
Abstract
Numerical experiments reveal unusual deformation patterns in a cylindrical lattice shell, modeled as a curved two-dimensional second-gradient elastic surface.
Keywords
1. Introduction
In recent research in mechanical science, greater and greater importance is being given to metamaterials theory and the problem of their synthesis [1–4]. The more specific theory of higher gradient continua provides an interesting set of macroscopic models showing exotic mechanical behavior. It was first formulated by Gabrio Piola [5] on purely logical grounds but later revealed itself to be a powerful tool [6,7] in the design and description of innovative materials. As a consequence, the particular problem of synthesis of second-gradient continua has attracted the interest of many authors: The problem consists in finding a micro-structure (or micro-architecture) that, after homogenization, produces the chosen second-gradient deformation energy. A first result in this line of research is given in previous works [8,9], where the peculiar properties of pantographic micro-architectures are explored in the linear case. The mathematical problems associated to the search for equilibrium configurations of planar pantographic sheets are not trivial and required the development of suitably adapted techniques [10–12]. Mathematical properties of solutions of boundary-value problems for pantographic lattice thin structures are discussed by Eremeyev et al. [13], where various generalized media are analyzed. Moreover, it has been proven that pantographic micro-architecture allows for the synthesis of metamaterials for which large elastic deformations are possible [14,15]. The role of pivots in pantographic micro-structure is determinant for pantographic sheet macro-behavior [2,3]. In fact, a small change in pivots’ properties produces systems whose mechanical behavior is significantly different: when the two families of pantographic fibers are rigidly connected, the model of micropolar shell must be introduced [16,17]. Metamaterial theory is then a fertile source of both interesting mathematical problems and innovative engineering solutions.
Homogenization techniques may be applied at different levels of mathematical rigor: the asymptotic expansion methods used by Piola are nowadays considered as an heuristic tool useful for conjecturing results to be rigorously proven, for instance by means of gamma convergence techniques [18,19]. Pantographic architectures have been homogenized by means of intermediate discrete meso-models in which extensional and rotational springs play the role of elastic elements [20–22]. The obtained equations for planar pantographic sheets have been generalized to deal with pantographic sheets moving in space by means of the heuristic procedure presented by Giorgio et al. [23].
In the present contribution, the energy introduced in the latter paper is used to study the deformation of a cylinder obtained by joining the opposite long sides of a planar rectangular pantographic sheet. More precisely, we exercise the lattice shell model developed by Giorgio et al. [23], regarded as a second-gradient elastic surface, to illustrate some unusual modes of deformation occurring in a cylindrical lattice shell subjected to twist about its axis. Here, the lattice geometry (generalizing) [24,25] is conferred by a set of initially orthogonal helical fibers that are densely distributed over the cylinder to form a surface. These helices are, in turn, the result of mapping a plane orthogonal grid of fibers onto a right circular cylinder prior to the application of equal and opposite rotations at its boundaries.
The basic model, given in prior works [23,26,27], is a special case of the general theory of lattice shells formulated by Steigmann [28]. This in turn is similar in concept to a theory formulated by Spencer and Soldatos [29], in which the flexural response of densely distributed fibers embedded in a matrix material is modeled using strain-gradient elasticity theory, hence accounting for the effects of fiber stretching and bending as the presented model does.
Section 2 is devoted to a recapitulation of the model. This is specialized to cylindrical shells in Section 3, and the weak form of the associated equations, underpinning our numerical analysis, is discussed in Section 4. Numerical simulations were conducted using the commercial software package Comsol, which requires only the weak form as input. The code then constructs an associated finite-element scheme and associated solution procedure.
This work extends the earlier work [26], concerned with axisymmetric modes of deformation, to arbitrary deformations. Our simulations reveal unusual deformation patterns in a twisted cylinder, suggesting that lattice shells of the kind considered offer a range of interesting possibilities for the design of fibrous materials.
2. Strain-energy density
We consider a cylindrical elastic surface embedded with two arrays of fibers continuously distributed, following a helicoidal path and having orthogonal tangent vectors in the interconnecting points. The elastic surface in equilibrium is described by the position field
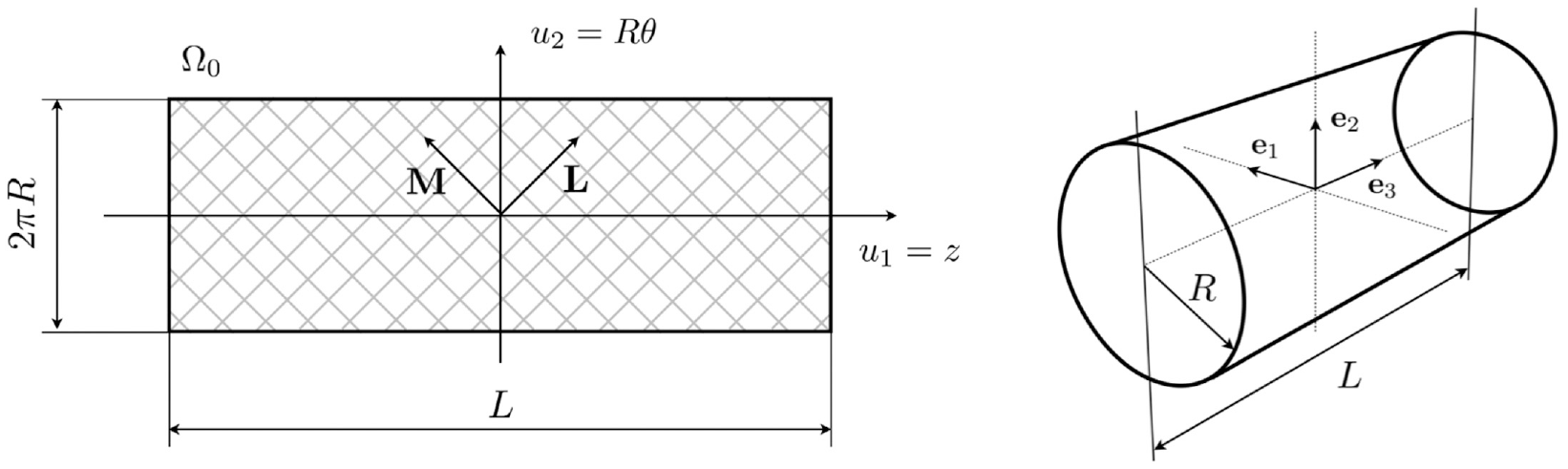
Reference plane with embedded fibers (on the left); reference cylinder (on the right).
In this work, we assume the fibers to be straight on the reference plane and oriented at

