
Abstract
Using ethnomethodology and conversation-analytical methodologies, this article shows how a blind person accomplishes going from A to B. Based on an analysis of a blind person’s walk from a zebra crossing to a train platform, the article offers empirical evidence of how pedestrians and the blind avoid collision in orderly and accountable ways. The article shows how the burden of the interactional work involved in avoidance seems consistently to rest on pedestrians rather than the blind. As the blind person walks, sighted pedestrians move aside. To describe this, we use the metaphor of Moses, who separated the waters. The article discusses the collaborative achievement, moral orders, and joint accomplishment of a blind person navigating in urban environments. It thereby contributes to the growing body of research within Ethnomethodology and Conversation Analysis studies focused on the spatial turn and public encounters by invoking a notion of hierarchy among pedestrians.
The challenges of public navigation for blind people are known from previous studies (e.g., Parkin & Smithies, 2012; Quéré & Relieu, 2001). Compared with other people, blind people and people with impaired vision seldom leave home and prefer a few very familiar routes (Neuschmid, Gajevic, Schrenk, & Wasserburger, 2014). It is common knowledge that mobility and navigation are complicated for blind people in general and even more complicated in urban environments with many coparticipants on the street.
Based on a corpus of video recordings of seven legally blind individuals’ naturally occurring walks from A to B, this article asks, How does a blind person navigate in an urban environment, and what resources do the blind person and other pedestrians use to jointly accomplish navigation and avoid collision? (cf. Psathas, 1992). This research question specifically relates to these interrelated questions: What are the primary embodied resources used by the blind person and other pedestrians respectively when approaching and passing each other?
The present article’s main contribution lies in answering these questions by introducing the idea of participants’ normative orientation (Broth & Mondada, 2013) and an orientation toward a spatial hierarchy. The article shows how the immanent potential collision between the blind and sighted pedestrians is avoided because the blind person consistently has the right-of-way as a coconstructed phenomenon accomplished through a variety of embodied and orderly coordinated resources as a sequentially organized activity. The pedestrians orient themselves to the emergent organization and closely monitor blind people’s trajectories and embodied projections, responding accordingly by moving out of the way when possible.
The Phenomenon
The phenomenon of interest is observable in the following excerpt (see Figure 1 below). It is a detailed visual transcription of three participants who are approaching each other: (a) the competent and skilled blind man, who the camera is following; (b) a construction worker ready to cross the sidewalk to the parked truck on the other side; and (c) an approaching woman with a pram.

The Moses effect, 2017, screenshots from video recordings.
We observe how a construction worker is about to cross the sidewalk, and a woman with a pram is approaching. They both gaze at the blind man and move out of the way, respectively, at a sequentially early position, leaving the blind man a free and untroubled trajectory. They leave a clear path for the blind man to pass—just as the water moves aside in the biblical narrative of Moses, who parted the water and crossed the Red Sea. We call this phenomenon the Moses effect, as the projectable trajectory of the blind man’s navigation is parting the way.
In our data set, this phenomenon is consistent across settings: The blind person keeps a steady trajectory, and other pedestrians monitor the blind person’s behavior and the emergent sequential organization, moving out of the way and seeking to secure a clear path for the blind person. Pedestrians—or coparticipants—thereby make a normative orientation to a spatial hierarchy that privileges blind people in public encounters. Thus, across settings and different blind people’s navigation, the interactional burden for undertaking the avoidance rests on the coparticipants. This is a coconstructed practice because the blind person projects a clear trajectory to which pedestrians can orient, but it is the pedestrians who do the avoiding and adjusting work. In some cases, coparticipants have clear sight and spatial possibilities to make a very early and visible adjustment to the blind person walking, but in more crowded urban environments, the projectability of next actions and thus the ability to move aside are more complex. In the remainder of this article, we focus on the specific resources for accomplishing the coconstruction of a blind man walking by examining a single case from a crowded urban environment. First, however, we introduce the data and methodology as well as situate the study in relation to research on mobility and space.
Data and Method
This article is part of a project on how to use new technologies as enhancements for blind people when they navigate in public environments. 1 During the project, we have interviewed, observed, conducted fieldwork, and followed blind and visually impaired subjects with a camera as they walk from home to various activities. This article is based on a corpus of 10 hours of video recordings of seven blind people navigating in an urban area in Denmark in 2016.
The focus on video recordings is informed by video ethnography (Heath, Hindmarsh, & Luff, 2010) and based on Garfinkel’s (1967) ethnomethodological work on people’s actual accountable practices as well as developments within multimodal conversation analysis (C. Goodwin, 2013; Mondada, 2014). This overall methodological approach will be referred to as EMCA (Ethnomethodology and Conversation Analysis). A fundamental aim in EMCA is to analyze how participants accomplish social order in their interactions and how they reflexively exhibit the accountability of their actions. Although EM and especially CA have primarily been used to analyze talk-in-interaction, Mondada (2016) shows how to apply CA in a nontalking environment, for example, through the use of embodied sequentialities (cf. Lee & Watson, 1993).
We use EMCA because of the explanatory power of emic descriptions of people’s resources for accomplishing mundane activities in an orderly and sequential manner. Our object of analysis is a nonspeech system since the negotiation of space and walking trajectories in our data occur without talk-in-interaction. In applying the analytic mentality of EMCA, we do not claim that the actions of the blind person make specific second actions from the sighted pedestrians conditionally relevant (Schegloff, 1972) but rather that the actions of the blind person prompt and project sequentially fitted reactions by the sighted pedestrians to avoid collisions. We also claim that participants use multimodal resources to accomplish their everyday activities. It will be shown that the possibility of avoiding collision with the blind person navigating is related to pedestrians’ timely interpretation of the blind person as displaying a distinct membership category of doing being a blind person with projectable category-bound activities such as keeping a straight trajectory and possibly sweeping the cane. Attached to the membership category “blind person navigating” are thus both category-bound activities for the blind person (maintaining his trajectory) and reciprocal categories for the coparticipants (avoiding colliding with the blind person). Thus, this article also contributes to the field of MCA (Hester & Eglin, 1997; Sacks, 1989; Schegloff, 2007) by expanding the analytical framework from being solely related to talk-in-interaction to also being related to a nonspeech interactional system.
Applying the EMCA mentality also means separating analytical observations of the visible and accountable resources from more speculative reflections on how some of the more cognitive resources are used interactionally (e.g., tactile feeling) or what they mean on the cognitive level.
