This paper is devoted to a study of a new kind of bilateral obstacle problem. The obstacles are made of rigid bodies covered by soft layers which are deformable and allow penetration. A model of an elastic rigid bilateral obstacle problem is established, and three equivalent descriptions are derived: the energy form, the variational inequality form, and the differential equation form. We prove the solution existence and uniqueness of this model and provide an error estimate of the numerical solutions. The optimal order error estimate for the linear finite element method is derived under the proper regularity assumption. A penalty method is introduced to solve the finite element approximation problem, and the convergence results are obtained when the penalty parameter tends to infinity. Several numerical examples are reported, and the results are in good agreement with the theoretical analysis.
The obstacle problem is a typical variational inequality of the first kind, which appears in the fields of physics, financial management science, engineering applications, etc. [1]. This problem has attracted much attention from scholars because of its inherent mathematical theory and wide applications. In the past decades, mathematical theories and numerical analysis of this model have been established extensively and thoroughly. For more details, we recommend the works by Ran and Cheng [1], Bouchlaghem and Mermri [2, 3], Duvaut and Lions [4], Hoppe [5], Imoro [6], Kärkkäinen [7], Kinderlehrer and Stampacchia [8], Kornhuber[9, 10], Murea and Tiba [11, 12], Ran et al. [13], Rodrigues [14], Tarvainen [15], and Yuan and Cheng [16].
In classical obstacle models, the obstacle is perfectly rigid. However, there are no perfectly rigid bodies in practice. Small penetrations could occur, due to the body’s and foundation’s asperities [17]. A new kind of elastic-rigid unilateral obstacle problem is proposed in the work by Cheng et al. [18], in which the obstacle is made of a rigid body covered by a soft layer. Inspired by the work by Cheng et al. [18], we consider a new kind of elastic-rigid bilateral obstacle model. More precisely, the elastic membrane is constrained to lie between two obstacles which are made of rigid bodies covered by layers made of soft material.
The classical bilateral obstacle problem can be described as follows: assume that the elastic membrane (1) is a homogeneous membrane occupying a domain ; (2) lies between a lower obstacle of height and a upper obstacle of height ; (3) is equally stretched in all directions by a uniform tension and loaded by a normal uniformly distributed force [16]. Let be the vertical displacement component of the membrane. According to the principle of minimum energy, the displacement satisfies
where is a feasible set; is a bounded domain with Lipschitz boundary ; and satisfy with and .
It is well known that equation (1) has the equivalent form:
If the solution , the variational inequality (2) also can be transformed to the differential equation form
where
For more details, we refer to the works by Ran et al. [13], Yuan and Cheng [16], and Glowinski [19].
In this paper, we consider the elastic-rigid foundation in the bilateral obstacle problem of the elastic membrane. More precisely, the upper obstacle and the lower obstacle are both made of rigid bodies covered with soft layers. The soft layers are deformable and allow penetration, so the elastic membrane will be subject to the corresponding normal reaction pressure during the penetration process. In section 2, we establish a new elastic-rigid bilateral obstacle model and prove the existence and uniqueness result. We also derive three equivalent forms. In section 3, we consider numerical approximations. The optimal-order error estimate is obtained. In section 4, we give four numerical examples to support our theoretical analysis. Finally, the content of this paper is summarized in the last section.
2. The new bilateral obstacle problem
First, let us introduce the symbols to be used, denotes the Sobolev space with the usual norm, the closure of in , and the dual space of ; the dual pairing between and is denoted by 〈.,.〉. is the norm on the norm space X, and is the inner product on the Hilbert space and simply write (·,·) when there is no confusion. refers to the Laplace operator, and ∇ the gradient operator.
Let , non-negative function and with on . We consider the following problem: under the action of a vertical force , find the equilibrium position of the elastic membrane clamped on the boundary of , and the elastic membrane will be constrained by the bilateral obstacles, with the height of and , respectively. Where the bilateral obstacles are covered by soft layers with thickness of and , respectively, and the soft layers are deformable and allow penetration. Therefore, the elastic membrane will be subject to the reactive normal pressure of the soft layer during the contact process.
