
Abstract
We concentrate on the dynamics of a thermoelastic Mindlin–Timoshenko beam striking a rigid obstacle. We state classical formulations involving complementarity conditions. Weak formulations are in the form of systems consisting of a hyperbolic variational inequality for a deflection, a hyperbolic and a parabolic equation for an angle of rotation and a thermal strain, respectively. The penalization method is applied to solve the unilateral problem. The time derivative of the function representing the deflection of the beam’s middle line is not continuous due to the hitting the obstacle. The acceleration term has the form of a vector measure.
1. Introduction and notation
Dynamic contact problems are not frequently solved in the framework of variational inequalities. For elastic problems there is only a very limited amount of results available (cf. the work by Eck et al. [1] and there cited literature). We have solved these problems for geometrically nonlinear plates and shells in the work by Bock and Jarušek [2, 3] respectively. In the work by Bock et. al. [4] we concentrated not only on purely mechanical impact to the plate being under some load and possibly contacting an rigid obstacle, but also have taken in mind the heat balance of this process. We consider here a thermoelastic Mindlin–Timoshenko beam in a dynamic contact with a rigid obstacle. We shall use a similar model in the work by Berti et al. [5]. The acceleration second time derivative term poses the greatest difficulties in solving dynamic contact problems. In contrast to the work by Berti et al. [5], where the boundary contact has been considered and the acceleration term does not appear explicitly, we express it here in the form of a vector measure in a similar way as in the work by Bock et al. [4], where the geometrically nonlinear plate model with a thermal effect has been investigated. We deal here with a one-dimensional beam model, because of a second order equation with respect to the deflection and the angle of the rotation. The second order two dimensional dynamic contact problem with the inner obstacle has still not been solved. The only known result for the case of a boundary contact has been received by Kim [6].
We study the mechanical behaviour of a beam of the length
The beam is acting under the perpendicular load

is the time-length domain.
The beam is assumed to be simply supported on both its ends. We denote by
2. Classical formulation and its penalization
For simplicity, the rigid obstacle of the form y=0 is considered. We denote by g the unknown contact force between the beam and the obstacle. The first and the second-time derivatives of any function w are denoted by
Using the complementary principle we arrive at the following initial-boundary value problem










Let

and equations (3) to (10).
3. Solving the penalized variational problem
Before coming to a variational formulation of the problem given by equations (11) and (3) to (10) we introduce some spaces of functions and state the assumptions on data.
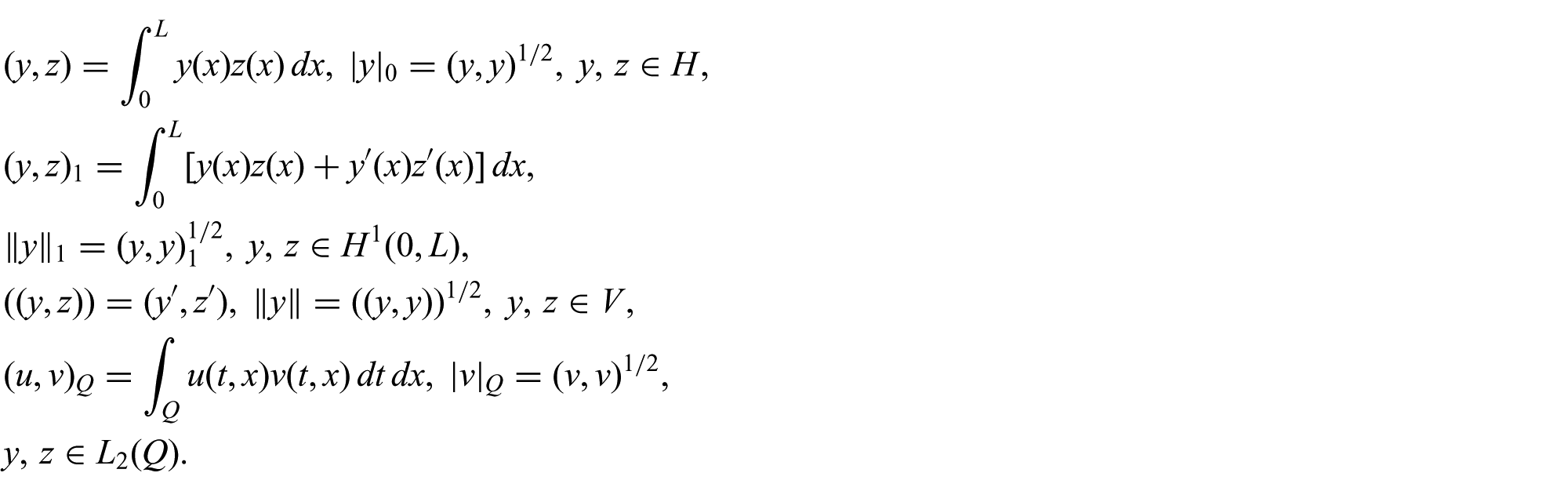
Hilbert spaces
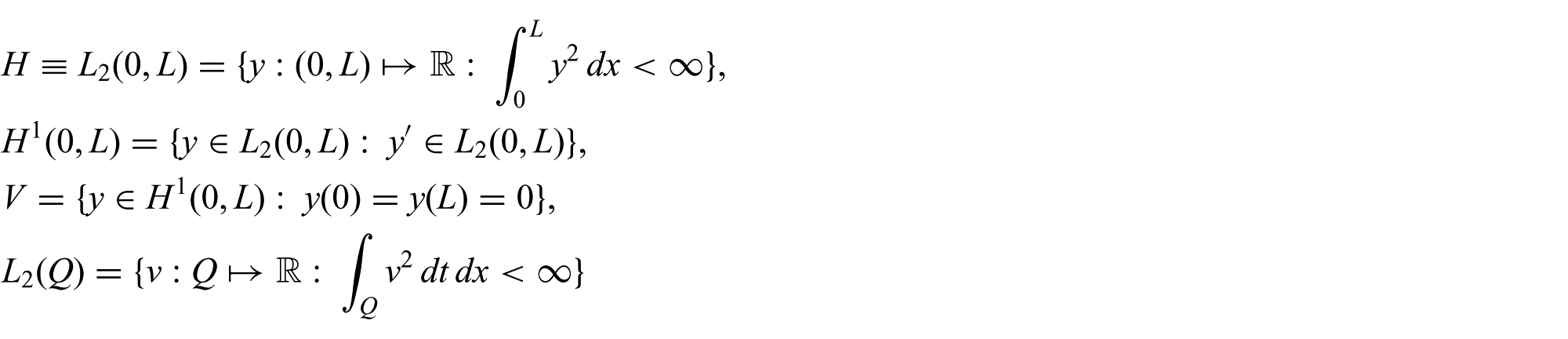
with the inner products and the norms
Vector-valued function spaces for a Banach space X,


