
Abstract
Identification of nonlinear structural system is an important but challenging task for structural health monitoring. Due to the complexities of structural nonlinearities, it is hard to establish proper mathematical models for some structural nonlinear behaviors. Moreover, only partial structural responses can be measured in practice; it is essential to conduct identification of nonlinear structural systems using only partial measurements of structural responses. To cope with these issues, an algorithm is proposed in this article for the identification of some model-free structural nonlinear restoring forces using only partial measurements of structural responses. First, an equivalent linear structural system is introduced for the identification of the locations of structural nonlinearities. Then, a model-free structural nonlinear restoring force is approximated by a power series polynomial. The unknown coefficients of the power series polynomials together with other structural parameters are identified by the extended Kalman filter so that the characteristics of the behaviors of the model-free of nonlinear restoring forces can be identified. Some numerical examples including the identification of two nonlinear multi-story shear frames and a planar nonlinear truss with different structural nonlinear restoring forces are used to validate the proposed algorithm.
Keywords
Introduction
Structural nonlinearity is a common phenomenon encountered in engineering structures under severe dynamic loading (Jan, 2011; Kenderi and Fidlin (2014); Kerschena et al., 2006; Lee et al., 2010; Lei and He, 2013). Also, structural nonlinearity can be used as the indicator of the development of structural damage under dynamic excitation (Li et al., 2009; Masri et al., 1982; Pai, 2013; Peifer et al.,(2003); Wu et al., 2003; Xu et al., 2012). Consequently, it is an important task to detect and identify structural nonlinearities for structural health monitoring (SHM) (Lei et al., 2012; Masri et al., 1987a, 1987b; Wang et al., 2013b; Xu et al., 2015; Yi et al., 2013). However, identification of nonlinear dynamics structures is much less established than that of linear structures (Chen and Yu, 2013; Hernandez-Garcia et al., 2010; Wang et al., 2013a; Xu et al., 2015). Also, for some complex nonlinear structural systems, the mathematical forms of models are not clear, which makes the identification of nonlinear structural system even more difficult. Some identification approaches for model-free structural nonlinear systems have been proposed. Most of them are based on the restoring force surface (RFS) approach (Al-Hadid and Wright, 1992; Bai, 2008; Crawley and Aubert, 1986; Masri et al., 1982, 1987b; Peifer et al., 2003) in which structural nonlinear restoring forces are represented by polynomial series expansion. Masri et al. (1982, 1987a, 1987b) identified and analyzed the nonlinear structural systems in terms of their internal RFSs using Chebyshev polynomial for the expansion of structural nonlinear restoring forces. Then, they also presented some general data-based approaches by utilizing power series fitting techniques to develop reduced-order nonparametric models in nonlinear multi-degree-of-freedom (MDOF) systems (Hernandez-Garcia et al., 2010; Masri et al., 2006). In recent years, Xu and He (2015) and Xu et al. (2012) presented data-based identification of nonlinear restoring force using power series polynomial model, in which a power series polynomial approach involving the instantaneous values of system displacement and velocity was proposed to approximate structural nonlinear restoring force behaviors. The performances of the above RFS-based approaches have been validated by both numerical simulation and experimental studies. However, in prior studies on nonparametric identification of nonlinear structures, it is prerequisite that the locations of structural nonlinearities are known and/or complete measurements of all structural responses including accelerations, velocities, and displacements are available. When the locations of structural nonlinearities are not clear, the expansions of all structural nonlinear restoring forces lead to a large number of unknown coefficients in the polynomial series expansions, which makes system identification difficult.
For the practical application of structural identification (SI), it is desirable to identify nonlinear structural systems using only partial measurements of structural responses. As a superior approach over the conventional least-squares estimation which requires the measurements of all structural responses, the extended Kalman filter (EKF) (Hoshiya and Saito, 1984; Su et al., 2014; Yang et al., 2006) has been proved to be a useful tool for SI when only partial structural responses are measured. Also, EKF can be extended for the identification of nonlinear structures (Lei et al., 2012, 2013; Yang et al., 2006). EKF linearizes the nonlinear functions in both the state and observation equations with Taylor series expansions. Therefore, derivation of the Jacobian matrices in the linearization approximations to the nonlinear functions can be nontrivial and lead to implementation difficulties when the EKF is directly applied to the identification of a model-free nonlinear structure if the locations of structural nonlinearities are not prerequisite.
To cope with these issues, an algorithm is proposed in this article for the identification of some model-free structural nonlinear restoring forces using only partial measurements of structural responses. First, an equivalent linear structural system is introduced for an original nonlinear system and the locations of structural nonlinearities are identified. Then, a model-free structural nonlinear restoring force is approximated by a power series polynomial. The unknown coefficients of the power series polynomials together with other structural parameters are identified by the EKF so that the characteristics of the behaviors of the model-free nonlinear restoring forces can be identified. Some numerical examples including the identification of two nonlinear multi-story shear frames and a planar nonlinear truss with different structural nonlinear restoring forces are used to illustrate the application of the proposed algorithm.
Proposed identification algorithm
In general, the equation of motion for a nonlinear structure can be expressed as follows

where
For some complex structural nonlinear restoring forces, it is hard to establish proper mathematical forms to describe their behaviors. As a RFS approach, the nonlinear restoring forces are approximated by power series polynomial expansions involving the instantaneous values of the relative displacement and velocity responses of the structural system (Masri et al., 2006; Xu et al., 2012), that is
where

When the external excitation is so small that the structural is a line one and nonlinear restoring forces can be neglected, the equation of motion of the structure reduces to

where
The stiffness and damping parameters of the above linear structural system can be identified by the EKF using only partial measurements of the structural responses under small excitation. The extended state vector of the above linear structure is defined as

As accelerations are most commonly measured, partial measurements of structural acceleration responses are available. Then, the discrete form of observation equations is expressed as follows

where
Based on the EKF approach, the extended state vector can be recursively estimated as (Hoshiya and Saito, 1984; Lei et al., 2012)


where
Under strong external excitation, structural nonlinear effect becomes significant. The EKF can be extended for the identification of nonlinear structures (Lei et al., 2012, 2013; Yang et al., 2006) by liberalizing the nonlinear functions in state and observation equations with Taylor series expansions. However, when the locations of structural nonlinearities are unknown, the identification of nonlinear structural system is difficult due to so many unknown coefficients
Detection of the locations of structural nonlinear restoring forces
For the nonlinear structure described by equation (1), a corresponding equivalent linear structural system is introduced with the following equation of motion

where
Analogously, the state vector and the equivalent linear stiffness and damping parameters can be identified by the EKF using the partial measurements of nonlinear structural responses. Due to structural nonlinearity effects, there are differences between the identified values of equivalent structural parameters and those of the linear structure. These differences can be used as the indicators of the locations of structural nonlinearities. Also, the extents of differences indicate the levels of structural nonlinearities, which can be used for the estimation of p and q in equation (2).
Identification of the nonlinear restoring forces and system
After the identification of the locations of structural nonlinearities, structural nonlinear restoring forces at the identified locations of structural nonlinearities are approximated by the power series polynomials. Under the conditions that structural nonlinearities are not strong, the EKF can used for the identification of the model-free nonlinear structural system described by equations (1) and (2).
The equations for the extended state vector and the observation are nonlinear equations expressed as follows


