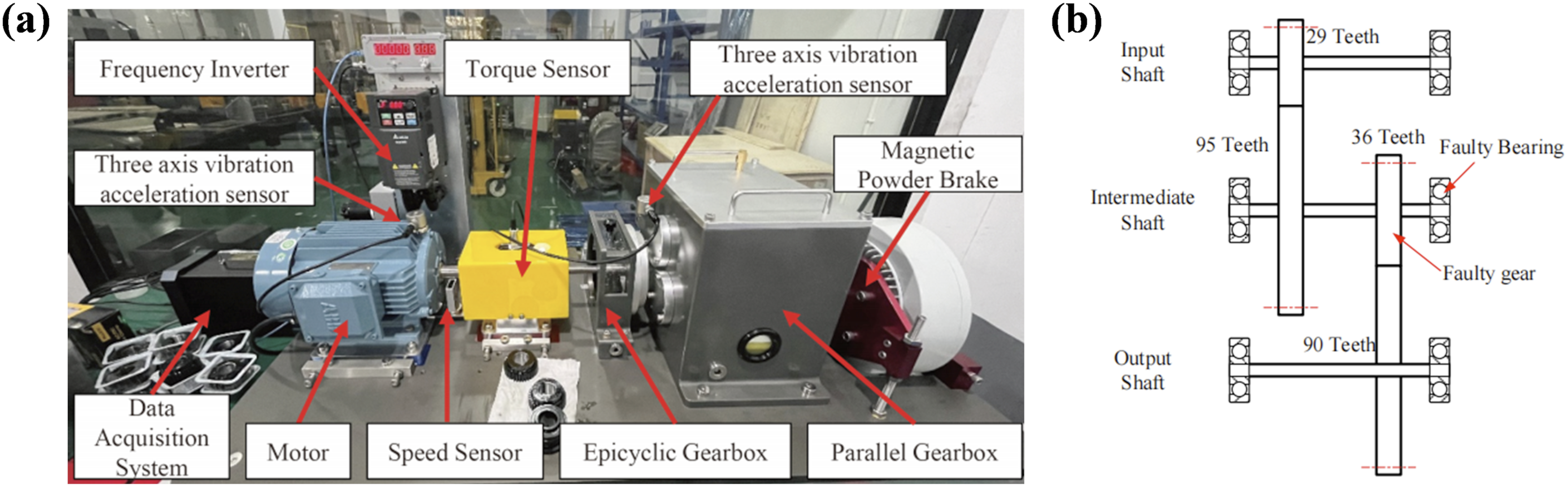
During the operation of a gearbox with an input shaft speed of 2000 r/min, vibration signals under two different fault conditions were collected using a data acquisition instrument with a sampling frequency of 12.8 kHz. Both faults were located on the planetary gears of the secondary gear transmission stage: missing teeth and tooth surface wear. The malfunction is obtained through manual processing. These faults were introduced separately to simulate scenarios of severe gear damage and initial gear damage. During signal acquisition, a load of 10 N·m was applied to the output terminal. The measured vibration signal is shown in Figure 8. Time-domain and frequency-domain diagrams of the experimental signals under gear fault conditions: (a) tooth surface wear, (b) missing tooth.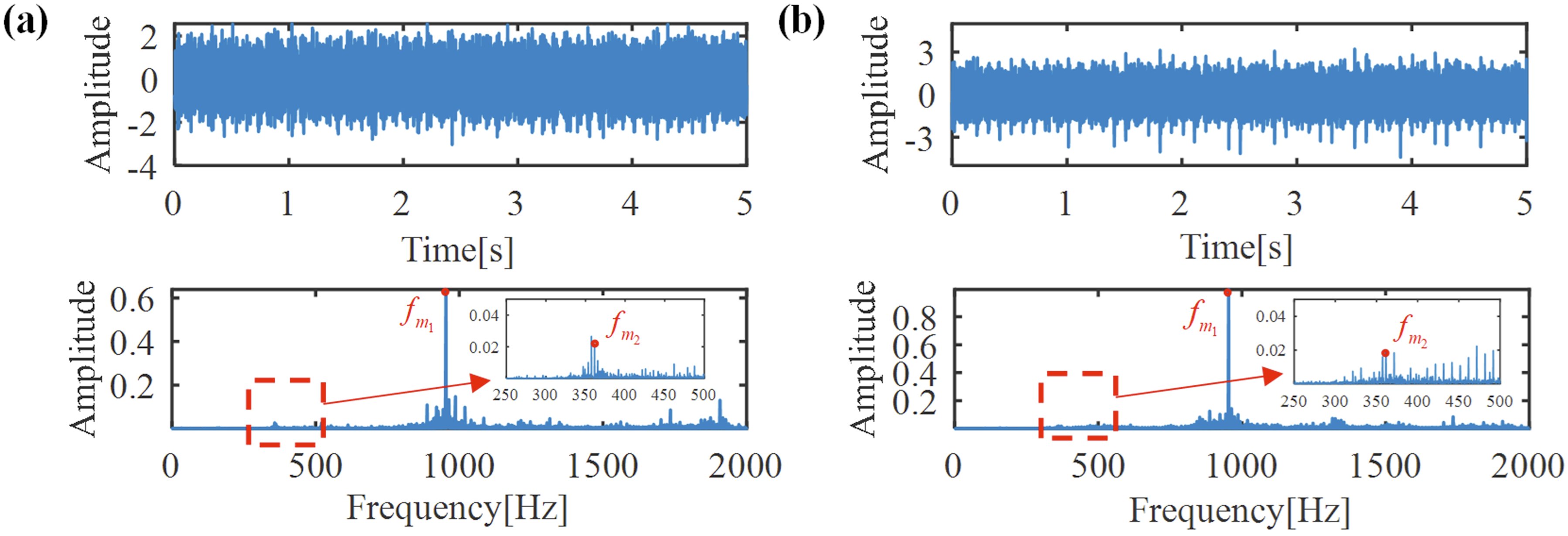