One aim of the transcription is to provide sufficient detail for readers to grasp the processes of interaction, thereby capturing the here-and-now detail that was available to, and used by, the participants themselves in situ as captured by the video. The aim is to represent the unfolding, sequential organization of social interaction. We show the natural flow and rhythm frame by frame. This means of transcribing is inspired by similar practices in EMCA literature (Broth & Keevallik, 2014; Haddington & Rauniomaa, 2014; McIlvenny, 2014). The transcript is thus designed to be intuitively grasped and includes pictures that have time codes (mm:ss:ms) to show their temporal organization.
Walking, Mobility, and Navigation
We specifically approach the spatial turn from an EMCA perspective because this allows us to study the details of the encounters from participants’ points of view, that is, an emic approach (Auer, Hilpert, Stukenbrock, & Szmrecsanyi, 2014; Haddington, Mondada, & Nevile, 2013). This EMCA approach is distinct from other types of studies due to its strong focus on members’ own orientations and sequentially visible and multimodal sense-making processes on the micro level of interaction.
Walking, embodied conduct, and mobility in more general terms have from this perspective been studied in a range of places. These include space and material structure as resources for play (M. H. Goodwin, 1980), visiting museums (vom Lehn, 2013), interrogating suspects (LeBaron & Streeck, 1997), using mobile phones (Arminen & Weilenmann, 2009), and dancing lessons (Keevallik, 2013). Generally speaking, however, there has been a tendency to focus on space as a static phenomenon with varying contextual configurations (e.g., C. Goodwin, 2000). A similarly static focus is found in work on territories (Ashcraft & Scheflen, 1976; Scheflen, 1976) and proxemics (Hall, 1966). Generally speaking, analyses of mobility and navigation in public environments should take into account the movement and flow of participants and coparticipants.
Our study contributes new knowledge concerning these fleeting encounters and thus represents a further development of EMCA multimodal interaction analysis of public encounters. We thereby build on Ryave and Schenkein’s (1974) work on the art of walking; Lee and Watson’s (1993) work on interaction in public spaces (1993); Psathas’s (1976, 1992) work on mobility, orientation, and navigation; and Garfinkel’s (2002) studies of walking behavior. Studies on mobile formations (Broth & Keevallik, 2014; De Stefani & Mondada, 2014; McIlvenny, Broth, & Haddington, 2014; Mondada, 2009), walking together (Broth & Mondada, 2013; Weilenmann, Normark, & Laurier, 2014), walking and talking and the spatial embeddedness of talk (Relieu, 1999), and going to and from grocery shopping (Francis & Hester, 2004) are also important investigations of various aspects of mobility and social relations in different settings. Of special interest, however, are studies focused on pedestrians embodied “negotiations” of rights to walk where and at what time. One such study is Liberman’s (2013) work on the “Kincaid crossing.” Our data excerpt concerns a blind person crossing a street, and we draw especially on Liberman’s descriptions of how orderliness is accomplished in such a setting and how right-of-way is negotiated through embodied actions such as walking behavior and gaze. In a study about “walking away” as a resource for activity closing, Broth and Mondada (2013) show how participants display their respective rights and obligations and how the walking away action is an interactionally achieved and negotiated practice. As Broth and Mondada as well as Liberman show, “normal” sighted pedestrian activity involves negotiation of right-of-way. Yet as exemplified above and more deeply analyzed below, a different orderly achieved everyday morality is at work in the context of a blind man navigating. As described by Saerberg (2010, 2015) in more general terms, blind navigation differs fundamentally from sighted navigation, and our study reports how walking in particular is achieved. Studies on blind people from an EMCA perspective include analyses of mobility in museums (Kreplak & Mondémé, 2014; vom Lehn, 2010) and using a guide dog for the purpose of navigation (Mondémé, 2011). This article contributes to the growing focus on mobility and interaction in space as members’ orderly accomplishment by focusing on (a) blind subjects’ resources in particular and (b) embodied negotiation of right-of-way (cf. Due & Lange, 2018).
Analysis of a Route Segment: Navigational Resources and Structural Affordances
The analysis will show how the blind man accomplishes navigating by carefully adjusted and coordinated actions as well as how other pedestrians orient to his embodied projections and adjust accordingly. The blind competent and skilled man is designated by the letter B. He is completely blind, with no light perception. His other senses function normally. The route analyzed is represented by the map in Figure 2 below.
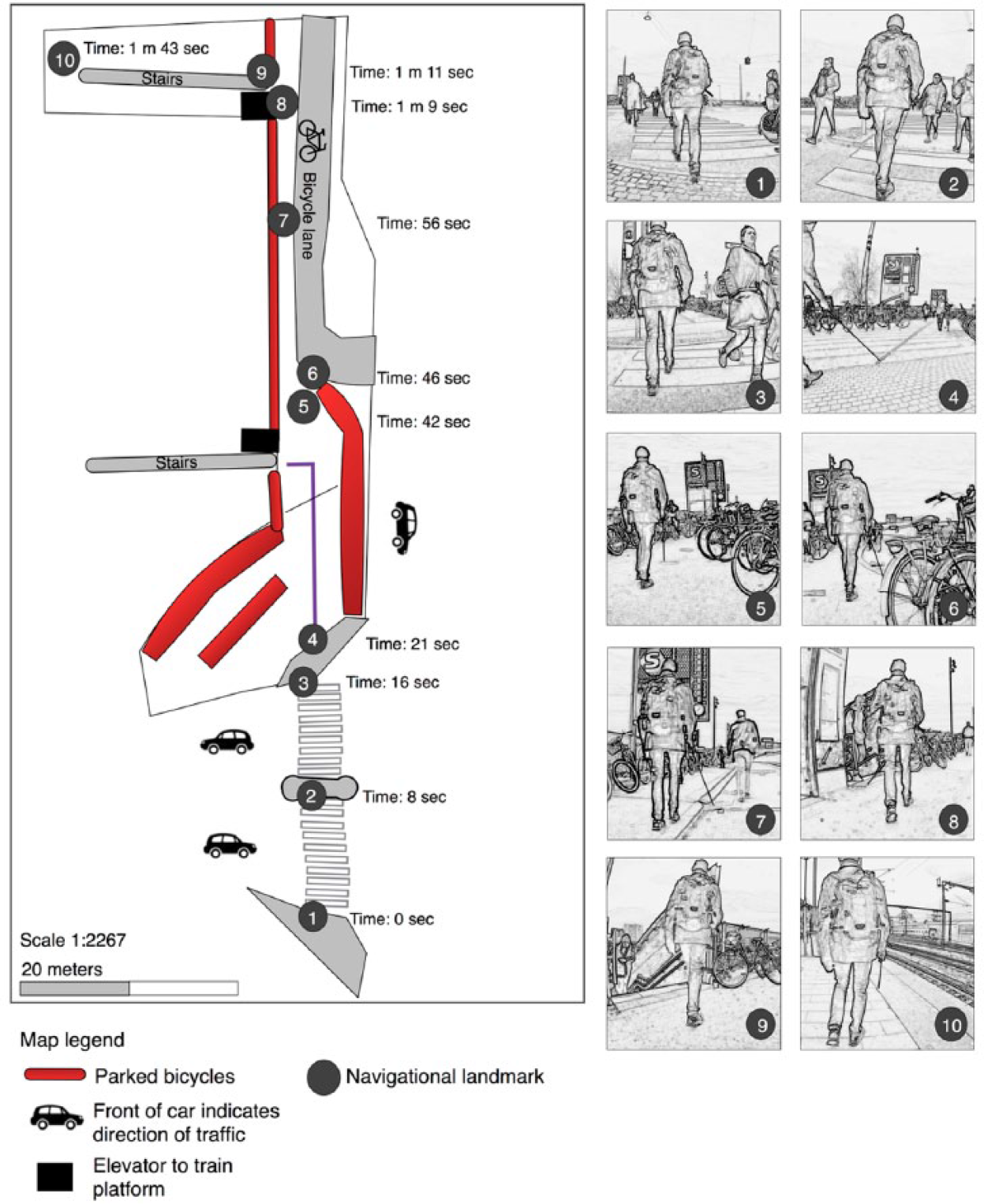
Overview of route segment, 2016, sketched map and still photos.
The Route and the Difference Between Landmarks and Orientation Points
