
Abstract
Accretion and ablation, i.e., the addition and removal of mass at the surface, are important in a wide range of physical processes, including solidification, growth of biological tissues, environmental processes, and additive manufacturing. The description of accretion requires the addition of new continuum particles to the body, and is therefore challenging for standard continuum formulations for solids that require a reference configuration. Recent work has proposed an Eulerian approach to this problem, enabling side-stepping of the issue of constructing the reference configuration. However, this raises the complementary challenge of determining the stress response of the solid, which typically requires the deformation gradient that is not immediately available in the Eulerian formulation. To resolve this, the approach introduced the elastic deformation as an additional kinematic descriptor of the added material, and its evolution has been shown to be governed by a transport equation. In this work, the method of characteristics is applied to solve concrete simplified problems motivated by biomechanics and manufacturing. Specifically, (1) for a problem with both ablation and accretion in a fixed domain and (2) for a problem with a time-varying domain, the closed-form solution is obtained in the Eulerian framework using the method of characteristics without explicit construction of the reference configuration.
1. Introduction
Accretion or surface growth involves the addition of mass at the boundary of a body. In a continuum setting, this requires the introduction of new material particles to the body [1], and poses unusual challenges. Surface growth occurs in a range of settings, including in biological tissue [2], planetary formation [3, 4], solidification and casting processes [5], etching processes in silicon wafers [6], additive manufacturing processes [7], the construction of masonry structures [8], and cell motility through the assembly and disassembly of actin networks [9].
The addition and removal of material points in surface growth causes difficulties in the usual procedure of defining a fixed set of points as the reference configuration. Dealing with this in linear elasticity is somewhat easier [3, 8, 10–12]. However, in non-linear descriptions of surface growth, the definition of the reference configuration is more subtle. Pioneering work by Skalak, Hoger, and coworkers provided a systematic approach to study the kinematics of surface growth [1, 13]. However, these studies did not consider deformation, and assumed that the body was rigid. Recent work has extended these ideas to account for deformation and stress [14–23]. These studies used a Lagrangian formulation, i.e., the kinematic description is roughly based on reference particles in an evolving reference configuration.
To avoid the difficulties of dealing with an evolving reference configuration, our previous work [24] developed an Eulerian description of surface growth. This has the advantage that we do not need to calculate the reference configuration explicitly, e.g. [25–27]. Conversely, in a solid, the stress response requires knowledge of the deformation gradient
While the Eulerian approach works well for the standard setting of a fixed set of material particles without growth, there is the challenge of defining the reference state and kinematic information of the added material particles during surface growth. Specifically, the specification of
The evolution of
We apply this formulation to examine two simplified concrete problems of recent interest. In the first problem, motivated by the assembly and disassembly of actin microfilaments during polymerization and depolymerization on a spherical bead [31, 32], and building on the model of this phenomenon from [17], we examine simultaneous accretion at the fixed inner surface and ablation at the time-dependent outer surface of a hollow sphere. In the second problem, motivated by the wound roll process of additive manufacturing, which has been applied to processes ranging from the packaging of flexible films in paper and magnetic tape industries [33] to tissue engineered blood vessels [34], we study the deformation and stress distribution when stress-free particles are deposited at the outer layer of a hollow cylinder with a time-dependent pressure applied at the inner surface. We solve these problems in closed form with the method of characteristics, using the fact that the evolution of
1.1. Organization
Section 2 summarizes the approach proposed in [24]. We start with a discussion on balance laws and jump or boundary conditions, using the view of surface growth as a localized source on the growing surface. We then turn to the kinematics of the deformation in the Eulerian setting with accretion. Sections 3 and 4 solve specific examples of (1) simultaneous accretion at the fixed inner surface and ablation at the time-dependent outer surface of a hollow sphere and (2) accretion on the outer surface of a long hollow cylinder with a time-dependent pressure applied at the inner surface. We use the method of characteristics to solve the transport equation that governs the evolution of the elastic deformation.
2. Physical model and governing equations
2.1. Notation
The motion is denoted
Because most of our work is in the Eulerian setting, all differential operators (e.g.
2.2. Balance laws
Following [24], we model surface growth through the introduction of sources that are localized on the growing surface. The source terms can be understood as a coarse-grained approach to treat the complex process of growth without considering the fine details of the processes in the ambient environment outside the growing body; the growth is defined only in terms of net mass and linear momentum transfer. To define the source terms, we specify the rate of mass addition per unit area,
The source terms appear in the jump conditions that represent the balances of mass and momentum at the growing surface:


