We consider three different compressible versions of the conventional incompressible neo-Hookean material model. The different versions are not new and have been used in various model studies. They each give neo-Hookean behavior in an appropriate incompressible limit. The three versions each show some basic differences with respect to each other as regards the qualitative nature of the approach to the neo-Hookean limit. The purpose of this study is to exhibit these differences.
Often for the purposes of numerical computation, it is useful to develop compressible constitutive models that correspond to an existing incompressible material model. Typically, this is because an incompressible constitutive treatment may be well motivated by virtue of many materials giving an essentially incompressible response for expected mechanical loadings over standard time scales, coupled with the theoretical advantages offered by an incompressible treatment. However, once the inquiry reaches a stage where detailed computation is necessary, numerical implementation of such models generally requires a treatment where the incompressibility constraint is not enforced kinematically (as in the theoretical investigation) but is instead achieved in an approximate sense by kinetic considerations involving the relation between stress and deformation for the compressible theory [1,2]. This also has the beneficial effect of bringing the inquiry full circle by acknowledging whatever small compressibility is present in the material under study. Consequently, a variety of studies have examined the connection between truly incompressible theories and corresponding compressible theories that are nearly incompressible (see, e.g., [3–5], additional specific reference connections are developed in what follows).
Our aim here is to contrast some of the qualitative differences in the way in which this incompressible limit is attained for the various models. For this purpose we focus on the most well-known hyperelastic material, the neo-Hookean model [6–8]. While this is interesting in its own right, the real motivation for doing so is twofold. First, the type of methods and observations presented here are not tied to neo-Hookean behavior, and hence could be utilized for any hyperelastic incompressible material model. Even more significant, the neo-Hookean model, while itself being a model for an isotropic hyperelastic solid, often participates as a component part in a broader constitutive model that seeks to encompass a wider range of physical effects. Such effects include: polymer scission and reformation [9], fiber reinforcement [10], tissue growth [11], tissue remodeling [12], cavitation [13], material swelling [14], other porosity effects [15], material degradation [16], and chemomechanics [17]. All of the just indicated references involve modeling with a prescribed volume constraint such that there is a neo-Hookean-type term in at least part of the constitutive treatment. In a similar fashion, the combination of such effects can be considered (e.g. swelling + fibers [18], swelling + cavitation [19], swelling + degradation [20], fibers + degradation [21]). Modifying the neo-Hookean-type term in these treatments by the type of procedures described here is a logical means for interjecting a small amount of compressibility into these theories.
Incompressible hyperelasticity restricts attention to isochoric deformations; hence, J = 1 where J≡ detF and F is the deformation gradient. The stored energy density for the neo-Hookean material in the incompressible theory is
where I1 is the trace of C≡FTF (the right Cauchy–Green tensor). The constraint J = 1 then restricts I1 ≥ 3. The Cauchy stress for a neo-Hookean material is given by
where B≡FFT (the left Cauchy–Green tensor) and I is the identity tensor. Here we write preac for the reactive constraint pressure associated with the isochoric motion constraint J = 1. This enables us to reserve the use of p for a state of hydrostatic Cauchy stress T = −pI. The constant μ corresponds to the shear modulus for small strains. This is because a simple shearing deformation
gives T12 = μγ where T12≡e1·Te2 is the shear stress and γ is the amount of shear. For the neo-Hookean material the relation between T12 and γ is linear. Other incompressible isotropic hyperelastic models give a nonlinear relation between T12 and γ. When that occurs the infinitesimal shear modulus is defined to be dT12/dγ evaluated at γ = 0. This correctly correlates such a quantity with the shear modulus from the small strain theory.
In making a corresponding compressible treatment it is natural to consider compressible models with strain energy density of the form W(I1, J) where these functions have the property that W(I1, 1) = WnH(I1) (see [22]). Three such functional forms, or templates, that give W(I1, 1) = WnH(I1) are the following:
where a1 and a2 are adjustable constants;
where b1 and b2 are adjustable constants; and
where c1 and c2 are adjustable constants. It is to be noted that the basic template forms govern the possibilities for universal relations beyond the standard ones that are ensured by isotropic hyperelasticity [23–25].
The next section opens with a short review of key results from the compressible theory. For each of the template forms this leads to a unique natural choice for the adjustable constants in terms of the conventional elastic constants from the small strain theory, and the resulting model forms are connected to previously considered hyperelastic models (Section 2.2). Section 2 concludes with an examination of the resulting simple shear and pressure-volume response. Section 3 looks into the qualitative form of the constant energy contours in the (I1, J)-plane. Of specific interest here is the way in which these curves exhibit qualitatively different convergence properties in the incompressible limit. Section 4 discusses the consequences of this qualitatively different convergence for uniaxial loading. Section 5 then provides some final discussion.
2. Compressible W(I1, J) materials
Before turning our attention to the particular template forms given above, a few general remarks are provided that are appropriate to any compressible hyperelastic model with W = W(I1, J). The principle stretches λ1, λ2 and λ3 are the square roots of the eigenvalues of C and
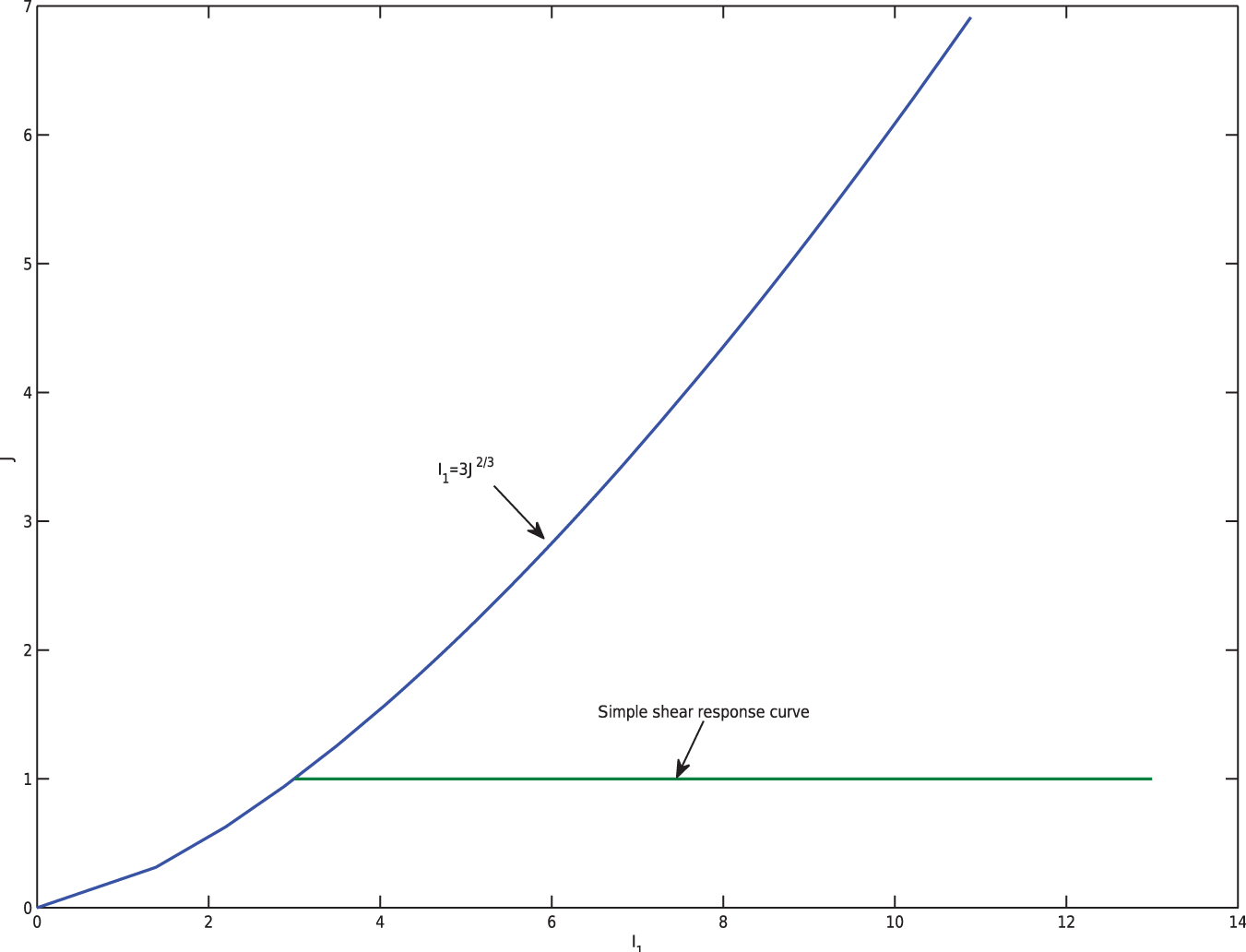
For incompressible materials J = 1 and this limits I1 to the range I1 ≥ 3. For compressible materials J can take on all positive values. For each J>0 the possible range for I1 is I1 ≥ 3J2/3 (see [26]). This effective domain is shown on the right-hand side of the blue curve in Figure 1. The boundary of is
The area on the right of the blue solid curve in the first quadrant is the effective domain for (I1, J). The left bound is the solid blue curve I1=3J2/3, which is also the curve for pure pressure loading. The curve for simple shear is the horizontal line J=1 starting from the left bound point where I1=3.
The point on this curve (I1, J) = (3, 1) corresponds to the reference configuration in which λ1 = λ2 = λ3 = 1.
In general, for a W(I1, J) compressible model the Cauchy stress tensor is
A requirement that if F = I, then T = 0 (the second-order zero tensor), in other words, that the undeformed configuration is stress free, gives
2.1. Pressure loading
Consider pure pressure loading T = −pI with symmetric deformation states F = J1/3I. Then I1 = 3J2/3 and it further follows from (2.3) that p is related to J via
This expression directly establishes that
The appropriate correlation to the bulk modulus from the infinitesimal strain theory is given by the derivative evaluated at J = 1. Let κ denote this infinitesimal theory bulk modulus, hence
2.2. Consequences for Wa, Wb and Wc
Return now to the three template forms (1.4)–(1.6), each of which has two fitting parameters. It shall now be required that these fitting parameters are to be chosen so as to provide consistency with (2.4) and (2.7).
For Wa(I1, J) in (1.4) these two conditions will hold if and only if
For Wb(I1, J) in (1.5) these two conditions will hold if and only if
For Wc(I1, J) in (1.6) these two conditions will hold if and only if
The above parameter values will be used consistently in the following development. This gives the following three model stored energy densities:
By construction, each of the hyperelastic material models (2.11)–(2.13) will behave for small strains like an isotropic linear elastic model with bulk modulus κ. The equivalent of model Wa is proposed in [27] and [28]; this form is subsequently considered in [29–31]. Model Wb, with its term of the form I1/J2/3, is motivated by considerations discussed by Flory in [32] so as to separate the pure volumetric effect from the other aspects of the deformation. Such considerations are subsequently invoked in [22, 33–36]. The works [37, 38] explore some commonly used volumetric parts, some of which are similar to that in Wb. The basis for model Wc follows from [39]; this model is subsequently mentioned in [30] and used in [40, 41].
Here it is useful to remark that the original templates (1.4) and (1.6) for Wa and Wc are of the form W(I1, J) = WnH(I1) + ψ(J) = μ/2(I1−3) + ψ(J) with two different template expressions for ψ(J). Such models are special forms of the general Blatz–Ko material model [42, 43]. After choosing the fitting parameters to be consistent with (2.4) and (2.7) such models require that the derivative of the function ψ(J) obey ψ′(1) = −μ. Hence, these ψ(J) are not minimized at J = 1. Thus, in neither case does the function ψ(J) by itself provide a straightforward penalization of volume departure from J = 1. In contrast the model (2.12) for Wb is of the alternative form W(I1, J) = WnH(I1/J2/3) + ψ(J), which is not a Blatz–Ko form, and this ψ(J) is minimized at J = 1.
2.3. Simple shear response
The simple shearing deformation (1.3) generates right Cauchy–Green deformation tensor
in turn giving J = 1 and I1 = 3 +γ2. In the (I1, J)-plane of Figure 1 the curve for simple shear response is the horizontal line J = 1 with I1 ≥ 3. For this deformation it follows from (2.3) that the Cauchy stress for the three models (2.11)–(2.13) is given by
Recall that the Poynting relation does not allow the simultaneous vanishing of all normal stress components in simple shear with nonzero γ. Here the model Wb gives T11 = 2μγ2/3>0 and T22 = T33 = −μγ2/3 < 0. Conversely the models Wa and Wc both give T11 = μγ2>0 and T22 = T33 = 0. The two different forms for the simple shear deformation stress tensor in (2.15) match exactly with the general neo-Hookean result (1.2) upon suitable choice of the neo-Hookean reactive pressure preac. Turning to the shear stress T12, in all three compressible models T12 = μγ which is the same relation as that for a neo-Hookean material. This also gives that
which in turn confirms that μ in all three models (2.11)–(2.13) corresponds to the infinitesimal strain shear modulus.