The route is part of the larger route to the man’s workplace, which takes approximately 30 minutes in total. We could have chosen any one of many segments of the route for analysis, as the navigation is accomplished continuously, and the embodied negotiation of right-of-way is constant whenever there are other people nearby. However, the specific activity on which we are focusing is the joint accomplishment of navigation in a crowded place. The analyzed route segment is approximately 96 meters long in total, and it takes B 1 minute and 43 seconds to walk from start to finish. The route segment starts at a zebra crossing and finishes as B reaches a train platform, from which he takes a train.
The 10 points highlighted in Figure 2 are distinctive navigational marks to which B orients. Such points are known as “landmarks” in the orientation and mobility literature and are thus physical structures. We have observed that B consequently uses these marks when navigating this route. The landmarks are actual physical structures that B touches with his cane and feet during navigation. Defining or constructing these personal and recognizable landmarks are important to learning to navigate a certain route, and B has deliberately created the landmarks along the route. The 10 landmarks are crucial to B’s navigation as they offer very reliable information (e.g., the position of a curb or tactile guidance line).
The position of a curb rarely changes, but other factors are much more dynamic, like moving cars and pedestrians. As Psathas (1992) has shown, locating external orientation reference points and achieving proper bodily orientation are also important parts of training blind mobility. A landmark is thus a predefined, static, and personally constructed specific physical mark, while an orientation reference point is defined as a possibly changeable sign in the environment, which can be a mark but can also be something different, such as the sound of traffic, a tactile experience, or people talking and walking. These landmarks and orientation reference points are subjective resources for the blind person navigating. However, the blind person’s own resources are far from being enough. Pedestrians, or what we might call coparticipants, jointly coconstruct a safe passage by embodied orienting and adjusting to the blind person, as we will show in the analysis.
Avoiding Collision With the Blind (“The Moses Effect”)
The first segment of the analyzed route is a zebra crossing with a traffic light. Standing at the crossing, B does not move until the sound beacon signal changes, conveying that pedestrians have the right of way. B stands at the zebra crossing, and Figure 3 shows what happens when B starts moving out onto the zebra crossing after the lights and beeps change.

A straight trajectory, 2017, screenshot from video recordings.
As B starts moving, he holds the cane steadily in front of his body with his right hand, at a downward angle. Moving from the pavement out onto the zebra crossing means moving into a different space with different affordances than the pavement from which B came. In our collection of walking data, the pedestrians normally walk in any direction and at different pace across zebra crossings. However, everyone also walks as a crowd because they all start walking at roughly the same time as the light/beeping sound changes. Still, this road crossing seems to be accomplished in an orderly manner. The blind man’s conspicuously observable use of the cane, combined with his clear projected trajectory are key resources to which others can orient, as we shall see in the following analysis.
Holding the cane at a downward angle allows B to orient toward the relevant orientation points in the pavement while decreasing the risk of hitting other people. With his cane, and later with his foot, B touches and thereby possibly receives tactile feedback from the curb that leads onto the road. B maintains a straight trajectory across the crossing, presumably guided by audio cues (traffic and sound beacon) and tactile cues from the white zebra markings, which are slightly elevated from the pavement. We wish to focus, however, on how the orderliness of the crossing is visible and accountably accomplished through the other pedestrians’ orientation to the blind man’s projectable trajectory.
As he crosses, B passes several other pedestrians who are walking across the crossing in the opposite direction. They collaboratively construct the joint action of walking between and around each other, which is primarily accomplished through the projectable trajectories of their walking behavior in seen but unnoticed ways (Weilenmann et al., 2014). Whereas B maintains his trajectory in a very straight line from the start to the end of the crossing, the other pedestrians change trajectories when they find themselves on a collision course with B. It is observable from the transcript (all pictures in Figures 4a and 4b) that B keeps a quite consistent angle on the zebra crossing relative to the square design of the stripes in the crossing (marked with an arrow). This could be due to the physical structure and affordance of the stripes and his tactile experience of this structure, which serve as resources for his own straight walk. More important than how B manages to keep the straight trajectory is that his walk is also a displayed and socially accountable action that is visible to others. The white cane and walking behavior signal to coparticipants that this is a blind person walking, with expectable and projectable category-bound activities. The coparticipants demonstratively orient toward his walking behavior and produce embodied responses to his actions by avoiding walking in “his” line. This is shown in Figures 4a and 4b, which have been split into two for easier presentation.
