
Abstract
This paper presents a comprehensive analysis of generalized standard materials (GSMs), with a particular focus on their application to metal plasticity and nonlocal damage models. Building on the foundational work of Halphen and Nguyen, the GSM framework is explored in the contexts of both small strain von Mises plasticity and advanced models for ductile fracture, such as the GLD framework, which incorporates cavity shape effects and nonlocal interactions. The study addresses key challenges, including the numerical stability and convergence of finite element implementations, with simulations of compact tension (CT) specimen fracture tests for two different steels demonstrating the accuracy and predictive capability of the GLD model. In addition, the paper delves into nonlocal damage models, presenting two key theoretical results: the attenuation of high-frequency components, where Gaussian kernels act as low-pass filters, and the connection of nonlocal formulations to a diffusion-like equation. A modified evolution equation with logarithmic terms is proposed to address excessive smoothing, and a sensitivity analysis of the length scale parameter l provides practical guidelines for optimizing nonlocal formulations for realistic damage simulation while maintaining numerical stability.
Keywords
1. Introduction
The formalism of generalized standard materials (GSMs) was first introduced by Halphen and Nguyen [1] in the context of elasto-plasticity. In short, the constitutive equations of GSM are described by the expressions of the elastic energy density (also called reversible elastic potential) and the dissipation potential. The elastic energy density, stored in the material by its deformation under external stimuli, provides by derivation of the Cauchy stress and the thermodynamics forces, while the dissipation potential, gives rise to the evolution equations of the internal state variables. The formalism GSM was developed within the framework of linearized theory and is suitable for rate-independent materials. Although these two restrictions may limit the use of this formalism to describe a vast majority of materials and their behaviors under various external conditions, the success credited to the GSM approach is tremendous in view of the nice local and global stability properties it offers for robust numerical implementations in finite-element subroutines. Of course, for other materials, additional precautions are required to guarantee local and global stabilities of numerical schemes, since the tangent stiffness matrix can become non-invertible during nonlinear analyses.
Initially developed in the context of small strain rate independent elasto-plasticity by Halphen and Nguyen [1] and later on reviewed by Ziegler and Wehrli [2], the GSM formalism was extended to finite strain elasto-plasticity by Hackl [3]. The later extension was proposed as an alternative theoretical framework to overcome the usual problems encountered in the use of classical finite elasto-plasticity models. These problems include arbitrariness in the choice of yield functions and flow rules, difficulty to obtain a clear distinction between the concept of frame indifference and material symmetry which is complicated by the unclear role played by the introduction of the intermediate configuration 1 , and generally non-equivalence between the yield functions obtained in the different configurations introduced by the adoption of a multiplicative decomposition of the deformation gradient, refer Lee [4]. Once developed, the GSM framework has continuously played a key role in the modeling of materials, refer Hackl [3], Fremond [5], Maugin [6] among other authors, and ductile fracture in porous solids, refer Enakoutsa et al. [7]. The application of this formalism to metal plasticity, whether governed by the classical von Mises model or advanced models such as the nonolocal GLD framework for ductile fracture, which incorporates cavity shape effects under the linearized theory assumption, or within the context of J2 plasticity, has been sparsely explored in the literature. The limited attention given to these formulations highlights the need for further investigation into their thermodynamics consistency and numerical implementation. This study aims to rigorously bridge this gap by developing a comprehensive analysis of these models and their implications. In particular, we will analyze the relationship between the GSMs framework and metal plasticity models, focusing on the von Mises yield criterion as a foundational case, and extending the analysis to the more complex GLD model for ductile fracture, incorporating cavity shape effects and nonlocal effects.
Moreover, nonlocal damage models have emerged as robust tools in computational mechanics to address challenges associated with mesh sensitivity in simulations involving material softening and strain localization. These models, characterized by their integral-based formulations, effectively regularize the solution by incorporating spatial interactions over a finite domain governed by a kernel function. While this regularization mitigates numerical pathologies such as spurious mesh dependency, it introduces a new challenge: excessive smoothing of the damage variable. This smoothing, often mathematically analogous to diffusion, can lead to physical inconsistencies, such as delayed crack initiation or overly homogenized damage patterns near critical regions like crack tips.
The theoretical basis for this behavior stems from the attenuation of high-frequency components and the implicit connection to diffusion-like processes. Theoretical results presented in this work establish that the Gaussian kernel used in nonlocal models acts as a low-pass filter, suppressing high-wavenumber contributions exponentially. Furthermore, a connection between nonlocal formulations and diffusion equations is derived, offering insights into the regularization mechanism and its implications for numerical stability and accuracy. This understanding lays the groundwork for developing enhanced nonlocal models that balance regularization with physical fidelity.
To address the limitations of excessive smoothing, modifications to the evolution equation are explored. Specifically, a logarithmic reformulation of the damage variable introduces stability while preserving spatial consistency in damage evolution. A rigorous stability analysis confirms that the modified formulation retains its ability to attenuate high-frequency perturbations while avoiding over-smoothing.
Finally, this paper examines the sensitivity of nonlocal models to the length scale parameter l, which governs the spatial extent of nonlocal interactions. Analytical tools, including the second moment of the kernel, provide a quantitative measure of the kernel’s influence radius and its impact on the diffusive behavior of the model. By exploring the trade-offs introduced by varying l, this work offers practical guidelines for optimizing nonlocal models to achieve realistic damage simulations.
The outline of the paper is as follows.
Section 2 gives an overview of some of the work of Halphen and Nguyen [1] and Nguyen [8] on GSMs.
Section 3 demonstrates how the constitutive relations of the classical small strain the von Mises model with isotropic hardening defines a generalized standard material. In addition, we discuss the benefits of this property on the numerical implementation of von Mises model into a numerical subroutine using the well-known projection algorithm.
Section 4 offers a thorough analysis of the interaction between the GSMs framework and the constitutive equations of the GLD model for ductile fracture, with a particular emphasis on the mathematical formulation of cavity shape effects. In addition, we address the projection problem that arises in the numerical implementation of the model within a finite-element framework. We establish that, under the assumptions of fixed porosity and a constant cavity shape factor, the projection problem results in a unique solution, thereby ensuring numerical stability and convergence. Furthermore, as a practical application of the GLD model, we present simulations of the fracture behavior of a Compact Test specimen subjected to tensile loading. These simulations align closely with experimental data for the 16 MND and SS 315L stainless steels.
Nonlocal damage models are effective in addressing mesh sensitivity in computational mechanics but often suffer from excessive smoothing, similar to a diffusion process, which may result in unrealistic damage distributions. In Section 4, a theoretical analysis demonstrates that Gaussian kernels in these models exponentially attenuate high-frequency components and closely approximate a diffusion-like equation. To address this issue, a modified evolution equation incorporating logarithmic terms is proposed, enhancing stability and maintaining spatial consistency. In addition, sensitivity analysis of the length-scale parameter l offers practical guidelines for optimizing the balance between regularization and physical accuracy in nonlocal formulations.
2. Overview of the formalism of GSM
In this section, we give a brief summary of some aspects of the works of Halphen and Nguyen [1] and Nguyen [8] on GSM. The theory is applicable only in the context of linearized theory.
The constitutive law of a generalized standard material is described by two thermodynamic potentials. The first one is the free energy