This formally establishes that the κ and μ in all three models (2.11)–(2.13) correspond to the bulk and shear modulus from the infinitesimal theory. It therefore follows that all other isotropic elastic constants can be determined a priori from these moduli. For example, a finite deformation uniaxial load analysis suitably linearized to the small strain regime will of necessity predict Young’s modulus E = 9κμ/(3κ + μ) and Poisson’s ratio ν = (3κ − 2μ)/(6κ + 2μ). We remark that our usage of the symbols μ, κ, E and ν is restricted to denoting the various linear elasticity constants from the isotropic theory. While the hyperelastic theory naturally lends itself to generalizing these constants to functions of stretch [31, 43], we do not pursue such a generalization here.
In what follows it will occasionally be useful to normalize by shear modulus μ and we shall use overbar to indicate this. For example:
Then
and the incompressible limit corresponds to or, equivalently, ν→ 1/2. Although the admissible thermodynamic range for the Poisson ratio is −1 ≤ ν ≤ 1/2 recall that the standard range for consideration is 0 ≤ ν ≤ 1/2 and, hence, . This standard range will be considered in what follows.
2.4. Pressure-volume behavior for Wa, Wb and Wc
Consider now the pressure-volume behavior for the three models Wa, Wb and Wc presented in (2.11)–(2.13). By virtue of the definition of the function in (2.5) it follows that
and
and
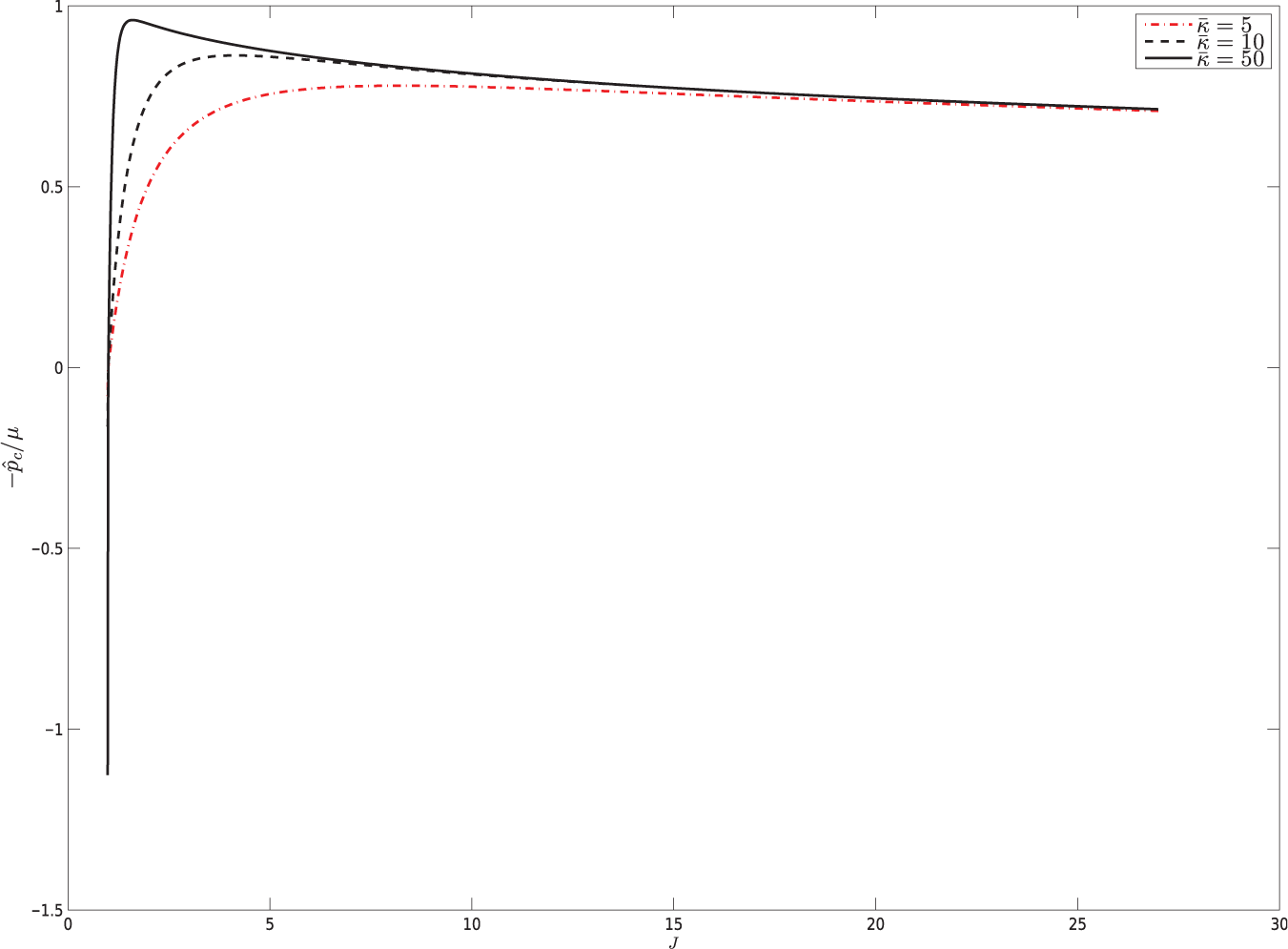
By construction, all three functions obey and all have slope . Further, one can show that both and are monotonically increasing with J such that as J→ 0 and as J→∞. This behavior is consistent with all reasonable expectations.1 In contrast, the function , while also obeying as J→ 0, does not go to infinity with J. Instead has a local maximum at the value
After attaining its maximum value at the function is subsequently monotonically decreasing in J and asymptotes to the J-axis as J→∞. This aspect is true for all κ. Furthermore, as κ tends to infinity the value approaches 1 and the value approaches μ.
Thus, as κ→∞ the graph of the functions and tend to that of a vertical line at J = 1. In contrast, the graph of tends to a graph that consists of two parts that connect to each other at J = 1, . One part is a vertical ray with endpoint J = 1, that then proceeds to . The other part is a curve expressed by with starting point at J = 1, (Figure 2).
Plot of versus J for pure pressure load at various = κ/μ. In the limit as κ → ∞ the curve tends to a two-part graph. The first part is a vertical line segment through J = 1 that ends at = 1, and the second part is the monotonically
decreasing function 1/J1/3. The two parts connect at = 1. The other two models Wa and Wb give a more conventional monotonic behavior that approaches the vertical line J = 1 as → ∞.
3. Energy contours
Consider the level curves of W(I1, J) in the admissible region . Note that, for all three models Wa, Wb and Wc, the energy density continues to be defined on the full quadrant. When discussing behavior near the boundary of it is often useful to imagine continuing the curves of constant W out of while still in . Specifically, it is useful to describe the way in which the level curves “cut”.
Recall that corresponds to F = J1/3I and, hence, pressure loading. Let and correspond respectively to the J ≥ 1 and J ≤ 1 parts of . The intersection of these two parts is the point (I1, J) = (3,1) corresponding to the reference state. All three energy densities Wa, Wb and Wc have been constructed such that the reference configuration point (I1, J) = (3, 1) gives W = 0.
For all three models Wa, Wb and Wc it follows that W increases with J on the boundary portion . This is an immediate consequence of (2.6) because all three functions , , and are negative for J>1. Similarly, because all three functions , and are positive for J < 1, it follows from (2.6) that all of these W functions increase as J decreases on the boundary portion . In particular, on it follows that
and
and
Thus, as J→∞ on all three model energy functions Wa, Wb and Wc tend to infinity. Also, as J→ 0 on all three model energy functions Wa, Wb and Wc again tend to infinity.
Consider Wa(I1, J). Then for any fixed number w>0 there exists a unique location on such that Wa = w. Similarly there exists a unique location on such that Wa = w. This permits the definition of functions and obeying and such that locates the position on where Wa = w and locates the position on where Wa = w. The following characterization of the level sets of energy is then immediate:
The locus ofmaking Wa(I1, J) = w is a single-level curve with one endpoint onas located byand the other endpoint onas located by. There exists a functiondefined onsuch that this level curve is given by
Proof. Fix w>0 and . The value of J then locates a unique point . At this point Wa ≤ w with equality only if J corresponds to one of the endpoints, either or . Now consider a horizontal path in beginning from . It follows from (2.11) that Wa(I1, J) →∞ as I1→∞. Thus, by continuity, there exists one or more roots I1 to the equation Wa(I1, J) = w for I1 ≥ 3J2/3. Wa is monotonically increasing with respect to I1 since ∂Wa/∂I1>0 and hence any such root is unique. This unique root defines the value of the function .
Corresponding results apply for the models Wb(I1, J) and Wc(I1, J). In particular, there exists a function such that the locus Wb(I1, J) = w>0 is described by on the appropriate J-interval (which is again determined by the level set endpoints on ). A corresponding function also exists for describing the locus Wc(I1, J) = w>0.□
Of interest is the slope of the level set curves in the (I1, J)-plane. Differentiation of W(I1, J) = w gives
We have here chosen to work with dJ/dI1 because I1 is the abscissa (horizontal axis) and J is the ordinate (vertical axis) in our (I1, J)-diagrams. For the three model materials Wa, Wb, Wc the reciprocal of this slope, i.e. dI1/dJ, is formally the partial derivative of the corresponding function , or whose existence has just been demonstrated.
Consider the level set for W(I1, J) = 0. For Wa, Wb and Wc the previous considerations show that the intersection of this level set with consists of only the single reference configuration point (I1, J) = (3, 1). This point is on . However, the set W(I1, J) = 0 will still continue into the quadrant as a curve. More generally, the slope of the level set curve passing through the reference configuration point (I1, J) = (3,1) can be evaluated from (3.5) using the stress-free reference configuration requirement (2.4). This gives dJ/dI1 = 1/2. On the other hand, consider the slope of the curve (which is not a level set curve) at (I1, J) = (3,1). It follows from differentiation of (2.2) that the slope of the curve is dJ/dI1 = J1/3/2. At (I1, J) = (3,1) this slope evaluates to dJ/dI1 = 1/2, the same value as the level set curve passing through that point. Thus the algebraic condition (2.4) has an immediate interpretation in terms of the geometry of the level set curves. Namely
The reference configuration is stress free if and only if the energy contour inpassing through the reference location point (I1, J) = (3, 1) osculates the boundaryof the admissible region at that point.