The model representing the mechanical behavior of the elastic cylinder is based on the strain-energy density [23,26]

where

Are the areal dilation and the extensional fiber strains, and the components of Lagrange strain

in which
The first term in equation (2) is taken to be [23]

where
The second and third terms in equation (2) account for the fiber stretches and their gradients in the directions of the fibers, and to the normal and geodesic bending of the fibers. The fourth term attributes energy to twist of the fibers as the surface deforms and to the cross-derivatives of the fiber stretches in directions orthogonal to the fibers. The latter derivatives account for the energetic effect of induced stretch along parallel fibers in a small neighborhood of a material point. We refer the interested reader to Giorgio et al. (23,26) for a full discussion of the physical significance of the various terms represented in equation (2).
We seek deformations that map the reference cylinder to a current surface described by

where

is the radial unit vector in the cross-section of the cylinder at azimuth
We impose the periodicity condition

as well as for the normal derivative

We remark that the continuity of
3. Two-dimensional formulation
A straightforward calculation furnishes

and



From these, we obtain the fiber strains

and

and the surface dilation

together with


and

Substitution into equation (1) yields a strain-energy density of the form

or equivalently

representing a particular example of a second-gradient elastic surface.
4. Numerical simulations and results
The energy functional describing the elastic behavior of the cylindrical surface has the structure

In order to find the equilibrium shapes of the surface under study, a weak formulation based on the first variation of equation (22) is implemented. In particular, a finite-element technique based on the first variation

is used. The peculiar nature of the energy requires the use of interpolation functions suitable for a Sobolev space which is at least
In this paper, an alternative approach based on a Hellinger–Reissner variational principle is implemented. The essential idea lies in the introduction of an equivalent energy augmented with a wider set of kinematical fields, which is characterized by first-gradient contributions and a suitable set of Lagrange multipliers [32–35]. The kinematical auxiliary fields newly introduced are vectors denoted by

in which the
A finite-element formulation based on the first variation of equation (24), i.e.

is directly implemented in the commercial code Comsol Multiphysics to simulate the mechanical behavior of the cylinder. Equations (8) and (9) are satisfied in the weak sense via additional Lagrange multipliers

which should be added to equation (24).
To illustrate the mechanical response of the cylinder, we set the length