The second thermodynamic potential is the dissipation potential

where

This means that the evolution of
Generalized standard materials obey several nice properties. The first one is that the evolution equation (2)2 of
The second property is given as follows. Let quantities at time t be denoted with an upper index 0 and quantities at

with respect to
The third property which is a consequence of the second one, is that of symmetry of the tangent matrix of the global elasto-plastic iterations.
The proofs of the three previous properties were widely discussed by Enakoutsa et al. [7] in the context of ductile fracture of porous solids and are not repeated here.
3. Example 01: von Mises model and the class of GSM
The objective of this section is to demonstrate that the constitutive relations of the von Mises plasticity model with isotropic hardening define a generalized standard material. We begin by recalling the constitutive equations of this model which consist of several elements.
● The first element, the von Mises yield criterion with isotropic hardening, reads

In this equation,

where

where
● The second element is the Prandlt–Reuss flow rule which obeys the “normality rule” and is defined as:

We shall now show that these equations satisfy the required properties to fit in the class of generalized standard materials. To that end, we must first define the state variables and the free energy or the elastic potential of the material, then check that the latter meets the required properties defined in Section 2.
3.1. SGM of the von Mises model
The state of the material is described by the following variables: the components of the total strain

where
With this definition, it is obvious that the free energy ψ is strictly convex with respect to the internal variable
The derivative of ψ with respect to

(by definition of the current yield stress
The next task to complete is to check that the reversibility domain defined by von Mises yield criterion with isotropic hardening in the space of thermodynamic forces (by expressing von Mises yield function as a function of the variables

where the symbol
The last thing to check is that the evolution equations associated to the internal variables

Note that the evolution equation (12)1 is equivalent to the flow rule associated with the yield criterion by the normality property. It suffices, to complete the verification, to check that the evolution equation (12)2 is satisfied. And yet

The relation (12)1 then gives

Taking the magnitude of both sides of equation (13), we get

which is precisely the value of η given by equation (12)2. Hence, the “generalized normality rule” with respect to the global variable
3.2. Implications in terms of numerical implementation of the von Mises Model into a finite-element code
3.2.1. Description of the algorithm
The implementation of the global step may introduce complexities; however, this is not a concern when integrating a new plasticity model into a computational code, as the global step is entirely independent of the discretization (mesh) used. The primary focus should be on the local step, which requires careful attention. Specifically, only the material points (integration points) where the elastic and plastic strain increments, as well as the associated stress and strain tensors, are computed will be considered.
In practice, all Gauss points across the structure are processed sequentially, but this is handled automatically by the software, so there is no need for concern. The emphasis will remain on the local step. Quantities denoted by

where
There are several technical reasons for considering
(Note that if plasticity is involved,
The task is to compute the elastic and plastic strain increments

and the assumption of the additivity of the deformation.
The term
Second, the plastic flow rule will be used, discretized with an implicit scheme (note that

The last equation represents one of the von Mises criteria, evaluated at time

in other words,

The equations for this phase to consider are therefore as follows:

Of course, the previous equations help to better understand the meaning of this section. The algorithm is implicit due to
The elastically computed stresses, denoted as
Let us now solve the system

where
For example, if we were to explicitly write out the time discretization of the flow rule (i.e., using an explicit scheme for the time discretization of the flow rule), we would have

which would have implied

and we would have lost the collinearity of
Taking the von Mises norm of the expression

Using the expression:

we get

which implies that

When

Similarly

which implies

From there we have

From the equation

we deduce the value of
In fact, the preceding analysis only accounts for the scenario where plasticity occurs within the interval
More precisely, this implies that the equivalent stress at
There may be cases where the stress is marginally below the threshold
In such situations, we impose
Thus, it follows that
It is important to note that the algorithm remains agnostic as to whether the material exhibits plastic behavior at time t. Indeed, it only evaluates the von Mises yield criterion at
The algorithm is applied without modification, even if the material is elastic at time t and becomes plastic at time
3.3. Implications on the numerical implementation into a finite-element code
As established in Section 4, the von Mises model characterizes a generalized standard material, incorporating plastic strain as an internal state variable. This formulation guarantees the existence and uniqueness of the solution to the associated projection problem, provided the evolution equations governing plastic strain is temporally discretized using an implicit integration scheme. However, the analysis presented in Section 4 is restricted to the context of a linearized kinematic framework, which can be overly simplistic for plasticity simulations involving large deformations. By extending the approach of Enakoutsa et al. [7], it is possible to remove the limitations imposed by the linearized theory, allowing for the investigation of how large deformation gradients, including both displacements and strains, affect the numerical stability and accuracy of the implementation:
At time step
For large strains and displacements, the classical elasticity law must be replaced by a hypoelastic formulation, utilizing an objective stress rate such as the Jaumann derivative. This objective derivative accounts not only for the conventional material time derivative but also incorporates non-trivial contributions involving the Cauchy stress tensor, the deformation gradient, and the velocity gradient. As demonstrated by Enakoutsa et al. [7], discretizing these additional terms using an explicit time-stepping scheme introduces known quantities that remain fixed throughout each global elasto-plastic iteration. These terms effectively serve as corrective modifications to the elastic stress predictor and do not impact the mathematical properties, such as the existence or uniqueness, of the local projection problem.
3.4. Uniqueness of the return mapping solution
To prove the uniqueness of the solution in the return mapping algorithm, we rely on the following points:
3.4.1. Convexity of the return map
The plastic potential
3.4.2. Monotonicity of the hardening law
The isotropic hardening law
3.4.3. Positive definite tangent modulus
In the Newton–Raphson iterative scheme used to solve the nonlinear system in the return mapping algorithm, the key quantity is the consistent tangent modulus, which governs how the stress and plastic strain are updated at each iteration. For von Mises plasticity, the consistent tangent operator is positive definite, meaning that the Newton–Raphson iterations will always converge to a unique solution.
The consistent tangent modulus is derived from the stress–strain relationship and the plastic flow rule. It takes the form:

where
Since
3.4.4. Existence of the solution
The return mapping algorithm ensures the existence of a solution by construction. The trial stress state is always projected back onto the yield surface in the direction of plastic flow, meaning that a solution always exists for the updated stress and plastic strain at each time increment.
In conclusion, by leveraging the convexity of the yield function, the positive definiteness of the tangent modulus, and the monotonicity of the hardening law, the return mapping algorithm for von Mises plasticity with isotropic hardening is guaranteed to have a unique solution. The iterative process used in the return mapping algorithm converges reliably due to these properties, ensuring that the stress and plastic strain are updated in a well-posed and physically consistent manner at each time step.
4. Example 02: GLD model and the class of GSM
4.1. Governing equations of the GLD model
In the model proposed by Gologanu et al. [9], the cavities are assumed to be ellipsoidal and axisymmetric, and aligned in the third direction of the cartesian system of coordinates (
Just like the majority of classical plasticity models in large deformation, the GLD model introduces an assumption of additive decomposition of the Eulerian strain rate into elastic and plastic parts,
4.1.1. Yield criterion
The yield criterion is given by the relation

where

(the unit vector
‖·‖ is the von Mises magnitude symbol given by

(we shall adopt in the subsequent simplified notation

C, η, K, g are the GLPD model parameters that depend on the porosity f and the shape factor of the cavities S; their expressions can be found by Gologanu et al. [9] and are not repeated here;
the stress

where
finally, q is the Tvergaard [10] parameter.
4.1.2. Evolution equations of the internal variables
The evolution equation for the porosity, calculated from the approximate incompressibility (the elasticity being neglected) assumption of the sane matrix material, is given by

