
Abstract
This paper presents mathematical formulations and a solution for contact problems that concern the nonlinear beam published by Gao (Nonlinear elastic beam theory with application in contact problems and variational approaches, Mech Res Commun 1996; 23: 11–17) and an elastic foundation. The beam is subjected to a vertical and also axial loading. The elastic deformable foundation is considered at a distance under the beam. The contact is modeled as static, frictionless and using the normal compliance contact condition. In comparison with the usual contact problem formulations, which are based on variational inequalities, we are able to derive for our problem a nonlinear variational equation. Solution of this problem is realized by means of the so-called control variational method. The main idea of this method is to transform the given contact problem to an optimal control problem, which can provide the requested solution. Finally, some results including numerical examples are offered to illustrate the usefulness of the presented solution method.
Keywords
1. Introduction
Contact problems are generally very important in practice. However they are quite difficult and the difficulties arise mainly from the fact that the contact domain is unknown a priori and should be determined during a solution process.
This study is going to deal with the nonlinear beam model developed by Gao and an elastic foundation, which are in possible contact. It is well known that the contact of elastic bodies may be modeled using the Signorini conditions, when the obstacle is rigid, and that leads to formulations with variational inequalities [1]. If the contact is modeled with a normal compliance condition, we can obtain the mathematical description for problems with deformable obstacle, and this description has a form of nonlinear equation. In Gao et al. [2] the Gao beam resting on a deformable foundation was studied. More about normal compliance conditions can be found for instance in Shillor et al. [3] or Sofonea and Matei [1].
Solving such equations, one may find the so-called control variational method to be very useful. The method was introduced in Arnautu et al. [4] and Sprekels and Tiba [5] as a new interesting method for analyzing and solving differential equations. It is remarkable both from the theoretical and the numerical points of view. Later it was used in the study of various problems [6, 7], but from our point of view, two papers, Sofonea and Tiba [8] and Barboteu et al. [9] are important, as they describe the contact of a cantilever Euler–Bernoulli beam with an obstacle. More applications concerning the control variational method are given in the monograph by Neittaanmäki et al. [10].
Using this method. the functional of total potential energy is transformed in such a way that it is possible to formulate an optimal control problem governed by the Euler–Bernoulli beam equation. The nonlinear terms from the variational equation are fully included in the control variable. Afterwards one can solve the resulting optimal control problem to obtain a solution of the original contact problem.
The aim of this paper is to generalize this idea for nonlinear beam and arbitrary boundary conditions. We are also going to extend considerably the results of our previous article [11] but only the convex case will be considered here.
It should be noted that a convex potential energy means that the static system has a unique solution, whereas a nonconvex potential energy leads to buckling phenomena, when the system has three solutions. In contrast, it is remarkable that the dynamic problems with the normal compliance condition always have a unique solution. Several interesting studies of such problems have already been published. Dynamic contact of the Gao beam with a reactive or rigid foundation is analyzed and computed in Andrews et al. [12, 13], the problem of two coupled Gao beams connected via a joint with a gap is described in Ahn et al. [14].
2. Nonlinear beam model by Gao
The most-used beam model is still the linear model by Euler and Bernoulli, which was established in about 1750. Nowadays its bending problem can be solved quite easily using the Finite Element Method (FEM) see Reddy [15], but in fact it does not allow greater deflections than very small ones compared to its length. There exist numerous nonlinear beam models. We think that one of the most interesting is the mathematical model proposed in 1996 by D. Y. Gao [16], which respects the original Euler–Bernoulli hypothesis, i.e. straight lines normal to the mid-surface remain straight and normal to the mid-surface after deformation, and at the same time enables moderately large deflections. Its advantage consists of its relative simplicity and good possibilities for a post-buckling analysis.
The governing equation for the Gao beam reads as follows