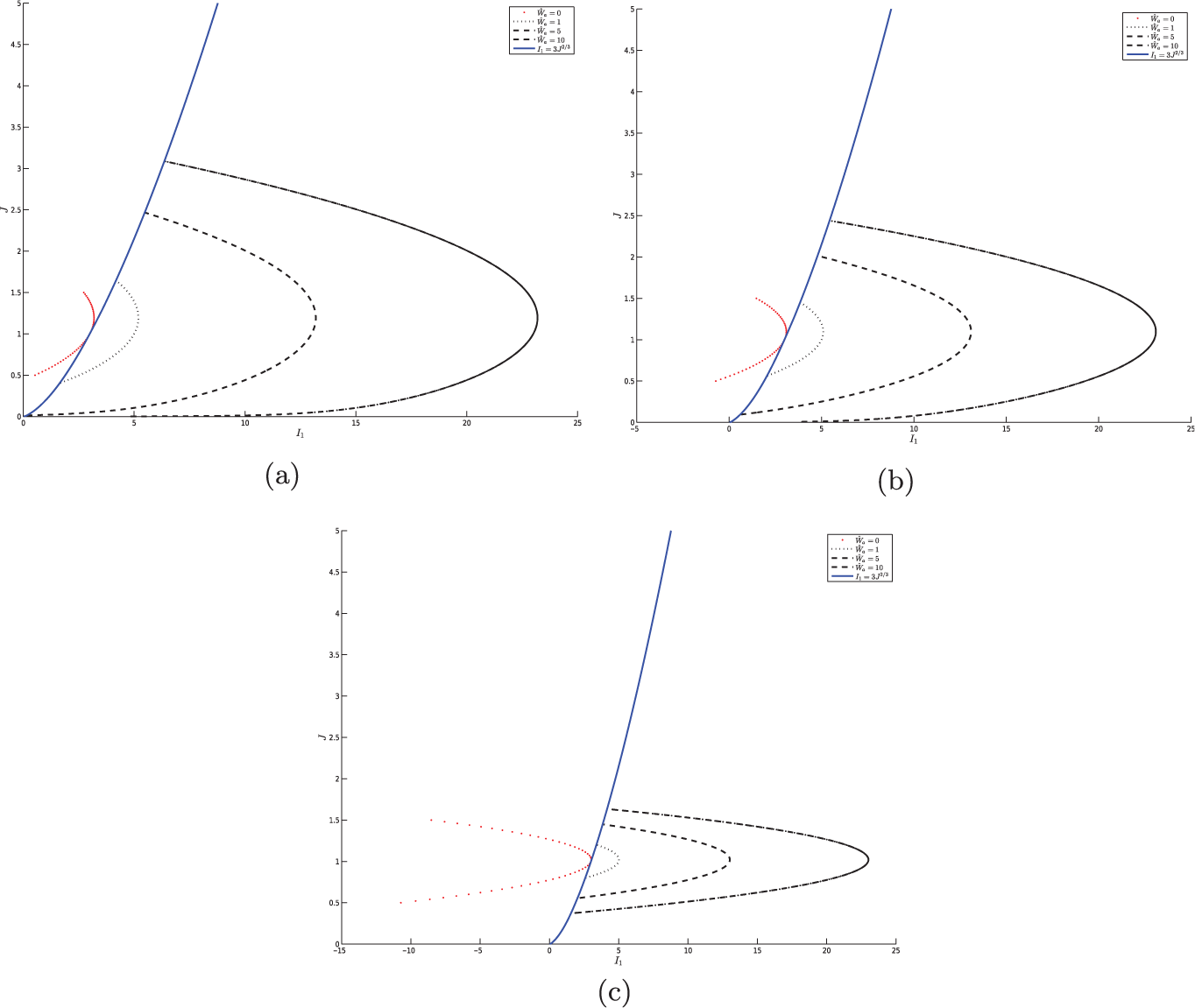
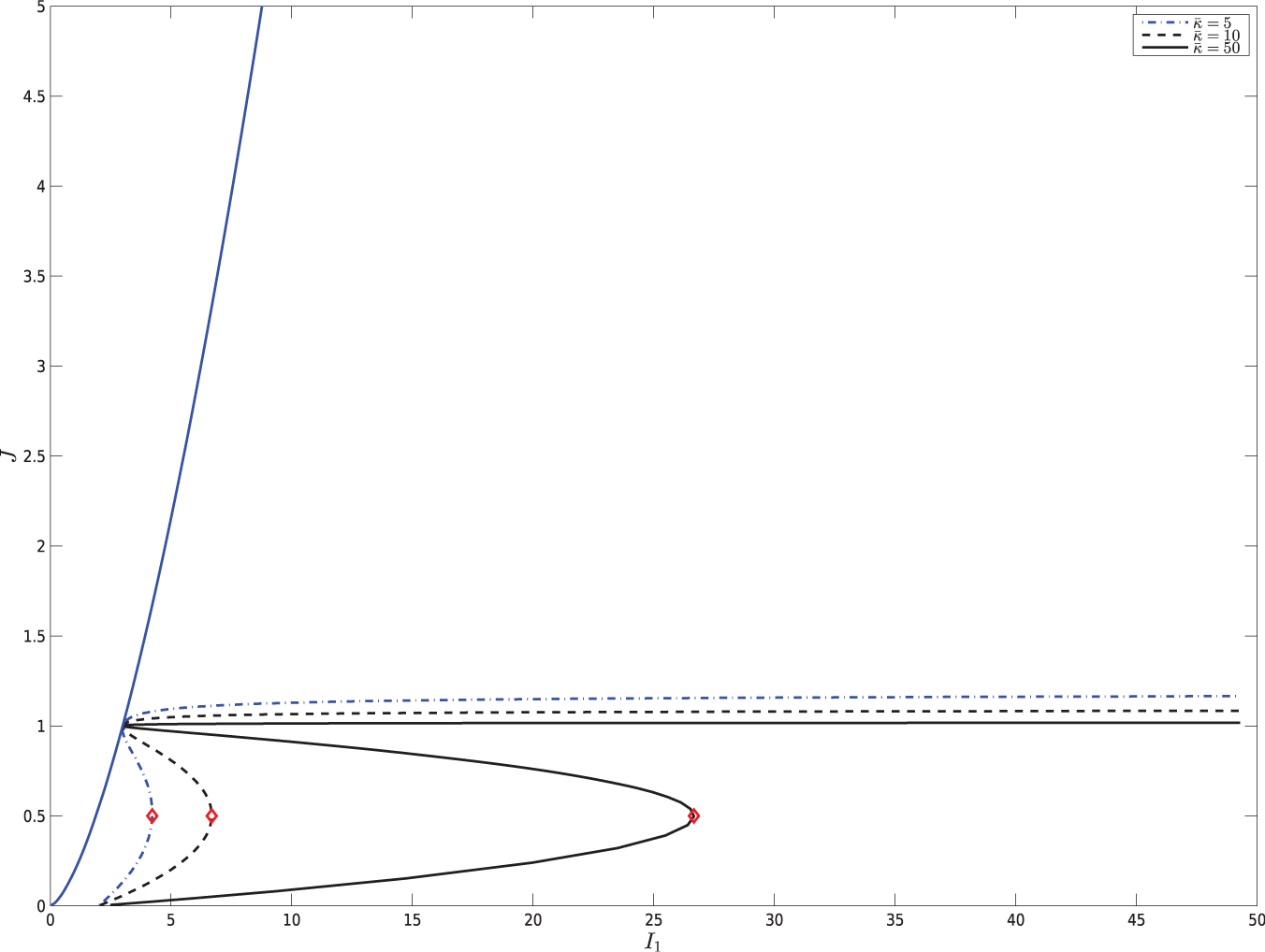
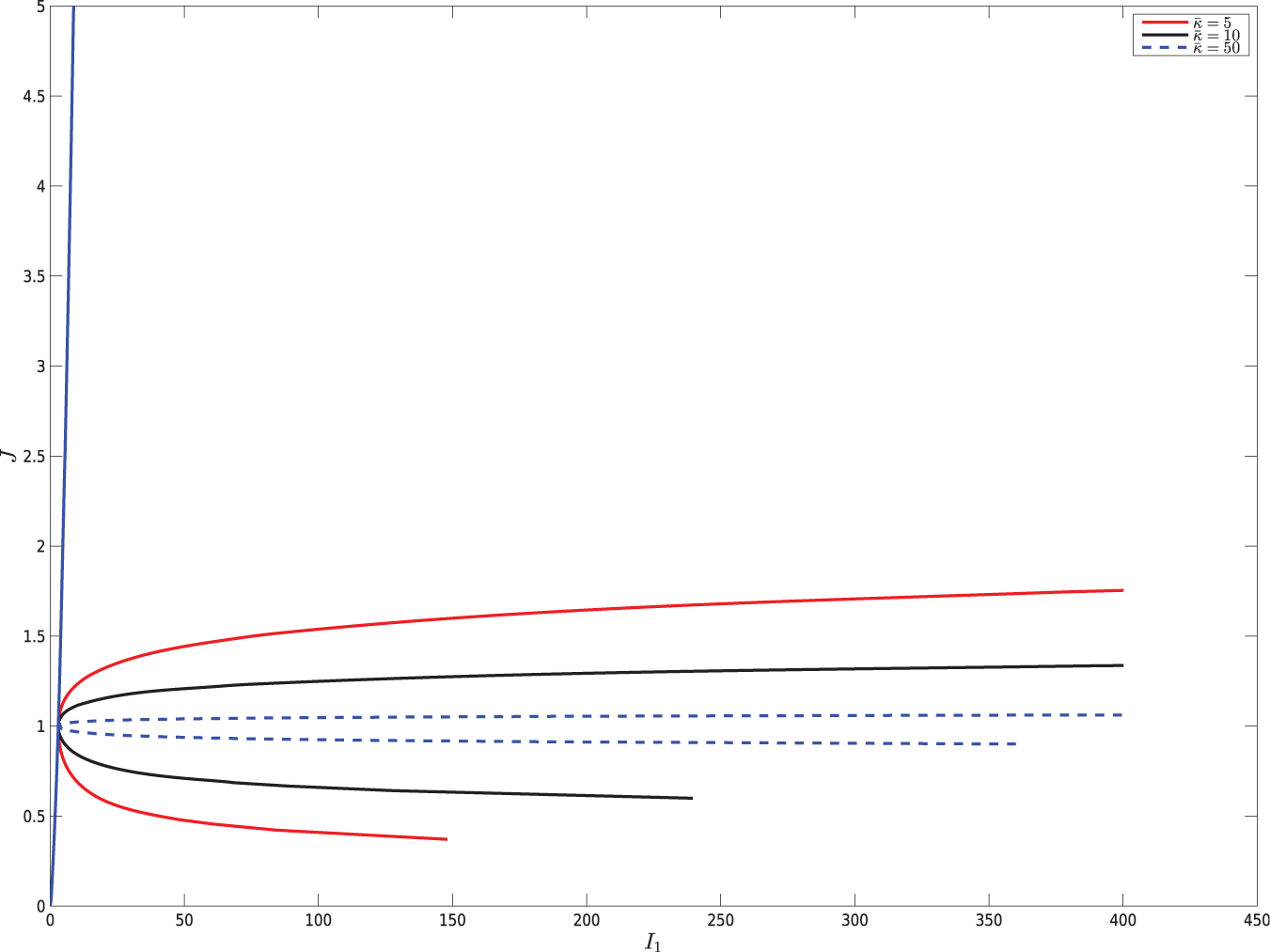
Figure 3 displays energy contours in the (I1, J) plane for Wa. Each subfigure corresponds to a different value of κ using normalizations and . As required, for each the contour is tangent to the boundary of the admissible region at the point (I1, J) = (3, 1). For each fixed w>0 the contour begins on at . As J increases the contour proceeds into such that I1 increases as the contour continues through J = 1. It reaches a maximum I1 value at . After this I1 decreases with J as the contour returns to the part of at . For a fixed w>0 if one considers a sequence of increasing , then the corresponding sequence of contours will narrow and approach points on the line segment {(I1, J) : 3 ≤ I1 ≤ 3 + 2w/μ, J = 1} in the limit as . Note that the endpoint I1 = 3 + 2w/μ causes this result to coincide with that of the neo-Hookean material (1.1).
The (I1, J) contours of normalized energy = for various = κ/μ (a) = 5; (b) = 10; (c) = 50. The contour = 0 is tangent to the bound curve I1=3J2/3 at (I1, J) = (3, 1). Each contour has a maximum of I1 and this maximum occurs at a common value of J that depends upon , but does not depend upon the value of . Each fixed contour narrows as increases such that the contour sequence collapses onto the incompressible ray J = 1 in the limit → ∞.
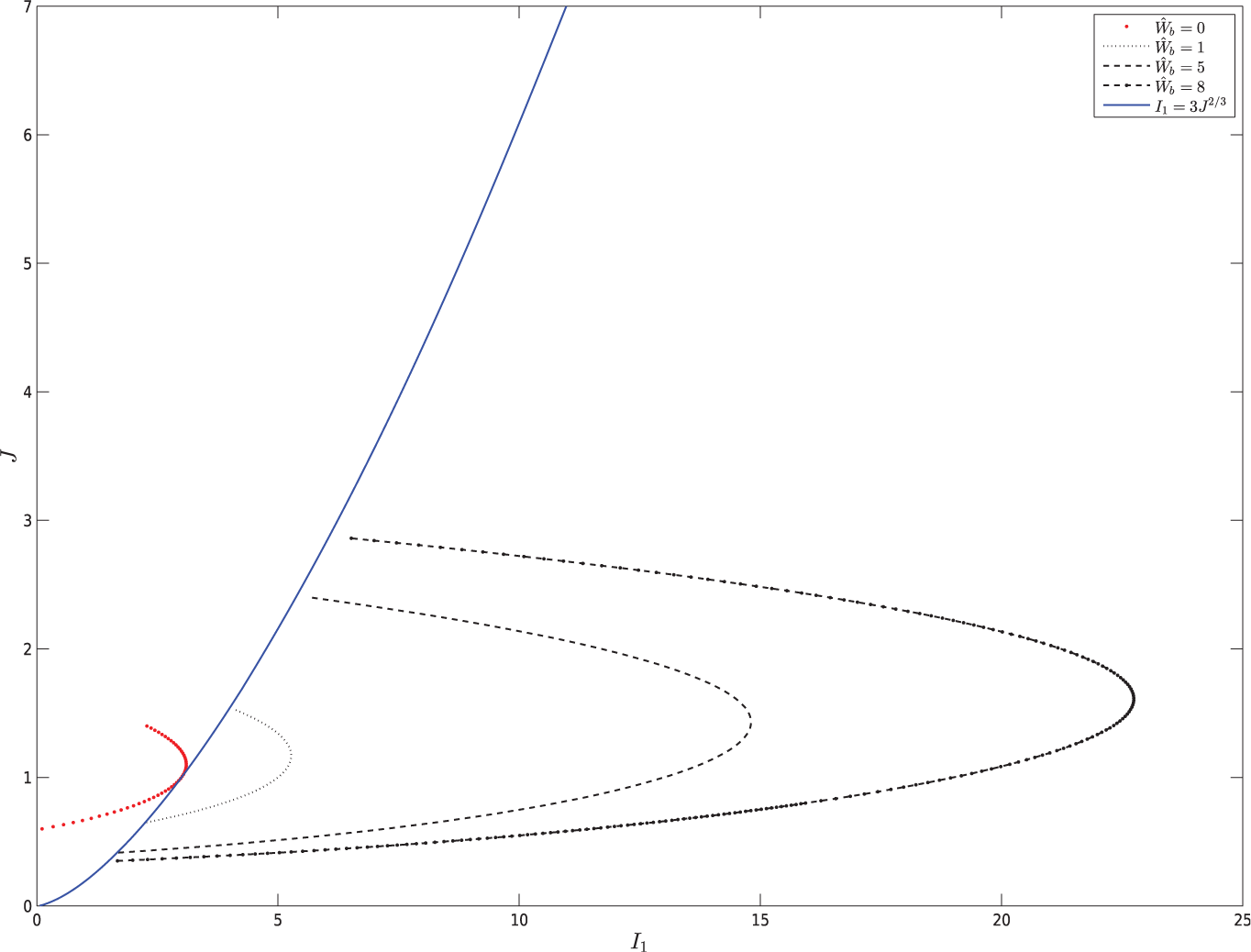
The form of the constant Wb contours is similar to those displayed for the Wa material as shown in Figure 4 for . In particular, for each fixed w>0 the contour begins on at . As J increases the contour proceeds into such that I1 increases as the contour continues through J = 1. It again reaches a maximum I1 value but now, unlike the Wa contours where the J corresponding to this I1 maximum was the same for all w, the special J value that gives the I1 maximum is found to vary with w. It is again found that these contours converge onto the line segment {(I1, J) : 3 ≤ I1 ≤ 3 + 2w/μ, J = 1} as .