with
The rate of the shape factor of the cavities is defined as

where

The variable

where

following an earlier suggestion of Gurson. Finally, the rate of change of the vector

where
4.1.3. Flow rule
The plastic part of the additive decomposition of the deformation, deduced from the normality property, is obtained as

where Φ denotes the GLP yield function (see equation (17)) and λ is the plastic multiplier. We shall now derive the explicit expressions of the plastic flow rule, equation (28). To that end, we begin by calculating the derivative
Assuming that the Greek indices take only the values 1 and 2 and accounting for the following relations


and

we obtain

We can then compute the mean part of the plastic deformation rate

Also, combining the relations (28), (33), and (34), we get

In the subsequent, let assume that

(Note that

Thus, the tensors

with

(

adding this result to equation (34) yields

To summarize, the explicit equation of the flow rule is given by the relations
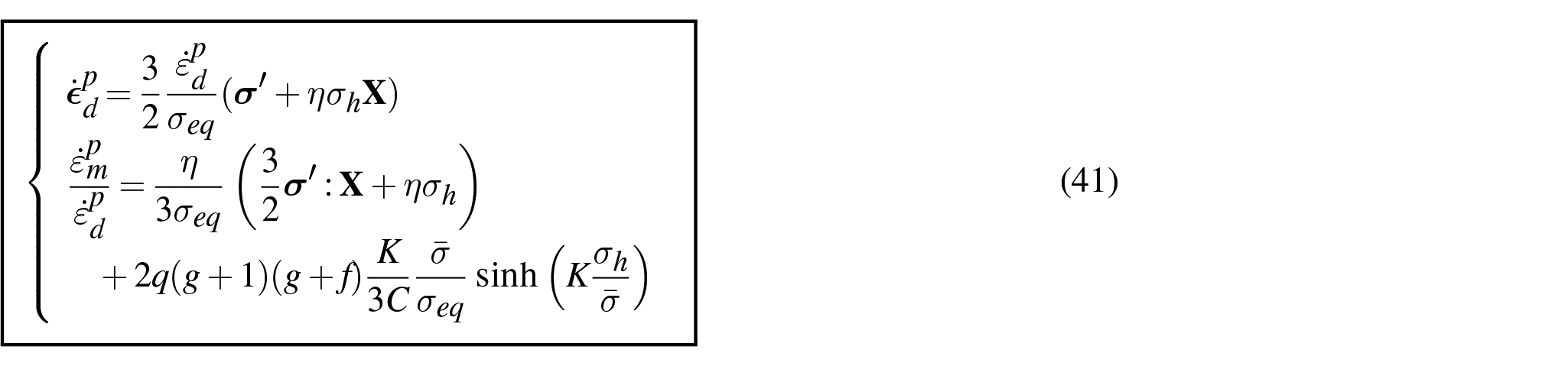
Note that in the case of a spherical cavity,

which corresponds to the theoretical equation of the flow rule for the Gurson model, see Gurson [11]. Remarkably,
4.1.4. Parameterization of the yield surface
The numerical implementation of the GLD model requires solving the complex problem of projection of the elastic stress predictor onto the yield surface. One key point of the procedure of solution of the projection problem, aimed at reducing the number of unknowns, lies in a suitable parametrization of the yield locus defined by the yield function (17). This parametrization is inspired by the classical one for an ellipse and obtained by looking for the maximum possible value of the quantity

Assuming that

we obtain

where ϕ represents some angle with positive cosine. Hence, equation (17) yields

Solving equation (46) for the parameter

The sign of ϕ is introduced into equation (47) to allow for negative as well as positive values of

4.1.5. Nonlocal damage model based on the GLD model
The nonlocal damage model based on the Gologanu–Leblond–Devaux (GLD) model extends the classical [11] model by incorporating void shape evolution, which captures how voids elongate or flatten during plastic deformation, and a nonlocal treatment of damage, significantly improving the accuracy of simulations in ductile fracture, where the shape and distribution of voids play a critical role in material behavior.
Nonlocal approach
In traditional local damage models, damage evolution is computed at a specific material point based on local stress and strain states. However, a nonlocal damage model introduces spatial averaging, so the damage at any point also depends on the behavior of surrounding material points. This approach resolves issues like mesh sensitivity and unrealistic localization of damage.
Convolution of the evolution equation of the damage
The nonlocal aspect is introduced using a convolution operator, which spreads the effect of damage over a spatial domain. This convolution integrates the damage variable over neighboring points, ensuring that damage evolution considers both local and surrounding states. The mathematical representation of the convolution is given by:

where
Mathematical formulation
The nonlocal GLD model replaces the local damage variable with a nonlocal one, introducing spatial averaging via the convolution operation. The mathematical form of the nonlocal damage variable is given by:

where:
Ω is the domain over which the convolution is computed.
The kernel function
4.2. Excessive smoothing of the damage variable: theoretical results
Nonlocal damage models, particularly those employing integral formulations, are known for their ability to mitigate mesh sensitivity in numerical simulations. However, these models often exhibit excessive smoothing, which is mathematically analogous to a diffusion process. This section formulates and proves two theorems that characterize the diffusive behavior of such models, providing a rigorous mathematical foundation for understanding their effects. The first theorem establishes exponential attenuation of high-frequency components, while the second connects the nonlocal model to a diffusion-like equation. These insights are crucial for improving the design of nonlocal formulations to balance numerical stability and physical accuracy.
4.2.1. Attenuation of high-frequency components

with a Gaussian kernel

where

2. The term

3. The exponential attenuation implies that:

4. Therefore, high-frequency components (short-wavelength features) are exponentially suppressed, while low-frequency components remain relatively unaffected.
This completes the proof. □
4.2.2. Diffusion approximation of nonlocal damage

with a Gaussian kernel

where the term

for small p (long-wavelength components).
2. Substituting this into the Fourier-transformed equation for ϕ:

3. Taking the inverse Fourier transform:

4. The correction term
5. Therefore, the nonlocal model can be interpreted as a diffusive system where the Gaussian kernel introduces smoothing effects analogous to a diffusion process.
This completes the proof. □
4.3. Modified nonlocal evolution equation
4.3.1. Stability analysis of the modified nonlocal evolution equation
The excessive smoothing of damage in nonlocal models has long been a challenge in the numerical simulation of material behavior. This phenomenon, often attributed to the diffusive nature of the integral-type evolution equations, can lead to unrealistic results, such as delayed crack initiation and homogenized damage distributions near crack tips. To address this, a modified nonlocal evolution equation was proposed by Enakoutsa et al. [7], Enakoutsa [12], incorporating the logarithm of the damage variable. This section aims to rigorously analyze the stability of this revised formulation under small perturbations.
Mathematical formulation
The modified nonlocal evolution equation is given by:

where

This formulation ensures that the damage evolution remains consistent across the domain while mitigating excessive smoothing.
Linearization
Let the damage variable

where

Substituting this into equation (49), we obtain the perturbation equation:

where
4.3.2. Fourier transform analysis
Applying the Fourier transform with respect to the spatial variable x:

where

Growth rate analysis
Rewriting the perturbation growth rate:

For non-trivial solutions, stability requires

This analysis demonstrates that the modified nonlocal evolution equation avoids the excessive smoothing observed in the original formulation. The Gaussian kernel ensures that short-wavelength perturbations decay faster than long-wavelength ones, maintaining a realistic damage distribution.
Sensitivity Analysis of Length Scales in Nonlocal Damage Models Nonlocal damage models have gained prominence in computational mechanics due to their ability to address mesh sensitivity in simulations involving softening and localization phenomena. Central to these models is the length scale parameter l, which governs the extent of nonlocal interactions. While increasing l enhances regularization, it may also result in excessive smoothing, delaying the onset of localization and altering physical interpretations. This section investigates the impact of l on the model’s behavior, introducing a rigorous framework based on the second moment of the kernel to quantify the kernel’s spatial influence.
4.4. Effective smoothing radius and the second moment of a Kernel
The effective smoothing radius,

This definition includes:
The second moment provides a rigorous and natural measure of the kernel’s spatial influence.
4.4.1. Application to the Gaussian Kernel
For the Gaussian kernel:

we compute
(a) Denominator: Total Volume
The total volume of the Gaussian kernel is:

(b) Numerator: Weighted Squared Distance
The numerator is:

where d is the spatial dimensionality.
(c) Effective Radius
The effective smoothing radius is:

In one-dimensional space (

4.4.2. Sensitivity to Length Scale l
Critical length scale
A critical length scale

yielding:

Impact on damage evolution
The length scale l also influences the diffusive correction term:

As l increases, the term
A quick illustration
Consider a one-dimensional damage profile:

The nonlocal damage profile

These results show that as l increases:
The damage profile broadens,
Peak damage values decrease,
Smoothing becomes more pronounced.
The effective smoothing radius
4.5. The GLD model and the class of generalized standard materials
In this section, we aim to examine the generalized standard nature of the GLP model under the assumption of small deformations. It should be noted that the formalism of generalized standard materials only applies under this assumption.
The examination demonstrates that, at a fixed porosity, the constitutive equations of the GLD model possess the required properties to ensure the model’s classification within the GSM class.
In the following section, we will explore the implications of this property concerning the numerical implementation of the model.
It is important to immediately note that this property applies equally to both the original local version of the model and its non-local modified version presented in Section 4, as fixing the porosity disregards its evolution equation, which is the only differing point between the two versions.
The presentation begins with a very brief general overview of some aspects of the work by Halphen and Nguyen [1], and Son [13] on the Generalized Strain Gradient (GSM). It continues by providing a simple example of MSG before delving into the main result of this section: the generalized standard nature of the GLP model when the porosity, the orientation, and the shape factor components in the model are assumed to be discretized with an explicit numerical scheme.
To begin with, it is necessary to define the state variables and the expression for the free energy, and then ensure that the latter satisfies the required properties (see Appendix 1).
The state of the material is described by the following state variables: the components of total deformation ε and a set of internal variables including the components of plastic deformation
We then propose the following free energy potential, which is the sum of elastic deformation energy and ”locked” hardening energy:

In this equation,
It is easy to see, with this definition, that the free energy ψ is strictly convex with respect to the internal variable ε, as the quadratic form defined by
Moreover, the derivative of ψ with respect to ε is equal to

The second thing to do is to demonstrate that the reversibility domain defined by GLD criterion in the space of thermodynamic forces (expressing GLD’s charge function Φ in terms of the variables
The transformation from the variables (

is convex.
This would result immediately from the convexity of GLD’s charge function Φ with respect to the global internal variable (
The second element consists of checking that the evolution equations of the internal variables

The two previous elements of this proof were extensively discussed by Enakoutsa et al. [7] in the context of the Gurson’s [11] model, and for this reason will not be repeated here.
All the necessary conditions for the GLD model with fixed porosity and the shape factor of the cavities to define a generalized standard material are thus satisfied.
The essential point here is that the evolution equation of the hardening parameter
4.5.1. Implications in terms of numerical implementation of the GLD model: numerical algorithm
Projection onto the yield surface
The key challenge in the numerical implementation of an elastoplastic model lies in accurately projecting onto the yield surface. Specifically, the task is as follows: given the outcome of a ”large elastoplastic iteration” (where elastic deformation is solved over the entire structure, considering initial plastic strains), which yields the total strain increment
In the following, quantities without indices refer to their values at time
Let us begin by defining a parametrization of the original Gurson criterion using an angle ϕ, following the approach of the original model. This ensures automatic satisfaction of the criterion. The flow rules will then provide an equation for ϕ, which can be solved numerically.
To find this parametrization, let us look for the maximum value of

It is therefore natural to assume that

where φ is some angle with positive cosine. We get from equation (17)


We introduce

which gives, from the definition equation (18) of the tensor

In addition, from equation (36),

Let us now write the flow rule in discretized form.

(which is the discretized equivalent form of equation (64), we get:

where

Note that these equations correspond to an implicit algorithm with respect to all parameters except the porosity f. The symbol

The explicit character of the algorithm with respect to f (parameter governing softening) ensures its convergence, taking

Assume


Contracting this equation with the tensor

we get

thus, adding
where

Let us go back now to equation (71) by adding

In addition, by equation (71) we have

thus, by reporting in the previous equation, we get

Taking the von Mises norm

Finally, using the flow rule equation (68) together with equations (72, 73, 75) we obtain

Let us observe that
These equations can be solved numerically by Newton’s method: the quantity
Evolution equations for the internal parameters
The first internal parameter we consider is the porosity f. Using an implicit algorithm for this parameter leads to significant convergence difficulties that are often challenging to resolve. Consequently, we employ an explicit algorithm in which f—as shown in equations (61) and (62)—does not represent the actual porosity value at time

(f is therefore fixed throughout the passage from the instant t to instant
Of course, after convergence of the large elastic plastic iterations from t to

The (approximate) value
The second internal parameter is the shape factor S, also unknown “a priori”. To determine it, we adopt an iterative algorithm of a ”fixed point” type. The law of evolution of this parameter is the discretized equivalent of equation (23)

We recall that h is an independent parameter, besides f and S, of the triaxiality T defined by equation (24). It is therefore necessary to calculate, in addition to
This equation allows to evaluate
The third internal parameter is the hardening parameter

Its use requires the calculation of
thus, the evolution equation of equation (83) of

where all the quantities on the right side of the equation are known quantities.
The fourth internal parameter is the vector

where
4.6. Discretization of the convolution integral of the evolution equation of the damage
In this section, we describe the numerical implementation of the convolution integral used in the nonlocal damage model based on the Gologanu-Leblond-Devaux (GLD) model. The inclusion of nonlocal effects ensures that damage evolution is influenced by the surrounding material, thus preventing mesh dependency and enhancing the accuracy of ductile fracture simulations. The core of the nonlocal formulation is the convolution integral, which we discretize and implement in a finite element code. Below, we outline the key steps involved in this numerical procedure.
4.6.1. Governing convolution equation
In the nonlocal damage model, the nonlocal damage variable

where
4.6.2. Discretization of the convolution integral
To implement this convolution in a finite element framework, we discretize the integral over the finite element mesh. Given that the domain Ω is divided into elements, the convolution at a point

where
4.6.3. Choice of weighting function
The choice of the weighting function

This kernel ensures that points closer to
4.6.4. Efficient neighbor search
In the finite element mesh, computing the convolution at every node requires identifying neighboring nodes within the characteristic length l. To optimize this process, we employ a nearest neighbor search algorithm, such as a k-d tree, to efficiently locate the neighboring points for each node. This reduces the computational cost by avoiding the need to evaluate the convolution over the entire mesh.
4.6.5. Quadrature for finite elements
To achieve higher accuracy in the finite element method, we use Gauss integration points within each element to compute the convolution. For each integration point

where
4.6.6. Handling boundary conditions
Special care must be taken when implementing the convolution near the domain boundaries, as points near the boundary may not have sufficient neighboring points within the interaction radius l. To address this, we adopt a reflection technique, whereby points near the boundary are ”mirrored” across the boundary to provide additional neighbors. Alternatively, the weighting function can be modified near the boundaries to account for the missing contributions from outside the domain.
4.6.7. Algorithm for the numerical convolution
The overall algorithm for the numerical implementation of the convolution can be summarized as follows:
– Build the finite-element mesh. – For each node or integration point
– For each node or integration point – Compute the nonlocal damage
– Update the material stiffness matrix and force vector to account for the effects of nonlocal damage.