We have used the jump operator [[·]] to denote the difference between the limits when approaching the surface of discontinuity from either side;
We make the assumption that the ambient environment outside of the growing body has a negligible effect on the mechanics of the body. This leads to the significant simplification that the domain of the problem now involves only the solid body, and the jump conditions become boundary conditions:


where
The balance laws in the bulk are standard: 1


where
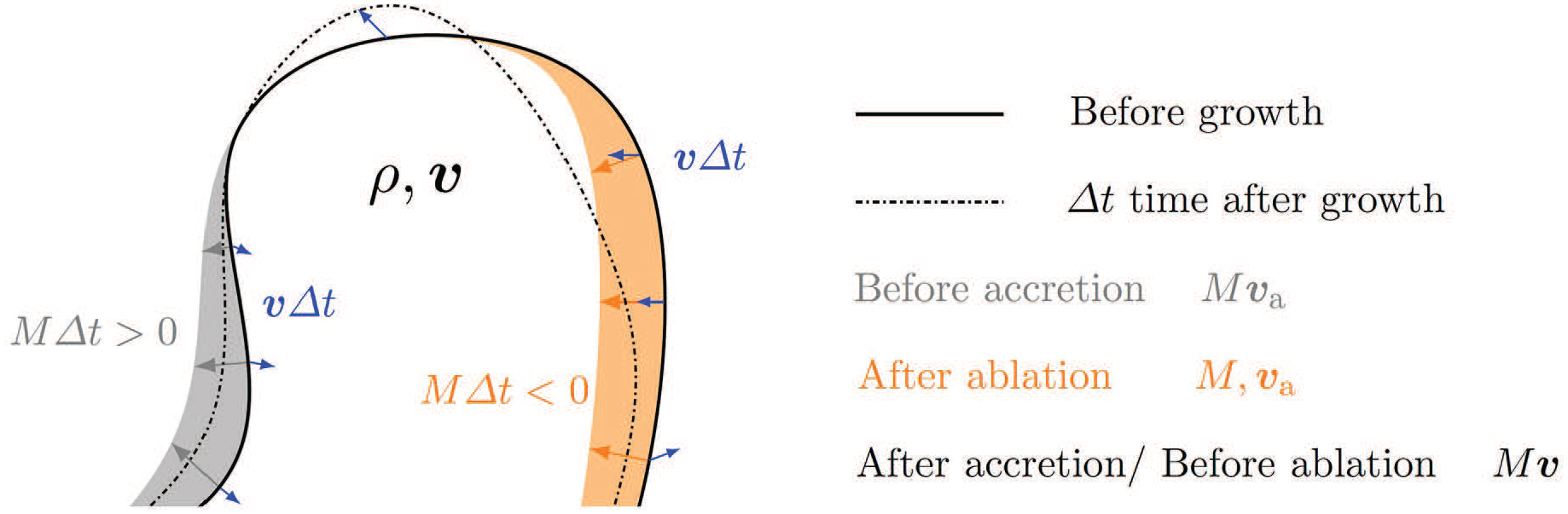
Evolution of a growing body in a small interval of time
2.3. Kinematics
The stress response of the material generally requires knowledge of the deformation gradient

we notice that it requires knowledge of the motion or its inverse. However, we adapt the approach from [28] that formulates the evolution of
We can write the material time derivative of

where

While this equation preserves the kinematic compatibility of
We therefore introduce two additional kinematic descriptors:
Substituting

We have assumed that

Reference [24] discusses the more general case where
To compute the stress response of the body, we only need to know
No boundary condition on
Remark 1. Properties of the evolution equation. The form of equation (9) suggests the method of characteristics. Introducing the parametric variable



in a fixed Cartesian basis, and we have used index notation with implied summation.
The equations of the characteristic curves are defined by equations (10) and (11):

and equation (12) governs the behavior of
Remark 2. Path lines of the motion. Comparing the transport equation (equation (9)) with the transport equation of
2.4. Summary of the proposed approach
Our approach requires the solution of the balances of mass and momentum, and the transport of the elastic deformation. In summary, we solve the three coupled equations given by

