
Abstract
This paper addresses the problem of plate bending for a square weakened with a full-strength hole including the origin of coordinates. The vertices of the square lie on the coordinate axes and its neighbourhoods are cut by the same smooth full-strength arcs which are symmetric with respect to the coordinate axes. Rigid bars are attached to each component of the broken line of the outer boundary of the plate. The plate bends under the action of concentrated moments applied to the middle points of the bars. The unknown part of the boundary is free from external forces. Using the methods of complex analysis, the unknown part of the boundary is found under the condition that the tangential–normal moment takes a constant value. Numerical analysis is performed and the corresponding graphs are constructed.
1. Introduction
The problems of stress concentration control on the boundary of the hole of an elastic body are, from the applied viewpoint, very important and mathematically rather complicated. Their solvability provides the optimal stress distribution by selecting the appropriate hole boundary.
The tangential–normal stresses, in the case of plane elasticity theory, or the tangential–normal moments, in the case of bending of thin plates, can at some points reach values that cause destruction of plates or the formation of plastic zones near the hole. Proceeding from this, the following problem was posed: given a load applied to the plate’s boundary, choosing a hole shape such that at its boundary the maximum value of the tangential–normal stress or the tangential–normal moment is minimal in comparison with the all other holes is required. It is proved that such a condition is valid provided that tangential–normal stress and tangential–normal moments are constant at that hole. As is known, such holes are called full-strength ones.
Boundary-value problems of the plane theory of elasticity and plate bending for infinite plates weakened by unknown full-strength holes with normal stresses acting on their boundaries and forces applied at infinity were analysed in [1–6].
Boundary-value problems for a finite doubly connected domain with a part of its boundary being unknown full-strength and the other part being a polygonal line are solved in [7, 8].
The axis-symmetric and cycle-symmetric problems of the plane theory of elasticity and plate bending with partially unknown boundaries are studied in [9–19].
In this article the cycle problem of bending for a square weakened with a full-strength hole is considered. The vertices of the square lie on the coordinate axes and its neighbourhoods are cut by the same smooth full-strength arcs which are symmetric with respect to the coordinate axes. Rigid bars are attached to the linear parts of the boundary. The plate bends by moments applied to the middle points of the bars. The unknown part of the boundary is free from external forces. Using methods of complex analysis, the analytical image of Kolosov–Muskhelishvili’s complex potentials (characterizing an elastic equilibrium of the body) is constructed and the unknown parts of its boundary are determined under the condition that the tangential–normal moment on that takes a constant value.
2. Statement of the problem
Let a middle surface of a homogeneous isotropic elastic plate on the complex plane z = x + iy occupy a doubly connected domain, representing a square weakened by an unknown hole. Assume that the point z = 0 is located inside of the unknown hole. The vertices of the square lie on the coordinate axes and its neighbourhoods are cut by the same unknown arcs which are symmetric with respect to the coordinate axes (Figure 1).
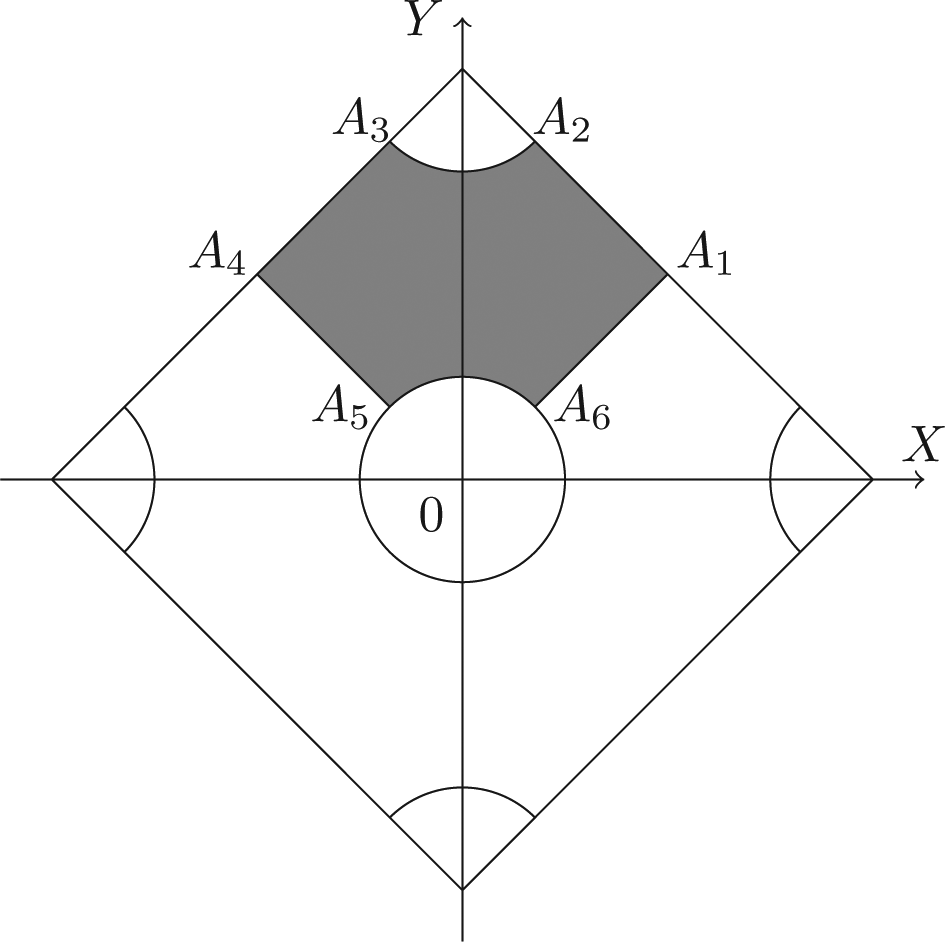
Statement of the problem.
The side length of the square is assumed to be equal to 2a. Rigid bars are attached to each component of the broken line of the outer boundary of the plate. The plate bends under the action of concentrated moments M applied to the middle points of the bars. It is evident that the normals to the middle surface drawn at the points of rectilinear segments of the boundary turn through one and the same constant angle. Unknown parts of the boundary are free from outer actions.
Consider the following problem.
According to the approximate theory of the plate bending, the deflection of the middle surface w(x,y) in the case under consideration is a biharmonic function. Since the angle of rotation of the middle surface normal ∂w/∂n is constant on the linear part of the outer boundary, it is not difficult to see that the torque Hns = 0 and shearing force Nn = 0. Thus on the entire boundary Hns = Nn = 0. On the known part of the plate boundary ∂w/∂n = const and on the unknown part of the boundary the normal bending moment Mn = 0 and the tangential–normal moment Ms = const.
Since the problem is symmetric with respect to segments connecting the middle points of the opposite square sides, and to the coordinate axes OX and OY, it is easy to show that on the segments [A6A1], [A4A5],