The numerical implementation of the convolution integral for the nonlocal damage model enhances the predictive capabilities of ductile fracture simulations by accounting for the spatial distribution of damage. By discretizing the convolution, selecting an appropriate weighting function, and employing efficient neighbor search and parallelization techniques, we achieve a robust and scalable implementation that can be integrated into existing finite element codes. This formulation helps mitigate mesh dependency and provides more accurate results, especially in the context of complex loading conditions and material behavior. A stability analysis of the numerical scheme proposed for the discretization of the nonlocal damage variable is given in Appendix 4.
4.7. Advantages of using the GSM framework
Generalized Standard Materials, as formulated by Halphen and Nguyen [1], and [13] in the context of infinitesimal strain theory, constitute a broad class of elastic-plastic solids. In these materials, both the plastic strain tensor and the set of internal state variables evolve according to an “extended normality rule,” a generalization of the classical normality condition in plasticity. This class is remarkable for several key reasons. One of the most significant results, demonstrated by Halphen and Nguyen [1], is that for the GSM, the local elastoplastic update problem at a material point—spanning a time increment
It must be rigorously underscored that, although the convexity of the local projection problem ensures existence and uniqueness at the level of a single integration point, this property is restricted to the return-mapping algorithm and addresses only a discretized aspect of the global boundary-value problem (BVP). Specifically, this result does not extend to the global solution of the BVP, where issues of the existence and uniqueness remain fundamentally unresolved, particularly in the presence of material softening. Softening models, such as those investigated in the present study, induce strain localization phenomena that are intrinsically linked to a loss of ellipticity in the underlying system of partial differential equations. This breakdown in ellipticity typically manifests as ill-posedness of the global BVP, leading to non-existence or non-uniqueness of the solution, as well as pathological mesh sensitivity in numerical simulations. Consequently, the mathematical guarantees derived from the local projection problem are insufficient to ensure the well-posedness of the global problem, where additional factors such as regularization techniques or nonlocal formulations may be required to mitigate these effects.
Enakoutsa et al. [7] and Enakoutsa [12] rigorously established that Gurson [11] model can be embedded within the class of Generalized Standard Materials (GSM), contingent upon two specific conditions: (1) the analysis is carried out within the linearized regime, corresponding to the assumption of small strains and small displacements and (2) the internal state variables are limited to the plastic strain tensor components,
The representation of strain hardening effects through a single scalar parameter,
the normality property of the plastic flow rule
the evolution equation of the hardening parameter
Given that the GLD model presented here exhibits the same structural properties, it can be concluded that it belongs to the class of Generalized Standard Materials (GSM), subject to the same constraints as Gurson [11] model. Specifically, this classification holds under two key assumptions: (1) the model operates within the linearized framework (infinitesimal strains and displacements) and (2) the internal state variables are limited to the plastic strain,
To fully exploit the beneficial properties of GSMs, particularly the guarantees of existence and uniqueness associated with the local projection problem, it is imperative to relax the two aforementioned constraints. This adjustment will facilitate a more comprehensive characterization of the material response and enable the application of advanced computational methods that align with the principles of GSM theory.
In the context of large displacements and strains, their impact on the numerical implementation within an Eulerian framework (as employed in this study) can be distilled into two critical aspects: (1) the equilibrium equations must be formulated in the context of the updated configuration at time
The first consideration mandates that at the commencement of each global elastoplastic iteration, the computational domain must be reconfigured to reflect the displacement field associated with the configuration at time
The second consideration necessitates the incorporation of the Jaumann derivative of the stress tensor
In consideration of the variations in f and S, we assume that the projection problem is formulated utilizing an explicit numerical scheme that is predicated on the parameter values at time t. As a result, these parameters are effectively fixed throughout the entirety of the solution procedure at each integration point. This methodology renders the projection algorithm analogous to a case where f and S are treated as temporally invariant. The existence and uniqueness of the solution are guaranteed by the inherent properties of GSM, contingent upon the employment of an implicit scheme for the evolution of the internal state variables
In conclusion, to exploit the guarantees of existence and Halphen and Nguyen [1] , and Son [13] for the solution to the local projection problem—albeit not to the global problem—articulated by within the theoretical framework of GSMs, it is essential to satisfy three foundational conditions in the formulation of the solution algorithm:
In the hypo-elasticity formulation, discretize the supplementary terms arising from the Jaumann stress derivative by employing the stress tensor
