We study a new frictionless quasistatic contact problem for viscoelastic materials, in which contact conditions are described by the fractional Clarke generalized gradient of nonconvex and nonsmooth functions and a time-delay system. In addition, our constitutive relation is modeled using the fractional Kelvin–Voigt law with long memory. The existence of mild solutions for new history-dependent fractional differential hemivariational inequalities with a time-delay system are obtained by the Rothe method, properties of the Clarke generalized gradient, and a fixed-point theorem.
The mathematical theory of hemivariational and variational–hemivariational inequalities was first studied by Panagiotopoulos [1, 2]. Hemivariational inequalities can be used to describe various physical phenomena, which include nonconvex, nondifferentiable local Lipschitz functions, and have been considered extensively in a variety of mathematical theory analysis and engineering applications during the last 30 years, see [3–9] and the references therein. Recently, fractional hemivariational inequalities have attracted extensive attention and achieved good results in mathematical, physics and engineering research [10–14]. In particular, Zeng et al. [10] considered a class of fractional differential hemivariational inequalities with application to contact problems, using the Rothe method combined with the surjectivity result of multivalued pseudomonotone operators. Han et al. [11] investigated the creep and relaxation behavior for the Caputo fractional-order Maxwell model and the fractional Kelvin-Voigt model, and established the solvability, based on the Rothe method. Bartosz and Sofonea [15] proved an existence and uniqueness result using a time-discretization scheme known as the Rothe method for variational–hemivariational inequalities. Migórski and Zeng [16] showed, by applying the Rothe method, that unique solvability and solution regularity are about history-dependent hemivariational inequalities. For the fractional Kelvin–Voigt constitutive law and the fractional Maxwell constitutive law, see [11–13]. In addition, Jiang et al. [17] considered the existence of a global attractor for fractional differential hemivariational inequalities by applying a measure of noncompactness, a fixed-point theorem of a condensing multivalued map.
As we know, in real life, many systems are influenced by time-delay equations, for example, population dynamics, predator–prey models, and physiological systems [18, 19]. However, there are few studies on hemivariational inequalities with time delay. For hemivariational inequalities with time delay or viscoelastic materials with time delay, see [14, 20–22].
Motivated by these works, we consider a frictionless quasistatic contact problem for viscoelastic materials, in which contact conditions are described using the fractional Clarke generalized gradient of nonconvex and nonsmooth functions, and time delay.
Next, we briefly introduce the innovations of this paper, which are mainly divided into the following four points.
The motivation to study the inequality of the system comes from a quasistatic contact problem for a viscoelastic body and the fractional Kelvin–Voigt constitutive law, which includes a generalized Clarke subdifferential operator and long memory.
As far as we know, no scholars have considered that the pointwise fractional density of active bonds is affected by a delay system; this is different from the previous case [21, 22].
Notice that the generalized Clarke of contains and has a certain physical meaning. Therefore, the form of the hemivariational inequality with a time-delay system is different from that in [14, 20]. In particular, it is necessary to mention that our fractional hemivariational inequality is different from that of Zeng et al. [10].
The fractional hemivariational inequality with a history-dependent operator is not considered. In this paper, we will provide a global unique solvability for a history-dependent fractional hemivariational inequality, which is mainly based on the Rothe method.
The rest of the paper is structured as follows. In Section 2, we recall the physical setting of contact problem, notation, and definitions. In Section 3, we establish hemivariational inequalities for the quasistatic frictionless contact problem. In Section 4, we consider the abstract problem and prove its solvability.
2. Physical setting of contact problem and preliminaries
In this section, we review the physical setting of the contact problem and introduce the basic notation, definitions, and some results.