We assume the right-hand sides

the initial data

and the Dirichlet boundary function

Let
We state a following variational formulation of the Penalized problem given by equations (11) and (3) to (10):

such that




hold for any
We shall verify the existence of a solution to the variational penalized problem.
Proof. We introduce

a basis of V orthonormal in

a basis of

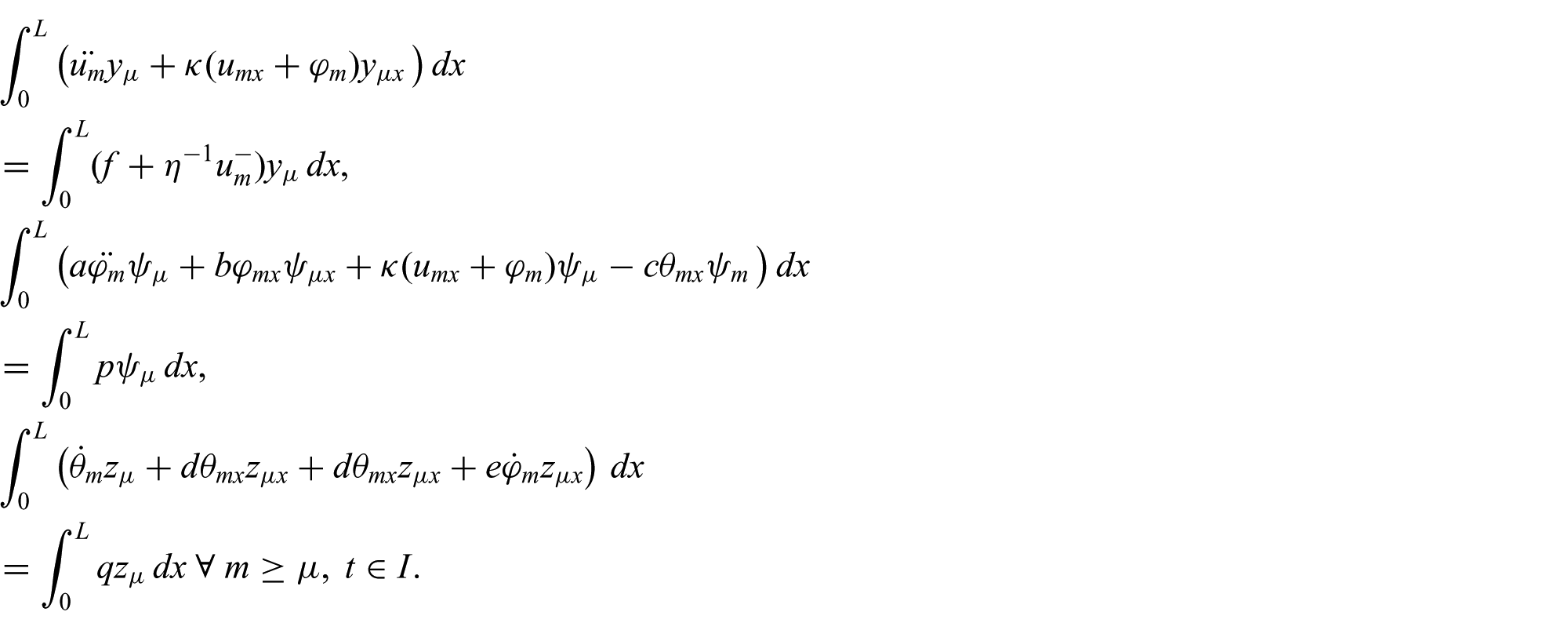
and construct a Galerkin approximation of a solution
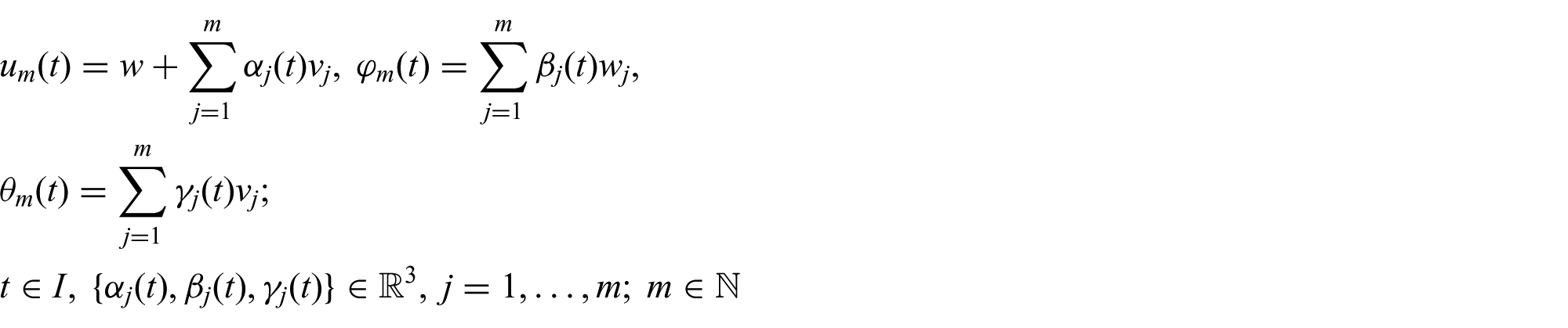
to satisfy the following system of equations



and the initial conditions

There exists a local solution
We multiply equation (18) by
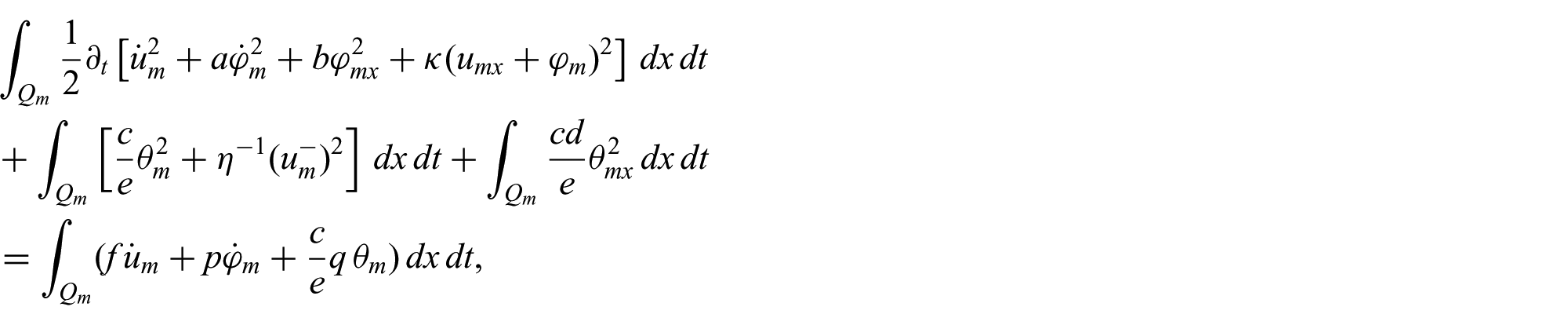
leading to the estimate

