A thin-walled structure is homogeneously embeddable if it can be obtained by carving it out of a homogeneous material block or, in other words, if it is materially defect-free. Explicit analytic and geometric conditions for the embedded homogeneity of plane linearly elastic beams are derived and discussed. In the geometric setting, a prominent role is played by the properties of the hodograph of uniaxial material tensor fields defined on the beam axis.
By definition, the theories of beams and shells are formulated upon curves and surfaces embedded in a three-dimensional Euclidean space. In the most widespread version of shell theory, for example, the strain measures express the change brought about by the deformation on the first and second fundamental forms of the surface, while the internal static quantities consist of tensors of membrane forces and moments. Correspondingly, an elastic constitutive response is expressed in terms of functions relating these static quantities with the strain measures. Clearly, when viewed as an independent theory of an embedded elastic surface, questions of material symmetry, uniformity and homogeneity can be handled intrinsically, within the compass of the theory [1, 2, 3, 4]. Consider, however, a shell that has been cut from a perfectly homogeneous block. If, using the three-dimensional constitutive equations of this block, a relation between the above mentioned strain measures and the internal static quantities is obtained by a standard integration of the stress tensor over the thickness of the shell, two shell points may not turn out to be shell-wise materially isomorphic due to a lack of isotropy of the underlying material or, even when this material is isotropic, a possible mismatch between the curvature tensors. Placed under the microscope of a material scientist, on the other hand, no dislocations or other material imperfections will be detected.
These intuitive considerations lead to the following question: Given a constitutive law of an elastic shell in terms of forces, moments, membrane stretches and curvature changes, is it possible to ascertain the homogeneity or otherwise of the underlying material out of which the actual physical shell is made? We call this the embedded homogeneity problem. It has been already introduced, but not developed, in [2].
The problem will be first formulated in a purely analytic fashion. As one is wont to do in dislocation theories, however, a geometric formulation and interpretation, with their typical elegance and intuitive appeal, will also be provided. To facilitate the exposition and to emphasize the salient aspects of the theory, we will confine ourselves in this paper to linear elasticity and to the simplest of structures, viz. plane beams, leaving the treatment of spatial beams, membranes and shells for a forthcoming exposition.
2. Analytic formulation
Our point of departure is a two-dimensional planar sheet made of a homogeneous and linearly elastic material in a stress-free reference configuration. In a Cartesian coordinate system , the constitutive response is, therefore, completely characterized by a fourth-order constant tensor of components with the symmetries
Let now a curved beam be cut from this sheet with a middle axis described by the differentiable functions
assumed to represent an embedded submanifold (so that, in particular, the curve does not self-intersect). The parameter may be assumed to measure length along . For simplicity, we assume the normal thickness of the beam to be constant. In the Euler–Bernoulli formulation, normals to the beam axis are assumed to remain normal and unstretched throughout the deformation process. Under these conditions, the strain field in the beam is completely defined by means of two scalar fields and , measuring, respectively, the axial strain and the curvature change at a point of the beam axis. A straightforward integration of the two-dimensional stress field yields the constitutive equations of the beam in terms of the two formulas
and
In these equations, and are, respectively, the axial force and bending moment, is the curvature of the axis before deformation, and is a modulus of elasticity in the direction of the beam axis. It is worth pointing out that the functions and are universal, that is, independent of the elastic properties. Moreover, the elastic coefficient is obtained from the elastic constants of the sheet by means of the formula
where the summation convention in the range is enforced and where is the unit vector tangent to the beam axis. Its Cartesian components are
measuring, respectively, the cosine and the sine of the angle between the tangent line and the axis. More explicitly,
We conclude that if an elastic beam has been carved out from a homogeneous sheet its constitutive laws must necessarily have the forms (3) and (4) and, moreover, the coefficient must be in the linear hull of the five linearly independent functions .
Vice versa, assume that beam constitutive laws of the forms (3) and (4) have been specified in the definition of a (stress-free) beam as a self-sufficient structure, without any reference to an underlying material from which it might have been cut. The beam is, clearly, a two-dimensional entity, albeit represented in one dimension. Is this two-dimensional (“real”) beam homogeneous in the sense, for example, that it contains no defects? More precisely, does there exist a smooth extension of the field to a constant tensor field in an open neighbourhood of the beam? In light of the previous analysis, we must conclude that such a (not necessarily unique) extension exists if the function lies in the linear hull of the five basis functions just enumerated. If is analytic, this condition is equivalent to the vanishing of the Wronskian determinant associated with the six functions at play. (Note that, in view of the trigonometric identity , the Wronskian can be somewhat simplified.)