where
Analogously, the extended state vector


where



where

That is, the nonlinear functions in state and observation equations are both linearized based on Taylor series expansions, in which Jacobian matrices are used as shown in equation (17).
Since structural nonlinear restoring forces only exist in the locations of structural nonlinearities while the other structural restoring forces are linear ones, the numbers of unknown parameters in the nonlinear restoring forces are greatly reduced due to the detection of structural nonlinearities in section “Detection of the locations of structural nonlinear restoring forces.” The computational burden of the derivation of the Jacobian matrices is also reduced. Therefore, proposed algorithm not only simplifies the identification of nonlinear structures, but also ensures identification convergence in the inverse problem.
Numerical examples
To validate the proposed algorithm for the identification of model-free structural nonlinear restoring forces using only partial measurements of structural responses, several numerical examples including the identification of two nonlinear multi-story shear frames and a planar truss with different nonlinear structural nonlinear restoring force models and locations are used. However, it is addressed that these models are only used in the direct structural response analyses. They are not used in the inversed identification processes where model-free structural nonlinear restoring forces are adopted in.
Identification of nonlinear story restoring forces in multi-story shear frames
First, the numerical examples of the detection and identification of nonlinear story restoring forces in multi-story shear frames are used to validate the proposed algorithm. The building is subjected to white noise excitation at the top floor. The numerical calculation responses are treated as “measured responses” for the identification problem. Also, the influence of measurement noise is considered by superimposition of the computed response quantities with Gaussian noise processes.
Identification of a six-story nonlinear shear frame
The linear structural parameters of the six-story shear frame are assumed as mass of each floor mi = 600 kg, each story stiffness ki = 240 kN/m, and each story damping coefficient ci = 0.20 kN s/m (i = 1,2,…, 6). Only the acceleration responses at the first, third, and fifth floors are used in identification. The acceleration responses are added by white noises with 5% noise-to-signal ratio in root mean square (rms).
The linear structural parameters of the six-story shear frame can be identified by the EKF with the partial measurements of acceleration responses of the frame under low level white noise excitation. The identification results are shown in the third and fifth columns in Tables 1 and 4.
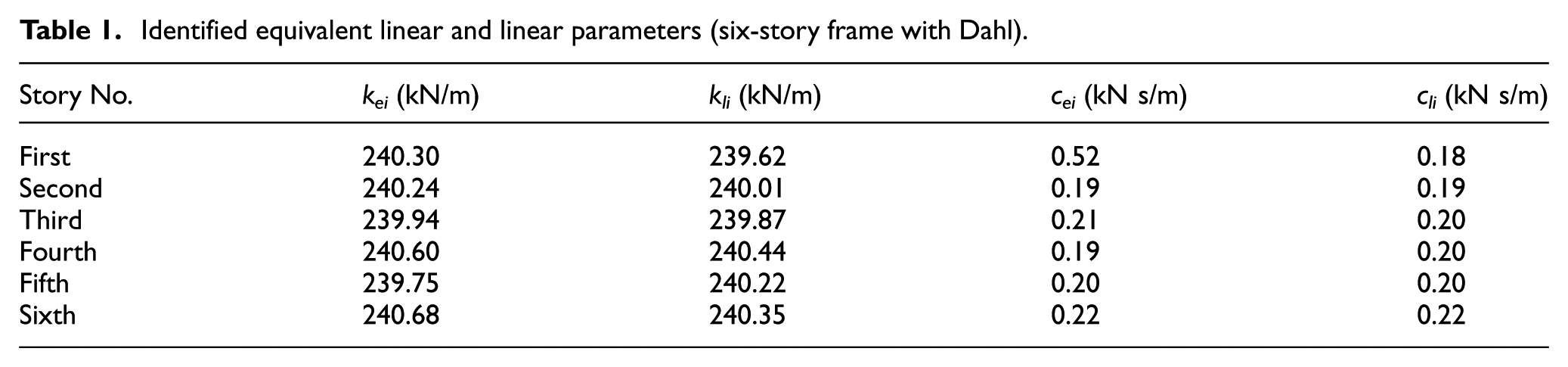
Identified equivalent linear and linear parameters (six-story frame with Dahl).
When the above six-story shear frame is subjected to higher level white noise excitation, structural nonlinearities occur in the frame.
Case I
The identification of story nonlinear restoring forces in Dahl models (Dahl, 1976) is studied. In the Dahl model, the nonlinear restoring force is expressed as follows

where k0i, c0i, fdi, and f0i are model parameters, and zi is the Coulomb dry friction described as follows

In the numerical example, it is assumed that story nonlinear restoring forces in Dahl models exist in the first story with the parameters set as follows: k01,0 = 0.02 kN/m, c01,0 = 0.2 kN s/m, fd1,0 = 70 kN, f01,0 = 0, and σ1,0 = 1000 s/m. An equivalent linear frame is established and identified by the EKF using the measured partial nonlinear structural responses. The identification results of equivalent linear parameters are shown and compared with those of the linear frame in Table 1. From the comparisons, it is noted that there are large differences between the identified equivalent damping and linear damping parameters in the first story, which indicates the location of the structural nonlinear story force.
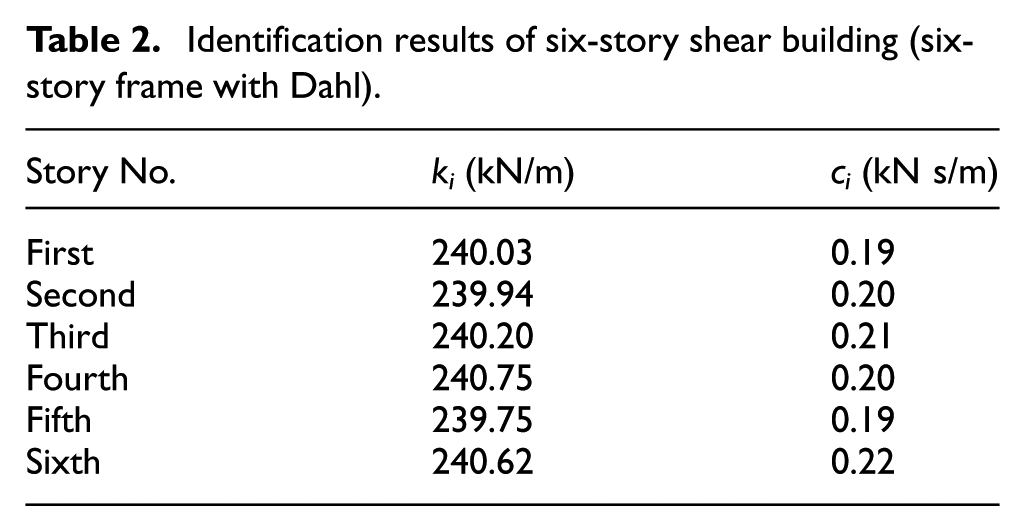
Then, the EKF is utilized to identify the nonlinear structure in which the model-free nonlinear story restoring force is approximated by a power series polynomial. The identified structural parameters and coefficients of the polynomial are shown in Tables 2 and 3.
Identification results of six-story shear building (six-story frame with Dahl).
Identified coefficients of power series polynomial (six-story frame with Dahl).