The prolongation to the whole interval I is due to the fact that the original estimate for


where


We continue with solving the penalized problem.
Let

Then
The convergences given by equations (25) and (26) imply
Functions
4. Solving the original problem
The estimates given by equations (22) and (24) imply the

for a solution

and obtain

After inserting

In order to get the subsequences in L1 spaces due to the estimates given by equation (28) we apply the fact that they are the subsets of the dual spaces over C0 spaces expressed in a form of measures. We set

The reader can consult the work by Bock et al.[4] (Appendix B) for details on vector valued measures (see also the work by Diestel and Uhl [7] or Dinculeanu [8]).
Let

We have for a subsequence of

where g is a unique nonnegative measure expressing the contact force.
Before stating a variational formulation of the original problem given by equations (1) to (10) we introduce some sets and spaces of vector valued functions

We are looking for a solution u in the shifted cone

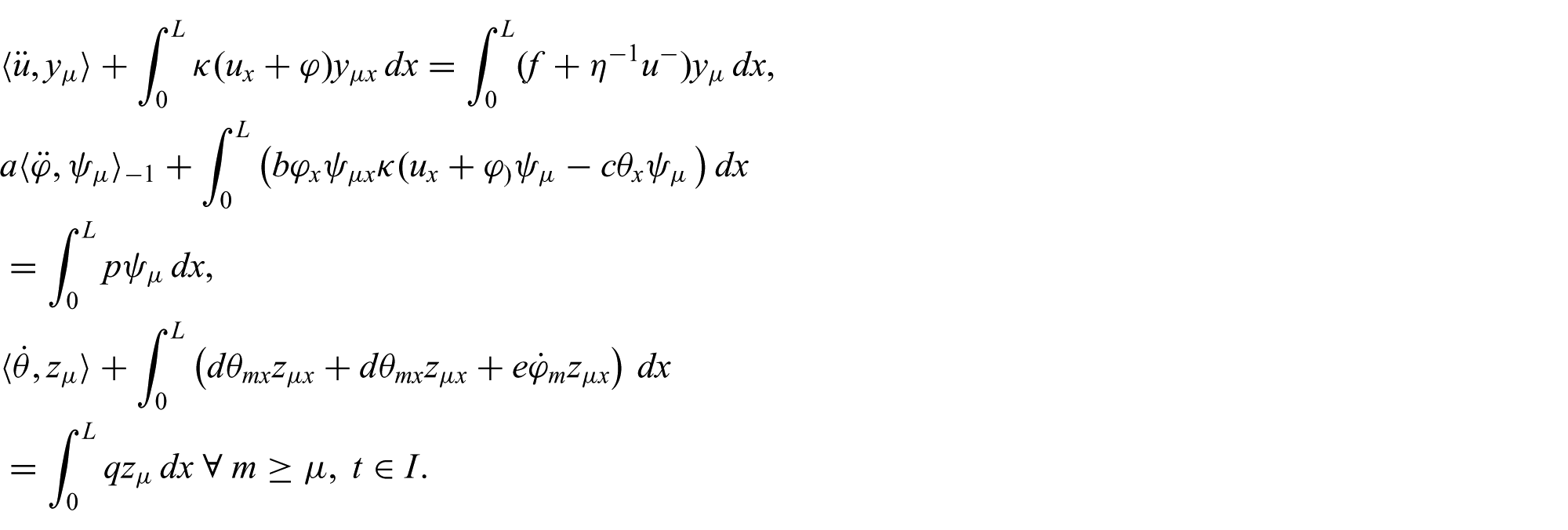
We state the following variational formulation of the dynamic contact problem given by equations (1) to (10).

such that

the inequality and equations



hold for any
Using the penalized Problem

The previous representation given by equation (30) enables us to express directly the initial conditions.
5. Conclusion
We have formulated in a classical and a weak (variational) form the dynamic problem for a thermoelastic Mindlin-Timoshenko beam in a contact with a rigid obstacle. With respect to noncontinuity of velocities is the second-time derivative of the deflection function for the acceleration expressed as a vector measure in variational form of the problem. We verified the existence of a weak solution. It is a challenge to solve the same problem for a Mindlin–Timoshenko plate due to the lack of suitable imbedding formulas.
Footnotes
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Ministry of Education of Slovak Republic under Grant of Science and Technology Assistance Agency (grant number APVV-0246-12 and VEGA 1/0819/17).