where
3. Hollow sphere with accretion at the inner and ablation at the outer surface
In this section, we consider a hollow sphere with accretion and ablation. The accretion occurs on the inner fixed boundary and the ablation occurs on the outer boundary simultaneously. This example is motivated by the assembly and disassembly of actin microfilaments during polymerization and depolymerization on a spherical bead [31, 32], and builds on the model of this phenomenon proposed in [17]. While we find the general solution, in the special case that there is no initial body, our solution reduces to that reported in [17], where it was solved using a Lagrangian approach with a four-dimensional manifold as the reference configuration.
For the stress response, we use an incompressible neo-Hookean form:

where
A schematic of the problem is given in Figure 2. We denote quantities related to the inner and outer surfaces using the subscripts

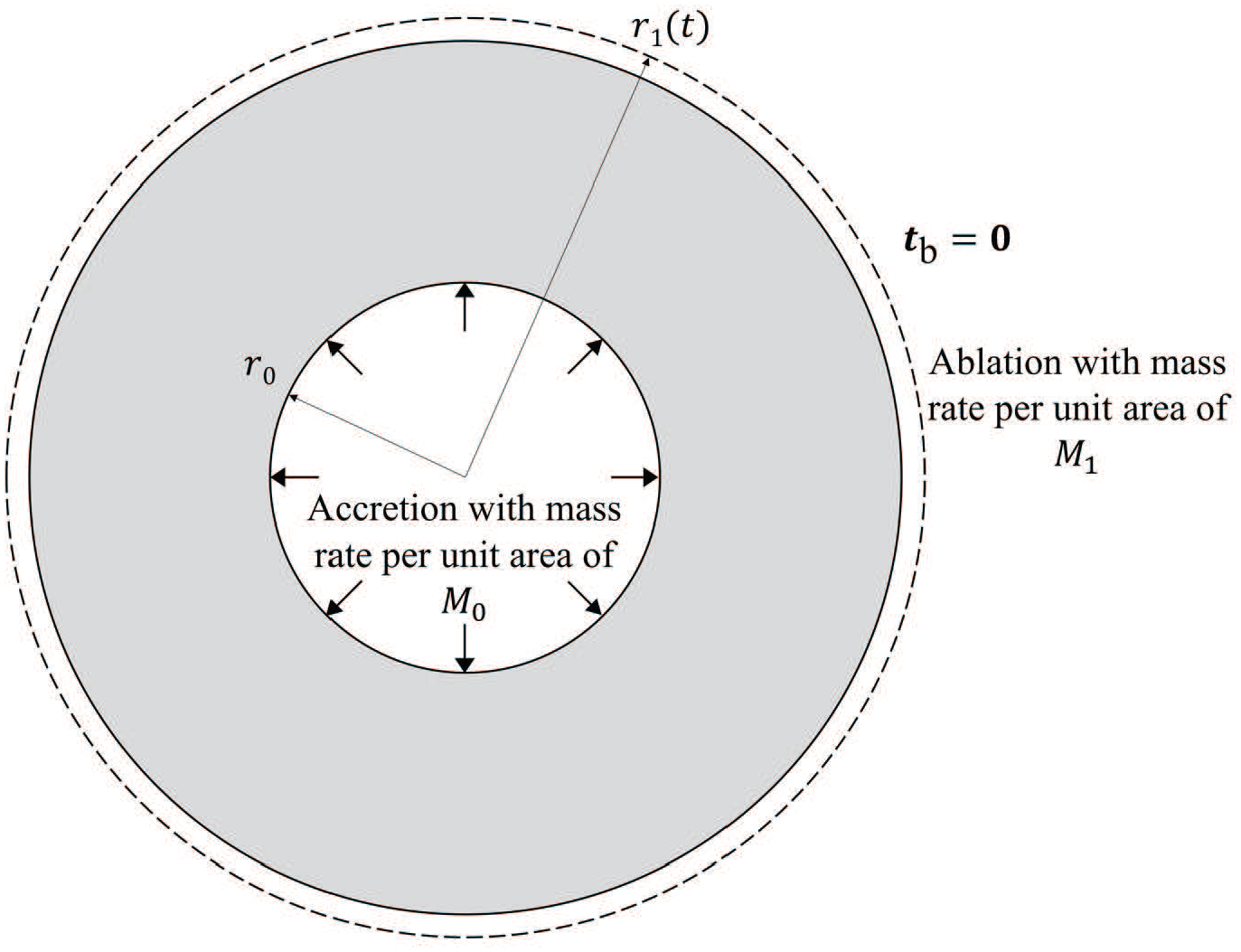
Hollow spherical body with accretion at the inner fixed radius and ablation at the outer time-dependent radius.
3.1. Boundary and initial conditions
The inner radius is fixed and is equal to
Also, mass is removed from the outer surface at the ablation rate
The outer boundary is traction-free.
These velocity relations correspond to those given by Tomassetti et al. [17]. However, Tomassetti et al. [17] obtain
We next turn to the deformation and stress states of the added particles. Since the added particles are composed of the same material as the body, they have the same stress response. We assume that no tractions are imposed on the inner surface and the attaching particles are stress-free, up to an interior hydrostatic pressure
Finally, for the initial conditions, we use
3.2. Reduced governing equations
As the accretion velocity is radial and there is no shear traction, we assume that the motion is independent of