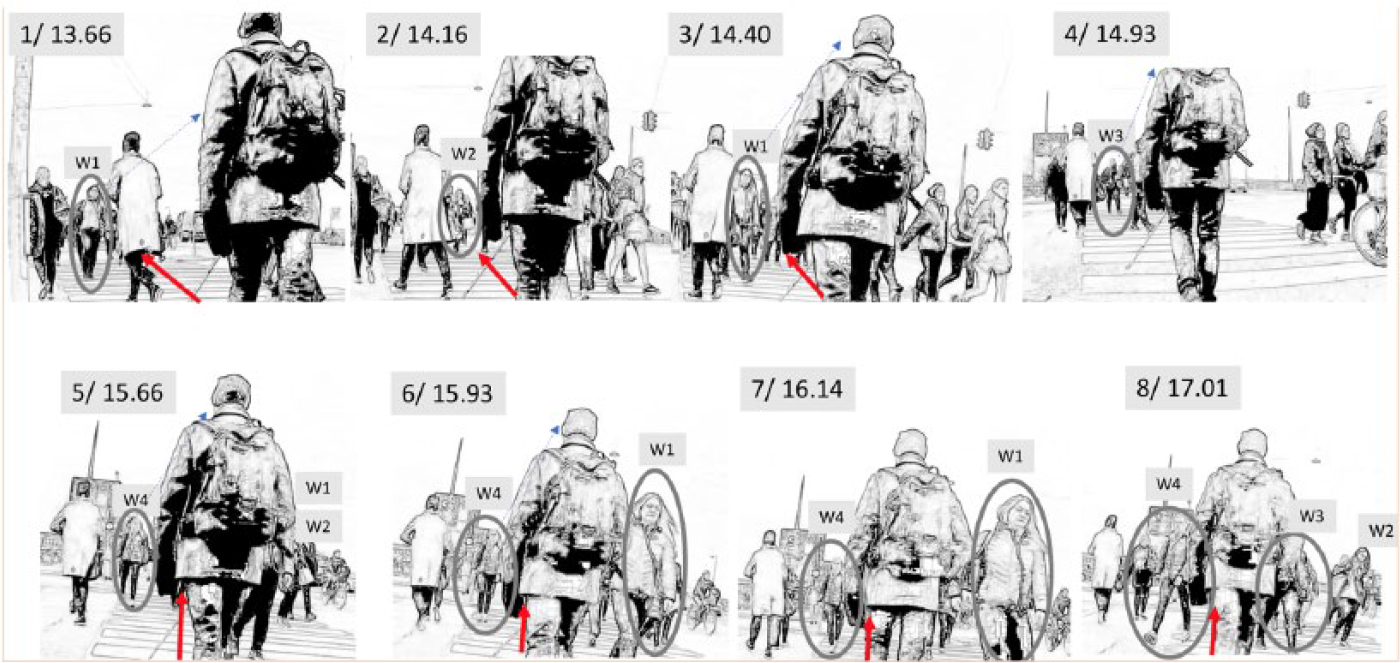
The Moses effect when a blind man is navigating in an urban setting, 2017, screenshot from video recordings.
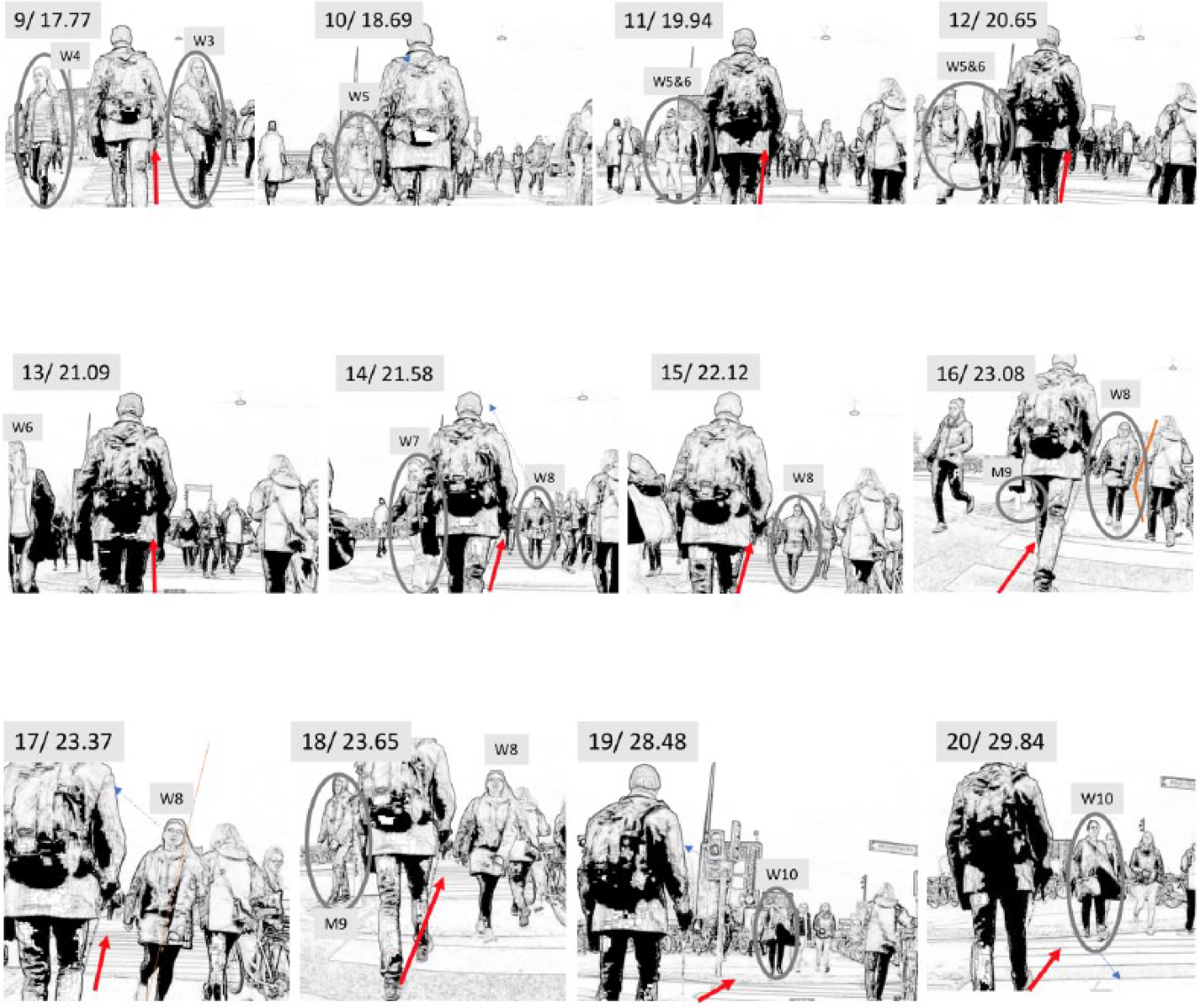
The Moses effect when a blind man is navigating in an urban setting, 2017, screenshot from video recordings.