To study the above-formulated problem, it is sufficient to consider a curvilinear hexagon A1A2A3A4A5A6 which is denoted by S. Let us introduce the notation Γ1 = A1A2, Γ2 = A3A4, Γ3 = A4A5, Γ4 = A6A1,

The boundary conditions of the problem can be written in the form



3. Problem solution
As is known, the biharmonic in S function w(x,y) can be presented by the Goursat formula

where φ(t) and χ(t) are holomorphic functions in S. We can replace formula (5) by a formula more convenient for our purpose:

where ψ(z) = χ′(z).
It is known that Mn, Nn, Hns and Ms are expressed in terms of the functions φ(z) and ψ(z) by formulas analogous to those of Kolosov–Muskhelishvili (see [20, 21]):



where

ν is the Poisson coefficient and D is the cylindrical rigidity.
Taking into account formulas (6), (7) and (8), the boundary conditions of problem (2)–(4) can be presented in the form




where

where α(t) is the angle size, made by the outward normal n and the axis OX :

Taking into account (1), (3) and (14), one gets

Subtracting (10) from (11) and differentiating with respect to the arc abscissa s and taking into account that C(t), α(t) and ∂w/∂n are piecewise-constant on Γ, we obtain

In what follows, the functions φ(z) will be assumed to be continuous in the closed domain S, while functions φ′(z) and ψ(z) are continuously extendable on the boundary of S, with the exclusion of the points A2, A3, A5, A6 in the neighbourhood of which the following estimate is admitted:

Equalities (13) and (16) are, in fact, the Keldysh–Sedov problem for the domain S:

Problem (18) has a unique solution:

Hence one obtains

where the constant was neglected because it is not necessary for the construction of the solution to the posed problem. It is generally used for the determination of some additional conditions for obtaining analytical solutions, which is not relevant in this case.
Substituting the values B(t), C(t) and ϕ(t) into the boundary conditions (10) to (12), one gets the following problem:


where

Let t ∈ Γ
j
, j = 1,2,3,4. Then

where A(t) is a piecewise-constant function, A(t) = Aj, t ∈ Γ j , j = 1,2,3,4.
Thus if t ∈ Γ j , j = 1,2,3,4, then