Based on the definition of the problem, the governing equations (equation (14)), together with the stress response (equation (15)), for a neo-Hookean incompressible body reduce to the following:








3.3. Solution
Using the boundary condition (equation (19)), the continuity equation (equation (18)) gives us the velocity field:

We next notice that we can write equation (23) as

These differential equations are homogeneous, i.e., there is no source term on the right, and therefore those components with zero initial and boundary conditions remain zero during the growth process. Hence, the off-diagonal components of

The evolution equation (equation (23)) and the initial (assuming


3.3.1. The characteristic curves
To solve equations (28) and (29), we use the method of characteristics, similar to the discussion in Remark 1, because of the convective nature of the equations. The parametric representation of the characteristic lines for both of these equations is


where
Assuming that all the characteristic curves start from
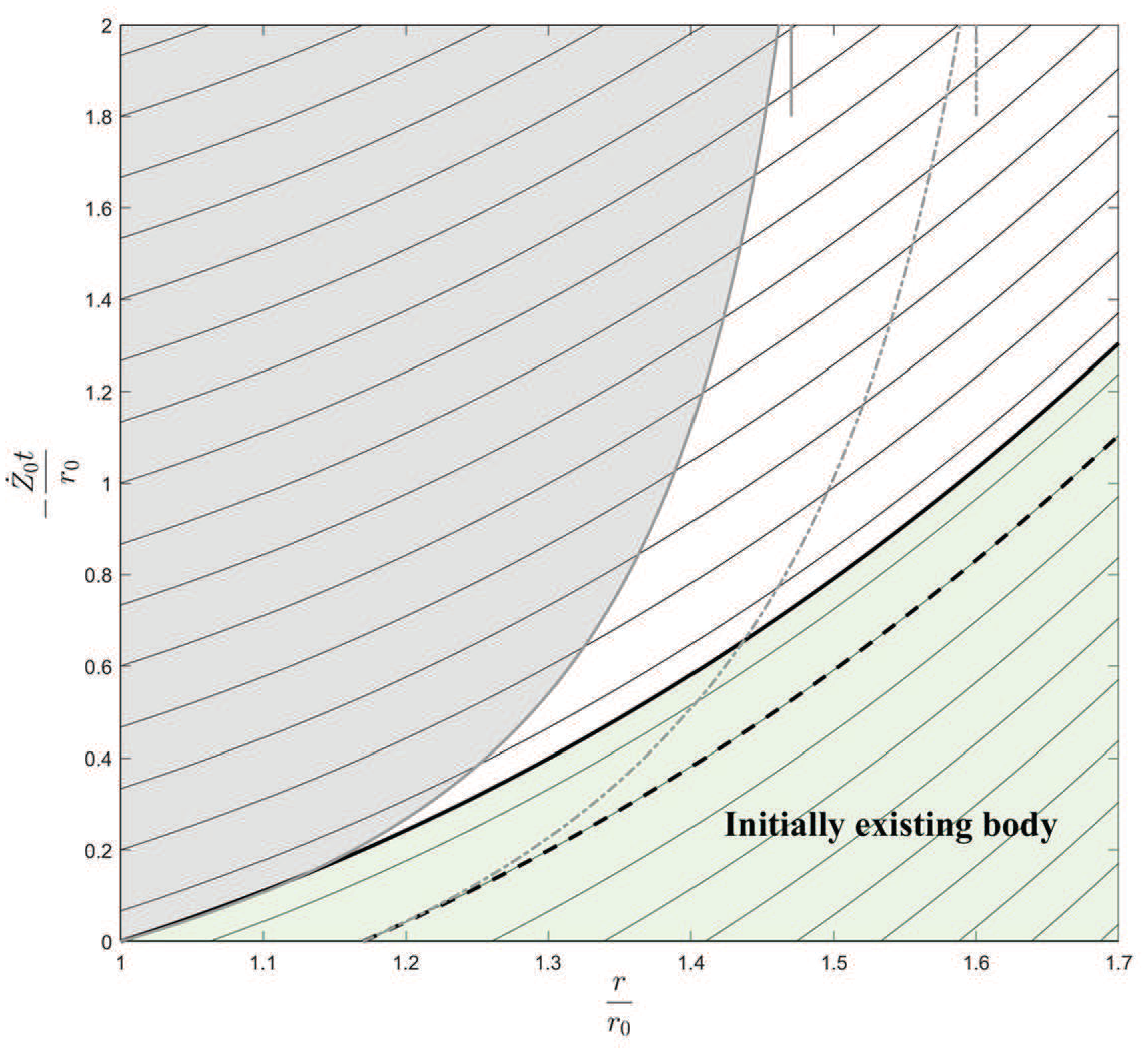
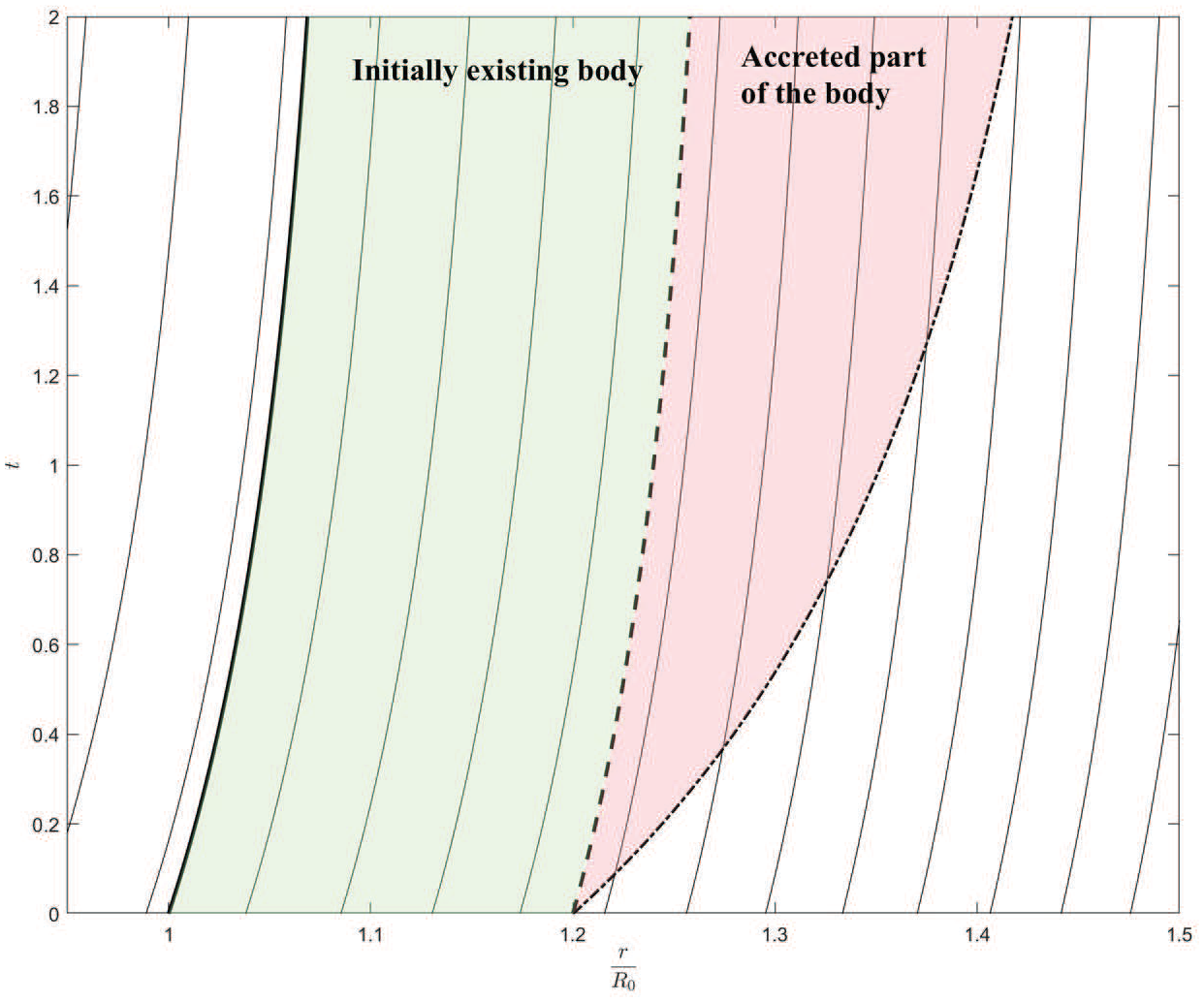
Characteristic curves that convect initial and boundary deformation through out the space–time domain. (1) The solid non-bold curves are the characteristic curves; (2) the bold black curve distinguishes the initial body (green region) from the added particles (non-green region), and is also the outer radius when there is no ablation and no initial body; (3) the black dashed curve shows the outer radius in the case of no ablation and the existence of an initial body; (4) the gray shaded area shows the body when there is ablation and no initial body; (5) the gray dot-dashed curve shows the outer radius in the case of both ablation and existence of the initial body.
Instead of distinguishing different characteristic curves by their intersection with the line
The information about
Each characteristic curve in the lower region shows the location of a particle that was at specific non-dimensional radius
When there is no ablation (