Figure 1(a) to (d) shows the comparisons of the identified structural displacement and velocity responses with the exact structural responses. Figure 2 shows the comparison of the identified first story nonlinear restoring force with the exact force.
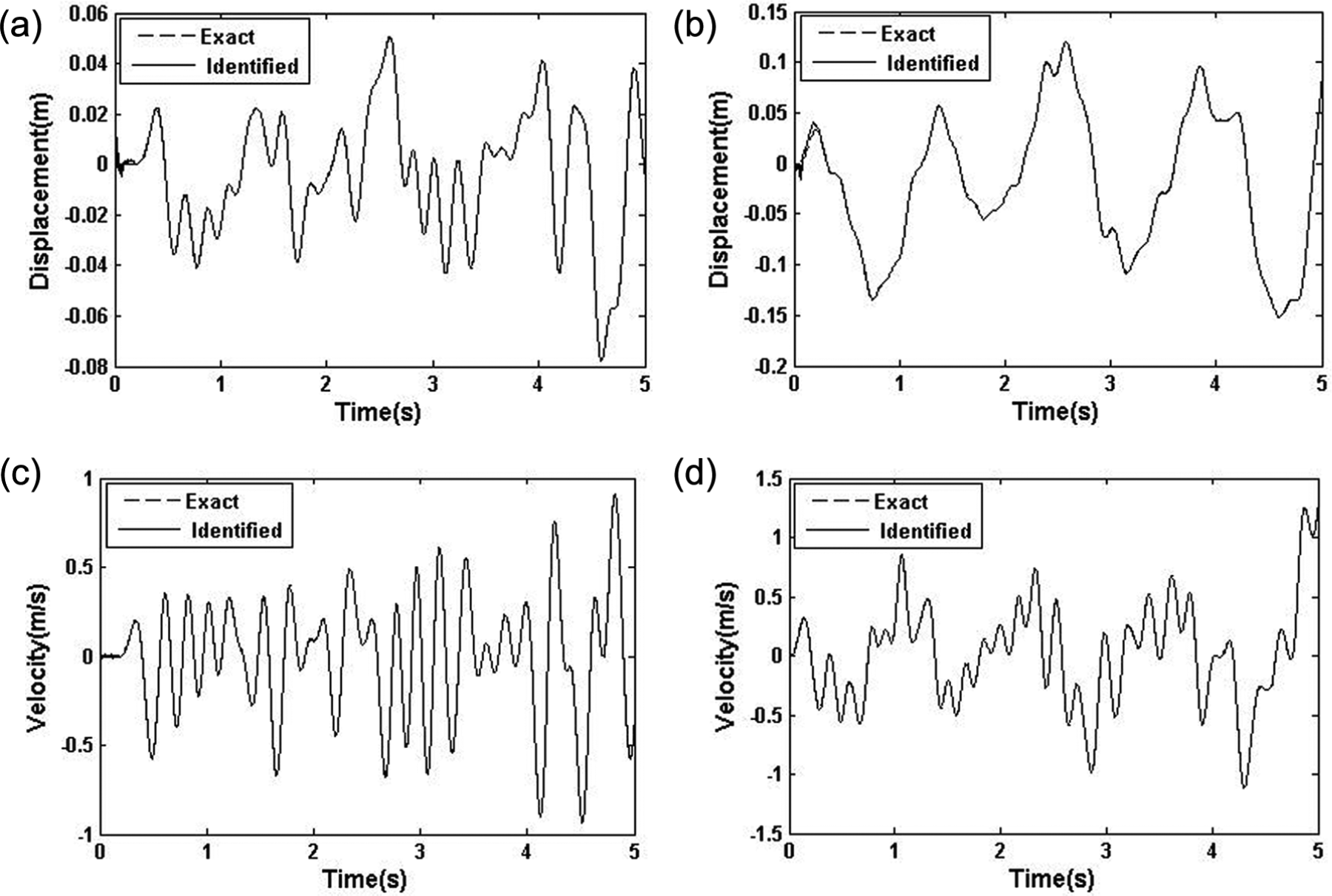
Responses of the nonlinear six-story shear frame (Dahl): (a) displacement of the first floor, (b) displacement of the fifth floor, (c) velocity of the first floor, and (d) velocity of the fifth floor.
First story nonlinear restoring force (six-story frame with Dahl).
Case II
The identification of story nonlinear restoring forces in Bingham model is further studied. Bingham model is another simple but useful model for the nonlinear behavior of magnetorheological (MR) damper (Stanway et al., 1987). The nonlinear restoring force with Bingham model is described as follows