The (I1, J) contours of normalized energy = Wb/μ for = 10. The form of the contours is similar to those for the Wa model (compare with Figure 3(b)).
Figure 5 shows the energy contours in the (I1, J) plane for the energy Wc. The appearance of the fixed w>0 contours in this figure is different from those in Figures 3 and 4. Namely, after each such contour begins on at one finds that this curve first proceeds at almost constant J for some range of I1. It then experiences a rather abrupt turn so as to next proceed at almost constant I1 as it returns to at . This behavior becomes more pronounced for large . Unlike the constant energy contours for Wa and Wb one finds for Wc that I1 is continuously increasing for all J. Hence, the maximum I1 value on each constant Wc contour occurs at the endpoint with where the curve makes contact with . For a fixed w > 0 if one considers a sequence of increasing then the corresponding sequence of Wc = w contours does not collapse onto a finite line segment {(I1, J) : 3 ≤ I1 ≤ 3 + 2w/μ, J = 1}. Instead the sequence of contours collapses onto a two-part curve. One part of this limiting curve is indeed the aforementioned horizontal line segment {(I1, J) : 3 ≤ I1 ≤ 3 + 2w/μ, J = 1}. However, the second part of this limiting curve is the vertical line segment {(I1, J) : I1 = 3 + 2w/μ, 1 ≤ J ≤ (1 + 2w/3μ)3/2}.
The (I1, J) contours of normalized energy = Wc/μ for various = κ/μ: (a) = 5; (b) = 10; (c) = 50. The contour = 0 is tangent to the bound curve I1=3J2/3 at (I1, J) = (3, 1). Each fixed contour tends toward a two-part curve as increases: the first part collapses onto the incompressible ray J = 1 while the second part approaches a vertical line segment.
This last result may be understood by observing that (2.6) in conjunction with W(3, 1) = 0 indicates that the value of W on the boundary is the area under the curve between J = 1 and the J value for the point under consideration on (this area is positive both for locations on and for locations on ). We recall that in the limit the graphs of the functions and approach a vertical line at J = 1. For any J≠ 1 this causes the area under the graph to approach infinity. Hence, the four functions , , , all approach J = 1 as at fixed w. This in turn causes the endpoints and the endpoints of the constant W contours to collapse onto (I1, J) = (3, 1) so as to squeeze the limiting contour onto the line J = 1. However, the same argument only partially applies to the Wc model because the graph of the function only approaches the vertical line J = 1 for values J ≤ 1. The above argument therefore applies to values J < 1 on which is . This generates the horizontal portion {(I1, J) : 3 ≤ I1 ≤ 3 + 2w/μ, J = 1} of the two-part limiting constant Wc contour. However, because approaches the function μ/J1/3 for J>1 in the limit it is no longer the case that theendpoint approaches J = 1 in this limit. Instead a separate analysis based on the area under the curve μ/J1/3 shows that this will generate the vertical part of the limiting contour {(I1, J) : I1 = 3 + 2w/μ,1 ≤ J ≤ (1 + 2w/3μ)3/2}.
The above considerations show that the constant W contours (or, equivalently, level set curves) for Wa and Wb have similar convergence properties in the limit while a different qualitative convergence ensues for the Wc model. It is therefore interesting that for finite the Wa and Wc models give the same slope behavior on J = 1 while the Wb model gives a different slope behavior. Namely, if one considers the slope of the constant W contours as they cross the ray J = 1 one finds from (3.5) that
For material model Wb it follows from (3.5) that
Hence, like the Wa and Wc contours, the Wb contour has the required stress-free slope value 1/2 at the reference configuration point (I1, J) = (3, 1). However, while the Wa and Wc contours maintain this value as I1 increases on J = 1, for the Wb contours the slope value decreases monotonically to zero as I1 increases on J = 1.
4. Uniaxial loading
Consider uniaxial loading in the e1 direction so that the Cauchy stress tensor is
By symmetry the stretches on the directions e2 and e3 are identical, i.e. λ2 = λ3, so that
and
4.1. Neo-Hookean response
For the neo-Hookean material (and incompressible materials in general) the requirement J = 1 gives
Comparing diagonal entries of T as given by (4.1) and (1.2) it follows from (4.2) and (4.4) that
and
Eliminating preac gives the well-known uniaxial neo-Hookean response
For both compressible and incompressible isotropic hyperelasticity the Poisson’s ratio ν and Youngs modulus E can be obtained via
where it is presumed that Tuni is expressed as a function of stretch λ1 alone. For the neo-Hookean material it therefore follows from these definitions in conjunction with (4.4) and (4.7) that ν = 1/2, the expected Poisson ratio for an incompressible material, and E = 3μ, the expected relation between Young and shear modulus for an incompressible material.
4.2. General compressible response
For the compressible models under consideration, comparison of the diagonal entries of T as given by (4.1) and (2.3) gives by virtue of (4.2) that
and
In general, these are regarded as two equations relating Tuni, λ1 and λ2.
One may easily verify the previous claim that the standard formulae for the elastic constants ν and E now hold. To this end, implicit differentiation of (4.10) with respect to λ1 gives
This is to be evaluated at F = I where it is observed from (4.3) that
Here use has been made of the Poisson ratio definition in (4.8). We introduce the shorthand notation
The evaluation of (4.11) at F = I yields
Solving this equation for ν gives
Simple manipulations using (2.7), (2.16) verifies the claim of Section 2.3 that
Turning to the determination of E, implicit differentiation of (4.9) with respect to λ1 gives
Evaluation at F = I with the aid of (4.12) yields
Hence according to (4.8), E is given by
where the last equality makes use of the definition of μ from (2.16). Eliminating ν between this result and (4.16) verifies the remaining Section 2.3 claim that E = 9κμ/(3κ + μ).
The above manipulations, which retrieve classical relations between the isotropic linear elastic constants for a W(I1, J) hyperelastic material, indicate that as becomes large the uniaxial stress-stretch relations (4.9) and (4.10) for each of the material models Wa, Wb and Wc will be consistent with the incompressible theory in the small strain limit, and hence consistent with neo-Hookean behavior for small strains. Of more interest is the extent to which the uniaxial behavior for the Wa, Wb and Wc models tend to neo-Hookean behavior for finite strains as becomes large.
To this end we shall determine the nature of the uniaxial load paths in the (I1, J)-plane for the different energy functions under consideration. As a preliminary result, suppose that λ2 is locally a function of λ1 in some portion of the uniaxial load curve. Then the slope dJ/dI1 of the associated path in the (I1, J)-plane is given by
At the undeformed configuration value (I1, J) = (3, 1) we have λ1 = λ2 = 1 and dλ2/dλ1 = −ν. Thus the above expression shows that each uniaxial load curve in the (I1, J)-plane has slope dJ/dI1 = 1/2 at (I1, J) = (3, 1). This is the same slope value as that of the boundary curve and as that of the level curve of energy W = 0 at (I1, J) = (3, 1). Consequently, all three curves: the boundary curve, energy contour W = 0, and uniaxial load curve, are mutually tangent to each other at (I1, J) = (3, 1).
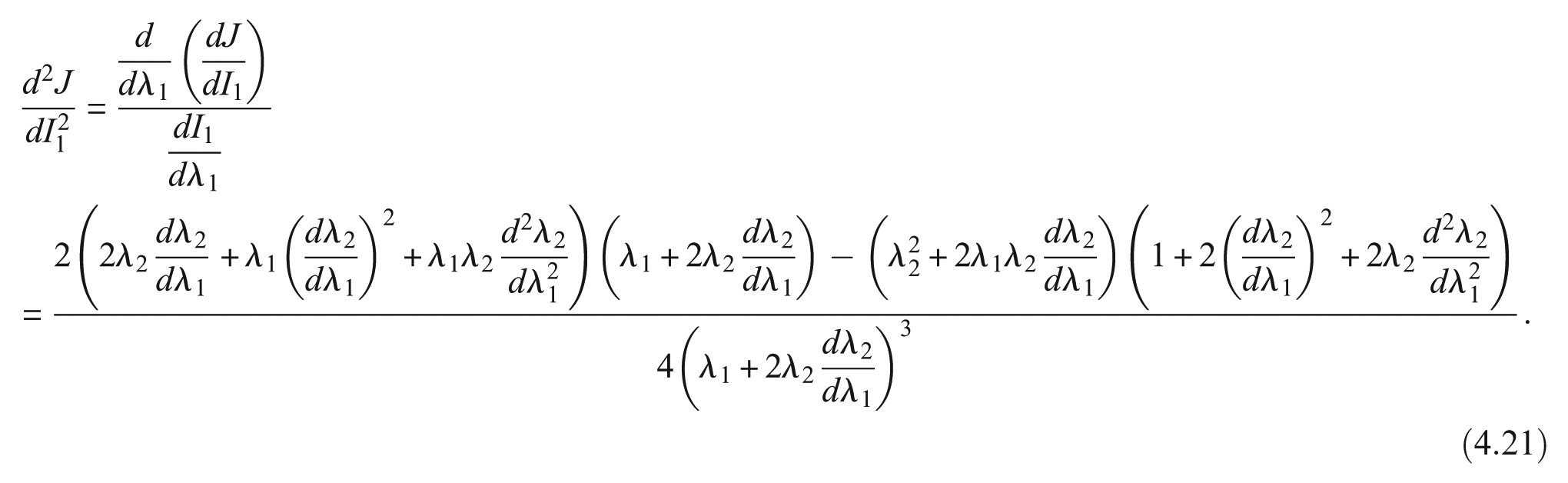
Now consider the second derivative of the uniaxial load curve in the (I1, J)-plane. Again presuming that λ2 is locally a function of λ1 one may calculate
At the undeformed configuration value (I1, J) = (3, 1) where λ1 = λ2 = 1 and dλ2/dλ1 = −ν the above result allows the second derivative to be written as
It is notable that , which will generally depend upon the choice of W, cancels out of the expression (4.21) when λ1 = λ2 = 1. Hence, at the undeformed point (I1, J) = (3, 1) is common for all models with the same κ/μ. Also at the undeformed point (I1, J) = (3, 1) tends to ∞ in the incompressible limit . This is consistent with the notion that all of these models should generate uniaxial load paths in the (I1, J)-plane that in some way collapse onto the incompressible locus J = 1 in the incompressible limit. We now turn our attention to the qualitative nature of this collapse for the various models Wa, Wb and Wc under consideration.
4.3. Model Wa
For Wa given by (2.11) the uniaxial load relations (4.9) and (4.10) specialize to
The second of these determines the relation between λ1 and λ2. If κ = 2μ/3, then (4.24) gives the trivial solution λ2 = 1 for all possible λ1 (because κ = 2μ/3 this corresponds to ν = 0). If κ>2μ/3, then (4.24) can be expressed both as a quadratic equation in and also as a quadratic equation in λ1. When expressed as a quadratic equation in it follows that both roots are real, however only one of these is positive for each λ1>0. This leads to a unique determination of a single positive λ2 for each positive λ1. This unique determination is formally given by
where again .