In the framework of the projection problem, employ an explicit numerical scheme for the discretization of the parameters f and S, ensuring that their values are consistently evaluated at each iteration of the algorithm.
in the same problem, use an implicit scheme with respect to the parameters
The GSM framework ensures that the model is thermodynamically consistent, meaning that: (1) the free energy is well-defined and convex with respect to the internal variables (e.g., strain and damage), (2) the evolution laws for damage (or other internal variables) are derived from a potential, ensuring irreversibility and non-negative dissipation.
This consistency simplifies the numerical algorithms by providing a clear framework for how internal variables evolve and interact with the stresses and strains. For instance: (1) damage evolution will always be incremental and irreversible, so you won’t need to implement checks to prevent damage reduction, (2) the use of potentials provides a systematic way to derive consistent incremental evolution equations for the internal variables.
Numerical schemes for solving the GLD model, particularly for damage evolution, can benefit from implicit time integration schemes because:
The evolution of internal variables like damage tends to be stiff, meaning damage can evolve very rapidly under certain conditions. Explicit schemes may require very small time steps to remain stable.
Implicit schemes are more robust and can handle larger time steps without compromising stability, especially when the dissipation potential ensures a thermodynamically admissible solution.
In implicit integration, the internal variables are updated at each time step by solving a system of nonlinear equations (often using Newton-Raphson methods). This can be efficiently handled because the convexity of the dissipation potential and the free energy guarantees the stability and convergence of the numerical solution.
In finite-element implementations, when solving for stresses and strains, you need the algorithmic tangent modulus (or consistent tangent operator) for faster convergence of the nonlinear solver (such as Newton-Raphson). For GSM models, including the GLD model, the tangent modulus is derived from the free energy and the evolution for the damage.
The consistent tangent modulus accounts for both the elastic behavior and the influence of damage, ensuring that the finite element solution converges efficiently. This is particularly important in nonlinear problems where damage evolution significantly alters the stiffness of the material.
One numerical challenge in the GLD model arises from the fact that local damage models (like the original Gurson model) can lead to mesh dependency and localization of damage, resulting in non-physical results (e.g., spurious mesh sensitivity). This is because the damage evolution may localize into a single element, which reduces the convergence of the solution. we mitigate this issue, you adopt the following strategy:
Implement nonlocal damage models or gradient-enhanced damage models, which introduces a length scale into the damage variable to spread the damage over a region, improving numerical robustness.
Alternatively, we could use regularization techniques that introduce additional terms in the free energy to avoid mesh dependence.
4.8. Numerical applications of the GLD nonlocal model
4.8.1. Application 1: simulation of a 2D compact tension (CTJ 25) specimen
In this section, the accuracy of the numerical implementation is assessed by replicating the fracture test performed by Devaux and Mottet [14]. The test utilized a CTJ 25 compact tension specimen fabricated from 16 MND 5 stainless steel, subjected to loading under plane strain conditions. The specimen’s nominal dimensions are 50 mm in width, 50 mm in height, and 25 mm in thickness. A rectangular notch with a width of 2 mm is machined into the top surface, transitioning near the root into a triangular configuration with an apex angle of 60°. In addition, a fatigue pre-crack, measuring 1.34 mm in length and propagating from the notch root, was introduced prior to testing, though it is not depicted in the figure.
Plane strain conditions were maintained due to the relatively large thickness of the specimen compared to its in-plane dimensions, constraining the deformation in the thickness direction and ensuring that the out-of-plane strain components are negligible. This constraint leads to a higher triaxial stress state at the crack tip, which is critical for accurately assessing the material’s fracture behavior and validating the numerical model’s predictive performance.
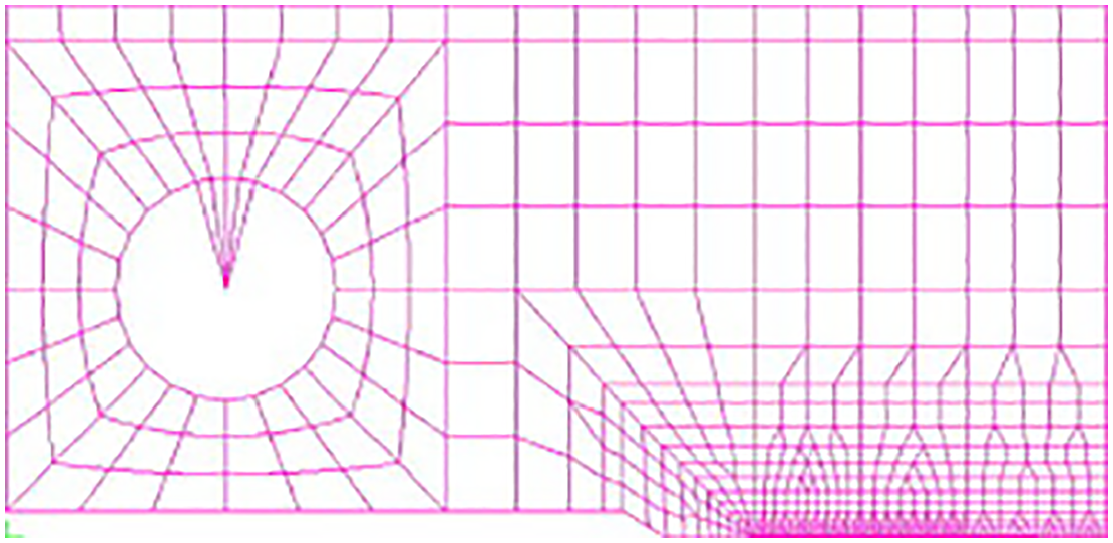
The discretized geometry of the specimen is depicted in Figure 1. To reduce computational complexity, the symmetry of the specimen about its vertical mid-plane is leveraged, allowing for a simulation of only the right half of the geometry. The triangular elements in the mesh represent a wedge idealized as an elastic continuum with equivalent isotropic elastic properties matching those of the 16 MND 5 steel. The center of the wedge corresponds to the centroid of the circular hole machined into the CT specimen. Boundary conditions are imposed by applying a controlled vertical displacement at the centroid of the wedge, simulating the load transfer mechanism and ensuring consistency with the experimental setup. This approach maintains the fidelity of the stress-strain response while optimizing computational resources.
In this study, a single 2D finite-element mesh is adopted, as a rigorous mesh sensitivity analysis was previously conducted in the numerical simulations of TA pre-cracked specimens, as reported by Enakoutsa et al. [7], Enakoutsa [12]. These earlier studies confirmed that the selected mesh density ensures sufficient spatial resolution for accurately capturing the localized stress and strain gradients near the crack tip, while maintaining computational efficiency. As a result, further mesh refinement or sensitivity analysis was deemed unnecessary for the present investigation, given the convergence and robustness demonstrated in prior work.