where fci,i − 1, c0i,i − 1, and f0i,i − 1 are model parameters, respectively. In this numerical example, it is assumed that story nonlinear restoring force with Bingham model is in the first story of the building and the Bingham model parameters are selected as follows: fc1,0 = 0.04 kN, c01,0 = 0.20 kN s/m, and f01,0 = 0.
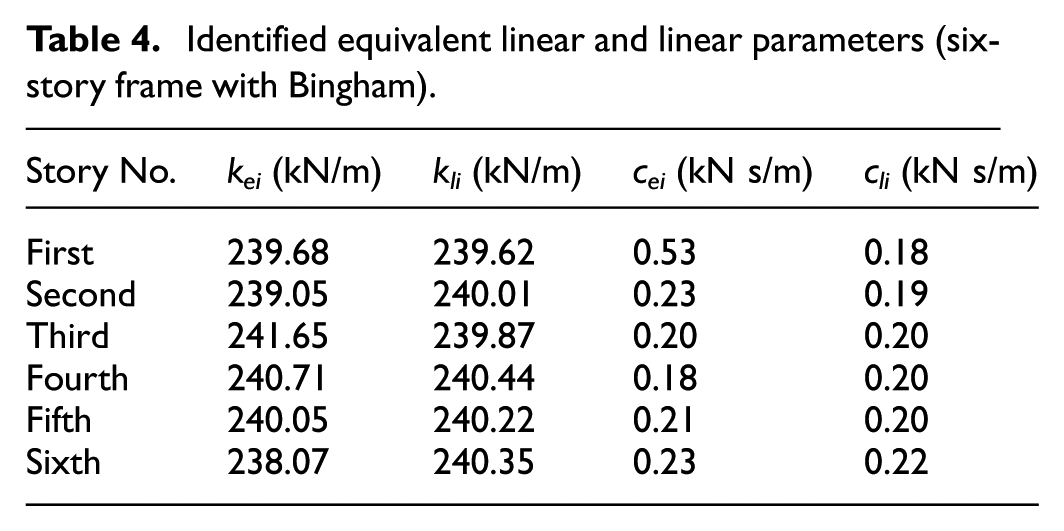
In this example, the excitation used is the N-S El Centro earthquake ground motion with a peak acceleration scaled to 0.2 g. An equivalent linear structure is established and identified by EKF using the partial measurements of structural nonlinear responses. The identification results of equivalent linear parameters are shown and compared with linear ones in Table 4. From the comparison, the location of the structural nonlinearity can be identified.
Identified equivalent linear and linear parameters (six-story frame with Bingham).
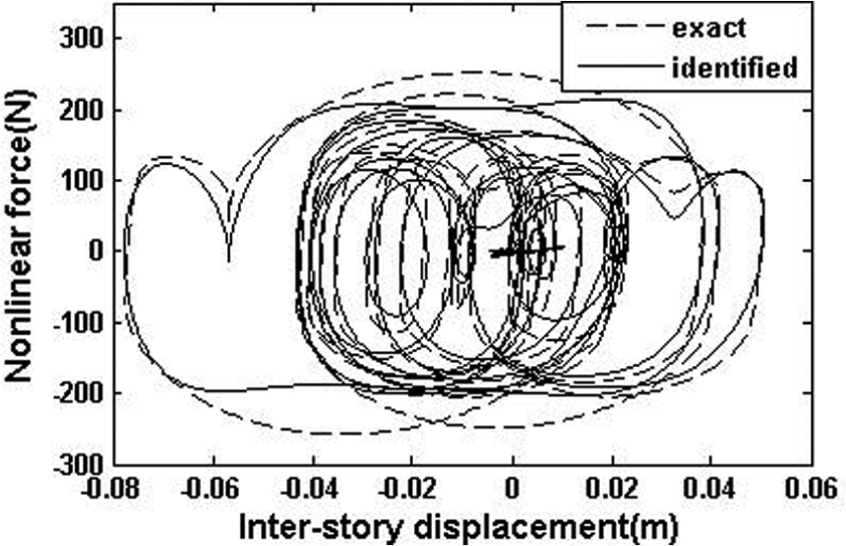
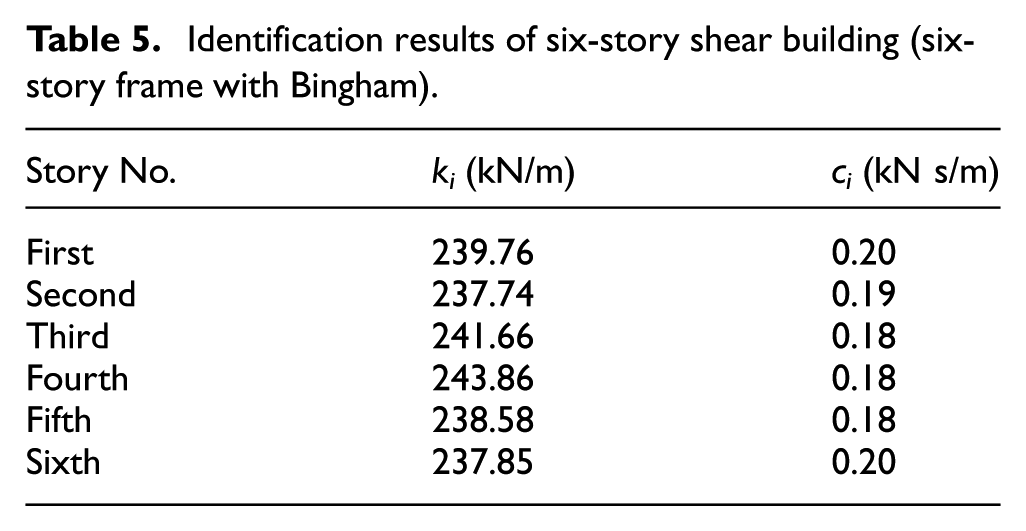
Then, the EKF is utilized to identify the nonlinear frame. The identified structural parameters and the coefficients of the power series polynomial are summarized in Tables 5 and 6. Some identified structural displacement and velocity responses are shown and compared with the related exact structural responses in Figure 3(a) to (d). Finally, the identified displacement responses and the nonlinear restoring force of the first story are shown in Figure 4. The identification results are in good agreements with the exact responses and force.
Identification results of six-story shear building (six-story frame with Bingham).
Identified coefficients of power series polynomial (six-story frame with Bingham).