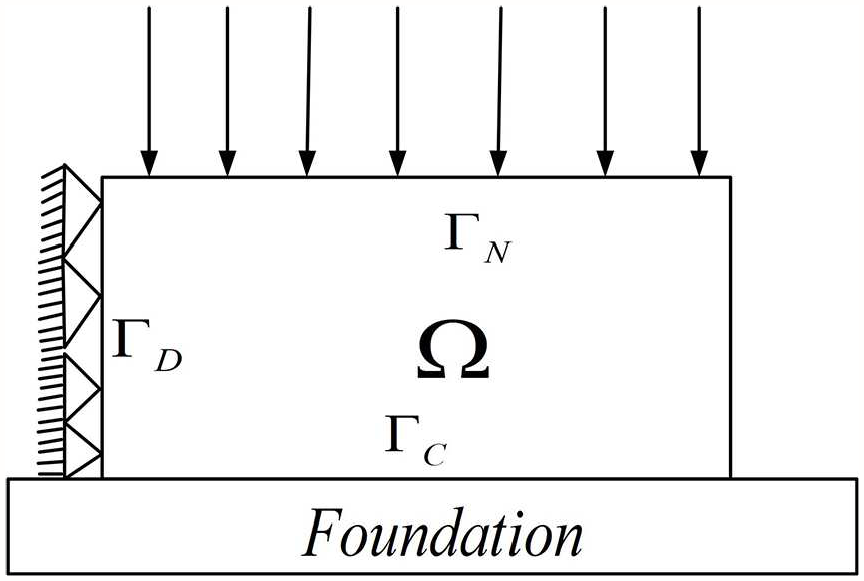
We study a deformable viscoelastic body, which occupies a domain . The boundary of , denoted , is assumed to be Lipschitz continuous. By Figure 1, we know that the boundary is consisted of three disjoint measurable parts , and , with means .
A deformable body in contact with a foundation.
Let be a unit outward normal vector and be the space of second-order symmetric tensors on . The standard inner products and norm on and are given by
where , , and denote the displacement vector, the stress tensor, and the linearized strain tensor, respectively. We denote by and the normal and tangential components of the displacement , respectively. The normal and tangential components of the displacement on are denoted by and , respectively. The contact problem will be discussed for a finite time interval . The classical formulation of the contact problem reads as follows.
Problem 1. Find a displacement field , a stress field , and a bonding field , such that
We now give a brief description of the equations and relations in Problem 1. Equation (1) is the fractional Kelvin–Voigt viscoelastic constitutive law with long memory, where and stand for the viscosity and elasticity operators, respectively, denotes the relaxation operator, and is a generalized Clarke subdifferential operator. For the fractional Kelvin–Voigt viscoelastic constitutive law and the Kelvin–Voigt viscoelastic constitutive law with long memory, we can refer to [11] and [16], respectively. In addition, motivated by Section 5 of [23], we consider the constitutive law that includes a generalized Clarke subdifferential operator.
Equation (2) is the equilibrium equation for the quasistatic process. Equations (3) and (4) reveal the displacement and traction boundary conditions on parts and .
Equations (5) to (8) represent the contact and frictionless conditions. Equation (5) is called the multivalued normal compliance condition, which is governed by the subdifferential of a nonconvex potential . Note that equation (5) contains . Therefore, it is necessary to introduce it here. By the definition of fractional integral and the Caputo derivative operators, we know that stands for the memory function on the surface . Conversely, the function denotes the pointwise density of active bonds on the contact surface. In [10], Zeng et al. introduce the physical meanings of , , and , respectively. We will not introduce them individually here. However, in practical situations, the roughness of the contact surface is different, and the contact surface is easily affected by temperature and other factors, see Figure 1. Therefore, it is necessary to consider that the function is driven by the delay evolution equation, that is,
where . However, in this paper, we consider a special case, equations (6) and (7).
Moreover, equation (8) represents the frictionless contact problem. Finally, the initial displacement is specified in equation (9).
To study Problem 1, we need to recall some basic notation, definitions, and preliminary results.
Assume that is a Banach space; is the topological dual of , and denotes the duality pairing between and . The norms of these spaces are defined as
where . We denote by the space of linear and bounded operators from a Banach space to a Banach space with the usual norm ∥·∥.
Next, we recall the properties of the fractional integral and the Caputo derivative operators.
Proposition 1. [24]. Assume that is a Banach space and . Then:
For , we have
For and , we have
For , we have
The fractional integral of order of is given by
Next, we will review the definition of generalized Clarke for a locally Lipschitz functional on a Banach space and recall some definitions.