Analysis of the experimental signals under the two different fault conditions reveals the following: When a missing tooth fault is present in the gear transmission, distinct high-amplitude segments appear in the time-domain signal, and noticeable sidebands emerge near the first-stage meshing frequency
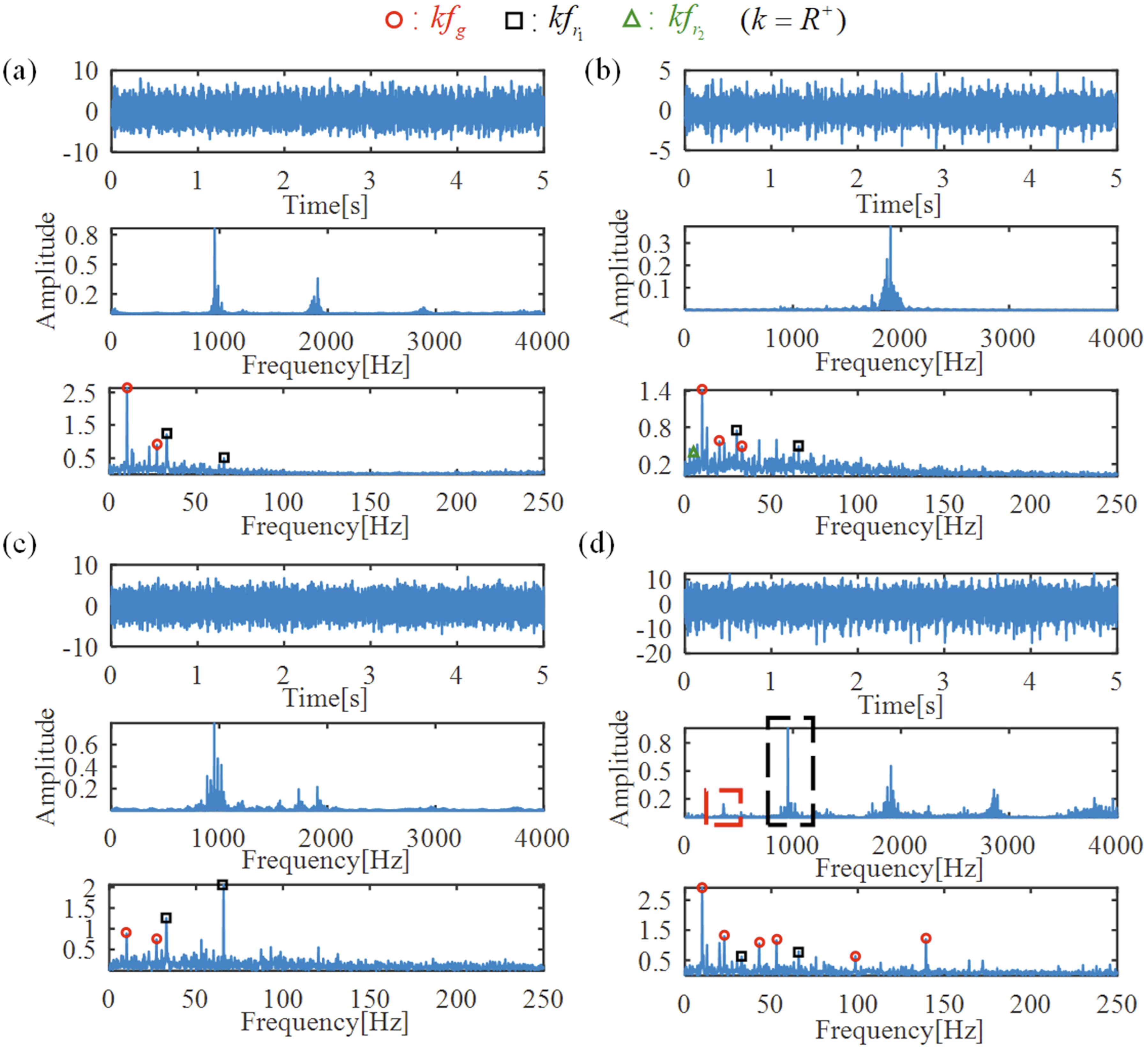
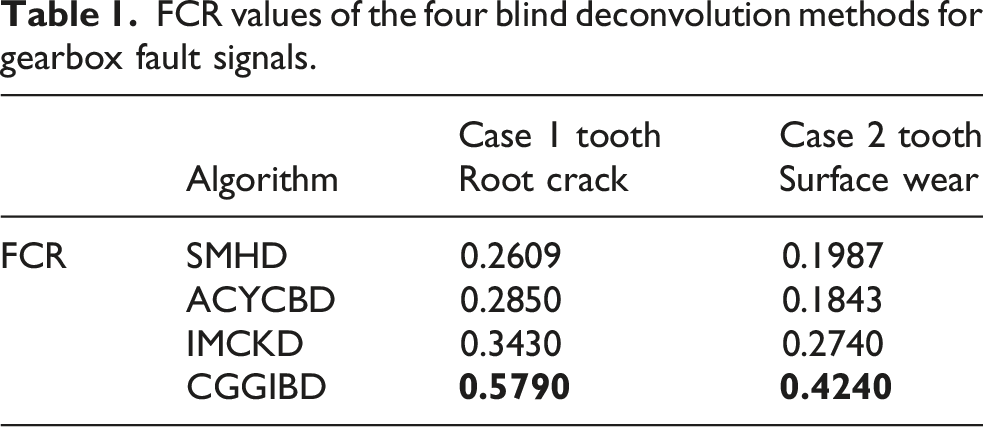
The processing results of the four blind deconvolution methods under two different fault conditions are shown in Figures 9 and 10. Identical input parameters were selected for all four blind deconvolution methods: the filter length was set to Comparison of filtering results from four blind deconvolution methods under the gear missing tooth condition: (a) SMHD; (b) ACYCBD; (c) IMCKD; (d) CGGIBD. Comparison of the results from four blind deconvolution methods under the tooth surface wear condition: (a) SMHD; (b) ACYCBD; (c) IMCKD; (d) CGGIBD.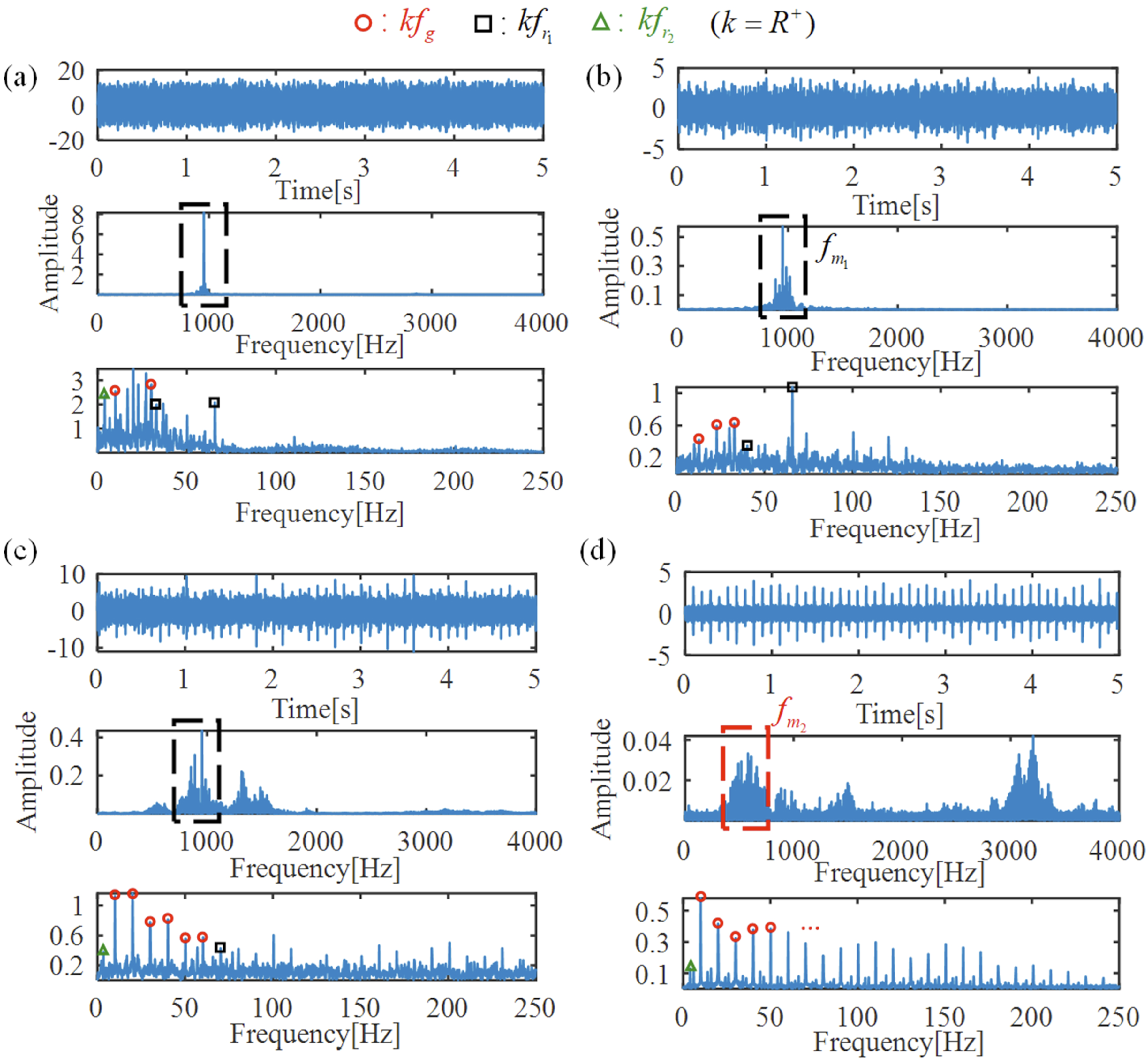