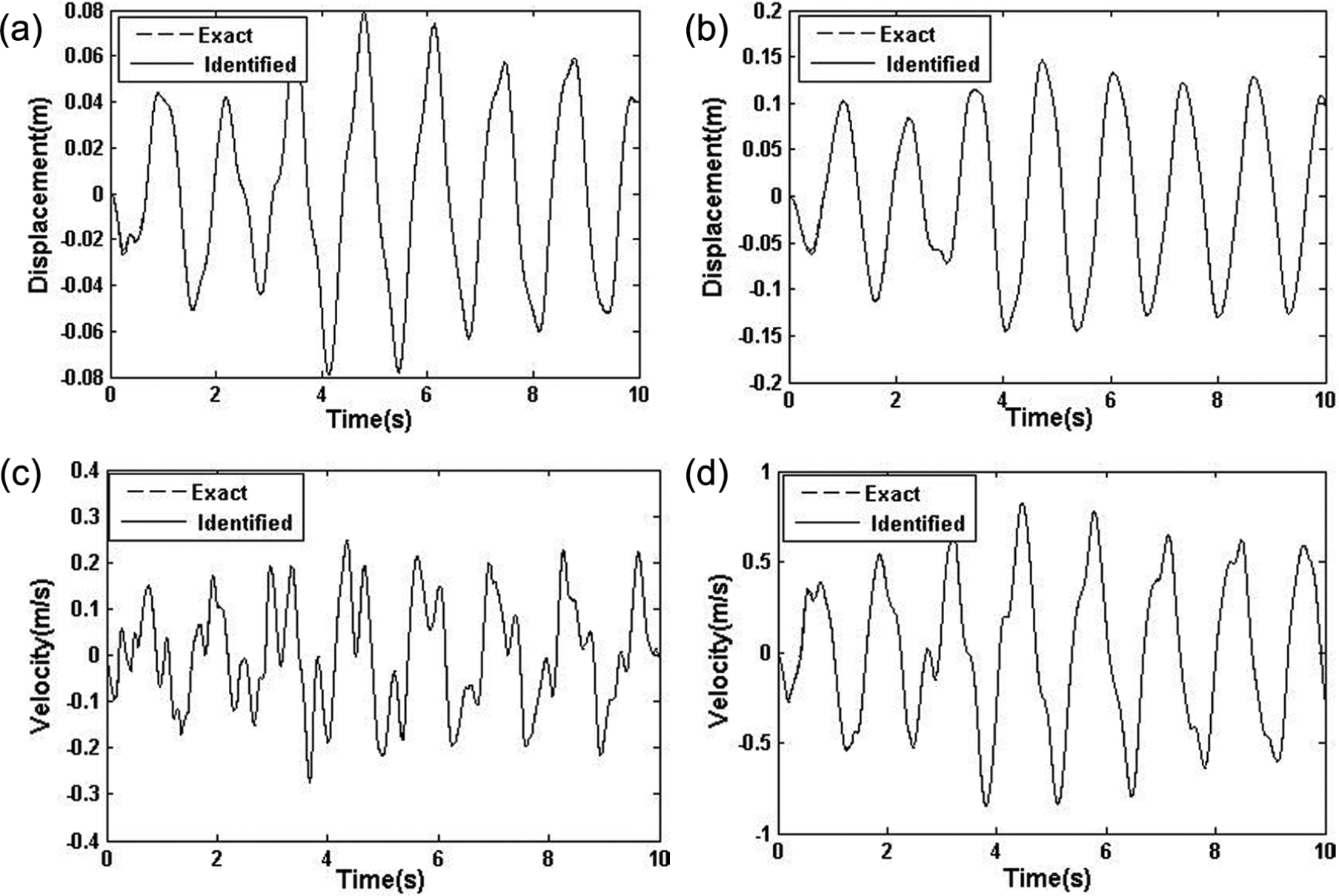
Responses of the nonlinear six-story shear frame (Bingham): (a) displacement of the second floor, (b) displacement of the sixth floor, (c) velocity of the second floor, and (d) velocity of the sixth floor.
First story nonlinear restoring force (six-story shear frame with Bingham).
Identification of a 10-story shear frame with multi-nonlinear restoring forces
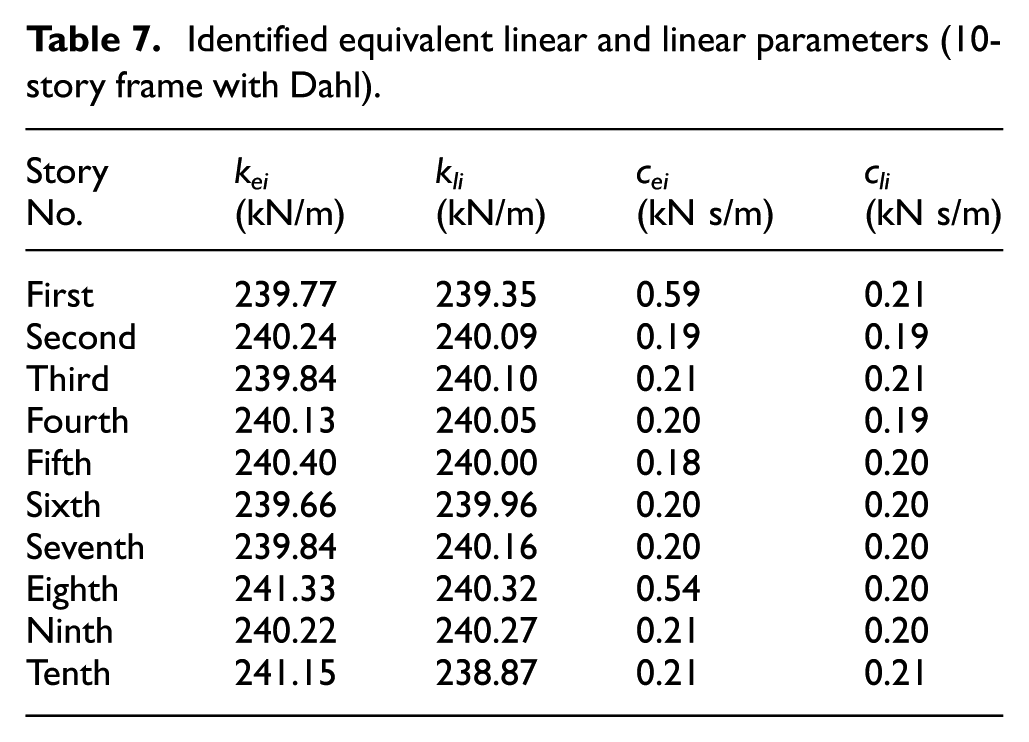
The proposed algorithm is further used to identify a 10-story nonlinear shear frame with multi-nonlinear restoring forces. The linear structural parameters of the 10-story shear frame are still selected as follows: mi = 600 kg, ki = 240 kN/m, and ci = 0.20 kN s/m (i = 1, 2,…, 10). Partial measurements of the acceleration responses first, second, fourth, sixth, and eighth floors are used for SI. The linear structural parameters of the frame can be identified by the EKF with the partial measurements of acceleration responses of the frame under low level excitation and the identification results are shown in Table 7.
Identified equivalent linear and linear parameters (10-story frame with Dahl).