Taking into account (14), the conditions (21), (22) and (24) can be written as follows:




Combining equations (28) and (26) in the following way: K (28) – (26), we obtain

Analogously, from (25) and (27) we obtain

Let z = ω (ζ), ζ = ξ +iη, conformally map the domain S onto the upper half-plane Im ζ > 0. By aj we denote the image of the point Aj, j = 1,…,6. Assume that a6 = 1, a5 = −1, and the middle point of the arc A2A3 turns into ζ = ∞. Since the domain is symmetric with respect to the axis OY, −a2 = a3 and −a1 = a4.
Denote


Taking into account (31) and (32), the boundary conditions (25), (26), (29) and (30) take the form


The solution to the boundary-value problem (33) and (34) is given by the Keldysh–Sedov formula [22]:


where


By X1(ζ) and X2(ζ) we mean the branch of the holomorphic function in the upper half plane which at infinity takes the value

It easy to show that



Taking into account (39) and (40), the formulas (35) and (36) can be written as follows:


4. Definition of deflection
Since all mechanical values such as deflection, bending moments, etc. are defined by complex potentials φ(z), ψ(z), solutions can be obtained in a straightforward way.
To obtain a numerical solution to the plate deflection
We calculate these functions φ(z) = φ (ω(ζ)), ψ(z) = ψ (ω(ζ)) at the points ζ. In the half-plane, if we choose these points ζ sufficiently close to each other, then the points z (where z = ω (ζ)) of the considered domain S corresponding to them will also be close to each other. Therefore we can calculate values of deflection bending moments of the considered body at any point with high accuracy, since mapping functions z = ω (ζ), φ (z) = φ (ω(ζ)) and ψ(z) = ψ (ω(ζ)) are analytical.
Taking into account (20), (31) and

where x = Re z = Re (ω(ζ)), y = Im z = Im (ω(ζ)) and

where Φ(ζ), ω(ζ) and K are defined by (42), (49) and (47) correspondingly. Thus, one obtains

where C1 = const.
5. Construction of unknown parts of the boundary
Since the functions X1(ζ) and X2(ζ) have singularities of order 0.5 at the points ξ = ±a1, for the functions Φ(ζ) and Ψ(ζ) to be bounded near the points a1 and −a1 it is necessary and sufficient for the following conditions to be fulfilled:


If we replace ξ by −ξ in condition (45) and take into account condition (41), we will obtain the condition which coincides with condition (44). This condition is in fact the system of two equations involving unknown parameters a1, a2, C and K:

Solving the system with respect to K and C we obtain


Conditions (47) and (48) are valid for arbitrary parameters a1, a2, 1 < a1 < a2 < ∞, that is, conditions (44) and (45) are valid for these conditions.
Hence we conclude that boundary problems (33) and (34) have infinite solutions, which are given by formulas (42) and (43). From equalities (31) and (32) we obtain

Passing in formulas (42) and (43) to the limit ζ →ξ0 ∈ (–1,1) and using the Sokhotski–Plemelj formulas, we obtain

where


The integrals

and

included in equalities (51) and (52) are singular and exist in the Cauchy principal value sense.
Replacing ξ0 by −ξ0 and ξ by −ξ in equality (51), and using (41), we get

The equation of arc γ2 is given by formula

Inserting in the last formula the values Φ(ξ0) and Ψ(ξ0) defined by equality (50) and taking into account (53), we find

Hence, it can be easily seen that the arc γ2 is symmetric with respect to the OY-axis. Analogously, the equation of arc γ1 is given by the formula

Taking into account equality (9), from equality (20) we obtain that the shearing force Nn = 0, in other words, all the conditions on the boundary are fulfilled.
The graph for the arc γ2 is constructed by ω1(ξ0) = ω (ξ0) for ξ0 ∈ (-1,1), and graphs for the arc γ1 by ω2(ξ0) = ω (ξ0) for ξ0 ∈ (a2,+∞) and ω3(ξ0) = ω (ξ0) for ξ0 ∈ (-∞,-a2). Since the problem is cyclically symmetric, the remaining parts of the full-strength contour are constructed by rotating the graph ω(ξ0) by value π/2. Values K and C are defined from formulas (47) and (48) for given P.
Let the width of the plate be h = 0.1, the Poisson coefficient be ν = 1/3 and Young’s modulus be E = 5 × 105. Then the cylindrical rigidity will be