Starting in Picture 1, B is walking straight ahead with the white cane down and a steady body position. The woman (W1) is approaching directly in front of him. We observe that W1 has clear visible access to B through head position and gaze direction. In Picture 2, we see that W2 is approaching in the background while having visible access to B, and B maintains a straight trajectory. Moving on to Picture 3, W1 is getting closer to B. In Picture 4, W3 is approaching and also has clear visible access to B and is thus able to adjust in time. We notice how W1 and W2 have now moved across the crossing in Picture 5. They have both moved from being on a collision course with B in Pictures 1 to 3 to now moving to the right side, thus orienting and adjusting to his behavior. We also notice how W4 is approaching on the left side and how she also—through embodied position, head movement, and gaze direction—is orienting toward B. In Pictures 6 to 7, W1 is now close to B, and we notice how she makes an adjustment by making a hard turn to the right while moving her arm (carrying a bag) backward, so as to not collide with B or even touch his body slightly. This slalom-like movement is applied to avoid collision and is embodied work done by W1 alone, as B does not adjust his trajectory. We notice the grimace W1 makes during this upgraded adjustment and interpret it as a response to the near collision (cf. Kaukomaa, Peräkylä, & Ruusuvuori, 2015). B is not doing anything besides using the cane and keeping a projectable trajectory. In Picture 8, W4 now makes an embodied adjustment by taking a clear step to the left. At the same time, W2 and W3 display an orientation toward B as the one with right-of-way by keeping clear distance from him on his right side.
Continuing the analysis with Picture 9 in Figure 4b, both W3 and W4 have had the opportunity to visibly recognize B from distance as a blind person navigating and are thus able to adjust accordingly and in intricately, orderly, and sequentially fitted manners. Picture 9 nicely illustrates the Moses effect as two pedestrians who had been on a collision course with B, clearly orient toward his trajectory and give him the right-of-way. In Picture 10, W5 is approaching together with W6. W5 turns her head and gazes at B. After this, in Picture 11, W5 is clearly adjusting to the trajectory of B by taking a step to the left, thus leaving room for W6 to likewise walk past B without colliding. They move away from B and thus secure him safe passage. In Pictures 12 to 13, W5 and W6 maintain the new trajectory moving slightly away from B and thereby pass by B without touching or colliding with him. In Picture 14, W7 becomes visible to the camera. She had not been visible earlier as she had been walking on a collision course toward B and was thus concealed from the camera by B’s body. At a sequentially relevant time, she moves out of the way of B, who maintains the exact same angle on the crossing and thus produces a projectable and recognizable behavior to which sighted pedestrians can orient and adjust. We also notice how W8 is approaching and has clear visible access to B. She orients toward him through head movement and gaze. In Picture 15, W8 is walking faster than the girl to her right, but at this point, a woman walking with a bike is also approaching from behind, close to B. This constructs an interesting slalom-like movement as she needs to adjust her pace, body position, and trajectory in accordance with the projectable behavior from both the blind man and the woman with the bike. In Picture 16, we notice how the woman with the bike is walking faster than B and thus meets with W8 before she meets B, which enables her to first adjust to the woman with the bike and then to B. This is accomplished as a minimal action, just barely moving aside for the woman with the bike, and in this case, there might be an embodied negotiation of which of these two pedestrians has the right-of-way. In Picture 16, it is clearly W8 who adjusts her trajectory, but the adjustment is produced in such a way as to quickly reorganize the orientation toward B and then to permit movement her to move out of his way to the right. This is shown in the picture by the inserted angled line showing the slalom-like movement. We also notice how the man (M9), who was not visible earlier, is now approaching and making a move away from B, at this point walking on the pavement. In Picture 17, we notice that W8 now is clear of the woman with the bike and clearly orients toward B by head and gaze direction and by keeping a path away from the trajectory projected by B. Again, her angled body position, which leans away from B, is shown with a line. In Picture 18, M9 (whose feet were marked in Picture 16) is now visible, walking outside the marked crossing. One could speculate that an avoidance tactic has been deployed, leaving the marked crossing and making a turn around the street lamp in the middle of the crossing, to keep clear of B. W8 keeps looking at and moving away from B, who still maintains the same trajectory relative to the stripes in the crossing. In the time after Picture 18, there is a short pause in the flow of people approaching B in the crossing, and Picture 19 is approximately 5 seconds later, when three people are approaching the crossing. They have clear visible sight to B, and W10 orients toward B through head movement, gaze, and body posture. In Picture 20, W10 speeds up, initiating a move from walking alongside the two other women at her left side to walking in front of them. This is initiated in Picture 19 and progressively accomplished in Picture 20. Again, this move is interpretable as a demonstratively relevant response to the blind man approaching and further that the blind man “naturally” has the moral right-of-way. At least, this is how the other pedestrians normatively orient toward the blind man.
We thus notice how pedestrians use a range of multimodal resources to coconstruct the blind man’s safe passage and how this joint activity is accomplished as a Moses effect, in which sighted pedestrians move aside from the blind man’s visible and projectable trajectory. Participants use gaze and peripheral vision, adjust to the shifting affordances of the material structure, adapt to the pace and rhythm of their own and other’s walking, and produce slalom-like movements to avoid colliding with the blind man navigating while also monitoring other pedestrians. The coparticipants’ trajectories are thus structured as a response to the walking behavior and hence projectable straight line of the blind man (illustrated in transcript by the arrow).