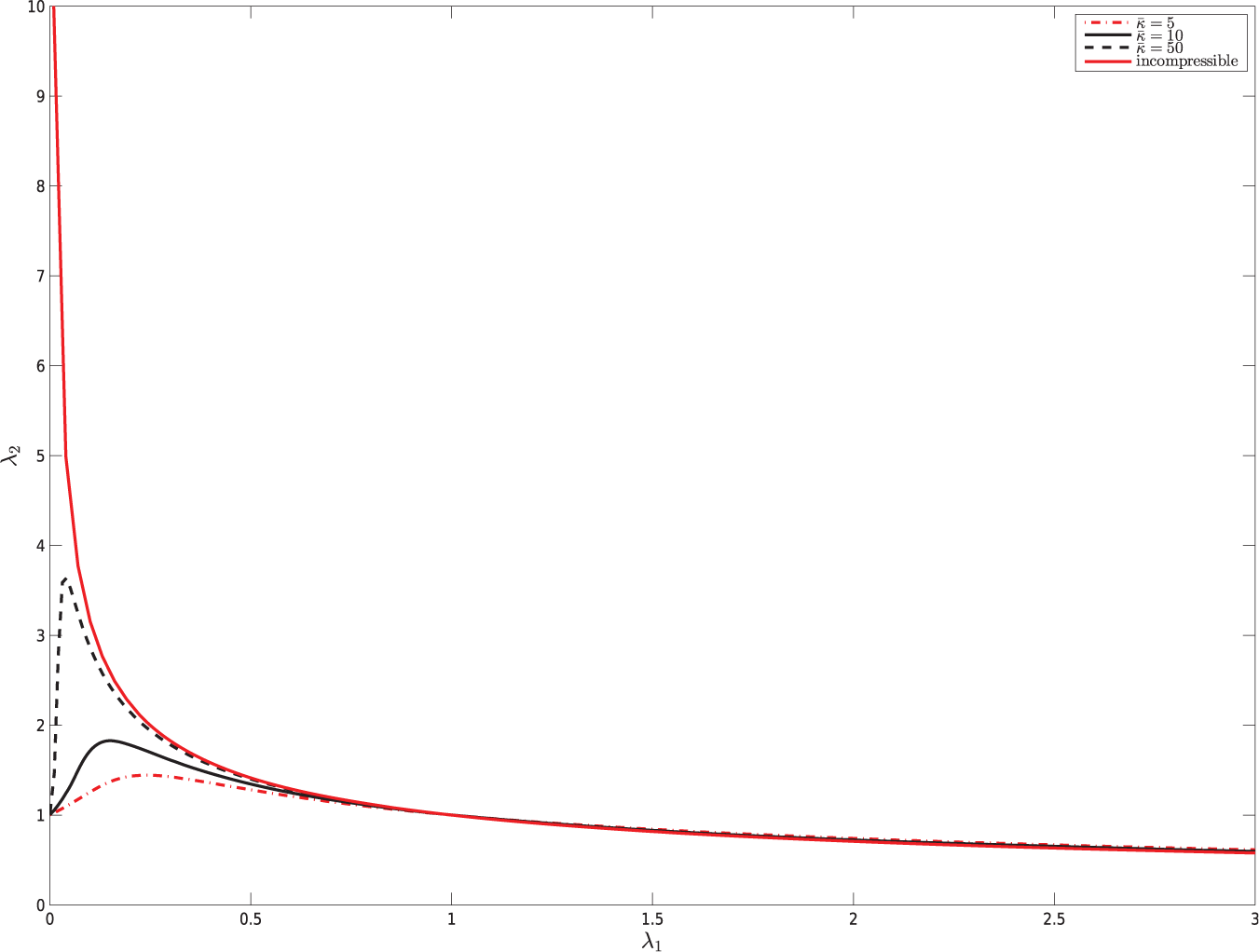
Consider the graph of λ2 as a function of λ1 for λ1>0. Direct analysis of (4.25) shows that λ2 as a function of λ1 always involves
The graph of λ2 as a function of λ1 first increases from (λ1, λ2) = (0, 1) to a local maxima at
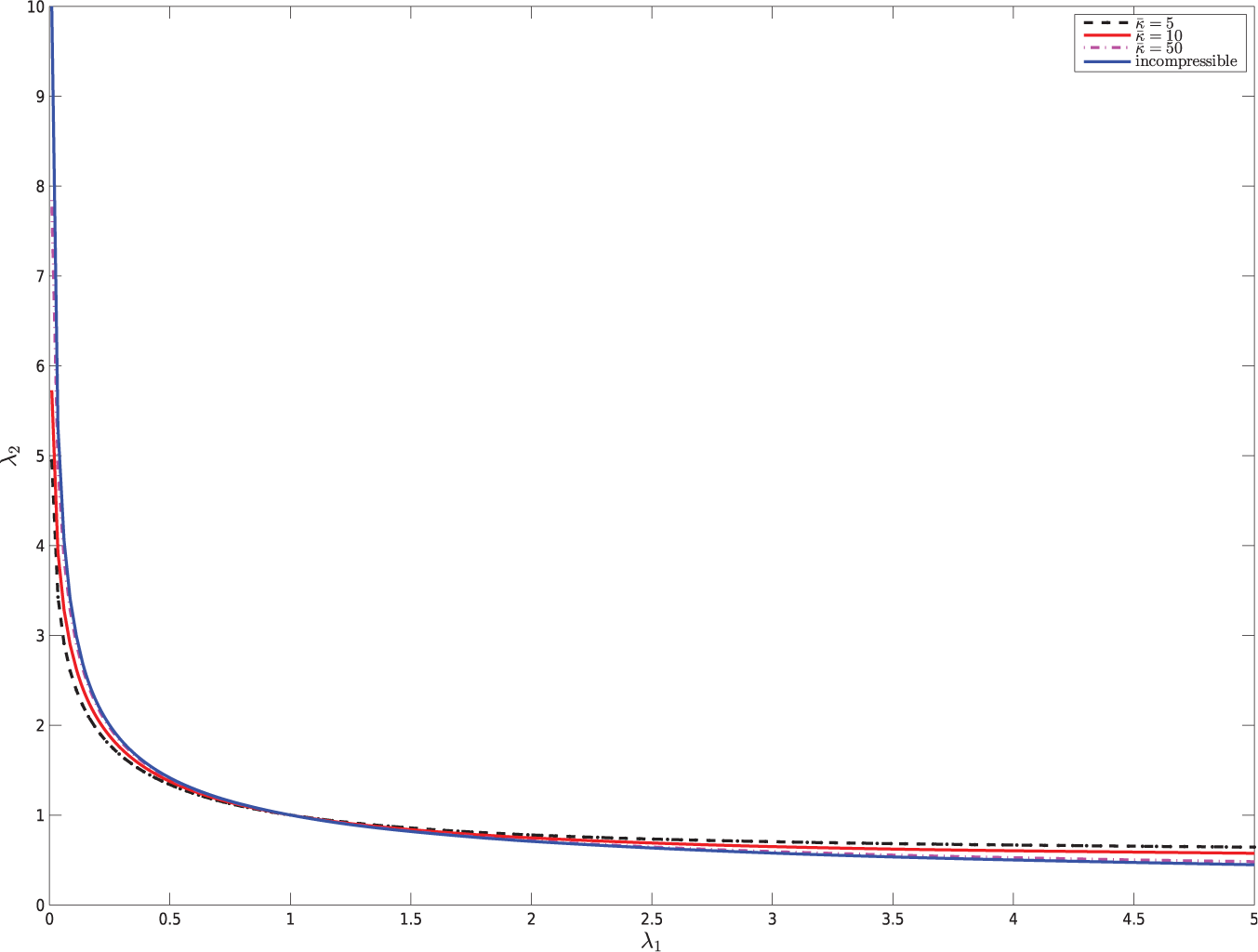
The graph then monotonically decreases, passing through the requisite undeformed location (λ1, λ2) = (1, 1) before asymptoting to zero as λ1→∞. Figure 6 shows plots of λ2 versus λ1 for various . The conspicuous feature is the anomalous behavior to the left of the global maximum where transverse and axial stretches decrease simultaneously. Note however that the value , which locates the local maximum, does proceed to zero as . Moreover, in this limit of it can be shown that the graph of λ2 as a function of λ1 approaches the incompressible result (pointwise, the convergence is nonuniform). At the undeformed location (λ1, λ2) = (1, 1) one verifies the requisite result and also obtains
Plot of λ2 versus λ1 for model Wa in uniaxial load with various = κ/μ. There is a local maximum at λ1 = 6/(10 + ) and we note that this value of λ1 tends to zero as becomes large. This causes the → ∞ limiting curve to converge onto the incompressible relation , which is the solid red curve.
Turning to the Cauchy stress, together (4.23) and (4.25) permit Tuni to be formally written as a function of λ1. One can verify that
Although the transverse stretch behavior was anomalous for , the stress Tuni exhibits conventional behavior in this regime. For example, one finds that
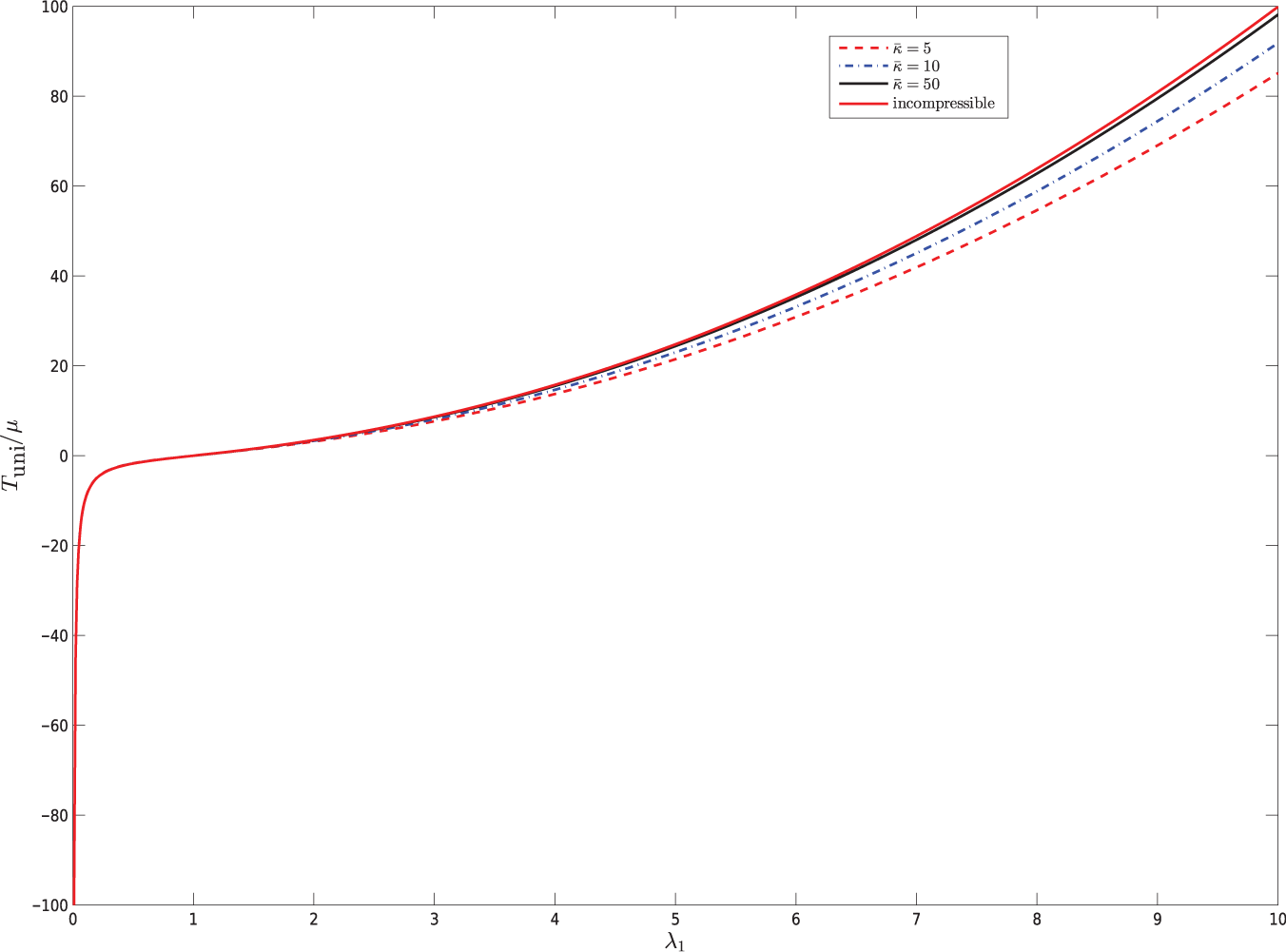
More generally, Tuni as a function of λ1 is found to be monotonically increasing (Figure 7). For any λ1 it can be shown that there exists a sufficiently large so as to make Tuni (λ1) as close as desired to the neo-Hookean value . Hence, the uniaxial stretch-stress response for the Wa model approaches that of the neo-Hookean material in the limit .