In a first example, we consider a torsion test where we apply on one base of the cylinder a clockwise angle of
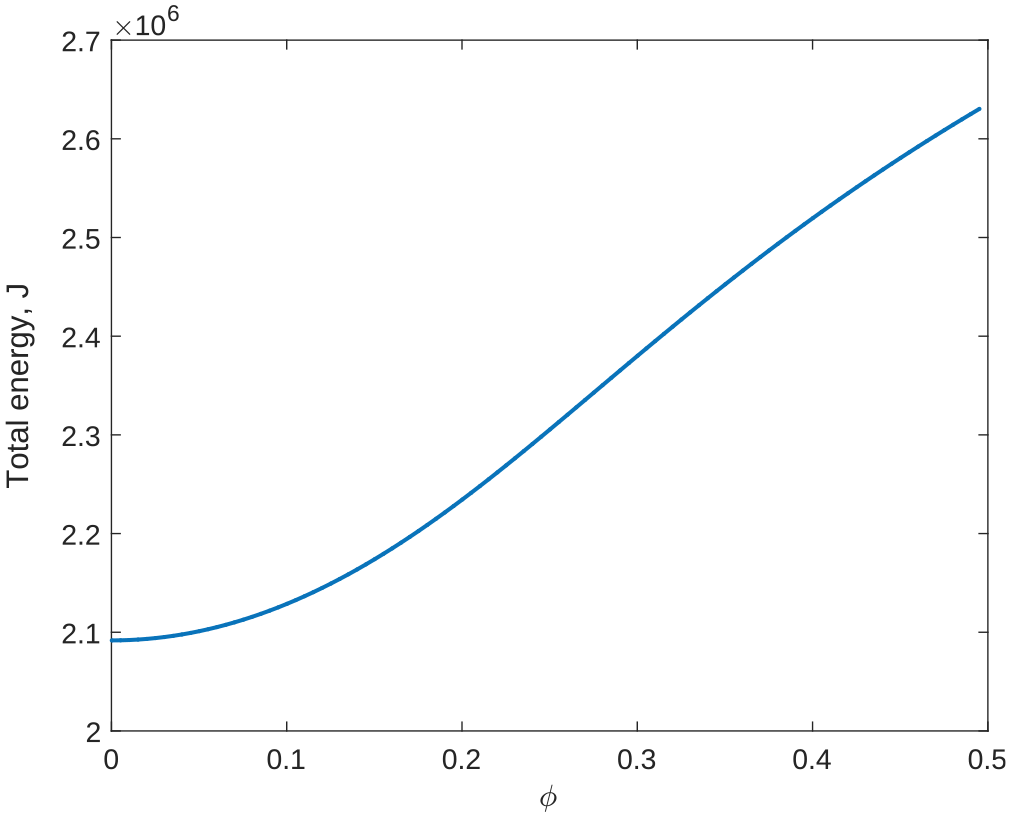
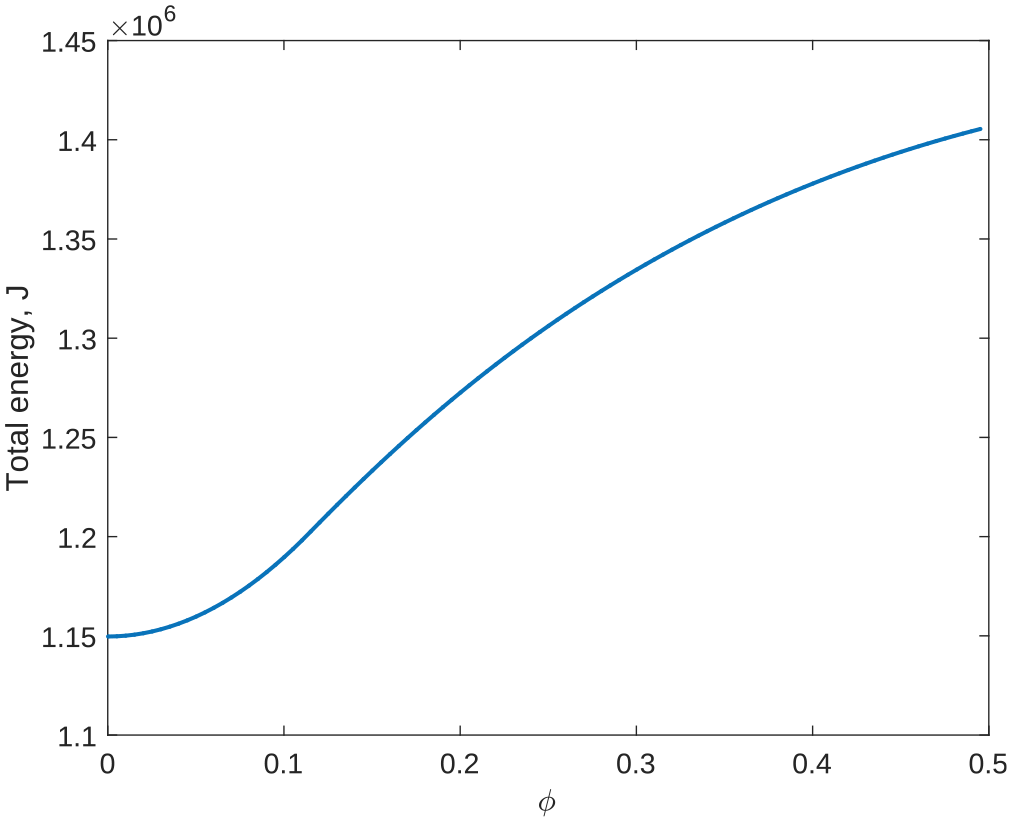
Case 1: total energy vs twisting angle.
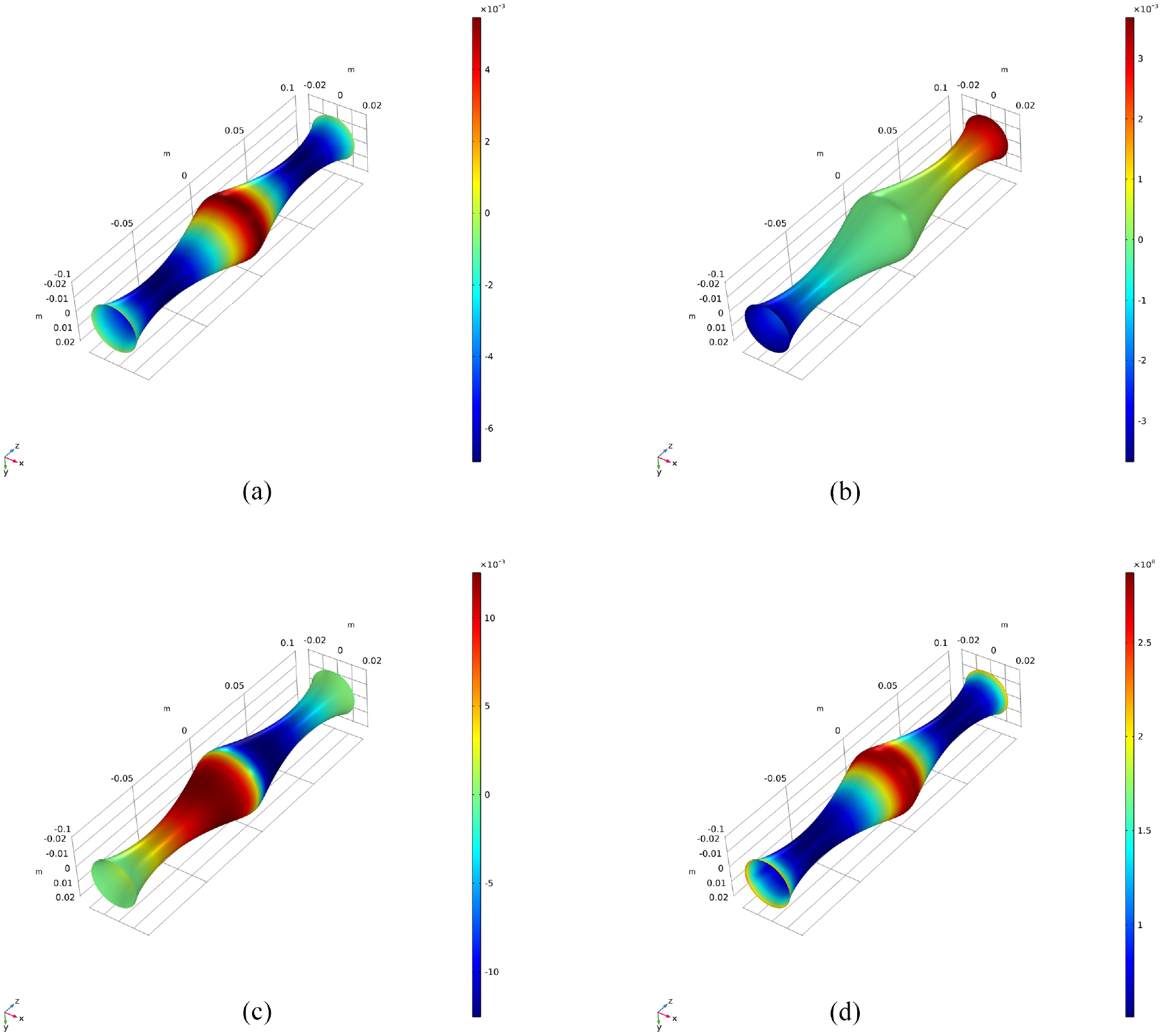
Case 1: equilibrium shape for a twisting angle of about 28°: (a) radial displacement, (b) circumferential displacement, (c) axial displacement, and (d) strain-energy density.
In a second example involving twist, a clamped condition on the two ends of the cylinder is imposed, in which the axial derivative of the radial displacement vanishes, i.e.