According to [6, 7], we denote by the Clarke generalized directional derivative of at in the direction , that is
Recall also that the generalized Clarke subdifferential of at x, denote , is a subset of , given by
for all .
Definition 1. An operator on a reflexive Banach space is called
(i) monotone, if
(ii) strong monotone, if there exists such that
(iii) pseudomonotone, if for every sequence converging weakly such that we have
Moreover, we will recall the notion of pseudomonotonicity of a multivalued operator.
Definition 2. A multivalued operator is pseudomonotone if:
for every , the set is nonempty, closed, and convex;
is upper semicontinuous from each finite-dimensional subspace of to endowed with the weak topology;
for any sequences and , such that weakly in for all and , there exists such that
Lemma 1 Lemma 5 of [10].Let and be reflexive Banach spaces. The operator is linear, bounded, and compact. Denote by the adjoint operator of . Let be a locally Lipschitz function. There exists such that
for all . Then the multivalued operator defined by for is pseudomonotone.
We recall the following fundamental surjectivity theorem.
Theorem 1. Theorem 1.3.70 of [25].Let be a reflexive Banach space and be pseudomonotone and coercive. Then is surjective.
In this paper, we consider the spaces , and , as follows:
The space is endowed with the Hilbert structure
and the associated norm . For space , we consider the inner product
and the associated norm ∥·∥; is a separable and reflexive Banach space and has the associated norm . We denote by the space of fourth-order tensor fields given by
From the Sobolev trace theorem, there exists the smallest constant , such that
To study Problem 1, we give some hypotheses on the relevant data.
: the viscosity operator satisfies the following conditions:
for a.e. and .
with .
There exists such that
for a.e. .
: the elasticity operator satisfies the following conditions:
for a.e and .
with .
: the relaxation is Lipschitz continuous with constant .
: satisfies the following conditions:
is measurable on for all .
is locally Lipschitz continuous on .
for with .
There exists a constant such that
for , .
: the function is such that
is measurable on for all , and .
is locally Lipschitz on for all and .
There exists such that for all and a.e. .
for , all with .
is upper semicontinuous for a.e. , all .
: the force satisfies the following conditions:
the adhesive evolution rate function is such that
is measurable on for all .
for a.e. and all with .
There exists satisfying
matrices and satisfy
.
It is necessary to emphasize here that because of the form of the solution of equation (10), satisfies .
Next, employing Green’s formula, it is not difficult to obtain the following variational formulation.
Problem 2. Find a displacement vector and , such that
To this end, we need to define the following operators:
and
Meanwhile, we define the operators by
for all , a.e. . Moreover, let and be defined by
Meanwhile, by these definitions, Problem 2 can be reformulated as the following abstract fractional differential hemivariational inequality:
Conversely, by conditions , and , we come to the following conclusions.
the operator is linear, bounded, coercive, i.e.:
.
There exists such that
.
satisfies the following conditions:
is locally Lipschitz.
for all with .
There exists a constant such that
for all .
the function satisfies the following hypotheses:
is continuous for all .
is locally Lipschitz for all .
for all with .
for all , a.e. with .
is upper semicontinuous for all .
.
, where the function , satisfies the following hypotheses:
(i) For all is measurable.
(ii) There exists satisfying
for all .
(iii) There exists and satisfying
for all .
Remark 1. According to conditions , , , , and , it is not difficult to get , , , , and . Here, we will give the relationship of some parameters. , , , , , , and .
Here are our main results.
Theorem 2.Under the assumptions of , , , , , , and , for any given , and if the inequalities
hold, the history-dependent fractional differential hemivariational inequality has a unique solution. Here, .
Theorem 3.Under the assumptions of , , , , , , and , and if the inequalities
Lemma 6.Assume that conditions , , , , , , and hold. There exists such that, for all , equation (17) has at least one solution.