Plot of Tuni/m versus λ1 for model Wa with various . The uppermost curve is for the incompressible neo-Hookean material. For all cases, and .
The uniaxial load path in the (I1, J)-plane can be calculated parametrically using (4.3) and (4.25) with parameter λ1 varying from 0 to ∞. Specifically,
It follows from these expressions that
The general form of the uniaxial load path in the (I1, J)-plane is a curve with three distinguishable parts. The first part begins at (I1, J) = (2, 0) such that both I1 and J are then increasing to a local limit point value of I1. The second part continues from this limit point value of I1 and proceeds under increasing J to the undeformed point (I1, J) = (3, 1). Then the third and final part continues from the undeformed point with both I1 and J increasing. This third part asymptotes to
A sequence of such curves for various is shown in Figure 8. For general W these curves are tangent to the boundary at the undeformed point (I1, J) = (3, 1), i.e. dJ/dI1 = 1/2 at this point.
Uniaxial load paths in the (I1, J)-plane with model Wa for various = κ/μ. Each curve has three distinguishable parts. The first (lowest) part begins at (I1, J) = (2, 0) such that both I1 and J are each increasing to a local limit point value of I1. The second part continues from this limit point and proceeds under increasing J to the undeformed point (I1, J) = (3, 1). The value of I1 is generally decreasing on this part, but near the undeformed point the value of I1 is increasing for a very small portion of this curve. Then the third and final part continues from the undeformed point with both I1 and J increasing. This third part asymptotes to as I1→ ∞. The point in Figure 6 corresponding to the local maximum of the transverse stretch curve (red diamond) is very close to, but not at, the limit point.
Because
it follows that the third (upper) part of the uniaxial load curve in the (I1, J)-plane approaches the horizontal ray J = 1, I1 ≥ 3 in the incompressible limit. We therefore turn our attention to the lower two parts of the uniaxial load curve in the (I1, J)-plane.
Consider therefore the local limit point I1 that separates the first and second parts of the uniaxial curve in the (I1, J)-plane. By (4.3),
The last equality of (4.33) implies that the limit point that separates the first two parts of the uniaxial load curve in the (I1, J)-plane corresponds to a λ1 value that makes dλ2/dλ1 < 0.2 Such a limit point λ1 must therefore occur on the decreasing part of the transverse stretch curves (Figure 6). Thus, the λ1 value associated with the limit point in Figure 8 obeys 6μ/(10μ + 3κ) < λ1 < 1.
More importantly, as the limit point value of I1→∞ and this causes the lower and middle branches of the uniaxial load curve in the (I1, J)-plane to approach separate limits. The lower branch approaches the horizontal ray J = 0, I1 ≥ 2. The middle branch approaches the horizontal ray J = 1, I1 ≥ 3. To be more precise, given any location on either of these rays and a specified neighborhood of that location there exists a sufficiently large so as to cause all uniaxial load curves with larger to pass through the neighborhood under consideration. On the other hand, given a value of λ1 obeying 0 <λ1 < 1 and any value of ϵ>0 there exists a value of such that all larger values of cause the corresponding value of (I1, J) to be within an ϵ-neighborhood of the horizontal ray J = 1, I1 ≥ 3. In this sense the uniaxial load paths in the (I1, J)-plane converge onto the incompressible ray J = 1, I1 ≥ 3 in the limit .
4.4. Model Wb
For model Wb given by (2.12) the uniaxial load relations (4.9) and (4.10) specialize to
Equation (4.35) neither gives an explicit analytical expression for λ1 as a function of λ2 nor does it give an analytical expression for λ2 as a function of λ1. Consequently we proceed with an implicit analysis.
Reorganize (4.35) into
and consider the relation between λ1 and λ2 as . To this end fix λ1>0 and observe that is bounded. This follows because if λ2→∞, then division of (4.36) by and subsequent consideration of would lead to the contradiction 1 = 0. Now because both λ1 and λ2 are finite as it follows from (4.36) that in this limit . Furthermore, a dominant balance analysis of (4.36) under an assumption that with unknown constants χ and τ leads to
where h.o.t stands for higher-order terms. Consideration of the various balance possibilities leads to a conclusion that the three terms above the brackets in (4.37) provide the dominant balance with τ = 1. One then obtains that . Together this gives
This in turn gives that
at fixed λ1.
Having verified that gives volume preservation and hence the incompressible limit we remark that this by itself does not preclude the possibility of an anomalous transverse stretch behavior for finite κ such as that which occurs for the Wa model (Figure 6). Numerical analysis however shows that such anomalous behavior does not occur (Figure 9).
Plot of λ2 versus λ1 for model Wb in uniaxial load with various = κ/μ. The curve function is implicitly given by (4.35).
To establish such a result more definitively one may consider the separate limits of λ1→ 0 and λ1→∞ at finite . This is also useful for consideration of the uniaxial load curves in the (I1, J)-plane for this material model. Consider first the limit λ1→∞ in which case (4.36) gives
In particular, a λ1→∞ dominant balance analysis of (4.36) under an assumption that with unknown constants ζ>0 and η>0 leads to
Consideration of the various balance possibilities leads to a conclusion that the two terms above the brackets in (4.41) provide the dominant balance with η = 1/8. One then obtains that ζ = (4μ/3κ)3/16. Using this ζ and η, the next-order term in the expansion proceeds under the assumption that with unknown constants ω and ρ>1/8.
Thus, it is found that
at fixed .
The limit λ1→ 0 can be considered in a similar fashion wherein a dominant balance analysis yields
at fixed .
Turning next to the Cauchy stress component Tuni one obtains from (4.35) and (4.34) that
Use of the expansion (4.38) in this result yields
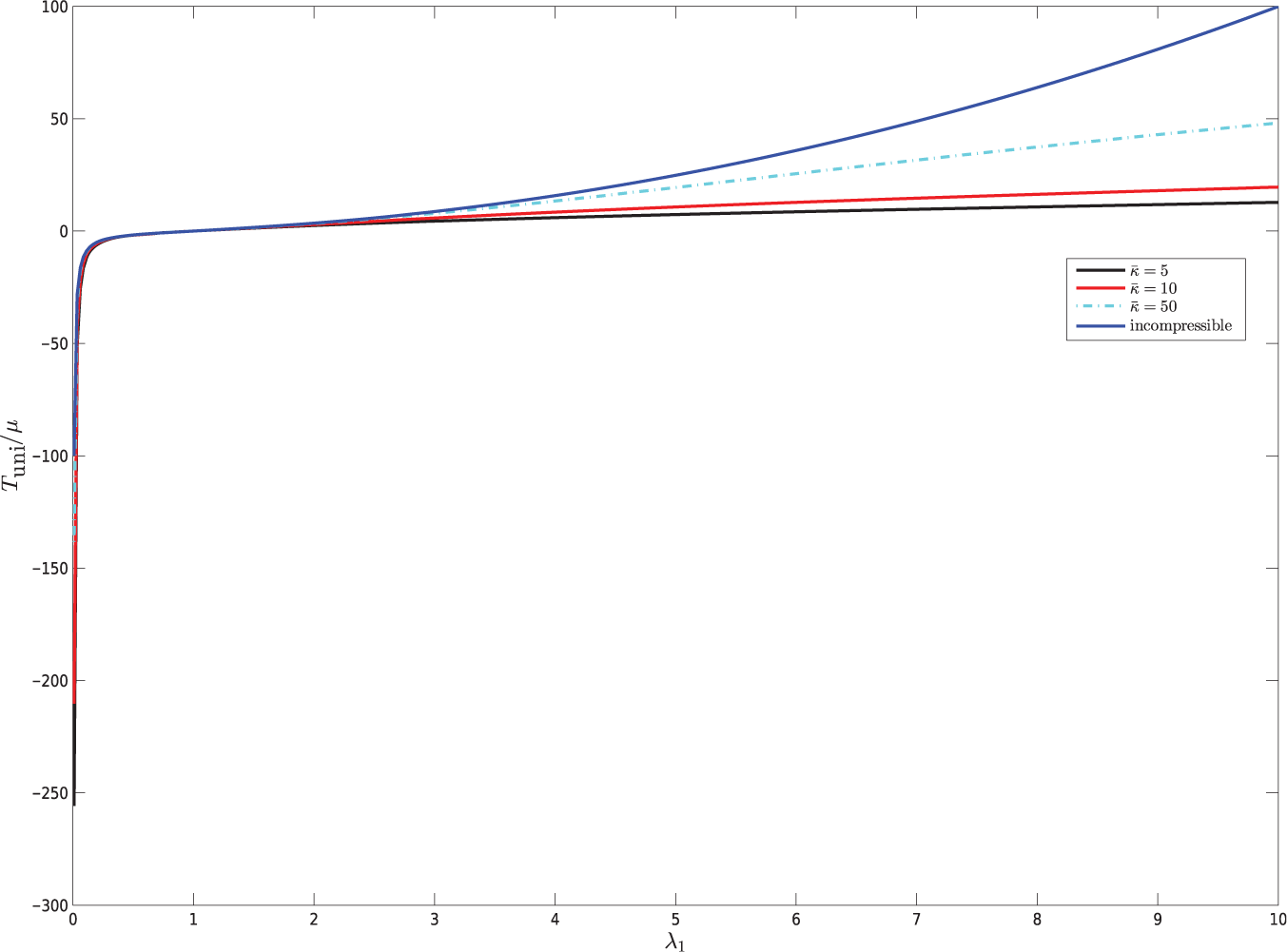
at fixed λ1. In particular, the neo-Hookean result is recovered in the limit . Figure 10 displays the dependence of Tuni upon λ1 for various . At fixed κ the asymptotic behavior of Tuni as λ1→∞ follows from (4.44) in conjunction with (4.42). Similarly, at fixed κ the asymptotic behavior of Tuni as λ1→ 0 follows from (4.44) in conjunction with (4.43). These give
Plot of Tuni/μ versus λ1 for model Wb with various . The uppermost curve is the incompressible neo-Hookean limit. For all cases, and .
In particular, this confirms that and .
Consider now the uniaxial load paths in (I1, J)-plane for this material. As is the case for the Wa model material, these paths for the Wb model material vary with . Figure 11 shows this variation. By virtue of (4.38) these curves collapse onto the horizontal ray J = 1, I1 ≥ 3 as . To be precise, given a value of λ1>0 and any value of ϵ>0 there exists a value of such that all larger values of cause the corresponding value of (I1,J) to be within an ϵ-neighborhood of the horizontal ray J = 1, I1 ≥ 3. This is the same sense in which the previously considered Wa curves collapse onto the incompressible ray. However, unlike the Wa material, the Wb does not exhibit the limit point behavior on the λ1 < 1 portion of the (I1, J) path. In particular, at fixed the λ1→ 0 limit of the (I1, J) uniaxial load path is not a finite point in the (I1,J)-plane as was the case for the Wa model. Rather, for the Wb material (4.43) gives
Uniaxial load paths in the (I1, J)-plane with model Wb for various . There is a single λ1 < 1 branch and on this branch J→ 0 as I1→ ∞. There is also a single λ1 < 1 branch and on this branch J→ ∞ as I1→ ∞. As → ∞, the contours all approach the incompressible ray J = 1, I1 ≥ 3.
In particular, at fixed there is a single λ1 < 1 branch to the uniaxial load curve in the (I1, J)-plane, and as λ1→ 0 this curve gives J→ 0 as I1→∞.
For λ1>1 the Wb material gives a uniaxial load curve in the (I1, J)-plane with a single branch. This is also the case for the Wa material. However, here it is to be recalled that the Wa material at fixed gives a finite J asymptote as λ1→∞. This is not the case for the Wb model. Specifically (4.42) gives
In particular, for the Wb material the upper branch of the uniaxial load curve gives J→∞ as I1→∞.
Thus, both the Wa and Wb material models give uniaxial load curves in the (I1, J)-plane that approach the requisite incompressible ray J = 1, I1 ≥ 3 as . However, the nature of the curves for finite has been shown to be qualitatively quite different.