where we denote

E is the elastic modulus of the material, I is the area moment of inertia of the beam’s cross-section, w is the transverse displacement of the beam,
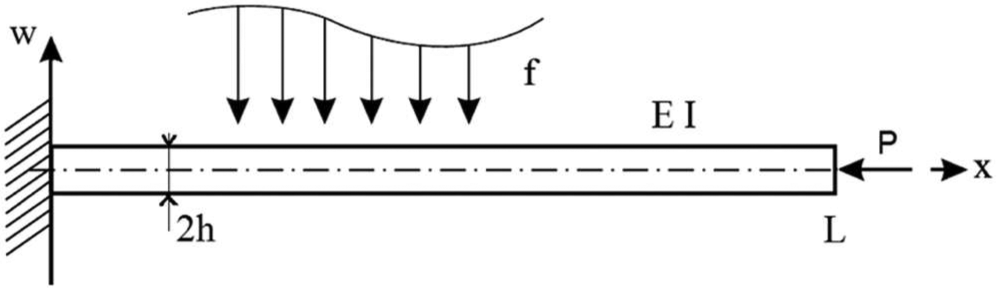
Nonlinear beam by Gao.
Naturally, there exists the functional of the potential energy for this beam model. First let us specify the function spaces that will be used in connection with this functional.
Throughout this paper we will consider four fundamental boundary value problems with corresponding function spaces
Next V will be any of the above-mentioned spaces


together with the following notations

Using this notation we define



Then the functional of the potential energy for the Gao beam can be expressed as follows

It is easy to verify, that every stationary point w of

where

In the case where w is a sufficiently smooth function, it satisfies also equation (1), which can under this assumption be easily derived from equation (11).
Finally, we associate with the functional (9) the following variational problem

Then we need to establish conditions of existence and uniqueness for the solution of equation (12) together with its relation to equation (11).
It is evident that generally the functional

From this definition we have

Thereafter it can be proved that

However the integral in equation (15) is always nonnegative and from equation (14) we obtain under assumption
Moreover,

Using the Friedrichs’ inequality for

The constants

Now taking into consideration, that
As
Let us recall that in this paper only the convex case will be considered.
3. Contact problems with a deformable foundation
Previous considerations will be now extended to contact problems, where the beam is situated above a foundation. The gap between them is described by the function
After that, the beam equation (1) is modified in the following way

where

represents contact forces between the beam and the foundation (Figure 2),
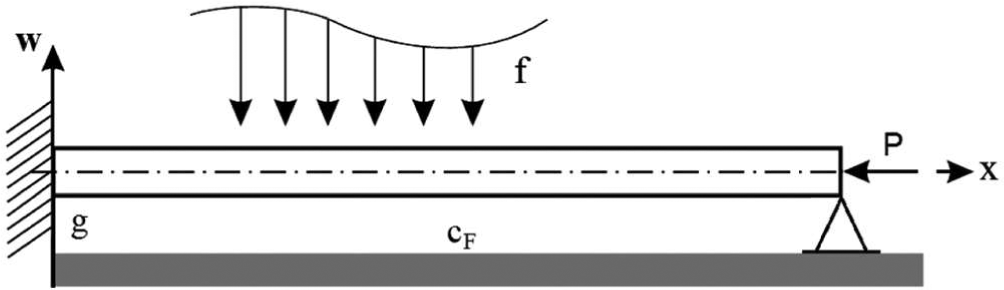
Beam and foundation.
Next we will establish a variational formulation of the considered contact problem. First let us introduce the energy of reaction forces resulting from beam–foundation interaction by

together with a nonlinear form

The total energy is then given by the sum of equations (9) and (21):

Using the same arguments as above we can prove for
Let us define the following minimization problem

From the convexity and coercivity of
Equation (24) has exactly one solution for arbitrary
This solution is also the unique solution of the following nonlinear equation

which characterizes the stationary point of
4. Solution using the control variational method
The main idea of the control variational method is to perform a minimization of the energy functional via an optimal control problem. Hence the optimal control theory plays an essential role in this approach. It is briefly described in the Appendix.
Changing the original problem to another one can be regarded as a transformation of variational principles, see Kravchuk and Neittaanmäki [18]. Many mathematical problems are solved using transformations. The idea is to transform the problem into another one we know how to solve. Of course, we have to prove that by means of solving the transformed problem we obtain a solution of the original one.
4.1. Transformation T1
In this section we will deal with transformation of variational problems which is sometimes called Friedrichs’ transformation, see Kravchuk and Neittaanmäki [18], chapter 5. Such an approach involves, for example, declaring the function v and its derivative
Following this idea, let us define in equation (23) a new variable:
This way we transform the functional (23) from equation (24) into a Lagrangian

where V is an appropriate Sobolev space, Z denotes space containing derivatives of functions from V and