In this case, simulations exhibit two possible equilibrium shapes, depicted in Figures 4 and 5. These are not axially symmetric. This behavior is triggered by the increased overall stiffness of the cylinder due to the clamping conditions. The total energy involved in the torsion test is plotted in Figure 6. In this figure, we observe a jump which is related to the transition between the screw-shaped to the eel-shaped equilibrium as depicted in Figure 7.
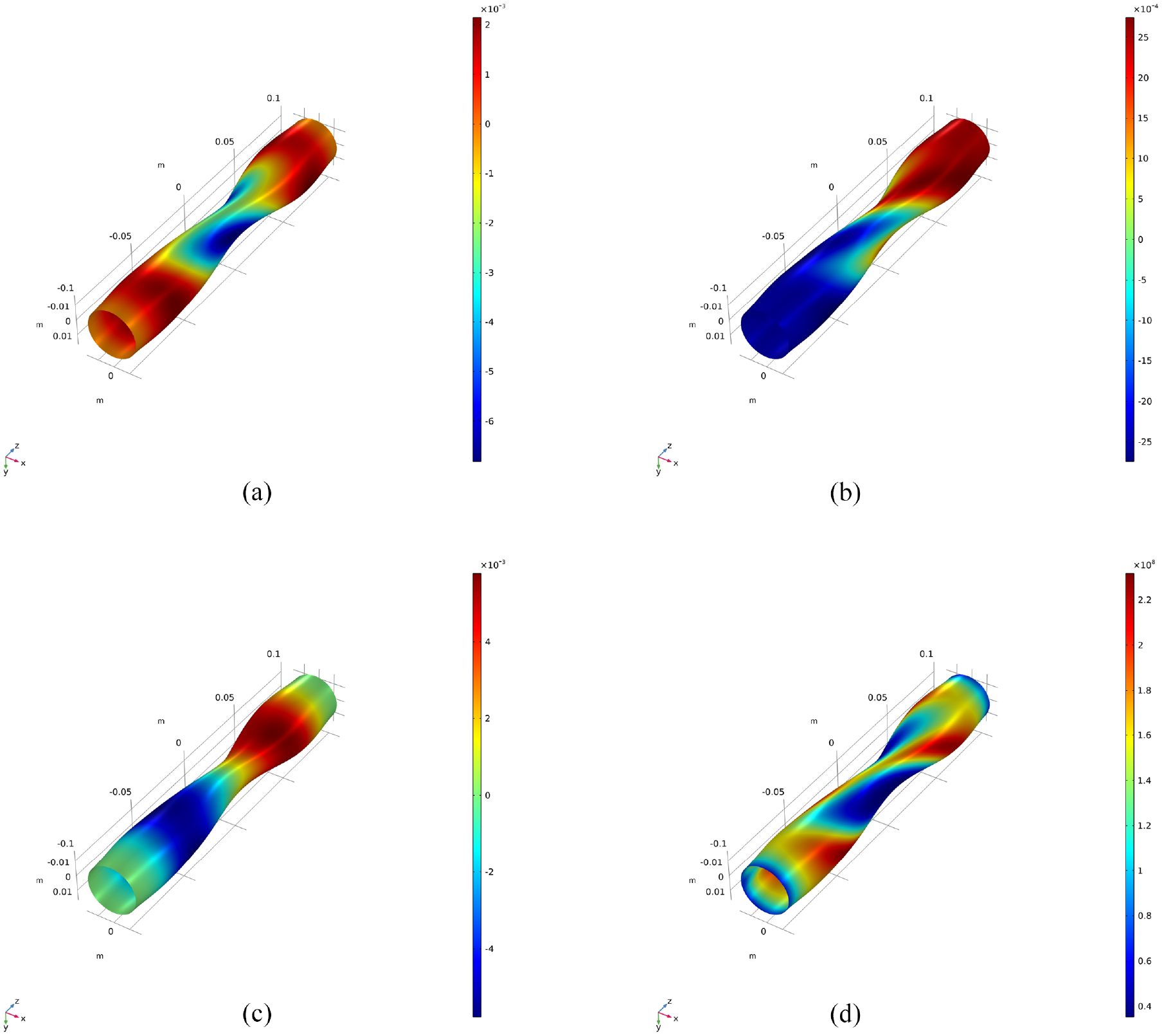
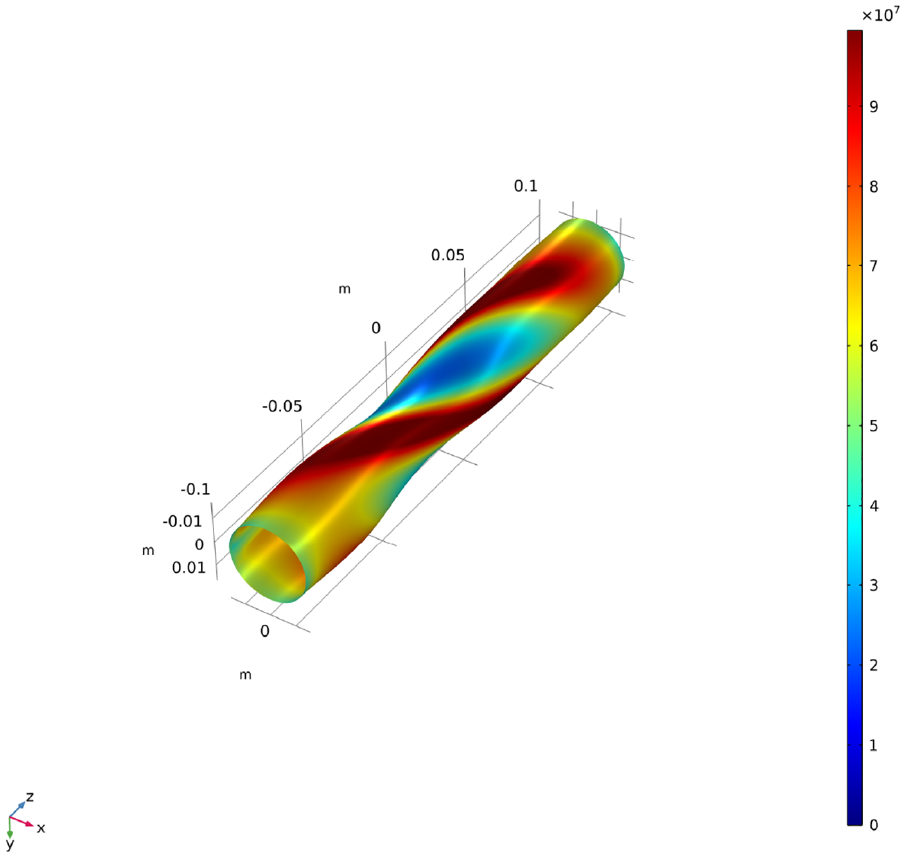
Case 2: screw-shaped equilibrium for a twisting angle of about 21.5°: (a) radial displacement, (b) circumferential displacement, (c) axial displacement, and (d) strain-energy density.
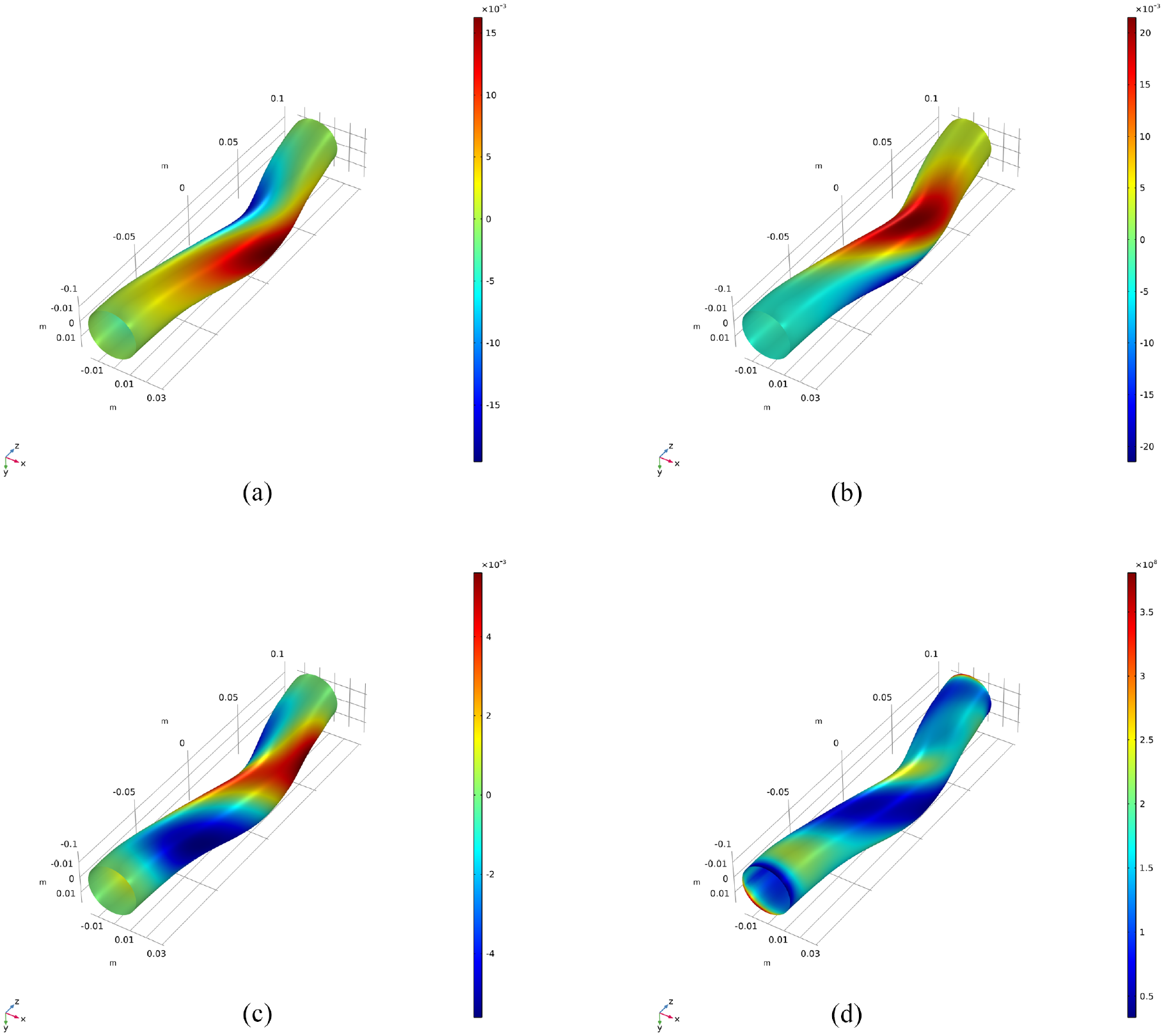
Case 2: eel-shaped equilibrium for a twisting angle of about 28°: (a) radial displacement, (b) circumferential displacement, (c) axial displacement, and (d) strain-energy density.
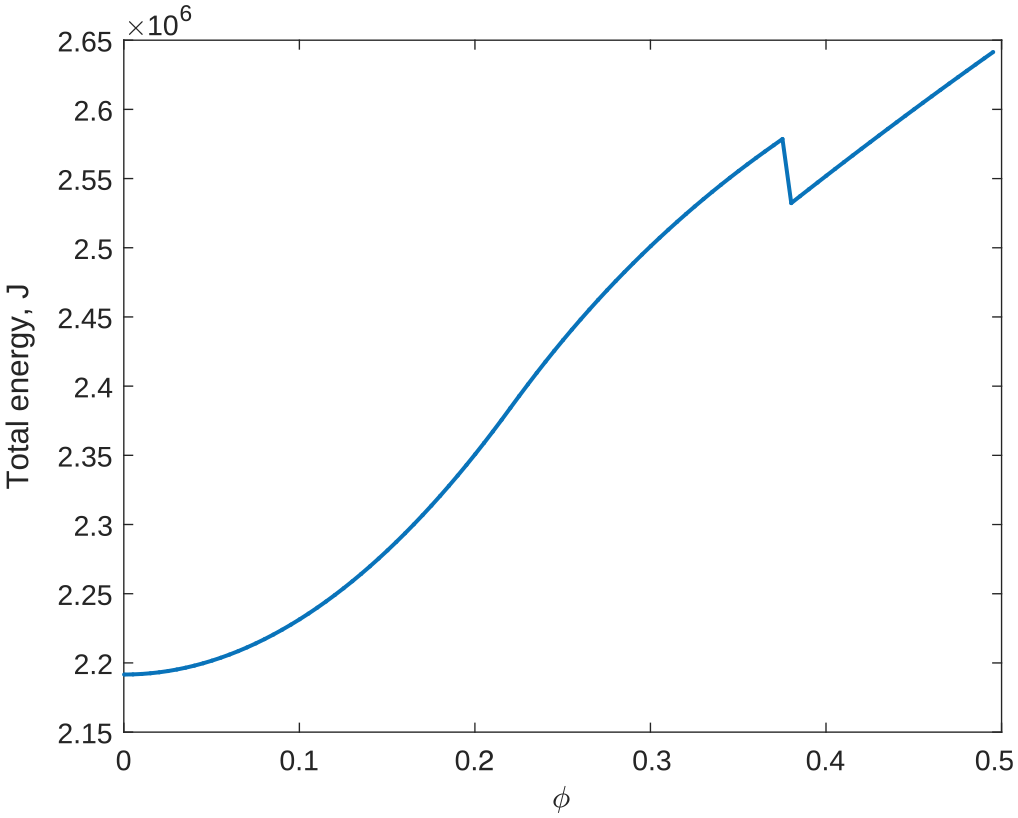