4.5. Model Wc
For Wc given by (2.13) the uniaxial load relations (4.9) and (4.10) specialize to
The second of these gives the explicit relation
which is monotonically decreasing and gives λ2→ 0 as λ1→∞ and also λ2→∞ as λ1→ 0 (a plot is omitted, the form would be similar to that of the Wb model in Figure 9). By (4.49) and (4.51),
and the corresponding plot turns out to be very similar to that for the Wa model as previously displayed in Figure 7. Thus from (4.51) and (4.52), the incompressible neo-Hookean limits are immediate
The relation between I1 and J for the present case of uniaxial load is thus explicit for this material model
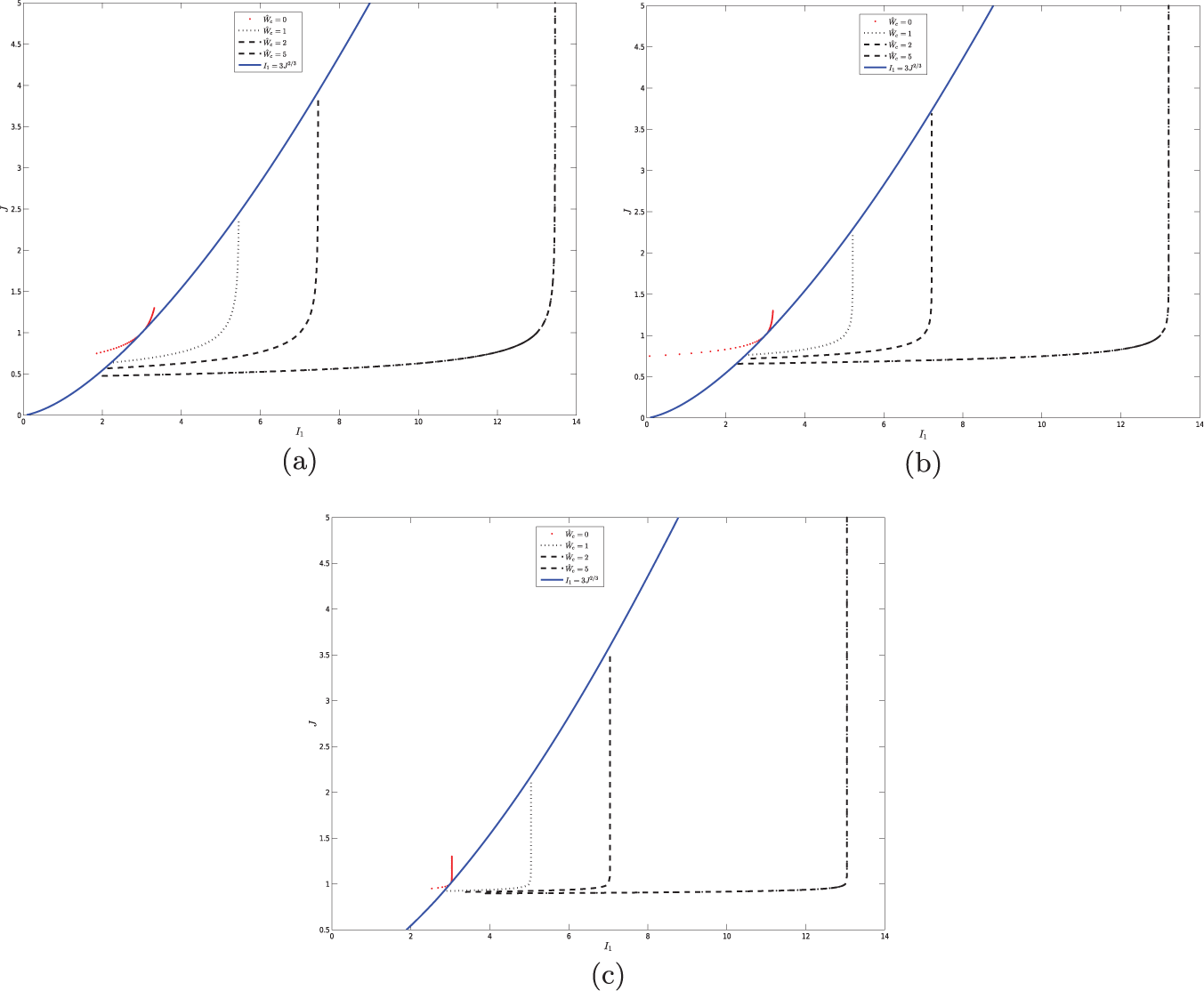
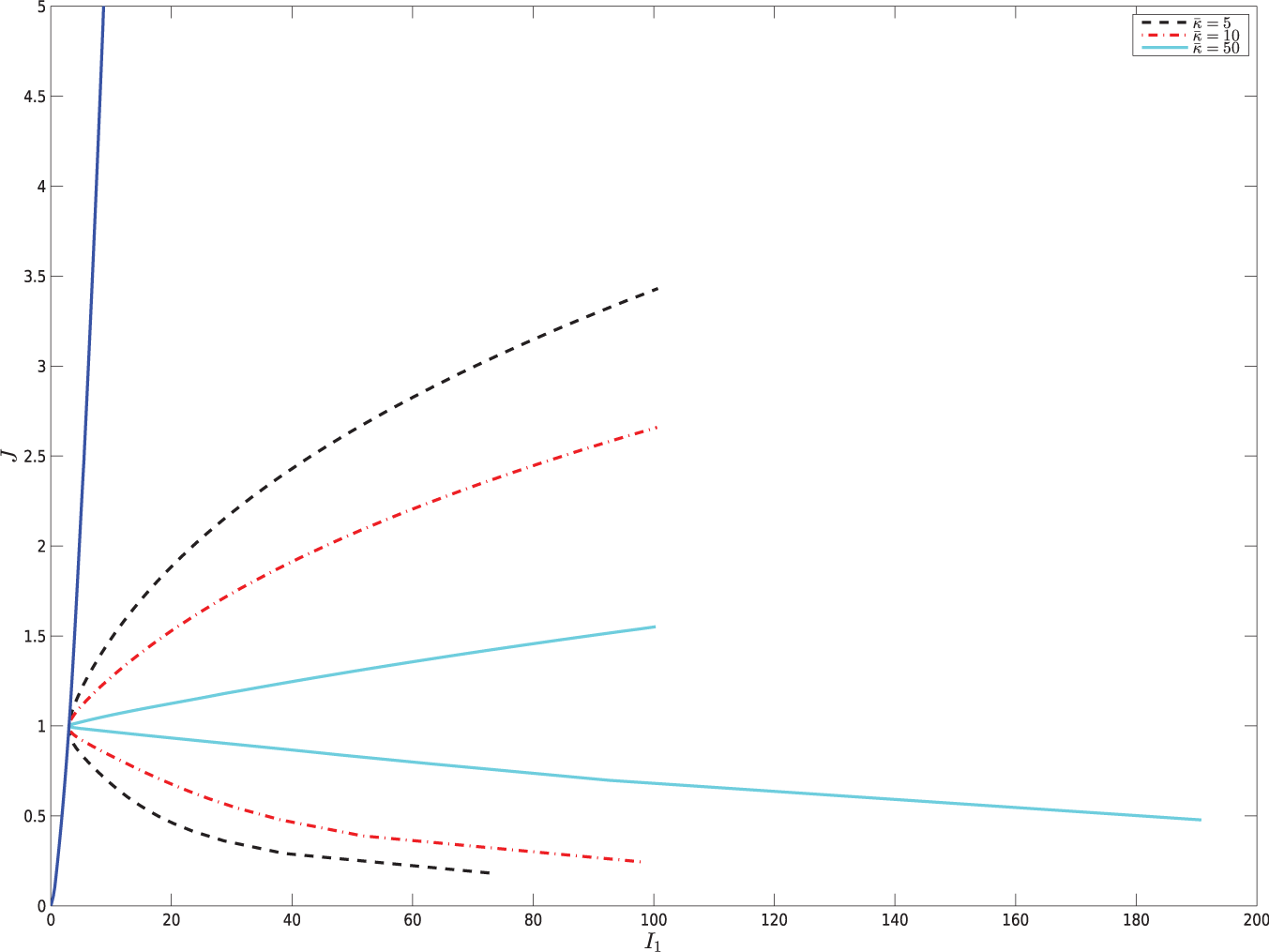
These contours are shown in Figure 12. As is the case for materials Wa and Wb these contours collapse onto the incompressible ray as . At fixed finite each uniaxial load contour in the (I1, J)-plane is qualitatively similar to those for the Wb material (but is qualitatively different from the three-branch result of the Wa material). Namely there is a single λ1 < 1 branch and on this branch λ1→ 0 gives I1→∞ and J→ 0. There is similarly a single λ1>1 branch and on this branch λ1 → ∞ gives I1→∞ and J → ∞.
Uniaxial load paths in the (I1, J)-plane with model Wc for various . There is a single λ1 < 1 branch and on this branch J→ 0 as I1→ ∞. There is also a single λ1 < 1 branch and on this branch J→ ∞ as I1 → ∞. As → ∞, the contours all approach the incompressible ray J = 1, I1 ≥ 3.
Near the location corresponding to λ1 = 1 the explicit nature of (4.54) permits an exact determination of the point on the λ1 < 1 branch where I1 is minimized. Namely
As required, in the limit as the corresponding location in the (I1, J)-plane converges onto (I1, J) = (3, 1) which is the origination point of the incompressible ray.
5. Summary and discussion
The three different compressible hyperelastic models Wa(I1,J), Wb(I1,J) and Wc(I1,J), which are respectively given by (2.11), (2.12) and (2.13), each provide a compressible version of the incompressible neo-Hookean material model. Each is endowed with a parameter κ such that the incompressible neo-Hookean behavior is obtained in an appropriate sense provided that κ≫μ. There are, however, certain qualitative differences in the nature of the approach to neo-Hookean behavior in the limit . This was immediately apparent in the consideration of the pure pressure response. The pressure-volume response graph of an incompressible material is formally given by a vertical line. Indeed all three models Wa, Wb and Wc generate such a vertical line for positive pressures as such that, prior to the limit, κ gives the slope of the graph at zero pressure. However, for negative (tensile) pressures it is only models Wa and Wb that continue to give the vertical line in the limit as . The differing limiting (tensile) pressure response behavior for the Wc model can in turn be connected to the qualitatively different form of the constant energy contours in the (I1, J)-plane. This can be seen by noting the similarity of the Wa and Wb contours (Figures 3 and 4) and their dissimilarity to the Wc contours (Figure 5).
While the Wc model gives anomalous behavior as regards pressure-volume response for tensile pressures, the Wa material model at finite κ (no matter how large) has an idiosyncratic transverse stretch behavior in uniaxial load. Namely, while the Cauchy stress–axial stretch response for the Wa model is properly monotonic for all values of axial stretch, there is always a regime of extreme axial stretch contraction in which the transverse stretch reverses direction from being elongational to being contractile. The Wa model still gives neo-Hookean behavior in the large κ limit, because the axial stretch interval that gives rise to this anomalous behavior becomes vanishingly small as κ→∞. Nevertheless, such an interval of anomalous behavior is always present for finite κ.
The above considerations might argue for the superiority of the Wb model. Here, however, it is to be pointed out that the Wb model delivers a different nonzero normal stress in simple shear than is exhibited by the Wa and Wc models. While it is arguable which nonzero normal stress is preferable (recall that all normal stresses cannot vanish in simple shear) the fact that Wa and Wc provide the same nonvanishing component, while the Wb model provides a different nonvanishing component is at least an interesting observation (consistency with the neo-Hookean result is here provided by the freedom to choose preac). It is also to be remarked that certain conventionally posed numerical procedures seem to be more sensitive to possible instabilities when using the Wb model because of the dependence on I1/J2/3.
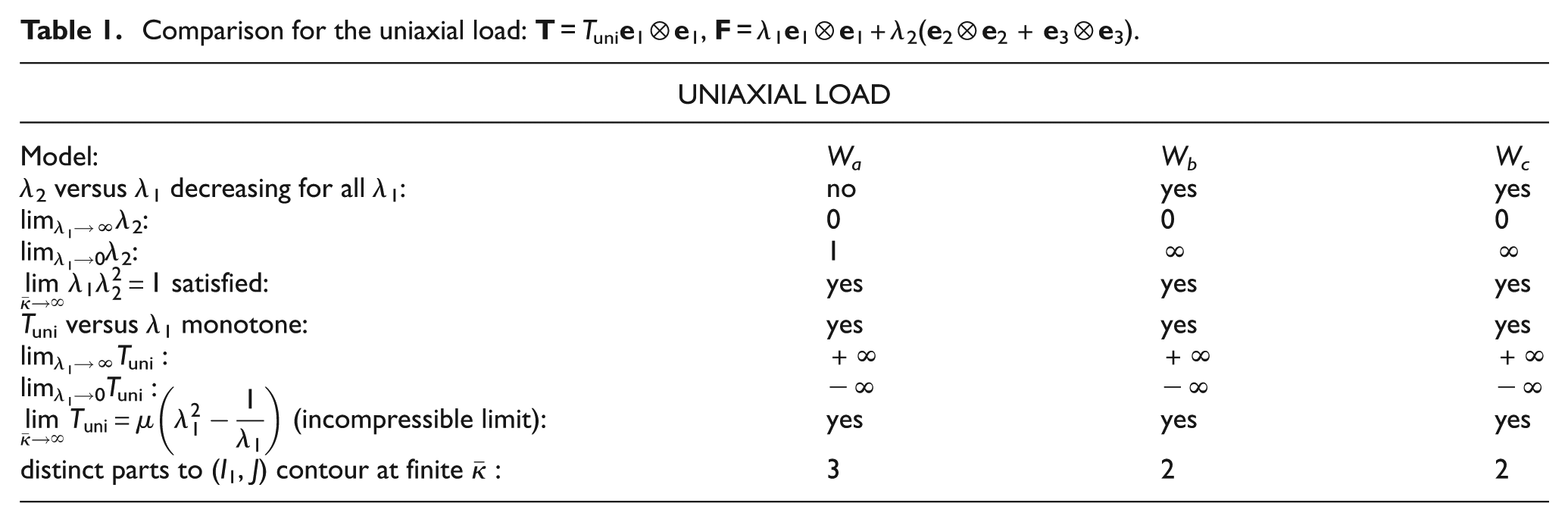
Table 1 summarizes the uniaxial loading response for the three model materials. Other states of load and deformation can be analyzed in a similar fashion. For example equibiaxial loading is characterized by F = λ1(e1⊗e1 + e2⊗e2) +λ3e3⊗e3 and T = Tbi (e1⊗e1 + e2⊗e2).