This is the equation of the black solid bold curve.
However, if there exists an initial body with inner and outer radius
Finally, we consider the case when there is ablation but no initial body, following [17]. The non-dimensional outer radius of
3.3.2. Evolution of the deformation gradient
To compute the non-zero components of deformation gradient, we consider the scalar equations (equations (28) and (29)) separately, as their right-hand sides are different.

Combining this with equation (31) gives

The unknown function

The boundary condition is also

The function
Putting these together, we have

Therefore, in the problem defined in [17], where there is no body at initial state but there is ablation at the outer surface,
Solving equation (29) for

Combining this with equation (31) gives

The unknown function

For the problem defined in [17],
3.4. Solution for the special case with no initial body and with ablation at the outer surface
For the example defined in [17], where there is no initial body and

As the process of addition of material is smooth, there is no jump in traction boundary conditions to change
Our calculation of
Finally, substituting equation (33) into equation (25), the Cauchy stress tensor is

To determine the unknown Lagrange multiplier function

which agrees with the Cauchy stress tensor derived in [17].
4. Hollow cylinder with accretion at the outer surface
In the previous example, accretion occurred at a surface with a known location. Here we will consider the case that accretion occurs at an unknown time-dependent surface. Specifically, we consider a long hollow cylinder made of a general incompressible material with time-dependent inner and outer radii, with accretion occurring on the outer surface and traction applied on the inner surface. The formulation is motivated by the wound roll process of additive manufacturing, which has been applied to processes ranging from the packaging of flexible films in paper and magnetic tape industries [33] to tissue engineered blood vessels [34]. The material is an incompressible and isotropic hyperelastic solid with an energy function
We assume that we can neglect the end effects and assume plain strain. Therefore, we use a two-dimensional polar coordinate system:

This problem was solved in [14] using a geometrical Lagrangian approach with two different choices of metric for the initial and added parts of the body. We discuss next the fact that the choice of the growth velocity does not change the Eulerian formulation, but it can make the Lagrangian formulation more complicated as the time of attachment has to be related to the location in the reference configuration. We also show that one can solve an Eulerian growth process using the evolution of inverse of the motion via the method discussed in [29], rather than computing the deformation gradient directly using equation (9).
4.1. Boundary and initial conditions
We denote the time-dependent inner and outer radii by
The body is initially stress-free, and an internal pressure of
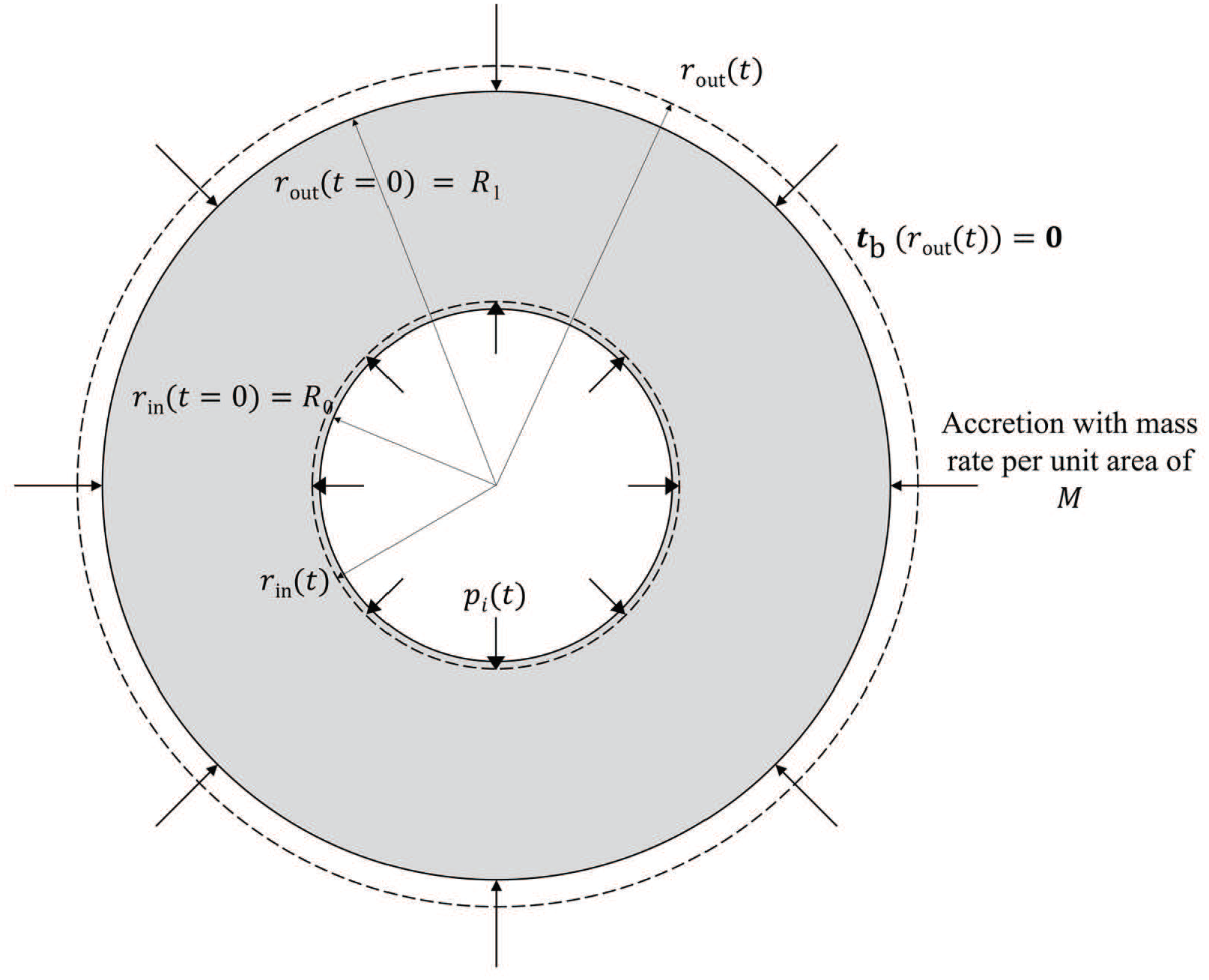
Very long hollow cylinder body with outer accretion: the gray body is the initial body and the dashed lines show the time-dependent boundary of the growing body
There is no ablation, and the accretion occurs only at the outer surface. The mass rate of growth
4.2. Reduced governing equations
From the symmetry of the problem, we assume that no quantities of interest depend on









As the initial and inlet boundary conditions of
4.3. Solution
The solution of the continuity equation (equation (36)) using the boundary condition of equation (38) is

and

Similar to the previous example,


We solve these using the method of characteristics, similar to the previous example. The parametric equations of the characteristic curves are


As in the previous example, we assume that all the characteristic curves start at

the function

The integration constant
Path lines of the motion in space–time. The outer radius is marked by the bold dot-dashed line, and the inner radius by the solid bold line; the time-dependent growing body lies between these radii. The characteristic curve starting at
We can also substitute for

where
Using equations (47) and (48),

Combining this with equation (51), the general forms of


where
Considering the characteristic curve starting at

where
4.3.1. The region that was initially in the body
Considering the region that formed part of the initial body, the characteristic curves from equation (51) can be used to substitute