The reaction pressure of an elastic membrane subjected to a soft layer is very important. Many normal reaction pressure functions have been defined in many publications. Here, we consider a commonly used function (see, e.g. [20–22]). Define : by
where and the constant are stiffness coefficient. are two constants determined by the specific problem. Obviously, the functions and satisfy:
and
and then we get the normal reactive pressure expressed as follows:
and
In fact, for each point , if , the elastic membrane has the normal reaction pressure as 0. When the penetration of the elastic membrane through the soft layers exceeds and , the soft layers of the obstacles offer no additional resistance to penetration. Using the Riesz’ representation theorem, we define two operators and by the equality:
According to the property of , shown in (6) and (7), it is easy to obtain that and are two monotone Lipschitz continuous operators.
Like the basic assumption and discussion in the work by Rodrigues [14], we can define the total potential energy of the elastic membrane as follows:
Here, and represent the normal reactive pressure when the elastic membrane passes through the soft layers, and
It is easy to verify that is bounded and coercive. In fact, with the Cauchy–Schwarz inequality, there exists a constant
using the Poincaré–Friedrichs inequality, there exists a constant such that
According to the minimum energy principle of mechanics, the elastic membrane is stable at the equilibrium position when the total energy reaches the minimum, i.e.
where is the admissible displacement.
Theorem 1. The problem (11) has a unique solution.
Proof. Since and are continuous and nondecreasing, we can easily get that and are two convex and proper lower semicontinuous functions over [19]. From the expression of , then we can deduce that is lower semicontinuous and strictly convex. Therefore, assuming that is bounded, we immediately get the conclusion according to the Weierstrass theorem in the work by Sofonea and Matei [22]. If is not bounded, since is coercive, it follows that
Then, using Proposition 1.29 in the work by Sofonea and Matei [22] and Riesz’ representation theorem, we know that there exist and such that
Combining (12)–(14) and using Cauchy–Schwarz inequality, we immediately obtain that is coercive. Similarly, according to the Weierstrass theorem in the work by Sofonea and Matei [22], the problem (11) has a unique solution. □
Next, we show that the solution of problem (11) is equivalent to the following variational inequality:
Theorem 2. An element is a solution to problem (11) if and only if it satisfies variational inequality (15).
Proof. If is a solution to problem (11), and let , we have
then according to the definition of , we obtain
Divide the above inequality by and let ; by the differential mean value theorem, we immediately obtain:
Conversely, if satisfies the variational inequality (15), i.e.
Since both and are convex, namely
We have , . Then, by the definition of , for any satisfies:
Therefore, is the solution of problem (11). □
Now we have proved that the problem (11) is equivalent to the variational inequality form (15). Here, we use a similar discussing procedure as in the work by Ciarlet [23]. Assume that all belong to , and , then we get the following result.
Theorem 3. If is the solution of variational inequality (15), then satisfies
where
Conversely, if satisfies (16), then must be a solution of variational inequality (15).
Proof. Assume is the solution of variational inequality (15). For some satisfying , then there exists a neighborhood and a positive number such that
For any satisfying , applying variational inequality (15) with and performing integration by parts yield:
That is,
Then, we further get the following:
Therefore, if , , we have
i.e. must satisfy
For some satisfying , then there exists a neighborhood such that
For any that satisfies , taking in variational inequality (15) and performing integration by parts, we obtain:
Then, we further get the following:
Therefore, if , , we have
i.e.
If , we have . Hence,
Therefore, must satisfy:
For some satisfying , then there exists a neighborhood such that
Then, we choose in variational inequality (15), with satisfying , we have
Performing integration by parts, we also obtain:
Then, we further get:
Therefore,
Similarly, we have when . Therefore,
Then, must satisfy:
Therefore, if the solution of variational inequality (15) under the assumption of , then the complementary form (16) holds.