The figure presents the fine mesh configuration utilized in the computational analysis of the CTJ 25 pre-cracked specimen, which is critical for accurately capturing stress distribution and crack propagation. A refined mesh in finite element modeling enhances the simulation’s fidelity, particularly in areas with high stress gradients around the crack tip. This detailed mesh allows for precise calculations of the material’s mechanical response, facilitating a better understanding of how crack geometry and loading conditions affect fracture behavior. Ultimately, this careful meshing improves the accuracy of simulation results and aids in validating the modeling approach against experimental data.
In the experimental setup, the inclusion of lateral central triangular notches and the defined opening angle ensured that the region of crack propagation experienced near plane strain conditions, enabling a 2D numerical analysis. However, the assumption of ideal plane strain conditions is an approximation. To accurately correlate the simulation with the experimental results, the experimentally applied force must be normalized by an ”equivalent thickness” of the specimen, which accounts for deviations from the actual thickness in capturing the three-dimensional stress state. This correction has been rigorously investigated by Brosse [15], who determined an optimal equivalent thickness of 10.3 mm based on a detailed analysis of the stress distribution. This value is employed in the present study to enhance the fidelity of the simulation results. The material properties and constitutive parameters utilized in the model are listed in Table 2 in the Appendix 2. The hardening law is given as in the Figure 2. The elastic response is not explicitly represented, as its contribution is negligible and does not significantly influence the overall mechanical behavior of the material. The initial porosity value (
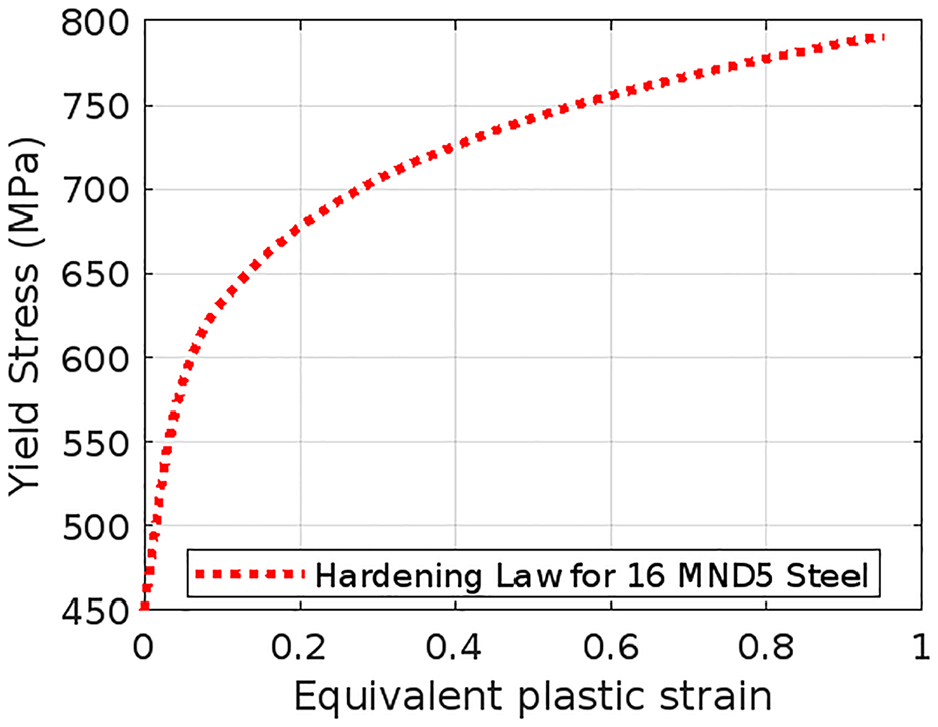
Hardening Law of the 16 MND 5 Stainless Steel used in the Simulations, Brosse [15]. This figure illustrates the relationship between the plastic strain and the corresponding stress for the 16 MND 5 stainless steel. The data, derived from experimental measurements, highlights the material’s strain-hardening behavior, which is critical for accurately simulating deformation and fracture processes. The curve serves as the basis for calibrating the numerical model used in the study.
Figure 3 illustrates the experimental load–displacement curve (depicted by red points) in conjunction with the numerical results obtained via both kinematic and isotropic hardening formulations. The simulations reveal that the inclusion of kinematic hardening (results not presented here) yields negligible deviations from the isotropic hardening results, attributed to the uniaxial tension loading conditions employed in the numerical analysis. In addition, the initial iteration of the nonlocal damage model demonstrates excessive smoothing of the porosity distribution in the ligament region ahead of the crack tip, culminating in a significant and abrupt decrease in the load-displacement response (green curve). This anomaly can be rectified by implementing the natural logarithm in the porosity evolution equation, as depicted in Figure 3. However, the disparity between the numerical predictions derived from the modified nonlocal Gurson model (incorporating isotropic hardening) and the actual experimental data is markedly pronounced, necessitating urgent intervention. This discrepancy can be effectively minimized through meticulous calibration of the parameters
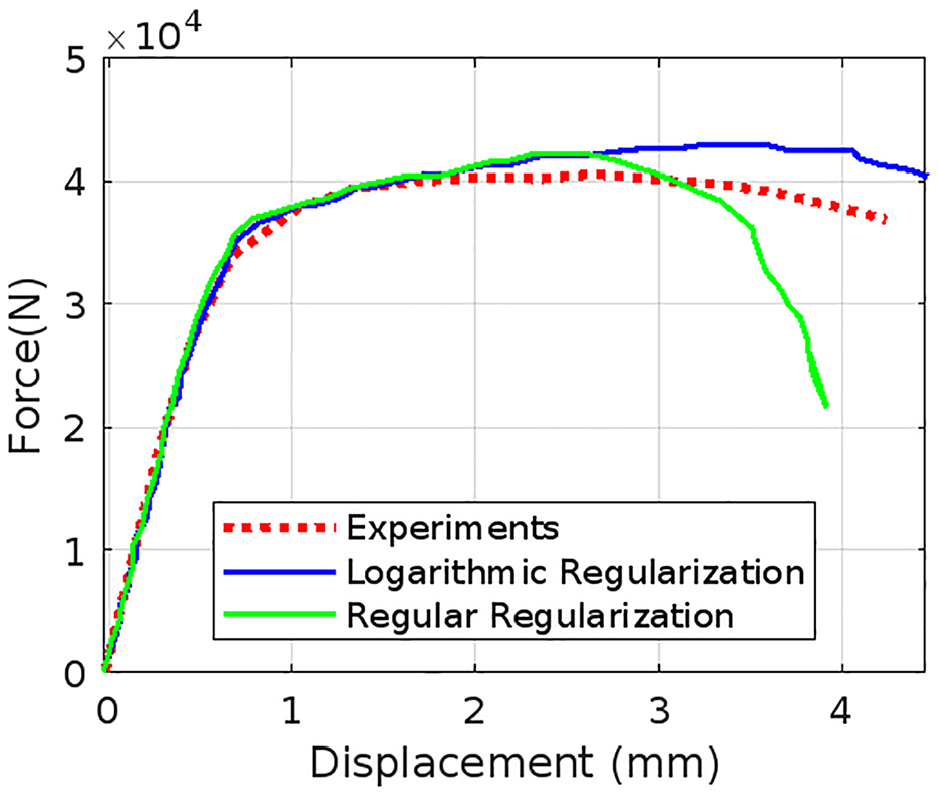
A comprehensive comparison between the experimental and computed load–displacement curves for the CT specimen made of 16 MND 5 steel is presented for the cases of regular and logarithmic nonlocal regularizations. The experimental load–displacement data, derived from carefully conducted mechanical tests, provide crucial insights into the material’s behavior under applied loading conditions, including its resistance to crack initiation and propagation. These experimental results serve as a benchmark for evaluating the accuracy of the computational model used to simulate the material’s performance. The computed curves, generated through numerical simulations, are compared to the experimental data to assess the model’s predictive capability. This comparison not only highlights the model’s ability to replicate the observed load-bearing response but also helps identify any discrepancies, which may point to limitations in the current model or areas where additional refinement or parameter adjustments are necessary. By juxtaposing the experimental and computed results, this analysis provides a deeper understanding of the material’s mechanical behavior and offers a pathway for improving simulation techniques, ultimately enhancing the accuracy of future predictions for 16 MND 5 steel in various engineering applications.
4.8.2. Application 2: simulation of a 2D compact tension (CT12) specimen
As a second demonstration, we present a 2D simulation of Marie’s [17] fracture test on a CT12 specimen composed of SS 316L stainless steel, where CT 12 designates a specimen with a thickness of 12 mm. Figure 4 illustrates the discretized geometry, utilizing symmetry along the vertical mid-plane of the specimen to simplify modeling to only the right half, optimizing computational efficiency without compromising accuracy. The specimen dimensions are 25 mm in both width and height, with a 12 mm thickness.