As intuitively predictable, if the function happens to be a constant , then an isotropic homogeneous extension always exists. Indeed, setting , where is an arbitrary constant, equation (7) is satisfied identically. On the other hand, unless carefully calibrated, an arbitrarily specified modulus will result in non-homogeneity. In a circular beam of radius , for instance, the specification
gives rise to a defect-free beam, whereas a linear dependence in does not!
3. The geometric picture
3.1. A preliminary exercise
When viewed in Cartesian components, symmetric tensors can be regarded as vectors in higher dimensional Euclidean spaces. If done appropriately, the correspondence between tensors and vectors can be made to preserve the inner product in a precise sense. Postponing for a moment the details of these transformations, the operation represented by equation ((5)) can be rigorously regarded as a projection of a vector of appropriate dimension on a given direction. These observations are heuristically sufficient to consider and solve the following elementary problem of two-dimensional Euclidean geometry.
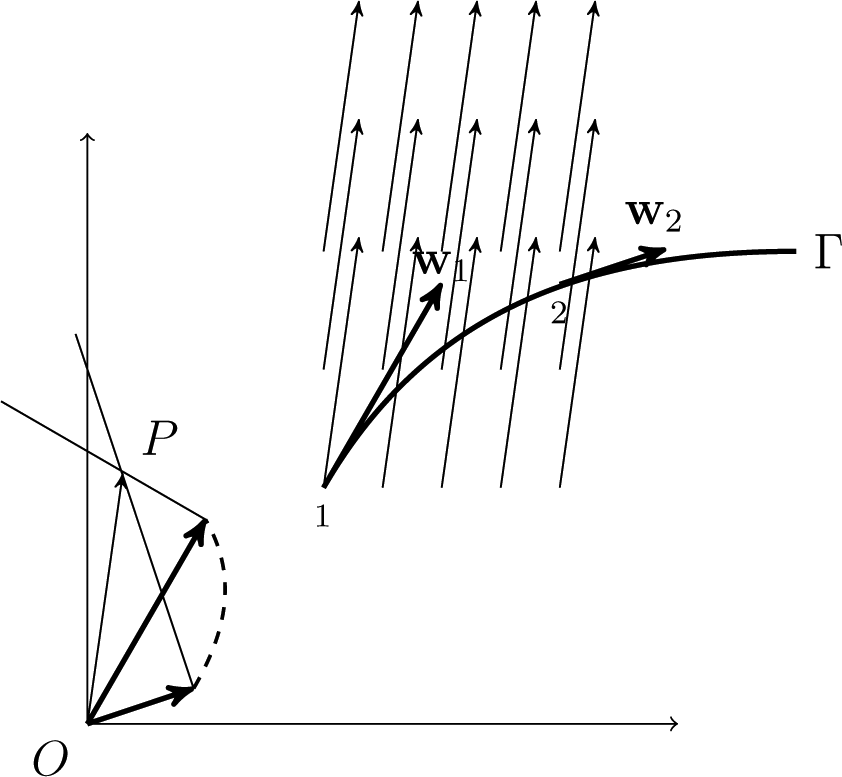
Problem 1. Given a curve in and a tangent vector field over , determine whether there exists a constant vector field over such that is the projection of on .
Solution: Figure 1 illustrates the statement of the problem. Let 1 and 2 be two distinct points on the curve and let and denote the respective tangent vectors. Translating these two vectors to the origin and drawing the respective perpendiculars at the vector tips, it is clear that their intersection defines the unique vector whose projection on the curve tangents at 1 and 2 delivers the vectors and , respectively. Since this construction can be carried out for any pair of points on , we conclude that a constant vector field with the desired property exists if, and only if, all the perpendiculars meet at one and the same point . The curve obtained by translating each vector to a common origin is known as the hodograph of the given vector field. We thus conclude that for the problem to have a solution the hodograph has to have the property that there exists a fixed point such that the lines joining each point of the hodograph with and with are mutually perpendicular. From elementary geometry, we know that this property is satisfied by a circular arc and that is a diameter. The hodograph is schematically shown as a dashed curve in the figure.
The projection problem.
This result can be generalized to a curve and its hodograph in an arbitrary number of dimensions, as stated in the following lemma.
Lemma 3.1.A nowhere vanishing tangent vector field defined on a differentiable curve in is the projection of a constant vector field if, and only if, the corresponding hodograph lies on a hyper-sphere containing the origin.