When a tooth is missing from the gear, periodic impulse components caused by the missing tooth are clearly observed in the time-domain results of the IMCKD and CGGIBD blind deconvolution methods, whereas the results from SMHD and ACYCBD are less distinct and severely affected by noise interference. In the frequency-domain plots and the machine envelope spectrum, only CGGIBD accurately locates and enhances the frequency band corresponding to the second-stage meshing frequency
In the case of tooth surface wear, the amplitude of the signal components characterizing the fault is significantly reduced. Compared with the tooth-missing fault, the weak fault information in this scenario is more challenging to accurately locate, identify, and extract. Similar to the results in Figure 9, the high-amplitude components generated by the first-stage transmission section affect the blind deconvolution process in identifying the fault information. Compared to the other three methods, the proposed CGGIBD still effectively enhances the fault information, accurately identifying the fault characteristic frequency corresponding to the tooth surface wear and its harmonics in the envelope spectrum.
FCR values of the four blind deconvolution methods for gearbox fault signals.
4.2. Experiment 2: high-speed train’s body-suspended transmission system test rig
To verify the proposed method, we have built a fault testing device for the high-speed train body-suspended transmission system. The device includes a drive motor, a load motor, a universal shaft, a spiral bevel gearbox, an exciter, and a measurement and control system. Various faulty parts were manually processed and polished, including normal tooth count, missing teeth, tooth surface wear, gear root cracks, as well as universal joint crosshead wear, dynamic imbalance, and needle roller bearing wear. Collect operational data at different speeds and load conditions. The data acquisition system comprised an HD2000 8-channel acquisition unit, a KISTLER 8763 triaxial vibration