Conversely, assume that satisfies (16) a.e. in . From the first equation in (16), we can get that
Since and in , we obtain
from the second inequality in (16). Using the third inequality in (16) and in we have
To sum up, we immediately get that
Performing integration by parts yields:
Therefore, is the solution of variational inequality (15). □
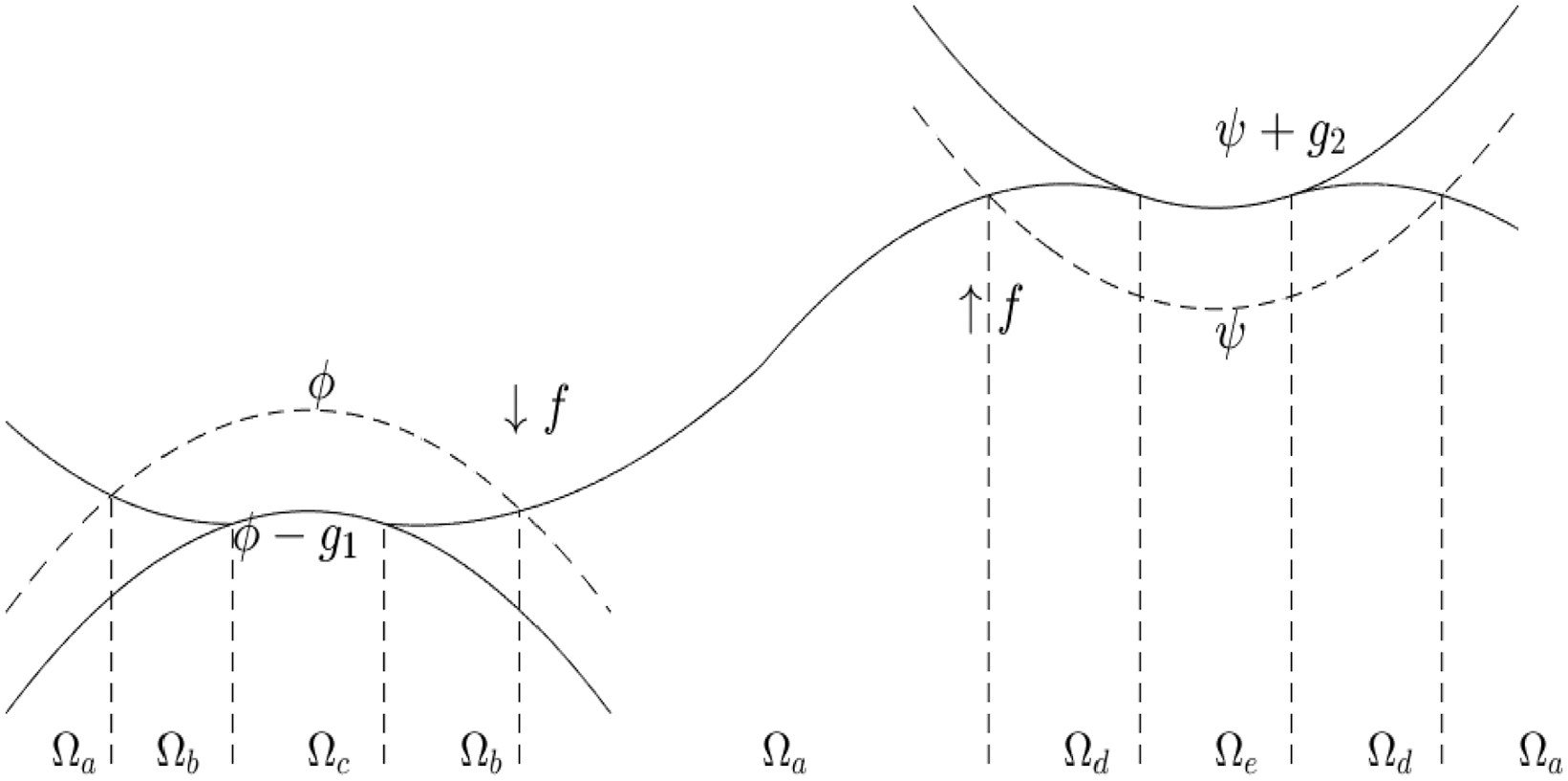
Now we obtain the equivalence of the energy form, the variational inequality form, and the differential equation form of this new bilateral obstacle problem. From (16), we can divide the domain into the following five parts:
Note that indicates that there is no contact between the elastic membrane and the obstacles, and represent the overlapping part of elastic membrane and soft layers, and the elastic membrane does not completely penetrate the soft layers and . and represent the overlapping part of elastic membrane and rigid bodies. In Figure 1, a one-dimensional bilateral obstacle problem is visualized.
One-dimensional bilateral obstacle problem.
Remark 1. The position of , , , and cannot be determined in advance. Therefore, the new bilateral obstacle problem is also a free boundary problem.
Remark 2. Obviously, when , no interpenetration is allowed, this is a classical bilateral obstacle problem. When , and takes infinity, this is a new kind of unilateral obstacle problem.
3. Numerical analysis
In this section, we first consider the finite element discretization numerical schemes for variational inequality (15), and derive the optimal order error estimate. Then, we apply the penalty method to approximate the constraint problem (17) and prove its convergence.