Proof. According to equation (18), we get . Conversely, to get our conclusions, we need to prove that the multivalued operator
is surjective, where
We introduce two multivalued operators :
We claim that is pseudomonotonic. Indeed, by , and Lemma 20 of [29], we can easily obtain it. Here we briefly prove it. First, for all , the set is nonempty, closed, and convex in . By Proposition 5 of [29], we imply that is generalized pseudomonotonic. Next, we show that the operator is strongly monotonic. By conditions , , , and , we have
Let weakly in , weakly in , and . By the strong monotonicity of , we have
we imply that in . By conditions , , , and and Lemma 20 of [29], we have . By weakly in and in , we have . Therefore, is generalized pseudomonotonic and pseudomonotonic, which completes the pro is pseudomonotonic. Indeed, according to and , we have
for all . Moreover, by Lemma 1, we complete the proof of the assertion. Conversely, according to , we have
for all . Let in and weakly in with , by Proposition 2.4 of [30], we have
According to the definition of pseudomonotonicity and , is pseudomonotonic. Therefore,
Meanwhile, take
if and by equation (24), we obtain . It follows from equation (25) and Theorem 1 that the operator is surjective. According to Lemma 1, there exist , and , such that equation (17) holds. We complete the proof of the lemma. □
Lemma 7.Assume that conditions , , , , , , and hold. For all , the solutions to equation (17) satisfy the following inequalities:
and
where and satisfy
for
Proof. According to condition , we can easily infer that there exists , such that
for all . Conversely, taking , it follows from equation (17) that
Proof. According to Lemma 9, we know that equation (16) has at least one solution. Next, for any given , we will show that equation (16) has a unique solution. Indeed, let be the solution to equation (16). Then, there exist such that
where and . Then
It follows from that
By , we have
By conditions , , , , , and and equation (32), we have
According to the condition of Theorem 4, we imply that
Conversely, by Proposition 1(d), we have
Therefore, for a given , equation (14) has a unique solution . Namely, Problem 3 has a unique solution , which completes the proof of Theorem 4.
According to Lemma 10, we complete the proof of Theorem 4. By the definition of , we take and . Conversely, by Lemma 10, the condition of Theorem 4, and the condition of Theorem 2, we complete the proof of Theorem 2.
Next, we will consider Theorem 3. For equation (10), we will use Schauder’s fixed-point theorem to prove an existence theorem.
Theorem 5.Assume that and hold. Then equation (10) has at least one mild solution.
Proof. For any given , we define an operator ∑ as
According to condition , we deduce that ∑ is well defined.
Step 1. There exists a bounded closed ball , such that . By Lemmas 3 and 4, we have
Therefore, we complete the proof of step 1.
Step 2. the operator is continuous. Assume that and in ; for any , we have
In addition, by , it is easy to get step 2.
Step 3. is equicontinuous. Let us divide into two parts, as
where
and
To prove this part, we will divide it into two cases.
Case 1. For any and , if , we have
Then, as , we have
Conversely, according to condition and the Hölder inequality, we have
Case 2. For any , if ,
According to Lemmas 3 and 4, we have
where .
By Lemma 4, we have
and
where .
Similarly, by Lemma 4, we obtain
Conversely, we have
By , we have
and
where .
Similarly, we have
where .
Thus, by cases 1 and 2, we complete the proof of step 3.
In addition, according to step 1 and the Ascoli–Arzela theorem, we imply that is compact. Therefore, by the Schauder fixed-point theorem, we imply that equation (10) has a fixed point. The proof is complete. □
By Theorems 2 and 5, there exists satisfying equation (12). Thus, we complete the proof of Theorem 3.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 12161015 and 12001120), Training Object of High Level and Innovative Talents of Guizhou Province (grant number (2016)4006) and Guizhou Data Driven Modeling Learning and Optimization Innovation Team (grant number (2020)5016).
ORCID iD
JinRong Wang
References
1.
NaniewiczZPanagiotopoulosPD. Mathematical theory of hemivariational inequalities and applications. New York: Marcel Dekker, Inc., 1995.
2.
PanagiotopoulosPD. Hemivariational inequalities: Applications in mechanics and engineering. Berlin: Springer-Verlag, 1993.
LiuZHZengSD. Differential variational inequalities in infinite Banach spaces. Acta Math Sci2017; 37: 26–32.
5.