Case 2: total energy vs twisting angle with clamped conditions.
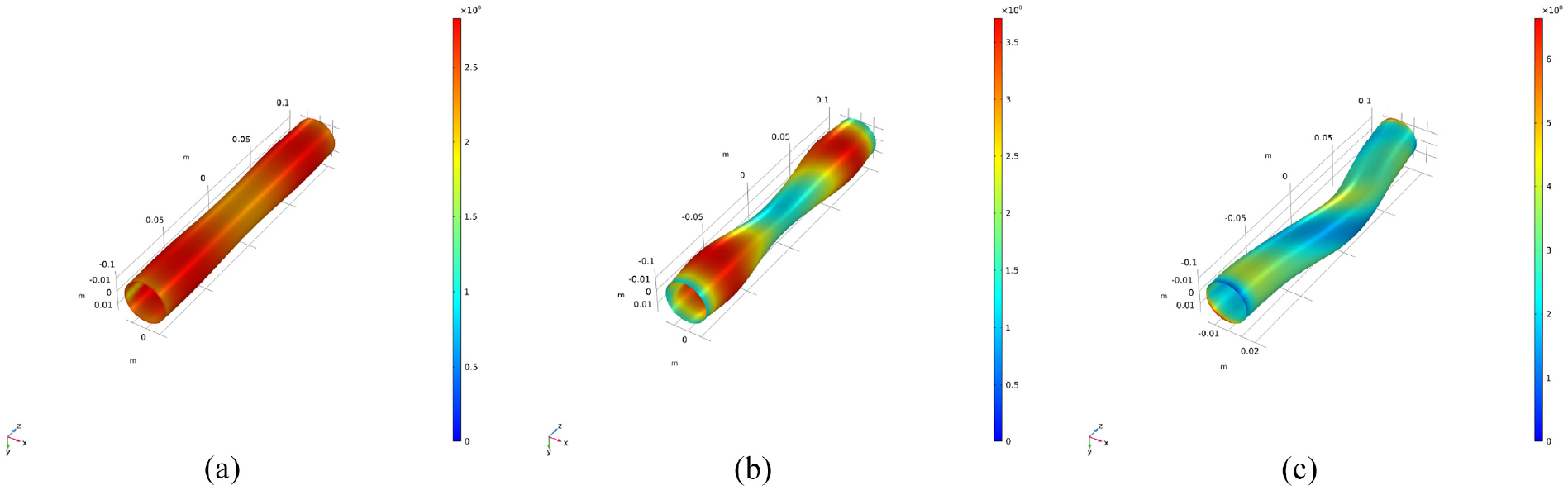
Case 3: equilibrium shapes for the stiffer second-gradient parameters. The colors represent the strain energy: (a) twisting angle of about 21.8°, (b) twisting angle of about 23°, and (c) twisting angle of about 28°.
Finally, we performed two more simulations in which the second-gradient stiffnesses
Increasing the second-gradient stiffnesses results in delaying the appearance of the “screw-shaped” equilibrium state, which remains active for a very small interval of rotation angles from 21.8° to 23°. Before this interval, the shape is axially symmetric with a necking effect in the center; after it, with a sudden jump, the “eel-shaped” equilibrium occurs. These two changes of shape are recognizable also from the total energy plot (Figure 8). The influence of the parameters
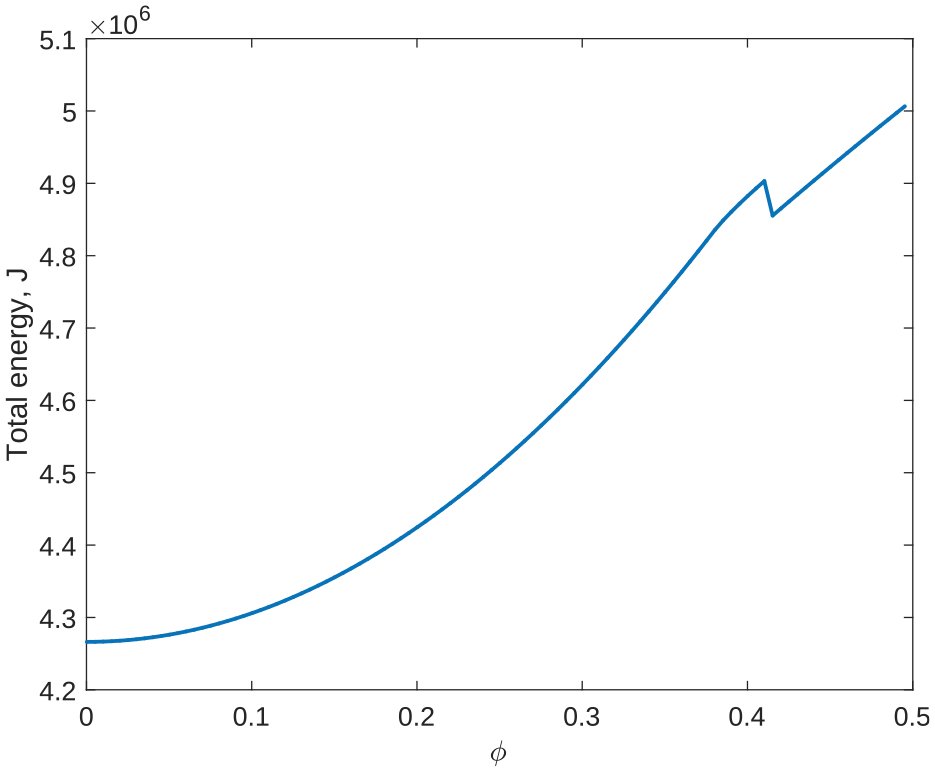
Case 3: total energy vs twisting angle with clamped conditions.