3.1. Optimal order error estimation of finite element approximation
Let us now describe the discretization of problem (15). Let be a “classical” triangulation [19] of with denoting a spatial discretization parameter, and the set of nodes of . We approximate the following finite element space
where denotes the space of polynomials of degree at most one. Evidently, is a finite dimensional subspace of , the admissible set has the following approximation:
Hence, we immediately get the finite element approximation of variational inequality (15): Find such that
Here,
where
and
Now, we assume that and are convex functions so that . And we consider the operator defined by . From the properties of and , it is obvious that is a strongly monotone Lipschitz continuous operator. By standard arguments (see, e.g. [22]), there exists a unique solution to problem (17). The next we derive optimal order error estimate under the assumption of full regularity.
Theorem 4. Let and be the solutions of (15) and (17), respectively. Assuming , then
where the constant depends on .
Proof. From the coercivity and bilinearity of , we have the following:
Applying (15) and ,
Let be arbitrary. Then, according to (17), we obtain:
Bringing the above two inequalities into (18), we obtain:
By equations (8) and (9) and the monotonicity of , , we have the following:
Plugging this into (19) yields
where . Now let us bound each term of (20). Since
and
We obtain:
Since , we have the following:
Therefore,
Combining the above results (21) and (22) with (20), we get that
Hence, the Céa-type inequality is obtained as follows:
Finally, applying standard finite element interpolation theory (see, e.g. [24]), under the assumption of , we obtain:
□
3.2. Convergence results based on penalty method
For convenience, we let and . We use the penalty method to approximate the constraint problem (17) as follows: Find such that
where is a constant and we define , . From the definitions of and , it is easy to know that and are monotonic and Lipschitz continuous. Therefore, according to the Minty–Browder theorem [25], the solution of equation (23) exists and is unique for every . Furthermore, the following convergence theorem is obtained.
Theorem 5. The solution of the penalty form (23) is uniformly bounded with respect to , and when , the solution converges to .
Proof. Take an element from , i.e. . According to (23), we have
Since and is monotonous, we obtain
and since , is monotonous, we have
Thus,
Using the coercivity of , we get that
Therefore, is uniformly bounded in with respect to .
In the finite dimensional space , there is a convergent subsequence converging to some . For the convenience of writing, we always denote that the subsequence is . Let the limit in (24), we have the following:
Now, we are in the position to show . Let and put instead of in (23), we obtain:
Since
and
we obtain
By the boundedness of , we have
let , we obtain
and
Then, we deduce that
and
That is, . Therefore, the limit is the unique solution of problem (17), i.e. the solution converges to as . □