In Figure 2, the graphs of a full-strength boundary for different parameter selections are constructed.
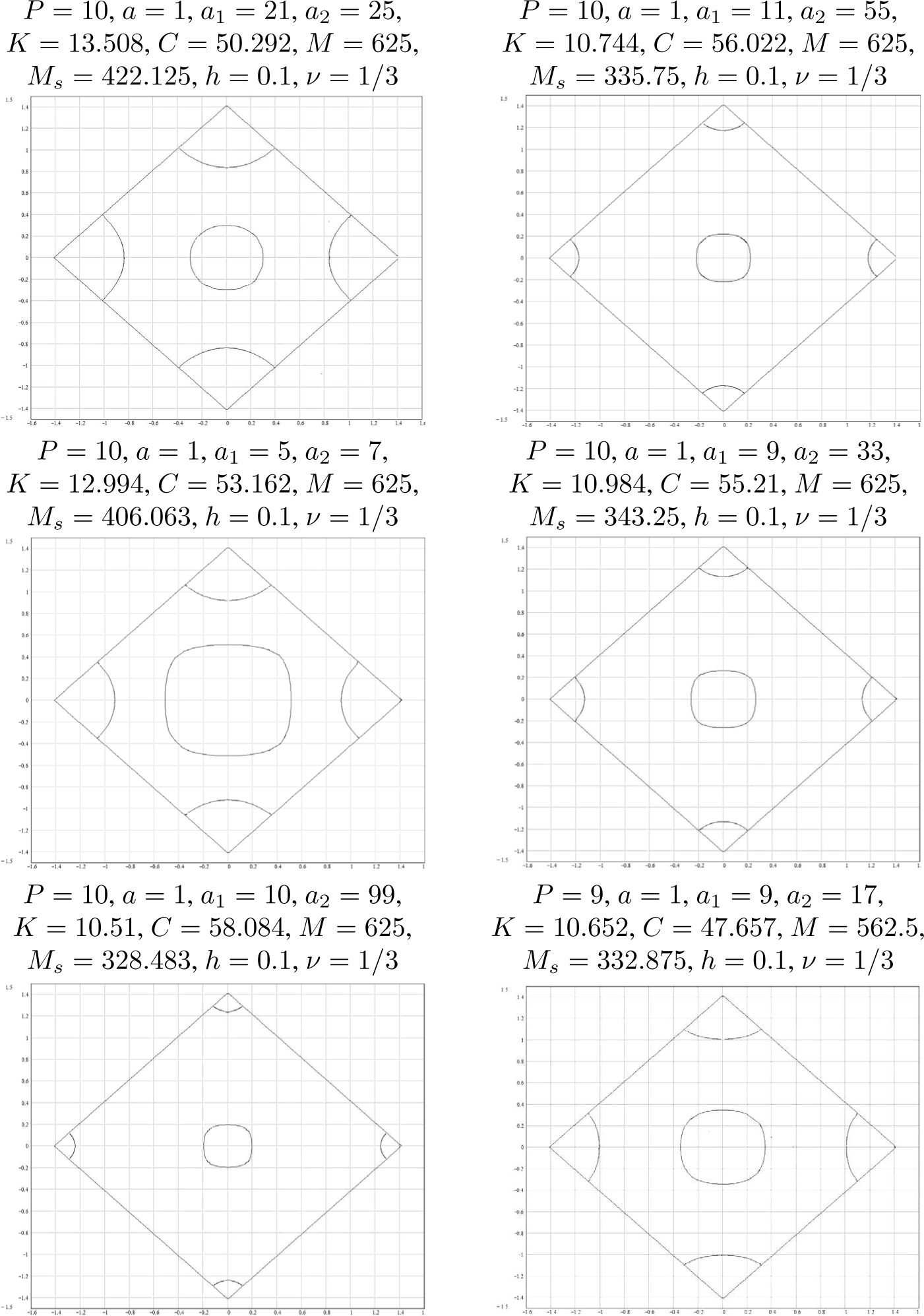
Graphs of a full-strength boundary for different parameter selections.
6. Conclusion
The most effective methods for studying the problem posed here turned out to be those of the theory of analytical functions of complex variables. Kolosov–Muskhelishvili formulas are used for investigating and the solution is written in quadratures. The unknown full-strength parts of the plate boundary are constructed. This problem is both of mechanics and of geometry since we search the shape of a hole in a plate and the conformal mapping function is used to define it.
The applications of elastic plates weakened by full-strength holes are of great interest in several areas of mechanical construction (building practice, mechanical engineering, shipbuilding, aircraft construction, etc).
Cherepanov [3, 4] proved that the tangential–normal stresses of a plate weakened by a hole with a full-strength contour is less than 40% of the maximum tangential–normal stress of a plate weakened by a circular hole.
Footnotes
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.