Proof. If denotes the position vector in , the equation of the hyper-sphere with centre at and radius is
where denotes the ordinary inner product in . If the hyper-sphere contains the origin, we must have . Let be a curve with (length) parameter and let be its unit tangent field. Then, a nowhere vanishing tangent vector field is uniquely represented as
where is a nowhere vanishing scalar field on . The hodograph is, therefore, the curve with equation
If this hodograph lies on a hyper-sphere containing the origin, there exists a fixed vector such that
which implies that
Conversely, given (whether or not it vanishes at some points), if equation (13) is satisfied for some fixed , the steps can be reversed to show that the hodograph lies on a hyper-sphere containing the origin. □
Note 1. If a given tangent vector field is of constant length , the hodograph further lies on a hyper-sphere with centre at the origin and radius . In the intersection of two circumferences consists of just two points, but in higher dimensions this intersection is a sphere of lower dimension so that one can construct vector fields of constant length on nontrivial curves enjoying the properties of the lemma.
3.2. The space and its linear isometry with
Let be the set of all second order tensors on an -dimensional inner product space . We define [5] the tensor product between and as a fourth-order tensor (a linear transformation from to itself) such that for all , where is the inner product in . Let us further define the inner product between two tensor products and as and the trace of a tensor product as .
The major transpose of a fourth-order tensor is defined by , for all . is said to have a major symmetry if . The first and second minor symmetries of are defined, respectively, by and , for all . It follows that .
If we choose an orthonormal basis , in , then any fourth-order tensor has the unique representation . The composition of two fourth-order tensors with respect to this basis is given by , the inner product between them is given by , and the (inner product induced) norm is given by . Note that for a unit vector , , since . Hence, is a unit fourth-order tensor. Thus, the Euclidean projection of on is given by
Let us fix . If a fourth-order tensor , based on , has all the major and minor symmetries, then the matrix with elements , where the Greek indices take the values 1 and 2, has the symmetries and the number of independent components of is six. We refer to the space of such symmetric fourth-order tensors in as . For ,
It is evident from this expression that one can construct a Euclidean-structure-preserving one-to-one mapping between the spaces and by associating the vector to the ordered six-tuple
In particular, the vector in associated with a unit tensor is
We now check that
thus confirming that our transformation of tensors into vectors indeed preserves the inner product.
3.3. Representation of uniaxial tensors
A uniaxial tensor is a decomposable fourth-order tensor of the form
where . If , we say that is a unit uniaxial tensor. The collection of all unit uniaxial tensors is, clearly, generated by the radii of the unit circle in . Thus, the representation of in is a closed curve , which we call the hodographic guide.
According to equation (15), regardless of the vector of departure, we have
By linearity, we conclude that all uniaxial tensors lie in a fixed (five-dimensional) hyperplane containing the origin. We call the fundamental hyperplane in . In particular, the hodographic guide belongs to this hyperplane.
Moreover, for any unit uniaxial tensor , we have
In other words, the hodographic guide lies in the hyperplane with equation . We may say, therefore, that the hodographic guide belongs to the four-dimensional plane .
Consider now the collection of all non-zero uniaxial tensors. By linearity, since the only missing degree of freedom in is the multiplication by a positive scalar, we conclude that the collection is mapped onto the two-dimensional cone subtended by . (Recall that the cone subtended by a subset of a vector space is defined as the collection of all vectors of the form , where and .) We call the hodographic cone.
We note that the unit vector with components
belongs to and forms a constant angle with all vectors arising from uniaxial tensors . Noting that a vector in the intersection must necessarily be of the form , where are arbitrary real numbers, we conclude that is perpendicular to . All the facts described above are summarized in the following lemma.
Lemma 3.2.The collection of all uniaxial fourth-order tensors in is mapped onto a cone of revolution of dimension 2 in whose axis is and whose normal cross section is .
3.4. Extension of the notion of hodograph to tensors
We will now extend the notion of hodograph to fourth-order tensor fields defined on plane curves. Let be a parametrized curve in , as defined in equation (2). A tangential fourth-order tensor field on , is a uniaxial tensor field of the form
where is a sufficiently differentiable scalar field on . Note that and, from previous results, it uniquely corresponds to a curve with position vector
where has components of the form prescribed by equation (15). We call the hodograph of the tangential field . We note that the hodograph may have cusps in correspondence with points of inflection of .