In the case where the second-gradient stiffnesses
Case 4: equilibrium shapes for the softer second-gradient parameters for a twisting angle of about 11.5°. The colors represent the strain energy.
Case 4: total energy vs twisting angle with clamped conditions.
5. Conclusion and research perspectives
Metamaterials having cylindrical reference configuration and capable of large deformations in the elastic regime are of great interest in many applications. Among the many which have been considered, we explicitly mention here those concerning blood vessel stent design [36–38] and the construction of parts in soft robots [39,40]. Future perspectives in our research consist in developing the theoretical and numerical analysis in order to meet the emerging demands of these fields.
In this work, we have extended the results obtained by Giorgio et al. [26], where the particular case of axisymmetric deformations in cylindrical pantographic shells was considered. We expect that it will be possible to produce, using 3D printing technology, specimens of pantographic cylindrical shells and that a two fields displacement model will be needed to describe experimental evidence (see previous works [41,42]).
The simulations presented in this paper reveal that when subjecting cylindrical pantographic sheets to large twist, some highly unusual deformation patterns occur. Further theoretical investigation is necessary to prove that lattice shells of the kind considered do represent useful structural fibrous elements in complex structures aimed at obtaining tailored mechanical behavior.
Footnotes
Acknowledgements
The authors are deeply indebted to Ivan Giorgio for the fruitful and stimulating discussions about the topic of the paper.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: D.J.S. gratefully acknowledges the support of the US National Science Foundation (grant no. CMMI-1931064).
Dedication
To the memory and legacy of A.J.M. Spencer.