The phenomenon of people changing trajectories when approaching a blind person is consistent with other data in our video corpus. We have, as described, labelled this phenomenon the Moses effect—not to suggest any religious or other metaphorical connotations but simply to give the analogy of a man with a cane who can conjure up a walkable path. B and the other pedestrians coachieve this effect: B by maintaining as steady a trajectory as possible and not using his cane for sweeping but simply for touching the curbs and as a symbol to others that he is blind, and the other pedestrians by changing trajectories and circumventing B. The only times in the rest of our data set when we observed people who did not (or only at a very late stage) change trajectories when walking toward B was when they were visibly engaged in other activities, such as texting on a mobile phone, lighting a cigarette, or had limited viewing opportunities because they were standing with their backs to B or exiting a staircase. We will return to this in the analysis of the next segment.
Reverse Moses Effect and Trouble Sources
After B reaches the end of the crossing, he walks toward the stairs going down to the train station. We include this part of his journey because it involves two other phenomena of interest with regard to the Moses effect and the resources used to accomplish this: (a) the reverse version in which pedestrians are approaching from behind (Figure 5) and (b) management of a clear trouble source.
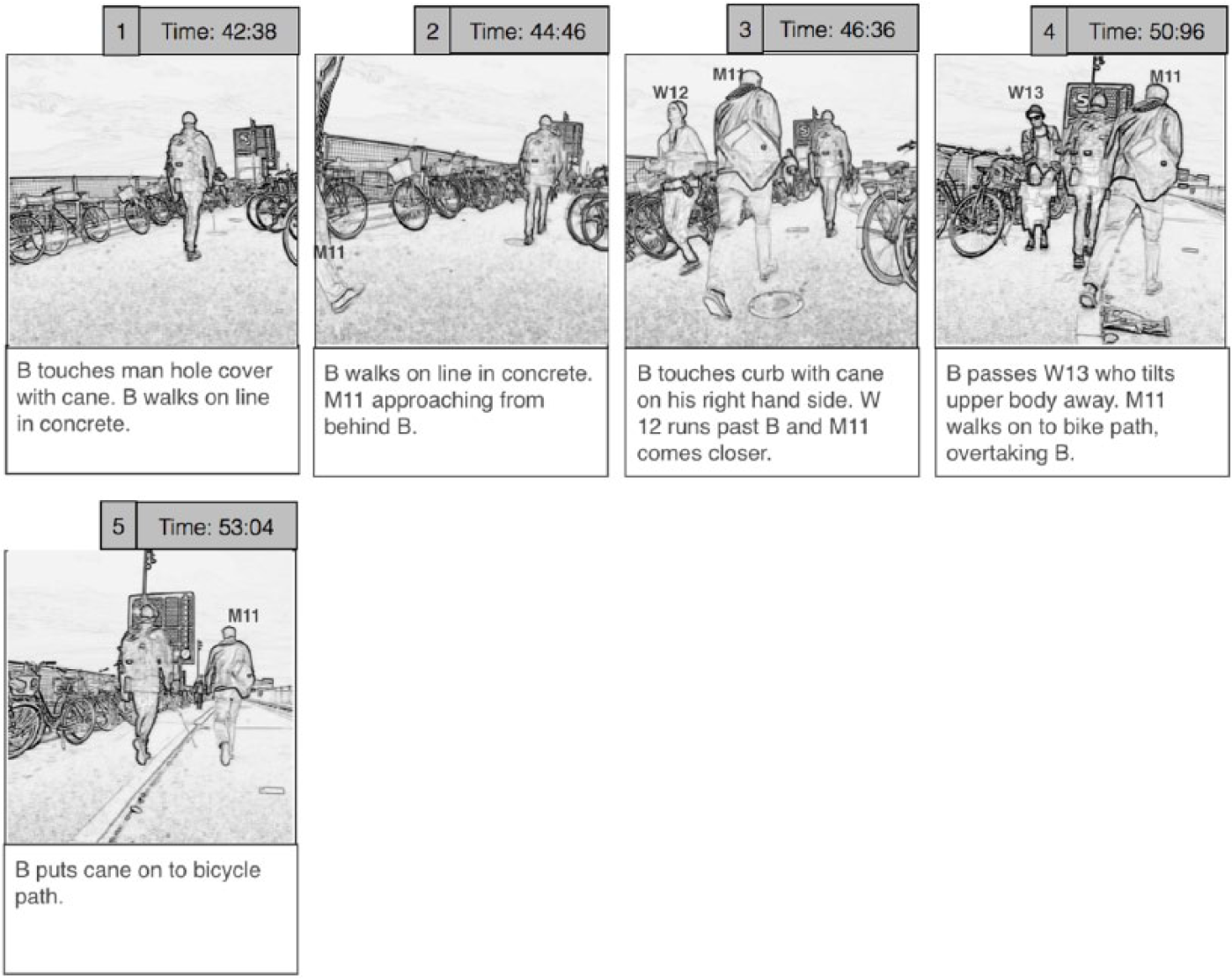
Approaching from behind, 2017, screenshot from video recordings.
B reaches a manhole cover, touching it with his cane. From the manhole, B walks on a fine line between two layers of asphalt toward the next landmark. At the same time, M11 approaches from behind, walking faster than B. In Picture 3, B finds the curb to his right with his cane and uses it to maintain a projectable trajectory (Figure 6). The walkable space in front of B becomes narrower as the pavement on his right is now a bicycle path, and bikes are parked at the railing to his left. The space is at its narrowest in Picture 4, in which W13, B, and M11 pass each other.