accelerometer, and a laptop computer. The accelerometer had a measurement range of ±10 g, and the sampling frequency was set to 10 kHz. The sensors were installed on both the driving and driven gears. The experimental setup is shown in Figure 11. Fault test rig for the high-speed train body-suspended transmission system.
First, vibration signals were collected from the body-suspended transmission system under two different fault conditions and operating scenarios: a missing tooth on the pinion in the spiral bevel gear transmission and crosshead wear in the universal shaft transmission. To validate the effectiveness of the proposed method under varying working conditions, a load of 5 N·m was applied in the case of the tooth-missing fault. The time-frequency diagrams of the measured signals are shown in Figure 12. Time-frequency diagram of vibration signals under fault conditions of the body-suspended transmission system: (a) missing tooth; (b) cross shaft wear.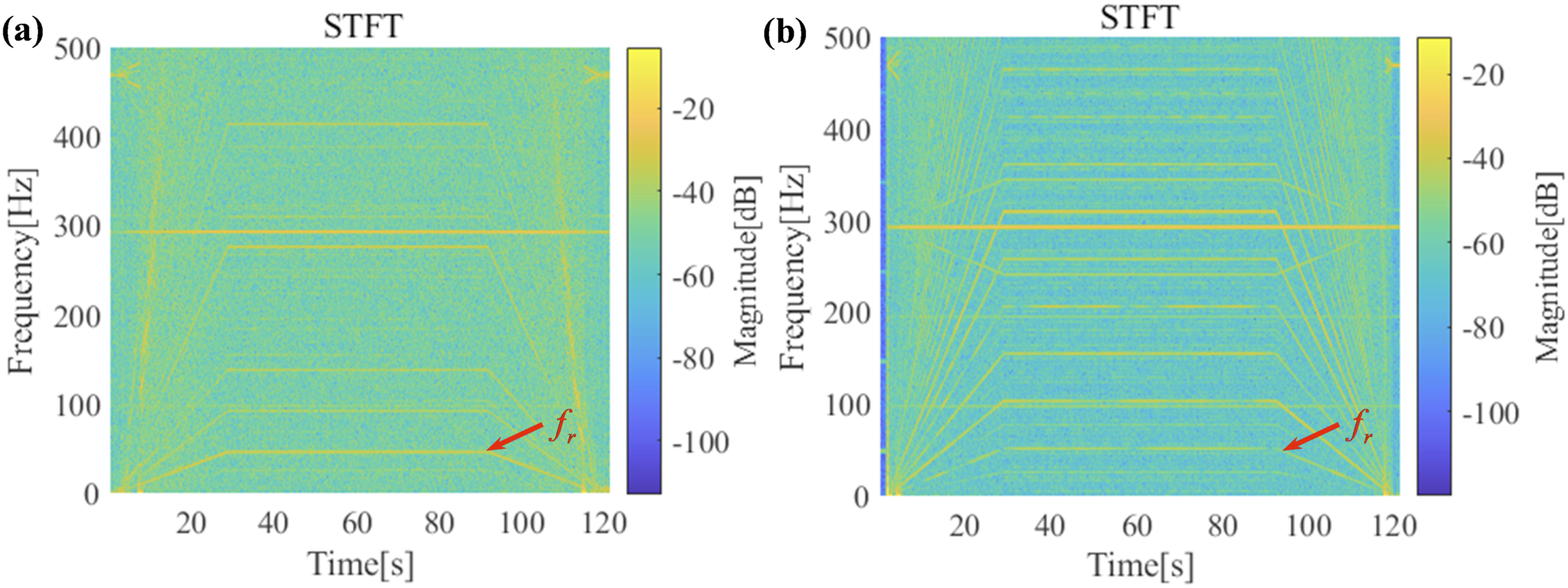