4. Numerical results
We use four numerical examples to support the previous theoretical analysis. All experiments are performed on an Intel Dual-Core personal computer with Matlab version R2019a. For convenience, in all the following examples, we take and , the absolute error as the stop criterion, and as the number of iterations. Without lose of generality, we take the initial penalty parameter and keep updating as the iteration progresses, and we consider that the mesh size is .
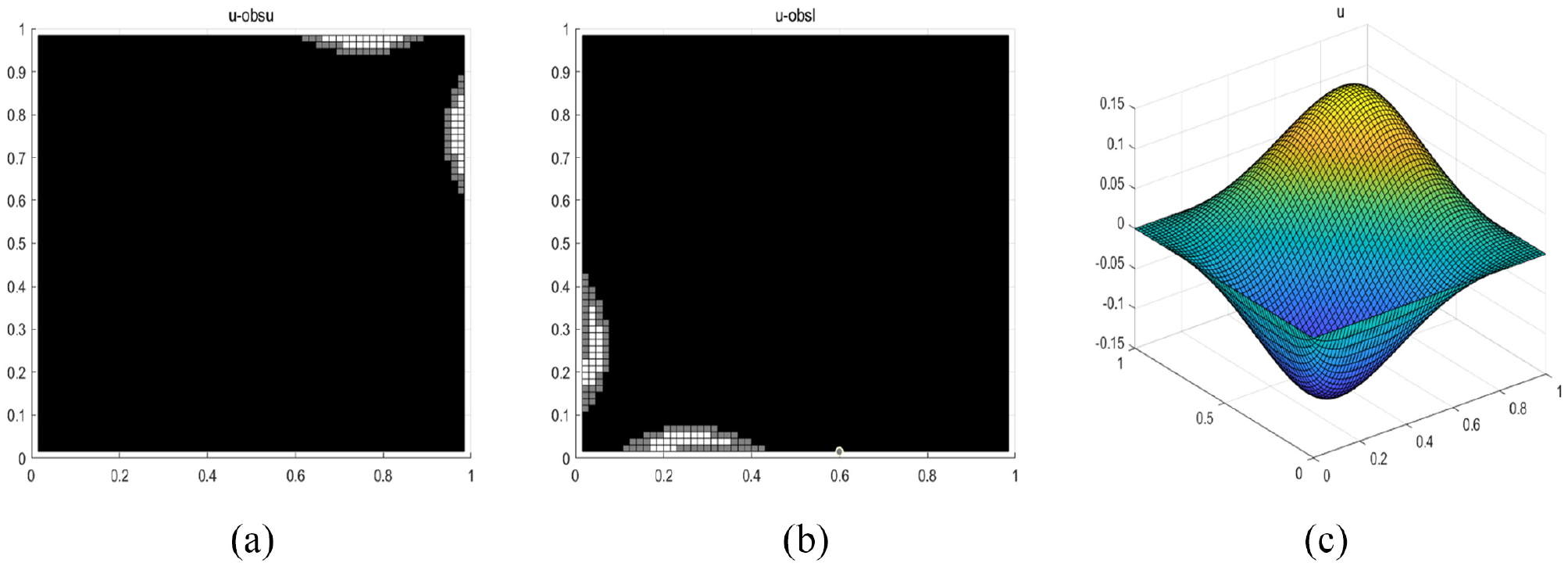
Example 1. We consider this example from the works by Ran and Cheng [1], Murea and Tiba [11], and Cheng et al. [18]. Here, , , , and let . Then, we get the numerical results and iterative data as shown in Figure 2 and Table 1, respectively.
Numerical results of example 1: (a) the upper contact sets, (b) the lower contact sets, and (c) the numerical solution.
Iterative data of each example.
Example 1
Example 2
Example 3
Example 4
n
11
15
14
13
3.0283e–07
4.4840e–07
2.7757e–07
2.4391e–07
5.0000e +06
5.0000e+08
1.5811e +06
5.0000e +07
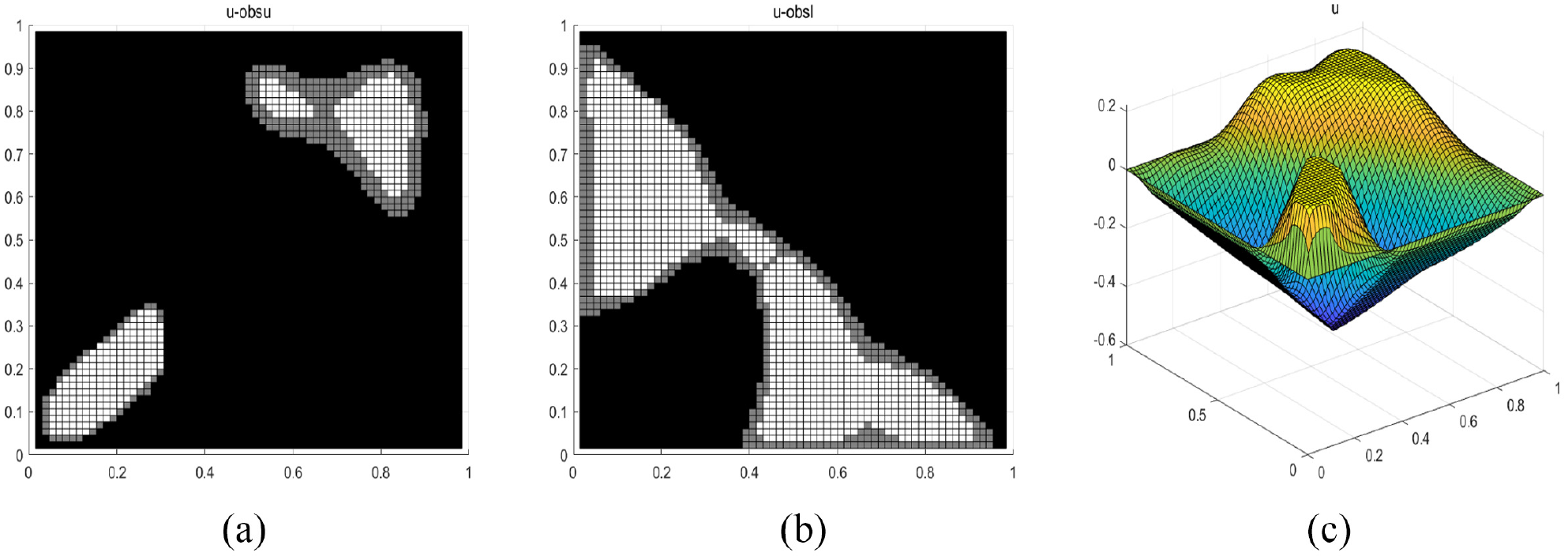
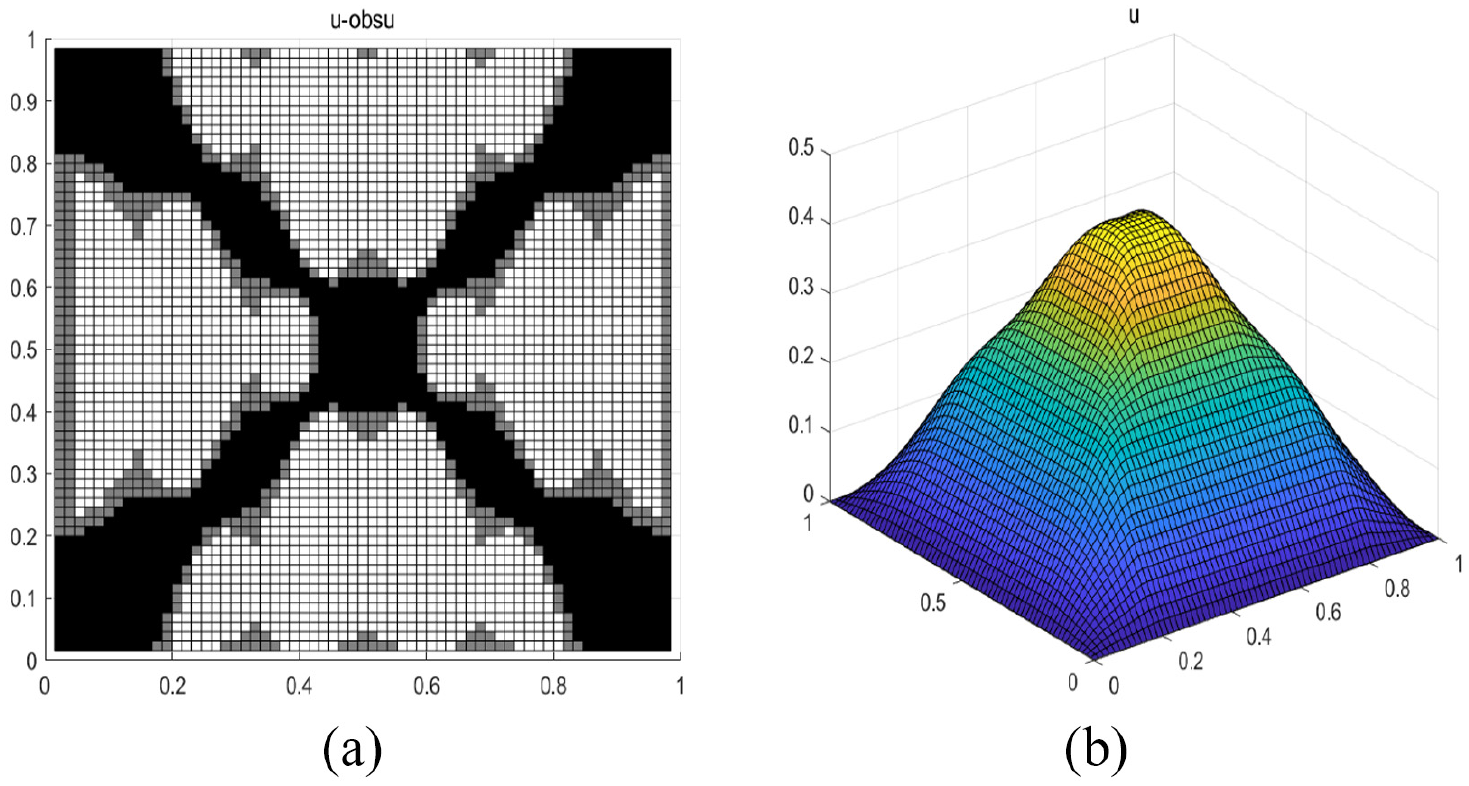
Example 2. We consider a two-dimensional bilateral obstacle problem, which had been reported in the works by Ran and Cheng [1], Kärkkäinen [7] and Cheng et al. [18], i.e. , set and
where
The corresponding numerical results are clearly seen in Figure 3 and Table 1.
Numerical results of example 2: (a) the upper contact sets, (b) the lower contact sets, and (c) the numerical solution.