Equations for the saddle point



For any possible boundary conditions we have

This implies condition

what is trivially satisfied for boundary problems
Next let us define a new variable u by means of the following equation

Equations (in classical form) for a stationary point are then as follows




Furthermore, from equations (28) and (33) we can get

Let

Obviously, such a solution exists and is unique. Then we can rewrite the functional (6) with regard to equations (38) and (39) as follows

Now it is possible to transform the functional (23). Using equation (40) we get

The last term in equation (41) is evidently constant and therefore it may be omitted during minimization. This way we finally obtain the transformed form of the functional

where the function
4.2. Contact problem solution by means of transformation T1
As a result of the previous paragraph considerations we obtained by means of equations (38) and (41) the following optimal control problem

The set of admissible controls is defined by

where
First we need to know conditions concerning the existence of a solution for our problem (43).
Proof: The state equation is here nothing but the classical Euler–Bernoulli equation, hence the existence and uniqueness of its solution is guaranteed. We express from equation (38) the unknown u by

and substitute it into equation (42). Using equation (39) we get

This is, up to the last term, which is constant, the functional

The optimal pair
Next we need to explain the relationship between the contact problem (24) and the optimal control problem (43).
Proof: Here we will follow the idea of the proof from Sofonea and Tiba [8], where an analogous theorem was proved.
The existence of an optimal pair
Let now consider a feasible pair of the form

for any

Because

we get by comparing equations (49) and (50) that the pair

Substituting from equation (50) we obtain

Optimality of the pair

hence

Substitution from equation (48) leads after some rearrangement to

Transposing all terms to the right-hand side, dividing this inequality by

for arbitrary pair
Finally let us determine the optimality conditions for the problem (43). Using the general results from the Appendix we get for an optimal pair



Here
The previous solution procedure, which is based on using the transformation T1, is in some sense generic as it can be applied to every boundary problem
An interesting idea leading to a different optimal control problem with the state equation of the second order was proposed in papers by Sofonea and Tiba [8] and Barboteu et al. [9], but only the cantilever beam for the Euler–Bernoulli model was considered there.
In the next section we will follow in a certain way the previous idea. For this purpose we introduce another transformation, as we need a more general approach than in the above-mentioned papers.
4.3. Transformation T2
This transformation is based on the definitions of two new variables and the concept of transformed loading

Of course, the function of transformed loading g still needs to be determined. To this end let us consider function

where V is the given space of test functions. If we can suppose that g lies in the space

Using the Green formula we obtain from here that

where we took into account that for every boundary problem, it holds that
The transformation (60) converts the functional (23) through the use of transformed loading (61) to Lagrangian

and the problem of finding its saddle point. Here we use the same notation as before, in addition Y is a space containing second derivatives of functions from V.
The system of equations representing such a saddle point is as follows





Next we introduce the variable u by

Under the following two assumptions


we eliminate the unknown y by substituting




Now defining a new bilinear form by

we get using equation (75) the equation

Similar to the previous transformation T1 we modify the functional (6) by means of equations (61), (67) and (70)

Using equation (79) we are able to finish the conversion of equation (23). We have

The last term in equation (80) is constant, hence it can be omitted by the minimization. Consequently the resulting form is as follows