In this case (2.3) leads to
Comparison for the uniaxial load: T = Tunie1⊗e1, F = λ1e1⊗e1+λ2(e2⊗e2 + e3⊗e3).
UNIAXIAL LOAD
Model:
Wa
Wb
Wc
λ2 versus λ1 decreasing for all λ1:
no
yes
yes
limλ1→∞λ2:
0
0
0
limλ1→0λ2:
1
∞
∞
satisfied:
yes
yes
yes
Tuni versus λ1 monotone:
yes
yes
yes
limλ1→∞Tuni :
+∞
+∞
+∞
limλ1→0Tuni :
−∞
−∞
−∞
(incompressible limit):
yes
yes
yes
distinct parts to (I1, J) contour at finite :
3
2
2
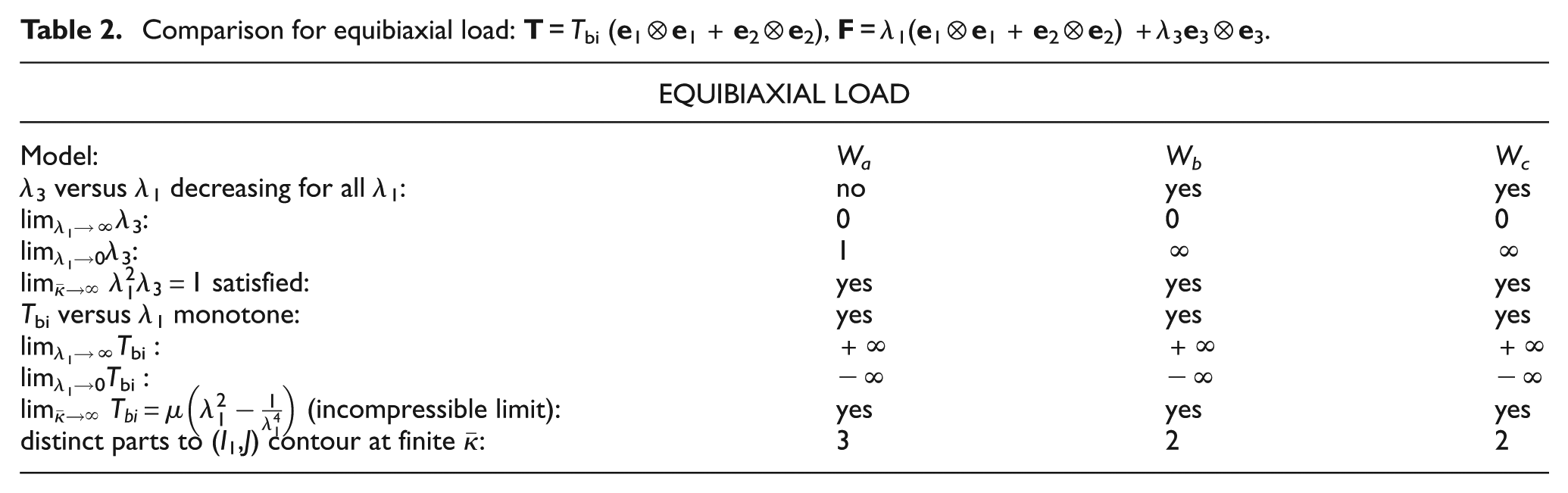
All three models give neo-Hookean behavior in an appropriate sense as although the qualitative nature of the convergence is again material sensitive. The main results are summarized in Table 2.
Comparison for equibiaxial load: T = Tbi (e1⊗e1 + e2⊗e2), F = λ1(e1⊗e1 + e2⊗e2) +λ3e3⊗e3.
EQUIBIAXIAL LOAD
Model:
Wa
Wb
Wc
λ3 versus λ1 decreasing for all λ1:
no
yes
yes
limλ1→∞λ3:
0
0
0
limλ1→0λ3:
1
∞
∞
satisfied:
yes
yes
yes
Tbi versus λ1 monotone:
yes
yes
yes
limλ1→∞Tbi :
+∞
+∞
+∞
limλ1→0Tbi :
−∞
−∞
−∞
(incompressible limit):
yes
yes
yes
distinct parts to (I1,J) contour at finite :
3
2
2
Finally, it is to be remarked that the nature of the observations presented here should not be viewed as seeking to settle some unresolved issue with respect to creating compressible model versions of a neo-Hookean material. Rather they are presented so as to provide an example of the type of considerations that would logically inform the evaluation of compressible versions of arbitrary incompressible hyperelastic materials, both isotropic (with a more involved incompressible W(I1, I2) replacing (1.1)) and anisotropic (e.g. a specific W(I1, I2, I4, I5) replacing (1.1) in the case of transverse isotropy). It can also be used in the modeling of more general physical phenomena when mechanical effects of finite deformation are significant.
Footnotes
Acknowledgements
The authors would like to thank a perceptive (and rapid) reviewer for most helpful comments.
Funding
This publication was made possible by the NPRP grant number 4-1138-1-178 from the Qatar National Research Fund (a member of the Qatar Foundation). The statements made herein are solely the responsibility of the authors.
Notes
References
1.
SussmanTBatheKJ. A finite element formulation for nonlinear incompressible elastic and inelastic analysis. Comput Struct1987; 26: 357–409.
2.
WeissJMakerBNGovindjeeS. Finite element implementation of incompressible, transversely isotropic hyperelasticity. Comput Methods Appl Mech Eng1996; 135: 107–128.
3.
LevinsonMBurgessI. A comparison of some simple constitutive relations for slightly compressible rubber-like materials. Int J Mech Sci1971; 13: 563–572.
4.
BoyceMCArrudaEM. Constitutive models of rubber elasticity: a review. Rubber Chem Technol2000; 73: 504–523.
5.
HorganCOMurphyJG. A generalization of Hencky’s strain-energy density to model the large deformations of slightly compressible solid rubbers. Mech Mater2009; 41: 943–950.
6.
RivlinRS. Large elastic deformations of isotropic materials, I: Fundamental concepts. Philos Trans R Soc Lond A1948; 240: 459–490.
7.
KuboR. Large elastic deformation of rubber. J Phys Soc Japan1948; 3: 312–317.
8.
TruesdellCNollW. The Nonlinear Field Theories of Mechanics (Handbuch der Physik, vol. III/3) Berlin: Springer-Verlag, 1965.
9.
RajagopalKRWinemanAS. A constitutive equation for nonlinear solids which undergo deformation induced microstructural changes. Int J Plast1992; 8: 385–395.
10.
QiuGYPenceTJ. Remarks on the behavior of simple directionally reinforced incompressible nonlinearly elastic solids. J Elast1997; 49: 1–30.
11.
Ben-AmarMGorielyA. Growth and instability in elastic tissues. J Mech Phys Solids2005; 53: 2284–2319.
12.
HaritonIDebottonGGasserTC. Stress-modulated collagen fiber remodeling in a human carotid bifurcation. J Theor Biol2007; 248: 460–470.
13.
BallJM. Discontinuous equilibrium solutions and cavitation in nonlinear elasticity. Philos Trans R Soc Lond A1982; 306: 557–611.
14.
TsaiHPenceTJKirkinisE. Swelling induced finite strain flexure in a rectangular block of an isotropic elastic material. J Elast2004; 75: 69–89.
15.
GuoZCanerFPengX. On constitutive modelling of porous neo-Hookean composites. J Mech Phys Solids2008; 56: 2338–2357.
16.
RajagopalKRSrinivasaARWinemanAS. On the shear and bending of a degrading polymer beam. Int J Plast2007; 23: 1618–1636.
17.
BaekSValentinAHumphreyJ. Biochemomechanics of cerebral vasospasm and its resolution: II. constitutive relations and model simulations. Ann Biomed Eng2007; 35: 1498–1509.
18.
DemirkoparanHPenceTJ. Swelling of an internally pressurized nonlinearly elastic tube with fiber reinforcing. Int J Solids Struct2007; 44: 4009–4029.
19.
PenceTJTsaiH. Swelling-induced cavitation of elastic spheres. Math Mech Solids2006; 11: 527–551.
20.
BaekSPenceTJ. On swelling induced degradation of fiber reinforced polymers. Int J Eng Sci2009; 47: 1100–1109.
21.
BaekSPenceTJ. On mechanically induced degradation of fiber-reinforced hyperelastic materials. Math Mech Solids2011; 16: 406–434.
22.
BonetJWoodR. Nonlinear Continuum Mechanics for Finite Element Analysis. Cambridge: Cambridge University Press, 1997.
23.
PucciESaccomandiG. On universal relations in continuum mechanics. Continuum Mech Thermodyn1997; 9: 61–72.
24.
HorganCOSaccomandiG. Simple torsion of isotropic, hyperelastic, incompressible materials with limiting chain extensibility. J Elast1999; 56: 159–170.
25.
WinemanA. Some results for generalized neo-Hookean elastic materials. Int J Non Linear Mech2005; 40: 271–279.
26.
CurriePK. The attainable region of strain-invariant space for elastic materials. Int J Non Linear Mech2004; 39: 833–842.
27.
CiarletPGGeymonatG. Sur les lois de comportement en élasticité non linéaire compressible. CR Acad Sci Paris Sér II1982; 295: 423–426.
28.
OgdenRW. Non-linear Elastic Deformations. New York: Dover, 1984.
29.
CiarletP. Mathematical Elasticity, vol. I. Amsterdam: Elsevier, 1988.
30.
HolzapfelGA. Nonlinear Solid Mechanics: a Continuum Approach for Engineering. Chichester: Wiley, 2000.
31.
ScottNH. The incremental bulk modulus, Young’s modulus and Poisson’s ratio in nonlinear isotropic elasticity: Physically reasonable response. Math Mech Solids2007; 12: 526–542.
32.
FloryP. Thermodynamic relations for high elastic materials. Trans Faraday Soc1961; 57: 829–938.
33.
OgdenR. Large deformation isotropic elasticity: on the correlation of theory and experiment for compressible rubberlike solids. Proc R Soc Lond Ser A, Math Phys Sci1972; 328: 567–583.
34.
EhlersWEipperG. The simple tension problem at large volumetric strains computed from finite hyperelastic material laws. Acta Mech1998; 130: 17–27.
35.
HorganCOMurphyJG. On the volumetric part of strain-energy functions used in the constitutive modeling of slightly compressible solid rubbers. Int J Solids Struct2009; 46: 3078–3085.
36.
PenceTJ. Distortion of anisotropic hyperelastic solids under pure pressure loading: compressibility, incompressibility and near incompressibility. J Elasticity2014; 2: 251–273.
37.
DollSSchweizerhofK. On the development of volumetric strain energy functions. J Appl Mech2000; 67: 17–21.
38.
HartmannSNeffP. Polyconvexity of generalized polynomial-type hyperelastic strain energy functions for near-incompressibility. Int J Solids Struct2003; 40: 2767–2791.
39.
BlatzPJ. On the thermostatic behavior of elastomers. In: Polymer Networks, Structure and Mechanical Properties. New York: Plenum Press, 1971.
40.
GorbYWaltonJW. Dependence of the frequency spectrum of small amplitude vibrations superimposed on finite deformations of a nonlinear, cylindrical elastic body on residual stress. Int J Eng Sci2010; 48: 1289–1312.
41.
GouKJoshiSWaltonJ. Recovery of material parameters of soft hyperelastic tissue by an inverse spectral technique. Int J Eng Sci2012; 56: 1–16.
42.
BlatzPKoW. Application of finite elastic theory to the deformation of rubbery materials. Trans Soc Rheol1962; 6: 223–251.
43.
BeattyMFStalnakerDO. The Poisson function of finite elasticity. J Appl Mech1986; 53: 807–813.