Under higher level of excitation, structural nonlinearities occur in the frame. In this example, it is assumed that story nonlinear restoring forces in Dahl models exist in both the first and the eighth stories with the parameters set as follows: k01,0 = 0.02 kN/m, c01,0 = 0.20 kN s/m, fd1,0 = 100 kN, f01,0 = 0, σ1,0 = 1000 s/m; and k08,7 = 0.02 kN/m, c08,7 = 0.20 kN s/m, fd8,7 = 80 kN, f08,7 = 0, σ8,7 = 800 s/m.
An equivalent linear frame is established and identified by EKF using the measured partial nonlinear structural responses. The identification results of equivalent linear parameters are shown and compared with those of the linear frame in Table 7. From the comparisons, it is noted that there are large differences between the identified equivalent damping and linear damping parameters in the first and eighth stories, which indicate the locations of the two structural nonlinear restoring forces.
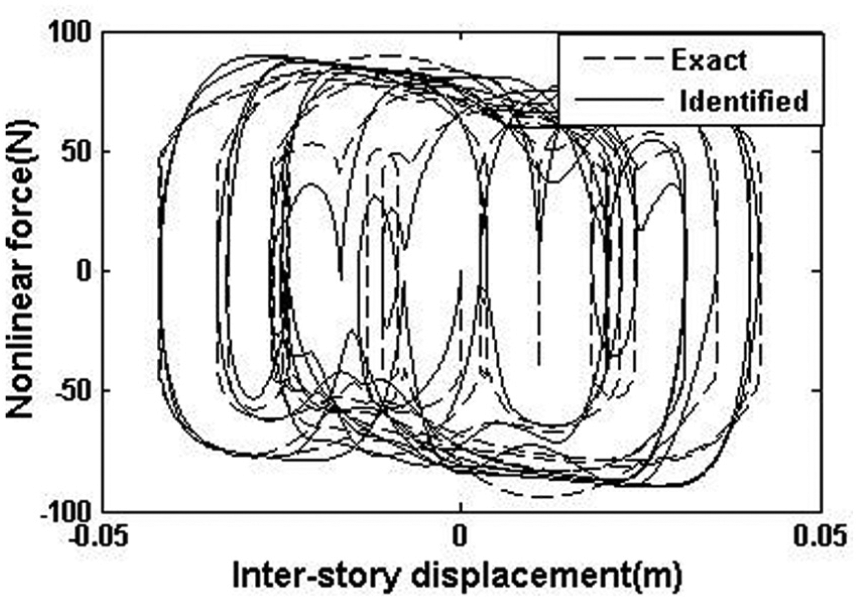
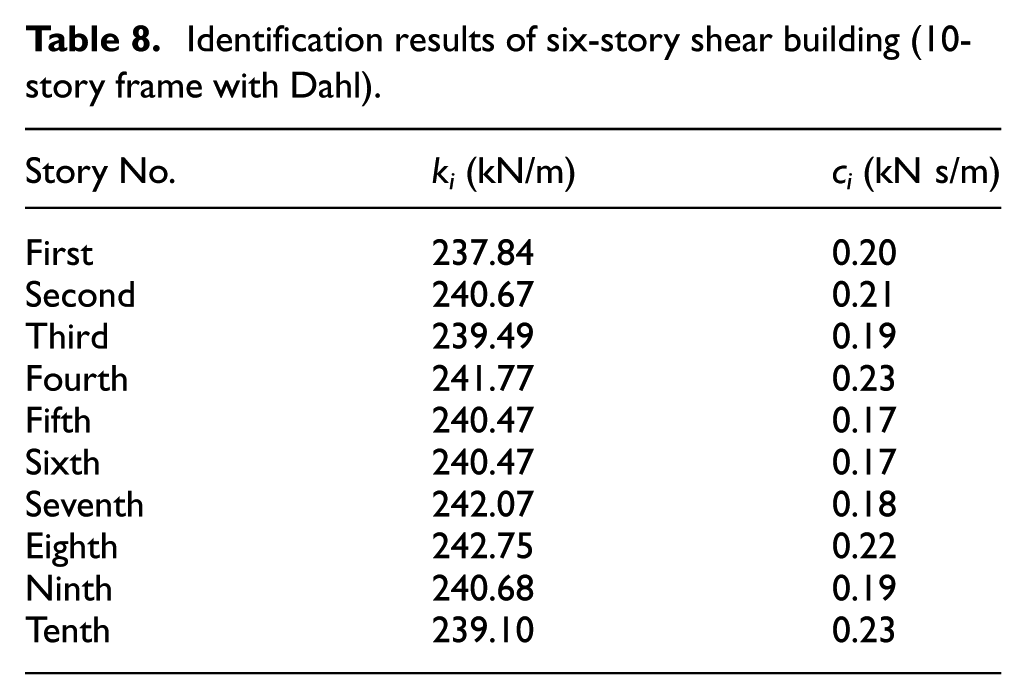
Then, the EKF is utilized to identify the nonlinear building. Tables 8 and 9 show the identified structural parameters and coefficients of the two power series polynomials. Moreover, Figure 5(a) and (b) shows the identified first and eighth story nonlinear restoring forces with comparisons to the exact forces.
Identification results of six-story shear building (10-story frame with Dahl).
Identified coefficients of power series polynomial (10-story frame with Dahl).