4.4. Solution by means of transformation T2
Now we are ready to realize the original idea of solution from Sofonea and Tiba [8] and Barboteu et al. [9] with a generalization to the Gao beam. But we must be careful, because of satisfying the boundary conditions. Reduction of the state problem to the second-order equation does not enable us to determine arbitrary essential boundary conditions. No more than one in every end-point can be now prescribed.
This is very important from the computational point of view. We are going to use linear finite elements for the reduced state equation, but
we can prescribe only one boundary condition at each end-point and this condition cannot be of the second or the third order,
we are not able to realize accurately essential conditions of the type
Therefore the only meaningful possibility is the boundary problem (P4), where conditions
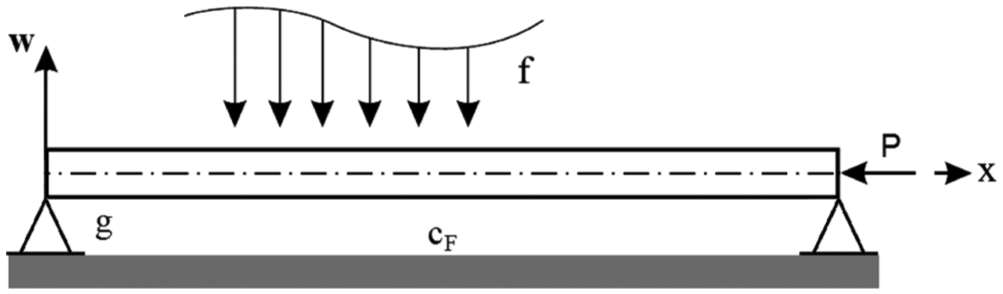
Simply supported beam with foundation.
Under the assumption, that we have guaranteed the existence of function g such that equation (61) or (62) hold, we can choose
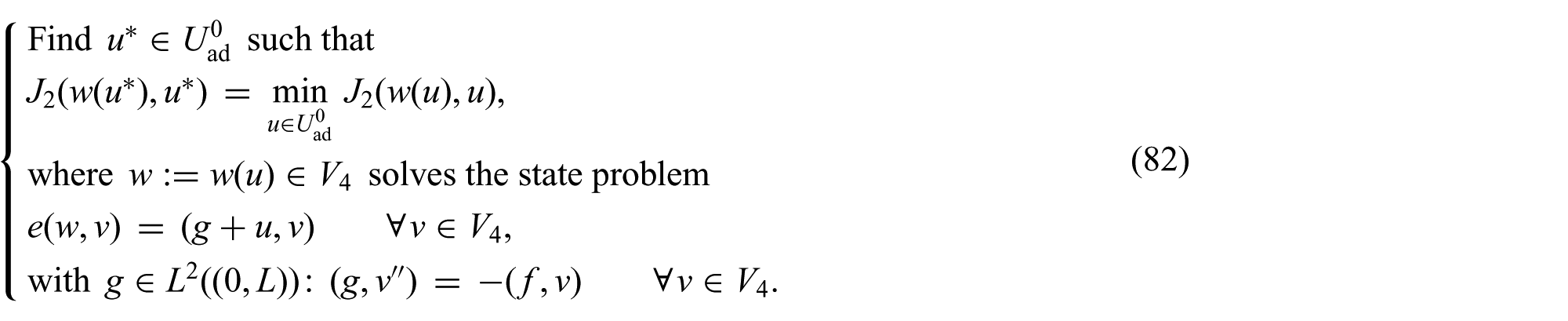
Similarly to section 4.2, we want to establish when the problem (82) has a solution and its relationship to the contact problem (24) or (25) with
Proof: is similar to the one of Theorem 1.

and let
Proof: The ideas involved in the proof of this theorem are quite similar to those involved in the proof of Theorem 2, and, for this reason, it is left.
In conclusion, we will specify optimality conditions regarding the problem (82). Using general results from the Appendix it can be claimed that the pair