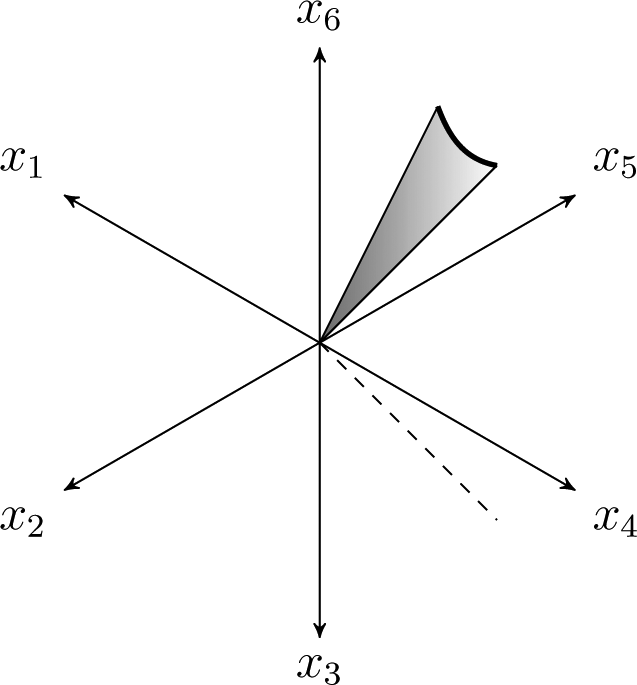
From the considerations of the previous section, we may state that all possible hodographs lie on the hodographic cone , as schematically represented in Figure 2.
Schematic representation of the hodographic cone.
3.5. Projected fields
Consider a special type of tangential field that arises from the Euclidean projection on of a constant field defined on a tubular neighbourhood of , i.e.,
where , , , , , and .
By Lemmas 3.1 and 3.2, we obtain the following theorem.
Theorem 3.3.A tangential fourth-order tensor field , defined on a curve in , is the Euclidean projection of a constant if, and only if, its hodograph is in the intersection of the hodographic cone with a four-dimensional sphere passing through the origin and contained in the fundamental hyperplane.
Since a beam with axial elasticity is homogeneously embeddable when the uniaxial tensor field is the projection of a constant field, we have, by means of this theorem, characterized geometrically the homogeneity of embedding for linearly elastic beams. We seek now to further characterize this property and to define measures of inhomogeneity by means of differential geometric properties of curves in .
3.6. Differential geometry of curves in
3.6.1. Generalized Serret–Frenet frames
The Serret–Frenet formulation for curves in has been generalized to curves in by the French mathematician Camille Jordan in 1874 [6]. If is an arc-length parametrized curve, with enough differentiability, then the set of vectors
if linearly independent, can be transformed into the orthonormal set of vectors
called the generalized Serret–Frenet frame, by the usual Gram–Schmidt process, where
and
The generalized curvatures are defined as
Then the generalized Serret–Frenet formula, in matrix form, is
The last generalized curvature corresponds to the torsion of a space curve in , because being identically zero guarantees the curve to lie on a hyperplane and vice versa. If , for some , we set and the procedure comes to an end.
As an example, consider the hodographic guide . Using initially the slope-angle of the unit vector as a parameter and differentiating equation (15), we find that the length parameter of (in ) is . Carrying out the successive differentiations indicated in expression ((24)) and implementing the Gram–Schmidt procedure described thereafter, we observe that the process must be stopped at the fourth step, indicating that the original six vectors are not linearly independent. The curvatures are constant along the curve and have the values , , and . The fact that (identically) implies that the curve lies in a four-dimensional plane (namely, ), as we already knew. The fact that , however, constitutes additional information and implies that the hodographic guide does not lie in a lower dimensional plane.
Curves of constant curvatures in have been studied in detail by [7, 8]. It can be shown that these curves lie on a four-sphere of radius
For the particular values of our curvatures, we obtain that . Moreover, general curves of constant curvature can be regarded as the superposition of two harmonic functions with different frequencies, and . Much in the same way as for Lissajous figures, these curves are closed if, and only if, the ratio between the two characteristic frequencies is rational. The frequencies are given by the formula
which, for the particular case of our , yields
thus confirming the obvious fact that, as defined by equation (15), the hodographic guide is indeed a closed curve (rather than a curve winding itself densely around a spherical zone).
3.6.2. Order of contact and osculating sphere
Let be a sufficiently smooth function which has a regular value zero. Then, it is known that is a hyper-surface, i.e. a submanifold of dimension (), of . The curve is said to have order contact at with a hyper-surface if
but . This definition is independent of parametrization. The osculating sphere at is the unique hyper-sphere with which the curve has order contact at . It has been shown [9] that, provided all are non-zero, the center of the osculating sphere at lies at
where , with, , being the curvature functions of , defined as
and, its radius is . Further, the osculating sphere at passes through the origin if , or
3.6.3. Sphericity of curves
The curve is spherical, i.e. lies on a hyper-sphere, if the locus of the centres of the osculating spheres along the curve is a point. The necessary and sufficient condition [9] for this to happen, assuming sufficient smoothness of and no zero for any , is that
identically. Note that this condition guarantees contacts of at least order with the hyper-sphere at all points on the curve. We say that the curve is locally spherical at a point if (35) is satisfied at .