ChenXWangA. Differential variational inequality approach to dynamic games with shared constraints. Math Program2014; 146: 379–408.
6.
MigórskiSGamorskiP. A new class of quasistatic frictional contact problems governed by a variational-hemivariational inequality. Nonlinear Anal Real World Appl2019; 50: 583–602.
7.
MigórskiSZengS. A class of differential hemivariational inequalities in Banach spaces. J Global Optim2018; 72: 761–779.
8.
MigórskiSZengS. Hyperbolic hemivariational inequalities controlled by evolution equations with application to adhesive contact model. Nonlinear Anal Real World Appl2018; 43: 121–143.
9.
HanWMigórskiSSofoneaM. Analysis of a general dynamic history-dependent variational–hemivariational inequality. Nonlinear Anal Real World Appl2017; 36: 69–88.
10.
ZengSDLiuZHMigórskiS. A class of fractional differential hemivariational inequalities with application to contact problem. Z Angew Math Phys2018; 69(2): 36.
11.
HanJFMigórskiSZengHD. Weak solvability of a fractional viscoelastic frictionless contact problem. Appl Math Comput2017; 303: 1–18.
12.
HerrmannR. Fractional calculus: An introduction for physicists. Singapore; World Scientific, 2011.
13.
YangQTurnerILiuF, et al. Novel numerical methods for solving the time–space fractional diffusion equation in two dimensions. SIAM J Sci Comput2011; 33: 1159–1180.
14.
WengYHLiXSHuangNJ. A fractional nonlinear evolutionary delay system driven by a hemivariational inequality in a Banach space. Acta Math Sci2021; 41: 187–206.
15.
BartoszKSofoneaM. The Rothe method for variational-hemivariational inequalities with applications to contact mechanics. SIAM J Math Anal2016; 48: 861–883.
16.
MigórskiSZengSD. Rothe method and numerical analysis for history-dependent hemivariational inequalities with applications to contact mechanics. Numer Algorithms2019; 82: 423–450.
17.
JiangYRHuangNJZhouCW. Existence of a global attractor for fractional differential hemivariational inequalities. Discrete Contin Dyn-B2020; 25: 1193–1212.
18.
SmithH. An introduction to delay differential equations with applications to the life sciences. New York: Springer, 2011.
19.
ErneuxT. Applied delay differential equations. New York: Springer, 2009.
20.
WangXQiYWTaoCQ, et al. A class of delay differential variational inequalities. J Optim Theory Appl2017; 172: 56–69.
21.
OgorzalyJ. Quasistatic bilateral contact problem with time delay for viscoelastic materials. Math Mech Solids2016; 21: 1068–1081.
22.
YaoSSHuangNJ. A class of quasistatic contact problems for viscoelastic materials with nonlocal Coulomb friction and time-delay. Math Model Anal2014; 19: 491–508.
23.
CosteaNMateiA. Contact models leading to variational–hemivariational inequalities. J Math Anal Appl2012; 386: 647–660.
24.
KilbasAASrivastavaHMTrujilloJJ. Theory and applications of fractional differential equations. Amsterdam: Elsevier, 2006.
25.
DenkowskiZMigórskiSPapageorgiouNS. An introduction to nonlinear analysis: Applications. Boston: Kluwer Academic, 2003.
26.
KhusainovDYShuklinGV. Linear autonomous time-delay system with permutation matrices solving. Stud Univ Žilina2003; 17: 101–108.
27.
MedvedMPospišilMŠkripkováL. Stability and the nonexistence of blowing-up solutions of nonlinear delay systems with linear parts defined by permutable matrices. Nonlinear Anal Theory Methods Appl2011; 74: 3903–3911.
28.
ShenSLiuFChenJ, et al. Numerical techniques for the variable order time fractional diffusion equation. Appl Math Comput2012; 218: 10861–10870.
29.
MigórskiSOchalASofoneaM. A class of variational-hemivariational inequalities in reflexive Banach spaces. J Elast2016; 127: 151–178.
30.
HanJLuLZengS. Evolutionary variational–hemivariational inequalities with applications to dynamic viscoelastic contact mechanics. Z Angew Math Phys2020; 71: 267–291.