The specimen features a carefully designed notch, 2 mm wide and extending to a depth of 85 mm from the top surface. This notch has a unique profile: it is rectangular near the surface but transitions into a triangular form with a sharp 60° opening angle at the root, simulating high-stress concentration areas. From the base of this notch, a 1.34 mm fatigue pre-crack propagates, further enhancing the focus on fracture mechanics under controlled initiation conditions.
Discretized geometry of the CT12 specimen used in the 2D fracture test simulation. The model leverages symmetry along the vertical mid-plane to reduce computational complexity by simulating only the right half of the specimen. Key features include the rectangular-to-triangular notch profile with a 60° opening angle at the root, designed to create a controlled stress concentration. This setup allows for a detailed study of crack initiation and propagation under simulated fracture conditions in SS 316L stainless steel.
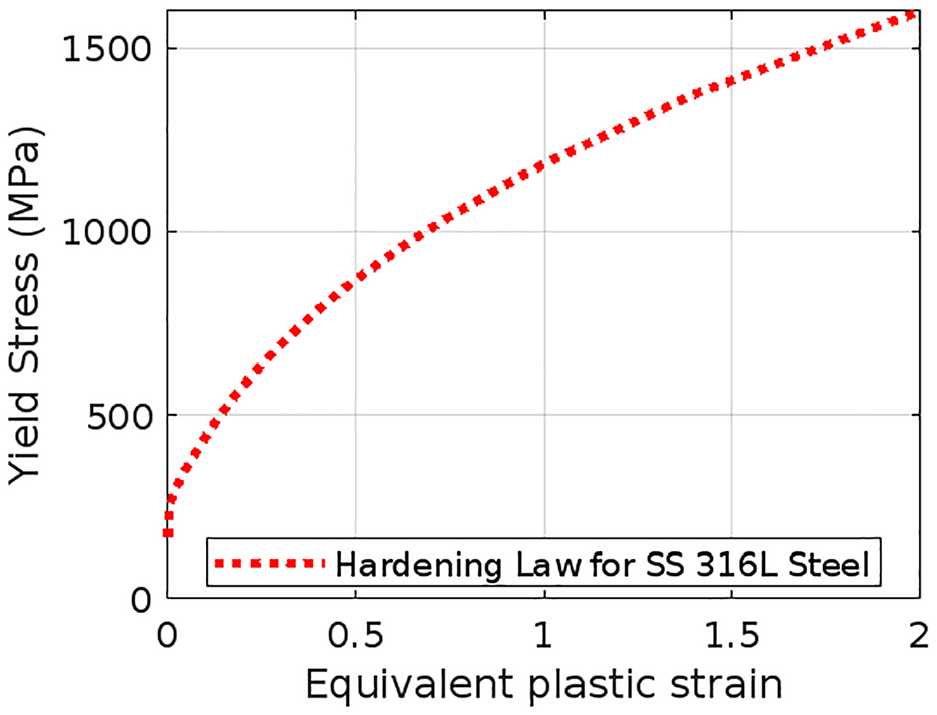
Hardening Law of the SS 315 L Stainless Steel used in the Simulations, Marie [17]. This figure depicts the stress-strain relationship for SS 315 L steel, highlighting its strain-hardening characteristics. The experimental data provides the foundation for modeling the material’s mechanical response under plastic deformation, ensuring accurate simulations of its behavior in structural applications.
Here also, a single 2D mesh is used since the issue of mesh sensitivity has already been considered quite comprehensively, in the works of Enakoutsa [12] and Enakoutsa et al. [7] in the numerical simulations of TA specimens.
In this experiment, lateral central triangular notches with a depth of
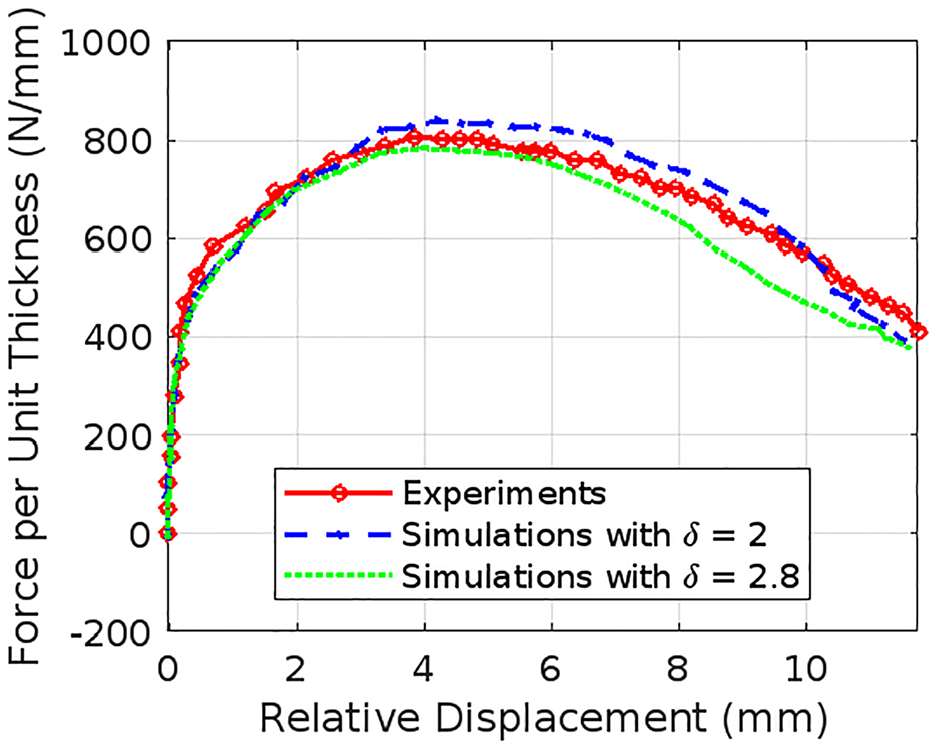
A detailed comparison of the experimental and computed load-displacement curves for the CT (Compact Tension) specimen of SS 316L stainless steel is presented. The experimental curves, obtained from physical tests, serve as a benchmark for validating the accuracy and predictive capabilities of the computational model. These curves illustrate the material’s response to loading and provide key insights into its fracture behavior under various conditions. The computed curves, derived from the nonlocal GLD model, are compared to the experimental data to assess the model’s ability to replicate the observed material response. This comparison not only highlights the model’s strengths but also reveals any discrepancies, which may point to areas where further refinement or adjustments are needed in the modeling approach. By juxtaposing the experimental and computational results, this analysis enables a deeper understanding of the material’s mechanical behavior and the effectiveness of the simulation techniques employed.
Figure 6 shows the experimental load-displacement curve (in red color) together with two numerical ones:
The blue curve shown in the figure has been obtained using the nonlocal GLD model, which incorporates the phenomenon of coalescence. The damage model parameters for coalescence were set to
The green curve has been generated using the same nonlocal GLD model, but with a significantly higher value of the coalescence accelerator parameter. This increased value leads to a pronounced discrepancy between the model prediction and the experimental data. The large deviation highlights the critical importance of accurately accounting for the coalescence mechanism in the model. Without properly capturing the influence of coalescence, the model fails to replicate the experimental results, emphasizing the necessity of fine-tuning the coalescence parameter to achieve a satisfactory fit. This observation underscores the sensitivity of the model to the choice of coalescence parameters and reinforces the need for a careful balance between the model’s theoretical foundations and experimental validation to ensure accurate predictions.
5. Conclusion
This paper has presented a comprehensive study of GSMs and their applications in metal plasticity and nonlocal damage models, addressing both theoretical and practical challenges. The GSM framework was shown to provide a robust and thermodynamically consistent foundation for modeling small strain von Mises plasticity and advanced ductile fracture mechanisms, such as those described by the GLD model. Numerical simulations of compact tension (CT) specimen fracture tests for two different steels highlighted the predictive accuracy and practical utility of the GLD framework, particularly in capturing the effects of cavity shape and porosity under realistic loading conditions.
For nonlocal damage models, two key theoretical results were established: the exponential attenuation of high-frequency components and the approximation of nonlocal formulations as diffusion-like equations. These findings underscore the regularizing nature of Gaussian kernels while highlighting the limitations of excessive smoothing, which can lead to unrealistic damage distributions. To address this, a modified evolution equation incorporating logarithmic terms was proposed, ensuring stability and spatial consistency while preserving the physical fidelity of the model. Furthermore, the sensitivity analysis of the length scale parameter l offered valuable insights into balancing regularization and physical accuracy, providing practical guidelines for the design and implementation of nonlocal formulations.
In conclusion, this work bridges critical gaps in the understanding and application of GSM and nonlocal damage models, offering both theoretical insights and practical tools for advancing the modeling of complex material behaviors. Future research should explore the extension of these findings to more diverse materials, loading conditions, and advanced numerical methods to further enhance their applicability and robustness.