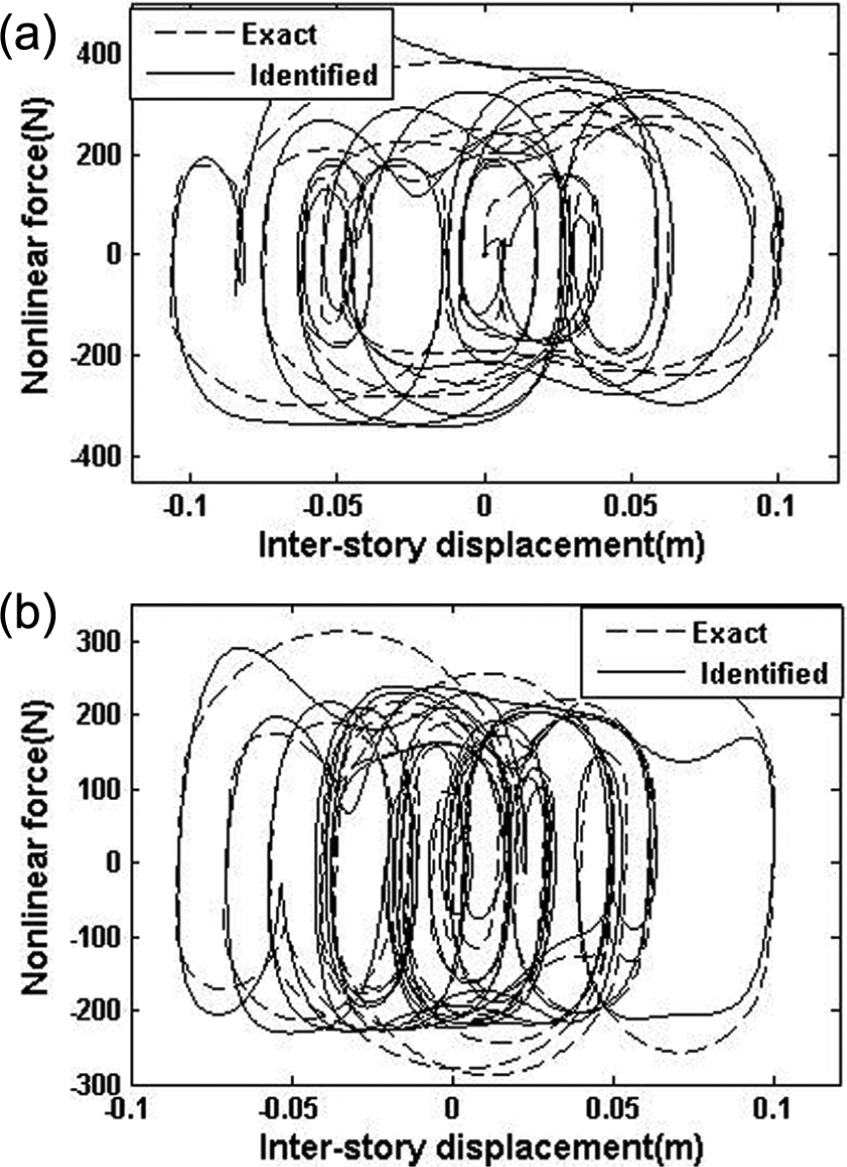
Story nonlinear restoring forces (10-story shear frame with Dahl): (a) the first story nonlinear restoring force and (b) the eighth story nonlinear restoring force.
Identification of nonlinear forces of a planar truss
To further validate the proposed algorithm for the identification of other types of nonlinear structures, the identification of model-free nonlinear forces of a planar truss shown in Figure 6 is used. It is assumed that all bars in the truss have uniform cross sections and the length of each horizontal bar is 2 m while the length of each inclined bar is
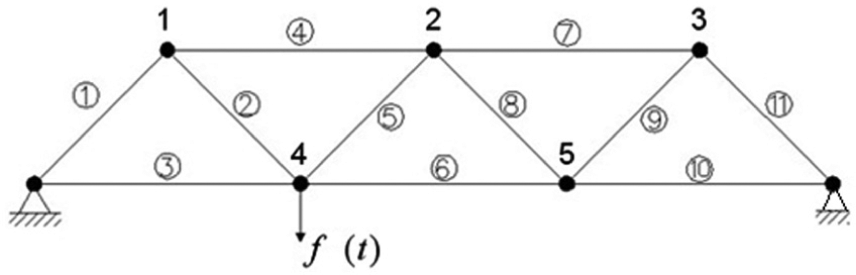
A planar nonlinear truss.
To consider partial measurements of structural responses, it is assumed that only acceleration responses in the vertical directions at nodes 1, 2, 3, 4, 5 and in the horizontal directions of nodes 1 and 4 are measured. All the measured acceleration responses are simulated by superimposing the theoretically computed responses with the stationary white noises with 5% noise in rms.
When the planar truss is subjected to strong external excitation, structural nonlinearity occurs. It is assumed that the restoring force in bar element 1 becomes nonlinear one described by the Bingham model with the parameters as follows: fc1,0 = 0.1 N, c01,0 = 0.02 kN s/m, f01,0 = 0.
The linear structural parameters of the truss can be identified by the EKF with the partial measurements of acceleration responses of the truss subject to weak external excitation and the identification results are shown in Table 10 with kli and cli being the ith identified stiffness and damping parameters, respectively.
Identified equivalent linear and linear parameters (truss with Bingham).
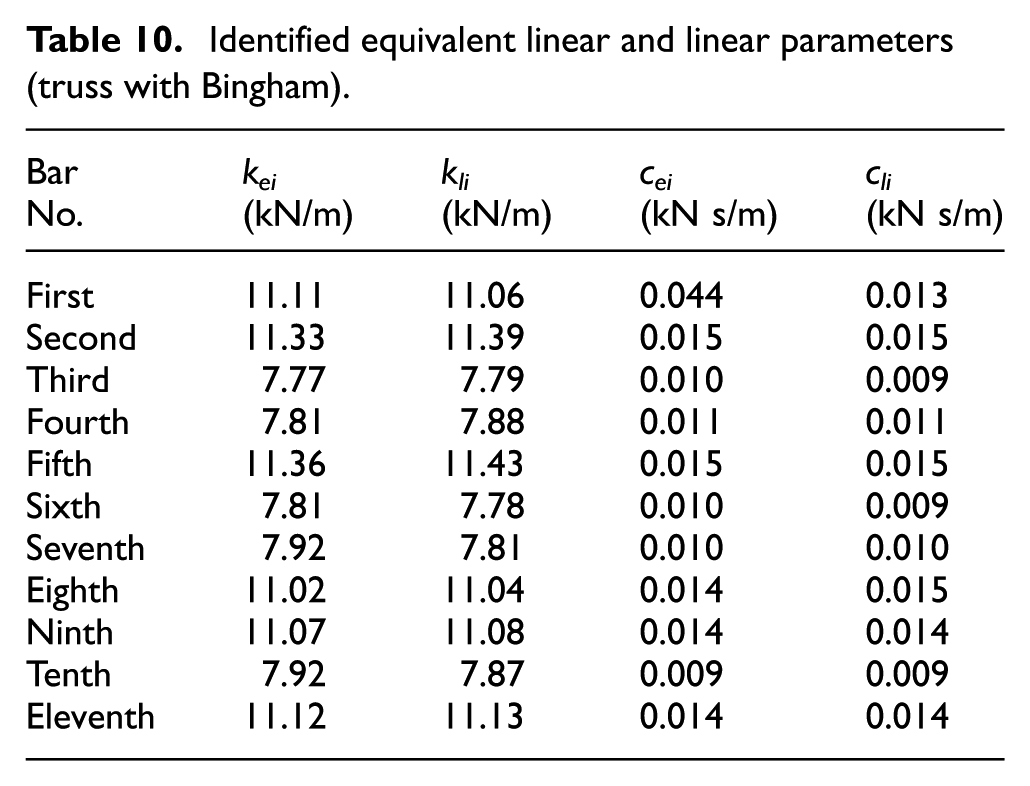
Then, an equivalent linear truss is established and identified by EKF using the measured partial nonlinear structural responses. The identification results of equivalent linear parameters are shown and compared with those of the linear ones in Table 10. From the comparison, the location of structural nonlinearity is detected.
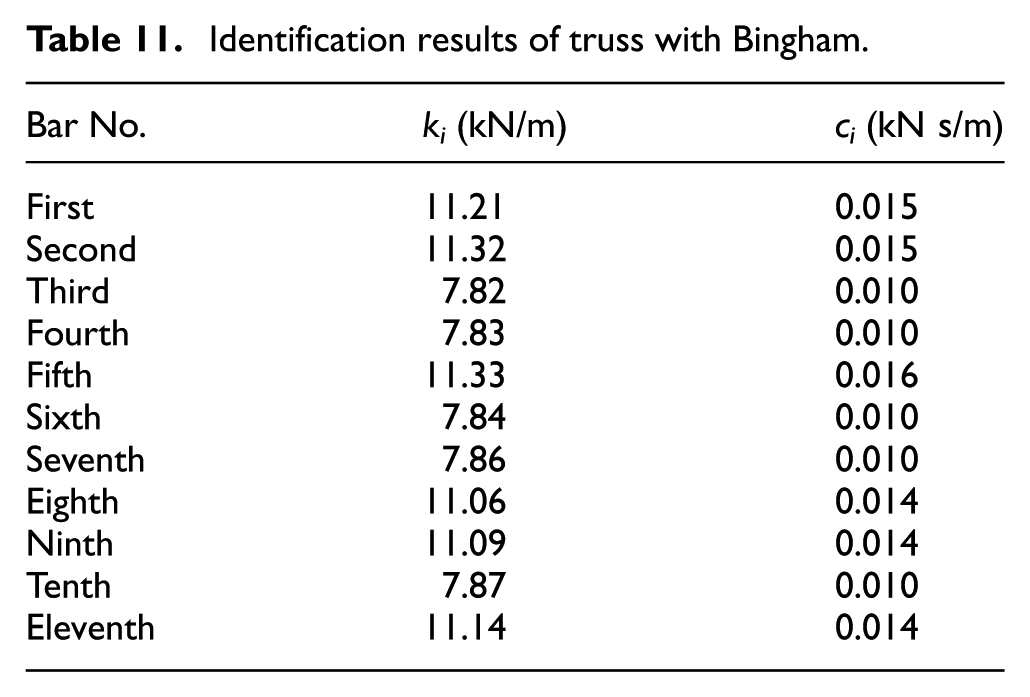
Finally, the nonlinear planar truss can be identified by EKF. In Tables 11 and 12, the identified structural parameters and the coefficients of power series polynomial are shown. The identified displacement and velocity of the first and second bar elements are shown and compared with the exact values in Figure 7(a) and (b). Also, identification behavior of the nonlinear restoring force of bar element 1 is shown in Figure 8.
Identification results of truss with Bingham.
Identified coefficients of power series polynomial (truss with Bingham).