Function
5. Numerical realization and examples
Both the optimal control problems (43) and (82) suggest that a general form of the computational procedure will consist of two parts:
evaluation of the given state problem,
simultaneous minimization of the corresponding functional.
The first item does not make much trouble. The state equation in equation (43) is the Euler–Bernoulli beam equation and its finite element solution is well known and can be found in many books, such as Reddy [15]. As was presented in Machalová and Netuka [11], the matrix form of the state equation can be expressed as

where
Next, given a control value
Descent direction means an element
The descent directions were chosen as anti-gradients of
Step lengths were determined by using standard algorithms, as described in Nocedal and Wright [20].
For illustrative purposes, several simple examples are given here. The common data for the beams are:
In addition to the Gao beam we will also present results for the classical Euler–Bernoulli beam for comparison. As the nonlinear beam model is in all cases here tougher than the classical one, the upper curves in the following figures show the results for the Gao beam and the lower curves are the results for the Euler–Bernoulli beam.
In the first example pure bending problems are demonstrated for the cantilever beam (see Figure 1) with constant vertical loading
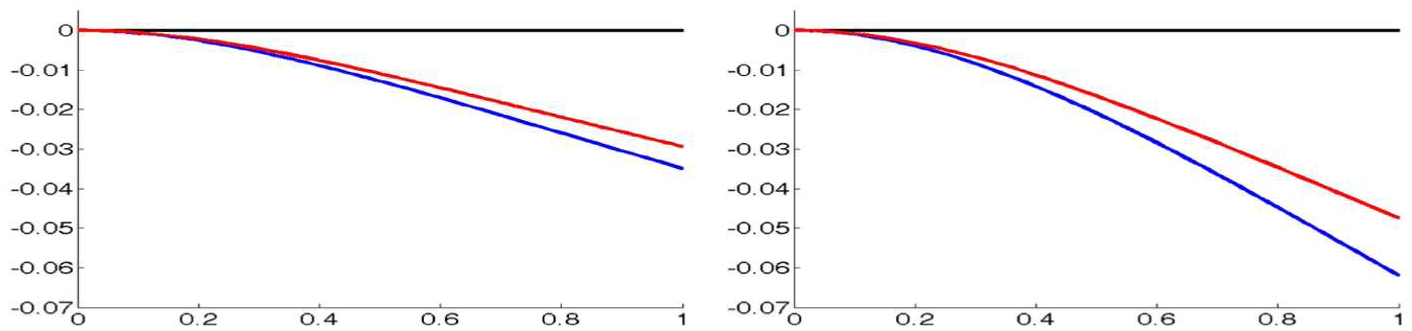
Bending problem (P3) with P = −1
Next we consider contact problems for the cantilever beam (see Figure 1) with constant vertical loading
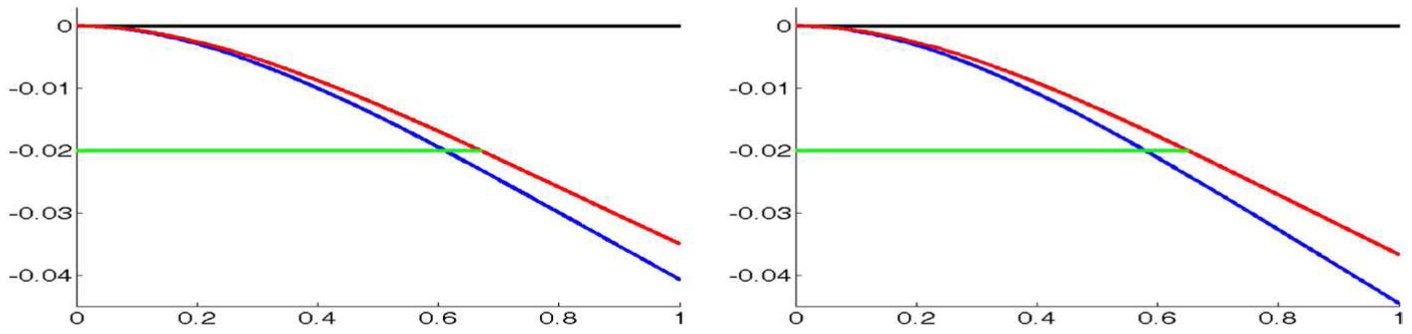
Problem (P3) with
The third example is concerned with the propped cantilever beam (see Figure 2) with constant vertical loading