Using the initial condition of

Using equation (51), for a particle that was initially (

So, we can write

We notice that this agrees with [14], because the initial body is stress-free, and hence the initial configuration is also the reference configuration for this part of the body.
Substituting

To compute the unknown pressure field

As

Using the boundary condition (equation (41)),

and


Using
To compare this result with that given in [14], we need to write equation (62) based on the reference configuration and in Lagrangian form. Using equation (59), we have

4.3.2. The region that is added to the body through the growth process
In the region that is governed by the outer boundary conditions, it is more convenient to use equation (52) to compute the characteristic curves as it involves the outer part of the body, in contrast to equation (51). So, for


Using the boundary condition from equation (43) at


To compute

Using equation (52) for a particle that is initially at the outer radius of

In Figure 5,
Further, for a particle that is at

Using this equation and the boundary conditions (equations (67) and (68)), we get



So, the deformation gradient in this region is

Now, we need to compute

The (as yet unknown) functions
Although we want to compute
We notice that we could alternatively find

And obviously the attachment radius of each particle is the outer radius of the body at the time of attachment
Now that

To find the unknown pressure field

Using traction continuity at the interface between the initial and added material (located at
We note that

This is in agreement with [14].
4.4. Computing the deformation gradient using the inverse of the motion
An alternative Eulerian approach to find

From symmetry, we have

which is the
Using the method of characteristics, the characteristic curves are the same as those from equations (51) and (52). However, as the right-hand side of this equation is zero, it means that

We can then compute

This region is influenced by the initial condition, which is

Therefore, the explicit expression for

which is, as expected, identical to equation (58).
In the region governed by the boundary condition, we have from equation (80) that

At

Now, we need
Therefore,

which is identical to equation (74).
Instead of using the initial condition on

However, in the region governed by the boundary condition, converting the boundary condition on
5. Discussion
In this paper, we model the surface growth of solid bodies using an Eulerian approach. An important advantage of this approach is that we do not need to compute the time-evolving reference configuration explicitly. Conversely, to obtain the stress, we need to solve for the deformation gradient, which is not straightforward in the Eulerian setting. This is addressed by introducing the elastic deformation field and the associated transport equation that governs its evolution. To solve this time-dependent transport equation, we use the method of characteristics that enables us to find closed-form solutions in two examples with spherical and cylindrical symmetry with free boundaries.
The primary motivation for formulating the Eulerian approach is to enable future work on numerical solutions. A potential advantage of Eulerian methods that have been developed in the fluid–structure interaction (FSI) literature (e.g. [36]) is that we can solve such problems on a fixed mesh for an evolving body, rather than an evolving reference configuration and deforming mesh that needs to be updated or re-meshed frequently. A numerical scheme would enable the careful study of various interesting systems identified recently, e.g. [22, 23, 37], which focus on the problem of near-net-shape manufacturing in the presence of incompatibility and residual stress, as well as [38], which discusses incompatibility in both surface and bulk growth.
An important challenge in the Eulerian formulation is to know the location of the boundaries to be able to apply the boundary conditions. We refer to the brief discussion in Section 3.3.1 of [24], as well as [29, 30], and, noticing that the velocity field can be used to locate the boundary of the body for the parts of the boundary without growth, we follow the characteristic lines of particles located on the boundary; for the parts with growth, we use equation (3) together with the path lines to determine the location of the growing boundaries.
Briefly, we also highlight that bulk growth has received much attention, e.g., using growth tensors [39–42], geometrical approaches [43], and mixture theory [44]. A key difference between bulk and surface growth is that the former can typically be studied by assuming that the set of the material points is unchanged, and that growth occurs through a change in the referential density, owing to a distributed mass source.
Footnotes
Acknowledgements
We thank Rohan Abeyaratne, Timothy Breitzman, Tal Cohen, and Tony Rollett for useful discussions.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Science Foundation (grant numbers CMMI MOMS 1635407, DMREF 2118945, DMS 1729478, DMS 2012259, DMS 2108784), the Army Research Office (grant number MURI W911NF-19-1-0245), the Office of Naval Research (grant number N00014-18-1-2528), and the Binational Science Foundation (grant number 2018183).