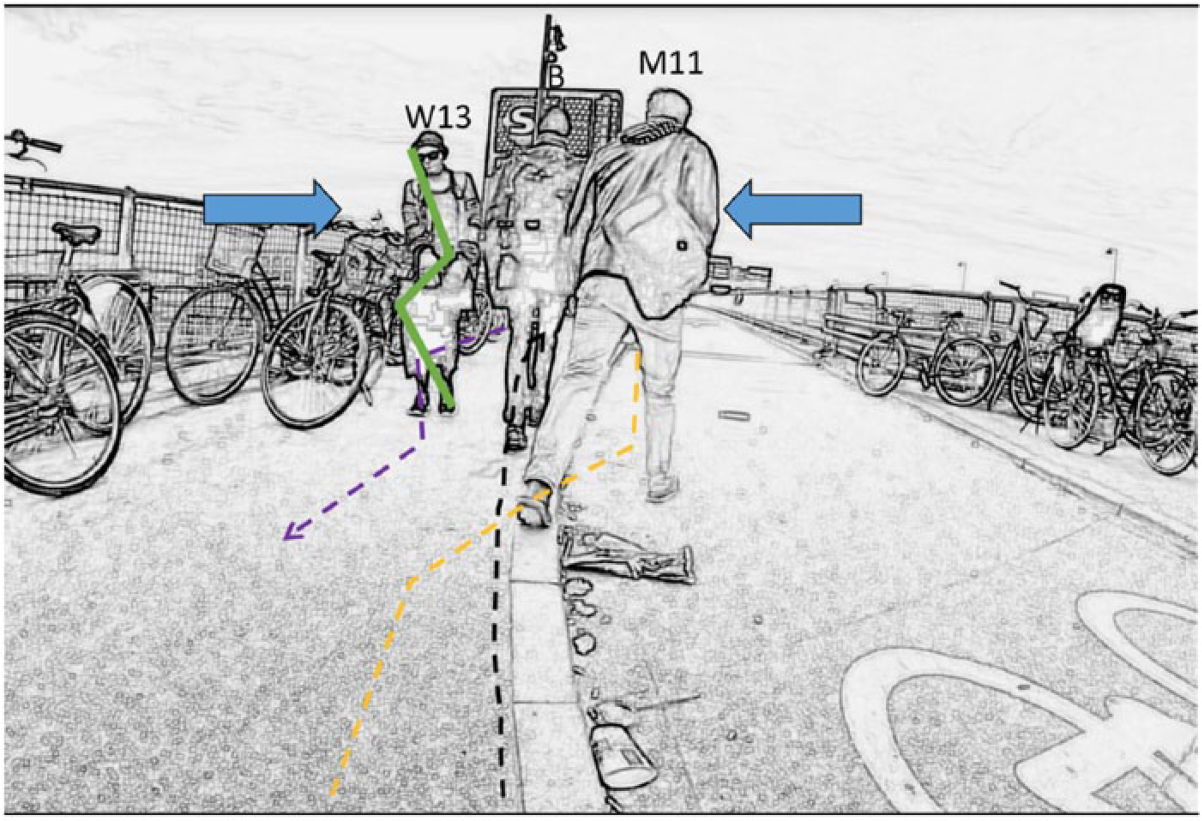
B maintains his presumed trajectory, 2017, screenshot from video recordings.
There is a potential collision with the blind man, and coparticipants orient toward this by adjusting their walking behavior. This is possible because they have visible access to the blind man and his projectable trajectory. We notice how W13 tilts her upper body away from B to avoid a collision, this is accomplished as a slalom-like or S-like body movement: the upper body with twisting arms in one direction and the lower body taking steps in a different direction to avoid collision. And M2 walks onto the bike path, allowing both B and M11 to maintain their pace. This situated avoidance practice is similar to the Moses effect described above in the sense that, depending on the affordances of the material structure, people tend to avoid colliding with the blind person navigating. In contrast to the above descriptions, however, this example shows how the Moses effect also works in reverse. This addition to the phenomenon makes it even more obvious how this is specifically related to blind people navigating, as it has nothing to do with eye contact or joint visible action between sighted pedestrians in general but only concerns a pedestrian’s interpretation of the blind person’s projectable trajectory, toward which pedestrian demonstratively oriented, even when they are approaching from behind while (presumably) having visible access to the key symbol in the form of the white cane. The burden of the interactional work of avoiding therefore seems to consistently rest on the coparticipants. We wish, however, to include instances in which pedestrians incorrectly interpret the blind man’s projected next actions. This happens as B continues his journey, and it is illustrated in Figure 7.
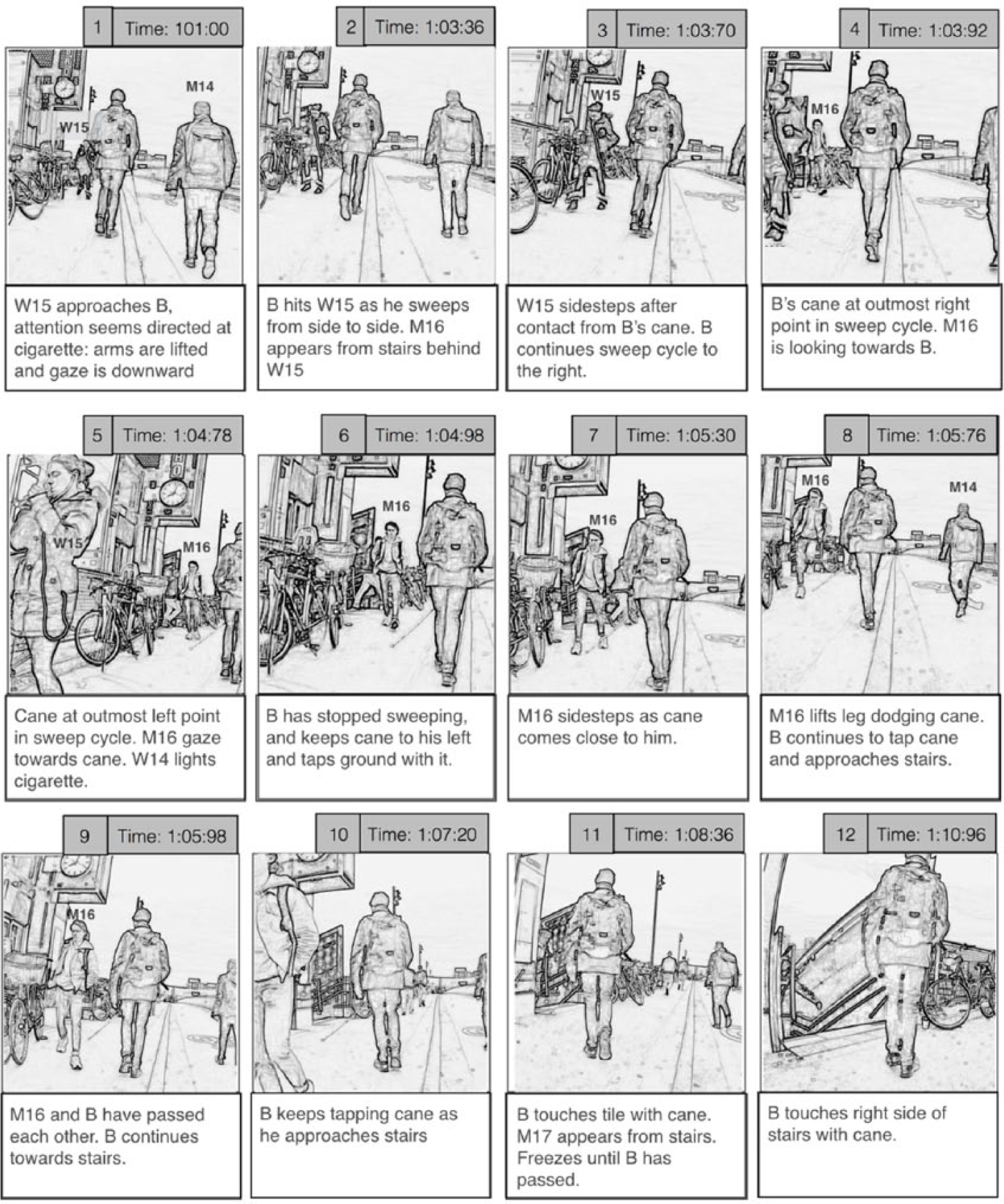
Hitting and avoiding, 2017, screenshot from video recordings.