Problem (P2) with
The last example is related to the simply supported beam (see Figure 3) with constant vertical loading
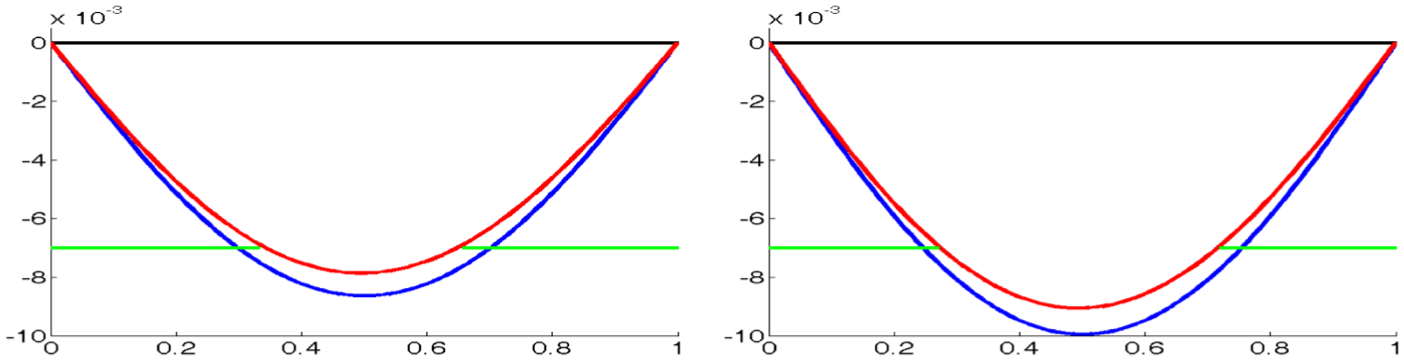
Problem (P4) with
Remark: From numerical experiments it was established that 32 finite elements lasts for sufficiently accurate computations.
6. Conclusion
In the papers by Sofonea and Tiba [8] and Barboteu et al. [9] the control variational method was applied to contact of a vertically loaded linear cantilever beam and an elastic foundation. Our research considerably generalizes these works as we consider a nonlinear beam, which is in addition also subjected to axial load and all standard boundary conditions can be applied. We also expanded and refined a numerical solution for this approach. Our examples show that the method works well. Furthermore, for the reduced state equation it goes evidently faster.
There is a natural direction for future research: extension of considered problems to nonconvex cases. The authors believe that the control variational method will be useful also for this purpose.
Footnotes
Appendix: Optimal control problem
Here we want to present a brief overview of basic concepts and results regarding the optimal control of problems governed by elliptic differential equations. They consist of the so-called state problem containing control parameter and optimization of certain functionals with respect to this control parameter. Especially we will deal with control by the right-hand side of the state equation, see Lions [21] and Tröltzsch [19].
where
Problem (88) will be called the variational formulation of the state problem and w will be the state of the system described by equation (88). Moreover, U will be the space of controls and
The state problem can also be formulated as a differential equation. But variational formulation (88) is more suitable especially if we want to use the FEM for its numerical solution.
Next we introduce the so-called cost or objective functional
The problem
is called the optimal control problem for the elliptic state equation (88) by the right-hand side.
Of course, we need to know the conditions that can guarantee the existence of a solution for the problem (89).
If J is weakly lower semicontinuous on
then the optimal control problem (89) has at least one solution.
Taking into account Theorem 5, we will always suppose that
Generally it is very useful to determine optimality conditions for our problem (89). If we introduce a linear operator
they can be established by means of the Lagrange multiplier technique as follows (see Machalová and Netuka [11])
where
Introducing analogously the adjoint operator
the expressions (92)–(94) can be rewritten as follows
Moreover, from equation (99) the operator form of the state equation
and from equation (97) the so-called adjoint equation
can be deduced.
Finally, we will study the dependence of the functional
From here we get
i.e. the mapping
This implies that
Now we denote
and let us analyze the properties of the mapping
Let J be differentiable on
Here we are able to rewrite the first term on the right-hand side. Let
Using this expression we obtain according to equations (96), (105) and (95) from equation (107) finally
or
Hence, by means of the adjoint state method we are able to evaluate the gradient of I(u).
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.