Analysis of the time-frequency diagrams reveals that the motor rotational frequency
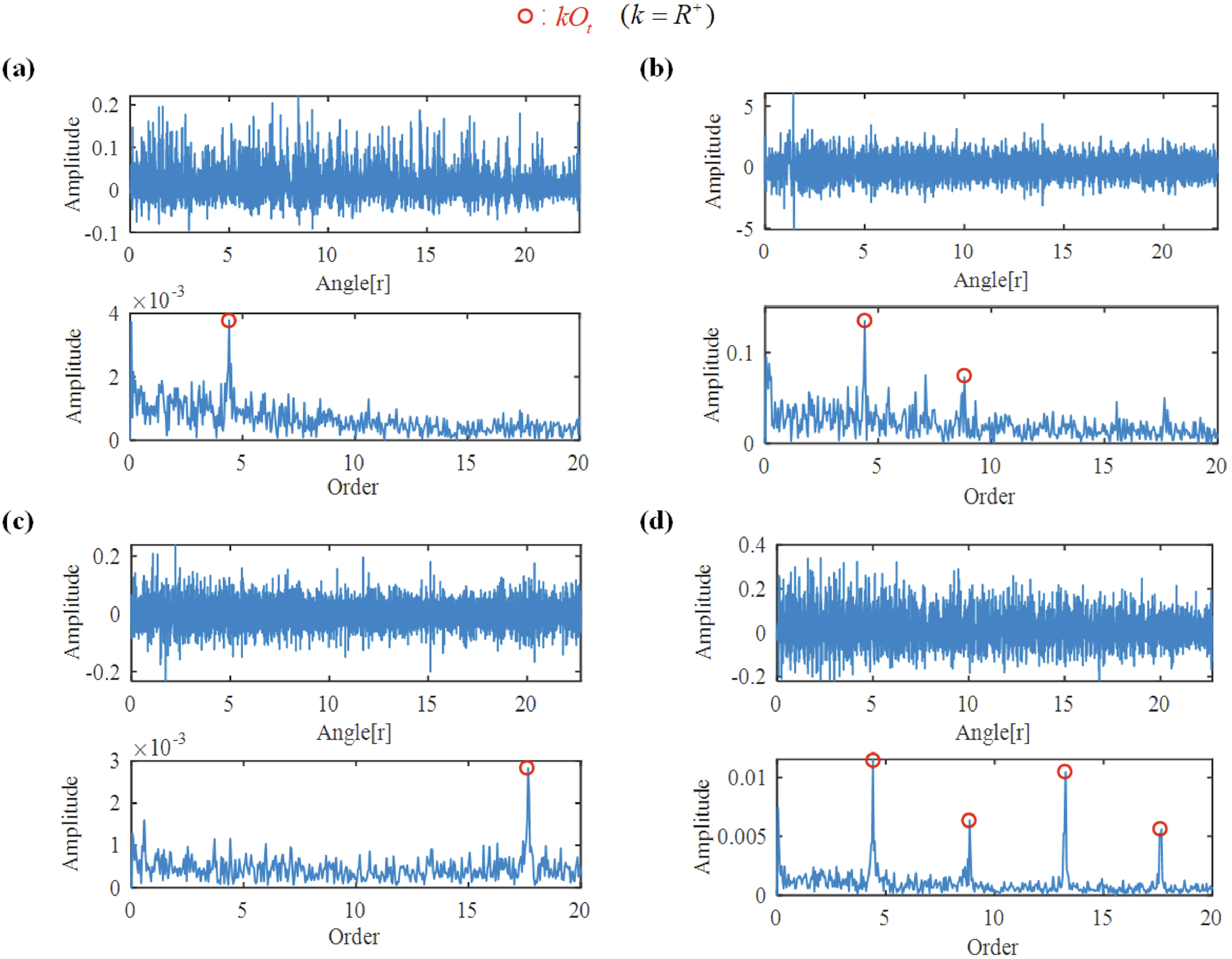
The filtering results of the four blind deconvolution methods on the measured vibration signals under the two fault conditions are shown in Figures 13 and 14. To counteract the influence of shifting fault characteristic frequencies caused by varying operating conditions, order analysis was performed by angular resampling of the signals, converting them into angular-domain signals for analysis. It can be observed that the CGGIBD method accurately identifies the fault characteristic orders Order analysis results of different methods under the gear missing tooth condition: (a) SMHD; (b) ACYCBD; (c) IMCKD; (d) CGGIBD. Order analysis results of different methods under the universal joint crosshead wear condition: (a) SMHD; (b) ACYCBD; (c) IMCKD; (d) CGGIBD. FCR values of the four blind deconvolution methods for the body-suspended transmission system fault signals.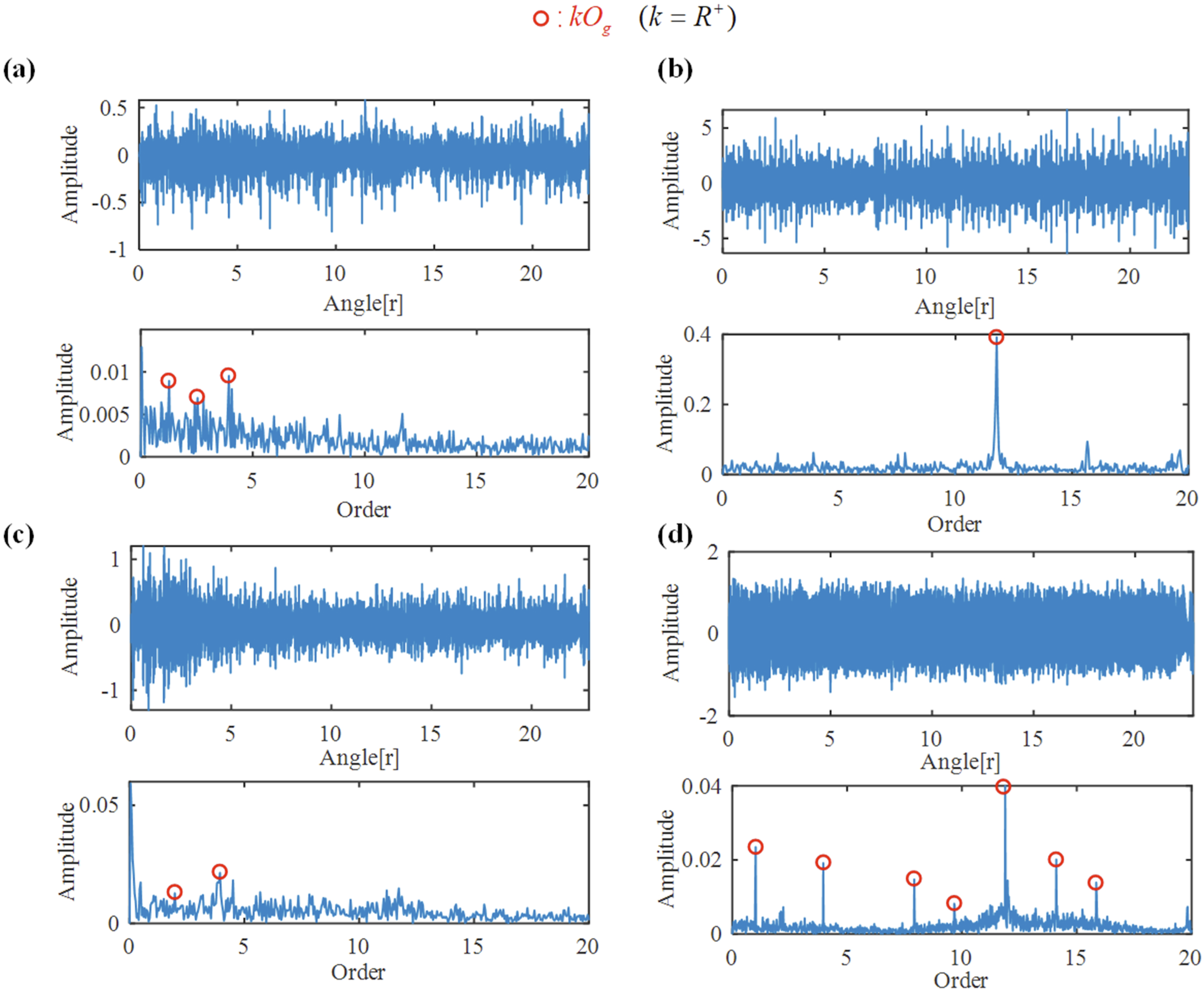