In this transcription, we notice that B hits W15 with his cane as he passes her (see Picture 2). W15 did orient toward B by head direction and gaze as she stepped out on the sidewalk, probably recognizing him as a blind person, but she is at the same time visibly focused on lighting a cigarette as she approaches B. The affordances of the material structure are making it hard for W15 to adjust properly, but this is not the only trouble source. The collision could have been avoided had W15 stepped aside and waited, but she continues her own trajectory and possibly misinterprets the category-bound activities tied to using the white cane, for example, sweeping it from side to side.
Shortly after M16 appears from the stairs toward which B is headed and looks in B’s direction (Picture 4). It is observable that B changes the way in which he uses the cane: He stops sweeping and starts tapping (Picture 5). The tapping could serve as a navigational aid, providing B with different auditory information about the material structure through the echoes and as a warning to others through the increased sound. The man (M16) has few opportunities to predict the trajectory of the blind man but does in any case recognize him and his sudden departure from the straight trajectory through gaze or peripheral vision. If B had kept his straight trajectory as projected in the pictures leading up to Picture 6, there would probably not have been a collision. But as B makes the sudden turn shown in Picture 7, M16 is caught between the bicycles and the approaching blind man. However, the rule of avoiding the blind man is accomplished by quite gymnastic embodied work as M16 sidesteps and lifts his leg. We do not see this situation as a consequence of M16 failing to orient toward B being blind but rather as illustrating that M16 orients toward the projection of B’s next actions in an “incorrect” way. As a consequence, M16 must undertake embodied adjustment work.
Thus, the “rule” of the Moses effect seems to be that people try—in an orderly manner—to avoid getting in the way of the blind man navigating. When they fail, it is because of the affordances of the material setting and because they have difficulty projecting the trajectory and embodied actions of the blind man. In either case, the blind man walking is a collaborative construction that is accomplished through joint attention and is far from being an achievement of the blind man alone.
Discussion and Conclusion
This article has sketched out the multimodal actions involved in being a blind person navigating in detailed and coordinated ways with and in relation to coparticipants. Both the blind man and the coparticipants orient toward coconstructing the blind man’s navigation by means of different resources. The blind man constantly makes other pedestrians orient toward his own behavior to coconstruct a safe passage for the blind man. Such orientations consequently represent visible moral accountable actions. A crowded zebra crossing is a complex space for pedestrians, but the navigation is achieved in an orderly fashion because the blind man is visibly being a blind person navigating, and pedestrians normatively orient toward this membership category with projectable next actions as category-bound activities. The article has showed pedestrians’ systematically produced normative orientation toward a spatial hierarchy accomplished through embodied negotiations, leaving the blind man the primary right-of-way in all cases. Both the blind man and the coparticipants collaborate on achieving this encounter by methodically mobilizing a range of multimodal resources: walking trajectories, body positions, body postures, use of the white cane, and (for the sighted) head movement and gaze in a material setting.
There are no explicit traffic rules for spatial behavior in the presence of blind people or for how to spatially position oneself on the sidewalk as a blind person. Blind people have routines and are trained in navigating, but different moving pedestrians and other obstacles make each walk a situated and unique activity (Garfinkel, 1967). As shown in this article, however, certain resources constitute a local moral order for accomplishing this navigation through a mutual and collaborative organization of actions among situated participants. This is tied to the orderly accomplishment of the Moses effect. Pedestrians normatively orient toward the blind person as the person with a moral right-of-way, and they adjust accordingly by monitoring and interpreting the next embodied actions and projectable trajectory to avoid collision.
This article thus contributes to an understanding of the normative character of nextness within CA (Schegloff, 1972). This key term has been described by conversation analysis as something that is done through talk-in-interaction and usually embedded within a preference structure. As Streeck (1995) puts it, projections “prefigure the next moment, allowing the participants to negotiate joint courses of action” (p. 87). Besides projections designed through language, embodied projections have been observed as gestures (Streeck, 1995), head nodding (Stivers, 2008), torso turning (Schegloff, 1984), and rearrangements of working space (Mondada, 2006). The analyses have demonstrated the existence of social norms and orderly features of blind navigation, which project specific next actions from pedestrians. The data thus highlight the moral accountability of blind navigation toward which pedestrians orient, thereby coconstructing the accomplishment of blind navigation.
The article also contributes new perspectives on MCA. The white cane and projectable walking trajectory are resources that show pedestrians that a blind man is approaching. The affordances of the material surroundings mark out clear physical boundaries (e.g., bicycles) and, when they recognize it, coparticipants behave in accordance with the blind person’s projectable walking behavior (the Moses effect). There is no verbal membership categorization, but all the categorization work is accomplished in a nonspeaking and purely embodied and sociomaterial setting. While the original MCA literature only discusses verbal constructions, we have shown the fruitfulness of understanding categorization work as also tacitly and bodily constructed.
These descriptions make it relevant to discuss the normative and moral aspects (Jayyusi, 1984) of the coparticipants’ responses and their “situated avoidance practices.” The accountability of being a blind person walking and navigating seems strongly oriented toward as a moral category in public spaces. The analysis has demonstratively shown that blind people have the right-of-way and have the right to proceed along their trajectories. The moral orderliness of how to collaboratively coconstruct the actions of a blind person navigating are thus socially visible and displayed in public space.
Footnotes
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research was funded by the Synoptik Foundation.