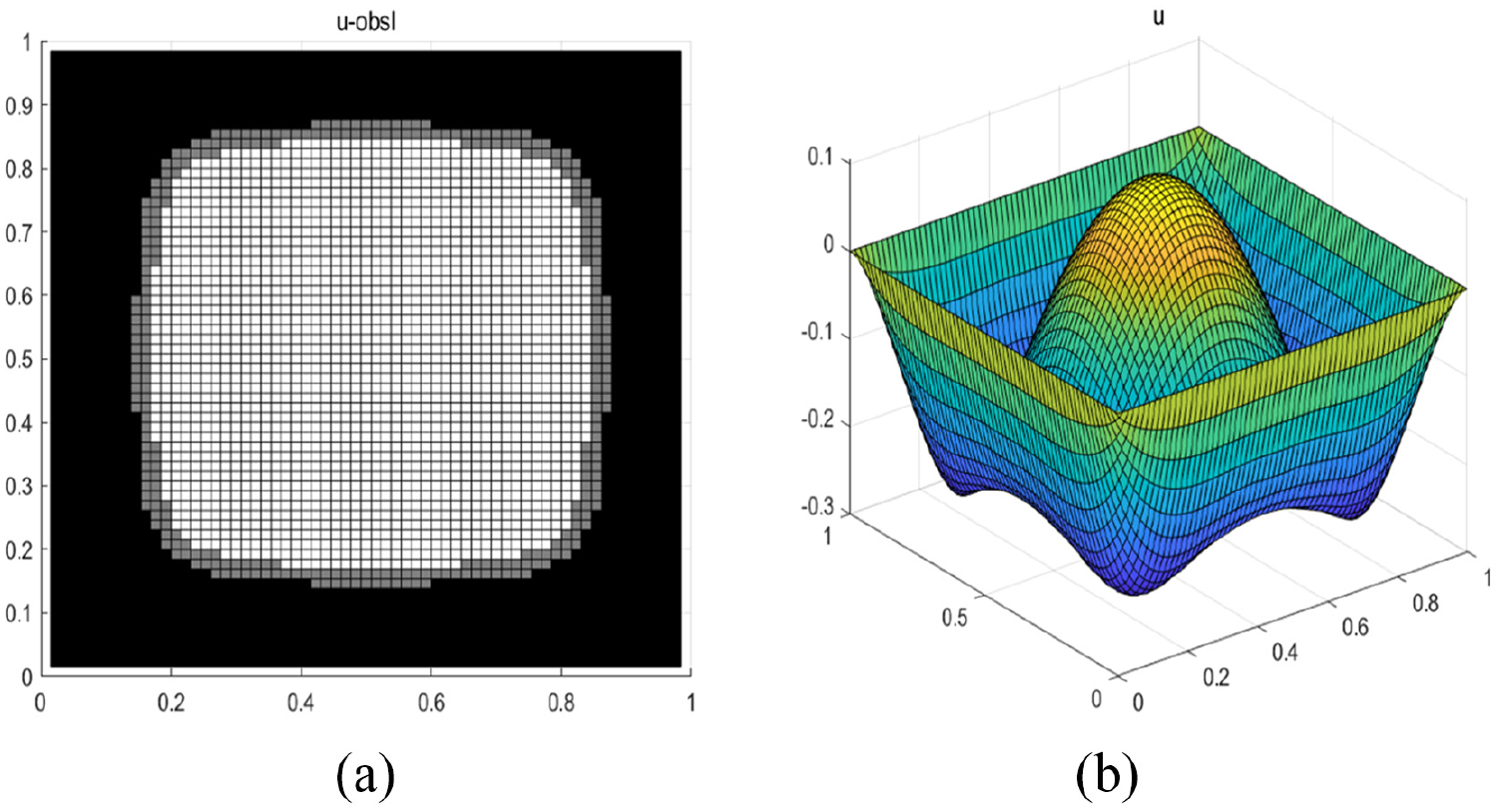
Example 3. The load and obstacle function are and from the works by Imoro [6] and Cheng et al. [18]; set , , and . The corresponding results are shown in Figure 4 and Table 1, respectively.
Numerical results of example 3: (a) the lower contact sets and (b) the numerical solution.
Example 4. Let the obstacle function , and from the works by Ran and Cheng [1] and Kärkkäinen [7]; set , . We show the corresponding numerical results in Figure 5 and Table 1.
Numerical results of example 4: (a) the upper contact sets and (b) the numerical solution.