5. Conclusion
This paper focuses on the challenge of fault feature extraction in gear transmission systems under complex operating conditions. Vibration signals often contain weak fault characteristics that are masked by noise and interference. To address this, we propose a novel blind deconvolution method that adopts a newly developed sparsity measure as the objective function (OF). The core contributions include. (1) Proposing the Cycle-embedded Generalized Gini Index (CGGI) based on the impulse and cyclostationary characteristics of gear vibration signals, using the GWE as input; (2) Investigating the performance of CGGI as an objective function for blind deconvolution filtering and providing guidelines for selecting relevant parameters to maximize its effectiveness; (3) Validating the superiority of the proposed method through publicly available datasets and a dedicated test platform.
Experimental results demonstrate that the method can effectively enhance fault features under various operating conditions. Currently, the performance of the proposed method under non-Gaussian noise interference remains to be studied. In practical industrial environments, non-Gaussian noise is prominently present in gear systems—such as those found in crushers and high-speed trains—and the high-amplitude impulses associated with such noise may adversely affect the performance of CGGI. Future research will focus on extending CGGI and GWE to other sparsity measures and adapting them to more complex fault diagnosis requirements.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (Project NO. 52272385, 52475085) and Natural Science Foundation of Beijing Municipality (Project NO. L241033). The authors would like to thank the reviewers for their valuable comments.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.