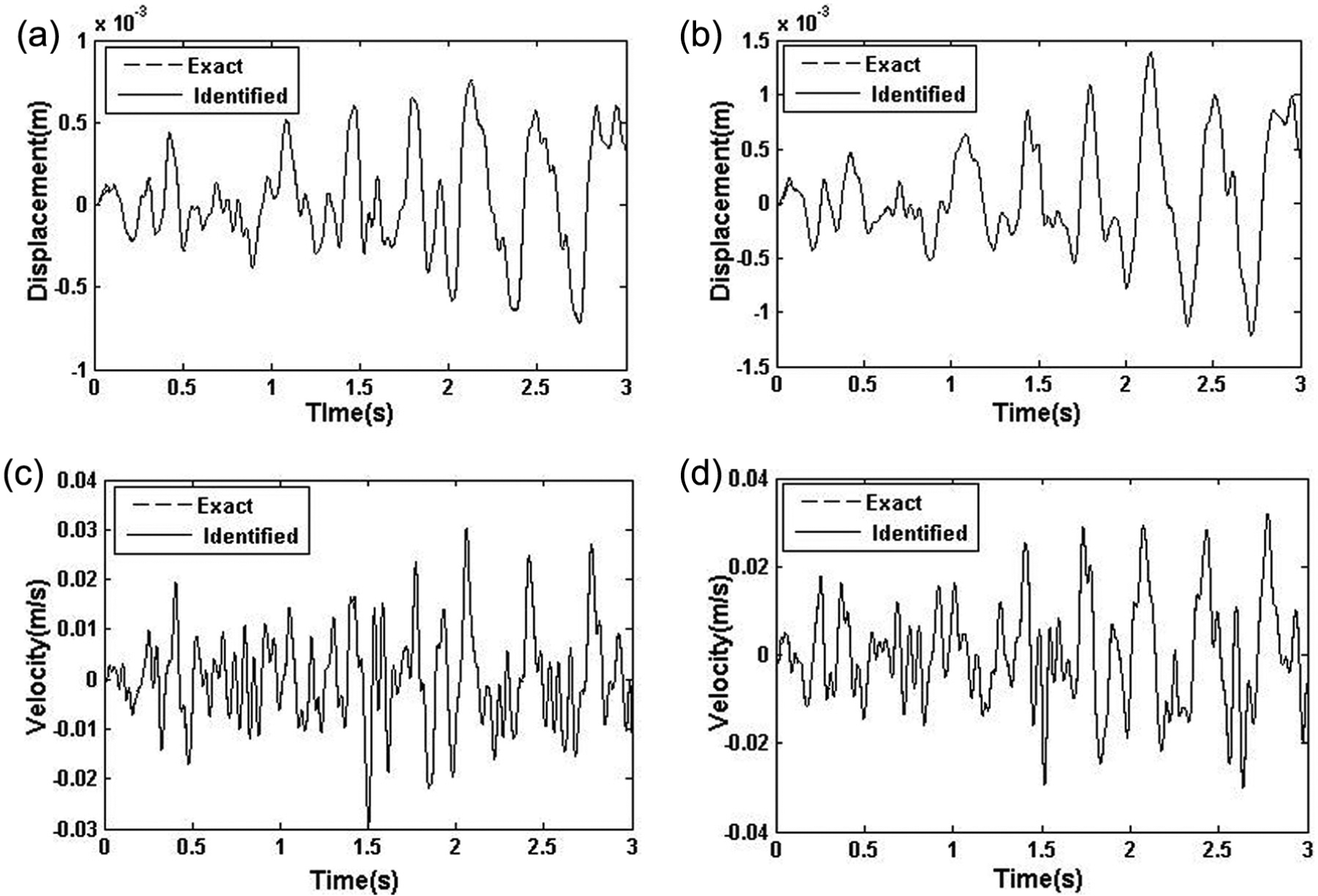
Responses of the planar nonlinear truss: (a) horizontal displacement of the first bar, (b) vertical displacement of the second bar, (c) horizontal velocity of the first bar, and (d) vertical velocity of the second bar.
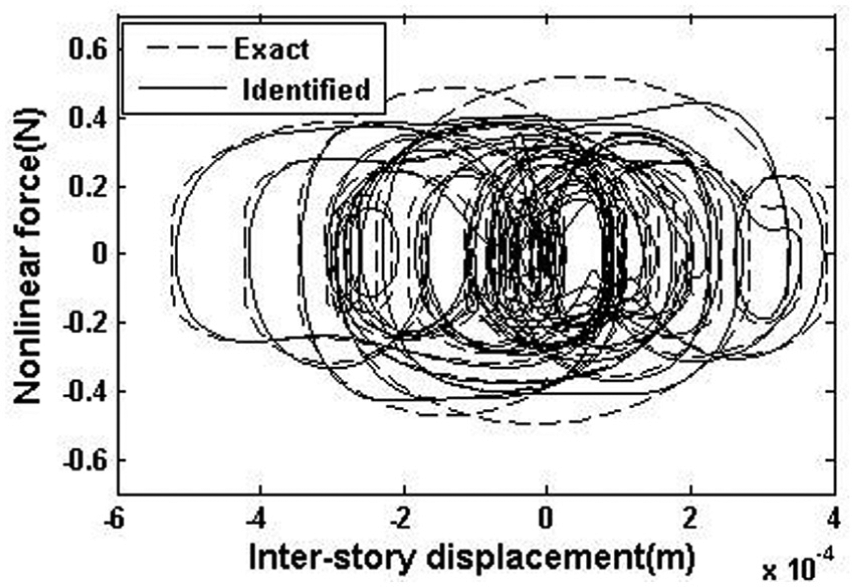
Nonlinear restoring force of the first bar.
Conclusion
In this article, an identification algorithm is proposed for the identification of model-free nonlinear restoring forces and nonlinear structural systems using only partial measurements of structural responses. First, an equivalent linear structural system is proposed for a nonlinear structure and the locations of structural nonlinearities are detected based on the differences in the identification results of the equivalent linear system and those of the related linear structures by the EKF. Also, these differences indicate the levels of structural nonlinearities. Then, the model-free nonlinear restoring forces at the locations of identified structural nonlinearities are approximated by power series polynomials. Then, EKF is adopted again for the identification of the coefficients of power series polynomials together with other structural parameters so that the characteristics of the behaviors of the model-free of nonlinear restoring forces are identified. Several numerical examples of the identification of different structures with different nonlinear restoring forces and locations have demonstrated the effectiveness of the proposed algorithm.
Since structural nonlinear restoring forces only exist in the locations of structural nonlinearities while the other structural restoring forces are linear ones, the numbers of unknown parameters in the nonlinear restoring forces are greatly reduced by the proposed algorithm. Compared with previous approaches, the computational burden of the derivation of the Jacobian matrices in EKF is also reduced for the identification of nonlinear structural systems. Therefore, proposed algorithm not only simplifies the identification of nonlinear structures, but also ensures identification convergence in the inverse problem.
In this article, the sizes of the illustrative structures are not large. The proposed algorithm can be integrated with substructure approach for the identification of large size nonlinear structures. Also, only numerical examples have been used to demonstrate the performances of the proposed algorithm. It is important to further study the experimental validation of the proposed algorithm. These works are being undertaken by the authors.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research described in this article is financially supported by the Natural Science Foundation of China (NSFC) through the Grant No. 51178406 and the Fujian Provincial Science and Technology Key Project No. 2013Y0079.