The numerical results of the above examples are shown in Figures 2–5. In the contact sets, the coincidence part between the elastic membrane and the soft layers are marked in gray, the coincidence region of the elastic membrane and the rigid bodies are marked in white, and black part represents non-coincidence region of the elastic membrane. It should be noted that the elastic membrane in example 3 did not contact the upper obstacle, and the elastic membrane in example 4 did not contact the lower obstacle.
5. Conclusion
In this paper, we studied a new kind of elastic-rigid bilateral obstacle problem. Under certain assumptions, we obtain three forms to describe the problem and prove their equivalence. Based on the variational inequality form, we derived the optimal order error estimate. Moreover, the numerical results showed that the simulation results are in line with the theoretical analysis.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for their valuable comments and suggestions.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by scientific research project of introducing talents of Guizhou University (no. X2022103).
ORCID iD
Qinghua Ran
References
1.
RanQChengX.A new numerical method for solving a bilateral obstacle problem. Appl Math J Chinese Univ Ser A2021; 36(2): 208–216.
2.
BouchlaghemMMermriE.Analysis of a mixed formulation of a bilateral obstacle problem. Appl Math Comput2018; 320: 45–55.
3.
BouchlaghemMMermriE.A Uzawa algorithm with multigrid solver for a bilateral obstacle problem. Appl Math Comput2021; 389: 125553.
4.
DuvautGLionsJ.Inequalities in mechanics and physics (grundlehren der mathematischen wissenschaften). Berlin: Springer, 1976.
5.
HoppeR.Multigrid algorithms for variational inequalities. SIAM J Numer Anal1987; 24(5): 1046–1065.
6.
ImoroB.Discretized obstacle problems with penalties on nested grids. Appl Numer Math2000; 32(1): 21–34.
7.
KärkkäinenTKunischKTarvainenP.Augmented Lagrangian active set methods for obstacle problems. J Optim Theory Appl2003; 119(3): 499–533.
8.
KinderlehrerDStampacchiaG.An introduction to variational inequalities and their applications (classics in applied mathematics, society for industrial and applied mathematics). Philadelphia, PA: SIAM, 2000.
9.
KornhuberR.Monotone multigrid methods for elliptic variational inequalities I. Numer Math1994; 69(2): 167–184.
10.
KornhuberR.Monotone multigrid methods for elliptic variational inequalities II. Numer Math1996; 72(4): 481–499.
11.
MureaCTibaD.A penalization method for the elliptic bilateral obstacle problem. IFIP Adv Inform Commun Tech2014; 443: 189–98.
12.
MureaCTibaD.A direct algorithm in some free boundary problems. J Numer Math2016; 24(4): 253–271.
13.
RanQChengXAbideS.A dynamical method for solving the obstacle problem. Numer Math Theory Methods Appl2020; 13(2): 353–371.
TarvainenP.Numerical algorithms based on characteristic domain decomposition for obstacle problems. Comm Numer Methods Eng1997; 13(10): 793–801.
16.
YuanDChengX.An iterative algorithm based on the piecewise linear system for solving bilateral obstacle problems. Int J Comput Math2012; 89(17): 2374–2384.
17.
HanWSofoneaM.Convergence analysis of penalty based numerical methods for constrained inequality problems. Numer Math2019; 142(4): 917–940.
18.
ChengXRanQWangX, et al. Numerical analysis for a new kind of obstacle problem. Commun Nonlinear Sci Numer Simulat2021; 99: 105810.
19.
GlowinskiR.Numerical methods for nonlinear variational problems (Springer series in computational physics, package array warning: redefining primitive column l on input line 670). Berlin: Springer, 1984.
20.
KlarbringAMikelićAShillorM.On friction problems with normal compliance. Nonlinear Anal1989; 13(8): 935–955.
21.
RochdiMShillorMSofoneaM.Quasistatic viscoelastic contact with normal compliance and friction. J Elasticity1998; 51(2): 105–126.
22.
SofoneaMMateiA.Mathematical models in contact mechanics. Cambridge: Cambridge University Press, 2012.
23.
CiarletPG.Linear and nonlinear functional analysis with applications. Philadelphia, PA: Society for Industrial and Applied Mathematics, 2013.
24.
BrennerSScottL.The mathematical theory of finite element methods (texts in applied mathematics). Berlin: Springer, 2008.
25.
CarlosJReyesD.Numerical PDE-constrained optimization (SpringerBriefs in optimization). Berlin: Springer, 2015.