Note 2. If the curve is hyper-planar, i.e. if identically, then and do not appear in the above conditions. Also, the definition of the osculating sphere only demands contact of order and sphericity of a curve demands contacts of order at least at all points.
If is the hyper-planar hodograph in of an everywhere non-vanishing tangential field , then the condition (34) reduces to
The condition of local sphericity of the hodograph at some explicitly reads
In this equation, we have used the superscript to indicate differentiation with respect to the arc-length parameter measured along the hodograph, which is in general different from the length parameter along the original curve .
Note 3. Measure of embedded inhomogeneity: Let the axis of a planar elastic beam be given by the arc-length parametrized curve , and let be the elastic modulus satisfying equations (3) and (4). Assuming sufficient smoothness of and so that all the generalized curvatures of the hodograph , except , are non-zero and sufficiently smooth, a non-zero value of the left-hand side of (36) at provides a measure of local embedded inhomogeneity of the beam at , provided (37) is satisfied thereat.
4. Final thoughts on embedded homogeneity
A planar beam is a slender solid body in which one dimension (the beam axis) predominates over the other two (the cross section). If the beam is linearly elastic, its constitutive response is expressed in terms of linear relations between stresses and strains. The question we ask is whether a given stress-free configuration of the rod is homogeneous or not. Given a small sample of the beam, a material scientist would not take into consideration any theorized one-dimensional model of the original three-dimensional beam, but rather look for any detectable presence, under the microscope, of micro-structural defects in the solid rod.
But in classical structural theories, a linearly elastic beam is understood as a pair of objects, namely, a curve and an elasticity modulus field to be entered in equations such as ((3)) and ((4)). To give a mathematical representation of the physical idea of homogeneity, rather than that of the mathematical construct arising from the structural one-dimensional model, we proposed the notion of embedded homogeneity. In simple terms, we state that a planar beam is physically homogeneous if the plane curve can be embedded into a homogeneous planar elastic domain in such a way that, after performing the standard thickness-wise integration of the stresses, we recover the given structural model. The conditions for this kind of homogeneity, namely the physically observable one, consist of a subtle interplay between the geometry of the curve, on the one hand, and the elastic modulus field, on the other. When expressed analytically, these conditions can be encompassed in the vanishing of a sixth-order Wronskian determinant involving the function and five fixed basis functions arising from the shape of the beam axis.
As expected in a theory of continuous distributions of defects, the homogeneity conditions bear also a differential-geometric interpretation. A surprising feature of this interpretation is the appearance of the hodograph curve in associated with an isometric vectorial representation of the inner-product space of symmetric fourth-order tensors in . It turns out that a curve in gives rise to a two-dimensional cone in which is the carrier of the hodographs associated with all possible uniaxial fourth-order tangent tensor fields defined on that curve. A no less surprising feature of the geometric interpretation is that the beam is physically homogeneous if, and only if, its hodograph belongs to a four-dimensional sphere containing the origin of . On the basis of this result, it is possible to construct local measures of inhomogeneity by measuring both the degree of contact of the curve with its osculating sphere and the distance of this sphere from the origin. The generalization of these ideas to spatial beams and to shells, while fraught with difficulties, will follow similar lines and open new perspectives in the field of dislocation theory.
Footnotes
Funding
The authors gratefully acknowledge the support of the Natural Sciences and Engineering Research Council of Canada and the Shastri Indo-Canadian Institute.
References
1.
WangC-C. Material uniformity and homogeneity in shells. Arch Ration Mech Anal1972; 47: 343–368.
2.
EpsteinMDe LeónM. On uniformity of shells. Int J Sol Struct1998: 35(17): 2173–2182.
3.
SteigmannD. Fluid films with curvature elasticity. Arch Ration Mech Anal1999: 150(2): 127–152.
4.
EremeyevVAPietraszkiewiczW. Local symmetry group in the general theory of elastic shells, J Elasticity2006; 85(2): 125–152.
5.
ŠilhavýM. The Mechanics and Thermodynamics of Continuous Media. New York: Springer-Verlag, 1997.
6.
JordanC. Sur la théorie des courbes dans l’espace àn dimensions, C R Acad Sci Paris1874; 79: 795–797.